Lösungen zum 3. Übungsblatt Funktionentheorie I - KIT
Werbung

Universität Karlsruhe
Mathematisches Institut I
Prof. Dr. M. von Renteln
Dr. C. Kaiser
SS 2005
Lösungen zum 3. Übungsblatt Funktionentheorie I
Aufgabe 3.1 K
a) Als Möbiustransformation hat S definitionsgemäß die Gestalt
S(z) =
az + b
cz + d
mit gewissen Konstanten a, b, c, d ∈ C (wobei ad − bc 6= 0). Damit S(2) = 0 gilt, muss
somit 2a + b = 0 sein, d. h. b = −2a. Die Forderung S(i) = ∞ bedeutet ic + d = 0, also
d = −ic. Wir wissen nun, dass S folgendermaßen aussieht:
S(z) =
az − 2a
a z−2
= ·
.
cz − ic
c z−i
Wegen ad − bc 6= 0, also −iac + 2ac 6= 0, gilt dabei c 6= 0. Setzen wir nun k := a/c, so
folgt S(0) = 2k/i = −2ik, und damit dies = −2 ist, müssen wir k = 1/i wählen. Die
ersten drei Bedingungen sind somit genau dann erfüllt, wenn
S(z) =
1 z−2
z−2
·
=
.
i z−i
iz + 1
Hieraus ergibt sich S(∞) = 1/i = −i, d. h. die vierte Bedingung ist ebenfalls erfüllt. Die
fragliche Möbiustransformation existiert also.
Um die Umkehrabbildung S −1 zu bestimmen, lösen wir die Gleichung w = S(z) nach z
auf:
w=
z−2
w+2
⇐⇒ w(iz + 1) = z − 2 ⇐⇒ w + 2 = z(1 − iw) ⇐⇒
=z
iz + 1
1 − iw
Die Möbiustransformation S −1 ist somit gegeben durch
S −1 (z) =
z+2
.
−iz + 1
(Dies hätten wir auch direkt mit Hilfe der aus der Vorlesung bekannten Formel für S −1
hinschreiben können.)
Jetzt bestimmen wir die Fixpunkte von S. Es gilt
z−2
= z ⇐⇒ z − 2 = iz 2 + z ⇐⇒ iz 2 = −2
iz + 1
√
⇐⇒ z 2 = 2i ⇐⇒ z 2 = 2eiπ/2 ⇐⇒ z = ± 2 eiπ/4 ⇐⇒ z = ±(1 + i) ,
S(z) = z ⇐⇒
d. h. die Möbiustransformation S hat die zwei Fixpunkte z1,2 = ±(1 + i).
Nun fehlt nur noch die Darstellung von S als Produkt von Elementartypen. Wir schreiben
Tb für die Verschiebung um b ∈ C, Da für die Drehstreckung mit Faktor a ∈ C und I für
die Inversion, also
1
Tb (z) = z − b,
Da (z) = a · z,
I(z) = .
z
Dann gilt
z−2
i−2
=
− i = (Ti ◦ Di−2 ◦ I ◦ T−1 ◦ Di )(z).
S(z) =
iz + 1
iz + 1
b) Genau wie eben folgt aus T (0) = ∞ und T (3i) = 0, dass T von der Bauart
z − 3i
T (z) = k
z
(mit einem gewissen k ∈ C) sein muss. Man erhält T (i) = −2k; damit dies = 1 ist, muss
k = − 12 gelten. Dann ist aber T (1) = − 21 (1 − 3i) 6= i, und damit ist die erste Forderung
nicht erfüllt. Es gibt somit keine derartige Möbiustransformation.
Aufgabe 3.2
a) Da S als Möbiustransformation kreistreu ist, werden die Einheitskreislinie und die
beiden Achsen durch S auf verallgemeinerte Kreise abgebildet. Es gilt
S(1) = 21 (i − 1) ,
S(i) = 0 ,
S(−1) = ∞ ,
S(0) = i ,
S(∞) = −1 .
Die drei auf ∂D liegenden Punkte 1, i und −1 werden also durch S abgebildet auf die
Punkte 12 (i − 1), 0 und ∞. Durch diese drei Bildpunkte geht genau ein verallgemeinerter
Kreis, nämlich die Gerade durch die Punkte 12 (i − 1) und 0. Diese Gerade, die durch die
Gleichung Im z = − Re z dargestellt wird, ist mithin das Bild von ∂D.
Jetzt zur reellen Achse: Da die auf ihr liegenden Punkte 1, −1 und 0 auf 12 (i − 1), ∞ und
i abgebildet werden, ist ihr Bild der verallgemeinerte Kreis durch diese Punkte, also die
Gerade durch 12 (i − 1) und i. Diese wird dargestellt durch Im z = 1 + Re z.
Auf der imaginären Achse liegen die drei Punkte i, 0 und ∞. Deren Bilder, also die Punkte
0, i und −1, legen wieder einen verallgemeinerten Kreis√fest: Das Bild der imaginären
Achse ist der Kreis um den Punkt 21 (i − 1) mit Radius 12 2.
6Im
@
@
6Im
ri
@r
@r
@
r
-
1
Re
@
@
¡
¡
r¡
¡
6Im
............
........ ..........r..
....
...i
....
...
r
....
..
...
..
.
....r
.
.
.
r
.......
.
.......................
r
-
1
Re
r¡
¡
i
r
-
1
Re
b) Da S(∂D) eine Gerade durch den Nullpunkt ist, gilt für die durch S1 (z) := 2z gegebene
Möbiustransformation: S1 (S(∂D)) = S(∂D). Damit wird das Gewünschte beispielsweise
durch die Möbiustransformation T := S1 ◦ S geleistet, also durch
T (z) = 2S(z) =
2i − 2z
.
1+z
Eine andere Möglichkeit die Forderung zu erfüllen wäre T (z) := S(−z), also
T (z) =
i+z
,
1−z
denn für die Möbiustransformation S2 (z) := −z gilt: S2 (∂D) = ∂D.
Aufgabe 3.3 K
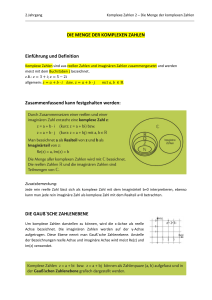
Der Kreisring G lässt sich darstellen in der Form G = G1 ∩ G2 , wobei
b : |z| > 1 }
G1 := { z ∈ C
und
b : |z| < 2 } .
G2 := { z ∈ C
Wir bestimmen zuerst S(G1 ). Der Rand ∂G1 von G1 ist die Einheitskreislinie; wegen der
Kreistreue der Möbiustransformation S folgt, dass S(∂G1 ) ein verallgemeinerter Kreis
ist. Um S(∂G1 ) zu bestimmen, reicht es daher, drei Punkte abzubilden: Wegen
1
S(−1) = − ,
2
S(i) =
i
1+i
i−1
·
=
,
1−i 1+i
2
S(1) = ∞
ist S(∂G1 ) die Gerade Re w = − 12 . Da S zudem orientierungstreu ist und G1 bezüglich
der Orientierung (−1, i, 1) links von ∂G1 liegt, muss S(G1 ) bezüglich (S(−1), S(i), S(1))
links von S(∂G1 ) liegen, d. h. es gilt S(G1 ) = { w ∈ C : Re w < − 12 }.
b := R ∪ {∞} in den beiden
Nun zu G2 . Der Rand von G2 schneidet die reelle Achse R
b) ⊂ R
b und da S(R
b ) ein verallgemeinerter
Punkten −2 und 2 senkrecht. Offenbar ist S(R
b) = R
b gelten. Da S winkeltreu ist, schneidet S(∂G2 ) die reelle Achse
Kreis ist, muss S(R
in S(−2) = −2/3 und S(2) = −2 senkrecht. Folglich ist S(∂G2 ) der Kreis um −4/3 mit
Radius 2/3, und S(G2 ) ist dann entweder das Innere oder das Äußere dieses Kreises. Da
b : |w + 4 | > 2 }.
0 ∈ G2 gilt, und S(0) = 0 im Äußeren liegt, ist S(G2 ) = { w ∈ C
3
3
Weil S injektiv ist, folgt S(G) = S(G1 ) ∩ S(G2 ) = { w ∈ C : Re w < − 12 , |w + 34 | >
2
3
}.
(Man könnte auch die Ränder ∂G1 und ∂G2 von G abbilden und dann argumentieren,
dass S(G) aus Stetigkeitsgründen die Menge zwischen S(∂G1 ) und S(∂G2 ) sein muss.)
Im
Im
6
6
.....................................
.........
..............
.......
.........
......
.......
.....
....
.
.
.
....
...
.
.
....
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...
.
.
.
.
.
........
........
..
.
...
.
.
.
.
.
.
....
...
...
....
....
.
...
..
...
....
..
...
..
...
...
..
..
..
.
..
...
..
.
..
.
..
.
...
..
.
..
.
.
.
.
...
...
.
.
.
.
.
.
.
.
.
...
.....
..........
.....
...
...
............................
....
...
....
....
.....
....
.
.
.
.
......
.
........
......
...........
........
...................................................
qi
q
1
.
........
-
Re
S
−−−−−→
........................
.......
....
....
...
...
..
...
..
...
..
...
..
.
.....
.
.
...........................
.
........
qi
q -
1 Re
Aufgabe 3.4
Sei S eine Möbiustransformation und H = {z ∈ C : Im z > 0}.
Behauptung: S(H) = H ⇐⇒ S(z) =
az+b
cz+d
mit a, b, c, d ∈ R und ad − bc > 0.
b→C
b stetig
Beweis: (⇒) Sei S eine Möbiustransformation mit S(H) = H. Da S, S −1 : C
b
sind, ist S(∂H) = ∂H = R. Also existieren paarweise verschiedene reelle Zahlen z1 , z2 , z3 ,
so dass ihre Bilder w1 = S(z1 ), w2 = S(z2 ), w3 = S(z3 ) ebenfalls in R liegen. Die Invarianz
b , dass (z, z1 , z2 , z3 ) = (S(z), w1 , w2 , w3 ) gilt,
des Doppelverhältnisses liefert nun für z ∈ C
d.h.
(z − z2 )(z1 − z3 )
(S(z) − w2 )(w1 − w3 )
=
.
(z − z3 )(z1 − z2 )
(S(z) − w3 )(w1 − w2 )
Da wi , zi ∈ R sind (i = 1, 2, 3), existieren Zahlen a, b, c, d ∈ R mit S(z) =
az+b
cz+d .
Es bleibt zu zeigen, dass ad − bc > 0 gilt. Hierzu berechnen wir S(i):
S(i) =
ai + b
(ac + bd) + i(ad − bc)
=
.
ci + d
c2 + d 2
Es gilt also S(i) ∈ H genau dann, wenn ad − bc > 0.
b
b
(⇐) Ist S(z) = az+b
cz+d mit a, b, c, d ∈ R und ad − bc > 0, dann ist zunächst S(R) ⊆ R. Die
−1
b) = R
b . Da S, S : C
b →C
b stetig sind
Kreistreue der Möbiustransformation liefert S(R
und S(i) ∈ H liegt nach obiger Beobachtung, ist S(H) = H.
¤