4 Punktmechanik
Werbung

4 Punktmechanik
Ist das Elektron ein Massenpunkt ?
4.1 Kinematik eines Massenpunktes
Kinematik:
geometrische Beschreibung der Bewegung
im dreidimensionalen Euklidischen Raum
Gegensatz zur Dynamik (Ursache der Bewegung, Kräfte)
Punktmechanik: Idealisierte Repräsentation des bewegten Objektes
durch einen Punkt
Gesamtmasse in einem Punkt konzentriert
kein Eigenvolumen, keine inneren Anregungen
Bahnkurve (Trajektorie) eines Massenpunktes
t1
Ortsvektor
r
r (t1 )
t2
Beschreibung der Bewegung
erfordert ein Bezugssystem
r
r (t2 )
Koordinatensystem
Ursprung und Basis
Ursprung
1
4.1 Koordinatensysteme
Zur Angabe eines Punktes im Raum sind 3 Größen erforderlich.
kartesische Koordinaten
Zylinderkoordinaten
P (ρ ,ϕ , z )
r r r
ex , e y , ez
bilden ein
Rechtssystem
x = ρ cosϕ
ρ = x2 + y2
y = ρ sin ϕ
ϕ = arctan
z=z
z=z
y
x
4.1 Kugelkoordinaten
x = r cosϕ sin ϑ
y = r sin ϕ sin ϑ
z = r cosϑ
r = x2 + y2 + z2
y
x
ϕ = arctan
x2 + y2 + z2
ϑ = arccos
z
2
4.1 Ortsvektoren und Trajektorien
r
()
Zeitabhängiger Ortsvektor r t
beschreibt Lage des Massenpunktes
willkürlich fixiertes Koordinatensystem
Bahnkurve in
kartesischen Koordinaten
x (t )
r
r
r
r
r (t ) = y (t ) = x (t ) ⋅ e x + y (t ) ⋅ e y + z (t ) ⋅ e z
z (t )
r
l = r (t ) = x 2 + y 2 + z 2
4.1 Vektorrechnung
Multiplikation eines Vektors mit einem Skalar
r
A
r
3 A=?
ax 3 ax
r
3 A = 3 ay = 3 ay
a 3a
z z
Addition von Vektoren
r
A
r
−B
r
B
Multiplikation mit einem
Skalar ändert den Betrag
des Vektors
a b a − bx
r r
r x x x
C = A + − B = a y − by = a y − by
a b a −b
z
z z z
( )
Skalarprodukt von zwei Vektoren – Inneres Produkt
r r
r r
A B = a x bx + a y by + a z bz = A B cos γ AB
r
B
γ AB
Skalarprodukt von zwei Vektoren liefert einen Skalar
r
A
Anschaulich: Projektion
3
4.1 Geschwindigkeit im Raum
r
r
r
P1 P2 r (t + ∆ t ) − r (t ) ∆ r (t ) r
=
=
= v (t )
∆t
∆t
∆t
P1
Geschwindigkeit ist
eine gerichtete Größe.
P2
r
v (t ) zeigt in Richtung der
Tangente der Bahnkurve
∆ t → 0, P2 → P1
Momentangeschwindigkeit
r
r
r
r (t + ∆ t ) − r (t ) d r r&
r
v (t ) = lim
=
= r (t )
∆t → 0
dt
∆t
Die Geschwindigkeit eines
Massepunktes ist die Ableitung
seines Ortsvektors nach der Zeit.
4.1 Infinitesimalrechnung mit Vektoren
r
A(t )
r r
r
r
r
r
∆ A = A(t 2 ) − A(t1 )
r& dA
(
)
(t1 )
A
t
−
A
2
Ableitung A =
: = lim
∆ t →0
r
dt
∆t
r
A(t 2 )
A(t1 )
r
r
r&
r&
d
λ (t ) ⋅ A = λ& (t ) ⋅ A + λ (t ) ⋅ A
Produktregeln: B (t ) =
dt
r
r
r& r r r&
d
A⋅B = B ⋅ A + B ⋅ A
dt
Ableitung eines von dem Parameter t abhängigen Vektors
(
(
)
)
Integration eines von dem Parameter t abhängigen Vektors
r&
A(t 2 )
t2
r
r
2
t1
r&
A(t1 )
r
&
∫ A(t ) dt = A(t ) − A(t )
Beispiel:
1
r
r
A(t ) = r (t )
Ortsvektor
Integration über Geschwindigkeit
liefert Ortsvektor
4
4.1 Beschleunigung
Auch Beschleunigung ist eine
gerichtete Größe.
Beschleunigungsvektor ist
die zeitliche Ableitung des
Geschwindigkeitsvektors.
Zur Berechnung der
Komponenten des
Beschleunigungsvektors bildet
man die Ableitungen der
Komponenten der
Geschwindigkeit nach der Zeit
a x = v& x = &x&; a
v x ( t ) v& x
d
r d r
v (t ) =
a=
v y ( t ) = v& y
dt
dt
v z ( t ) v& z
y
= v& y = &y&; a
z
= v& z = &z&
4.1 Eindimensionale Bewegung
Beispiel: Senkrechter Wurf
Anfangsbedingungen
0
0
0
r
r
r
r (t = 0 ) = 0 , v (t = 0 ) = 0 , a = 0
z
v
− g
0
0z
Bewegung auf der z-Achse
0
r
r (t ) =
0
1
− g t 2 + v0 z t + z0
2
5
4.1 Freier Fall
Die Beschleunigung wächst
nicht mit der Zeit.
Die Beschleunigung ist
konstant
Erdbeschleunigung
a = g = 9.81 m s −2
Die Geschwindigkeit
wächst linear mit der Zeit
Der Weg wächst
quadratisch mit der Zeit
4.1 Konstante Beschleunigung
dv
= const
dt
a dt = dv Separation der Variablen
a=g=
t
v
t0 = 0
v0
∫ a dt = ∫ dv
Integration
a t = v − v0 ⇒ v = a t + v0
dx
a t + v0 =
dt
a t dt + v0 dt = dx
t
∫
t0 = 0
a t ′ dt ′ +
t
x
t0 = 0
x0
∫ v0 dt ′ = ∫ dx
a 2
t + v0 t = x − x0
2
⇒
x=
a 2
t + v0 t + x0
2
6
4.1 Superpositionsprinzip
Bewegung in 3 Koordinatenrichtungen sind unabhängig
voneinander !
Beispiel: Schiefer Wurf
Anfangsbedingungen
0
v0 x
0
r
r
r
r (t = 0) = 0 , v (t = 0 ) = 0 , a = 0
h
v
− g
0z
Bewegung in der x-z-Ebene
Elimination von t
v0 x t
r
0
r (t ) =
1
− g t 2 + v0 z t + h
2
x (t ) = v0 x t ⇒ t =
⇒
z(x ) = −
1
x (t )
, z (t ) = − g t 2 + v0 z t + h
2
v0 x
1 g 2 v0 z
x +
x+h
v0 x
2 v02x
4.1 Schiefer Wurf
Bahnkurve ist eine Parabel
Scheitel bei xS:
z(x ) = −
1 g 2 v0 z
x +
x+h
v0 x
2 v02x
dz ( x )
g
v
!
= 0 ⇒ − 2 xS + 0z = 0 ⇒
dx x = x S
v0 x
v0 x
xS =
Wurfweite xW:
xS =
v0 z v 0 x
g
v0 cos ϕ v0 sin ϕ v02
=
sin 2ϕ
2g
g
1 g
v
!
z ( xW ) = 0 ⇒ − 2 xW2 + 0 z xW + h = 0
2 v0 x
v0 x
v v
v v
xW = 0 z 0 x ± 0 z 0 x
g
g
2
2v02x h
+
g
v02
2gh
xW =
sin 2ϕ 1 + 1 + 2 2
2g
v0 sin ϕ
7
4.1 Schiefer Wurf: Wurfweite
Bei welchem Abwurfwinkel erreicht man die maximale Wurfweite ?
xW (ϕ ) =
2gh
v02
sin 2ϕ 1 + 1 + 2 2
2g
v0 sin ϕ
h=0 ⇒
xW (ϕ ) =
v02
sin 2ϕ
g
! dx (ϕ )
0= W
dϕ
v02
cos 2ϕ
g
⇒ ϕ max = 45°
0=2
4.1 Test des Superpositionsprinzip
Affenschuss
frei fallender
„Affe“
Bahnkurve des „Pfeils“
Affe und Pfeil starten zum
gleichen Zeitpunkt t=0
Wohin muss der Jäger zielen ?
v0 x t
r
!
rPfeil (t ) =
g =
v0 z t − t 2
2
xA
r
rAffe (t ) =
g
h − t2
2
2
2
xA
xA g xA
g xA
= h −
⇒ t=
−
, v0 z
v0 x
v0 x 2 v0 x
2 v0 x
⇒
v0 z
h
=
v0 x x A
Auf den Affen !
8
4.1 Nicht konstante Beschleunigung
Als Funktion der Zeit ändert sich der Betrag und die Richtung der
Geschwindigkeit
Zerlegung der Beschleunigung
Tangentialkomponente
Normalkomponente
r
a (t ) in zwei Komponenten:
r
r
a t (t ) || v (t )
r
r
a n (t ) ⊥ v (t )
r
v
r
Änderung der Richtung von v
Änderung des Betrags von
4.1 Gleichförmige Kreisbeschleunigung
Spezialfall der beschleunigten Bewegung
r
r
v = konstant ⇒ a = 0
t
ds
dϕ
∆s
∆ϕ
v=
= R
=
= R
dt
dt
∆t
∆t
Definition der Winkelgeschwindigkeit
ω =
dϕ
dt
[ω ] =
r
R cos ω t r
r
d r − Rω sin ω t
, v (t ) =
=
r (t ) =
dt Rω cos ω t
R sin ω t
r
r
r
d v − Rω 2 cos ω t
Beschleunigung
= −ω 2 r (t )
=
a (t ) =
2
zum Mittelpunkt
dt − Rω sin ω t
Umlaufperiode
T=
2π
ω
Umlauffrequenz
υ=
rad
s
v2
a =ω R =
R
2
1 ω
=
T 2π
9
4.2 Dynamik eines Massenpunktes
Dynamik: Frage nach der Ursache der Bewegung
Einführung der Begriffe Masse und Kraft zur Beschreibung der
Bewegung
Galileo Galilei (1564-1642) stellte fest:
Eine geradlinig gleichförmige Bewegung einer Masse mit
konstanter Geschwindigkeit bedarf keiner Ursache, sondern geht
aus sich heraus immer weiter. → Trägheitsprinzip
Ruhe ist nur ein Spezialfall der geradlinig gleichförmigen Bewegung
Um die Geschwindigkeit einer Masse zu verändern, muss auf
die Masse eine Kraft wirken.
4.2 Newtonsche Prinzipien
Newton 1686 „Mathematische Prinzipien der Naturphilosophie“
I. Trägheitsprinzip
Jeder Körper verharrt im Zustand der Ruhe oder
der geradlinig gleichförmigen Bewegung, wenn
er nicht durch äußere Kräfte gezwungen wird,
diesen Zustand zu ändern.
II. Aktionsprinzip
Ein frei beweglicher Körper der
Masse m erfährt durch eine Kraft
eine Beschleunigung a, die der
wirkenden Kraft proportional ist.
F
r
r
F =ma
Isaac Newton
(1643-1727)
III. Reaktionsprinzip
Wirken zwischen zwei Körpern Kräfte, so ist die Kraft F12, die
der Körper 1 auf den Körper 2 ausübt, dem Betrag nach gleich,
der Kraft F21, die vom Körper 2 auf den Körper 1 wirkt, aber
entgegengesetzt groß
10
4.2 Trägheitsprinzip und Impuls
Maß für den Bewegungszustand eines Körpers, der berücksichtigt,
wie leicht sich die kinematischen Größen, Geschwindigkeit und
Beschleunigung eines Körpers, ändern lassen
Definition: Impuls
r
r
p := m v
Damit lautet das Trägheitsprinzip:
Der Impuls eines Körpers auf den keine äußere
resultierende Kraft wirkt ist zeitlich konstant
Da es keine absolute Geschwindigkeit gibt ist auch der Impuls keine
absolute Größe
Der Wert hängt vom Bezugssystem ab
4.2 Versuch: Trägheit
Die Masse ist ein Maß für den Widerstand (Trägheit) eines Objektes
gegen eine Änderung seines Bewegungszustandes.
Bewegung der Münze
hängt von der
Geschwindigkeit des
Papiers ab
Es gibt keinen Unterschied zwischen schwerer und träger Masse,
da Masse durch die Beschleunigung aufgrund einer wirkenden Kraft
definiert ist, wobei es egal ist, ob die Kraft aufgrund der
Gravitation, oder anderer fundamentaler Wechselwirkungen (z.B.
elektromagnetische Wechselwirkung) wirkt.
11
4.2 Aktionsprinzip – Definition der Kraft
Die auf einen Massenpunkt wirkende Kraft ist identisch mit der
Änderung seines Impulses
r d pr
F :=
dt
r
r d pr d mvr r d m
dv
=
=v
+m
F=
dt
dt
dt
dt
klassische Mechanik
r
v
dm
dv
r
=0 ⇒ F =m
=ma
dt
dt
4.2 Reaktionsprinzip
Wirken zwischen zwei Körpern Kräfte, so ist die Kraft
F12, die der Körper 1
auf den Körper 2 ausübt, dem Betrag nach gleich, der Kraft F21, die vom
Körper 2 auf den Körper 1 wirkt, aber entgegengesetzt groß
r
r
F12 = − F21
m1
m2
dp1
dp
=− 2
dt
dt
dp1 dp2
+
=0
dt
dt
p = p1 + p2 = konstant
Im einem abgeschlossenen System wirken keine äußeren Kräfte
und somit gilt Erhaltung des Gesamtimpulses
12
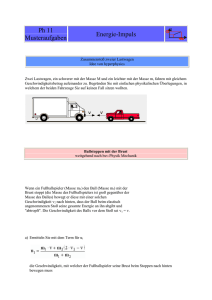
4.2 Wo ist hier die Gegenkraft ?
FN
5 kg
FG
Vorsicht bei der Unterscheidung von Kräftegleichgewicht
und Reaktionsprinzip !
→ Rasterkraftmikroskop
→ Reibung
Reaktionsprinzip bezieht sich auf
zwei gegengleiche Kräfte
der gleichen Wechselwirkungsart
Gravitation, elektromagnetische Kräfte, schwache Kraft, starke Kraft
zwischen zwei Körpern
4.3 Kräfte
Impulsänderung
r d pr
F :=
dt
[F ] = 1 kg m2 = 1 N
s
Da Masse durch Prototyp festgelegt ist ist die Kraft eine
abgeleitete Größe. Kräfte sind über Masse, Länge und Zeit
definiert.
Fundamentale Wechselwirkungen
Gravitation, Elektromagnetische Wechselwirkung,
Schwache Wechselwirkung, Starke Wechselwirkung
Scheinkräfte
Corioliskraft
Dynamik bei Beobachtung in Nicht-Inertialsystemen
13
4.3 Versuch: Kraftmessung
Dynamische Kraftmessung: Messung der Beschleunigung
→ Gravimeter
Statische Kraftmessung: Messung durch Kräftegleichgewicht
Torsionsfederwaage
Federwaage
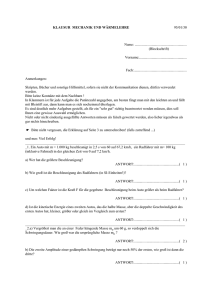
4.3 Rasterkraftmikroskopie
Positionierung
„Cantilever“
Spitze
Probenoberfläche
Atome einer 7x7
rekonstruierten
Si(111) Oberfläche
14
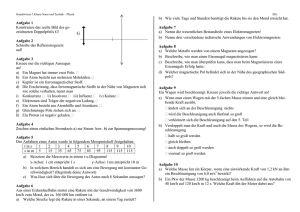
4.3 Addition von Kräften
Greifen an einer Masse mehrere Kräfte an, so gibt es zwei mögliche Fälle:
Wenn die vektorielle Summe der Kräfte null ist, dann verharrt die
Masse in Ruhe oder gradlinig gleichförmiger Bewegung.
r
F1
r
F4
r
F3
r
F1
r
F2
r
F4
r
F2
r
F3
Verbleibt eine resultierende Kraft
dann beschleunigt diese die
Masse.
n
r
∑F
i
∑F
i
i =1
=0
i =1
Wichtiges Prinzip in der Statik
r
FR
r
r
= FR = m ⋅ a
r
n
r
m⋅a
r
F2
r
F1
4.3 Vorsicht im Umgang mit Kräften
Trägheit ist keine Gegenkraft
→ Trägheitsprinzip
Kraft und Reaktionskraft greifen nicht am gleichen Körper an
→ Actio = Reactio
→ Wechselwirkungen
Die Fliehkraft ist nicht die Gegenkraft zur Zentripetalkraft
→ Gleichförmige Kreisbewegung
→ Scheinkräfte
→ Kräfte am Pendel
Kraftrichtung und Bewegungsrichtung sind selten identisch
→ Senkrechter Wurf, Schiefer Wurf
15
4.3 Fundamentale Wechselwirkungen
Kraft
Reichweite Relative
(m)
Stärke
Wechselwirkung
Gravitationskraft
zwischen Massen
Gravitationsladung
(Anziehend)
„Schwache“ Kraft
Wechselwirkung beim
β-Zerfall
schwache Ladung
Coulombkraft
„Starke“ Kraft
∞
10-22
≤ 10-17
10-14
zwischen elektrischen
Ladungen
(Anziehend und Abstoßend)
∞
10-2
zwischen den
Kernbausteinen
starke Ladung (Farbladung)
≤ 10-15
1
4.4 Impuls
Suche nach einer gerichteten (vektoriellen) Erhaltungsgröße in
einem abgeschlossenen System (ohne äußere Kräfte).
Es wirken innere Kräfte
(Wechselwirkung) aber
keine äußeren Kräfte.
Die Gesamtgeschwindigkeit
wird nicht erhalten.
Aber für die Produkte aus Massen und
Geschwindigkeiten finden wir
Das Produkt
r
r
p = mv
r
r
m1 v1 + m2 v 2 = konstant
nennt man Impuls
Der Impuls ist ein Vektor
„Impuls“ ist uns aus der Alltagserfahrung wenig vertraut. Im
Sprachgebrauch heißt es soviel wie „Anstoß“.
Der physikalische Begriff kommt wohl aus der Beobachtung bei Stößen.
16
4.4 Versuch: Stoß auf Luftkissenschiene
Modell einer Wechselwirkung
Es wirken innere Kräfte (Magneten) aber keine äußeren Kräfte
(Schwerkraft ist senkrecht zur Bewegungsrichtung).
Die Gesamtgeschwindigkeit wird nicht erhalten.
4.4 Impulserhaltung
Die Impulserhaltung ist grundlegend in der Physik
→ Energieerhaltung
→ Reaktionsprinzip
Die vektorielle Summe aller Impulse in einem
abgeschlossenen System wird erhalten
r
r
p = ∑ m i v i = konstant
i
Impulserhaltungssatz ist hilfreich, um Aussagen über den
Bewegungszustand nach einer Wechselwirkung zu machen, ohne die
Bahnen der Massen während der Wechselwirkung zu kennen.
vorher
r
p
r
mi vi
nachher
interne
Kräfte
wirken
r
mi vi
r
p
17
4.4 Schwerpunkt
Behandlung eines Systems von
r
ri
n
Schwerpunkt
r
rS =
∑m
i
i =1
n
∑m
n Massenpunkten mi
massengewichtete
Durchschnittskoordinate
i
i =1
r
r ∑ pi
dr
r
v S = S = i =1
dt
mtotal
n
r
r
p S = ∑ pi
n
Die Bewegung des Schwerpunktes wird
durch die Schwerpunktsgeschwindigkeit
beschrieben
Der Schwerpunktsimpuls ist Summe der
Einzelimpulse
Der Schwerpunkt bewegt sich so, als ob die
Gesamtmasse mtot am Ort des Schwerpunktes
unter dem Einfluss aller äußeren Kräfte steht
i =1
r
r
d pS
= ∑ Fextern
dt
extern
4.5 Arbeit, Energie, Potential
Arbeit wird verrichtet wenn eine Masse angehoben wird.
„Steine auf den Berg schleppen ist anstrengend.“
Arbeit wird aber nicht verrichtet beim Erzeugen einer
Kompensationskraft zur Gewichtskraft, d.h. beim Halten einer Masse.
Widerspricht Alltagserfahrung: „Steine halten ist auch anstrengend.“
Man kann die Steine auf einen Tisch legen, der die Kompensationskraft
erzeugt. Der Tisch verrichtet dabei keine Arbeit, sondern es wirken nur Kräfte.
Arbeit wird verrichtet, wenn man eine Masse gegen eine Kraft verschiebt.
Keine Arbeit wird verrichtet bei waagerechtem Verschieben auf einer
Luftkissenschiene, weil keine Kraft in diese Richtung wirkt.
Beim Verschieben der „Steine auf dem Tisch“ wird Arbeit verrichtet, da
die Verschiebung gegen die Reibungskraft verläuft.
18
4.5 Definition der Arbeit
Arbeit = Kraft · Weg
r r
W = F ⋅s
[W ] = 1 Nm = 1 J
Die Arbeit ist eine skalare Größe. Sie
wird aus zwei Vektoren berechnet.
→ Skalarprodukt
r r r r
F ⋅ s = F s cos α
Das Skalarprodukt berücksichtigt nur
die Komponente des einen Vektors, die
in die Richtung des anderen Vektors
zeigt und multipliziert mit dem Betrag
des anderen Vektors.
r
F
α
r
F⊥
r
F||
r
s
4.5 Arbeit bei ortsabhängiger Kraft
Die Verschiebung muss in kleine Stücke zerlegt werden.
Die Arbeit wird für jedes Stück berechnet und aufsummiert.
r
r2
r
∆s
r
F
r
r1
Grenzübergang zu
W=
r
r r
W = ∑ F ⋅ ∆s
∆s → 0 liefert Integral
r
∫ F ⋅ ds
Die Arbeit ist das Wegintegral der Kraft
Kurve
19
4.5 Kinetische Energie
Arbeit wird an einem Massenpunkt verrichtet
Dies impliziert, dass die Arbeit noch irgendwie in dem Massenpunkt steckt
Ein Massenpunkt werde aus der Ruhelage mit einer konstanten
Kraft beschleunigt
Die verrichtete Arbeit nach der Strecke
Gleichzeitig gilt:
a=
s=
W=
1
m v2
2
F
m
1F 2
t
2m
s ist dann W = Fs
F
t
m
2ms
⇒ t=
F
⇒ v=
2F s
2W
=
⇒ v =
m
m
Beziehung gilt auch für
nicht gleichförmige
Beschleunigung
Kinetische Energie
4.5 Leistung
Time is money
Knowledge is power
Power is work per time
Money is work per knowledge
Physikalische Definition:
Leistung
P := Verrichtete Arbeit pro Zeit
Dimension
P=
dW
dt
kg m 2
[W ] = 1 3 = 1 N m = 1 J = 1W
s
s
s
James Watt
(1736 – 1819)
r
r r
dW d r r d r d s
d r r
= ∫ F ⋅d s = ∫ F ⋅ d t = ∫ F ⋅v d t = F ⋅v
P=
dt dt
dt
dt
dt
20
4.5 Leistung beim Beschleunigen
Beschleunigung mit konstanter Kraft:
Differentialgleichung integrieren:
r r
F2
r r
t + v0 ⋅ F
⇒ P (t ) = F ⋅ v (t ) =
m
r
d 2 r (t ) r
m
=F
dt2
r
r
d r (t ) r
F
r
= v (t ) = t + v0
dt
m
r
r
F 2 r
r
r (t ) =
t + v0 t + r0
2m
Die Leistung steigt
quadratisch mit der
beschleunigenden Kraft,
aber linear mit der Zeit an
4.5 Kraftfelder
Die Kraft auf eine Masse kann an verschiedenen Orten unterschiedlich sein.
Zur vollständigen Angabe muss für jeden Ort
angegeben werden.
→
Kraftfeld
Kraftlinien verlaufen so, dass in jedem Punkt
der Tangente an die Kraftlinie hat.
r
r = ( x, y , z )
der Kraftvektor
rr
r
r die Kraft F(r) die Richtung
r
F = ( Fx , Fy , Fz )
r r
F (r ) = ( Fx ( x, y, z), Fy ( x, y, z), Fz ( x, y, z))
Kraftfelder sind etwas Reales.
In einem Gravitationsfeld bzw. einem
elektromagnetischen Feld ist Energie gespeichert.
Mit dem Aktionsprinzip kann man die
r
Beschleunigung
r r einer Masse am Ort r in einem
Kraftfeld F (r ) direkt berechnen.
21
4.5 Konservative Kraftfelder
Beispiel: schiefe Ebene ohne Reibung (konstante Kraft)
r
r2
r
F
r
∆s
r
r1
Wenn die verrichtete Arbeit unabhängig vom Verlauf des Weges
r
r
zwischen zwei beliebigen Punkten r1 und r2 ist, nennt man das
Kraftfeld konservativ.
Hier zählt nur die Aufwärtskomponente des Weges, d.h. die
Komponente der Verschiebung in Richtung der Kraft.
4.5 Konservative Kraftfelder
Ein Kraftfeld ist konservativ, wenn die verrichtete Arbeit entlang jeder
geschlossenen Kurve gleich Null ist.
r r
F
∫ ⋅ ds = 0
(Linienin tegral)
Auch folgende Formulierung ist äquivalent:
Ein Kraftfeld ist konservativ, wenn in jedem
Punkt die Wirbelstärke gleich Null ist.
(Wirbelstärke wird
r dem
r mit
r mathematischen
Operator rot F = ∇ × F berechnet.)
r
In einem Wirbelfeld ( rot F ≠ 0 ) wird auf einer
geschlossenen Bahn Arbeit verrichtet.
22
4.5 Vektorrechnung: Kreuzprodukt
Kreuzprodukt zweier Vektoren liefert wieder einen Vektor
a b − a z by
r r y z
A × B := a z bx − a x bz
a b − a b
y x
x y
r
r
(A × Br )⋅ A = a (a
x
y
Kreuzprodukt
ist nur im ù3
definiert !
γ AB
r
B
r
A
bz − a z b y ) + a y (a z bx − a x bz ) + a z (a x b y − a y bx ) = 0
r r
r
A × B steht senkrecht auf A
r
B
r r
A×B
und
r
B
Vektorprodukt entspricht der Fläche des
aufgespannten Parallelogramms
r
A
r r
r r
A × B = A B sin γ AB
4.5 Vektoranalysis: Rotation
r r r
Was bedeutet rot F = ∇ × F ?
∂
∂x
r ∂
Differentialoperator „Nabla“
∇=
∂y
∂
∂z
∂Fz ∂Fy
∂
−
y
z
∂
∂
∂
x
F
r r ∂ x ∂Fx ∂Fz
∇× F =
−
× F =
∂y y ∂z
∂x
∂ Fz
∂Fy ∂Fx
∂x − ∂y
∂z
23
4.5 Vektoranalysis: Rotation II
Wegintegral
r r
F
∫ ds
Γ
entspricht anschaulich der
„Zirkulation“ des Vektorfeldes
Zerlegung von Γ in zwei
geschlossenen Kurven Γ1 und
r r
r r
r r
F
d
s
=
F
d
s
+
F
∫
∫
∫ ds
Betrachtung einer infinitesimalen
geschlossenen Kurve
Γ
Γ1
r r
F
∫ d s = Fx (12) dx − Fx (34) dx + Fy (23) dy − Fy (41) dy
Γ2
Γ2
dFy
dFy dFx
dFx
dx dy
dy dx +
dx dy =
−
dy
dx
dy
dx
r r
= ∇ × F z da
Rotation liefert lokale Zirkulation
=−
(
)
4.5 Vektoranalysis: Satz von Stokes
r r r r
F
∫ ds = ∇×F
(
Für infinitesimalen
geschlossenen Weg in
xy-Ebene gilt
Verallgemeinerung:
r
r r
r
∫Γ F d s = ∫∫ (∇ × F ) da
r
)
z
da
Satz von Stokes
S
Drehsinn und
Vorzeichen gemäß
Rechter-Hand-Regel
24
4.5 Dissipative Kraftfelder
Beispiel: schiefe Ebene mit Reibung
r
r2
r
F
r
∆s
r
r1
Die verrichtete Arbeit ist wegabhängig !
Ein Teil der Arbeit wird in Reibungswärme umgewandelt und liegt nicht
mehr als mechanische Energie vor.
4.5 Potentielle Energie
Voraussetzung: konservatives Kraftfeld
Verrichtete Arbeit hängt nur von Startpunkt
nicht vom Wegverlauf dazwischen.
Die Arbeit, die verrichtet werden muss, um den
Körper vom Startpunkt zum Endpunkt im
Kraftfeld (z.B. Schwerefeld) zu verschieben
Hier ist eine Haltekraft
r
r
r1 und Endpunkt r2
ab,
r
r2
r r
r
W = − ∫ F (r ) ⋅ d s
r
r1
r r
r r
− F (r ) auf den Körper wirksam, die F (r )
kompensiert, damit Körper nicht beschleunigt wird.
Vorzeichen: So gewählt, dass dem Körper zugeführte Arbeit positiv ist.
r
Wählt man den Startpunkt als Referenzpunkt rRef , kann man jedem Ort
eine potentielle Energie zuordnen.
r
r
r r
r
(
)
E pot r = − ∫ F ⋅ ds
r
rRef
25
4.5 Bestimmung der Kraft aus dem Potential
Umkehrung zur Berechnung der potentiellen Energie
→ Ableitung des Potentials
r
r r
r
r
F (r ) = − grad E pot (r ) = −∇ E pot (r )
Gradient in kartesischen Koordinaten
r
grad ϕ ( x,y,z ) = ∇ϕ ( x,y,z )
∂ϕ ( x,y,z )
∂ϕ
∂x
∂x
∂ϕ ( x,y,z )
∂ϕ
ϕ ( x,y,z ) =
=
∂y
∂y
∂ϕ ( x,y,z )
∂ϕ
∂z
∂z
Der Gradient gibt Richtung und Betrag der Steigung eines Skalarfeldes an.
Anschauliche Vorstellung:
→ Gradient zeigt bergauf r
Potentielle Energie = Berglandschaft
Kraft wirkt bergab =
r
− ∇ E pot (r )
4.5 Vektoranalysis: Gradient
r
Was bedeutet grad Φ = ∇ Φ ?
→
Skalarfeld Φ
“F
Kurve
Φ (2 ) − Φ (1) = ?
Γ
ds→
(1)
Zerlegung des Weges in infinitesimale Wegstücke
Änderung von
Φ auf Wegstück ds→
Integration liefert:
(2)
ds→
r
r
dΦ = ∇Φ ⋅ ds
:
(2 ) r
r
Φ (2 ) − Φ (1) = ∫ ∇Φ ⋅ d s
(1)
Γ
Linienintegrale über Gradienten von Skalarfeldern sind wegunabhängig
r r
∇ × ∇Φ = ?
( )
→ Vektoranalysis: Divergenz
26
4.5 Energieerhaltung
Mechanische Gesamtenergie eines Massenpunktes am Ort
r
r
r
E ges (r ) = E pot (r ) + E kin (r )
r
r
Energieerhaltung:
In einem konservativen Kraftfeld ist an jedem Raumpunkt die Summe
aus potentieller und kinetischer Energie eines Massenpunktes konstant
Erhaltung der Energie ist von grundlegender Bedeutung in der Physik.
Wenn das Kraftfeld nicht konservativ ist, geht mechanische Energie bei
Bewegung verloren. Reibungskräfte z.B. verwandeln kinetische Energie
in Wärmeenergie, d.h. in Bewegungsenergie einzelner Gasmoleküle
oder in Schwingungsenergie von atomaren Bausteinen in Festkörpern.
Energiebilanz stimmt nur, wenn alle Energieformen betrachtet
werden.
4.5 Anwendung des Energieerhaltungssatzes
Der Energiesatz ist praktisch, um z.B. den Betrag der Geschwindigkeit
zu berechnen ohne die genaue Bahnkurve bestimmen zu müssen.
freier Fall
Pendel
E kin
1
= m v2
2
E pot = m g h
E pot = m g h
E pot = m g h
r
v
h
r
v
1
E kin = m v 2
2
In beiden Fällen erhält man aus dem Energiesatz den gleichen Wert
r
v
.
Beim Fadenpendel wirken zusätzliche Kräfte (Fadenspannung), die
r
die Richtung von v ändern, aber keine Arbeit verrichten.
r
Die Fadenspannung steht immer senkrecht zu v und
r r
damit auch zum Weg ∆s = v ∆t .
27
4.6 Raketen
Rakete ändert ihre Masse durch den Ausstoß von verbranntem Treibstoff.
Berechnung im Bezugssystem Erde
Im Zeitintervall
dt stößt die Rakete die Masse dmT
mit Relativgeschwindigkeit
r r r
u = vT − v R aus.
Der Impulsübertrag auf den Treibstoff ist
r
r
d pT = d mT u
r
u
r
r
d pT
d mT r
=−
FAntrieb = −
u
dt
dt
r
Resultierende
r
d vR r
r
= FAntrieb + m R g
beschleunigende Kraft im F = m R
dt
Schwerefeld
Auf die Rakete wirkt
die Reaktionskraft
mR
r
vR
d mT
r
vT
mT
Einsetzen liefert:
r
1 d mT r r
1 d mR r r
d vR
=−
u+g=
u+g
dt
mR d t
mR d t
d mT = −d mR
4.6 Integration der Differentialgleichung
r
d vR
1 d mR r r
=
u+g
dt
mR d t
r
t
t
1 dm r r
d vR
′
=
d
t
∫0 d t ′
∫0 mR (t ′) d tR u + g d t ′
r
r
r
v R (t ) − v R (0) = u
mR (t )
t
1
r
d mR′ + ∫ g d t ′
∫
mR′
m (0 )
0
r
r r
r
v R (t ) − v0 = u ( ln m R (t ) − ln m0 ) + g t
r
r r m (t ) r
m (t )
v R (t ) = v0 + u ln R + g t; ln R < 0.
m0
m0
Endgeschwindigkeit hängt nur von der Ausstoßgeschwindigkeit
und vom Verhältnis Nutzlast / Startmasse ab.
u
28
4.6 Warum haben Raketen Brennstufen ?
Raketengleichung:
m (t )
r
r r m (t ) r
v R (t ) = v0 + u ln R + g t; ln R < 0.
m0
m0
Typischer Energiegehalt des Brennstoffes:
Abschätzung der maximalen
Ausstoßgeschwindigkeit vT
(Komplette Umwandlung in kinetische
Energie der Verbrennungsprodukte)
Realistische Ausstoßgeschwindigkeiten
wT ≈ 107 J kg-1
vT = 2 wT ≈ 4500 m s −1
vT = 2 wT ≈ 2000 m s −1
4.6 Stöße
Anwendung von Impuls und Energieerhaltung
Energie- und Impulserhaltungssatz sind ideal, um Aussagen über
den Bewegungszustand nach einer Wechselwirkung zu machen,
ohne die Bahnen der Massen während der Wechselwirkung zu kennen.
29
4.6 Stoßgesetze
keine Kräfte
r
v1
Elastischer Stoß
konservative Kräfte
keine Kräfte
r
u1
r
v2
nicht konservative Kräfte
r
u2
Inelastischer Stoß
gilt für elastische
und inelastische
Stöße
Impulserhaltungssatz
r
r
r
r
m1v1 + m2 v 2 = m1u1 + m2 u2
und
Elastische Stöße: Erhaltung der kinetischen Energie
Energieerhaltungssatz
1
1
1
2
2 = 1
2
2
m1 v1 + m2 v 2 m1 u1 + m2 u2
2
2
2
>2
Inelastischen Stöße: Umwandlung von mechanischer
Energie in andere Energie (z.B. Wärme)
4.6 Dezentraler Stoß
Dreidimensionale Bewegung
r
π
z
Es gelten beide Erhaltungssätze mit vektoriellen Geschwindigkeiten.
r
r
r
r
m1v1 + m2 v2 = m1u1 + m2 u2
1 r 2 1
r 2 1
r 2 1
r
m1 v1 + m2 v2 = m1 u1 + m2 u2
2
2
2
2
2
Komponentenschreibweise: Jede Komponente des Impulses wird erhalten
m1v1i + m2 v2i = m1u1i + m2 u2i , i = x, y , z
1
1
1
1
2
2
2
2
m1 ∑ v1i + m2 ∑ v2i = m1 ∑ u1i + m2 ∑ u2i
2 i = x, y,z
2 i = x, y, z
2 i = x, y,z
2 i = x, y, z
4 Gleichungen mit 6 Unbekannten u1x , u1y , u1z , u2x , u2y , u2z .
Ergebnis hängt von der Geometrie des Stoßes ab.
→ Berechnung der Bahnen aus der Kenntnis des Stoßparameters
πx, πy
30
4.6 Stoß im Schwerpunktsystem
Wahl des Koordinatensystems führt zur Vereinfachung.
Jedes Inertialsystem zur Beschreibung physikalischer Vorgänge geeignet.
(Inertialsystem =geradlinig-gleichförmig bewegtes Bezugssystem)
Der Gesamtimpuls eines abgeschlossenen Systems wird erhalten,
r
r
r
r
r
p gesamt = ∑ mi r&i = M r&S = M v S = p S
i
also bewegt sich der Schwerpunkt geradlinig-gleichförmig.
Wahl eines Inertialsystems mit Schwerpunkt als Ursprung.
Gesamtimpuls im Schwerpunktsystem:
r
r
r
r
p1 + p2 = m1v1 + m2 v2 = 0
Der Gesamtimpuls im Schwerpunktsystem ist Null, da der
Schwerpunkt nun im Ursprung ruht.
4.6 Energieübertrag beim Stoß
Impulserhaltung:
r
r
∆ p1S = − ∆ p2 S
r
∆ p1S = ∆ pS
r
r
= mi uiS − viS , i = 1,2
∆ p S = 2 m v cos
θS
2
Energieerhaltung bei elastischem Stoß:
r 2 1 r 2 1
r 2
1 r 2 1
m1 v1 + m2 v2 = m1 u1 + m2 u2
2
2
2
2
r 2 r 2
r 2 r 2
m1 v1 − u1 = m2 v 2 − u2
r
r r
r
r
r
r
r
mi ( vi − ui )( vi + ui ) = 0 wegen m1 v1 = m2 v2 = m1 u1 = m2 u2
(
)
(
)
Kein Energieübertrag !
Meinungsumfrage: Hängt Energieübertrag vom Bezugssystem ab ?
31
4.6 Energie- und Impulsübertrag beim Stoß
Impulserhaltung:
r
r
∆ p1S = − ∆ p2 S
r
∆ p1S = ∆ pS
r
r
= mi uiS − viS , i = 1,2
Impulsänderung:
∆ p S = 2 m v cos
θS
2
Energieerhaltung bei elastischem Stoß:
r 2 1 r 2 1
r 2
1 r 2 1
m1 v1 + m2 v2 = m1 u1 + m2 u2
2
2
2
2
r 2 r 2
r 2 r 2
m1 v1 − u1 = m2 v2 − u2
r
r r
r
r
r
r
r
mi ( vi − ui )( vi + ui ) = 0 wegen m1 v1 = m2 v2 = m1 u1 = m2 u2
)
(
)
(
Kein Energieübertrag !
Meinungsumfrage: Hängt Energieübertrag vom Bezugssystem ab ?
4.6 Transformation ins Laborsystem
r
r
r
r
r
r
r
r
r
r
∆ p L = mi (uiL − viL ) = mi (uiS + wLS − (viS + wLS )) = mi (uiS − viS ) = ∆ p S
32
4.6 Energieübertrag im Laborsystem
1
r
r
∆ E L = mi uiL 2 − viL 2
2
1
r
r 2 r
r 2
= mi (uiS + wLS ) − (viS + wLS )
2
1
r 2 r 2
r r
r 2 r 2
r r
= mi uiS + wLS + 2 uiS wLS − viS − wLS − 2 viS wLS
2
1
r 2 r 2
r r r
= mi uiS − viS + mi ( uiS − viS ) wLS
2
rr
= ∆ E S + ∆ p wLS
rr
= ∆ p wLS
(
)
(
)
(
(
)
)
Energieübertrag ist vom Bezugssystem abhängig !
Spezialfall:
m2 vor Stoß im Laborssystem in Ruhe
Maximaler Energieübertrag:
∆E
E
=
4 m1 m2
(m1 + m2 )2
Maximaler
Energieübertrag
bei m2=m1
4.6 Inelastischer Stoß im Schwerpunktsystem
Der Gesamtimpuls im Schwerpunktsystem ist Null
r
∑p
=0
i
i
Durch Energieumwandlung wird die kinetische Energie kleiner.
Nach dem Stoß muss immer noch gelten:
r
∑ p′ = 0
i
i
Aber die einzelnen Impulse können kleiner sein.
Im Extremfall können alle Einzelimpulse Null werden.
Umwandlung der gesamten kinetischen Energie der Relativbewegungen.
Vom anderen Koordinatensystem aus gesehen:
Der „Schwerpunktimpuls“ und die „Schwerpunktenergie“ bleiben übrig:
r
r
pS = M v S
ES =
1 r
M vS
2
2
33
4.6 Stoß an Wänden
Das System ist nicht abgeschlossen. Äußere Kräfte der Wand.
Elastischer Stoß:
Die Wand bleibt in Ruhe, also kein Energieübertrag auf die Wand.
1
2
mv 2 = 12 mu 2
⇒
r r
v =u
r
u
Keine Kräfte parallel zur Wand
r
v
mv|| = mu||
Folglich:
mv ⊥ = −mu ⊥
Inelastischer Stoß:
1
2
mv 2 > 12 mu 2
⇒
r r
v >u
r
u
Keine Kräfte parallel zur Wand
r
v
mv|| ≈ mu||
Folglich:
mv ⊥ > − mu ⊥
4.7 Drehimpuls und Drehmoment
Definition: r
Drehimpuls L einer Punktmasse
r r r
L=r×p
[Lr ] = 1 kg m
Drehimpuls steht senkrecht auf der von
2
s −1 = 1 J s
r
r
r und p aufgespannten Fläche
Drehimpuls von Wahl des Koordinatensystems abhängig !
(wichtig ist dabei die Lage des Ursprungs)
Bei Bewegung in einer Ebene
zeigt der Drehimpuls immer in
die Normalenrichtung der Ebene
r r r
r
r r
L = r × ( p r + p⊥ ) = r × p⊥
34
4.7 Gleichförmige Kreisbewegung
Erinnerung: Winkelgeschwindigkeit
dϕ
v =rω =r
dt
r
L = m r v = m r 2ω
ω
Definition des Vektors der
r
Winkelgeschwindigkeit ω :
r
ω =
dϕ
dt
Richtung = Richtung der Drehachse
r r r
v =ω ×r
r
r
r
r und p senkrecht !
r
2 r
Drehimpuls für gleichförmige Kreisbewegung L = m r ω
Winkelgeschwindigkeit ω steht ebenfalls auf
4.7 Drehmoment
Zusammenhang zwischen Drehimpuls und Kraft
r r r
L=r×p
r
r
r
dL d r r r d p r r
r r r r
=
× p + r ×
= (v × p ) + r × F = r × F
dt dt
dt
r
r dL r r
=r ×F
M=
Definition des Drehmomentes
dt
(
)
Eine auf den Massenpunkt wirkende nichtradiale Kraft erzeugt ein
Drehmoment, das den Rotationszustand, d.h. den Drehimpuls ändert.
35
4.7 Drehimpulserhaltung in Zentralkraftfeldern
r r
r
Kraft wirkt ausschließlich in
Zentralkraftfeld: F (r ) = F (r ) er
radialer Richtung
r r
⇒ F || r
r
⇒ D=0
r
⇒ L = konstant
→ Gravitationsfeld
→ Coulombfeld
Drehimpulserhaltung
Folgerung aus der Drehimpulserhaltung:
mr 2ω = const
Drehimpulserhaltung
⇒ r ω = const
dϕ
⇒ r2
= const
dt
⇒ r 2 dϕ = const ⋅ dt
⇒ dA = const ⋅ dt
2
Flächensatz:
In gleichen Zeiten überstreicht der
Ortsvektor gleiche Flächen
→ 2. Keplersches Gesetz
4.7 Kinetische Energie der Kreisbewegung
1
1 2 2 1
2
Ekin = mv 2 = mr
{ω = J ω
2
2
2
:= J
Definition: Trägheitsmoment des Massenpunktes
Rotation
E rot =
1
J ω2
2
J := mr 2
Translation
Ekin =
1
m v2
2
Analoge Form der Gleichung !
36
4.7 Translation – Rotation
Lineare Bewegung
Rotationsbewegung
Ortskoordinate
Winkelkoordinate
θ
Winkelgeschwindigkeit
ω=
Trägheitsmoment
J = mr 2
x
r
r dr
v=
dt
Geschwindigkeit
Masse
m
Impuls
Kraft
Kinetische Energie
r
r
p = mv
r d pr
F=
dt
1
E kin = m v 2
2
r
dθ
dt
r
r
r r
L = m r ×v = J ω
r
r dL r r
Drehmoment
M=
= r ×F
dt
1
Kinetische Energie
E kin = J ω 2
2
Drehimpuls
4.8 Bewegung im Zentralpotential
Massenpunkt in Zentralkraftfeld (wirbelfreies Kraftfeld)
r r
r
F (r ) = F (r ) er
Es gilt:
Energieerhaltung
E kin + E pot = konst
Drehimpulserhaltung
r r
m r × v = konst
Beispiel:
Zweidimensionales
Federpendel
Potentielle
Energie
[will. Einh.]
y-Achse
x-Achse
37
4.8 2D-Federpendel in Zylinderkoordinaten
r r
ma=F
Bewegungsgleichung
in Zylinderkoordinaten
Drehimpuls
L = m ρ 2 ϕ&
m (ρ&& − ρ ϕ& 2 ) = − k ′ρ
bleibt erhalten
⇒ aϕ = a z = 0
r
L = m r v = m r 2ω
(
)
m ρ&& − m ρ ϕ& 2 = −k ′ρ
m ρ&& −
Reduktion auf eindimensionales Problem
mit effektiver Kraft
F`(ρ) lässt sich durch
Gradient eines Potentials
darstellen
L2
= − k ′ρ
mρ 3
m ρ&& = −k ′ρ +
F ′(ρ ) = −
L2
= F ′(ρ )
mρ 3
Zentralkraft !
d
d k′
L2
Φ ′(ρ ) = − ρ 2 +
dρ
dρ 2
2 mρ 2
4.8 Äquivalentes eindimensionales Potential
m = 1 kg
L = 1 kg m 2 s −1 = 1N m s
k ′ = 1N m −1
k′ 2
L2
ρ +
2
2 mρ 2
k′ 2
ρ
2
L2
2 mρ 2
38
4.9 Gravitation
Aus astronomischen Beobachtungen der Planetenbewegungen kann
das Gravitationsgesetz abgeleitet werden.
Pythagoräer: Planeten kreisen um die Sonne
Kopernikus: Heliozentristisches Weltbild
Von 1573-1601 sammelte Tycho Brahe mit
bloßem Auge (ohne Fernrohr) sehr präzise
Daten der Planetenbewegungen.
Kopernikus
(1473-1543)
Brahe
(1546-1601)
Johannes Kepler hat mit Hilfe dieser Daten die
Keplerschen Gesetze abgeleitet.
Kepler erkannte nicht das Gravitationsgesetz,
das aus seinen Gesetzen abgeleitet werden
kann.
Kepler
(1571-1630)
4.9 Keplersche Gesetze
1. Gesetz:
Die Planetenbahnen sind Ellipsen, in deren
einem Brennpunkt die Sonne steht.
2. Gesetz:
Die Verbindungslinie
r zwischen
Sonne und Planet überstreicht in
gleichen Zeiten gleiche Flächen.
(Flächensatz)
3. Gesetz:
Die Quadrate der Umlaufzeiten
T
zweier Planeten verhalten sich wie
die dritten Potenzen der großen
Halbachsen
a ihrer Bahnen.
2
3
T1
a
= 13
2
T2
a2
39
4.9 Newton und die Gravitation
Ursprünglich fand Newton 1665 das Gravitationsgesetz
aus folgender einfachen Abschätzung:
Ein Apfel, der vom Baum fällt, wird durch die
Gravitation mit ca. 10 m s-2 (g) beschleunigt.
2
Auf den Mond wirkt die
Zentripetalbeschleunigung
aZ =
v Mond
.
rMondbahn
2
v
m
= 0.00273 2 beschleunigt.
r
s
rMondbahn 60
Verhältnis der Radien:
≈
rErde
1
a Mond
1
1
≈
= 2
Verhältnis der Beschleunigungen:
g
3600 60
Er wird demnach mit
a=
Daraus zog Newton den kühnen Schluss, dass
Isaak Newton
(1643 – 1727)
F ∝ r-2
4.9 Gravitationsgesetz
Ableitung aus dem 3. Keplerschen Gesetz
Annahme (zur Vereinfachung): Planetenbahnen sind Kreisbahnen
Zentripetalbeschleunigung
3. Keplerschen Gesetz
az = ω2r =
1
c
= 3 , c = konstant
2
T
r
⇒ az =
4π 2 c
r2
⇒
4π 2 c m
= FG = m a z =
r2
Kraft
4π 2
r
T2
Wegen dem Reaktionsprinzip muss
die Kraft auch von der zweiten
Masse M (Sonne) abhängen
Kraft fällt mit r-2 ab und ist
proportional zur Masse
m
des Planeten
Gravitationsgesetz:
FG = − G
M ⋅m
r2
40
4.9 Messung der Gravitationskonstante
An der Erdoberfläche wird eine Masse
m mit der Kraft FG angezogen
FG = − G
m ⋅ mErde
r2
G ist die am wenigsten genau bekannte Naturkonstante.
G = 6.673(10) 10-11 m3 kg-1 s-2 (CODATA 1998)
Der Erdradius ist direkt messbar, nicht aber die Erdmasse !
Aus einer Messung der Kraft
Produkt
FG kann nur das
G⋅ mErde bestimmt werden !
Die Gravitationskonstante ist also nicht aus Planetenbewegungen
ableitbar, da Massen der Sonne und der Planeten unbekannt ist.
Gravitationskonstante G ist nur messbar, wenn beide beteiligten
Massen separat ausgemessen werden können.
4.9 Messung der Fallbeschleunigung
z.B. Messung der Fallzeit: (gleichmäßig beschleunigte Bewegung)
x (t ) =
a 2
t
2
⇒ t=
2x
a
daraus Bestimmung der Fallbeschleunigung
Mittlerer Wert:
g = 9.81 m
g
s-2
Versuch: Periodendauer eines Fadenpendels (→ Schwingungen)
Präzisionsmessung mit Gravimeter:
Absolutbestimmung von g mit Fallversuch
Ortsmessung x(t) mit Laserinterferometer und Atomuhr
Zurückführung auf Ort- und Zeitmessung ergibt hohe Genauigkeit
Relativer Fehler: 10-9
41
4.9 Anwendungen der Gravimetrie
Geophysikalische Einflüsse auf die Fallbeschleunigung:
Periode
Effekt
Größe [nm s-2]
0.1s –20 s
Seismik
< 10000
1min –1h
Oszillationen der Erde
< 10
4h – 8h
Slichter Moden
0.1
8h-∞
Tidenhub
< 3000
Erdkernschwingungen
0.01
Diurnal Free Wobble (NDFW)
0.1
Luftdruckschwankungen
< 300
1min-1a
-3 hPa-1
Grundwasserschwankungen
100
365 d
Jahrestide
30-60
436 d
Polbewegung
< 80
Geoforschungszentrum Potsdam www.gfz-potsdam.de
4.10 Gravitationsfeld
Es wird die Kraft auf eine kleine Masse
in der Nähe der Masse M gemessen.
Der Betrag der Kraft ist
m
r→
m⋅M
FG = G
r2
M
Die Richtung der Kraft zeigt auf
→
Masse M, d.h. in Richtung von -r .
→
r
r
m⋅M r
m⋅M r
FG = −G r 2 ⋅ r = −G r 2 ⋅ er
r
r
r
FG
Um das Feld unabhängig von der Masse m des Probekörpers zu machen,
führt man die Feldstärke
g ein.
r r
r r F (r )
M r
= − G r 2 er .
g(r ) =
m
r
42
4.10 Darstellung des Feldes durch Feldlinien
Jede Feldlinie beginnt im Unendlichen und endet an einer Masse.
Die Richtung der Feldlinie stimmt an jedem Punkt mit der Richtung der
Kraft auf eine Probemasse überein.
Die Dichte der Feldlinien pro Flächeneinheit (bei senkrechtem
Durchstoßen) ist proportional zum Betrag der Kraft.
Feldlinie
Äquipotentiallinie
4.10 Gravitationspotential
Gravitationsfeld ist ein Zentralkraftfeld
→ Feld lässt sich als Gradient eines Potentials darstellen
r
r r
r
r
FG (r ) = − grad Φ G (r ) = −∇ Φ G (r )
Zu zeigen, dass
r
Φ G (r ) = −G
Mm
r
das Gravitationspotential ist:
∂
∂x
r
r1
∂
r
1
− ∇Φ G (r ) = G M m ∇ = G M m
2
∂y
r
x + y2 + z2
∂
∂z
x
r
GMm
r
=−
y = −G M m r 3
r
(x 2 + y 2 + z 2 )3 2 z
43
4.10 Potential einer Punktmasse
r
Φ G (r ) = −G
Mm
r
4.10 Bewegungsgleichung
r
r
Ausgehend vom Startpunkt r (t = 0 ) = r0
r
r
mit Startgeschwindigkeit v (t = 0 ) = v 0
wird in jedem Moment folgendes berechnet:
aus der Kraft die Beschleunigung = Änderung der Geschwindigkeit,
r r
r&& F ( r )
r=
m
→
r r
r& F ( r ) r
v=
= a.
m
daraus die neue Geschwindigkeit = Änderung des Ortsvektors,
r r
r
r
r
FG (r (t ))
r (t )
v (t + ∆t ) − v (t ) =
∆ t = −G M r 3 ∆ t
m
r (t )
r
r
r
r (t )
v (t + ∆t ) = −G M r 3 ∆ t + v (t )
r (t )
r
r
r
daraus der neue Ort:
r (t + ∆t ) − r (t ) = v (t )∆ t
r
r
r
r (t + ∆t ) = v (t )∆ t + r (t )
44
4.10 Äquivalentes eindimensionales Potential
−
äquivalente
potentielle Energie
GM m
L2
+
r
2m r2
Rotationsenergie
L2
2m r2
−
GM m
r
potentielle Energie
4.10 Bahnkurven im Gravitationspotential
Zentralkraftpotential – somit gelten:
Energieerhaltung
Drehimpulserhaltung
E kin + E pot = konst
r r
m r × v = konst
Lösungen des Zweiköperproblems liegen in Ebene
→
1
1
Mm
Ekin = m v 2 = m ( ρ& 2 + ρ 2ϕ& 2 ), E pot = −G
,
2
2
ρ
1
1 L2
GMm
Energieerhaltung:
m ρ& 2 +
−
= Etot
2
2
2 mρ
ρ
Eliminieren von
ρ2
Zylinderkoordinaten
r
L = L = m ρ 2ϕ&
t
dϕ
L
=
dt m
⇒
dϕ
L
= 2
dt ρ m
⇒
d ρ d ρ dϕ d ρ L
=
=
dt
dϕ dt
dϕ ρ 2 m
2
GM m
1 L2 d ρ 1 L2
−
= Etot
+
4
2
2 ρ m dϕ 2 m ρ
ρ
45
4.10 Kegelschnitte
2
1 L2 d ρ 1 L2
GM m
−
= Etot
+
4
2
2 ρ m dϕ 2 m ρ
ρ
Lösung der Differentialgleichung liefert:
ρ=
L2
1
2 Etot L2
,
mit
ε
=
1
+
G M m 2 (1 + ε cos(ϕ ))
G 2 M 2 m3
ε
Etot
>1
>0
1
0
<1
0
Hyperbel
Parabel
<0
2
−
2
G M m
2 L2
Ellipse
3
Kreis
4.10 Warum heißen die Bahnen Kegelschnitte ?
Kreis
Winkel der Schnittebene zur
„Senkrechten“ ist größer als der
halbe Öffnungswinkel des Kegels
Ellipse
Parabel
Hyperbel
Kegelschnitte
Winkel der Schnittebene zur
„Senkrechten“ ist gleich dem
halben Öffnungswinkel des
Kegels
Winkel der Schnittebene zur
„Senkrechten“ ist kleiner als der
halbe Öffnungswinkel des
Kegels
→ Rutherfordstreuung
46
4.10 Bahnen im äquivalenten 1D Potential
Hyperbel
Parabel
Ellipse
Kreis
4.10 Reduzierte Masse
Bei bisheriger Behandlung der Dynamik von zwei Massenpunkten
wurde die Impulserhaltung verletzt da Masse M als ortsfest
angenommen wurde
r
r r
r12 = r1 − r2
m1
r
r1
r
R
m2
r
r2
Schwerpunkt
( )
(
r m1 rr1 + m2 rr2
R=
m1 + m2
)
r& r 2 1
r& r 2
1 r
1 r
1
Ekin = m1r&12 + m2 r&22 = m1 R + r&1′ + m2 R + r&2′
2
2
2
2
r&
r&
1
1 m m r
1
= (m1 + m2 )R 2 + 1 2 r&122 = (m1 + m2 )R 2 +
2
2 m1 + m2
2 44244
1
3
14243
Ekin der
=µ
reduzierte
Masse
Schwerpunktbewegung
1 r& 2
µ r12
2 23
1
Ekin der
Relativbewegung
Reduktion des Zweikörperproblems auf effektives Einkörperproblem
47
4.10 Potential mehrerer Punktmassen
Bei mehreren Massen werden die Potentiale addiert
→ Superpositionsprinzip
y
ϕ
x
4.11 Wechselwirkungen und Kräfte
Kraft
Wechselwirkung
Gravitationskraft
zwischen Massen
Gravitationsladung
(Anziehend)
„Schwache“ Kraft
Wechselwirkung beim
β-Zerfall
schwache Ladung
Coulombkraft
„Starke“ Kraft
Reichweite Relative
(m)
Stärke
∞
10-22
≤ 10-17
10-14
zwischen elektrischen
Ladungen
(Anziehend und Abstoßend)
∞
10-2
zwischen den
Kernbausteinen
starke Ladung (Farbladung)
≤ 10-15
1
48
4.11 Elektromagnetische Kraft
Kraft zwischen elektrisch geladenen Objekten
q, [ q ] = 1 A s = 1 C
r
r
1 q1 ⋅ q2 r12
Gleiche Form wie Gravitationskraft
⋅ r
FC =
4 π ε 0 rr12 2 r12
Elektrische Ladung
Kraft kann entsprechend der Ladungen Vorzeichen wechseln !
q1 q2 > 0
Abstoßung zwischen gleichartig geladenen Objekten
q1 q2 < 0
Anziehung zwischen gegengesetzt geladenen Objekten
Warum ziehen sich neutrale Objekte an ?
4.11 Van der Waals Kraft
In elektrisch neutralen Körpern können
elektrische Kräfte durch wechselseitige
Ladungsverschiebung (Polarisation)
auftreten
Diese Dipol-Dipol-Wechselwirkung
folgen der van der WaalsBeziehung
A B
E pot ∝
∝
r 12
−
r6
A
r12
B
∝− 6
r
Bei sehr kleinen Abständen
r < R0: abstoßend
Kürzere Reichweite als die
Coulombkraft
49
4.12 Bezugssysteme und Scheinkräfte
Physikalische Vorgänge kann man von verschiedenen
Standpunkten aus beobachten.
Koordinatensysteme mit gegeneinander verschobenem Ursprung sind
gleichberechtigt.
→ Inertialsysteme
Geradlinig-gleichförmig gegeneinander bewegte Koordinatensysteme
sind auch gleichberechtigt.
→ Inertialsysteme
Physikalische Vorgänge in beschleunigten Koordinatensystemen
verhalten sich anders.
→ Nicht - Inertialsysteme
Beobachtungen aus Inertialsystemen führen immer auf die gleichen
physikalischen Gesetze.
Aus physikalischen Messungen innerhalb eines Inertialsystems kann
man nicht feststellen, wo es sich befindet und wie schnell es sich
bewegt.
4.12 Galileitransformation
Das Koordinatensystem mit
Strich bewege sich mit der
Geschwindigkeit v0 gegen
das andere, dann
transformieren sich die
Koordinaten wie:
x´= x − v0t
Für die
Geschwindigkeit
bedeutet das
r
r d r´ r r
v´ =
= v − v0
dt
Für die
Beschleunigung
bedeutet das
r
r
r
r dv ´ dv dv 0 r
=
−
=a
a´ =
dt dt dt
y´= y
z´= z
t´= t
In beiden Systemen treten
die gleichen
Beschleunigungen und
damit auch Kräfte auf
50
4.12 Transformation von Energie und Impuls
Ist das System abgeschlossen wird aus jedem Inertialsystem die
gleiche potentielle Energie beobachtet
(potentielle Energie hängt nur von Relativkoordinaten ab)
Die kinetische Energie hängt von Wahl des Inertialsystems ab
(Erinnerung: Energieübertrag beim Stoß)
′ =
Ekin
r2
1 r
m v (t ) − u
2
Der Impuls hängt von Wahl des Inertialsystems ab
r
r r
p′ = m ( v − u )
Energie und Impuls bleibt nicht erhalten beim Übergang von einem
Inertialsystem zum Anderen.
Innerhalb von jedem Inertialsystem gelten die Erhaltungssätze
4.12 Frei fallende Bezugssysteme
Im Gravitationsfeld frei fallende Systeme sind Inertialsysteme.
Geradlinig beschleunigte Systeme sind nicht zu unterscheiden von
Systemen, die im Gravitationsfeld ruhen.
(Gleichheit von träger und schwerer Masse)
r
(| g |= 0)
Frei fallende Systeme sind zwar
beschleunigt, aber Gravitation
und Beschleunigung kompensieren
sich gerade.
→ Schwerelosigkeit
r
a
51
4.12 Scheinkräfte
Inertialsysteme: Keine Scheinkräfte
Beschleunigte Bezugssysteme:
Ein Experimentator im fensterlosen Labor
beobachtet „unerklärliche“ Kräfte.
Äußere Kräfte oder Kräfte durch
Beschleunigung des Koordinatensystems
geradlinig beschleunigte Systeme:
Trägheitskraft
rotierende Systeme:
Zentrifugalkraft, Corioliskraft
4.12 Zentrifugalkraft
Beobachtung aus ruhendem System:
Kreisbewegung der Kugel → Es wirkt eine Zentripetalkraft
Im rotierenden Bezugsystem ist Kugel in Ruhe !
Im rotierenden Bezugsystem wirkt eine Scheinkraft, die
Zentripetalkraft genau kompensiert
Scheinkraft, die unabhängig von der Geschwindigkeit des
Objektes im rotierenden Bezugssystem ist.
52
4.12 Zentrifugalkraft
Beobachtung aus ruhendem System:
Kreisbewegung der Kugel → Es wirkt eine Zentripetalkraft
Im rotierenden Bezugssystem ist Kugel in Ruhe !
Im rotierenden Bezugssystem wirkt eine Scheinkraft, die
Zentripetalkraft genau kompensiert
Scheinkraft, die unabhängig von der Geschwindigkeit des
Objektes im rotierenden Bezugssystem ist.
4.12 Beobachtung im rotierenden Bezugssystem
Beschreibung eines rotierenden
Massenpunktes in ruhendem
Inertialsystem x-y-z
Geschwindigkeit
des Massenpunktes
r
r
r
vin = ωin × rin
Beschreibung des Massenpunktes
im mitrotierenden System x*-y*-z*
(gleicher Ursprung, z=z*)
Im System
r
r
r
r
x*-y*-z* ist der Massenpunkt in Ruhe: v rot = 0 = vin − ωin × rin
Es gilt allgemein die Transformation:
r
r
r
r r ∂ rrot r r
v rot = vin − ω × rin =
− ω × rrot
∂t
Änderung des Ortsvektors
bezogen auf statisches
Koordinatensystem
Änderung des Ortsvektors
aufgrund der Variation der
Basisvektoren im
rotierenden Bezugssystem
53
4.12 Scheinkräfte in rotierendem Bezugssystem
r
∂v rot r r
r
a rot =
− ω × v rot
∂t
r r
r r r
r
= ain − 2(ω × v rot ) − ω × (ω × rrot )
Für Beschleunigung gilt
die analoge Beziehung
Umformen liefert
r
a rot
r
r
r r
r r r
r
Frot = ma rot = Fin − 2m(ω × v rot ) − mω × (ω × rrot )
Corioliskraft
Zentrifugalkraft
Geschwindigkeitsabhängig
Ortsabhängig
Senkrecht zur Geschwindigkeit
Parallel zum Ortsvektor
Verschwindet für Bewegungen
parallel zur Drehachse
4.13 Foucaultsches Pendel
r r
Nach der Zeit ∆t: s = v ∆t
r
r
r
r
v
aC
d = 12 aC ∆ t 2
r
d
r
s
mit Coriolisbeschleunigung:
r r
r
a C = 2 ( v × ω ) = 2vω sin α Breite
r
d = 12 ( 2vω sin α Breite ) ∆ t 2
Ablenkwinkel:
∆ϕ ≈
d v ω sin α Breite ∆t 2
=
s
v ∆t
Winkelgeschwindigkeit der
Pendeldrehung:
ωP =
∆ϕ
= ω ⋅ sin α Breite
∆t
54
4.13 Prinzipien der Mechanik
“It is increasingly clear that the symmetry group of nature is the deepest
thing that we understand about nature today.”
Steven Weinberg
Erhaltungssätze (abgeschlossenes System ohne äußere Kräfte)
Energieerhaltung
Impulserhaltung
Drehimpulserhaltung
∑ (E + E ) = konstant
r
∑ p = konstant
r
∑ L = konstant
i
pot
i
kin
i
i
i
i
i
Erhaltungssätze sind mit grundlegenden Symmetrien der
„Natur“ verknüpft
→ Symmetrien in der Natur
Die Verknüpfung von Erhaltungssätzen und Symmetrien geschieht
durch das Noether-Theorem
Zur Verknüpfung von Erhaltungssätzen und Symmetrien wird ein
Extremalprinzip benötigt
→ Prinzip der kleinsten Wirkung
4.13 Das Prinzip der kleinsten Wirkung
Was ist eine Wirkung ?
t2
Definition:
S = ∫ (Ekin (t ) − E pot (t ))dt
t1
Einheit:
[S ] = Js
Maß der Veränderung
engl. action → Hollywood
Es gibt eine kleinste Wirkung: Wirkungsquantum
h = 1.054 ⋅ 10 −34 Js
Wirkung beim freien Fall:
Masse 1kg
E pot = m g h
Das Prinzip der kleinsten Wirkung
Die Wirkung wird minimal für die tatsächliche Trajektorie
55
4.13 Impulserhaltung
Kräftefreie Bewegung eines Teilchens
von 1 nach 3 via 2
Symmetrie: Invarianz gegen Verschiebung a
∆a S = S123 − S1*2*3* ≡ 0
Wirkung:
1 ( x − x1 ) 1 ( x3 − x 2 )
S123 = m 2
+ m
(t2 − t1 ) 2 (t3 − t2 )
2
2
2
Festhalten von Punkt 1 und 3
Variation von Punkt 2 um
dx2
Prinzip der kleinsten Wirkung:
∆a S = ∆S11* + ∆S 22* + ∆S 33* = ∆S11* +
∆S11* = − ∆S 33* ⇒
dS123
dS
= − 123
dx1
dx3
dS123
=0
dx2
dS123
a + ∆S 33* = ∆S11* + ∆S 33*
dx2
(x − x1 ) = m ( x3 − x2 )
⇒ m 2
(t3 − t2 )
(t2 − t1 )
Impulserhaltung
4.13 Erhaltungssätze in der Physik
Die Erhaltungssätze folgen aus den Symmetrien von Zeit und Raum, also
ihrer Homogenität und Isotropie
Erhaltungssätze sind Folgen von Invarianzeigenschaften
Invarianz bei:
Translationen im Raum
Drehung im Raum
Zeittranslationen
→
→
→
Impulserhaltung
Drehimpulserhaltung
Energieerhaltung
Galileotransformation
Lorentztransformation
→
→
Schwerpunktsgeschwindigkeit
Energie-Impulstensor
Eichtransformationen
→
Ladungserhaltung
(elektrisch, stark, schwach)
56
4.16 Weiterführende Literatur
Brownsche Motoren
R.D. Astumina, Scientific American July (2001) 57
Satelliten-Gravimetrie
„GRACE Measurements of Mass Variability in the Earth System“
B. D. Tapley et al., Science 305 (2004) 503
Dreikörperproblem
M.C. Gutzwiler, „Moon-Earth-Sun: The oldest three-body problem“,
Rev.Mod. Phys. 70 (1998) 589
P. Hut, J.N. Bahcall, „Binary-single star scattering“
Astrophysical Journal, 268 (1983) 319
van der Waals Kräfte
E. Arzt et al., „From micro to nano contacts in biological
attachment devices“, Proc. Nat. Acad. Sci. 100 (2003) 10603
Corioliskraft:
www.kidsnewsroom.org/elmer/infocentral/frameset/meterology/Bad/BadCoriolis.html
www.physics.ohio-state.edu/~dvandom/Edu/index.html
57