Optische Systeme - KIT
Werbung

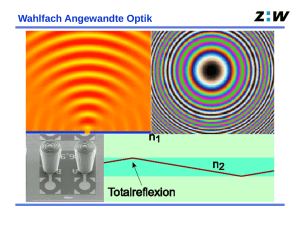
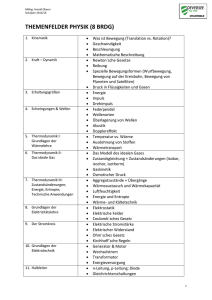
9.2 Inhalte der Vorlesung 1. Grundlagen der Wellenoptik 2. Abbildende optische Systeme 3. Optische Messtechnik 3.1 Spektroskopie 3.2 Materialcharakterisierung 3.3 Entfernungsmessung 3.4 Winkelmessung 3.5 Optische Maus 4. Optische Materialbearbeitung 5. Optik in der Datenspeicherung 6. Mikro- und Nanooptische Systeme Optische Systeme Martina Gerken 17.12.2007 Universität Karlsruhe (TH) 9.3 9.4 Methoden der Entfernungsmessung Entfernungsmessung über Triangulation • • Basisentfernungsmesser – Kathete (Basis) vorgegeben – Winkel β verändert bis sich Hypotenuse und Ankathete im Objekt treffen. • Winkelentfernungsmesser – Winkel β vorgegeben – Länge der Kathete verändert, bis sich Hypotenuse und Ankathete im Objekt treffen. Optische Methoden – optische Triangulation – optische Laufzeitmessung – optische Interferometrie Quelle: http:// de.wikipedia.org/wiki/Entfernungsmessung Quelle: http://www.epsonrd1.de 9.5 9.6 Visuelle Darstellung Beispiele für Indikatorbilder • • Mischbild – Fokussiert, wenn Bild und Geisterbild deckungsgleich • Schnittbild – Fokussiert, wenn Bildhälften ohne Versatz • Kehrbild – Fokussiert, wenn Kehrbild ohne Versatz Mischbildindikator Quelle: Naumann/Schröder, Bauelemente der Optik, 1992 • Schnittbildindikator Quelle: http://www.epsonrd1.de 9.7 9.8 Beispiel: Mischbild-Entfernungsmesser • Winkeländerung über Prismendrehung erreicht – Hebelübersetzung zur genaueren Winkelbestimmung Quelle: Schröder, Technische Optik, 1990 Veränderliche Strahlablenkung • • • “Optische Übersetzung” mit Prismenkeilen erzeugt bei großer Schwenkung bwz. Drehung nur kleine Strahlwinkeländerung Planplattenmikrometer Drehen/Verschieben von Planlinsenpaar • Drehkeilpaar Quelle: Schröder, Technische Optik, 1990; Naumann/Schröder, Bauelemente der Optik, 1992 9.9 9.10 Beispiel: Kehrbild-Entfernungsmesser • • Beispiele: Abstandssensor Winkeländerung über Linsenversatz Bildtrennung durch Prismensystem Kontrolle der Rotationsachse eines Körpers Kontrolle von Unwuchten eines Körpers Quelle: Schröder, Technische Optik, 1990 9.11 9.12 Beispiele: Abstandssensor Messung der Schichtdicke Lichtschnitt-Sensor • • Laserlinie in definiertem Winkel über Tastobjekt gelegt Laserlinie wird auf Empfänger-Kamera als Kontur abgebildet, die dem Höhenprofil entspricht Essentiell für Automatisierung Quelle: http:// www.machinevisiononline.org; http://www.sick.de 9.13 9.14 Farbcodierte Triangulation • Laufzeit-Entfernungsmesser Pressemeldung 01/2007: Mit Hilfe eines farbcodierten TriangulationsVerfahrens lassen sich dreidimensionale Abbilder von teilweise sogar bewegten Objekten aller Art erfassen. – 3D-Machine Vision erweitert von Siemens – Projektor beleuchtet Objekt mit parallelen Lichtstreifen – Kamera zeichnet Muster auf, das eine Art Höhenprofil ergibt – Computerprogramm berechnet im Bruchteil einer Sekunde das 3D-Abbild – Lichtstreifen sind farblich oder zeitlich redundant codiert – Je nach Kodierung wird 3D-Datensatz aus einem Videobild bestimmt und somit auch bewegtes Objekt dreidimensional erfasst. • • • • Aussenden eines Laserpulses und Bestimmung der Zeitdifferenz bis zum Empfang des Reflexionspulses Berechnung der Strecke aus Ausbreitungsgeschwindigkeit Problem: Licht ist schnell – Laufzeit für eine Stecke von 1 m ist 3 ns Kurze Laserpulse und schnelle Elektronik notwendig Quelle: http:// www.pro-physik.de; http://www.siemens.de 9.15 9.16 LIDAR (Light Detection and Ranging) • Vgl. Radar: Gruppenarbeit • Ihre Firma möchte einen elektronischen Entfernungsmesser ins Produktprogramm aufnehmen und Ihr Team soll einen ersten Vorschlag erarbeiten • Entwickeln Sie im Team je einen Vorschlag für einen Triangulations- und einen Laufzeit-Entfernungsmesser. – Erstellen Sie ein Schema des Aufbaus! – Spezifizieren Sie die Komponenten! – Nennen Sie den Messbereich! – Schätzen Sie die Messgenauigkeit ab! • Diskutieren Sie, welcher Ihrer Vorschläge vielversprechender ist und stellen Sie diesen mit Hilfe einer Overhead-Folie dem Management vor! – Elektromagnetische Welle wird abgestrahlt und das reflektierte Signal detektiert und analysiert. Quelle: http:// www.dlr.de/schoollab/ 9.17 9.18 LIDAR Anwendungsbeispiele • Koordinatenbestimmung durch Laufzeitmessung • Chemische Analyse (Schadstoffgehalt in der Atmosphäre) durch Laufzeitmessung und spektrale Messung (von Raman-Streuung) • Dynamik von Gasströmungen durch Laufzeitmessungen und Dopplerverschiebung LIDAR-Systeme (Beispiel Uni Baltimore) Laser Q-switched Nd-YAG with 320mJ at 1064nm (additional wavelengths: 532nm and 355nm); 30Hz repetition rate; 8ns pulse; 1.8 mrad beam divergence; BigSky laser model CFR 400 Telescope 25.4 cm (10 in) diameter, Cassegrain f/10, 5mrad FOV (Meade LX50) Detector IR-enhanced Si avalanche photodiode (Analog Modules) Digitizer 12-bit 100MHz, dual channel (Signatec PDA 12) Scanning system Azimuth rotary stage (180:1), stepper motors & encoders, elevation right angle reducer (100:1), i.e. from 90o to -10o, AT6400 controller (Compumotor) Maximum range resolution 1.5m Data acquisition Pentium 133 MHz laptop 9.19 9.20 Interferometrische Entfernungsmessung • • • • Interferometer – Lichtstrahl wird in mindestens zwei Lichtbündel aufgeteilt – Lichtbündel durchlaufen unterschiedliche optische Wege – Lichtbündel werden am Ausgang wieder zusammengeführt Bei kohärenter Überlagerung Interferenzmuster (Interferenzstreifen oder ringe) beobachtbar – Muster wird durch Differenz der optischen Wege bestimmt, die die einzelnen Strahlen bis zur Vereinigung zurückgelegt haben. Präzisionsmessungen über Auswertung von optischen Interferenzen Beispiele für Interferometer Fabry-Perot Michelson Einschub: Newtonsche Ringe • Newtonsche Ringe durch Interferenz von Reflexion an Linse und Reflexion an Glasplatte Mach-Zehnder Ohne Fehler Quelle: Naumann/Schröder, Bauelemente der Optik, 1992 Mit Fehler Quelle: wwwex.physik.uni-ulm.de 9.21 9.22 Weißlichtinterferometrie • • Fokussierentfernungsmesser Interferenz breitbandigen Lichts (Weißlicht) ausgenutzt – Breitbandiges Licht hat kurze Kohärenzlänge – Interferenzphänomene nur sichtbar, wenn die Weglänge in beiden Armen des Interferometers bis auf die Kohärenzlänge (~λ) gleich – Messkopf wird in z-Richtung verfahren und Objekt abgescannt „Tiefenbild“ des Objektes mit einer sehr geringen Messunsicherheit generiert – Aufbau muss sehr stabil sein Quelle: www.3d-shape.com • • • • Veränderung von Objektiv-Okular-Abstand bis Abbildung fokussiert Ablesen der Entfernung an Objektivskala Auch Kontrastmessung genannt, da Bildkontrast im Fokus maximal Autofokus einer Digitalkamera funktioniert über Kontrastmessung – Prozessor der Kamera errechnet Frequenzverteilung im Bild – Je größer der Anteil der hohen Frequenzen, desto schärfer das Bild – Mehrere Aufnahmen mit unterschiedlicher Fokussierung notwendig, um eine Verbesserung oder Verschlechterung der Bildschärfe und die Richtung der nötigen Fokussierung zu ermitteln. Quelle: Naumann/Schröder, Bauelemente der Optik, 1992 9.23 Autofokus durch astigmatische Abbildung • • • Beleuchtungsfleck A wird durch Objektiv und Zylinderlinse astigmatisch auf Quadrantendiode abgebildet Bei richtiger Fokussierung (Soll-Abstand) sind Signale der beiden x-Dioden und der beiden y-Dioden identisch Fokus-Nachführung ergibt sich aus Differenzsignal – Verwendung in CD- und DVD-Spielern Quelle: Naumann/Schröder, Bauelemente der Optik, 1992 9.24 Inhalte der Vorlesung 1. Grundlagen der Wellenoptik 2. Abbildende optische Systeme 3. Optische Messtechnik 3.1 Spektroskopie 3.2 Materialcharakterisierung 3.3 Entfernungsmessung 3.4 Winkelmessung 3.5 Optische Maus 4. Optische Materialbearbeitung 5. Optik in der Datenspeicherung 6. Mikro- und Nanooptische Systeme 9.25 9.26 Winkelbestimmung über Kollimator und Fernrohr • • • • Autokollimationsfernrohr Kollimator: Projektor, der Strichplatte mit beleuchteter Marke nach Unendlich abbildet Fernrohr mit Marke zur Auswertung benutzt Richtungsdifferenzen werden empfindlich angezeigt Messanordnung ist unempfindlich gegen Fluchtungsdifferenzen (Parallelversetzung) • Kollimator und Fernrohr in einem Messgerät vereinigt – Okularstrichplatte (Fernrohrstrichplatte) und Kollimatorstrichplatte befinden sich in der Brennebene des Autokollimatorobjektives Quelle: Schröder, Technische Optik, 1990 Quelle: www.moeller-wedel-optical.com 9.27 9.28 Beispiel: Ermittlung des Profils einer Führungsbahn Quelle: Schröder, Technische Optik, 1990 Fluchtfernrohr • Präzisionsinstrumente zur Ausrichtung von Objekten entlang einer Fluchtlinie („Fluchtgeraden“) • Fluchtfernrohr fokussiert Zielmarken, um so deren laterale Abweichung in Bezug auf Referenzlinie zu bestimmen – Messanordnung gegenüber Drehung unempfindlich Quelle: Schröder, Technische Optik, 1990 9.29 9.30 Beispiel: Auswertung Fluchtbahnvermessung Ausrichten der Fernrohrachse Quelle: www.moeller-wedel-optical.com • Vor Verwendung muss Fernrohrachse meist parallel zu Führungsbahn etc. ausgerichtet werden – Vorgehen siehe Bild • Bei Benutzung eines Justierlasers identisches Vorgehen mit zwei Irisblenden Quelle: Schröder, Technische Optik, 1990 Quelle: Schröder, Technische Optik, 1990 9.31 9.32 Inhalte der Vorlesung 1. Grundlagen der Wellenoptik 2. Abbildende optische Systeme 3. Optische Messtechnik 3.1 Spektroskopie 3.2 Materialcharakterisierung 3.3 Entfernungsmessung 3.4 Winkelmessung 3.5 Optische Maus 4. Optische Materialbearbeitung 5. Optik in der Datenspeicherung 6. Mikro- und Nanooptische Systeme Opto-mechanische Maus (seit 1984) • Richtung erhält man aus zeitlicher Folge beider Signale 9.33 9.34 Optische Maus (alt – seit 1968) • Optische Maus (neu) Spezielles Muster auf dem Mauspad sorgt für eine modulierte Reflexion bei Verschiebung • Bild wird gescannt (wie in der Digitalkamera) und Verschiebungen errechnet Quelle: http://www.logitech.com/lang/pdf/laser_techbrief-04.pdf 9.35 9.36 Beispiele für optische Maus-Systeme • Gesamtaufnahme Lasermaus (sehr neu – seit November 2004) • • • Beleuchtung mit einem IR-Laser Bildaufnahme mit Kamera Speckle-Interpretation zur Bewegungsauswertung Quelle: http://www.mstarmetro.net/~rlowens/OpticalMouse/ • Beispielbild von unten Quelle: http://www.howstuffworks.com Quelle: http://www.logitech.com/lang/pdf/laser_techbrief-04.pdf 9.37 9.38 Was sind Speckle? • Erinnerung: Beugung am Gitter Speckle (Laserlicht-Granulationen) entstehen bei Reflexion bzw. Transmission von kohärentem Licht an rauen Oberflächen bzw. verteilten Streupartikeln • • Interferenzeffekt an einer sehr großen Zahl N von Streuzentren k, die feste Phasendifferenzen ϕk zwischen 0..2π erzeugen Jedes Streuzentrum ist Ausgangspunkt einer Kugelwelle, die sich im Beobachtungspunkt überlagern N Beobachtungspunkt r A( r ) = ∑ 9.39 9.40 Wie entstehen Speckle? • Speckle Interferenzeffekt an einer sehr großen Zahl N von Streuzentren k, die zufällige Phasendifferenzen ϕk zwischen 0..2π erzeugen Jedes Streuzentrum ist Ausgangspunkt einer Kugelwelle, die sich im Beobachtungspunkt überlagern N Beobachtungspunkt r A( r ) = ∑ k =1 ak eiϕk Beschaffenheit der Oberfläche Speckle treten auf, wenn die Rauheit der Oberfläche größer ist als die Wellenlänge Rauheit N Beobachtungspunkt r λ N kohärentes Licht λ • k =1 ak eiϕk kohärentes Licht λ kohärentes Licht 9.41 9.42 Speckle Probleme durch Speckles Beschaffenheit von Streupartikeln • Speckle treten in Transmission auf, wenn Streupartikel im Volumen verteilt sind im Abstand größer als die Wellenlänge • Rauheit Beobachtungspunkt r • • kohärentes Licht Hologramme: Neben der gewünschten Interferenz von Objekt- und Referenzwelle existieren Speckle durch raue Objekte Laserprojektionsdisplays: Rauheiten der streuenden Projektionsfläche sind Ursache von Speckles und geben ein unklares Bild Astronomie: Wellenfronten werden durch die Atmosphäre gestört und limitieren das Auflösungsvermögen (vgl. adaptive Optik) Funklöcher: Der Dozent mit Funkmikrofon ist je nach Position im Hörsaal nicht mehr zu hören (manchmal kein Problem) Möglicher Unterschied zu Streuung an der Oberfläche: Vielfachreflexion (random walk) macht effektive Rauheit größer als Dicke der Schicht 9.43 Chancen durch Speckles 9.44 Lasermaus Speckle Metrologie Direkter Rückschluss vom Speckle-Muster auf Oberflächenrauheit nicht möglich (vgl. Hologramme) Also: Vergleich von Referenz- und Messobjekt Überlagerung von Muster 1 und Muster 2 gibt ein Muster 3, das abhängig von der Phase (oder Wellenlänge) ist. Quelle: http://www.logitech.com/lang/pdf/laser_techbrief-04.pdf 9.45 9.46 Lasermaus (sehr neu – seit November 2004) • Andere Laser-Eigenschaften können ebenfalls benutzt werden – z.B. Philips Twin-Eye Laser Sensor: Eingabegerät basierend auf Laserdopplereffekt Fragensammlung • • • • • • • • • • • Quelle: http://www.business-sites.philips.com/lasersensors/about/article-15031.html Nennen Sie drei Methoden der optischen Entfernungsmessung! Skizzieren Sie ein Gerät zur visuellen Entfernungsmessung über Triangulation! Wie können kleine Winkeländerungen im Strahlengang erreicht werden? Für welche Distanzen sind Laufzeitentfernungsmessungen geeignet? Wie funktioniert die interferometrische Entfernungsmessung? Wie bestimmt eine Digitalkamera die Gegenstandsweite? Was ist ein Autokollimator? Wie funktioniert eine optische Maus? Was ist Speckle? Wann tritt Speckle auf? Wie funktioniert eine Lasermaus?