Document
Werbung

0 Vorbemerkungen
Alle Informationen zur Vorlesung sind unter www.physik.uni-luebeck.de unter dem Link Lehre abzurufen
Literatur zur Vorlesung:
Formelsammlung:
Inhalt der Vorlesung:
• Mechanik
• Mechanische Schwingungen und Wellen
• Wärmelehre
• Elektrizitätslehre
• Optik
• Atomphysik
Übungen: Mi, 15:00 - 18:00, H 1; Mo, 14:00 - 16:00, H 1; Mo, 16:00 - 18:00,
Seminarraum Informatik 4
Klausur: Wird noch bekannt gegeben, Zugangsvoraussetzung zum Praktikum
1
1.1
Einleitung
Warum Physik?
“Die Wahrheit ist, Bildung ist niemals umsonst”
Erste Wissenschaft im modernen Sinn, das heisst, Experiment als ultimativer
Test einer Hypothese. Heutzutage Standard in allen Naturwissenschaften.
Also: Von der Physik kann man wissenschaftliche Denkweise lernen.
1
Alle Prozesse unterliegen physikalischen Gesetzmässigkeiten, auch biologische
⇒Biophysik
Fast noch wichtiger: Alle Instrumente (Mikroskop, Fernglas, Thermometer,
Zentrifuge etc.) basieren auf physikalischen Prinzipien
1.2
Was ist Physik? Womit beschäftigt sie sich?
• Exakte Wissenschaft⇒Reproduzierbarkeit: Unter exakt gleichen Bedingungen muss das Experiment stets das gleiche Resultat zeigen. Das
ist in der Biologie nicht so einfach, da exakt gleiche Bedingungen nur
schwer herzustellen sind.
• Physik hat eine eigene Sprache⇒Physik verstehen ist ein bisschen wie
Sprache verstehen
• Einige wichtige Begriffe:
– Axiom, das; -s, -e <griech.> als absolut richtig anerkannter Grundsatz, feststehende Wahrheit, die keines Beweises bedarf
– Definition, die; -, -en <lat.> genaue Bestimmung eines Begriffes
durch Angabe der wesentlichen Merkmale
• Physik beschäftigt sich mit Prozessen und Zusammenhängen, oft mit
der Antwort von Systemen auf Veränderungen. Eine quantitative Beschreibung erfordert die Sprache der Mathematik
• Beispiel: Wir stellen einen Topf mit Wasser auf den Herd und schalten
diesen an.
– Qualitative Beschreibung: Das Wasser wird wärmer. Irgendwann
kocht es.
– Quantitative Beschreibung: Die Temperatur als Funktion der Zeit
T = f (t) z.B. T = c ∗ t, oder die Euros, die ich an die EVH zahlen
muss, als Funktion der Wassermenge, die ich zum Kochen bringe
Euros = f (mwasser )
2
• Anschauliche Darstellung funktionaler Zusammenhänge:
12
10
8
)x(f
6
4
2
0
0
20
40
60
80
100
120
x
• Da es oft um den Zusammenhang zwischen Veränderungen einer Grösse und einer anderen Grösse geht, spielen Differentialgleichungen eine
grosse Rolle in der Physik:
•
df (x)
dx
= g(x, ..)
• Die Physik versucht, die Ursachen für das Verhalten von Systemen zu
ergründen.
1.3
Der Messprozess
• Einer Messung in der Physik liegt stets eine klar formulierte Messvorschrift zugrunde. z.B. Zähle die Schwingungen eines Pendels zwischen
Loslassen eines Steines und Auftreffen auf dem Boden⇒Zeitmessung.
Das Beispiel zeigt auch sofort, was das Ergebnis einer solchen Messung
ist: Die Masszahl {t}(Zahl) und Einheit [t](Schwingungen des Pendels)
t = {t}[t]
• Offensichtlich muss die Einheit genau definiert werden
3
1.4
1.4.1
Physikalische Einheiten
Basiseinheiten
• Günstigerweise verwenden alle Wissenschaftler die gleichen Einheiten,
um die Reproduzierbarkeit zu vereinfachen
• Das Système International d’Unités (SI) ist das zu favorisierende Einheitensystem
• Was ist ein Einheitensystem?
– Alle Messungen in der Physik können auf einen Satz von Einheiten
zurückgeführt werden, die sogenannten Basiseinheiten
– Im SI sind folgende Basiseinheiten anhand einer Messvorschrift
festgelegt:
1.4.2
Abgeleitete Einheiten
• Physikalische Grössen, die durch einen funktionalen Zusammenhang
aus anderen Grössen entstehen, haben Einheiten, die durch den gleichen
4
funktionalen Zusammenhang beschrieben werden
• Beispiel: Geschwindigkeit v = s/t, [v] = [s]/[t] = m/s
• Einfache abgeleitete Einheiten werden (selten) durch den funktionalen
Zusammenhang der Basiseinheiten dargestellt, meist gibts eine neue
2
Einheit, z.b. für die Energie E:[E] = kg ms2 = J
• Beispiele für abgeleitete Einheiten
Mechanik
Elektrizitätslehre
Kraft
1 kg m s−2 = 1 Newton(N)
Spannung
1 kg m2 s−3 A−1 = 1 Volt(V)
Druck
1 kg m−1 s−2 = 1 Pascal(P)
Widerstand
1 kg m2 s−3 A−2 = 1 Ohm(Ω)
Energie
1 kg m2 s−2 = 1 Joule(J)
Kapazität
1 kg−1 m−2 s4 A2 = 1 Farad(F)
Leistung
1 kg m2 s−3 = 1 Watt(W)
Induktivität
1 kg m2 s−2 A−2 = 1 Henry(H)
• Was ist eine Dimension?
– Alle (Basis)-Einheiten, die ineinander durch Skalierung überführt
werden können, gehören zu einer Dimension, z.B. m/s und km/h,
beides sind Geschwindigkeitseinheiten, Skalierungsfaktor ist 3.6
– Eine Dimensionsanalyse kann oft hilfreich sein, um eine Formel zu
verstehen
1.4.3
Vorfaktoren
• Viele physikalische Grössen können über mehrere Grössenordnungen
(Zehnerpotenzen) variieren
• Zur Vereinfachung der Schreibung und vor allem der Aussprache werden Vorsilben verwendet:
atto(a)=10−18
femto(f)=10−15
5
pico(p)=10−12
nano(n)=10−9
micro(µ)=10−6
milli(m)=10−3
kilo(k)=103
mega(M)=106
giga(G)=109
tera(T) =1012
1.4.4
Messfehler
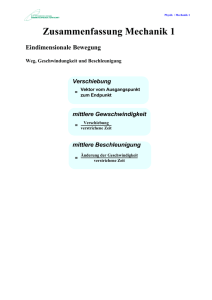
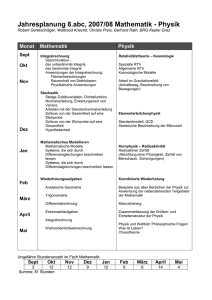
• Eine Messung einer physikalischen Grösse ist immer fehlerbehaftet!
Wird ein und dieselbe Grösse mehrmals gemessen und sind die Fehler rein statistischer Natur, so folgt die Häufigkeit der Messwerte einer
Gaussverteilung
3.06
3.04
3.02
trewsseM
3.00
2.98
2.96
0
200
400
600
Nummer der Messung
6
800
1000
30
25
20
tiekgifuH
15
10
5
0
2.94
2.96
2.98
3.00
3.02
3.04
3.06
Messwert
P
• Der Mittelwert einer Messung wird erhalten durch: < x >= n1 ni=1 xi
q
Pn
1
2
• Der Schätzwert für die Standardabweichung ist σ = n−1
i=1 (xi − < x >)
• Bedeutung: In einem Intervall x ± σ liegen 67% aller Messwerte, in
einem Intervall x ± 2σ 95%
• Als mittleren Fehler des Mittelwertes bezeichnet man die Grösse ∆x =
√σ
n
• Dies ist der in der Physik in der Regel angegebene Wert für den Fehler
der Messung
• Wie sieht es jetzt aus, wenn wir verschiedene Grössen Messen, aus
denen wir eine neue Grösse ausrechnen?
– z.B. Geschwindigkeit, wir messen Weg und Zeit, die jeweils einen
Fehler ∆s und ∆t haben
– wie gross ist der Fehler in der Geschwindigkeit
• Wir wollen hier nur den Grösstfehler behandeln, also den, der im ungünstigsten Fall auftritt
7
Summen- und Differenzregel
• Der absolute Fehler der Summe (Differenz) zweier Messgrössen ist gleich
der Summe der Absolutfehler der Einzelgrössen: ∆(a ± b) = ∆a + ∆b
Produkt- und Quotientenregel
• Der relative Fehler des direkten Produkts (Quotienten) zweier Messgrössen ist gleich der Summe der Relativ-Fehler der Einzelgrössen:
∆(a·÷b)
= ∆a
+ ∆b
a·÷b
a
b
– Beispiel Geschwindigkeit: Ich messe den Weg mit einem Fehler von
±0.1 und die Zeit mit einer Genauigkeit von ±0.2, dann ist der
relative Fehler der Geschwindigkeit ±0.3
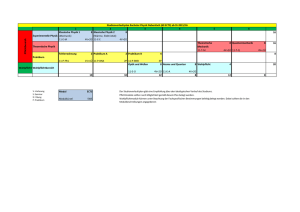
• Neben statistischen Fehlern können bei Messungen auch systematische
Fehler auftreten
• Das sind Fehler durch unkontrollierte Änderungen der Bedingungen,
unter denen das Experiment durchgeführt wird (z.B. Temperatur, Luftfeuchte ...)
• Dabei ist bei der Auftragung der Messwerte gegen die Nummer der
Messung eine Korrelation zu erkennen
8
3.8
3.6
3.4
trewsseM
3.2
3.0
2.8
2.6
0
200
400
600
800
1000
Nummer der Messung
1.5
Zentrale Konzepte in der Physik
• Physik basiert auf wenigen, fundamentalen Konzepten, aus denen sich
alle Zusammenhänge ableiten lassen
1.5.1
Wechselwirkungen (Kräfte)
• Allen physikalischen Prozessen liegen Wechselwirkungen (Kräfte) zugrunde
• Es gibt in der Natur vier Arten von Kräften: Die elektrische, die schwache, die starke, und die Gravitationskraft
• Die elektrische Kraft bestimmt im wesentlichen die Chemie und damit
auch die Biologie
1.5.2
Erhaltungsgrössen
• Die Erfahrung lehrt, dass gewisse physikalische Grössen bei bestimmten
Prozessen konstant bleiben:
9
• Gesamtenergie, Gesamtimpuls, Teilchenzahl...
2
Mechanik
2.1
Warum kommt die Mechanik zuerst?
• Die Gesetze der Mechanik sind durch die eigene Erfahrung die offenkundigsten
• Die Mechanik war das erste Teilgebiet der Physik (die damals noch
nicht so hiess), das auf eine wissenschaftliche Grundlage gestellt wurde
• Ursache dafür ist der Messprozess: Wege und Zeiten waren die ersten
physikalischen Grössen, die gemessen werden konnten
• Galileo Galilei 1564-1642 gilt als Begründer der Kinematik, er beobachtete die Bewegung von Körpern (vom Pendel (1602) bis zu der der
Planeten)
• Isaac Newton 1642-1727 fand die Ursache für die beschleunigte Bewegung, die Kraft, Geburtsstunde der Dynamik (1665, 1666)
2.2
Kinematik des Massenpunktes in einer Dimension
• Ein Massenpunkt ist eine der typischen Vereinfachungen in der Physik:
Er hat kein Volumen, also auch keine Orientierung, kann nicht rotieren,
seine Form nicht verändern etc.
• Wird benutzt, um die Bahn (Trajektorie) eines Körpers zu beschreiben
• Befasst sich mit der Zeitabhängigkeit der Lage von Körpern im Raum
10
2.2.1
Bezugssystem
• Unter einem Bezugssystem versteht man i.d.R. ein Koordinatensystem,
auf das sich die (zeitabhängige) Position eines Körpers bezieht
• In einer Dimension: Achse
• Beispiel dreidimensional: Das Bezugssystem des GPS sind Polarkoordinaten mit dem Erdmittelpunkt als Ursprung
2.2.2
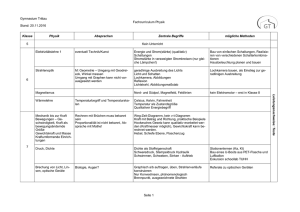
Geschwindigkeit
600
500
400
)m( geW
300
200
100
0
0
20
40
60
80
100
120
Zeit (s)
• Wir betrachten die Bewegung eines Schlittens auf der Luftkissenbahn
• Der zurückgelegte Weg ∆s ist die die Differenz zwischen End- und
Anfangsposition ∆s = x1 − x0
• Der Weg wächst linear mit der Zeit, in gleichen Zeitintervallen werden
gleiche Wege zurückgelegt
Luftkissenbahn
• Eine solche Bewegung nennt man gleichförmige Bewegung
• Man sagt auch: Weg und Zeit sind proportional ∆s ∝ ∆t
11
• Die Proportionalitätskonstante ist die Geschwindigkeit v: ∆s = v∆t
oder v := ∆s
∆t
• Richtung gibt Vorzeichen von ∆s an und damit auch von v
2.2.3
Momentangeschwindigkeit
600
500
400
)m( geW
300
200
100
0
0
20
40
60
80
100
120
Zeit (s)
• Wird in der Bestimmungsgleichung der Geschwindigkeit v := ∆s
der
∆t
Grenzübergang ∆t, ∆s → 0 gemacht, so erhält man die Momentangeschwindigkeit v := ds
dt
•
nennt man Differentialquotienten, die erste Ableitung des Weges
nach der Zeit ist also die Geschwindigkeit
ds
dt
• Graphisch: Anstieg der Tangente an die Weg-Zeit-Kurve
• Die Momentangeschwindigkeit ist, wie der Name schon sagt, eine Funktion der Zeit: v = v(t)
• Zeitliche Ableitungen werden oft durch einen Punkt über der Grösse
symbolisiert: v(t) := ds(t)
= ṡ(t)
dt
12
• Ist die Momentangeschwindigkeit zeitlich nicht konstant, spricht man
von einer ungleichförmigen Bewegung (keine Gerade im s − t - Diagramm)
• Der Quotient ∆s
ist in diesem Fall die Durchschnittsgeschwindigkeit v,
∆t
graphisch die Sehne durch zwei Punkte des s − t - Diagramms
2.2.4
Beschleunigung
• Die Beschleunigung a ist definiert als Änderung der Geschwindigkeit je
Zeiteinheit: a := ∆v
∆t
• Wieder können wir den Grenzübergang ∆t → 0 machen: a(t) =
dv(t)
dt
• Da wir für v(t) = ds
haben, können wir schreiben: a(t) = d(ds/dt)
, wofür
dt
dt
d2 s
man formal schreibt: a(t) = dt2 oder, die zeitliche Ableitung wiederum
durch einen Punkt symbolisierend: a(t) = v̇ = s̈(t)
2.2.5
Weg-Zeit-Gesetz bei der gleichmässig beschleunigten Bewegung
• Kann man aus der Funktion a(t) die Weg-Zeit-Funktion erhalten?
• Für den zurückgelegten Weg gilt: s = vt + s0
• Die Geschwindigkeit v ist jetzt aber nicht konstant, also müssen wir
1
den Mittelwert verwenden: v = v0 +v
2
• Für die Geschwindigkeit v1 gilt: v1 = v0 + at
• Daraus folgt: v = v0 + 12 at und demzufolge
1
s = at2 + v0 t + s0
2
• Oder durch doppelte Integration über die Zeit:
RR
• s(t) =
a(t)dtdt
13
Graphisch
• Dabei treten zwei Integrationskonstanten auf, nämlich s(t = 0) = s0
und v0 t (zu Hause mal nachrechnen)
• Für eine gleichförmig beschleunigte Bewegung (a(t) = const.) erhalten
wir:
• s(t) = s0 + v0 t + a2 t2
a 2
t + v0 t + s0
2
s
a 2
t
2 i
v0 t + s0
v0 t i
s0
ti
s
s0
Z
s=
tan α = v(ti )
ds
|t
=
dt i
α
vdt
s0
s0
t
ti
v
t
v
tan β = a(ti )
at + v0
Z
v=
ati
adt
v0
v0
ti
v0
dv
|t
dt i
2
d s
= 2 |ti
dt
=
β
v0
t
ti
a
t
a
a = konst
a
a
ti
a
a = konst
a
a
t
ti
a
t
• Beispiel für gleichmässig beschl. Bewegung: freier Fall
2.3
2.3.1
Kinematik im Raum
Superposition von Bewegungen
• Zum Beispiel gleichförmige Bewegung mit vx in x-Richtung, gleichmässig beschleunigte Bewegung mit −a in y-Richtung mit Anfangsgeschwindigkeit vy (0). Das Weg-Zeit Gesetz in beiden Richtungen lautet: x =
x0 + vx t sowie y = y0 + vy (0)t − a2 t2
14
• Das Superpositionsprinzip besagt nun, dass wir die Bewegungen in beiden Richtungen unabhängig voneinander betrachten können.
• Tragen wir x und y als Funktion von t in einem Diagramm auf, so
erhalten wir die Trajektorie des Massenpunktes
• Man spricht auch von der Parameterdarstellung einer Kurve, weil t
hier ein Parameter ist. Da die Zeit t für beide Zeitgesetze die gleiche
ist, können wir das Zeitgesetz für die Bewegung in x-Richtung nach t
umstellen und in das Zeitgesetz für die y-Richtung einsetzen:
•
y = y0 + vy (0)
x − x0 a (x − x0 )2
−
vx
2
vx2
• Dies ist die parameterfreie Darstellung der Bahnkurve, die offensichtlich
eine Parabel ist.
500
400
300
)m( y
200
100
0
0
200
400
600
800
1000
1200
x (m)
• Ein Beispiel für eine solche Bewegung ist der schiefe Wurf unter dem
Einfluss der Erdbeschleunigung
15
• Schon Galilei beobachtete, dass Körper, wenn losgelassen, eine beschleunigte Bewegung ausführen
Rechner,
M29a
2.3.2
Der Ortsvektor im Raum
Einschub: Vektoren sind gekennzeichnet durch ihren Betrag und ihre Richtung
im Raum.
Ax
~=
Komponenten eines Vektors: Projektionen auf die Koordinatenachsen A
Ay
Az
Es gilt das Superpositionsprinzip: Die Komponenten in den drei Raumrichtungen beeinflussen sich gegenseitig nicht. Vektoren können frei im Raum verschoben
werden.
Einheitsvektoren sind Vektoren des Betrages 1, sie zeigen also nur eine Richtung
an
Addition von Vektoren:
A
A-B A+B
B
Cx
Ax + Bx
In Komponenten: Cy = Ay + By
Cz
Az + Bz
Multiplikation mit einem Skalar (Zahl): Richtung bleibt gleich, Betrag wird mit
Skalar multipiziert
16
• Vektor von Referenzpunkt zu Massenpunkt: Ortsvektor ~r
• Ortsvektor
kann z.B. in kartesischen Koordinaten angegeben werden:
rx
~r = ry
rz
!
r
• oder in Polarkoordinaten (z.B. in zwei Dimensionen ~r =
)
ϕ
• Der von einem Massenpunkt zurückgelegte Weg ist ein Vektor: ∆~s =
~r2 − ~r1 , wofür man auch ∆~r schreiben kann
2.3.3
Geschwindigkeit im Raum
• Änderung des Ortes mit der Zeit: ∆~r = ~r(t0 + ∆t) − ~r(t0 )
• Da der Weg ein Vektor und da die Zeit ein Skalar ist, ist auch die
r
Geschwindigkeit eine vektorielle Grösse: ~v := ∆~
∆t
~v
• Ist die Richtung des Geschwindigkeitsvektors zeitlich konstant ∆ |v|
=
∆~ev = 0, spricht man von einer geradlinigen Bewegung, ansonsten von
einer krummlinigen Bewegung
• Zeitlich konstanter Betrag von ~v : gleichförmige Bewegung
• Sowohl Betrag als auch Richtung zeitlich konstant: gleichförmig geradlinige Bewegung
• Momentangeschwindigkeit: ~v (t) =
d~
r
dt
= ~r˙
• Richtung der Momentangeschwindigkeit: Tangente an die Bahnkurve
(wie wir am Beispiel der Kreisbewegung sehen werden)
17
2.3.4
Beschleunigung im Raum
• Beschleunigung wieder definiert als Änderung der Geschwindigkeit ∆~v =
v
~v (t0 + ∆t) − ~v (t0 ) mit der Zeit: ~a := ∆~
∆t
• offensichtlich ist sowohl eine Änderung der Richtung als auch des Betrages der Geschwindigkeit eine Beschleunigung ungleich null
• Eine krummlinige Bewegung ist also stets eine beschleunigte Bewegung
2.3.5
Kreisbewegung
• Warum ist die Kreisbewegung wichtig?
– Viele Bewegungen laufen unter dem Einfluss einer Kraft, die stets
auf einen Punkt gerichtet ist, ab, was häufig zu Kreisbewegungen
führt
• Die Kreisbewegung ist ein Speziallfall der krummlinigen Bewegung, bei
der sich die Richtung des Geschwindigkeitsvektors ändert
• Wenn sich der Ortsvektor eines Körpers nur in einer Ebene bewegt und
sein Betrag konstant ist, spricht man von einer Kreisbewegung
y
∆ϕ
∆s
18
x
• Ist zudem die Änderung des Winkels ∆ϕ proportional zur Zeit ∆t:
∆ϕ ∝ ∆t, so spricht man von einer gleichförmigen Kreisbewgung. Den
Proportionalitätsfaktor nennt man Winkelgeschwindigkeit oder auch
Kreisfrequenz und gibt ihm das Symbol ω, wobei der Winkel in rad
gemessen wird: ϕ = ωt
• Parameterdarstellung der Kreisbewegung:
• x = r cos ϕ = r cos ωt und y = r sin ϕ = r sin ωt
• Damit erhält man die Parameterdarstellung der Geschwindigkeit durch
Ableitung nach der Zeit
• vx = −ωr sin ωt = ωr cos(ωt + π/2) und vy = ωr cos ωt = ωr sin(ωt +
π/2)
• Der Geschwindigkeitsvektor steht senkrecht auf dem Ortsvektor
• In Vektordarstellung schreibt man dafür
• ~v = ω
~ × ~r
Einschub: Kreuzprodukt von Vektoren ~a × ~b
Ergebnis ist ein Vektor mit dem Betrag ab sin ^~a, ~b und einer Richtung, die
wie folgt festgelegt ist: Der Vektor des Kreuzprodukts steht senkrecht zu beiden
Ausgangsvektoren, und sein Vorzeichen ist durch die Rechte-Hand-Regel gegeben
• Entsprechend erhält man für die Beschleunigung
• ax = v̇x = −ω 2 r cos ωt und ay = v̇y = −ω 2 r sin ωt
• Oder, direkt durch Ableitung in Vektordarstellung:
• ~a =
d~v
dt
=
d
(~ω
dt
× ~r) = ω
~×
d~
r
dt
=ω
~ × ~v = ω
~ × (~ω × ~r) = −ω 2~r
19
• Der Beschleunigungsvektor steht senkrecht auf dem Geschwindigkeitsvektor und ist dem Ortsvektor entgegengesetzt gerichtet
• Man kann sich die Richtung der Beschleunigung bei der Kreisbewegung
auch anhand der Differenz ∆~v deutlich machen
v(t1)
∆v
v(t2) ∆v
∆v
v(t1)
v(t2) ∆v
• Ändert sich die Winkelgeschwindigkeit bei der Kreisbewegung, so kann
man eine Winkelbeschleunigung definieren:
M57
ω
~˙ =
d~
ω
dt
2.4
2.4.1
Dynamik des Massenpunktes
Die Newtonschen Axiome
• Bisher haben wir die Bewegung eines Körpers nur beschrieben
20