Stromverdrängung in rechteckigen Leitern (z. B
Werbung

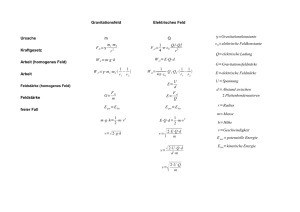
Vorlesung "Elektrische Maschinen" 04.12.2008 Seite 1 von 2 Stromverdrängung in rechteckigen Leitern (z. B. Stromverdrängungsläufer) Formelzeichen x, y, z HX, BX, H, B SZ, EZ, S, E = 1/ f, I h, b, l x Ortskoordinaten magnetische Feldstärke bzw. Flussdichte in x-Richtung elektrische Stromdichte bzw. Feldstärke in z-Richtung Permeabilität des (Nicht-Eisen-) Leiters spezifische Leitfähigkeit (= 1/spez. Widerstand) des Leiters Frequenz bzw. Kreisfrequenz gesamter Strom Nuthöhe, Nutbreite, Nutlänge komplexe Größen sind unterstrichen Nützliche Formel für komplexe Zahlen: (1 j )2 2 j z z l 0 l 0 x 0 Sz(y) Hx(y) Eisen μ Leiter 0 x dy EEZ(y) Z(y) Hx(y) dy EZ(y+dy) Hx(y+dy) h h y Durchflutungsgesetz Für den dargestellten Leiter in einer Nut z. B. des Läufers einer Asynchronmaschine ergibt sich zunächst aus dem Durchflutungsgesetz: H X ( y ) H X ( y dy ) SZ ( y ) dy dH X ( y ) SZ ( y ) dy Dabei ist angenommen, dass das H-Feld parallel zum Nutgrund verläuft. Nur in einer schmalen Zone zum Luftspalt hin trifft diese Annahme weniger gut zu. Entsprechend gilt für die elektrische Feldstärke nach dem Induktionsgesetz unter Berücksichtigung der Lenz'schen Regel für das Vorzeichen: dH X ( y ) dy dt dEZ ( y ) dH X ( y ) 0 dy dt EZ ( y ) EZ ( y dy ) 0 Der Zusammenhang zwischen E und S ist durch das Materialgesetz (ohmsches Gesetz in spezifischen Größen) gegeben: SZ EZ Alle physikalischen Größen kommen nur jeweils in einer der drei Koordinaten vor, der Index für die Koordinate kann also zur Abkürzung entfallen. Man beschränkt sich meist auf sinusförmige y Induktionsgesetz Größen, dann ist der Übergang in die komplexe Darstellung vorteilhaft, weil dann aus der partiellen Differenzialgleichung eine gewöhnliche Differenzialgleichung wird. Formal wird d/dt durch j ersetzt, man erhält dann d 2 E( y ) 2 j j 0 E( y ) 2 E( y ) 2 dy d 2 H( y ) 2 j j 0 H( y ) 2 H( y ) 2 dy mit der Abkürzung 1 f 0 was sich später als Eindringmaß als sehr nützliche und anschauliche Größe erweisen wird. Die Lösung der Differenzialgleichung ist einfach mit einem Exponential-Ansatz zu finden und für die allgemeine Lösung sind entsprechend dem Grad des Differenzials hier zwei Konstanten erforderlich, die durch die Randbedingungen zu ermitteln sind. Eine Formulierung der Lösung ist: H c1 e E 1 j y c2 e j 2 1 j 1 j y y y 1 j 1 j c1 e c2 e Prof. Dr.-Ing. G. Ackermann, Technische Universität Hamburg-Harburg, Institut für Elektrische Energiesysteme und Automation, Eißendorfer Str. 38, 21073 Hamburg Vorlesung "Elektrische Maschinen" 04.12.2008 Am Nutgrund muss H = 0 sein. Nimmt man den gesamten Strom I als gegeben an (wenn andere Größen gegeben sind ändert sich alles nur um eine Konstante), dann ist bei y = 0 durch das Durchflutungsgesetz Hb = I die zweite Gleichung gegeben. Die Konstanten c1 und c2 sind somit aus folgenden beiden Gleichungen zu bestimmen: 0 c1 e 1 j h c2 e 1 j I c2 b e e 1 j h e 1 j 1 j 1 j h e h h 1 j h Für eine sehr niedrige Frequenz und damit verbunden ein sehr großes Eindringmaß kann man die e-Funktionen approximieren nach ex 1+x. Dann folgt nach wenigen Umrechnungen aus diesen Gleichungen der bekannte lineare Verlauf: H( y ) H(0 ) hy h Für die elektrische Feldstärke folgt der bekannte Zusammenhang entsprechend der Berechnung des ohmschen Widerstandes eines langen geraden Leiters: j 2 1 j y c1 c2 c1 c2 1 j E j 2 1 j H(0 ) y H(0 ) 1 j 1 j h E I b h E Wesentlich informativer ist der Fall einer sehr (unendlich) tiefen Nut. Dann muss c2 = 0 sein, anderenfalls würden die Feldgrößen unendlich. H H(0 ) e 1 j y y U E j 2 I 1 j b U (1 j ) I b Der Stab entspricht also einer Reihenschaltung eines Widerstandes mit einer Induktivität, wobei der Widerstand genau durch den mit dem Eindringmaß gebildeten Querschnitt bestimmt ist. Man kann also ersatzweise annehmen, dass der Strom in einer Schicht mit der Dicke konzentriert ist. Die Reaktanz der Induktivität ist ebenso groß wie der ohmsche Widerstand, deshalb ist die Phasenverschiebung genau 45°. h e e 1 j Die Spannung längs des Stabes, die man mit einem Voltmeter vom Luftspalt her messen könnte, folgt aus Feldstärke für y = 0: h Das ergibt: I c1 b gegenüber der Oberfläche beträgt 1 rad, also klingt die von der Oberfläche eindringende Welle bereits in weniger als ¼ Periode auf 1/e ab. I c1 c2 b Seite 2 von 2 I 1 j e b E j 2 I 1 j e 1 j b S j 2 I 1 j e 1 j b y y Daraus wird jetzt nachträglich die Bedeutung des Eindringmaßes klar: In der Tiefe hat der Betrag aller Größen um den Faktor 1/e abgenommen. Die Phasenverschiebung Zahlenwerte: Kupfer: = 9,5 mm für 50 Hz Aluminium: 13 mm für 50 Hz Eisen (r >> 1) bei 0,1 mm für 50 Hz Ergänzung: a) Die angeführten Gleichungen gelten in ähnlicher Form auch für den Fall, dass das Magnetfeld und nicht der Strom eingeprägt ist. Daraus ist deutlich, warum Magnetkerne für wechselnde Magnetfelder nicht aus massivem Eisen sein dürfen, das Magnetfeld würde ja nur in der obersten Schicht entsprechend dem sehr kleinen Eindringmaß verlaufen. Bei elektrischen Maschinen werden die Kerne aus gegeneinander isolierten Blechen von 0,25 mm bis 0,35 mm (seltener 0,5 mm) aufgebaut. Da das Magnetfeld an beiden Oberflächen verläuft, durchsetzt das Feld dieses dünne Blech praktisch vollkommen. b) Ab Frequenzen von wenigen kHz müssten die Bleche unpraktikabel dünn sein. Man verwendet dann Ferrit, einen Sinter-Werkstoff aus "Eisenkrümeln", der kaum elektrisch leitet (=> Eindringmaß groß), aber leider auch eine kleinere Permeabilität und eine kleinere Sättigungsflussdichte als Eisenblech hat. c) Die hier angeführten Gleichungen sind immer dann anwendbar, wenn das Eindringmaß wesentlich kleiner ist als die geometrische Abmessung. Im entgegengesetzten Fall kann die Stromverdrängung ohnehin vernachlässigt werden. Der Übergangsbereich ist nur selten von praktischem Interesse. Wenn eine Schätzung zwischen unendlicher und sehr kleiner Eindringtiefe nicht ausreicht, dann sind oft auch andere Randeffekte von erheblicher Bedeutung und man setzt numerische Rechenverfahren ein. Prof. Dr.-Ing. G. Ackermann, Technische Universität Hamburg-Harburg, Institut für Elektrische Energiesysteme und Automation, Eißendorfer Str. 38, 21073 Hamburg