2. Maxwellsche Gleichungen im Vakuum
Werbung

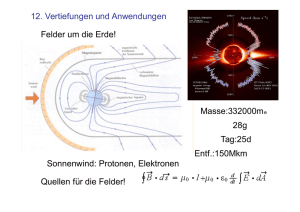
2. Maxwellsche Gleichungen im Vakuum Die Maxwellsche Theorie ist eine Kontinuumstheorie, die auf die atomare Struktur der Materie nicht eingeht und die auftretenden Größen als kontinuierliche Variable auffaßt. Aus diesem Grunde genügt es, zunächst die Gleichungen im Vakuum zu betrachten. Später werden dann die in Materie nötigen Modifikationen eingeführt. 2.1 Feldbegriff Die meßbaren physikalischen Größen sind Kräfte. Sie werden normalerweise durch Kontakte wie Druck, Kollision oder Reibung übertragen. Elektromagnetische Kräfte hingegen brauchen weder Kontakt noch ein übertragendes Medium. Man kann daher definieren: Ein elektromagnetisches Feld ist ein Gebiet, in welchem Kräfte wir” ken können“ . Das Konzept des Feldes geht auf Michael Faraday zurück, der Flußlinien (Feldlinien) eingeführt hat, um Vektorfelder darzustellen. Feldlinien lassen sich durch ein schrittweises Vorgehen konstruieren: 1) In einem Punkt r = r(x, y, z) wird die Kraft K gemessen. 2) Die Meßapparatur wird ein kleines Stück ∆r in Richtung der vorher gemessenen Kraft bewegt. 3) Kraftmessung im Punkt r + ∆r. 4) Wiederholung der Schritte 2 und 3. Die zurückgelegte Kurve beschreibt eine Feldlinie. Das Feld G ist tangential zur Feldlinie. 5) Die Stärke der Kraft, d.h. des Feldes, kann durch die Dichte der Feldlinien dargestellt werden. Eine Feldlinie ist somit eine Kurve im Raum, die in jedem Punkt tangential zu dem in diesem Punkt gegebenen Feldvektor verläuft. Der Richtungssinn des Feldvektors wird durch eine Pfeilspitze in der Feldlinie angegeben. Mathematisch beschreibt man Feldlinien durch Differentialgleichungen, indem man das Wegelement ∆r differentiell klein und parallel zum Feldvektor wählt, so daß das Kreuzprodukt verschwindet 30 2. Maxwellsche Gleichungen im Vakuum dr × G = 0 . (2.1) Gx : Gy : Gz = dx : dy : dz . (2.2) In kartesischen Koordinaten wird daraus Das Feldlinienbild eines Vektorfeldes, Abb. 2.2a, stellt die Gesamtheit aller Feldlinien im Raum dar. Die Stärke des Feldes wird durch die Dich” te“ der Feldlinien ausgedrückt. Dichte der Feldlinien bedeutet hierbei die Anzahl der Linien, die durch ein Einheitsflächenelement senkrecht zu den Linien hindurchgeht. Feldlinien werden also nicht als kontinuierliche Linienschar gezeichnet, sondern eine Feldlinie repräsentiert eine Feldröhre“ oder ” auch Flußröhre, Abb. 2.1. Eine solche Flußröhre ist dadurch definiert, daß durch jeden Röhrenquerschnitt F derselbe Fluß Z G · dF ψ= F geht. Feldlinie Flußröhre Röhrenquerschnitt F Abb. 2.1. Flußröhre mit Feldlinie a) b) −Q +Q −Q +Q PSfrag replacements Abb. 2.2. Darstellung des elektrischen Feldes zwischen zwei Ladungsanordnungen. (a) Feldlinien, (b) Vektorbild 2.2 Ladungen. Ströme 31 So klar und einleuchtend obige Definition eines Feldbildes ist, so wenig praktisch ist die Darstellung der Feldstärke durch die Dichte der Linien; denn die Stärke eines dreidimensionalen Feldes kann man nicht durch die Feldliniendichte im Zweidimensionalen darstellen. Dies geht nur, wenn auch die Felder zweidimensional sind. Für die Darstellung von dreidimensionalen Feldern ist die Darstellung durch Vektoren im Raum (Abb. 2.2b) im allgemeinen besser geeignet. 2.2 Ladungen. Ströme Elektrische Ladung ist eine Eigenschaft von Elementarteilchen. Die kleinste Einheit ist die Elementarladung e = 1.602 · 10−19 C (1 C = 1 As) . Elektronen tragen die Ladung −e und Protonen die Ladung +e. Zur Zeit Maxwells war es noch nicht bekannt, daß Ladung in diskreten Beträgen auftritt, und da bei Experimenten meistens sehr viele Elementarladungen gleichzeitig vorhanden sind, wird der diskrete Zustand maskiert. Maxwells Theorie ist daher eine Theorie kontinuierlicher Ladungsverteilungen. Für die mathematische Behandlung ist es nützlich den Begriff der Punktladung einzuführen, d.h. eine Ladungsmenge Q, die sich in einem infinitesimalen Volumen befindet. Jede makroskopische Verteilung läßt sich dann als aus Punktladungen zusammengesetzt vorstellen. Man unterscheidet: Linienladung, bei welcher die Ladung längs einer Linie L mit der Linienladungsdichte qL verteilt ist, Abb. 2.3a. Sie setzt sich aus Punktladungen dQ = qL dL mit [qL ] = As/m (2.3) zusammen. Flächenladung, bei welcher die Ladung über eine Fläche F mit der Flächenladungsdichte qF verteilt ist, Abb. 2.3b. Sie setzt sich aus Punktladungen dQ = qF dF mit [qF ] = As/m2 (2.4) zusammen. Raumladung, bei welcher die Ladung in einem Volumen V mit der Raumladungsdichte qV verteilt ist, Abb. 2.3c. Sie setzt sich aus Punktladungen dQ = qV dV zusammen. mit [qV ] = As/m3 (2.5) 32 2. Maxwellsche Gleichungen im Vakuum a) b) Linie L c) qF qV qL Fläche F Volumen V Abb. 2.3. (a) Linienladung, (b) Flächenladung, (c) Raumladung Ströme sind bewegte Ladungen und man unterscheidet dementsprechend: Linienstrom J L = qL v mit [J L ] = A (2.6) mit [J F ] = A/m (2.7) Flächenstromdichte J F = qF v Stromdichte J = qV v mit [J ] = A/m2 (2.8) Bei der Stromdichte, der am häufigsten vorkommenden Größe, lassen wir bequemlichkeitshalber den Index V weg. Fließt eine Stromdichte durch eine Fläche, so ergibt sich der die Fläche durchsetzende Gesamtstrom I aus der Integration der Normalkomponente Z Z I= Jn dF = J · dF . (2.9) F F Tritt ein Linienstrom J L durch eine Fläche, ist I = JL und man benutzt daher auch I anstelle von J L . Selbstverständlich gibt auch die bewegte Punktladung einen Punktstrom“ , der aber hier nicht benötigt wird. ” 2.3 Coulombsches Gesetz. Elektrisches Feld Die Theorie der Elektrostatik basiert auf dem Prinzip der Superposition und dem experimentellen Postulat, daß elektrische Ladungen eine gegenseitige Kraft ausüben, welche proportional dem Produkt der Beträge der Ladungen und umgekehrt proportional dem Quadrat des Abstandes ist. Sind die Ladungen gleichnamig, stoßen sie sich ab, sind sie ungleichnamig, ziehen sie sich 2.4 Satz von Gauß 33 an. Dieses Egebnis wurde von H. Cavendish 1772-73 experimentell ermittelt aber nicht veröffentlicht. Hingegen wurde es als Coulombsches Gesetz K= Q1 Q2 er 4πε0 r2 mit [K] = N = mkg/s2 = Ws/m (2.10) bekannt nach Charles Augustin de Coulomb, der es 1785 mit einer völlig anderen Technik bewies. Die Konstante 1/4πε0 ist eine Folge des gewählten MKSA-Maßsystems. ε0 ist die Dielektrizitätskonstante des Vakuums und hat den Wert 10−9 As As ≈ . (2.11) Vm 36π Vm Das Coulombsche Gesetz legt die Interpretation nahe, daß eine direkte Wechselwirkung zwischen den Ladungen stattfindet. Mit Einführung des Feldbegriffs durch Faraday und Maxwell lag eine andere Interpretation näher. Eine Ladung, die Quelle, erzeugt ein elektrisches Feld E, das nur von der Quelle und ihrer Position abhängt. Dieses Feld übt eine Kraft auf eine zweite Ladung aus. In der Tat hat sich allgemein bestätigt, daß ein elektrisches Feld E eine Kraft auf eine Ladung Q ausübt entsprechend ε0 = 8.854 · 10−12 K = QE . (2.12) Aufgrund der Ergebnisse (2.10), (2.12) definiert man: Das elektrische Feld ist die Kraft pro Ladung, die eine infinitesimal kleine Probeladung dQ erfährt E(r) = dK(r) dQ [E] = V/m (2.13) 2.4 Satz von Gauß Die Größe ε0 E wird häufig als elektrische Flußdichte bezeichnet und das Integral über eine Fläche gibt den elektrischen Fluß an Z ε0 E · dF . ψe = (2.14) F Die Begründung dafür liegt im Coulombschen Gesetz. Vergleicht man (2.10) mit (2.12), so ergibt sich das elektrische Feld einer Punktladung als E= Q er . 4πε0 r2 (2.15) Wählt man für die Fläche F in (2.14) eine Kugeloberfläche mit Radius r, in deren Mittelpunkt sich Q befindet, so wird 34 2. Maxwellsche Gleichungen im Vakuum I O ε0 E · dO = Z 2π 0 Z π 0 Q 2 r sin ϑ dϑ dϕ = Q , 4πr2 (2.16) d.h. der elektrische Fluß entspricht der Ladung Q. Bemerkenswerterweise ist es dabei egal, ob die Integration über eine Kugeloberfläche oder irgendeine Fläche erfolgt. Solange Q umschlossen wird, ergibt der elektrische Fluß die Ladung. Der Beweis dafür läßt sich leicht mit Hilfe des Gaußschen Integralsatzes führen. Man wählt ein Volumen mit der Kugeloberfläche O1 der Verbindungsröhre F und einer beliebigen Oberfläche O (Abb. 2.4) I I Z Z ε0 E · dO . ε0 E · dO + ε0 E · dF + ∇ · (ε0 E) dV = O1 F V O Das gewählte Volumen schließt die Ladung aus, und da wegen (1.83) die Divergenz des elektrischen Feldes überall, mit Ausnahme am Ort der Ladung, verschwindet, ist das Volumenintegral null. 2ε → 0 n V F PSfrag replacements O Q n O1 Abb. 2.4. Berechnung des elektrischen Flusses einer Punktladung Das Integral über O1 ist wegen der nach innen gerichteten Normalen negativ gleich dem Integral in (2.16) und das Integral über die Röhre verschwindet. Somit bleibt I 0 = −Q + ε0 E · dO , O d.h. das Flußintegral über eine beliebige Oberfläche ergibt die Ladung. Im Falle einer Ansammlung von Ladungen oder einer Ladungsverteilung stellt man sich diese aus Punktladungen zusammensetzt vor und wegen des Superpositionsprinzips folgt, daß das Flußintegral gleich der Gesamtladung ist I ε0 E · dO = Qgesamt . (2.17) O Die Ladung kann aus Punktladungen, Linien-, Flächen- und Raumladungen bestehen. Benutzt man stellvertretend eine stetige Ladungsverteilung wird aus (2.17) 2.5 Biot-Savartsches Gesetz. Durchflutungssatz I O ε0 E · dO = Z qV dV . 35 (2.18) V Die Gleichung (2.17) und auch ihre Form (2.18) für kontinuierliche Ladungsverteilungen heißt Satz von Gauß. Die Form (2.18) stellt zugleich die dritte Maxwellsche Gleichung in Integralform dar. 2.5 Biot-Savartsches Gesetz. Durchflutungssatz 1819 wurde von Hans Christian Oersted experimentell festgestellt, daß ein konstanter Strom in einem Leiter ein Drehmoment auf eine Kompaßnadel ausübt. Damit war erstmals eine Verbindung zwischen Elektrizität und Magnetismus hergestellt. Danach gab es intensive Arbeiten von André-Marie Ampère, Jean-Babtiste Biot und Felix Savart. 1825 hat Ampère die grundlegende Gleichung für den Elektromotor entwickelt. Dies ist das erste Ampèresche Gesetz und lautet in moderner Schreibweise Ws Vs . (2.19) dK = I × B dl mit [B] = 2 , [K] = N = m m Es gibt die Kraft an, die die magnetische Induktion B auf einen Strom I der Länge dl ausübt. Wendet man (2.19) auf eine Punktladung an (I dl = Qv), die sich mit der Geschwindigkeit v bewegt, wird aus (2.19) die Lorentzkraft K = Qv × B . (2.20) Einen Monat nach Ampère entstand das Biot-Savartsche Gesetz (ebenfalls in moderner Schreibweise) Z µ0 I ds0 × (r − r 0 ) B(r) = . (2.21) 4π S |r − r 0 |3 Es gibt die magnetische Induktion B im Punkt r an, welche durch einen dünnen, stromführenden Leiter der Form S erzeugt wird. Aus diesen Arbeiten ist dann das zweite Ampèresche Gesetz , auch Durchflutungssatz genannt, entstanden I B · ds = µ0 Igesamt . (2.22) S Es besagt, daß das Wegintegral der magnetischen Induktion längs einer geschlossenen Kurve gleich ist dem von der Kurve eingeschlossenen Gesamtstrom. Der Strom kann aus Linien-, Flächenströmen oder Stromdichten bestehen. Betrachtet man nur stetige Stromverteilungen, wird aus (2.22) I Z (2.23) B · ds = µ0 J · dF , S F 36 2. Maxwellsche Gleichungen im Vakuum wobei S den Rand der Fläche F bildet und Umlaufsinn und Flächennormale der Rechtsschraubenregel folgen. Die Konstante µ0 ist die Permeabilitätskonstante des Vakuums und hat den Wert Vs . (2.24) µ0 = 4π · 10−7 Am Sie ist eine Folge des gewählten MKSA-Maßsystems. Anmerkung: µ0 und ε0 (2.11) hängen über die Lichtgeschwindigkeit im Vakuum zusammen m 1 ≈ 3 · 108 . (2.25) c0 = √ µ 0 ε0 s Der Durchflutungssatz spielt in der Magnetostatik eine ähnlich fundamentale Rolle wie der Satz von Gauß in der Elektrostatik. 2.6 Vierte Maxwellsche Gleichung Das Biot-Savartsche Gesetz beinhaltet eine schwerwiegende Schlußfolgerung. Analog zu (1.58) erhält man ∇ 1 r − r0 =− 0 |r − r | |r − r 0 |3 und wegen (1.56) wird µ ¶ ds0 1 ds0 × (r − r 0 ) 0 ∇× . = ∇ × ds = |r − r 0 | |r − r 0 | |r − r 0 |3 Einsetzen in (2.21) und Vertauschen der Integration und Differentiation gibt ½ ¾ Z µ0 I ds0 B =∇× . (2.26) 4π S |r − r 0 | Bei obigen Umformungen mußte darauf geachtet werden, daß der NablaOperator auf die ungestrichenen Variablen (x, y, z) wirkt, wohingegen die gestrichenen Variablen (x0 , y 0 , z 0 ) die Integrationsvariablen darstellen. Nun kann man die Divergenz von B bilden, und da die Divergenz einer Rotation immer verschwindet (1.63), erhält man ∇·B =0 , (2.27) d.h. es gibt keine isolierbaren Quellen des Magnetfeldes oder anders ausgedrückt es gibt keine magnetischen Monopole. Durch Anwenden des Gaußschen Integralsatzes auf (2.27) ensteht die Integralform des Gesetzes (2.27) I Z B · dO = 0 . (2.28) ∇ · B dV = V O Die Gleichungen (2.27) und (2.28) stellen die vierte Maxwellsche Gleichung dar. 2.7 Induktionsgesetz 37 2.7 Induktionsgesetz Nach der Entdeckung Oersteds, daß ein Strom ein Magnetfeld erzeugt, wollte Faraday nachweisen, daß Magnetismus auch Elektrizität erzeugen kann. Dem lag der Glaube an die Vertauschbarkeit von Ursache und Wirkung zugrunde. 1831 gelang ihm der Nachweis für zeitlich veränderliche Magnetfelder. Seine Ergebnisse wurden später von Maxwell mathematisch formuliert zum Induktionsgesetz (Faradaysches Induktionsgesetz, zweite Maxwellsche Gleichung) Z I d 0 B · dF . E · ds = − Uind = (2.29) dt F S Es besagt, daß das Wegintegral des elektrischen Feldes entlang einer geschlossenen Kurve S gleich ist der negativ zeitlichen Änderung des magnetischen Flusses Z B · dF , ψm = (2.30) F der durch die von der Kurve S umschlossenen Fläche geht. Richtung des Flusses und Umlaufsinn sind durch die Rechtsschraubenregel verknüpft. E 0 ist die elektrische Feldstärke, die im Ruhesystem des Wegelements ds herrscht. Viel Verwirrung entsteht bei der Anwendung des Induktionsgesetzes im Falle von bewegten Flächen F (t) mit bewegten Rändern S(t). Die Gründe sind verschiedene Definitionen der induzierten Spannung Uind in der Literatur und die nicht immer saubere Unterscheidung zwischen langsam und schnell (relativistisch) bewegten Größen. Eine tiefer gehende Diskussion des Induktionsgesetzes im Falle von schnell bewegten Größen erfordert das Befassen mit der speziellen Relativitätstheorie und soll hier nicht geführt werden. Sie ist auch nicht unbedingt nötig, da die meisten technischen Vorgänge eben nicht mit relativistischen Geschwindigkeiten vor sich gehen. Dennoch soll noch einmal auf den Gültigkeitsbereich der hier verwendeten Form (2.29) explizit eingegangen werden. Alle Größen, mit Ausnahme von E 0 , sind Größen welche im ruhenden Laborsystem gemessen sind. Sie stimmen mit den Größen in langsam bewegten, v ¿ c0 , Referenzsystemen überein. E 0 hingegen ist die elektrische Feldstärke, die im Ruhesystem eines langsam bewegten Wegelements ds herrscht. Sie ist nicht gleich der Feldstärke im Laborsystem sondern transformiert sich aus E und B im Laborsystem über E0 = E + v × B . Das Induktionsgesetz in der Form (2.29) ist somit immer dann gültig, wenn sich F (t) und S(t) gar nicht oder nur langsam und gleichförmig (nicht beschleunigt) ändern. Bei beschleunigten Bewegungen ist obige Form im allgemeinen nicht gültig. 38 2. Maxwellsche Gleichungen im Vakuum 2.8 Verschiebungstrom. Maxwells Gleichung Sehr bald wurde von James Clerk Maxwell (1831-1879) ein Widerspruch im Durchflutungssatz (2.22), (2.23) festgestellt. Betrachtet man z.B. eine Leitung mit einem Kondensator, Abb. 2.5, so ergibt sich, abhängig von der gewählten Fläche, ein Strom Z I J · dF = µ0 I B · ds = µ0 F1 S oder kein Strom I Z B · ds = µ0 S F2 J · dF = 0 , d.h. man müßte die Fläche spezifizieren, was natürlich nicht vereinbar ist mit einem Gesetz. J (t) F1 PSfrag replacements F2 E(t) Abb. 2.5. Anwendung des Durchflutungssatzes Maxwell hat daraufhin die Verschiebungstromdichte ∂ (ε0 E) (2.31) ∂t eingeführt und den Durchflutungssatz erweitert (Maxwells Gleichung) Z I Z d J · dF + µ0 B · ds = µ0 ε0 E · dF . (2.32) dt F F S J vs = In obiger Form ist der Durchflutungssatz nur bei zeitlich konstanten Flächen F mit konstanten Rändern S gültig. Sind F und S nicht konstant, müßte er, ähnlich dem Induktionsgesetz (2.29), modifiziert werden. Da dies aber ohne große technische Bedeutung ist, wird hier darauf verzichtet. 2.9 Maxwellsche Gleichungen Die Gleichungen (2.32), (2.29), (2.18) und (2.28) bilden die vier Maxwellschen Gleichungen in Integralform 2.9 Maxwellsche Gleichungen (I) (II) (III) (IV) d B · ds = µ0 J · dF + µ0 dt F Z IS d 0 B · dF E · ds = − dt F IS Z ε0 E · dO = qV dV O V I B · dO = 0 I Z Z F 39 ε0 E · dF . (2.33) O Die Integralform ist gut geeignet für die physikalische Interpretation. Andererseits ist eine solche globale Verknüpfung meistens ungeeignet zur Berechnung der Felder. Besser sind Beziehungen, die die Felder und Quellen lokal in einem Punkt des Raumes in Verbindung setzen, wie die Differentialform. Zur Überführung der Maxwellschen Gleichungen I und II in Differentialform wendet man den Stokesschen Satz auf die linke Seite an Z Z Z d µ0 ε0 E · dF µ0 J · dF + (∇ × B) · dF = dt F F F Z Z d (∇ × E) · dF = − B · dF dt F F und nimmt die Integrationsfläche als zeitlich konstant an, sowohl in Form wie in Position. Dann wird aus der Differentiation nach der Zeit eine partielle Differentiation und außerdem kann man die Integration mit der Differentiation vertauschen ¸ Z · ∂ ∇ × B − µ0 J − µ0 ε0 E · dF = 0 ∂t F ¸ Z · ∂B · dF = 0 . ∇×E+ ∂t F (Wie die Umformung bei nicht konstanten Flächen geht, wird in §12.1 anhand des Induktionsgesetzes vorgeführt.) Da die Beziehungen für jede Fläche gelten, kann man auch eine kleine Fläche wählen F = ∆F und den Grenzübergang ∆F → 0 durchführen. Dies ergibt die Differentialform (I) (II) ∇ × B = µ 0 J + µ0 ∇×E =− ∂B ∂t ∂ (ε0 E) ∂t . (2.34) In analoger Weise überführt man die dritte und vierte Maxwellsche Gleichung mit Hilfe des Gaußschen Integralsatzes und des Grenzüberganges ∆V → 0 (III) ∇ · (ε0 E) = qV (IV) ∇·B =0 . (2.34) 40 2. Maxwellsche Gleichungen im Vakuum Die Maxwellschen Gleichungen in Differentialform, (2.34), sind allgemein gültig, auch wenn sich der Beobachter in einem bewegten Referenzsystem befindet und dort seine Experimente durchführt. Die Gleichungen sind linear und es gilt das Superpositionsprinzip. An dieser Stelle sei nochmals auf die von Maxwell eingeführte Verschiebungstromdichte eingegangen. Nimmt man die Divergenz von (2.34 I) ¶ µ ∂ε0 E , ∇ · (∇ × B) = 0 = µ0 ∇ · J + µ0 ∇ · ∂t vertauscht die räumliche Differentiation mit der zeitlichen und verwendet (2.34 III), so erhält man die Kontinuitätsgleichung ∇·J =− ∂qV . ∂t (2.35) In Integralform, nach Anwendung des Gaußschen Integralsatzes, lautet sie I Z ∂ ∂Q . (2.36) J · dO = − qV dV = − ∂t V ∂t O Sie besagt, daß der aus einem Volumen herausfließende Strom mit der zeitlichen Abnahme der Ladung im Volumen einhergehen muß. Dies ist der Ladungserhaltungssatz. Ladungen können weder erzeugt noch vernichtet werden. Man sieht also, daß der Verschiebungstrom nötig ist, um die Erhaltung der Ladung zu garantieren. An dieser Stelle sind einige Bemerkungen zu den Maxwellschen Gleichungen nötig: Zunächst einmal stellt man fest, daß alle auftretenden Größen stetig und kontinuierlich sind. Dies ist auch der Fall, wenn die Gleichungen in Materie gegeben sind, wie wir später sehen werden. Unstetige Feldgrößen oder unstetige Ableitungen von Feldgrößen treten lediglich bei abrupten Übergängen zwischen Gebieten mit verschiedenen Materialien auf. An solchen Übergängen sind die Maxwellschen Gleichungen nicht gültig und die Feldlösungen auf beiden Seiten des Übergangs müssen mit einem speziellen Verfahren angepaßt werden. Auch die in den Gleichungen auftretenden Strom- und Ladungsverteilungen sind stetig. Andererseits ist es für die Behandlung von Problemen oftmals nützlich, unstetige Verteilungen wie Punkt-, Linien- und Flächenladung oder Linien- und Flächenströme anzunehmen (siehe §2.2). Auch diese Fälle müssen besonders behandelt werden, indem die Gebiete mit den unstetigen Verteilungen zunächst aus dem Gebiet der Felder ausgeschlossen werden und anschließend die Größe der Felder durch einen Grenzübergang bestimmt wird. Häufig werden lediglich die beiden ersten Gleichungen, (2.33 I,II) oder (2.34 I,II), als die Maxwellschen Gleichungen bezeichnet; denn die beiden Divergenzgleichungen (2.34 III,IV) stellen zusätzliche Bedingungen dar, welche aus den beiden ersten Gleichungen abgeleitet werden können. Nimmt man die Divergenz von (2.34 I,II) 2.10 Einteilung elektromagnetischer Felder ∇ · (∇ × B) = 0 = µ0 ∇ · J + µ0 ∇ · ∇ · (∇ × E) = 0 = −∇ · µ ∂B ∂t ¶ µ ∂ ε0 E ∂t ¶ 41 , , so folgt nämlich nach Vertauschen der räumlichen und zeitlichen Differentiation und unter Verwendung von (2.35) ∂ [∇ · (ε0 E) − qV ] = 0 ∂t , ∂ (∇ · B) = 0 , ∂t oder ∇ · (ε0 E) − qV = f (r) , ∇ · B = g(r) , wobei f und g zeitlich konstant sind. Wenn also irgendwann in der Vergangenheit die Felder und die Ladungen nicht vorhanden waren, so müssen f und g zu allen Zeiten verschwinden und es ergeben sich die Divergenzgleichungen (2.34 III,IV). Obwohl die Divergenzgleichungen aus den Rotationsgleichungen abgeleitet werden können, sind sie nötig, um die Eindeutigkeit der Feldlösung zu gewährleisten. Wir schließen sie daher in den Satz der vier Maxwellschen Gleichungen ein. 2.10 Einteilung elektromagnetischer Felder Es gibt viele Sonderfälle der Maxwellschen Gleichungen, wie z.B. zeitlich konstante Felder oder zeitlich langsam veränderliche Felder. Jeder Sonderfall erlaubt eine Vereinfachung der Gleichungen und es haben sich dafür spezielle Fachgebiete entwickelt. Zeitlich konstante Felder (∂/∂t = 0) setzen ruhende oder gleichförmig bewegte Ladungen voraus. Man teilt sie ein in 1) Elektrostatische Felder I I S O E · ds = 0 ε0 E · dO = Z qV dV V → ∇×E =0 → ∇ · (ε0 E) = qV (2.37) Es treten keine Ströme und kein Magnetfeld auf. Das elektrische Feld ist wirbelfrei. Seine Quellen sind Ladungen. 42 2. Maxwellsche Gleichungen im Vakuum 2) Magnetostatische Felder I I S B · ds = µ0 O B · dO = 0 Z F J · dF → ∇ × B = µ0 J → ∇·B =0 (2.38) Es sind konstante Ströme möglich. Eventuell auftretende elektrische Felder werden nicht betrachtet. Die magnetische Induktion ist quellenfrei und hat Wirbel an Stellen, an denen Ströme auftreten. 3) Stationäres Strömungsfeld I I S E · ds = 0 → ∇×E =0 O J · dO = 0 → ∇·J =0 (2.39) Das elektrische Feld und die zeitlich konstante Stromdichte sind über das Ohmsche Gesetz (§7.2) verbunden J = κE . (2.40) Die bei jedem Stromfluß auftretenden Magnetfelder werden hierbei nicht betrachtet. Das Strömungsfeld ist wirbel- und quellenfrei. Neben den statischen Feldern werden oft quasistationäre Felder benutzt, die sich dadurch auszeichnen, daß zwar zeitliche Änderungen vorhanden sind, die aber so langsam vor sich gehen, daß Momentanaufnahmen der Felder den statischen Feldern entsprechen. Ladungsbewegungen folgen den Feldänderungen verzögerungsfrei“ , Abstrahlung findet nicht statt. Orts- und Zeitabhängig” keit sind entkoppelt und die Berechnung der Felder geschieht mit den Methoden für statische Felder. Nimmt die Geschwindigkeit der zeitlichen Änderung zu, müssen die zeitlichen Ableitungen berücksichtigt werden. Man unterscheidet den Fall ∂B ∂ (ε0 E) 6= 0 , =0 ∂t ∂t für zeitlich veränderliche elektrische Felder, der allerdings keine große Rolle spielt und hier nicht weiter betrachtet wird, und den Fall ∂ ∂B (ε0 E) = 0 , 6= 0 . ∂t ∂t Dieser Fall wird hier bezeichnet mit 2.10 Einteilung elektromagnetischer Felder 43 4) zeitlich langsam veränderliche Felder I S B · ds = µ0 Z F J · dF d B · dF dt F S Z I qV dV ε0 E · dO = V O I B · dO = 0 I E · ds = − Z O → ∇ × B = µ0 J → ∇×E =− → ∇ · (ε0 E) = qV → ∇·B =0 ∂B ∂t (2.41) Die Felder sind noch an die Quellen gebunden, eine freie Ausbreitung im Raum (Wellen) ist nicht möglich. Dieser Fall gilt auch bei schnell veränderlichen Feldern in metallischen Leitern, da der Verschiebungstrom dann sehr viel kleiner als der Leitungsstrom ist und vernachlässigt werden kann. Das Magnetfeld induziert allerdings ein elektrisches Feld, was zu einer Stromverdrängung führt. Die Gleichungen erlauben die Behandlung aller üblichen Induktionsvorgänge wie z.B. bei Elektromotoren, Generatoren u.s.w.. Schließlich verbleiben noch die 5) zeitlich beliebig veränderlichen Felder Ihre Behandlung erfordert die vollständigen Maxwellschen Gleichungen (2.33) oder (2.34). Elektrische und magnetische Felder sind auf symmetrische Weise miteinander verkoppelt und können sich als Wellen frei ausbreiten.