Friedrich-Schiller-Universität Jena Mathematisches Institut
Werbung

Friedrich-Schiller-Universität Jena
Mathematisches Institut
GEOMETRIE1
Prof. E. Hertel
1
Skript zur Grundvorlesung im Hauptstudium (WS 2004/2005)
INHALTSVERZEICHNIS
1
Inhaltsverzeichnis
1 Einleitung
1.1 Bemerkungen zur Geschichte der Geometrie . . . . . . . . . .
1.2 Aufgaben und Bedeutung der Geometrie . . . . . . . . . . . .
3
3
4
2 Axiomatischer Aufbau der Geometrie
2.1 Axiomatische Methode . . . . . . . . . . . . . . . . . . . . . .
2.2 Inzidenzebenen . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.1 Inzidenzstrukturen . . . . . . . . . . . . . . . . . . . .
2.2.2 Affine Inzidenzebenen . . . . . . . . . . . . . . . . . .
2.2.3 Koordinateneinführung . . . . . . . . . . . . . . . . . .
2.2.4 Projektive Inzidenzebenen . . . . . . . . . . . . . . . .
2.3 Axiomatischer Aufbau der euklidischen Geometrie des Raumes
2.3.1 Inzidenzaxiome . . . . . . . . . . . . . . . . . . . . . .
2.3.2 Anordnungsaxiome . . . . . . . . . . . . . . . . . . . .
2.3.3 Kongruenzaxiome . . . . . . . . . . . . . . . . . . . . .
2.3.4 Stetigkeitsaxiome . . . . . . . . . . . . . . . . . . . . .
2.3.5 Parallelenaxiom und nichteuklidische Geometrie . . . .
2.4 Andere Aufbauarten der Geometrie . . . . . . . . . . . . . . .
5
5
6
6
6
8
11
13
14
15
17
21
22
23
3 Transformationen
3.1 Bewegungen in der Ebene . . .
3.2 Bewegungen im Raum (Skizze)
3.3 Ähnlichkeitsabbildungen . . . .
3.4 Affine Abbildungen der Ebene .
3.5 Erlanger Programm . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
24
24
27
29
30
31
4 Darstellende Geometrie
4.1 Parallelprojektion . . . . . . . . . . . . . . .
4.2 Normalprojektion (Eintafelprojektion) . . .
4.3 Zweitafelprojektion . . . . . . . . . . . . . .
4.4 Durchdringungen . . . . . . . . . . . . . . .
4.5 Axonometrie . . . . . . . . . . . . . . . . .
4.5.1 Grundlagen . . . . . . . . . . . . . .
4.5.2 Normale Axonometrie . . . . . . . .
4.5.3 Schiefe Axonometrie . . . . . . . . .
4.6 Kreisaufgaben . . . . . . . . . . . . . . . . .
4.6.1 Grundlagen . . . . . . . . . . . . . .
4.6.2 Ellipsenkonstruktionen . . . . . . . .
4.6.3 Anwendungen (Kegel und Zylinder)
4.7 Zentralprojektion . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
33
34
35
36
39
41
41
41
43
44
44
46
49
50
Index
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
55
2
INHALTSVERZEICHNIS
3
1
Einleitung
1.1
Bemerkungen zur Geschichte der Geometrie
Anfänge geometrischen Denkens in der Steinzeit(Ornamentik: Bandkeramikund Schnurkeramik-Kultur; Grundrisse megalithischer Bauwerke - Stonehenge, 2. Jahrtausend v. Chr.).
Flächen- und Volumenberechnungen (Regeln, keine Beweise) in Mesopotamien und Ägypten ab 2. Jahrtausend v. Chr.
Papyrus Moskau (um 1800 v. Chr.): Aufgabensammlung - enthält als
Problem (Aufg. 14) ein Glanzstück altägyptischer Geometrie, die Volumenberechnung des Pyramidenstumpfes:
V = (a2 + b2 + ab)
h
3
entspricht
V =
√
h
(G + GD + D).
3
Papyrus Rhind (um 1650 v. Chr. von Schreiber A’h-mosè als (ältestes bekanntes) Lehrbuch der Mathematik verfaßt nach älterer Vorlage): Papyrusrolle 534 × 33 cm, beginnt mit den Worten: Genaues Rechnen. Einführung
in die Kenntnis aller existierenden Gegenstände und aller dunklen Geheimnisse...
Ältestes Dokument der Darstellenden Geometrie: Stadtplan von Nippur
(2. Jahrtausend v. Chr.) auf Tontafel in Hilprecht-Sammlung Jena.
Geometrie als systematische Wissenschaft (Voraussetzung - Behauptung
- Beweis) im antiken Griechenland:
• Thales von Milet (624? - 545?)
• Pythagoras von Samos (580? - 496?)
• Platon (427 - 347)
• Euklid (365? - 300?) ELEMENTE
• Archimedes von Syrakus (287? - 212)
Rom -Der einzige Beitrag, den die Römer zur Mathematikgeschichte geleistet haben, war der, daß ein römischer Soldat den Archimedes erschlagen
hat.1
1
H. Gericke, Mathematik in Antike und Orient, S. 164
4
1 EINLEITUNG
Marcus Vitruvius Pollio (Vitruv, um 84 v. Chr. geboren) De architectura libri decem.
Renaissance
Albrecht Dürer (1471 - 1528) Unterweisung der Messung mit dem Zirkel
und Richtscheit, Nürnberg 1525.
René Descartes (1596 - 1650) Discours de la méthode mit Anhang Géométrie,
1637.
Neuzeit
Gaspard Monge (1746 - 1818) Géométrie descriptive, Paris 1798.
Felix Klein (1849 - 1925) Vergleichende Betrachtungen über neuere geometrische Forschungen (Erlanger Programm, 1872).
David Hilbert (1862 - 1943) Grundlagen der Geometrie, Leipzig, 1899.
Teilgebiete der heutigen Geometrie: Algebraische Geometrie, Differentialgeometrie, Projektive Geometrie, Nichteuklidische Geometrie, Darstellende Geometrie, Analytische Geometrie, Konvexgeometrie, Integralgeometrie,
Stochastische Geometrie, Fraktalgeometrie, Diskrete Geometrie, Computergeometrie...
1.2
Aufgaben und Bedeutung der Geometrie
Grundaufgabe der Elementargeometrie: Orientierung in der realen Welt. Insbesondere Darstellende Geometrie als Grundlage für Technisches Zeichnen
(3-dim. Objekte möglichst maßgerecht und anschaulich in der Ebene darstellen), Landkartenentwürfe, Photogrammetrie, Anaglyphenbilder, Sonnenuhren, Malerei, Bühnenbilder, Architektur.
Bedeutung der Geometrie für den Computereinsatz: Computergrafik, automatische Bildverarbeitung, CAD/CAM.
Bedeutung der Geometrie als Unterrichtsfach in der Schule: Entwicklung
exakter Raumvorstellung und des räumlichen Denkens, Fähigkeiten und Fertigkeiten des exakten Zeichnens, Entwicklung abstrakten (mathematischen)
Denkens an anschaulichen Gegenständen.
5
2
Axiomatischer Aufbau der Geometrie
2.1
Axiomatische Methode
Axiomensystem besteht aus (undefinierten) Grundbegriffen (Grundobjekten,
Grundrelationen) und (unbewiesenen) Grundaussagen, den Axiomen.
Eine axiomatische Theorie entwickelt aus den Grundbegriffen durch Definieren neue abgeleitete Begriffe (Objekte, Relationen) und aus den Axiomen
durch logisches Schließen neue abgeleitete Aussagen (Sätze der Theorie).
Eigenschaften eines Axiomensystems Σ:
(I) Σ heißt (semantisch) widerspruchsfrei (konsistent), wenn ein Modell
für Σ existiert.
Nach Gödel2 ist für elementare Theorien (im Prädikatenkalkül der ersten Stufe formulierbar) die semantische Widerspruchsfreiheit äquivalent zur syntaktischen Widerspruchsfreiheit: Keine Aussage der Form p ∧ ¬p ist aus Σ herleitbar.
(II) Σ heißt unabhängig, wenn jedes einzelne Axiom aus Σ unabhängig ist. Ein Axiom A aus Σ heißt unabhängig, wenn das Axiomensystem
Σ \ {A} ∪ {¬A} widerspruchsfrei ist.
(III) Σ heißt vollständig, wenn für jede in Σ-Grundbegriffen formulierbare Aussage a gilt: a ist aus Σ herleitbar oder ¬a ist aus Σ herleitbar.
Beispiel eines Axiomensystems (Gruppentheorie):
Grundobjekte: Elemente einer Menge G,
Grundrelation: Abbildung ∗ von G × G in G (binäre Operation).
Axiome:
(G1) ∀a, b, c ∈ G a ∗ (b ∗ c) = (a ∗ b) ∗ c .
(G2) ∀a, b ∈ G ∃x ∈ G (a ∗ x = b).
(G3) ∀a, b ∈ G ∃y ∈ G (y ∗ a = b).
Dieses Axiomensystem ist konsistent und unabhängig, aber nicht vollständig.
2
Kurt Gödel, 1906 - 1978
6
2 AXIOMATISCHER AUFBAU DER GEOMETRIE
2.2
2.2.1
Inzidenzebenen
Inzidenzstrukturen
Definition 1. a) (P, B, I) heißt Inzidenzstruktur
(I01) P 6= ∅ (Menge von Punkten),
(I02) B 6= ∅ (Menge von Blöcken),
(I03) P ∩ B = ∅,
(I04) I ⊆ P × B (Inzidenzrelation).
:⇐⇒
b) (P, B, I) heißt Inzidenzraum :⇐⇒
(I0) (P, B, I) ist
Inzidenzstruktur,
(I1’) ∀x, y ∈ P x 6= y ⇒ ∃!!b ∈ B (x, b) ∈ I ∧ (y, b) ∈ I ,
(I2’) ∀b ∈ B |{x ∈ P : (x, b) ∈ I}| ≥ 2 .
Beispiele
Satz
gilt für die Menge
n 1. a) In jedem Inzidenzraum (R, B, I)o
G := g ⊆ R : ∃b ∈ B g = {x ∈ R : (x, b) ∈ I
⊆ 2R :
(I1) ∀x, y ∈ R (x 6= y =⇒ ∃!! g ∈ G (x ∈ g ∧ y ∈ g)) und
(I2) ∀g ∈ G (|g| ≥ 2).
b) Umgekehrt wird jede nichtleere Menge R mit ∅ 6= G ⊆ 2R und (I1),
(I2) zu einem Inzidenzraum (R, G, ∈).
2.2.2
Affine Inzidenzebenen
Definition 1. (P, G) heißt affine Inzidenzebene :⇐⇒
(I0) P Menge von Punkten A, B, C, ...,
G ⊆ 2P Menge von Geraden a, b, c, ...
(I1) Durch je zwei verschiedene Punkte geht genau eine Gerade.3
(I2) Jede Gerade enthält mindestens zwei Punkte.
(I3) Es gibt wenigstens drei Punkte, die nicht kollinear sind, d. h.:
∃A, B, C ∈ P ∀g ∈ G (A ∈ g ∧ B ∈ g =⇒ C 6∈ g).
(AP) Durch jeden Punkt geht zu jeder Geraden genau eine Parallele:
∀P ∈ P ∀g ∈ G ∃!! h ∈ G (P ∈ h ∧ h k g).4
Dabei gilt g k h :⇐⇒ g = h ∨ g ∩ h = ∅.
Hilfssatz 1. Die Parallelität k von Geraden ist eine Äquivalenzrelation
auf G.
3
Die durch zwei verschiedene Punkte A, B nach (I1) eindeutig bestimmte Gerade werde
durch g(AB) bezeichnet.
4
Affines Parallelenaxiom
2.2 Inzidenzebenen
7
Lemma. Das Axiomensystem für affine Inzidenzebenen ist widerspruchsfrei, nicht unabhängig und nicht vollständig.
Hilfssatz 2. Zwei verschiedene Geraden haben höchstens einen gemeinsamen Punkt.
Satz 1. Liegen auf einer Geraden einer affinen Inzidenzebene (P, G) genau n Punkte (n ∈ N), so heißt n Ordnung von (P, G), und es gilt
(a) ∀g ∈ G (|g| = n),
(b) ∀P ∈ P (|{g ∈ G : P ∈ g}| = n + 1),
(c) |P| = n2 ,
(d) |G| = n(n + 1).
Definition 2. a) (R, +, ·) heißt Ring :⇐⇒
(0) R Menge, +, · binäre Operationen auf R,
(R1) (R, +) ist abelsche Gruppe,
(R2) (R, ·) ist Halbgruppe,
(R3) ∀a, b, c ∈ R a · (b + c) = a · b + a · c ∧ (a + b) · c = a · c + b · c .5
b) (K, +, ·) heißt Schiefkörper :⇐⇒
(S1) (K, +, ·) ist ein Ring,
(S2) (K∗ , ·) ist eine Gruppe mit K∗ := K \ {n} und n Nullel. in (K, +).
c) (K, +, ·) heißt Körper :⇐⇒
(K1) (K, +, ·) ist ein Schiefkörper,
(K2) · ist kommutativ.
Beispiele, Quaternionen
Satz 2. Für Schiefkörper K wird mit
n
PK := K×K, GK := g ⊆ PK : g = g(m, n) ∨ g = g(n)
∧ m, n ∈ K
für g(m, n) := {(x, y) ∈ PK : y = mx + n}, g(n) := {(x, y) ∈ PK : x = n}
A(K2 ) = (PK , GK )
eine affine Inzidenzebene, die affine Koordinatenebene des Schiefkörpers K.
5
Die Multiplikation ist links- und rechtsseitig distributiv bezüglich der Addition.
o
8
2 AXIOMATISCHER AUFBAU DER GEOMETRIE
2.2.3
Koordinateneinführung
Ziel: Einführung einer Koordinatenmenge k und geeigneter Operationen +
und · in einer affinen Inzidenzebene (P, G), so daß (k, +, ·) ein Schiefkörper
und die zugehörige Koordinatenebene (Pk , Gk ) isomorph zur Ausgangsebene
(P, G) wird.
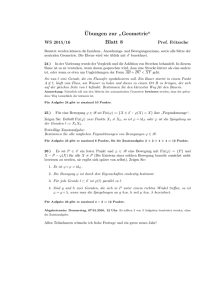
In der affinen Inzidenzebene (P, G) werden nach Axiom (I3) drei nichtkollineare Punkte O, E, E 0 ∈ P gewählt. Nach (I1) werden die Koordinatengerade k := g(OE), die Gerade k0 := g(OE 0 ) 6= k und die Parallele k+
durch E 0 zu k gebildet. Zur Addition von Punkten X, Y ∈ k wird die Park0
E0
X+
k+
k
O
E
X
Y
Z =X +Y
Abbildung 1: Koordinatenaddition
allele durch X zu k0 mit k+ geschnitten. Durch den Schnittpunkt X+ wird
eine Parallele zu g(E 0 Y ) konstruiert. Der Schnittpunkt dieser Parallelen mit
der Koordinatengeraden k liefert den Punkt Z =: X + Y , der als Summe
der Punkte X und Y aufgefaßt wird (vgl. Abb. 1). Die Konstruktionen sind
eindeutig. Damit das Ergebnis Z unabhängig von der Auswahl des Punktes
E0 ∈
/ k ist, muß eine zusätzliche Eigenschaft gelten, das affine Axiom von
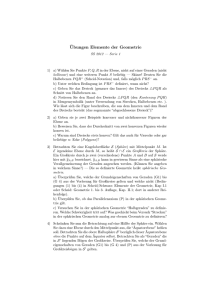
Desargues 6 (Vgl. Abb. 2.):
(AD) Sind g1 , g2 , g3 ∈ G drei paarweise verschiedene Geraden mit einem
gemeinsamen Punkt Z ∈ P und Ai , A0i ∈ gi (i = 1, 2, 3) sechs paarweise
verschiedene Punkte, so gilt
g(A1 A2 ) k g(A01 A02 ) ∧ g(A1 A3 ) k g(A01 A03 ) =⇒ g(A2 A3 ) k g(A02 A03 ).
Definition 1. Eine affine Inzidenzebene, in der (AD) gilt, heißt desarguessch.
6
Girard Desargues, 1591 - 1661
2.2 Inzidenzebenen
9
Bemerkung: In jeder affinen Koordinatenebene gilt (AD).
A02
g2
A2
A01
A1
g1
Z
A3
A03
g3
Abbildung 2: Axiom von Desargues
Kleines affines Axiom von Desargues, Umkehrung von (AD), Scherensatz.
Hilfssatz 1. In desarguesschen affinen Ebenen ist (k, +) eine Gruppe.
k0
X0
E0
k
O
E
X
Y
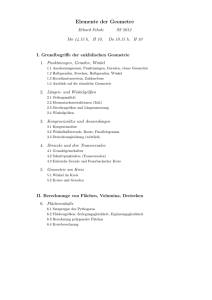
Z =X ·Y
Abbildung 3: Koordinatenmultiplikation
Zur Multiplikation von Punkten X, Y ∈ k wird die Parallele durch X zu
g(EE 0 ) mit k0 geschnitten. Durch den Schnittpunkt X 0 wird eine Parallele
10
2 AXIOMATISCHER AUFBAU DER GEOMETRIE
zu g(Y E 0 ) konstruiert, die k in dem Punkt Z =: X · Y schneidet, der als
Produkt der Punkte X und Y aufgefaßt wird (vgl. Abb. 3).
pe.
Hilfssatz 2. In desarguesschen affinen Ebenen ist (k \ {O}, ·) eine GrupLemma 1. (K, +, ·) ist genau dann ein Schiefkörper, wenn gilt
(1) (K, +) ist Gruppe,
(2) (K∗ , ·) ist Gruppe,
(3) · ist beidseitig distributiv.
Satz 1. Die Menge k der Punkte auf jeder Koordinatengeraden einer desarguesschen affinen Inzidenzebene wird mit den (geometrisch) eingeführten
Operationen + und · zu einem Schiefkörper.
Satz von Wedderburn.7 Jeder endliche Schiefkörper ist ein Körper.
Folglich wird die Koordinatenstruktur (k, +, ·) für endliche desarguessche
affine Inzidenzebenen sogar ein Körper. Für unendliche affine Inzidenzebenen
muß dazu eine zusätzliche Eigenschaft gelten, das affine Axiom von Pappos
(vgl. Abb. 4).8
A4
A6
g2
A2
A1
A3
g1
A5
Abbildung 4: Axiom von Pappos
(APP) Sind A1 , ..., A6 Punkte einer affinen Inzidenzebene, die abwechselnd auf zwei verschiedenen Geraden liegen, so gilt
g(A1 A2 ) k g(A4 A5 ) ∧ g(A2 A3 ) k g(A5 A6 ) =⇒ g(A3 A4 ) k g(A6 A1 ).
7
8
Joseph Henry Maclagan Wedderburn, 1882 - 1948
Pappos von Alexandria, um 320 nach Chr.
2.2 Inzidenzebenen
11
(Liegen die Ecken eines Sechsseites abwechselnd auf zwei verschiedenen Geraden, so
folgt aus der Parallelität zweier Gegenseitenpaare auch die Parallelität des dritten
Gegenseitenpaares.)
Definition 2. Eine affine Inzidenzebene, in der (APP) gilt, heißt pappossch.
Satz 2. Die Menge k der Punkte auf jeder Koordinatengeraden einer
papposschen affinen Inzidenzebene wird mit den geometrisch eingeführten
Operationen + und · zu einem Körper.
Lemma 2. (Darstellungssatz) Ist (K, +, ·) ein zum Koordinatenschiefkörper (k, +, ·) einer desarguesschen affinen Inzidenzebene (P, G) isomorpher
Schiefkörper, so ist (P, G) isomorph zur affinen Koordinatenebene A(K2 ).
Bemerkungen: 1. Ein Schiefkörper K ist genau dann ein Körper, wenn
die affine Koordinatenebene A(K2 ) pappossch ist.
2. Jede endliche desarguessche affine Inzidenzebene ist pappossch.
3. Zu jeder Primzahl p und jeder natürlichen Zahl m ≥ 1 existiert eine (desarguessche bzw. pappossche) affine Inzidenzebene der Ordnung pm .
4. Eine wichtige andere Methode der Algebraisierung affiner Inzidenzebenen benutzt Transformationen (Automorphismen) der affinen Inzidenzebene
(Kollineationen, Dilatationen, Streckungen, Translationen).
2.2.4
Projektive Inzidenzebenen
Definition 1. (P, G) heißt projektive Inzidenzebene :⇐⇒
(I0) P Menge von Punkten A, B, C, ...,
G ⊆ 2P Menge von Geraden a, b, c, ...
(I1) ∀A, B ∈ P (A 6= B =⇒ ∃!!g ∈ G (A, B ∈ g)),
(I2’) ∀g ∈ G (|g| ≥ 3),
(I3) ∃A, B, C ∈ P (A, B, C nicht kollinear),
(PP) ∀g, h ∈ G (g ∩ h 6= ∅).
Hilfssatz 1. Das „projektive Parallelenaxiom“ (PP) ist äquivalent zu
(PP’) ∀g, h ∈ G ∃!!P ∈ P (g 6= h =⇒ g ∩ h = {P }).
Lemma 1. Zu jeder affinen Inzidenzebene existiert bis auf Isomorphie
genau eine projektive Inzidenzebene als projektiver Abschluß, und aus jeder
projektiven Inzidenzebene entsteht durch Weglassen einer Geraden eine affine Inzidenzebene.
12
2 AXIOMATISCHER AUFBAU DER GEOMETRIE
Beispiel: 7-Punkte-Ebene.
Satz 1. Liegen auf einer Geraden einer projektiven Inzidenzebene (P, G)
genau n + 1 Punkte (n ∈ N), so heißt n Ordnung von (P, G), und es gilt
(a) ∀g ∈ G (|g| = n + 1),
(b) ∀P ∈ P (|{g ∈ G : P ∈ g}| = n + 1),
(c) |P| = |G| = n2 + n + 1.
Bemerkungen:
1. Zu jedem Körper der Ordnung n existiert eine projektive Inzidenzebene
der Ordnung n.
2. Dualitätsprinzip: Werden in einem wahren Satz der ebenen projektiven Geometrie die Begriffe Punkt und Gerade vertauscht (und entsprechend
die Relationen liegt auf mit geht durch), so entsteht wieder ein wahrer Satz
der projektiven Geometrie .
3. Projektiver Satz von Desargues: Aus
(1) 6 Punkte Ai , A0i ∈ gi (i = 1, 2, 3) und
(2) g1 ∩ g2 ∩ g3 = S
folgt
Si := Aj Ak ∩ A0j A0k ∈ z (i = 1, 2, 3).
hS2
g1
A1
S
h
h
t
t
A01
z
A02
A2
t
g2
t
t
t A03
A3
hS1
Abbildung 5: Projektiver Satz von Desargues
g3
2.3 Axiomatischer Aufbau der euklidischen Geometrie des Raumes
13
4. Dualisierung des projektiven Satzes von Desargues: Aus
(1∗ ) 6 Geraden ai , a0i Gi (i = 1, 2, 3) und
(2∗ ) G1 , G2 , G3 ∈ s folgt
si := g(aj ∩ ak , a0j ∩ a0k ) Z (i 6= j 6= k; i = 1, 2, 3)
tG2
s1
G3
t
a03
a3
Z
a02
a2
s2
h
s
a01
s3
a1
t
G1
Abbildung 6: Dualisierung des projektiven Satzes von Desargues
2.3
Axiomatischer Aufbau der euklidischen Geometrie des
Raumes
Grundobjekte:
Menge P von Punkten A, B, ...,
Menge G von Geraden a, b, ..., g, ... mit G ⊆ 2P und eine
Menge E von Ebenen α, ..., ε, ... mit E ⊆ 2P .
Grundrelationen:
Inzidenz P ∈ g, P ∈ ε, g ⊆ ε,
Zwischenrelation zw für Punkte und
Kongruenz ∼
= von Strecken und Winkeln.
Die Axiome werden in 5 Axiomengruppen eingeteilt (Inzidenzaxiome,
Anordnungs-, Kongruenz-, Stetigkeitsaxiome und das Parallelenaxiom):
14
2 AXIOMATISCHER AUFBAU DER GEOMETRIE
2.3.1
Inzidenzaxiome
(I1) ∀A, B ∈ P A 6= B =⇒ ∃!!g ∈ G(A ∈ g ∧ B ∈ g)
Durch je zwei verschiedene Punkte A, B geht genau eine Gerade g =: g(AB).
(I2) ∀g ∈ G |g| ≥ 2
Jede Gerade enthält wenigstens zwei Punkte.
(I3) ∃A, B, C ∈ P A, B, C nicht kollinear
Es existieren wenigstens drei Punkte, die nicht auf derselben Geraden liegen.
(I4) ∀A, B, C ∈ P A, B, C nicht kollinear
=⇒
=⇒ ∃!! ε ∈ E (A ∈ ε ∧ B ∈ ε ∧ C ∈ ε)
Durch 3 nichtkollineare Punkte A, B, C geht genau eine Ebene ε =: ε(ABC).
(I5) ∀ε ∈ E∃A ∈ P A ∈ ε
Jede Ebene enthält wenigstens einen Punkt.
(I6) ∀A, B ∈ P ∀ε ∈ E A 6= B ∧ A, B ∈ ε =⇒ g(AB) ⊆ ε
Liegen zwei verschiedene Punkte A, B in derselben Ebene, so liegt die ganze
Gerade durch A und B in dieser Ebene.
(I7) ∀α, β ∈ E ∀P ∈ P P ∈ α ∩ β =⇒ ∃ Q ∈ P\{P } (Q ∈ α ∩ β)
Zwei Ebenen mit einem gemeinsamen Punkt P enthalten mindestens einen
weiteren gemeinsamen Punkt Q.
(I8) ∃A, B, C, D ∈ P @ε ∈ E A, B, C, D ∈ ε
Es existieren wenigstens vier Punkte, die nicht komplanar sind (nicht in
derselben Ebene liegen).
Satz 1. a) ∀g, h ∈ G (g 6= h ⇒ g ∩ h = ∅ ∨˙ g ∩ h ∈ P).9
b) ∀α, β ∈ E (α 6= β ⇒ α ∩ β = ∅ ∨˙ α ∩ β ∈ G).
c) ∀g ∈ G ∀ε ∈ E (g ⊆ ε ∨˙ g ∩ ε = ∅ ∨˙ g ∩ ε ∈ P).
d) ∀P ∈ P ∀g ∈ G P 6∈ g =⇒ ∃!! ε ∈ E(P ∈ ε ∧ g ⊆ ε) .10
e) ∀g, h ∈ G g ∩ h ∈ P =⇒ ∃!! ε ∈ E(g ⊆ ε ∧ h ⊆ ε) . 11
9
∨˙ : entweder...oder
Bezeichnung: ε(P, g)
11
Bezeichnung: ε(g, h)
10
2.3 Axiomatischer Aufbau der euklidischen Geometrie des Raumes
15
Definition 1. a) Zwei Geraden g, h heißen parallel
g k h :⇐⇒ g = h ∨ ∃ε ∈ E (g, h ⊆ ε ∧ g ∩ h = ∅).
b) Eine Gerade g und eine Ebene ε heißen parallel
g k ε :⇔ g ⊆ ε ∨ g ∩ ε = ∅.
c) Zwei Ebenen α, β heißen parallel
αkβ
:⇐⇒ α = β
d) Zwei Geraden g, h heißen windschief
∨ α ∩ β = ∅.
:⇔ g 6k h ∧ g ∩ h = ∅.
Hilfssatz 1. a) Es gibt mindestens 4 Punkte, 6 Geraden und 4 Ebenen.
b) Jede Ebene enthält mindestens 3 nichtkollineare Punkte.
c) Zu je zwei verschiedenen parallelen Geraden g, h existiert genau eine Ebene ε, die diese beiden Geraden enthält.12
d) Es gibt windschiefe Geraden.
2.3.2
Anordnungsaxiome
(A1) ∀A, B, C ∈ P zw(ABC) =⇒ A 6=B 6= C 6= A ∧
∧ ∃ g ∈ G (A, B, C ∈ g) ∧ zw(CBA)
Liegt der Punkt B zwischen den Punkten A und C, so sind A, B, C paarweise verschieden und kollinear, und B liegt auch zwischen C und A.
(A2) ∀g ∈ G ∀ A, B ∈ g A 6= B =⇒ ∃ C ∈ g (zw(ABC) )
Zu je zwei verschiedenen Punkten A, B einer Geraden g existiert auf g mindestens ein weiterer Punkt C, so daß B zwischen A und C liegt.
(A3) ∀g ∈ G ∀ A, B, C ∈ g zw(ABC) =⇒ ¬zw(ACB) ∧ ¬zw(BAC)
Von drei Punkten einer Geraden liegt höchstens einer zwischen den beiden
anderen.
(A4) ∀A, B, C ∈ P nicht kollinear ∀ g ∈ G g ⊆ ε(ABC) ∧
∧ {A, B, C} ∩ g = ∅ ∧ ∃ P ∈ g zw(AP B) =⇒
∃ Q ∈ g zw(AQC) ∨˙ zw(BQC)
Axiom von PASCH: Liegt eine Gerade g in der durch drei nichtkollineare
Punkte A, B, C eindeutig bestimmten Ebene, ohne einen der Punkte A, B, C
zu enthalten, so folgt aus der Existenz eines Punktes von g, der zwischen A
und B liegt, auch die Existenz eines Punktes von g, der entweder zwischen
A und C oder zwischen B und C liegt.13
12
13
Bezeichnung: ε = ε(g k h)
Moritz Pasch, 1843 - 1930
16
2 AXIOMATISCHER AUFBAU DER GEOMETRIE
Satz 1. Für alle Punkte
D ∈ P gilt
A, B, C, a) A 6= B =⇒ ∃Z ∈ P zw(AZB) ,
b) zw(ABC) ∧ zw(BCD) =⇒ zw(ABD) ∧ zw(ACD),
c) zw(ABC) ∧ zw(ACD) =⇒ zw(ABD) ∧ zw(BCD).
Folgerungen: a) Von 3 paarweise verschiedenen Punkten einer Geraden
liegt stets genau einer zwischen den beiden anderen.
b) Auf jeder Geraden g(AB) existieren mindestens abzählbar unendlich viele
Punkte Z mit zw(AZB) und mindestens abzählbar unendlich viele Punkte
C mit zw(ABC).
Definition 1. Es sei g eine Gerade, die in einer Ebene ε liegt (g ⊆ ε)
und ε0 := ε \ g. Zwei Punkte A, B ∈ ε0 liegen auf derselben Seite von der
Geraden g
A ∼ B :⇐⇒ @Z ∈ g zw(AZB) .
g
Satz 2. ∼ ist eine Äquivalenzrelation auf ε0 , die ε0 in genau zwei Klassen
g
zerlegt.
Definition 2. a) AB heißt Strecke mit den Endpunkten A, B
(
{A}
für A=B
AB =
{Z : zw(AZB)} ∪ {A, B} sonst.
:⇐⇒
b) Für zwei verschiedene Punkte A, B heißt AB + Strahl mit dem Anfangspunkt A (in Richtung B) :⇐⇒
AB + = {X : zw(AXB)
∨ zw(ABX)} ∪ {A, B}.
c) Die beiden nach Satz 2 durch eine Gerade g = g(AB) einer Ebene ε =
ε(ABC) eindeutig bestimmten Äquivalenzklassen von ε0 = ε \ g heißen die
beiden Seiten der Geraden g in ε oder offene Halbebenen von ε mit der
gemeinsamen Randgeraden g.
ABC + := {X ∈ ε : X ∼ C} ∪ g(AB) und ABC − := (ε \ ABC + ) ∪ g(AB)
g
sind die zugehörigen (abgeschlossenen) Halbebenen.
d) Eine Teilmenge f einer Ebene ε = ε(ABC) heißt Fahne mit dem Anfangspunkt A und dem Randstrahl AB + bzw AB − :⇐⇒
f = AB + C + := AB + ∪ (ABC + \ g(AB)) ∨
f = AB + C − := AB + ∪ (ABC − \ g(AB)) ∨
f = AB − C + := AB − ∪ (ABC + \ g(AB)) ∨
f = AB − C − := AB − ∪ (ABC − \ g(AB)).
2.3 Axiomatischer Aufbau der euklidischen Geometrie des Raumes
17
e) Eine Zweiermenge ^(h, k) = ^(ASB) := {h, k} von zwei Strahlen h =
SA+ und k = SB + mit gemeinsamem Anfangspunkt S, dem Scheitel, heißt
Elementarwinkel - im folgenden auch kurz Winkel.
f) Eine Punktmenge K ⊆ P heißt konvex, wenn sie mit je zwei Punkten A, B
auch stets die ganze Strecke AB enthält.
Bemerkungen: Halbraum, (räumliche) Orientierungsfigur, Streckenzug,
Polygon, Polyeder, Winkel erster und zweiter Art.
2.3.3
Kongruenzaxiome
(K1) ∀A, B, C, D ∈ P A 6= B ∧ C 6= D =⇒ =⇒ ∃ E ∈ P ( zw(CDE) ∧ AB ∼
= DE)
(Möglichkeit der Streckenabtragung).
(K2) ∀Ai , Bi ∈ P A1 B1 ∼
= A3 B3 ∧ A2 B2 ∼
= A3 B3 =⇒ A1 B1 ∼
= A2 B2
(Transitivität der Streckenkongruenz).
∼
(K3) ∀Ai , Bi , Ci ∈ P zw(A1 B1 C1 ) ∧ zw(A
2 B2 C2 ) ∧ A1 B1 = A2 B2 ∧
∼
∼
∧ B1 C1 = B2 C2 =⇒ A1 C1 = A2 C2
(Addierbarkeit von Strecken).
(K4) ∀^(A0 S 0 B 0 )∀S, A, P ∈ P nicht kollinear ∃!! SB + B ∈ SAP + ∧
∧ ^(ASB) ∼
= ^(A0 S 0 B 0 )
(Möglichkeit der eindeutigen Winkelabtragung).
(K5) ∀^(ABC) ^(ABC) ∼
= ^(ABC)
(Reflexivität der Winkelkongruenz).
(K6) ∀4Ai Bi Ci A1 B1 ∼
= A2 B2 ∧ A1 C1 ∼
= A2 C2 ∧
∼
∧ ^(B1 A1 C1 ) = ^(B2 A2 C2 ) =⇒ ^(A1 B1 C1 ) ∼
= ^(A2 B2 C2 )
(Dreieckskongruenzaxiom).
Unmittelbare Folgerungen aus den Axiomen:
(I) Die Sreckenkongruenz ist eine Äquivalenzrelation über der Menge aller Strecken.
(II) Die Streckenabtragung ist eindeutig, d. h.:
(K1’) ∀A, B, C, D ∈ P A 6= B ∧ C 6= D =⇒ =⇒ ∃!! E ∈ P(zw(CDE) ∧ DE ∼
= AB)
18
2 AXIOMATISCHER AUFBAU DER GEOMETRIE
Definition 1. a) Eine Menge 4ABC = {A, B, C} von drei nicht kollinearen Punkten A, B, C heißt Dreieck mit den Ecken A, B, C, den Seiten
AB, BC, CA, den Innenwinkeln ^(ABC), ^(BAC), ^(ACB) und der Dreiecksfläche ABC + ∩ ACB + ∩ BCA+ .
b) Zwei Dreiecke 4ABC und 4A0 B 0 C 0 heißen kongruent (4ABC ∼
= 4A0 B 0 C 0 ),
wenn bei geeigneter Bezeichnung der Eckpunkte gilt:
AB ∼
= A0 B 0 ∧ AC ∼
= A0 C 0 ∧ BC ∼
= B0C 0 ∧
0
0
0
0
0
0
∼
∼
^(ABC) = ^(A B C ) ∧ ^(BAC) = ^(B A C ) ∧ ^(CBA) ∼
= ^(C 0 B 0 A0 ).
Satz 1. „Erster Kongruenzsatz für Dreiecke“ (sws) Wenn für Dreiecke
4ABC und 4A0 B 0 C 0 gilt AB ∼
= A0 B 0 , AC ∼
= A0 C 0 und ^(BAC) ∼
= ^(B 0 A0 C 0 ),
so sind die Dreiecke kongruent.
Korollar. „Zweiter Kongruenzsatz für Dreiecke“ (wsw) Wenn für Dreiecke 4ABC und 4A0 B 0 C 0 gilt AB ∼
= A0 B 0 , ^(BAC) ∼
= ^(B 0 A0 C 0 ) und
^(ABC) ∼
= ^(A0 B 0 C 0 ), so sind die Dreiecke kongruent.
Definition 2. a) Die Strecke AB heißt kleiner als die Strecke CD
AB < CD
:⇐⇒ ∃P ∈ P zw(CP D) ∧ AB ∼
= CP .
b) Der Winkel ^(h0 , k) heißt Nebenwinkel des Winkels ^(h, k), wenn h0 ∪ h
eine Gerade ist.
c) Der Winkel ^(h0 , k0 ) heißt Scheitelwinkel zu ^(h, k), wenn ^(h0 , k) Nebenwinkel von ^(h, k) und ^(k0 , h) Nebenwinkel von ^(k, h) ist.
d) Die Nebenwinkel der Innenwinkel eines Dreiecks 4 heißen Außenwinkel
von 4.
e) Ein Winkel heißt rechter Winkel, wenn er zu einem seiner Nebenwinkel
kongruent ist.
f) Ein Winkel ^(BAD) heißt kleiner als der Winkel ^(BAC)
^(BAD) < ^(BAC) :⇐⇒
(
AC + = AB −
∨ D ∈ ABC +
∧ D 6∈ g(AB) ∧ ∃E ∈ AD + zw(BEC) .
Ein Winkel ^(BAD) heißt kleiner als der Winkel ^(P QR), wenn ein zu
^(P QR) kongruenter Winkel ^(BAC) existiert mit ^(BAD) < ^(BAC).
g) Ein Winkel ^(h, k) heißt spitzer (stumpfer) Winkel, wenn ^(h, k) kleiner
(größer) als ein rechter Winkel ist.
h) Ein Winkel ^(h, k) heißt gestreckter Winkel, wenn h ∪ k eine Gerade ist.
Hilfssatz 1. Aus der Kongruenz zweier Winkel folgt die Kongruenz ihrer
Nebenwinkel.
2.3 Axiomatischer Aufbau der euklidischen Geometrie des Raumes
19
Hilfssatz 2. (Addierbarkeit von Winkeln) Unter den Voraussetzungen
(1) h, k, l sind paarweise verschiedene Strahlen derselben Ebene mit
dem gemeinsamen Anfangspunkt O,
(2) h0 , k0 , l0 sind paarweise verschiedene Strahlen derselben Ebene mit
dem gemeinsamen Anfangspunkt O0 ,
(3) k, l und k0 , l0 liegen jeweils entweder zugleich auf derselben oder auf
verschiedenen Seiten der Trägergeraden des Strahls h bzw. h0 und
(4) ^(l, h) ∼
= ^(l0 , h0 ) ∧ ^(h, k) ∼
= ^(h0 , k0 )
gilt stets auch ^(l, k) ∼
= ^(l0 , k0 ).
Weitere Folgerungen:
(III) Die beiden zu einem Winkel bildbaren Nebenwinkel sind kongruent.
(IV) Ist ^(h0 , k0 ) Scheitelwinkel zu ^(h, k), so gilt: ^(h0 , k0 ) ∼
= ^(h, k)
(Scheitelwinkel sind kongruent) .
(V) Es existieren rechte Winkel.
Definition 3. Ein Dreieck mit zwei zueinander kongruenten Seiten heißt
gleichschenklig.
Hilfssatz 3. (Satz vom gleichschenkligen Dreieck) Ein Dreieck 4ABC ist
genau dann gleichschenklig mit AC ∼
= BC, wenn gilt ^(CAB) ∼
= ^(CBA).
Korollar. (Satz vom Drachenviereck) Liegen die Punkte C, D auf verschiedenen Seiten der Geraden g(AB) mit CA ∼
= DA und CB ∼
= DB, so gilt
∼
∼
^(CAB) = ^(DAB) und ^(CBA) = ^(DBA).
Satz 2. „Dritter Kongruenzsatz für Dreiecke“ (sss) Wenn für Dreiecke
4ABC und 4A0 B 0 C 0 gilt AB ∼
= A0 B 0 , AC ∼
= A0 C 0 und BC ∼
= B 0 C 0 , so sind
die Dreiecke kongruent.
Beweis: Für die Dreiecke 4ABC und 4A0 B 0 C 0 gelte
(1) AB ∼
= A0 B 0 ∧ AC ∼
= A0 C 0 ∧ BC ∼
= B 0C 0 .
Nach Satz 1 (sws) genügt der Nachweis der Kongruenz wenigstens eines
Winkels der beiden Dreiecke, etwa
(*) ^(B 0 A0 C 0 ) ∼
= ^(BAC).
Dazu werde ^(BAC) in A0 an A0 B 0 + nach beiden Seiten von g(A0 B 0 ) gemäß
(K4) angetragen:
+
(**) ^(B 0 A0 C0 ) ∼
= ^(BAC) ∧ C0 ∈ A0 B 0 C 0 ,
−
^(B 0 A0 C 00 ) ∼
= ^(BAC) ∧ C 00 ∈ A0 B 0 C 0 .
Dabei können C 0 und C 00 so gewählt werden, daß gilt
20
2 AXIOMATISCHER AUFBAU DER GEOMETRIE
C0
C0
C
A0
A
B
B0
C 00
Abbildung 7: Dritter Kongruenzsatz
(2) A0 C0 ∼
= AC
∧ A0 C 00 ∼
= AC, woraus nach Satz 1 (sws) folgt
4A0 B 0 C0 ∼
= 4ABC
∧
4 A0 B 0 C 00 ∼
= 4ABC,
also auch
(3) B 0 C0 ∼
= BC ∧ B 0 C 00 ∼
= BC, was mit (I) (Streckenkongruenz ist Äquivalenzrelation) auf
(4) B 0 C0 ∼
= B 0 C 00 führt. Ebenfalls mit (I) folgt aus (2)
0
∼
(5) A C0 = A0 C 00 .
Aus (4) und (5) folgt nach dem Korollar (Satz vom Drachenviereck) zu Hilfssatz 3 die Winkelkongruenz
(6) ^(B 0 A0 C0 ) ∼
= ^(B 0 A0 C 00 ).
Andererseits gilt wegen (1) A0 C 0 ∼
= AC und wegen (2) A0 C0 ∼
= AC nach (5)
mit (I) insgesamt
(7) A0 C 0 ∼
= A0 C 00 . Wegen (1) B 0 C 0 ∼
= BC und (3) B 0 C0 ∼
= BC ∧ B 0 C 00 ∼
= BC
ergibt sich mit (I) analog
(8) B 0 C 0 ∼
= B 0 C 00 . Die Kongruenzen (7) und (8) führen mit dem Satz vom
Drachenviereck auf
(6’) ^(B 0 A0 C 0 ) ∼
= ^(B 0 A0 C 00 ). Wegen der Eindeutigkeit der Winkelabtragung
(K4) folgt aus (6) und (6’) C 0 ∈ A0 C0+ . Da (5) und (7) auf A0 C 0 ∼
= A0 C0 führen, muß C 0 = C0 gelten, was mit (**) schließlich (*) liefert, q. e. d.
Weitere Folgerung:
(VI) Die Winkelkongruenz ist eine Äquivalenzrelation auf der Menge aller Winkel.
Satz 3. (Satz vom Außenwinkel) Jeder Außenwinkel eines Dreiecks ist
größer als jeder der beiden „nicht anliegenden“ Innenwinkel.
2.3 Axiomatischer Aufbau der euklidischen Geometrie des Raumes
21
Weitere Folgerungen:
(VII) Jedes Dreieck hat mindestens zwei spitze Innenwinkel.
(VIII) Der größeren Seite eines Dreiecks liegt stets der größere Winkel
„gegenüber“.
(IX) Jede Strecke AB mit A 6= B besitzt genau einen Mittelpunkt M mit
zw(AM B) ∧ AM ∼
= M B.
(X) Es existieren (nichtidentische) parallele Geraden:
∀g ∈ G ∀P ∈ P ∃h ∈ G (P ∈ h ∧ h k g).
(XI) Die Relation < ist eine irreflexive und transitive Relation in der
Menge aller Strecken bzw. Winkel.
(XII) Die „Summe“ zweier Innenwinkel eines Dreiecks ist kleiner als ein
gestreckter Winkel.
(XIII) Alle rechten Winkel sind zueinander kongruent.
(XIV) „Vierter Kongruenzsatz für Dreiecke“ (ssw) Wenn für Dreiecke
4ABC und 4A0 B 0 C 0 gilt AB ∼
= A0 B 0 , AC ∼
= A0 C 0 , AB < AC und
0
0
0
∼
^(ABC) = ^(A B C ), so sind die Dreiecke kongruent.
Abschließende Bemerkungen:
1. (S/∼
= , +, <) ist eine geordnete kommutative Halbgruppe mit Nullelement
und Kürzungsregel.
2. ϕ heißt Bewegung (ϕ ∈ B3 ) :⇐⇒
(1) ϕ ist Transformation
von P, (2) ∀A, B ∈ P AB ∼
= ϕ(A)ϕ(B) .
(B3 , ◦) ist Gruppe, die Bewegungsgruppe oder Gruppe der Kongruenztransformationen (des euklidischen Raumes).
2.3.4
Stetigkeitsaxiome
(S1) ∀A, B, C, D ∈ P A 6= B ∧ C 6= D
=⇒
∼
∃n ∈ N ∃A1 , ..., An ∈ g(AB) zw(A
i−1 Ai Ai+1 ) ∧ CD = Ai Ai+1 ∧ zw(ABAn )
(i = 0, ..., n − 1; A0 := A)
Archimedisches Axiom: Durch sukzessives Abtragen einer Strecke CD auf
einer Strecke AB von A aus in Richtung AB + wird nach endlich vielen
22
2 AXIOMATISCHER AUFBAU DER GEOMETRIE
Schritten der Punkt B übertroffen.
(S2) ∀λ ∈ R+ ∃ AB l(AB) = λ
Vollständigkeitsaxiom: Zu jeder nichtnegativen reellen Zahl λ existiert eine
Strecke, deren Längenmaßzahl λ ist.
Definition 1. l heißt Längenfunktional :⇐⇒
(0) l : S −→ R+ ,
(1) AB ∼
(Bewegungsinvarianz),
= CD =⇒ l(AB) = l(CD)
(2) zw(ABC) =⇒ l(AC) = l(AB) +l(BC)
(Additivität),
(3) ∃CD ∈ S C 6= D ∧ l(CD) = 1
(Normiertheit).
Satz 1. Zu jeder Eichstrecke CD existiert genau ein Längenfunktional.
Bemerkungen:
1. Länge einer Strecke |AB| = l(AB) · |CD| (Maßzahl × Maßeinheit).
2. Urmeter, heutige Meterdefinition ( 1m := Weglänge des Lichtes im
Vakuum in 1/299892458 Sekunde).
3. Winkelmessung.
2.3.5
Parallelenaxiom und nichteuklidische Geometrie
(P) ∀g ∈ G ∀ P ∈ P ∃! h ∈ G P ∈ h ∧ hkg .
Durch jeden Punkt geht höchstens eine Gerade, die zu einer vorgegebenen
Geraden parallel ist.
Das Parallelenproblem und seine Lösung durch Gauß,14 Lobatschewski15
und Bólyai.16
Definition 1. a) Unter absoluter Geometrie versteht man die Gesamtheit
der Aussagen, die sich aus den Axiomen der Inzidenz, Anordnung, Kongruenz und Stetigkeit (ohne Parallelenaxiom (P)) ableiten lassen.
b) Euklidische Geometrie (des Raumes) ist die Gesamtheit der Aussagen, die
sich aus allen Hilbertschen Axiomen ableiten lassen.
c) Hyperbolische (nichteuklidische) Geometrie ist die Gesamtheit der Aussagen, die sich aus den Axiomen der Inzidenz, Anordnung, Kongruenz, Stetigkeit und dem hyperbolischen Parallelenaxiom (¬P ) ableiten lassen.
14
Carl Friedrich Gauß, 1777 - 1855
Nikolai Iwanowitsch Lobatschewski, 1792 - 1856
16
János (Johann) Bólyai, 1802 - 1860
15
2.4 Andere Aufbauarten der Geometrie
23
Lemma 1. (Legendresche Sätze)17
a) In jedem Dreieck der absoluten Geometrie gilt für die Innenwinkelgrößen
α, β, γ die Ungleichung α + β + γ ≤ π.
b) Ist in einem Dreieck der absoluten Geometrie die Innenwinkelsumme
gleich π, so ist sie es in jedem Dreieck.
Satz 1. a) Die Innenwinkelsumme in jedem euklidischen Dreieck ist π.
b) Die Innenwinkelsumme in jedem hyperbolischen Dreieck ist stets kleiner
als π.
Bemerkungen:
1. Satz 1 a) ist äquivalent zum Parallelenaxiom (P); weitere zu (P) äquivalente Aussagen.
2. Modelle der hyperbolischen Ebene.
3. Elliptische Geometrie, Modelle, sphärische Geometrie.
2.4
Andere Aufbauarten der Geometrie
a) Ersetzen der Kongruenzaxiome durch Bewegungsaxiome.
b) Analytische Geometrie: P := R3 , Geraden, Ebenen, (Widerspruchsfreiheit der euklidischen Geometrie).
c) Aus der projektiven Geometrie (z. B. Ebene) durch Auszeichnung eines Kegelschnitts.
d) Aus der Differentialgeometrie (Riemannscher Raum, quadratische Differentialform).
e) Rein gruppentheoretischer Aufbau (Gruppe mit invariantem involutorischem Erzeugendensystem).
17
Adrien Marie Legendre, 1752 - 1833
24
3 TRANSFORMATIONEN
3
Transformationen
3.1
Bewegungen in der Ebene
Definition 1. a) So := P×P bezeichne die Menge aller gerichteten Strecken
der euklidischen Ebene.
b) Zwei gerichtete Strecken (A, B) und (C, D) heißen parallelgleich
A=B
für C = D
A 6= B ∧ ∃P, Q ∈
/ g(AB) ∪ g(CD)
(A, B) =
k (C, D) :⇔
g(AB) k g(P Q) k g(CD) ∧
g(AP ) k g(BQ) ∧ g(CP ) k g(DQ)
für C 6= D.
c) Zwei Fahnen fi := Ai Bi+ Ci+ (i = 1, 2) heißen gleichorientiert
f1 go f2
:⇐⇒
(1) ∃B0 , C0 (A1 , B1 ) =
k (A2 , B0 ) ∧ (A1 , C1 ) =
k (A2 , C0 ) und
(2) A2 B0+ C0+ = A2 B2− C2−
∃g = g(A2 C) B0 ∈
A2 CB2+
∨
∧ A2 B0+ C0+ ∩ f2 ∩ g = A2 C + .
Lemma 1. (Kleiner Satz von Desargues) Sind g1 , g2 , g3 paarweise verschiedene parallele Geraden und Ai , A0i ∈ gi (i = 1, 2, 3), so gilt
g(A1 A2 )kg(A01 A02 ) ∧ g(A1 A3 )kg(A01 A03 ) =⇒ g(A2 A3 )kg(A02 A03 ).
Hilfssatz 1. a) =
k ist eine Äquivalenzrelation auf der Menge So aller
gerichteten Strecken.
b) go ist eine Äquivalenzrelation auf der Menge F aller Fahnen.
Folgerungen: a) Die Menge So aller gerichteten Strecken zerfällt vermöge der Relation =
k in Äquivalenzklassen
−
−
→
AB := {(X, Y ) ∈ So : (X, Y ) =
k (A, B)} ∈ V := So / =
k,
die Vektoren heißen.
b) Die Menge F aller Fahnen zerfällt vermöge der Relation go in genau zwei
Orientierungsklassen AB + C + und AB + C − . Die Ebene ε heißt orientiert,
wenn eine dieser beiden Klassen ausgezeichnet ist: (ε, AB + C + ).
Satz 1. Mit der Addition
−
−
→ −−→ −−→
−−→
AB + CD = AD0 :⇐⇒ (B, D0 ) ∈ CD
und der Vervielfachung mit reellen Zahlen λ
(
C ∈ AB + ∧ l(AC) = λ · l(AB) für λ ≥ 0
−
−→ −→
λAB = AC :⇔
C ∈ AB − ∧ l(AC) = |λ|l(AB) für λ ≤ 0
3.1 Bewegungen in der Ebene
25
wird (V, +, R) zu einem zweidimensionalen reellen Vektorraum.
Definition 2. (Qualitative Definition der eigentlichen Bewegungen)
ϕ heißt eigentliche Bewegung (direkte Kongruenztransformation) der euklidischen Ebene
ϕ ∈ B+
:⇐⇒ (0) ϕ : P −→ P,
2
(1) ∀A, B ∈ P AB ∼
= ϕ(A)ϕ(B) ,
(2) ∀f ∈ F f = AB + C + =⇒ f go ϕ(A)ϕ(B)+ ϕ(C)+ .
Hilfssatz 2. Jede eigentliche Bewegung ϕ ist eine Bijektion von P auf
P, und ϕ ist zwischenrelationstreu, geradentreu, winkeltreu, halbebenentreu,
fahnentreu und orientierungstreu.
Definition 2’. (Konstruktive Definition der eigentlichen Bewegungen)
−−
→
a) τ heißt Translation (Verschiebung) mit dem Translationsvektor AB
−
−→
τ ∈ T2 :⇐⇒ τ : P −→ P ∧ ∀ X ∈ P X, τ (X) ∈ AB .
b) δ heißt Drehung mit dem Zentrum Z ∈ P und dem (orientierten) Elementarwinkel (Drehwinkel) der Größe α :⇐⇒
(
X 0 = Z für X = Z,
0
δ : P −→ P ∧ δ(X) = X mit
ZX ∼
= ZX 0 ∧ w+ (^[X 0 ZX]) = α für X 6= Z.
c) Eine eigentliche Bewegung ist die Hintereinanderausführung von endlich
vielen Translationen und Drehungen.
Lemma 2. Die Definitionen 2 und 2’ c) sind äquivalent.
Korollar. Jede eigentliche Bewegung ϕ ∈ B+
2 \ {idP } ist entweder eine
Drehung oder eine Translation.
Definition 3. (Qualitative Definition der uneigentlichen Bewegungen)
ϕ heißt uneigentliche Bewegung (indirekte Kongruenztransformation) der euklidischen Ebene
ϕ ∈ B−
:⇐⇒ (0) ϕ : P −→ P,
2
(1) ∀A, B ∈ P AB ∼
= ϕ(A)ϕ(B) ,
(2) ∀f ∈ F f = AB + C + =⇒ f go ϕ(A)ϕ(B)+ ϕ(C)− .
Hilfssatz 3. Jede uneigentliche Bewegung ϕ ist eine Bijektion von P auf
P, und ϕ ist zwischenrelationstreu, geradentreu, winkeltreu, halbebenentreu
und fahnentreu, aber ϕ ändert die Orientierung.
26
3 TRANSFORMATIONEN
Definition 3’. (Konstruktive Definition der uneigentlichen Bewegungen)
a) σg heißt Spiegelung an der Geraden g (Geradenspiegelung)
:⇐⇒ σg : P −→ P ∧
0
fürX ∈ g
X = X
0
0
0
∼
σg (X) = X mit X F = XF ∧ zw(XF X ) für X 6∈ g
∧ g(XF ) ⊥ g ∧ F ∈ g.
b) Eine uneigentliche Bewegung ist die Hintereinanderausführung einer ungeraden Anzahl von Spiegelungen und endlich vieler Translationen und Drehungen.
Lemma 3. Die Definitionen 3 und 3’ b) sind äquivalent.
Korollar. Jede uneigentliche Bewegung ϕ ∈ B−
2 ist eine Gleitspiegelung
mit eventuell verschwindendem Translationsanteil.
Definition 4. (Qualitative Definition der Bewegungen)
ϕ heißt Bewegung (Kongruenztransformation) der euklidischen Ebene
ϕ ∈ B2 :⇐⇒ (0) ϕ : P −→ P,
∼
(1) ∀A, B ∈ P AB = ϕ(A)ϕ(B) ,
Hilfssatz 4. Jede Bewegung ϕ ∈ B2 ist eine Bijektion von P auf P,
und ϕ ist zwischenrelationstreu, geradentreu, winkeltreu, halbebenentreu
und fahnentreu (aber nicht notwendig orientierungstreu).
Definition 4’. (Konstruktive Definition der Bewegungen) Eine Bewegung ist die Hintereinanderausführung endlich vieler Translationen, Drehungen und Spiegelungen.
Lemma 4. Die Definitionen 4 und 4’ sind äquivalent.
Folgerungen: 1. Jede Bewegung ϕ ∈ B2 ist eindeutig bestimmt durch
Vorgabe einer Fahne AB + C + und der (Bild-) Fahne ϕ(A)ϕ(B)+ ϕ(C)+ .
2. Jede von der Identität verschiedene Bewegung ist entweder eine Translation, Drehung, Spiegelung oder Gleitspiegelung.
3. Jede Bewegung ist das Produkt von höchstens 3 Geradenspiegelungen.
Satz 2. Die Bewegungen bilden eine Untergruppe der vollen Transformationsgruppe SP der euklidischen Ebene mit den eigentlichen Bewegungen
als Untergruppe und den Translationen als Normalteiler:
18
T2 C B+
2 C B2 < SP ∧ T2 C B2 .
18
N C G bedeute: N ist Normalteiler der Gruppe G.
3.2 Bewegungen im Raum (Skizze)
27
Satz 3. (Satz von den 3 Spiegelungen) Liegen drei paarweise verschiedene
Geraden g, h, k in einem Büschel (g ∩ h ∩ k = {S} ∨ g k h k k), so existiert
eine diesem Büschel angehörende Gerade f mit
σg σh σk = σf .
Bemerkung: Einführung kartesischer Koordinaten in der euklidischen Ebe−−→
ne; Punkte X mit Ortsvektor x = OX.
Satz 4. (Analytische Beschreibung von ebenen Bewegungen) Zu jeder
Bewegung ϕ ∈ B2 existiert eine reelle Zahl α (−π ≤ α ≤ π) und ein Vektor
t, so daß für alle Punkte X mit Ortsvektoren x gilt
ϕ(x) =
cos α −ε sin α
x+t
sin α ε cos α
−
mit ε = +1 für ϕ ∈ B+
2 und ε = −1 für ϕ ∈ B2 .
3.2
Bewegungen im Raum (Skizze)
Sei jetzt (P, G, E) der (dreidimensionale) euklidische Raum.
Definition 1. (Qualitative Definition der Bewegungen)
ϕ heißt Bewegung (Kongruenztransformation) des euklidischen Raumes
ϕ ∈ B3 :⇐⇒ (0) ϕ : P −→ P,
(1) ∀A, B ∈ P AB ∼
ϕ(A)ϕ(B)
,
=
Hilfssatz 1. Jede Bewegung ϕ ∈ B3 ist eine Bijektion von P auf P,
und ϕ ist zwischenrelationstreu, geradentreu, ebenentreu, halbraumtreu und
winkeltreu (Elementarwinkel und Winkel zwischen Ebenen).19
Definition 1’. (Konstruktive Definition der Bewegungen)
−−
→
a) τ heißt Translation (Verschiebung) mit dem Translationsvektor AB
τ ∈ T3
19
−
−→
:⇐⇒ τ : P −→ P ∧ ∀ X ∈ P X, τ (X) ∈ AB .
Aber ϕ ist nicht notwendig orientierungstreu
28
3 TRANSFORMATIONEN
b) δ heißt Drehung mit der Achse a ∈ G und dem (orientierten) Winkel der
Größe α
0
X = X für X ∈ a,
0
δ : P −→ P ∧ δ(X) = X mit ZX ∼
/ a,
= ZX 0 ∧ w+ (^[X 0 ZX]) = α für X ∈
0
a ⊥ ε = ε(XX Z), a ∩ ε = Z.
c) σε heißt Spiegelung an der Ebene ε (Ebenenspiegelung)
:⇐⇒ σε : P −→ P ∧
0
für X ∈ ε
X = X
0
0
0
∼
σε (X) = X mit X F = XF ∧ zw(XF X )
für X 6∈ ε ∧
∧ g(XF ) ⊥ ε ∧ F ∈ ε.
d) Eine Bewegung ist die Hintereinanderausführung von endlich vielen Translationen, Drehungen und Ebenenspiegelungen.
Lemma 1. Die Definitionen 1 und 1’ sind äquivalent.
Bemerkungen:
1. Eigentliche Bewegungen (direkte Kongruenztransformationen) ϕ im Raum
(ϕ ∈ B+
3 ) sind Schraubungen (vertauschbares (!) Produkt δ · τ = τ · δ einer
Drehung und einer Translation mit Drehachse in Translationsrichtung) mit
eventuell verschwindendem Dreh- oder Translationsanteil.
2. Uneigentliche Bewegungen (indirekte Kongruenztransformationen) ϕ im
Raum (ϕ ∈ B−
3 ) sind Gleitspiegelungen (vertauschbares (!) Produkt σ · τ =
τ ·σ einer Spiegelung und einer Translation, deren Richtung parallel zur Spiegelebene ist) oder Drehspiegelungen (vertauschbares (!) Produkt δ · σ = σ · δ
einer Spiegelung und einer Drehung, deren Achse senkrecht zur Spiegelebene
ist) mit eventuell verschwindendem Translations- bzw. Drehanteil.
Satz 1. Die Bewegungen bilden eine Untergruppe der vollen Transformationsgruppe SP des euklidischen Raumes mit den eigentlichen Bewegungen
als Untergruppe und den Translationen als Normalteiler:
T3 C B+
3 C B3 < SP
∧ T3 C B3 .
Bemerkungen:
Analytische Beschreibung der Bewegungen im Raum; Bewegungen auf der
Sphäre.
3.3 Ähnlichkeitsabbildungen
3.3
29
Ähnlichkeitsabbildungen
Idee: Allgemeinere Abbildungen durch Abschwächung der Invarianzforderungen charakteristische Invariante der Bewegungen war Streckenlänge, jetzt nur noch Längenverhältnis von Strecken. P bezeichnet in diesem Kapitel die Menge der Punkte
der Ebene oder des Raumes.
Definition 1. (Qualitative Definition der Ähnlichkeitsabbildungen)20
a) Eine Bijektion ϕ von P auf P heißt Ähnlichkeitsabbildung
l ϕ(A)ϕ(B) l(AB)
.
=
ϕ ∈ H :⇐⇒ ∀A, B, C, D ∈ P C 6= D ⇒
l(CD)
l ϕ(C)ϕ(D)
b) ϕ heißt direkt (indirekt), falls ϕ orientierungserhaltend (orientierungsändernd) ist.
Hilfssatz 1. Jede Ähnlichkeitsabbildung ist zwischenrelationstreu, geradentreu, ebenen- und winkeltreu.21
Definition 1’. (Konstruktive Definition der Ähnlichkeitsabbildungen)
a) Eine Radialstreckung (zentrische Streckung) mit dem Zentrum Z ∈ P und
dem Streckungsfaktor λ ∈ R∗+ ist eine Abbildung ρ von P in P mit folgendem
Mechanismus:
(
X0 = X
für X = Z
ρ(X) = X 0 mit
0
+
0
X ∈ ZX ∧ l(X Z) = λl(XZ) für X 6= Z.
b) Eine Ähnlichkeitsabbildung ist die Hintereinanderausführung von endlich
vielen Radialstreckungen und Bewegungen.
Lemma 1. Die Definitionen 1 und 1’ sind äquivalent.
Satz 1. Die Ähnlichkeitsabbildungen bilden eine Untergruppe der vollen
Transformationsgruppe von P, die sogenannte Hauptgruppe, mit den direkten Ähnlichkeitsabbildungen und den Bewegungen als Untergruppen:
H+ C H < SP
∧ B < H.
Bemerkungen:
1. Jede Ähnlichkeitsabbildung, die keine Kongruenztransformation ist, besitzt wenigstens einen Fixpunkt (Drehstreckungen und Spiegelstreckungen).
2. Für Transformationen ϕ ∈ SP gilt: ϕ ∈ H ⇔ ϕ ist sphärentreu ⇔ ϕ bildet orthogonale Geraden auf orthogonale Geraden ab.
20
21
Definitionen und Aussagen in diesem Kapitel gelten für die Ebene und den Raum!
Genauer: Winkel werden auf kongruente Winkel abgebildet!
30
3 TRANSFORMATIONEN
3. Analytische Beschreibung von Ähnlichkeitsabbildungen.
4. Ähnlichkeitslehre = äquiforme Geometrie = Theorie der Invarianten der
Gruppe H.
3.4
Affine Abbildungen der Ebene
Weitere Abschwächung der Invarianzforderungen (Streckenverhältnis- zu Teilverhältnisinvarianz) liefert neue (größere) Klasse von Transformationen.
Definition 1. (Qualitative Definition der affinen Abbildungen)
a) Für kollineare Punkte A, B, C mit B 6= C ist das Teilverhältnis
T V (A, B, C) = (A, B; C) :=
( l(AC)
l(CB)
l(AC)
− l(CB)
für zw(ACB)
sonst.
Im ersten Fall teilt C die Strecke AB von innen, im zweiten von außen.
b) Eine Bijektion α von P auf P heißt Affinität (affine Abbildung der euklidischen Ebene)
α ∈ A2 :⇐⇒ α ist geradentreu und teilverhältnisinvariant.
Hilfssatz 1. Affinitäten bilden parallele Geraden wieder auf parallele
Geraden ab und sind eindeutig bestimmt durch die Vorgabe von drei nichtkollinearen Punkten und deren (nichtkollinearen) Bildern.
Definition 1’. (Konstruktive Definition der affinen Abbildungen)
a) ω heißt Orthogonalstreckung an der Achse a ∈ G mit dem Streckungsfaktor
λ ∈ R∗+ , wenn ω eine Abbildung von P in P ist mit folgendem Mechanismus:
0
für X ∈ a
X = X
0
0
+
0
ω(X) = X mit X ∈ g(XF ) ∩ aX ∧ l(X F ) = λl(XF ) für X 6∈ a ∧
∧ g(XF ) ⊥ a ∧ F ∈ a.
b) Eine Affinität ist die Hintereinanderausführung von endlich vielen Orthogonalstreckungen und Ähnlichkeitsabbildungen.
Lemma 1. Die Definitionen 1 b) und 1’ b) sind äquivalent.
Bemerkungen:
1. Jede Affinität läßt sich als Produkt einer Ähnlichkeitsabbildung und einer
Orthogonalstreckung darstellen.
2. Die Affinitäten bilden eine Gruppe, mit den orientierungserhaltenden Affinitäten und den Ähnlichkeitsabbildungen als Untergruppen:
H+ < A+ < A ∧ H < A.
3.5 Erlanger Programm
31
3. Affine Geometrie ist die Invariantentheorie der Gruppe A.
Satz 1. (Satz vom Rechtwinkelpaar
einer ebenen Affinität)
∀α ∈ A2 \ H2 ∀S ∈ P ∃!! {g, h} ⊆ G g ∩ h = S ∧ g ⊥ h ∧ α(g) ⊥ α(h) .
22
Definition 2. Eine Affinität mit einer Fixpunktgeraden a heißt axiale
Affinität mit der Achse a.
Bemerkungen:
1. Orthogonalstreckungen und Geradenspiegelungen sind axiale Affinitäten.
2. Eine axiale Affinität α ist eindeutig bestimmt durch Vorgabe der Achse a
und eines Original - Bildpunktpaares P, α(P ) ∈
/a.
3. Inhaltsverhältnisse sind affininvariant.
4. Inhaltstreue Affinitäten heißen äquiaffine Abbildungen, sie bilden eine Untergruppe von A und werden von den Affinspiegelungen erzeugt.
Lemma 2.Eine Affinität α ist genau dann eine axiale Affinität (mit der
Achse a), wenn gilt:
(1) Einander entsprechende Punkte P, α(P ) liegen auf Geraden einer festen
Richtung, der Affinitätsrichtung.
(2) Einander entsprechende Geraden g, α(g) schneiden sich auf einer festen
Geraden a.
Bemerkungen:
1. Räumliche Affinitäten (analog).
2. Analytische Beschreibung von Affinitäten.
Hilfssatz 2. Jede lineare Transformation ist teilverhältnisinvariant.
Satz 2. Jede Affinität ist das Produkt einer linearen Transformation (mit
von 0 verschiedener Determinante) und einer Translation (und umgekehrt).
3.5
Erlanger Programm
Weitere sinnvolle Abschwächung der Invarianzforderungen (allgemeinere geradentreue Abbildungen) sind nicht möglich: Jede geradentreue Transformation der (reellen) euklidischen Ebene ist eine Affinität. Für weitere Abschwächung muß zur
projektiven Ebene (P̂, Ĝ) übergegangen werden, vgl. Lemma 2.2.4.1., mit Fortsetzung der affinen Transformationen auf die projektive Ebene:
22
Für G ∈ g \ {S} und H ∈ h \ {S} heißt dann ^(GSH), ^(α(G)α(S)α(H) Rechtwinkelpaar von α
32
3 TRANSFORMATIONEN
α ∈ A2 −→ α̂ ∈ Aˆ2 mit α̂(X) :=
(
α(X) für X ∈ P
g0
für g ∈ X ∈ u ∧ α(g) = g 0 .
Definition 1. (Qualitative Definition der projektiven Transformationen)
a) Für kollineare Punkte A, B, C, D ist das Doppelverhältnis
DV (A, B, C, D) = (A, B; C, D) :=
T V (A, B; C))
∈ R ∪ {∞}.
T V (A, B; D)
b) Eine doppelverhältnisinvariante Bijektion der projektiven Ebene auf sich
heißt projektive Transformation.
Definition 1’. (Konstruktive Definition der projektiven Transformationen)
a) Eine Zentralkollineation (allgemeine Homologie, Perspektivität) mit dem
Zentrum Z, der Achse a (Z ∈
/ a) und dem Faktor λ ist eine Transformation
η der projektiven Ebene mit folgendem Mechanismus
(
X0 = X
für X ∈ a ∪ {Z}
η(X) = X 0 mit
0
X ∈ g(ZX) ∧ g(ZX) ∩ a = F ∧ (Z, F ; X 0 , X) = λ sonst.
b) Eine projektive Transformation ist die Hintereinanderausführung von
endlich vielen Zentralkollineationen und (erweiterten) Affinitäten.
Lemma 1. Die Definitionen 1 b) und 1’ b) sind äquivalent.
Hilfssatz 1. Eine geradentreue Transformation von P̂ ist genau dann
eine Zentralkollineation, wenn gilt
(1) Original- und Bildgeraden schneiden sich auf einer festen Geraden a (Achse).
(2) Original- und Bildpunkte liegen auf Geraden durch einen festen Punkt
Z (Zentrum).
Satz 1. Die Menge Π aller projektiven Transformationen bildet eine
Gruppe mit den erweiterten Affinitäten als Untergruppe:
 < Π < SP̂ .
F. Klein (Erlanger Programm 1872, vgl. 1.1): Geometrie ist die Invariantentheorie einer Transformationsgruppe über einer Mannigfaltigkeit.
33
Geometrie
Translationsgeometrie
Euklidische
Geometrie
Äquiforme
Geometrie
Affine
Geometrie
Projektive
Geometrie
4
Transf.Gruppe
T
(zusätzl.)
Erzeugende
Translationen
charakterist.
Invariante
Länge,
Richtung
weitere
Invarianten
alle Bez.
zw. Punkten
und Geraden
B
Spiegelungen
Länge
Inhalt
H
zentrische
Streckungen
(bel.)
Streckenverhältnis
Teilverhältnis
Doppelverhältnis
A
Π
Orthogonalstreckungen
Zentralkollineationen
Winkelgröße
Parallelität
Geradentreue
Darstellende Geometrie
Grundaufgabe der Darstellenden Geometrie in der Schule ist die Abbildung
des dreidimensionalen euklidischen Raumes (Anschauungsraum) R3 auf eine
zweidimensionale Bildebene π mittels Projektion α nach folgendem Verfahren:
Gegeben ist ein Punkt O, das Projektionszentrum mit O 6∈ π. Jeder Punkt
P ∈ R3 \ {O} wird mit O verbunden zu einer Projektionsgeraden g =
g(OP ).23 Der Schnittpunkt P 0 := g ∩ π dieser Projektionsgeraden mit der
Bildebene liefert den Bildpunkt P 0 = α(P ). Ist O ein eigentlicher Punkt des
Raumes, so heißt α Zentralprojektion und P 0 Zentralbild (Zentralprojektion,
Zentralriß) von P . Ist O ein Fernpunkt, so heißt α Parallelprojektion und P 0
Fernbild (Parallelprojektion, Parallelriß) von P . In diesem Fall repräsentiert
O eine Richtung, d. h. eine Klasse zu einer gegebenen Geraden l 6k π paralleler
Geraden. Diese Parallelklasse bzw. l heißt dann auch Projektionsrichtung.
23
auch Projektionsstrahl OP +
34
4 DARSTELLENDE GEOMETRIE
4.1
Parallelprojektion
Definition 1. Für die Parallelprojektion in Richtung l auf die Bildebene π
heißt
- jede Gerade g k l Projektionsgerade,
- jede Ebene ε mit l ⊆ ε projizierende Ebene,
- G := g ∩ π Spurpunkt der Geraden g,
- e := ε ∩ π Spurgerade (Spur) der Ebene ε und
- h Hauptlinie der Ebene ε für h ⊆ ε ∧ h k π.
Satz 1. (Hauptsatz der Parallelprojektion) Die Fernbilder paralleler Strekken, die nicht parallel zur Projektionsrichtung sind, sind parallel und im
Längenverhältnis der Originale.
Definition 2. Der für jede Gerade g bei Parallelprojektion nach Satz 1
eindeutig bestimmte Faktor eg mit
∀A, B ∈ P3 g(AB) k g
=⇒
heißt Bildfaktor von g.
l(A0 B 0 )
= eg
l(AB)
Eigenschaften des Bildfaktors eg einer Geraden g:
(1) eg = eg (g, l) ist Funktion von g und der Projektionsrichtung l mit
0 ≤ eg < ∞.
(2) Für Projektionsgeraden g k l gilt eg = 0.
(3) Für Hauptlinien h k π gilt eh = 1.
(4) Für Normalprojektion (l ⊥ π) gilt ∀g(eg ≤ 1).
Satz 2. Ist h0 Parallelprojektion der Hauptlinie h ⊆ ε einer Ebene ε mit
der Spur e, so gilt h0 k h k e.
Satz 3. Zwei verschiedene Parallelprojektionen ε0 , ε00 ⊆ π einer Ebene ε
in dieselbe Bildebene π sind zueinander axial affin mit der Achse e = ε ∩ π
(Spur von ε) und der Affinitätsrichtung g(P 0 P 00 ) für P ∈ ε \ e.
Definition 3. Das Bild P ∗ = P0 = (P ) ∈ π eines Punktes P ∈ ε einer
Ebene ε bei Drehung von ε um die Spurgerade e = ε ∩ π um den Winkel
^(ε, π) heißt Umklappung von P in π.
4.2 Normalprojektion (Eintafelprojektion)
35
Folgerung aus Satz 3: Umklappung F∗ und Fernbild F0 einer ebenen
Figur F sind axial affin.
Bemerkung: Bedeutung dieser Folgerung: Die Umklappung F∗ einer ebenen Figur F ist kongruent zum Original F - ist von der Umklappung F∗ ein
Punkt P ∗ und das Fernbild P 0 bekannt, so kann das Original F bzw. F∗ aus
F0 rekonstruiert werden.
4.2
Normalprojektion (Eintafelprojektion)
Definition 1. Im Fall der Normalprojektion bzw. senkrechten Eintafelprojektion ist die Projektionsrichtung l orthogonal zur Bildebene π. Dann heißen
die Hauptlinien h ⊆ ε auch Höhenlinien, die Geraden n ⊆ ε mit n ⊥ h
Neigungs- oder Fallinien, der Winkel zwischen einer Neigungslinie und ihrer
Normalprojektion Neigungswinkel der Ebene ε, eine Ebene β mit β ⊥ π und
β ⊥ ε Profilebene zu ε, jedes rechtwinklige Dreieck 4P P 0 F mit P ∈ n ⊆ ε
und F := n ∩ π = n ∩ e Stützdreieck und der Bildfaktor der Neigungslinien
von ε auch Stauchungsfaktor von ε.
Folgerungen:
1. Das Bild einer Ebene ist z. B. eindeutig bestimmt durch Spur, Neigungswinkelgröße und Fallrichtung oder durch das Bild einer Neigungslinie und der
Neigungswinkelgröße oder durch das Bild h0 einer Höhenlinie h, der (wahren)
Höhe von h und der Spur e.
2. Die Rekonstruktion einer endlichen Punktmenge aus ihrer Normalprojektion ist möglich, wenn zusätzlich die (wahren) Höhen der einzelnen Punkte
gegeben sind (kotierte Projektion).
Satz 1. (Hauptsatz der Normalprojektion) Für die Normalprojektion α0
eines Winkels α, der in einer Ebene ε liegt mit ε 6⊥ π und ε 6k π, gilt:
(1) α rechter Winkel ∧ ein Schenkel auf Höhenlinie ⇔ |α| = |α0 | ∧ |α0 | = π2 ,
(2) α spitzer Winkel ∧ ein Schenkel auf Höhenlinie =⇒ |α| > |α0 |,
(3) α spitzer Winkel ∧ ein Schenkel auf Neigungslinie ⇒ |α| < |α0 |.
Grundaufgaben:
(a) Neigungswinkel einer Geraden und wahre Länge einer Strecke:
Gegeben: Normalriß g0 einer Geraden g durch zwei Punkte (P 0 , Q0 ), wahre
Höhen hP , hQ der Punkte P, Q ∈ g.
Gesucht: Neigungswinkelgröße α = |^(π, g)| von g und wahre Länge |P Q|
der Strecke P Q ⊆ g.
Lösung: - Senkrechte s zu g0 in Q0 , Senkrechte t zu g0 in P 0 .
- Auf s Strecke Q0 Q0 mit |Q0 Q0 | = hQ abtragen, auf t Strecke P 0 P0
36
4 DARSTELLENDE GEOMETRIE
mit |P 0 P0 | = hP abtragen.
⇒ g0 := g(P0 Q0 ) ist Umklappung von g in π und G := g0 ∩ g0
ist Spurpunkt von g.
Ergebnis: α = |^(P 0 GP0 )| und |P Q| = |P0 Q0 |.
g0
Q0b
Q
P
π
g0
P0b
b
Q0
b
α
P0
b
G
Abbildung 8: Grundaufgabe (a)
(b) Gegenseitige Lage zweier Geraden.
(c) Neigungswinkel einer Ebene.
(d) Wahre Größe und Gestalt einer ebenen Figur.
(e) Senkrechte auf einer Ebene errichten.
(f) Lot auf eine Ebene fällen.
(g) Schnittpunkt von Gerade und Ebene.
(h) Schnittgerade zweier Ebenen.
4.3
Zweitafelprojektion
Standpunkt: Zur „horizontalen“ Bildebene π1 , der Grundrißebene, wird eine
zweite dazu senkrechte Bildebene π2 hinzugenommen, die Aufrißebene. Für
Lageangaben in Koordinaten wird π1 als x − y-Ebene interpretiert, in welche die Aufrißebene π2 (als y − z-Ebene interpretiert) in die (gemeinsame)
Zeichenebene π1 um die y-Achse umgeklappt wird.
4.3 Zweitafelprojektion
37
Definition 1. Die Normalprojektion P 0 eines Punktes P auf π1 heißt
Grundriß, die Normalprojektion P 00 von P auf π2 Aufriß von P .
π1 ∩ π2 = y heißt Rißachse.
Die Geraden g(P 0 P 00 ) heißen Ordnungslinien (Ordner).
Die Geraden f k π2 heißen Frontlinien.
Folgerungen:
(1) Geraden g haben im allgemeinen zwei Spurpunkte G1 := g ∩ π1 und
G2 := g ∩ π2 .
(2) Ebenen ε haben im allgemeinen zwei Spurgeraden, die Grundrißspur
e1 := ε ∩ π1 und die Aufrißspur e2 := ε ∩ π2 .
(3) Geraden und Ebenen haben entsprechend jeweils zwei Neigungswinkel.
(4) Ist f eine Frontlinie, so gilt f 0 k f k e2 (vgl. Satz 4.1.2).
Satz 1. (Hauptsatz der Zweitafelprojektion) a) Ordnungslinien stehen
senkrecht auf der Rißachse.
b) Die beiden Spurgeraden einer Ebene schneiden sich auf der Rißachse.
c) Die Spurpunkte von Geraden in einer Ebene ε liegen auf den Spurgeraden
von ε.
Grundaufgaben:
(a) Neigungswinkel einer Geraden und wahre Länge einer Strecke.
Gegeben: Gerade g durch den Spurpunkt G1 und den Grundriß P 0 und Aufriß P 00 eines Punktes P ∈ g.
Gesucht: Neigungswinkel von g gegen die Grundrißebene π1 (für Aufrißebene
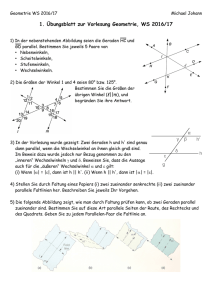
analog!) und wahre Länge der Strecke G1 P .
Lösung: 1. Methode: Umklappung der projizierenden Ebene durch g zu π1
(bzw. π2 ) in die Bildebene π1 (bzw. π2 ) wie bei der Normalprojektion.
2. Methode: Drehung δ der projizierenden Ebene β um die Achse durch G1
senkrecht zur Grundrißebene in Frontlage: Parallele durch G1 zur Rißachse,
Abtragen von |G1 P 0 | liefert den Grundriß Pδ0 des gedrehten Punktes Pδ ; die
Parallele durch P 00 zur Rißachse schneidet den Ordner durch Pδ0 in Pδ00 . Die
Gerade durch G001 und Pδ00 ist der Aufriß gδ00 der in Frontlage gedrehten Geraden g, so daß der gesuchte Neigungswinkel der Winkel zwischen gδ00 und
der Rißachse ist und die wahre Länge der Strecke G1 P als G001 Pδ00 abgelesen
werden kann (vgl. Abb. 9).
(b) Gegenseitige Lage zweier Geraden.
(c) Neigungswinkel einer Ebene.
(d) Wahre Größe und Gestalt einer ebenen Figur.
38
4 DARSTELLENDE GEOMETRIE
π2
G2
G2
P
P
00
00
Pδ00
g 00
P
Pδ
G02
G01
G001
P0
g0
Pδ0
Pδ0
G1
π1
gδ0
Abbildung 9: Drehung in Frontlage
(e) Senkrechte auf einer Ebene errichten.
(f) Lot auf eine Ebene fällen.
(h) Schnittgerade zweier Ebenen.
(g) Schnittpunkt von Gerade und Ebene.
C
00
P c
h00
D00ac
A
g 00
g 00
00
d00
D00 b
B 00
h0
00
A
e1
0
cD
0
B0
c
D0
0
d =g
C
0
cP 0
h000
000
d
D
000
d
g0
0
P 000 c
a) Deckgerade
β0
b) Seitenriß
Abbildung 10: Schnitt von Gerade und Ebene
1. Methode: Deckgerade (wie in Eintafelprojektion).
Gegeben: Ebene ε durch die Risse (A0 , B 0 , C 0 , A00 , B 00 , C 00 ) dreier nichtkollinearer Punkte A, B, C und eine Gerade g in Grund- und Aufriß.
Gesucht: Durchstoßpunkt D := g ∩ ε in Grund- und Aufriß.
4.4 Durchdringungen
39
Lösung: Deckgerade d ⊆ ε mit d0 = g0 Grundrisse der Schnittpunkte von d
mit den Dreieckseiten können auf Ordnern in den Aufriß übertragen werden,
woraus sich d00 ergibt. Dann folgt D 00 := d00 ∩ g00 .
2. Methode: Seitenriß.
Gegeben: Ebene ε durch Grundrißspur e1 und Risse h0 , h00 einer Höhenlinie
h und eine Gerade g durch g0 , g00 .
Gesucht: Durchstoßpunkt D := g ∩ ε in Grund- und Aufriß.
Lösung: Seitenriß auf eine Profilebene β zu ε, die um ihre Grundrißspur β 0
in π1 umgeklappt ist. Dann ergibt sich der Seitenriß ε000 von ε als Verbindungsgerade des Seitenrisses von e1 und h und der Seitenriß g000 als Verbindungsgerade des Seitenrisses vom Spurpunkt G1 und des Seitenrisses P 000
eines beliebig wählbaren Punktes P ∈ g. Die Geraden g000 und ε000 schneiden
sich im Seitenriß D 000 des gesuchten Punktes (vgl. Abb. 10).
4.4
Durchdringungen
Problemstellung: Gegeben sind zwei Körper K1 und K2 (z. B. durch Grundund Aufriß), gesucht ist der Stoßkörper (Durchschnitt) D := K1 ∩ K2 (z. B.
in Grund- und Aufriß).
Hier werden nur elementare Körper (Polyeder) betrachtet, so daß die Lösung auf die Bestimmung der Schnittgeraden von zwei Ebenen zurückführbar
ist bzw. auf die Bestimmung der Schnittfigur eines Körpers und einer Ebene.
Eine Standardaufgabe dieses Typs ist folgende
Pyramidenschnittaufgabe.
Gegeben: Dreiseitige Pyramide P mit Grundflächendreieck ABC und Spitze
S in Grund- und Aufriß sowie eine Ebene ε durch die Grundrißspur e1 und
Grundriß h0 und Aufriß h00 einer Höhenlinie h von ε.
Gesucht: Schnittfigur P ∩ ε in Grund- und Aufriß.
Lösung: 1. Methode: Zurückführung auf Schnitt von Ebene ε mit Geraden
g(SA), g(SB), g(SC) (entweder punktweise mittels Deckgerade oder nach
einem gefundenen Punkt mittels Zentralkollineation mit Zentrum S 0 und
Achse e1 ).
2. Methode: Mittels Seitenriß auf projizierende Ebene β ⊥ ε.
Als „Umkehrung“ einer Durchdringungsaufgabe erscheint folgende
Prismenschnittaufgabe.
Gegeben: Gerades dreiseitiges Prisma Π durch Grund- und Aufriß und ein
Dreieck D̄ = ĀB̄ C̄.
Gesucht: Ebene ε, so daß die Schnittfigur ε ∩ Π ein zu D̄ ähnliches Dreieck
40
4 DARSTELLENDE GEOMETRIE
C0
C̄
α
D0
Ā
B0
B̄
D0
B0
A0
α0
A0
h0
C0
n0
Abbildung 11: Prismenschnittaufgabe
D = ABC wird.
Lösung: Der Grundriß A0 B 0 C 0 := Π ∩ π1 des Prismas kann als Grundriß des
gesuchten Dreiecks D aufgefaßt werden.
(1) An A0 B 0 zum Dreieck D̄ = ĀB̄ C̄ ähnliches Dreieck A0 B 0 C0 antragen mit
C0 ∈ A0 B 0 C 0 − .
(2) Mittelsenkrechte m zu C0 C 0 schneiden mit der Geraden g = g(A0 B 0 )
durch A0 , B 0 liefert M := g(A0 B 0 ) ∩ m.
(3) Kreis K mit Mittelpunkt M und Radius M C0 schneiden mit g liefert
{D 0 , E 0 } = K ∩ g(A0 B 0 ).
(4) Damit wird (Satz des Thales) ^(E 0 C 0 D 0 ), ^(E 0 C0 D 0 ) Rechtwinkelpaar
der Affinität, die das Dreieck A0 B 0 C 0 auf das Dreieck A0 B 0 C0 abbildet, welches aus der Umklappung von ABC um e1 = π1 ∩ ε = h0 in π1 und anschließender Ähnlichkeitsabbildung hervorgegangen zu denken ist.
(5) Nach Satz 4.2.1 muß eine der „Schenkelgeraden“ C 0 D 0 oder C 0 E 0 auf h0
(Höhenlinie) liegen. Entscheidung mittels Satz 4.2.1 (spitze Winkel) möglich
- hier (Abb. 11) |α0 | < |α|, also C 0 D 0 ⊆ h0 , woraus folgt |CD| = |C 0 D 0 |.24
(6) C 0 D 0 von C0 aus auf C0 D 0 + abtragen liefert D0 , und die zentrische
Streckung mit dem Zentrum C0 und dem Streckungsfaktor |C0 D0 |/|C0 D 0 |
liefert das zum Dreieck ABC kongruente Dreieck A0 B0 C0 , welches zum Dreieck A0 B 0 C0 also auch zum Dreieck ĀB̄ C̄ ähnlich ist.
(7) Zur Konstruktion des Aufrisses A00 B 00 C 00 wird die Profilebene zur Ebene
ε durch die Neigungslinie n = g(CE) ⊥ h um n0 in π1 umgeklappt, woraus
die Höhen von A und B gewonnen werden können.
24
O.B.d.A. Höhenlinie h = h0 = e1 durch C = C 0 , d. h. C ∈ π1
4.5 Axonometrie
4.5
4.5.1
41
Axonometrie
Grundlagen
Unter Axonometrie versteht man die Parallelprojektion auf eine Bildtafel π,
bei der ein räumliches kartesisches Koordinatensystem, in das der darzustellende Körper eingeordnet ist, mit abgebildet wird. Das hat den Vorteil, daß
längs der Achsen (d. h. parallel zu diesen) die Rekonstruktion der wahren
Längen möglich ist. Man unterscheidet zwischen normaler Axonometrie, bei
der die Projektionsrichtung orthogonal zu π ist (und keine Koordinatenachse parallel zu π), und schiefer Axonometrie, bei der die Projektionsrichtung
nicht orthogonal zu π ist (und eine oder zwei der Koordinatenachsen parallel zu π). Zur Charakterisierung der Abbildung genügt die Abbildung eines
orthonormierten Dreibeins.
Definition 1. a) Vier Punkte O0 , Ex0 , Ey0 , Ez0 bilden ein (nicht ausgeartetes) ebenes Dreibein (O0 ; O0 Ex0 , O0 Ey0 , O0 Ez0 ) :⇐⇒ O0 , Ex0 , Ey0 , Ez0 sind
koplanare aber nicht kollineare Punkte (in π).
b) Vier Punkte O, Ex , Ey , Ez ∈ R3 bilden ein orthonormiertes räumliches
Dreibein (O; OEx , OEy , OEz ) :⇐⇒ die Strecken OEx , OEy , OEz sind paarweise kongruent und orthogonal.
Satz 1. (Hauptsatz der Axonometrie, Satz von Pohlke25 ) Jedes nicht entartete ebene Dreibein ist Fernbild eines geeigneten orthonormierten räumlichen Dreibeins.
4.5.2
Normale Axonometrie
Nach den Voraussetzungen für die normale Axonometrie haben alle drei Achsen des räumlichen kartesischen Koordinatensystems einen Schnittpunkt mit
der Bildebene π.
Definition 2. Die Spurpunkte Sx := x ∩ π; Sy := y ∩ π und Sz := z ∩ π
der Koordinatenachsen bilden bei normaler Axonometrie das Spurdreieck.
Satz 2. (a) Das Spurdreieck ist spitzwinklig.
(b) Für die Bildfaktoren der Koordinatenachsen (Verkürzungsverhältnisse in
Achsenrichtung) gilt e2x + e2y + e2z = 2.
(c) Jedes spitzwinklige Dreieck kann als Spurdreieck interpretiert werden.
Folgerungen und Bemerkungen:
(1) Der Höhenschnittpunkt im Spurdreieck ist das (normaloxonometrische)
Bild O0 des Koordinatenursprungs O.
(2) Für die Bildfaktoren der Koordinatenachsen gilt: 0 < ex , ey , ez < 1.
25
Karl Wilhelm Pohlke, 1810 - 1876
42
4 DARSTELLENDE GEOMETRIE
π
O
cSx
Sz c
O0
=
j
Fz
x
c
z
Sy
W y
Abbildung 12: Spurdreieck
(3) Satz von Gauß: Ist (O0 ; Ex0 , Ey0 , Ez0 ) das Bild des orthonormierten räumlichen Dreibeins (O; Ex , Ey , Ez ) bei Normalprojektion in die Gaußsche Zahlenebene (O0 ; ξ, η) mit η = g(O0 Ez0 ), so gilt für die „komplexen Zahlen“
0 , e := E 0 und e := E 0
ex := EX
z
y
z
y
e2x + e2y + e2z = 0 und |ex |2 + |ey |2 + |ez |2 = 2.
In der Praxis werden spezielle Achsenrichtungen bzw. einfache Verkürzungsverhältnisse gewählt:
(A) Isometrie mit Verkürzungsverhältnissen q
ex : ey : ez = 1 : 1 : 1,
woraus mit e2x + e2y + e2z = 2 folgt ex = ey = ez = 23 , was durch den Wert
1 ersetzt wird.
6z
6z
0
0
z y0
x0 +
s y0
Isometrie
x0 =
Dimetrie
Abbildung 13: Normale Axonometrie
(B) Dimetrie
(Ingenieuraxonometrie)
√
√ mit ex : ey : ez = 1 : 2 : 2, woraus
1
2
folgt ex = 3 2 −→ 0.5 und ey = ez = 3 2 −→ 1.
4.5 Axonometrie
43
Grundaufgabe:
Gegeben: Verkürzungsverhältnisse ex , ey , ez mit 0 < ex , ey , ez < 1 und e2x +
e2y + e2z = 2.
Gesucht: Spurdreieck.
Beispiel: Konstruktion des Spurdreiecks der Ingenieuraxonometrie!
4.5.3
Schiefe Axonometrie
(A) Schrägrißverfahren (Frontale Axonometrie)
1. Zur Vereinfachung zwei Koordinatenachsen in die Bildebene π = ε(y, z),
also y = y 0 , z = z 0 und Ey = Ey0 , Ez = Ez0 (in y− und z−Richtung wahre
Längen).
2. Winkel α = ^(y 0 , x0 ) beliebig.
3. Ex0 ∈ x0 beliebig.
(A’) Kavalierperspektive
Spezialfall von (A) mit |α| = 135◦ , |O0 Ey0 | = ey = |O0 Ez0 | = ez = 1 und
|O0 Ex0 | = ex = 21 .
z = z0
6
α
- y = y0
Ex0
x0
Abbildung 14: Frontale Axonometrie
(B) Militärperspektive (Vogelperspektive)
Bildebene ist x − y−Ebene, ex = ey = ez := 1, |α| = 90◦ , Neigung der
x−Achse gegen die vertikale z 0 −Achse 60◦ . Vorteil: Originalgrundriß und
Originalhöhen!
(B’) Froschperspektive
Wie (B), aber Neigung der x−Achse gegen z 0 −Achse 135◦ .
44
4 DARSTELLENDE GEOMETRIE
z0
z0
6
6
y=y
0
]
x = x0
3
R
y = y0
V ogelperspektive
x = x0
F roschperspektive
Abbildung 15: Spezielle schiefe Axonometrien
Bemerkung: Eckhartsches Einschneideverfahren.
4.6
4.6.1
Kreisaufgaben
Grundlagen
Bei der Parallelprojektion der einfachsten nichtelementaren Körper (Zylinder, Kugel, Kegel) gehen die erzeugenden Kreise dieser Körper in Ellipsen
über.
Definition 1. Die Menge E aller Punkte einer Ebene, die von zwei festen
Punkten F1 , F2 dieser Ebene, den Brennpunkten, eine konstante Abstandssumme haben, heißt Ellipse.
Folgerungen und Bezeichnungen:
(0) Mit di := |P Fi | (i = 1, 2) wird für jeden Ellipsenpunkt P
d1 + d2 = const.
(1) Die Schnittpunkte A1 , A2 der Ellipse mit der Verbindungsgeraden
g(F1 F2 ) der Brennpunkte heißen Hauptscheitel der Ellipse.
(2) Der Mittelpunkt M der Strecke F1 F2 heißt Mittelpunkt der Ellipse.
(3) Die Schnittpunkte B1 , B2 der Ellipse mit der Mittelsenkrechten m
der Strecke F1 F2 heißen Nebenscheitel der Ellipse.
(4) Die Strecke A1 A2 bzw. deren Länge 2a heißt Hauptachse, die Strecke
B1 B2 bzw. deren Länge 2b heißt Nebenachse der Ellipse.
4.6 Kreisaufgaben
45
B1
P
.......................................................
.....................
.............
.............
...........
..........
.........
.........
........
.
.
.
.
.
.
.......
......
.
.
.......
.
.
.
....
......
.
.
.
.
.
......
....
.
.
......
.
.
....
.....
.
.
.
.
.....
....
.
.
....
.
...
....
.
.
.
...
..
.
.
...
...
...
.
.
...
.
.
...
2
...
.
...
1
..
...
.
...
..
.
...
..
.
...
....
...
...
..
..
..
..
...
..
...
.
...
...
...
..
.
...
.
.
.
...
...
...
1
2
...
...
..
...
..
...
.
.
.
...
...
...
...
...
...
...
...
...
.
.
...
...
....
....
....
...
.....
.....
.....
.....
.
......
.
.
.
.
......
......
......
......
.......
......
.......
.......
........
.......
.
.
.........
.
.
.
.
.
....
...........
..........
.............
..............
.....................
........................................................
d
A2
d
M
b
b
F
F
A1
b
B2
Abbildung 16: Ellipse
(5) Die Ellipse ist axialsymmetrisch bezüglich der Haupt- und der Nebenachse und folglich punktsymmetrisch bezüglich des Mittelpunktes M =
A1 A2 ∩ B1 B2 .
(6) Die Strecken M Ai bzw. deren Längen a := |Ai M | heißen große Halbachsen, die Strecken M Bi bzw. b := |M Bi | kleine Halbachsen.
(7) Aus (0) ergibt sich d1 + d2 = 2a und damit für die lineare Exzentrizität e := |M Fi | die Beziehung e2 = a2 − b2 .
(8) Ferner ergibt sich für die Gleichung der Ellipse in Mittelpunktslage
(M = Koordinatenursprung, Brennpunkte auf der x−Achse):
x2 y 2
+ 2 = 1.
a2
b
(9) In allgemeiner Lage gilt
xt Ax = a11 x2 + a22 y 2 + 2a12 xy + 2a13 x + 2a23 y + a33 = 0
mit |A| =
6 0, |A33 | > 0 und a11 |A| < 0 als spezielle Kurve zweiter Ordnung
(Kegelschnitt!).
46
4 DARSTELLENDE GEOMETRIE
Satz 1. (Hauptsatz der Parallelprojektion von Kreisen) Das Fernbild jedes Kreises, der nicht in einer projizierenden Ebene liegt, ist eine Ellipse.
Bemerkungen:
1. Andere Fassung von Satz 1: Das affine Bild eines Kreises ist eine Ellipse.
2. Die Bilder orthogonaler Kreisdurchmesser bei Parallelprojektion bzw.
affiner Abbildung heißen konjugierte Durchmesser der Ellipse; es gibt genau
ein rechtwinkliges Paar konjugierter Durchmesser (Haupt- und Nebenachse).
4.6.2
Ellipsenkonstruktionen
..........
....................... ..................................
...........
.........
.........
........
........
.......
.......
......
.
.
.
.
.
......
....
.
.
0
.
......
.
.
....
.....
.
.
.
.
.....
...
.
.
...
.
.
.
..
....
.
.
.
.
.
....
.
...
.
.
.
.
0
...
.
...
..
.
.
...
.
.
.
...
..
...
.
.
.
.
...
...
...
...
.
...
...
.
..
....
...
....
...
.......
...
...
..
...
...
...
...
.
....
..
.
...
..
....
..
....
..
...
.
...
...
.
.
..
...
..
....
.
...
0
....
...
..
..
..
..
...
...
..
..
...
..
..
...
.
....
..
.
...
..
..
...
..
...
..
...
...
...
..
...
.. ...
..
.. .....
...
..
.
.
..
.
...
... ...
...
................................
...
.. ..
.................
..........
...
...
.....
..........
........
...
...
........
.......
....
.
.
.
... ...........
.
.
.
...
......
0
...
.. ......
.....
..
... ..
.....
..
.......
... ...
....
...
... ..
.... ...
....
...
... .....
... ....
.
.
.
.
.
.
.
...
...
...
.
..
...
...
.... ...
...
...
...
...
..... ...
...
...
...
...
...... .....
.....
...
...
...
...............................
..
..
.
.
.
.
.
....
...
..
....
0
...
...
....
....
..
...
...
.....
..
....
.
.
.
.
.....
.
....
..
..........
.....
......
.
....
......
......
..
...
0 ...
......
.......
..
.
......
.......
....
..
.......
........ .
.... .................
...
..........
.
.............
...
..............................................................
...
.
0
... 0
...
...
..
.
...
...
...
...
...
..
...
...
...
.
.
...
..
...
...
...
...
....
....
....
...
.
.
.....
.
.
......
....
......
......
.......
......
........
.......
............
........
................................................
B
r M
K
B
A
r
K
A
M
e
Abbildung 17: Ellipsenkonstruktion mittels axialer Affinität
1. Konstruktion der Ellipse mittels axialer Affinität aus Kreis
Gegeben: Umklappung K0 eines Kreises K ⊆ ε um die Spur e der Ebene ε in
Bildebene π und (z. B.) Fernbild M 0 des Kreismittelpunktes M von K.
Gesucht: Fernbild K0 von K in π.
Lösung: Punktweise Konstruktion der Bildellipse K0 aus den Punkten von K0
4.6 Kreisaufgaben
47
vermöge der axialen Affinität α mit der Achse e und der Affinitätsrichtung
g(M0 M 0 ). Insbesondere ergeben sich die Hauptachsen der Bildellipse aus der
Konstruktion des Rechtwinkelpaares von α zu (M0 , M 0 ).
2. Tangentenachteck
Gegeben: Radius r eines Kreises K und ein Paar a0 , b0 konjugierter Halbmesser der Bildellipse K0 von K bei affiner Abbildung (Parallelprojektion).
Gesucht: Tangentenachteck an K0 .
Lösung: Betrachten orthogonales Radiuspaar a, b des Kreises und interpretieren die konjugierten Halbmesser a0 , b0 als Bilder von a, b bei einer Affinität
α. Damit ergibt sich aus dem regulären Tangentenachteck an K durch α ein
Tangentenachteck an K0 - vgl. Abb. 18.
b0
b
a
a0
A
M0
M
A0
Abbildung 18: Tangentenachteck
3. Schulkonstruktion
Gegeben: Halbachsen a = M A1 und b = M B1 einer Ellipse E.
Gesucht: E.
Lösung: Punktweise Konstruktion: Kreis K1 um M mit Radius b, Kreis K2
um M mit Radius a.
P2 ∈ K2 beliebig; Lot von P2 auf A1 A2 ergibt Lotfußpunkt F .
P1 := P2 M ∩ K1 .
Parallele zu A1 A2 durch P1 schneidet P2 F in P ∈ E.
Tangente t in P2 an K2 schneidet A1 A2 in T ; Gerade t0 durch T und P ist
Tangente in P an die Ellipse E.
4. Rytzsche Achsenkonstruktion26
Gegeben: Ein Paar konjugierter Halbmesser M D, M C einer Ellipse E.
26
David Rytz von Brugg, 1801 - 1868
48
4 DARSTELLENDE GEOMETRIE
t
.............................................
..........
........
........
.......
......
......
.....
.... 2
....
.
..
...
.
.
...
1
...
.
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
...
.
.
.
.
.
.
.......
.....
.
...
.
..
.
.
.
.
.
.
.
.....
...
....
..
.
.
.
.
.
...
...
..
.
.
.
....
...
...
...
..
.
.
..
..
...
...
....
.... 1
..
..
...
.
..
...
...
.
.
...
...
...
..
.
.
...
.
..
...
.
.
.
.
...
.
2 ....
.
.
.
.
.
...
.
...
.
.
.
.
.
.
...
...
....
....
...
...
......
.....
...
...
........
.....
..
...
..............................
...
...
.
.
...
1
...
....
...
...
...
.....
.....
......
.....
.
......
.
.
.
.......
...
.......
.........
................
.........
.............................
K
P2................
B
P
P
T
A
F
b
a
M
A1
K
Abbildung 19: Schulkonstruktion
Gesucht: Hauptachsen von E.
Lösung: - Strecke M D̄ ⊥ M D ∧ M D̄ ∼
= M D.
- E := Mitte der Strecke D̄C.
- Kreis um E mit Radius EM schneidet die Gerade g(C D̄) in A0 , B 0 .
+
- M A1 ∼
= A0 D̄ ∧ A1 ∈ M A0 .
+
- M B1 ∼
= A0 C ∧ B1 ∈ M B 0 .
- Dann sind M A1 und M B1 Halbachsen von E.
B.0............................
..................................
........
.......
......
..
.....
.....
.
.
....
.
...
.
...
.
...
...
.
...
..
...
.
..
...
.
...
..
.
...
....
..
..
...
...
...
..
....
1
...
...
...
....
...
.
.
...
..
.
...
...
...
...
...
...
...
...
...
.
.
....
....
....
....
.....
.....
......
......
.......
......
1
.
..........
.
.
.
.
.
.
......................................
D̄
D
B b
bE
C
M
bA
A
0
Abbildung 20: Rytzsche Achsenkonstruktion
5. Gärtner- und Papierstreifenkonstruktion
4.6 Kreisaufgaben
4.6.3
49
Anwendungen (Kegel und Zylinder)
Schnitt von geraden Kreiszylindern und geraden Kreiskegeln mit einer
Ebene in Zweitafelprojektion und in Kavalierperspektive.
Beispiel: Zylinder in Kavalierperspektive
Gegeben: Tangentenviereck des Grundkreisbildes eines geraden Kreiszylinders K gegebener Höhe in Kavalierperspektive.
Gesucht: Darstellung von K in Kavalierperspektive.
Lösung: (1) Konstruktion der Basisellipse k0 :
(1.1) Durch die Mittellinien des Tangentenvierecks sind zwei konjugierte
Halbmesser M A1 und M Z 0 der Ellipse gegeben. Daraus können die Hauptachsen von k0 konstruiert werden; dann ergibt sich k0 nach der Schulkonstruktion.
(1.2) k0 kann auch durch Konstruktion eines Tangentenachtecks gewonnen
werden.
(1.3) Am einfachsten wird k0 punktweise konstruiert als Bild des Kreises
k0 über dem Durchmesser A1 A2 (Umklappung des Basiskreises des Zylinders) bei der axialen Affinität α mit Achse g(A1 A2 ) und Affinitätsrichtung
G(Z0 Z 0 ): Punkte P0 ∈ k0 gehen in P 0 über vermöge zu Z0 Z 0 M ähnlicher
Dreiecke P0 P 0 F (P 0 F k Z 0 M ).
(2) Bestimmung der Konturlinien des Zylinders (Tangenten t an die Ellipse
k0 parallel zur z−Achse):
Bestimmung der Urbildrichtung von t bei der Abbildung α von (1.3): Lot
von Z 0 auf g(A1 A2 ) liefert Lotfußpunkt H; Tangente t0 an Kreis k0 parallel
zu g(HZ0 ) ist Urbild der gesuchten Konturlinie t durch den Ellipsenpunkt
P 0 = α(P0 ).
z
6
Z0
.........................................
.................
..........
..........
.........
........
.......
0
.......
......
.
.
.
.
.
......
...
.
.
.
.
......
.
....
.
.....
.
.
.
.....
....
.
.
.
.
...
.
....
....
...
...
...
0......
...
.
.
...
.
...
...
.
0
...
..
.
... 0
..
.
...
...
....
.
...
.
..
....
..
...
..
...
...
...
...
..
...
.
...
t
t
k
Z
A2
M
H
y
-
P
P0
F A1
x0
Abbildung 21: Zylinder in Kavalierperspektive I
50
4 DARSTELLENDE GEOMETRIE
...............................................................................
...................
.......
..............
....
............
.
...
.
.
.
.
.
.
.
.
...
.........
...
.......
.
.
..
.
.
.
.
..
....
.
.
.
.
.
.
.
.
.
...
.
.....
.
.
.
.
.
.
.
..
.
......
...
.......
.....
........
.........
...
..........
.
.
.....
.
.
.
.
.
.
.
.
.
...
........
................
.............
.............................................................................
6
......................................
...................................
..........
.................
.......
..............
....
............
.
..........
.
.
.
.
.....
.
.
.
.
.................... ....
.
.
.
......
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.............
....
.
.
.
.
.
.
.
.
.
.
.
...
.
.
.
.
.
.
.
.
.
.
.
.
...
.............
.
....
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.......
......
...................
....
.......
...................
...
.......
...................
......................
.........
..........
.
.
....
.
.
.
.
.
.
.
.
.......
.....
...........
..............
......................................................................................
-
Abbildung 22: Zylinder in Kavalierperspektive II
4.7
Zentralprojektion
Bei der Zentralprojektion ist das Projektionszentrum O (Auge, Augpunkt)
ein eigentlicher Punkt, der nicht in der Bildebene π liegt. Dann gibt es eine
ganze Ebene durch O, für welche die Projektionsabbildung α nicht definiert
ist (vgl. S. 32).
Definition 1. a) Die Ebene πv durch das Zentrum O parallel zur Bildebene π heißt Verschwindungsebene.
b) Der Schnittpunkt Gv := g ∩ πv einer Geraden g mit der Verschwindungsebene heißt Verschwindungspunkt von g.
c) Das Bild G0 des Fernpunktes G∞ einer Geraden g heißt Fluchtpunkt von
g.27
Hilfssatz 1. a) Die Zentralbilder paralleler Geraden schneiden sich im
gemeinsamen Fluchtpunkt der beiden Geraden.
b) Die Zentralbilder zweier Geraden sind genau dann parallel, wenn ihre Verschwindungspunkte von O verschieden, aber mit O kollinear sind.
Satz 1. (Hauptsatz der Zentralprojektion)
a) (Fluchtliniensatz) Die Fluchtpunkte aller Geraden in derselben Ebene ε
liegen auf einer Geraden, der Fluchtlinie von ε.
b) (Fluchtpunktsatz) Der Fluchtpunkt der Schnittgeraden zweier Ebenen ist
der Schnittpunkt der Fluchtlinien dieser Ebenen.
c) (Winkelsatz) Die Fluchtpunkte G0 , H0 zweier Geraden g, h werden vom
Auge O aus unter einem Winkel gesehen, der zum Schnittwinkel dieser Geraden kongruent ist: ^(G0 OH0 ) ∼
= ^(g, h).
Bei der freien Perspektive oder Distanzpunktperspektive wird von der Vor27
Projektive Interpretation: α(G∞ ) = G0 , α(Gv ) = Fernpunkt von g 0
4.7 Zentralprojektion
51
g0
P0 c
π
g
sO
G c
G0 c
Abbildung 23: Zentralprojektion
stellung ausgegangen, daß die Bildebene π senkrecht zu einer horizontalen
Bodenebene γ steht; der Horizont u ist dann die Fluchtlinie aller zu γ parallelen Ebenen, die Vertikale v die Fluchtlinie aller zu π und γ senkrechten
Ebenen.
Der Schnittpunkt H := u ∩ v von Horizont und Vertikale heißt Hauptpunkt,
der Fußpunkt Ȯ des Lotes vom Auge O auf die Bodenebene γ heißt Standpunkt, der Abstand d := |OH| Distanz, der Abstand |OȮ| Aughöhe.
Der Kreis ∆ ⊆ π um H mit Radius d heißt Distanzkreis; er besteht aus allen
Fluchtpunkten von Geraden, welche die Bildebene unter einem Winkel von
45◦ treffen. Die Schnittpunkte D1 , D2 des Horizontes mit ∆ heißen Distanzpunkte, der Kreis Σ um H mit Radius d/2 heißt Sehkreis.
Es gilt dann die Malerregel: Das ruhende Auge erfaßt den Sehkreis, das
bewegte Auge den Distanzkreis.
Anwendungen (Beispiele):
Parkett aus regulären Sechsecken. Konstruktion aus dem Bild A0 B 0 einer
Seite AB durch Anwendung des Winkelsatzes (vgl. Abb. 25).
Frontansicht eines Hauses. Konstruktion eines Reihenhauses als Anwendung des Fluchtpunktsatzes (vgl. Abb. 26).
52
4 DARSTELLENDE GEOMETRIE
v
v
...............................................
.........
........
.......
......
......
......
.....
.
.....
.
.
.
....
....
.
.
....
..
.
...
.
...
...
.
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.......
...
.....
.
.
..
.
.
.
.
.
.
...
.
.....
....
..
.
...
.
.
.
.
...
..
...
.
.
....
...
..
..
.
.
...
..
...
...
...
....
..
..
.
.
.
1 ..
.
..
...
..
...
...
...
..
.
...
...
...
..
..
.
.
..
.
...
.
.
.
.
.
...
...
...
....
...
...
....
.....
...
...
.....
......
..
...
......
..........
...
........................
...
.
.
...
..
...
...
....
....
....
...
.....
.....
.
.
......
.
.
....
.......
......
........
........
...........
..........................................
u
∆
d
H
Σ
O
Ȯ
π
u
D
γ
H
Abbildung 24: Distanzpunktperspektive
b O∗
0
60
G1
G2
bH
A0
B0
Abbildung 25: Sechseckparkett in Zentralprojektion
G3
D2
4.7 Zentralprojektion
H1
H2
v
H
Abbildung 26: Frontansicht eines Reihenhauses
53
54
ABBILDUNGSVERZEICHNIS
Abbildungsverzeichnis
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
Koordinatenaddition . . . . . . . . . . . . . . . . .
Axiom von Desargues . . . . . . . . . . . . . . . .
Koordinatenmultiplikation . . . . . . . . . . . . . .
Axiom von Pappos . . . . . . . . . . . . . . . . . .
Projektiver Satz von Desargues . . . . . . . . . . .
Dualisierung des projektiven Satzes von Desargues
Dritter Kongruenzsatz . . . . . . . . . . . . . . . .
Grundaufgabe (a) . . . . . . . . . . . . . . . . . . .
Drehung in Frontlage . . . . . . . . . . . . . . . . .
Schnitt von Gerade und Ebene . . . . . . . . . . .
Prismenschnittaufgabe . . . . . . . . . . . . . . . .
Spurdreieck . . . . . . . . . . . . . . . . . . . . . .
Normale Axonometrie . . . . . . . . . . . . . . . .
Frontale Axonometrie . . . . . . . . . . . . . . . .
Spezielle schiefe Axonometrien . . . . . . . . . . .
Ellipse . . . . . . . . . . . . . . . . . . . . . . . . .
Ellipsenkonstruktion mittels axialer Affinität . . . .
Tangentenachteck . . . . . . . . . . . . . . . . . . .
Schulkonstruktion . . . . . . . . . . . . . . . . . . .
Rytzsche Achsenkonstruktion . . . . . . . . . . . .
Zylinder in Kavalierperspektive I . . . . . . . . . .
Zylinder in Kavalierperspektive II . . . . . . . . . .
Zentralprojektion . . . . . . . . . . . . . . . . . . .
Distanzpunktperspektive . . . . . . . . . . . . . . .
Sechseckparkett in Zentralprojektion . . . . . . . .
Frontansicht eines Reihenhauses . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
8
9
9
10
12
13
20
36
38
38
40
42
42
43
44
45
46
47
48
48
49
50
51
52
52
53
Index
Archimedes, 3, 21
Bólyai, J., 22
Desargues, G., 8
Descartes, R., 4
Dürer, A., 4
Euklid, 3
Gauß, C. F., 22
Gödel, K., 5
Hilbert, D., 4
Klein, F., 4, 32
Legendre, A. M., 23
Lobatschewski, N. I., 22
Monge, G., 4
Pappos, 10
Pasch, M., 15
Platon, 3
Pohlke, K. W., 41
Pythagoras, 3
Rytz, D., 47
Thales, 3
Vitruv, 4
Wedderburn, J. H. M., 10
Axiomensystem, 5
Axonometrie, 41
frontale, 43
normale, 41
schiefe, 43
Bewegung, 21, 26
analytische Beschreibung, 27
eigentliche, 25
räumliche, 27
uneigentliche, 25
Bildebene, 33
Bildfaktor, 34
Brennpunkt, 44
Dimetrie, 42
Distanz, 51
Distanzkreis, 51
Distanzpunkte, 51
Distanzpunktperspektive, 50
Doppelverhältnis, 32
Drehspiegelung, 28
Drehung, 25
im Raum, 28
Dreibein
ebenes, 41
orthonormiertes räumliches, 41
Dreieck, 18
gleichschenkliges, 19
Dreiecksfläche, 18
Dualitaätsprinzip, 12
Durchmesser, konjugierte, 46
absolute Geometrie, 22
Addition von Punkten, 8
Ähnlichkeitsabbildung, 29
äquiaffine Abbildungen, 31
affine Abbildung, 30
affine Inzidenzebene, 6
desarguessche, 8
Ordnung, 7
affine Koordinatenebene, 7
affines Axiom von Desargues, 8
affines Axiom von Pappos, 10
Affinität, 30
Anordnungsaxiome, 15
Aufrißebene, 36
Augpunkt, 50
Außenwinkel, 18
axiale Affinität, 31
Axiom von Pasch, 15
Ebenenspiegelung, 28
Eichstrecke, 22
Eintafelprojektion, 35
Elementarwinkel, 17
Ellipse, 44
Erlanger Programm, 4, 32
euklidische Geometrie, 22
Fahne, 16
55
56
Fluchtlinie, 50
Fluchtliniensatz, 50
Fluchtpunkt, 50
Fluchtpunktsatz, 50
Frontlinie, 37
Froschperspektive, 43
gerichtete Strecke, 24
gleichorientiert, 24
Gleitspiegelung, 26, 28
Grundrißebene, 36
Gruppe, 5
Halbebene, 16
Hauptgruppe, 29
Hauptlinie, 34
Hauptpunkt, 51
Hauptsatz der Normalprojektion,
35
Hauptsatz der Parallelprojektion,
34
Hauptsatz der Parallelprojektion von
Kreisen, 46
Hauptsatz der Zentralprojektion, 50
Hauptsatz der Zweitafelprojektion,
37
Hauptscheitel, 44
Höhenlinie, 35
Horizont, 51
hyperbolische Geometrie, 22
Innenwinkel, 18
Inzidenzaxiome, 14
Inzidenzraum, 6
Inzidenzstruktur, 6
Isometrie, 42
Kavalierperspektive, 43
Körper, 7
kollinear, 6
komplanar, 14
Kongruenzaxiome, 17
Kongruenzsatz
vierter, 21
dritter, 19
INDEX
erster, 18
zweiter, 18
Kongruenztransformation, 21
konvex, 17
Koordinatengerade, 8
Länge, 22
Längenfunktional, 22
Legendresche Sätze, 23
Malerregel, 51
Maßeinheit, 22
Maßzahl, 22
Meter, 22
Militärperspektive, 43
Mittelpunkt, 21
Multiplikation von Punkten, 9
Nebenscheitel, 44
Nebenwinkel, 18
Neigungslinie, 35
Neigungswinkel, 35
normale Axonometrie, 41
Normalprojektion, 35
Ordnungslinie, 37
Orientierung, 24
Orthogonalstreckung, 30
pappossche Ebene, 11
parallel, 6, 15
Parallelenaxiom, 22
parallelgleich, 24
Parallelprojektion, 33
Perspektive, freie, 50
Prismenschnittaufgabe, 39
Profilebene, 35
Projektion, 33
Projektionsgerade, 34
Projektionsrichtung, 33
projektive Ebene, 31
projektive Inzidenzebene, 11
Ordnung, 12
projektive Transformation, 32
projektiver Abschluß, 11
INDEX
57
projektiver Satz von Desargues, 12
projizierende Ebene, 34
Vertikale, 51
vollständig, 5
Radialstreckung, 29
Ring, 7
Rißachse, 37
Rytzsche Achsenkonstruktion, 47
widerspruchsfrei, 5
windschief, 15
Winkel, 17
gestreckter, 18
rechter, 18
spitzer, 18
stumpfer, 18
Winkelsatz, 50
Satz vom Außenwinkel, 20
Satz vom Drachenviereck, 19
Satz vom gleichschenkligen Dreieck, 19
Satz vom Rechtwinkelpaar, 31
Satz von den 3 Spiegelungen, 27
Satz von Pohlke, 41
Scheitelwinkel, 18
schiefe Axonometrie, 41
Schiefkörper, 7
Schrägrißverfahren, 43
Schraubung, 28
Schulkonstruktion, 47
Sehkreis, 51
Spiegelung, 26, 28
Spurdreieck, 41
Spurgerade, 34
Spurpunkt, 34
Standpunkt, 51
Stauchungsfaktor, 35
Stetigkeitsaxiome, 21
Strahl, 16
Strecke, 16
Stützdreieck, 35
Tangentenachteck, 47
Teilverhältnis, 30
Translation, 25, 27
Umklappung, 34
unabhängig, 5
uneigentliche Bewegung, 25
Vektor, 24
Verschiebung, 25, 27
Verschwindungsebene, 50
Verschwindungspunkt, 50
Zentralkollineation, 32
Zentralprojektion, 33
zentrische Streckung, 29
Zweitafelprojektion, 36
Zwischenrelation, 15