Tephys-Simulation
Werbung

Prof. Dr. R. Kessler FH-Karlsruhe, Sensorsystemtechnik,
D:\TestPDF\RT3_PDF\PLL_2.DOC
16.05.01,
Seite1
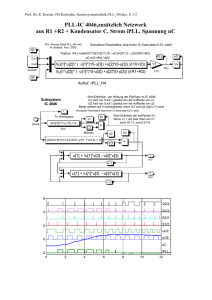
PLL- Regelung mit PLL-IC 4046 und Wavetek 185 als VCO
PLL heißt Phase Locked Loop, zu deutsch etwa „Phasen-Regel-Kreis“. Die Aufgabe einer PLL-Regelung ist, einen
„spannungsgesteuerten “ Oszillator ( VCO= Voltage Controlled Oscillator) so zu steuern, dass die Frequenz des Oszillators
„phasen-genau“ mit der „Führungsfrequenz“ übereinstimmt. Bei dem hier verwendeten IC 4046 ist ( im
eingeschwungenem Zustand) die Phasenverschiebung Null. Typische Anwendungen der PLL-Technik finden sich im
Bereich der Fernseh-und Radio-Technik. Dort werden allerdings noch Frequenzteiler verwendet, so dass nur die
„geteilten“ Frequenzen phasengenau übereinstimmen.
Beispiel: Bezugsfrequenz ist die mit einem Quarzoszillator erzeugte Frequenz fq. Sie wird durch Nq geteilt und liefert die
Frequenz f1=fq/Nq. f1 ist die Soll-Frequenz für den Phasenregelkreis. Der VC0 liefert die Frequenz fx. Sie wird geteilt
durch Nx und liefert die Frequenz f2=fx/Nx. Infolge der PLL-Regelung ist f2 phasengenau gleich f1, also fx/Nx = fq/Nq.
Man hat also die VCO-Frequenz fx = Nx * fq/Nq.
Zahlenbeispiel: fq = 100 MHz, Nq = 10000, folglich f2 = fq/Nq= 10 kHz. Folglich fx = Nx * 10 kHz. Bei Nx=1000 ergibt sich
fx= 10 MHz, bei Nx=1001 ergibt sich fx = 10.010 MHz. Mit Variation des Teilers Nx ergeben sich also phasengenaue
Frequenzen fx im Raster von 10 kHz.
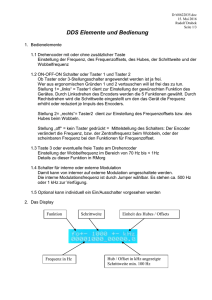
Als VCO verwenden wir bei unseren Versuchen einen Funktionsgenerator (speziell Wavetek 185) bzw. einen
Gleichstrom-Motor (mit Lichtschranke, 1 Schlitz pro Umdrehung). Beim Funktionsgenerator sollte man das erzeugte
Dreieck- oder Sinus-Signal oszillographieren. Daran erkennt man besser als am erzeugten Rechteck, ob die PLL-Regelung
OK ist. Die Funktionsweise des IC 4046 wird im Tephys-Programm erläutert (s.u.)
15 V = Ubp
4047
4093
sign in
&
C1
out
comp in
RM1
RechteckOszillator
Mit Taster S die
Soll-Frequenz ändern
VCG in
R2
C
RMp
Wavetek 185
VCO
R1
Q
S
Netzwerk TL081
4046
uC
15 V
out
Dreieck
Zähler
ca 2k
Ubn=0
NiveauVerschieber
ca 2k
10 MuF
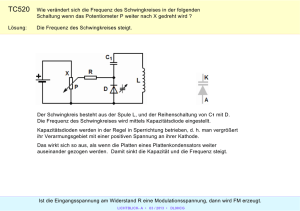
Dimensionierung für einige Bereiche des VCO „Wavetek 185“
Wenn der Schalter S (beim Rechteck-Oszillator) offen ist: tiefe Frequenz, wenn geschlossen: hohe Frequenz
4047
fmin
fmax
Wavetek-Bereich
Netzwerk
Einstellzeit
RM1=24 kOhm
C
R2
R1
tief->hoch->tief
RMp=0.7 ’’
--------------------------------------------------------------------------C1=10nF
400 Hz 4 kHz
0. 5 kHz
1 /uF 3.8 k 3.8 k 10 ms 20 ms
100 nF
40 Hz 400 Hz
0..500 Hz
10 /uF 3.8 k 3.8 k 10 ms 200 ms
’’
’’
’’
’’
’’
10 /uF 3.8 k
0
50 ms 300 ms
1 /uF
4 Hz 400 Hz
0..500 Hz
10 /uF 18 k
10 k 0.5 sec 2 sec
1 nF
4 kHz 40 kHz 0 .50 kHz
1 /uF
3 k 0.3 k
5 ms 10 ms
0.1 nF
40 kHz 330 kHz 0 500 kHz
1 /uF.. 1 k
1 k.
Prof. Dr. R. Kessler FH-Karlsruhe, Sensorsystemtechnik,
D:\TestPDF\RT3_PDF\PLL_2.DOC
16.05.01,
Seite2
Tephys-Datei c:\Regel\ PLL_neu\wavetm5.txt
1
2
3
4
5
u1alt=u1
{ u1alt = alter Wert von u1, benötigt für Finden der Auf-Flanke von u1 }
u2alt=u2
{ u2alt = alter Wert von u2 „
„
„
„ „
„
„ u2 }
Q1alt=Q1
{ Q1alt = alter Wert von Q1 , benötigt für Rücksetzen Flip-Flop}
Q2alt=Q2
{ Q2alt = alter Wert von Q2 , ebenfalls........}
f1=f10+f1'*(t-tf1)+aP*ja(t-t1)*ja(t2-t) { f1= Führfrequenz. f10=Grundwert, Änderung
von f1 wahlweise durch linearen Anstieg (mit f1’*(t-tf1)
oder sprunghaft im Bereich t1..t2 (mit aP*ja(t-t1)*ja(t2-t) ) }
wi1=wi1+f1*dt
{ wi1= „Winkel“ von f1 = Zeitintegral der Frequenz f1, zur Bildung von u1 }
6
7 u1=ja(sw1-saeg(wi1))
8
{ u1= Rechteckspannung mit Frequenz f1. u1 gebildet aus
Sägezahn saeg(wi) : Wenn Schwelle sw1 > saeg(wi1), dann ist u1 = 1 sonst ist u1 = 0 }
S1=ja(u1-u1alt)
{ S1= „Sprung“ von u1: Wenn u1 von low (=0) nach high(=1) geht, dann ist
S1 = 1, sonst ist S1 =0. Funktion: Wenn u1 größer als der „alte“ Wert u1alt, nur dann ist S1 = 1 }
Z=ja(t-tZ1)*ja(tZ2-t)*(aZ+az*sin(2*pi*fz*t))
{ Z = Störfunktion , nicht benutzt}
9
10 Y=begr(Y0+ja(reg)*YMai,Ymax,0) { Y= Stellgröße für Erzeugung der Frequenz f2}
11 f2id=begr(kVCO*fmax*Y,nf*fmax,0) { f2id = „idealer“ Wert der Frequenz f2 : Die
Steuerspannung Y erzeugt die Freq. kVCO * fmax* Y, sie wird aber begrenzt auf nf*fmax und ist >= 0}
12 f2=f2id*ja(f2id) { f2 = Frequenz des VCO }
13 iPLL=nein(Q1*Q2)*(ja(Q1)*(Ubp-uC)+ja(Q2)*(Ubn-uC))/(R1+R2)
{ iPLL ist der Strom, den das PLL-IC an seinem Ausgang liefert:
Wenn beide internen FlipFlops high sind (also Q1*Q2 =1), dann ist der Ausgang intern hochohmig
geschaltet, also der Strom =0.
Wenn Q1 high ist, ist der Ausgang mit der positiven Betriebs-Spannung Ubp verbunden,
also fließt der Strom (Ubp-uC )/(R1+R2).
Wenn Q2 high ist, ist der Ausgang mit der negativen Betriebs-Spannung Ubn verbunden,
also fließt der Strom (Ubn-uC)/(R1+R2). }
14 uC=uC+iPLL*dt/C { uC = Kondensator-Spannung. Der Kondensator wird mit dem
Strom iPLL geladen }
15 YMai=uC+R2*iPLL { Ymai = Stellspannung für den VCO . Ymai = Spannung am
Verbindungspunkt von R1 und R2. Damit dieser Punkt nicht „belastet“ wird, wird er mit einem
Spannungsfolger verbunden (vgl. Schaltung). }
16 wi2=wi2+f2*dt
{ wi2 = Zeitintegral der Frequenz f2 des VCO }
17 u2d=drei(wi2)
{ u2d = Dreieckspannung des VCO. sie hat die Frequenz f2 }
18 u2=ja(sw2-saeg(wi2)) { u2= Rechteckspannung, gewonnen aus der VCO- Dreieckspannug
durch Komparator}
19 S2=ja(u2-u2alt) { S2 =1 beim Sprung von u2 von low nach high, sonst =0, vgl. S1 }
20 Q1=ja(S1)+nein(S1)*Q1-Q1alt*Q2alt
{ Q1= Ausgang FlipFlop1: Es wird gesetzt,
wenn S1=1 wird (also von der Auf-Flanke von u1) und wird rückgesetzt wenn beide Flip-Flops high sind }
21 Q2=ja(S2)+nein(S2)*Q2-Q1alt*Q2alt{ Q1 = Ausgang FlipFlop2: Es wird von S2 gesetzt
und rückgesetzt , wenn beide Flip-Flops high sind. }
22 Utri=KQ*(Q1-Q2) { Utri = „symbolische“ Differenz Q1-Q2. Mit der hier benutzten Schaltung
kann Utir NICHT gemessen werden }
23 t=t+dt
Kommentar in der Tephys-Datei
PLL, Heft R12, 23.8.95, Heft R14,S.145, R19,110
Prof. Dr. R. Kessler FH-Karlsruhe, Sensorsystemtechnik,
D:\TestPDF\RT3_PDF\PLL_2.DOC
16.05.01,
Seite3
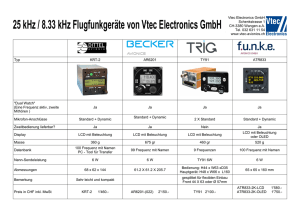
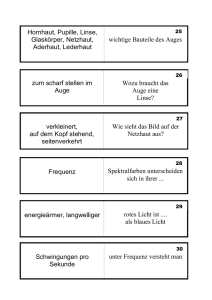
u1=FührungsSchwingung, u2= nachgeführte Schwingung
S1 bzw. S2 high-Impulse (Dauer=dt) beim low->high Sprung von u1 bzw. u2
Q1,Q2 Flip-Flop-Ausgänge des "zweiten" Phasen-Komparators im IC 4046:
Q1 wird gesetzt von S1 und zurückgesetzt, wenn Q1 UND Q2 high sind.
Q2 " " " S2 " "
" " " " " " .
(Lit: Tietze-Schenk: Frequenzempfindlicher Phasendetektor)
PLL. Ziel: Freq. f2 so ändern, dass u2 phasenstarr gleich u1 wird.
als VCO Wavetek, vgl Exp Heft R14 S.145, 5.5.96
Datei Wavetm5.txt : Methode Maier, ab Okt. 96, Exp R19,110..
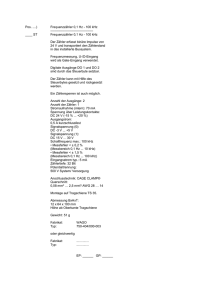
Hier wird geregelt (reg=1)
Der VCO (=Wavetek185)
ist im Bereich 0 bis 500 Hz.
Die SollFrequenz f1 springt
von 50 auf 450 Hz und
zurück. Zu optimieren sind
die 3 Parameter R1, R2, C.
Hier ist C=10 Mikrofarad,
R1=500 Ohm, R2=1000
Ohm.
Prof. Dr. R. Kessler FH-Karlsruhe, Sensorsystemtechnik,
D:\TestPDF\RT3_PDF\PLL_2.DOC
16.05.01,
Seite4
Prof. Dr. R. Kessler FH-Karlsruhe, Sensorsystemtechnik,
D:\TestPDF\RT3_PDF\PLL_2.DOC
16.05.01,
Seite5
Prof. Dr. R. Kessler FH-Karlsruhe, Sensorsystemtechnik,
D:\TestPDF\RT3_PDF\PLL_2.DOC
16.05.01,
Seite6