hyperbolische symmetrien
Werbung

HYPERBOLISCHE SYMMETRIEN
Nina Dietsche
Robert Papin
Technische Universität München
Seminar: Kombinatorische und Algebraische Strukturen in der Geometrie
Prof. Dr. Dr. Jürgen Richter-Gebert
Dipl.-Inf. Martin von Gagern
im Sommersemester 2010
Zusammenfassung:
Die Hyperbolische Geometrie ist nicht nur aus historischen Gründen
- als Alternativmodell zur Euklidischen Geometrie - interessant. Sie
zeichnet sich auch durch interessante Querverbindungen zur komplexen Analysis, zur Algebra und Gruppentheorie sowie zur Differentialgeometrie und niedrigdimensionalen Topologie aus. Die folgende Arbeit beschäftigt sich mit den Grundlagen der hyperbolischen Geometrie und führt von den unterschiedlichen Repräsentationsmodellen über
die Isometrien in der hyperbolischen Ebene hin zu den hyperbolischen
Symmetrien.
2
”Wer die Geometrie begreift, vermag in dieser Welt alles zu verstehen.”
(Galileo Galilei)
INHALTSVERZEICHNIS
3
Inhaltsverzeichnis
1 Einführung
1.1 Axiome der euklidischen Geometrie . . . . . . . . . . . . . . .
1.2 Notwendigkeit des Parallelenaxioms . . . . . . . . . . . . . .
1.3 Nichteuklidische Geometrien . . . . . . . . . . . . . . . . . . .
4
5
5
6
2 Modelle der hyperbolischen Geometrie
2.1 H + -Modell . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Poincaré’sches Einheitskreisscheibenmodell E . . . . . . . . .
2.3 Beltrami-Klein Modell . . . . . . . . . . . . . . . . . . . . . .
9
9
10
12
3 Isometrien und Möbiustransformationen
13
3.1 Isometrien in der hyperbolischen Ebene . . . . . . . . . . . . 13
3.2 Isometrien von E, Möbiustransformationen . . . . . . . . . . 15
4 Hyperbolische Spiegelungen und Drehungen
17
4.1 Spiegelungsgruppen . . . . . . . . . . . . . . . . . . . . . . . 18
4.2 Hyperbolische Parkettierungen . . . . . . . . . . . . . . . . . 19
4.3 Drehgruppen . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
5 Hyperbolische Ornamente
20
6 Ausblick
21
1
EINFÜHRUNG
1
4
Einführung
Euklid von Alexandria (ca. 360 v. Chr. bis ca. 280 v. Chr.) war ein griechischer Mathematiker. Sein Werk ”Elemente” (griech. Stoicheia) ist über
2000 Jahre alt und bis in das letzte Jahrhundert das meistverkaufte Werk
nach der Bibel. Es kann mit Recht als eines der bedeutendsten Werke der
mathematischen Literatur betrachtet werden. Die ”Elemente” bestehen aus
insgesamt 13 Lehrbüchern1 , die sich mit unzähligen Themen u.a. aus den
folgenden mathematischen Gebieten beschäftigen:
• Ebene Geometrie
• Proportionalitätslehre
• Ähnlichkeitslehre
• Zahlentheorie
• Irrationalitäten
• Raumgeometrie
Hierbei muss erwähnt werden, dass die ”Elemente” inhaltlich nicht die eigene Leistung Euklids darstellen, sondern dieser vielmehr wichtige mathematische Grundlagen aus älteren Schriften zusammengetragen und - darin
besteht die eigentliche Leistung Euklids - in einer didaktisch ansprechenden
Weise systematisch präsentiert hat.
Das Werk baut auf insgesamt 23 Definitionen und fünf sogenannten Postulaten, den Axiomen der euklidischen Geometrie, auf. Bemerkenswert ist,
dass allein daraus alle 465 Sätze der ”Elemente” hergeleitet werden können.
Abbildung 1: Euklid von Alexandria2
1
2
[On1] http://did.mat.uni-bayreuth.de/mmlu/pythagoras/lu/elemente.html
[On2] http://www.im-blog.com/biographien/euklid-von-alexandria/
1
EINFÜHRUNG
5
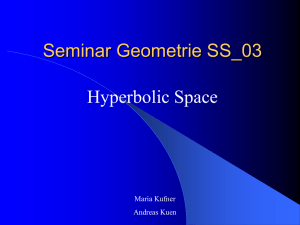
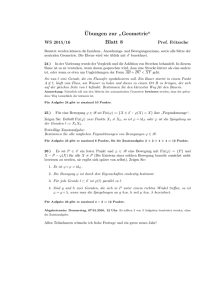
Abbildung 2: Parallelenaxiom
1.1
Axiome der euklidischen Geometrie
Die fünf Axiome lauten im Einzelnen wie folgt3 :
1. Es ist möglich, eine Strecke von jedem beliebigen Punkt zu einem
anderen Punkt zu zeichnen.
2. Es ist möglich, eine Strecke beliebig zu erweitern.
3. Es ist möglich, einen Kreis mit beliebigem Mittelpunkt und Radius zu
zeichnen.
4. Alle rechten Winkel sind gleich.
5. Wenn eine Strecke zwei Strecken schneidet und die Innenwinkel auf der
gleichen Seite (in der Summe) weniger als zwei rechte Winkel sind, so
treffen sich die zwei Strecken auf der Seite, auf der die Winkel weniger
als zwei rechte Winkel sind (Parallelenaxiom).
Bemerkungen:
• Im Folgenden bezeichnen wir eine in beide Richtungen ins Unendliche
erweiterte Strecke als Gerade.
• Vereinfacht ausgedrückt besagt das Parallelenaxiom, dass es zu einer
gegebenen Geraden g und einem Punkt P , der außerhalb dieser Geraden liegt, höchstens eine parallele Gerade geben kann (siehe hierzu
die Abbildung 2).
1.2
Notwendigkeit des Parallelenaxioms
Auffallend ist, dass sich das fünfte euklidische Axiom in seiner Komplexität
wesentlich von den anderen vier Axiomen unterscheidet. Für mehr als 2000
Jahre stellte man sich die Frage, ob dieses Axiom (unter anderem evtl. auch
wegen der Komplexität) für die Definition der euklidischen Geometrie entbehrlich ist, diese also allein aus den ersten vier Axiomen aufgebaut werden
3
[Scr] Scriba, Christoph J., Schreiber, Peter: 5000 Jahre Geometrie: Geschichte, Kulturen, Menschen (Vom Zählstein zum Computer). 2. Auflage. Springer, 2005
1
EINFÜHRUNG
6
kann. Viele berühmte Mathematiker (z.B. Archimedes, Lambert, Legendre) scheiterten am Parallelenproblem 4 . Viele Versuche scheiterten allein an
der Tatsache, dass die Beweise Aussagen enthielten, die alle äquivalent zum
Parallelenaxiom sind, nach [On4] z.B.
• Zu jeder Geraden g und jedem Punkt P , der nicht auf g liegt, gibt es
genau eine Gerade durch P , die g nicht schneidet.
• Es gibt ein Rechteck (ein Viereck mit vier rechten Winkeln).
• Die Winkelsumme in jedem Dreieck ist 180◦ .
• Es gibt ähnliche Dreiecke, d.h. Dreiecke bei denen entsprechende Winkel übereinstimmen, aber nicht entsprechende Seiten.
Eine weitere äquivalente Aussage ist beispielsweise der Satz des Pythagoras: Die Summe der Kathetenquadrate in einem rechtwinkligen Dreieck ist
gleich dem Hypotenusenquadrat. Hier kann man sofort auf die Metrik eines
nicht-euklidischen Raumes schließen: diese kann nicht durch den Satz des
Pythagoras gegeben sein.
1.3
Nichteuklidische Geometrien
Der berühmte Mathematiker Carl Friedrich Gauß erkannte als Erster, dass
das Parallelenproblem grundsätzlich unlösbar ist, veröffentlichte seine Erkenntnisse aber nicht. János Bolyai und Nikolai Ivanowitsch Lobatschweski
gelang im Jahr 1825 (unabhängig voneinander und fast zeitgleich) die Konstruktion einer Geometrie aus den ersten vier Axiomen, in denen das fünfte
Axiom nicht gilt5 . Man erhält also nicht-euklidische Geometrien, indem man
das Parallelenaxiom verändert. Die grundlegenden Änderungsmöglichkeiten
sind nach [On4]:
1. Zu jeder Geraden g und jedem Punkt P , der nicht auf g liegt, gibt es
unendlich viele Geraden durch P , die g nicht schneiden.
2. Zu jeder Geraden g und jedem Punkt P , der nicht auf g liegt, gibt es
keine einzige Gerade durch P , die g nicht schneidet.
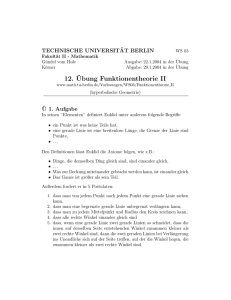
Die Abbildung 3 veranschaulicht den ersten Fall. Durch die entsprechende
Abänderung des fünften Axioms erhält man eine hyperbolische Geometrie.
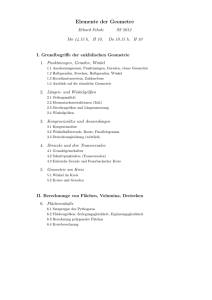
Den zweiten Fall kann man sich beispielsweise zweidimensional durch die
Geometrie auf einer Kugeloberfläche (S 2 ) vor Augen führen, wie in Abbildung 4 dargestellt. Durch die Abänderung des fünften Axioms erhält man
4
[On3] http://eom.springer.de/f/f040110.htm
[Hen] Hentschel, Klaus: Vorlesung über die nicht-euklidische Geometrie. Universität
Stuttgart, 2010
5
1
EINFÜHRUNG
7
Abbildung 3: unendlich viele parallele Geraden zu L durch P 6
Abbildung 4: elliptische Geometrie auf der Kugeloberfläche7
hier eine elliptische Geometrie.
An dieser Stelle soll noch kurz auf zwei wichtige geometrische Begriffe im
Kontext des hyperbolischen und elliptischen Falls eingegangen werden: die
Parallelität zweier Geraden und die Winkelsumme im Dreieck.
Die Parallelität zweier Geraden bedeutet im hyperbolischen Fall lediglich,
dass sie keine gemeinsamen Punkte haben, jedoch nicht, dass sie überall den
gleichen Abstand haben sowie keinen gemeinsamen Fernpunkt. Dies werden
wir im folgenden Kapitel noch näher beleuchten. Im elliptischen Fall existieren keine parallelen Geraden. Das wiederum kann man sich sehr schön auf
der Kugeloberfläche klar machen: Geraden sind Großkreise, die durch die
beiden Pole der Kugel verlaufen. Sie schneiden sich stets in zwei Punkten,
6
7
pdf
[On4] http://kortenkamps.net/papers/2000/Euklidisch-NichtEuklidisch.pdf
[On5]http://www.hopfenwiesen.de/download/sphaerGeometriePraesentation.
1
EINFÜHRUNG
8
den beiden Polen, und sind somit nicht parallel (siehe Abbildung 4).
Während die Winkelsumme im elliptischen Fall stets größer als 180◦ ist,
so hat die Winkelsumme im hyperbolischen Dreieck stets einen Wert, der
kleiner als 180◦ ist. Wie es dazu kommt, werden wir uns ebenfalls in einem
späteren Kapitel vor Augen führen.
Um ein erstes Verständnis für die hyperbolische Geometrie zu erlangen,
beschäftigen wir uns im kommenden Kapitel zunächst mit ein paar grundlegenden Modellen, welche die Basis für alle noch folgenden Betrachtungen
darstellen werden.
2
MODELLE DER HYPERBOLISCHEN GEOMETRIE
2
9
Modelle der hyperbolischen Geometrie
Zur Veranschaulichung der hyperbolischen Geometrie existieren zahlreiche
Modelle. Um den Rahmen dieser Arbeit nicht zu sprengen, werden wir im
Folgenden drei grundlegende Modelle betrachten. Jedes dieser Modelle benutzt Elemente der euklidischen Geometrie, jedoch jeweils in einem ganz
anderen Zusammenhang. So kann beispielsweise ein Polygon in jedem der
Modelle verschiedenartig aussehen, und das, obwohl es dieselbe Punktmenge beschreibt. Dies ist darauf zurückzuführen, dass jedem der betrachteten
Modelle eine andere Metrik zugrunde liegt8 .
Es ist möglich, zwischen den einzelnen Modellen umzurechnen, wobei Aussagen in rein hyperbolischer Geometrie vom verwendeten Modell unabhängig
sind. Es ist wichtig, sich für alle weiteren Betrachtungen stets vor Augen
zu halten, dass es nur eine (abstrakte) hyperbolische Geometrie gibt, jedoch
mehrere Modelle existieren, um diese darzustellen.
2.1
H + -Modell
Abbildung 5: H + -Modell9
Das erste Modell, welches wir behandeln, ist das Grundmodell H + (auch
Minkowski-Modell genannt). Es verwendet als Punktmenge die Oberfläche
des rechten zweischaligen Hyperboloids, der durch die Gleichung x21 + x22 −
x20 = −1 gegeben ist. Die Abbildung 5 veranschaulicht dies.
Hyperbolische Geraden sind im H + -Modell Hyperbeln, die durch Schnitte
von durch den Ursprung verlaufenden euklidischen Ebenen mit dem Hyperboloid entstehen.
Der große Vorteil des H + -Modells liegt in der Analogie zur sphärischen Geometrie S 2 . Viele Gesetze, die für H + gelten, haben eine große Ähnlichkeit zu
den entsprechenden Gesetzen in S 2 . Die folgende Tabelle zeigt die Ähnlichkeit
8
9
[On6] http://www.mathe-seiten.de/hypergeom.pdf
[On7] http://augat.zsg-rottenburg.de/zula.pdf
2
MODELLE DER HYPERBOLISCHEN GEOMETRIE
10
der beiden Modelle auf:
Ht+
S2
Form der Grundfläche
Einheitshyperbel x2 − y 2 = 1
Einheitskreis x2 + y 2 = 1
parametrisiert durch
(cosh(t), sinh(t)), t ∈ R
(cos(t), sin(t)), t ∈ R
quadratische Form
σ(x, y) := x0 y0 − x1 y1 − x2 y2
σ(x, y) :=
Punktmenge ⊂ R3
H + := {x ∈ R3 ; q(x) = 1, x0 > 0}
S 2 := {x ∈ R3 ; q(x) = 1}
Metrik
d(x, y) := arcosh(σ(x, y))
d(x, y) := arccos(σ(x, y))
P2
i=0
xi yi
y0
x0
für x = x1 , y = y1 ∈ H+ bzw. S 2 und q(x) := σ(x, x)
y2
x2
Ein Nachteil des H + -Modells besteht darin, dass sich die Geometrie auf dem
Hyperboloid zeichnerisch teils nur sehr schwer realisieren lässt, so beispielsweise bei Geradenspiegelungen. Das folgende Modell ist in dieser Hinsicht
weitaus besser geeignet.
2.2
Poincaré’sches Einheitskreisscheibenmodell E
Abbildung 6: Poincaré’sches Einheitskreisscheibenmodell E10
Abbildung 7: hyperbolische Geraden im Poincaré’schen Einheitskreisscheibenmodell E11
10
11
[On7] http://augat.zsg-rottenburg.de/zula.pdf
[On7] http://augat.zsg-rottenburg.de/zula.pdf
2
MODELLE DER HYPERBOLISCHEN GEOMETRIE
11
Um das Poincaré’sches Einheitskreisscheibenmodell E zu erhalten, bildet
man das H + -Modell auf eine Teilmenge des R2 ab, die offene Einheitskreisscheibe E:= {x = (x1 , x2 ) ∈ R2 ;|x| < 1}. E ergibt sich also durch
die Zentralprojektion von (−1, 0, 0) auf die (x1 , x2 )-Ebene. Die Abbildung 6
veranschaulicht dies.
Punkte, die im H + -Modell auf dem Hyperboloid ”weit außen” liegen, werden
im Poincaré’schen Einheitskreisscheibenmodell E also sehr nah an den Kreisrand projeziert. Die hyperbolischen Geraden in E sind entweder Kreisbögen
in E, die den Rand von E senkrecht schneiden, oder Durchmesser von E (siehe Abbildung 7). Die Durchmesser kann man hierbei einfach als Kreisbögen
unendlich großer Kreise sehen, die den Rand von E senkrecht schneiden.
Die hyperbolische Winkelmessung entspricht in diesem Fall der euklidischen,
d.h. der Winkel zwischen zwei Kreisbögen wird über deren Tangenten am
Schnittpunkt bestimmt.
Die hyperbolische Längenmessung erfolgt im Poincaré’schen Einheitskreisscheibenmodell E durch eine spezielle Distanzfunktion. Wir fassen die Ebene
E als komplexe Zahlenebene auf, wobei der hyperbolische Abstand zweier
Punkte A und B mit Hilfe des (komplexen) Doppelverhältnisses (a, b, p, q)
definiert wird:
(a−q)∗(b−p)
d(A, B) := ln( (b−q)∗(a−p)
)
Hierbei sind a, b, p, q die Koordinaten der Punkte A, B, P, Q. Die geometrische Interpretation des beschriebenen Doppelverhältnisses zeigt die Abbildung 8.
Abbildung 8: Längenmessung im Poincaré’schen Einheitskreisscheibenmodell E12
12
[On7] http://augat.zsg-rottenburg.de/zula.pdf
2
MODELLE DER HYPERBOLISCHEN GEOMETRIE
2.3
12
Beltrami-Klein Modell
Das Modell von Beltrami-Klein ist sehr einfach gehalten. Die hyperbolische
Ebene wird durch die offene Einheitskreisscheibe E := {x = (x1 , x2 ) ∈
R2 ;|x| < 1} (oder einen anderen Kegelschnitt) modelliert. Man erhält das
2 auf die x , x -Ebene. Die hyperModell durch vertikale Projektion von S+
1 2
bolischen Geraden entsprechen somit euklidischen Kreissehnen (siehe Abbildung 9).
Abbildung 9: Geraden im Beltrami-Klein Modell
Anhand des Modells von Beltrami-Klein kann man sich in Abbildung 9 sehr
schön die Parallelität zweier Geraden in der hyperbolischen Welt vor Augen
führen. Die Geraden e und g sind parallel, da sie sich weder im Inneren des
Modells noch auf dessen Rand treffen. Man nennt diese daher auch divergent oder ultraparallel. Die beiden Geraden e und f haben im Inneren der
Kreisscheibe keinen Punkt gemeinsam, treffen sich aber auf dem Rand des
Modells (im Unendlichen). Man bezeichnet e und f daher auch als asymptotisch parallel. Falls beide Geraden weder im Inneren des Modells noch
auf dessen Rand einen Punkt gemeinsam haben, so sind diese nicht parallel.
Dies trifft für die Geraden f und g zu.
Längen werden im Beltrami-Klein-Modell durch eine spezielle Distanzfunktion definiert. Da man (wie auch im Poincaré’schen Einheitskreisscheibenmodell) Strecken beliebiger Länge zeichnen möchte, man aber mit der offenen
Einheitskreisscheibe nur eine begrenzte Ebene zur Verfügung hat, muss auch
hier die Metrik entsprechend angepasst werden. Man definiert diese wieder
mit Hilfe des Doppelverhältnisses, d.h. der hyperbolische Abstand d(A, B)
zweier Punkte A und B im Inneren der Kreisscheibe wird definiert als:
d(A, B) :=
1
2
∗ ln( RA∗SB
)
RB∗SA
Hierbei sind R und S die Schnittpunkte der Geraden durch A und B mit
dem Kreisrand (siehe Abbildung 8).
3
ISOMETRIEN UND MÖBIUSTRANSFORMATIONEN
3
13
Isometrien und Möbiustransformationen
In diesem Kapitel wollen wir uns mit den Isometrien in der hyperbolischen
Ebene beschäftigen. Wir benutzen das Modell von Poincaré und untersuchen
zunächst, welche Isometrien möglich sind. Im weiteren Verlauf stossen wir
dabei auf eine bestimmte Art von Abbildungen, bei denen sich gewisse Spezialfälle als Isometrien herausstellen werden: die Möbiustransformationen.
3.1
Isometrien in der hyperbolischen Ebene
In der hyperbolischen Ebene gibt es (wie im Euklidischen) genau vier verschiedene Isometrien:
• Reflexion/Spiegelung
• Rotation/Drehung (Spezialfall: Grenzdrehung)
• Translation/Verschiebung
• Gleitspiegelung
Wir betrachten im Folgenden zunächst den Fall der Spiegelung, im Hyperbolischen auch ”Inversion am Kreis” genannt (siehe Abbildung 10). Gegeben
sei ein euklidischer Kreis K (mit Mittelpunkt S und euklidischem Radius
r), der die hyperbolische Ebene D schneidet. Die Schnittmenge ist dabei
die hyperbolische Gerade a. Man bestimmt nun einen Punkt P innerhalb
von D, der an a gespiegelt werden soll. Wir bezeichnen den zu erhaltenden
Bildpunkt mit Q. Dieser liegt auf der euklidischen Geraden durch P und S
innerhalb von D. Q wird dabei so gewählt, so dass e(P, S) ∗ e(Q, S) = r2 (*)
gilt.
Abbildung 10: Inversion am Kreis13
13
[Ros] Rosebrock, Stephan: Geometrische Gruppentheorie: Ein Einstieg mit dem Computer. Basiswissen für Studium und Mathematikunterricht. 1. Auflage. Vieweg+Teubner,
2004
3
ISOMETRIEN UND MÖBIUSTRANSFORMATIONEN
14
Falls a ein Durchmesser in D ist, dann handelt es sich um eine gewöhnliche
euklidische Spiegelung. Liegt P auf a, so ist e(P, S) = r. Daraus folgt mit
(*) sofort, dass e(Q, S) = r ist. Da Q auf der euklidischen Geraden durch P
und S liegt, gilt demnach P = Q. Die Spiegelgerade a bleibt also unter der
Spiegelung fix. Für den Fall, dass P auf dem Rand von D liegt, erhält man
als Spiegelpunkt Q ebenfalls wieder einen Randpunkt.
Eine Drehung um einen Punkt P (Schnittpunkt zweier Geraden) erhält man,
indem man jeden Punkt des zu drehenden Objekts an den beiden sich schneidenden Geraden nacheinander spiegelt. Man geht also wie im euklidischen
Fall vor, wobei der Drehwinkel der doppelte Winkel der beiden Spiegelachsen ist. Die Tatsache, dass Drehungen auf die gleiche Art und Weise wie im
Euklidischen funktionieren, liegt daran, dass der entsprechende Beweis das
fünfte Axiom nicht benutzt.
Ein Spezialfall der Drehung ist die sogenannte Grenzdrehung. Hierbei wird
an zwei asymptotischen Geraden hintereinander gespiegelt, d.h. man dreht
um einen Punkt im Unendlichen (siehe Abbildung 11).
Abbildung 11: Grenzdrehung14
Das Produkt zweier Spiegelungen entlang paralleler Geraden bezeichnet man
auch als Translation. Diese verläuft senkrecht zu den Spiegelachsen um das
Doppelte ihres Abstands (siehe Abbildung 12). Hierbei ist g senkrecht zu
a durch P und h senkrecht zum Mittelpunkt der Strecke von P nach Q.
Die hyperbolischen Geraden g und h sind parallel, da beide auf a senkrecht
stehen. τ = sh sg ist in diesem Fall eine Translation, wobei sx die Spiegelung
an der Geraden x ist (x ∈ {g, h}).
Eine Gleitspiegelung ist analog zum Euklidischen das Produkt einer Spiegelung und einer Translation.
14
[Ros] Rosebrock, Stephan: Geometrische Gruppentheorie: Ein Einstieg mit dem Computer. Basiswissen für Studium und Mathematikunterricht. 1. Auflage. Vieweg+Teubner,
2004
3
ISOMETRIEN UND MÖBIUSTRANSFORMATIONEN
15
Abbildung 12: Translation15
Es gibt also ebenfalls genau vier Isometrietypen im Hyperbolischen. Hierbei
stellt man fest, dass Geraden durch Isometrien wieder in Geraden übergehen
und Winkel durch Isometrien ihre Größe nicht ändern. Eine interessante
Folgerung dieser beiden Tatsachen ist der Satz über die Winkelsumme eines
hyperbolischen Dreiecks, welcher besagt, dass diese stets kleiner als 180◦ ist.
In Kapitel 4 werden wir diese zunächst verblüffend erscheinende Aussage
näher untersuchen.
Im Folgenden wollen wir jedoch zunächst noch eine spezielle Art von Abbildungen untersuchen, bei denen sich bestimmte Spezialfälle als Isometrien
des Poincaré’schen Einheitskreisscheibenmodells E herausstellen werden: die
Möbiustransformationen.
3.2
Isometrien von E, Möbiustransformationen
Bei der Betrachtung von Isometrien ist es oft zweckmässiger zur komplexen
Darstellung überzugehen. Wir identifizieren den R2 mit C und definieren die
offene Einheitskreisscheibe E wie folgt: E := {z ∈ C; |z| < 1}. Als Szenario
wählen wir die bereits in Kapitel 3.1 betrachtete Inversion am Kreis. Der
Punkt p wird am Kreis K gespiegelt und damit auf den Punkt p0 im Inneren des Kreises abgebildet (siehe Abbildung 13). Es gilt für die betrachtete
Abbildung φ: φ(p) = p0 und φ(p0 ) = p, d.h. offensichtlich ist φ2 = id.
Die Abbildung ist jedoch nicht für alle Punkte p definiert, sie hat Lücken:
φ(p) → ∞ für p → m. Wie können wir nun dafür sorgen, dass unsere Abbildung total ist? Wir erweitern unseren Definitionsbereich R2 bzw. C einfach
um den Punkt ”∞” und definieren R̂2 :=R2 ∪ {∞} bzw. Ĉ:=C ∪ {∞}. Für
einen Punkt p ∈ R̂2 lässt sich somit die folgende Abbildungsgleichung aufstellen:
15
[Ros] Rosebrock, Stephan: Geometrische Gruppentheorie: Ein Einstieg mit dem Computer. Basiswissen für Studium und Mathematikunterricht. 1. Auflage. Vieweg+Teubner,
2004
3
ISOMETRIEN UND MÖBIUSTRANSFORMATIONEN
φ(p) =
p0
=
m+
16
r2
|p−m|2
· (p − m), falls p 6= m, p 6= ∞
∞,
falls p = m
m,
falls p = ∞
Wir betrachten die obige Abbildungsgleichung nun für den Fall p 6= m und
p 6= ∞. In Ĉ gilt:
|p − m|2 = (p − m) ∗ (p − m) = (p − m) ∗ (p − m)
r2
⇒ φ(p) = p0 = m + p−m
mit p ∈ C, p 6= ∞, p 6= m
Bringt man alles auf einen Nenner und formt etwas um, so erhält man insgesamt:
φ(p) =
mp+(r2 −|m|2 )
p−m
Der Quotient hat also die Form
φ(p) =
mit p, a, b, c, d ∈ C ,wobei det
a b
c d
ap+b
cp+d
(**)
6= 0.
Eine Abbildung der Form (**) heißt auch Antimöbiustransformation, ihr
Pendant φ(p) = ap+b
cp+d heißt Möbiustransformation. Beide Begriffe fasst man
auch als allgemeine Möbiustransformation zusammen.
Abbildung 13: Inversion am Kreis16
Wie man leicht nachrechnen kann, ergibt die Komposition zweier Möbiustransformationen
bzw. zweier Antimöbiustransformationen wieder eine Möbiustransformation.
16
[On7] http://augat.zsg-rottenburg.de/zula.pdf
4
HYPERBOLISCHE SPIEGELUNGEN UND DREHUNGEN
17
So ist beispielsweise die in Abbildung 13 betrachtete Inversion am Kreis eine
Antimöbiustransformation, die zweimalige Hintereinanderausführung einer
solchen Kreisinversion, d.h. eine Drehung, ergibt jedoch eine Möbiustransformation.
Die allgemeinen Möbiustransformationen haben viele interessante Eigenschaften. Zwei Aspekte möchten wir an dieser Stelle noch kurz erwähnen:
• Die allgemeinen Möbiustransformationen bilden Geraden und Kreise
auf Geraden und Kreise ab.
• Die allgemeinen Möbiustransformationen bilden bzgl. der Komposition
eine Gruppe, die allgemeine Möbiusgruppe.
Auf die einfachen Beweise der beiden Aussagen wollen wir hier verzichten.
Sie seien dem geneigten Leser als Übungsaufgabe überlassen.
Wir haben in Kapitel 3.1 die vier hyperbolischen Isometrien kennengelernt,
insbesondere Spiegelungen und Drehungen. Im folgenden Kapitel wollen wir
diese beiden Isometrietypen aus algebraischer Sicht etwas näher betrachten.
Wir stossen dabei auf Spiegelungs- und Drehgruppen, mit deren Hilfe sich
-angewandt auf ein hyperbolisches Ausgangsdreieck- wunderschöne Pflasterungen der Ebene ergeben.
4
Hyperbolische Spiegelungen und Drehungen
Den Startpunkt für unsere folgenden Betrachtungen bildet das hyperbolische
Ausgangsdreieck in Abbildung 14.
Abbildung 14: Konstruktionsskizze des hyperbolischen Ausgangsdreiecks17
Die Seite BC des euklidischen Dreiecks ABC wird durch einen Kreisbogen
ersetzt, der durch B und C verläuft. Dieser soll im Inneren des euklidischen
Dreiecks ABC liegen. Aus der Konstruktionsskizze ist sofort ersichtlich, dass
die Winkelsumme des entstandenen hyperbolischen Dreiecks nun einen Wert
kleiner als 180◦ haben muss: α + β + γ < π.
17
[On8] http://www.claus-rohrbach.de/Symm-home.pdf
4
HYPERBOLISCHE SPIEGELUNGEN UND DREHUNGEN
4.1
18
Spiegelungsgruppen
Das hyperbolische Ausgangsdreieck ABC werden wir nun an seinen drei Seiten AB, BC und AC spiegeln.
Wir bezeichnen die Spiegelung an AC mit S1 , die Spiegelung an AB mit S2
und die Spiegelung an BC mit S3 . Die drei Spiegelungen bilden eine Gruppe, die man auch als Spiegelungsgruppe < S1 , S2 , S3 > bezeichnet. Hierbei
sind S1 , S2 und S3 das Erzeugendensystem der Spiegelungsgruppe.
Jede Spiegelung ist zu sich selbst invers, da die zweimalige Hintereinanderausführung einer Spiegelung die Identität ergibt:
Sx ◦ Sx = id für x ∈ {1, 2, 3}
Sehr lange Kompositionen von Spiegelungen des Dreiecks an seinen drei Seiten können aufgrund dieser Tatsache ”schrumpfen”, wie das folgende Beispiel illustrieren soll:
S1 ◦ S3 ◦ S3 ◦ S2 ◦ S2 ◦ S1 ◦ S3 ◦ S3 ◦ S1 = S1
Dennoch kann man sich leicht überlegen, dass die Spiegelungsgruppe unendlich viele Elemente enhalten muss. Dies soll die Abbildung 15 veranschaulichen.
Abbildung 15: Unendlichkeit der Spiegelungsgruppe18
In Zl und Zr befinden sich gleich viele Dreiecke, da Zl und Zr durch die Spiegelung an BC bijektiv aufeinander abgebildet werden. Durch eine Drehung
um den Ursprung kann jedes Dreieck aus Zr schließlich in ein enstprechendes
Bilddreieck in Zd überführt werden, wobei Zd ⊂ Zl ist. Da diese Abbildung
wiederum bijektiv ist, gilt also, dass |Zl | = |Zr | = |Zd |. Da aber Zd ⊂ Zl
gilt, muss |Zl | = ∞ sein.
18
[On8] http://www.claus-rohrbach.de/Symm-home.pdf
4
HYPERBOLISCHE SPIEGELUNGEN UND DREHUNGEN
4.2
19
Hyperbolische Parkettierungen
Wie bereits in Kapitel 3.1 festgestellt, entspricht die Hintereinanderausführung
zweier Spiegelungen S1 und S2 einer Drehung D2α (A) um den doppelten
Winkel α der beiden Spiegelachsen, wobei A das Drehzentrum ist.
Unter einer hyperbolischen Parkettierung versteht man nach [On8] nun die
”lückenlose, überlappungsfreie und regelmäßige Überdeckung der Ebene durch
hyperbolische Dreiecke (Parkettsteine)”. Wenn man sich das hyperbolische
Ausgangsdreieck betrachtet, so muss die Drehung D2α (A) mindestens k-mal
wiederholt werden, um wieder zum hyperbolischen Ausgangsdreieck zu gelangen. Wir fordern, dass dieses kleinste k ∈ N die Gleichung D2α (A)k =
(S1 ◦ S2 )k = id erfüllt. Es muss also gelten:
2αk = 2π
und das Drehzentrum A hat die Ordnung k.
Analog gehen wir für die beiden anderen Drehungen des hyperbolischen
Ausgangsdreiecks um die Drehzentren B und C vor und erhalten:
2βm = 2π
2γn = 2π
Da wir bei der Konstruktion des hyperbolischen Ausgangsdreiecks eingangs
gesehen haben, dass für die Winkelsumme α + β + γ < π gelten muss, kann
man direkt folgern:
α+β+γ =
π
k
+
1
n
< 1 (***)
π
m
+
π
n
<π
und damit schließlich
1
k
+
1
m
+
Den Ausdruck (***) nennt man auch Hyperbolizitätsbedingung. Zu der Spiegelungsgruppe < S1 , S2 , S3 > gehört jedes Zahlentripel (k, m, n) (k, m, n ∈
N), das der Hyperbolizitätsbedingung genügt.
Die unendliche Spiegelungsgruppe nennt man nach ihrem Entdecker Harold
S. M. Coxeter auch Coxeter-Gruppe und bezeichnet sie mit T ∗ (k, m, n).
Wendet man nun die Elemente S1 , S2 und S3 auf das hyperbolische Ausgangsdreieck unendlich oft an, so erhält man eine Parkettierung des Einheitskreises mit hyperbolischen Dreiecken. Bemerkenswert ist, dass es aufgrund der Hyperbolizitätsbedingung unendlich viele Möglichkeiten gibt, den
5
HYPERBOLISCHE ORNAMENTE
20
Einheitskreis mit hyperbolischen Dreiecken zu parkettieren. Im euklidischen
1
Fall gilt hingegen lediglich k1 + m
+ n1 = 1. Es gibt hier nur endlich viele Möglichkeiten, die Gleichung zu erfüllen. Dies sind die Tripel (3, 3, 3),
(2, 4, 4) und (2, 3, 6).
4.3
Drehgruppen
Wie wir bereits wissen, entspricht die Hintereinanderausführung zweier Spiegelungen S1 und S2 einer Drehung D2α (A) um den doppelten Winkel α
der beiden Spiegelachsen, wobei A das Drehzentrum ist. Daher bilden die
Abbildungen aus T ∗ (k, m, n) eine Untergruppe T (k, m, n), die man auch
als Drehgruppe bezeichnet. Die Untergruppe wird von den drei Drehungen
D(A), D(B) und D(C) erzeugt.
5
Hyperbolische Ornamente
In Kapitel 4.2 haben wir gesehen, dass man eine Parkettierung des Einheitskreises mit hyperbolischen Dreiecken erhält, wenn man die Elemente
S1 , S2 und S3 der Spiegelungsgruppe auf das hyperbolische Ausgangsdreieck unendlich oft anwendet. Das entstehende Muster bezeichnet man auch
als Ornament. Ein Ornament (lat.: ornare = ”zieren”, ”schmücken”) ist ein
meist sich wiederholendes, oft abstraktes oder abstrahiertes Muster.19
In diesem Kapitel betrachten wir ein interessantes hyperbolisches Ornament.
Dieses wurde mit dem Programm morenaments erstellt, das von Dipl.-Inf.
Martin von Gagern, Mitarbeiter am Zentrum für Mathematik, TU München,
im Rahmen seiner Dissertation entwickelt wird.
Wir wissen bereits, dass ein hyperbolisches Dreieck ABC die Hyperbolizitätsbedingung erfüllen muss, d.h. für seine Winkel α, β und γ muss gelten,
dass α + β + γ < 180◦ . Wir haben uns ebenfalls überlegt, dass es unendlich
viele Tripel (α,β,γ) gibt, die diese Bedingung erfüllen. Betrachten wir nun
ein spezielles Tripel, das dieser Bedingung genügt: das Tripel (7,3,2). Das
zugehörige Ornament ist in Abbildung 16 dargestellt.
Wir nehmen an, dass das hyperbolische Ausgangsdreieck türkis gefärbt ist
und die an das Dreieck angrenzenden Spiegelbilder schwarz gefärbt sind. Die
Gruppe T ∗ (7, 3, 2) bildet die Dreiecke überlappungsfrei, lückenlos und in abwechselnder türkis/schwarz-Färbung auf die hyperbolische Ebene ab. Auch
die Auswirkungen der Drehgruppe T (7, 3, 2) auf das hyperbolische Ausgangsdreieck lassen sich an diesem Ornament studieren. Das türkis gefärbte
Dreieck hat an seinen drei Ecken Drehzentren der Ordnung 2, 3 und 7. Das
bedeutet, dass durch eine 2-, 3- bzw. 7-malige Rotation des Dreiecks um die
19
[Mey] Meyer, Franz Sales: Handbuch der Ornamentik. Seemann, Leipzig 1927, Nachdr.
Seemann, Leipzig 1986
6
AUSBLICK
21
Abbildung 16: Hyperbolisches Ornament zur Gruppe T ∗ (7, 3, 2)20
jeweilige Ecke dieses in sich selbst überführt werden kann. Die Drehgruppe
erzeugt also die Vereinigung aller türkis gefärbten Dreiecke.
6
Ausblick
Die nichteuklidische Geometrie spielt mittlerweile eine wichtige Rolle in der
Kosmologie und theoretischen Physik. Da Schwerefelder den Raum ”krümmen”,
weicht die Geometrie des Weltalls von der euklidischen Geometrie ab. Eine
der großen aktuellen Fragestellungen der Physik betrifft die Geometrie des
Universums ”im Großen”. Ist diese sphärisch (elliptisch), eben (euklidisch)
oder hyperbolisch?
Die mögliche Geometrie und Form des Universums hängt gemäß den FriedmannGleichungen, die die Universumentwicklung im Standard-Urknallmodell beschreiben, grundlegend von der Massendichte bzw. Energiedichte im Universum ab:
• Ist die Dichte kleiner als ein bestimmter Wert (auch als kritische Dichte
bezeichnet), so wird die Geometrie als hyperbolisch bezeichnet.
• Ist die Massendichte gleich der kritischen Dichte, so ist die Geometrie
flach, d.h. euklidisch.
20
erstellt mit dem Programm morenaments, entwickelt von Dipl.-Inf. Martin von Gagern, TU München
6
AUSBLICK
22
• Ist die Massendichte größer als die kritische Dichte, so wird die Geometrie des Universums als sphärisch bezeichnet.
Interessant ist hierbei der dritte Fall. Anders als beim euklidischen und
hyperbolischen Fall würde sich ein Universum mit sphärischer Geometrie
irgendwann nicht mehr ausdehnen, und, im Gegensatz zum Stillstand beim
euklidischen Fall, wieder in sich ”zusammenstürzen”.21
21
[Haw] Hawking, Stephen: Das Universum in der Nussschale. Dtv München, 2003
LITERATUR
23
Literatur
[Haw]
Hawking, Stephen: Das Universum in der Nussschale. Dtv
München, 2003
[Hen]
Hentschel, Klaus: Vorlesung über die nicht-euklidische Geometrie. Universität Stuttgart, 2010
[Mey]
Meyer, Franz Sales: Handbuch der Ornamentik. Seemann,
Leipzig 1927, Nachdr. Seemann, Leipzig 1986
[Ros]
Rosebrock, Stephan: Geometrische Gruppentheorie: Ein Einstieg mit dem Computer. Basiswissen für Studium und Mathematikunterricht. 1. Auflage. Vieweg+Teubner, 2004
[Scr]
Scriba, Christoph J., Schreiber, Peter: 5000 Jahre Geometrie: Geschichte, Kulturen, Menschen (Vom Zählstein zum Computer). 2. Auflage. Springer, 2005
[On1]
http://did.mat.uni-bayreuth.de/mmlu/pythagoras/lu/elemente.html
letzter Zugriff am 17.07.2010
[On2]
http://www.im-blog.com/biographien/euklid-von-alexandria/
letzter Zugriff am 17.07.2010
[On3]
http://eom.springer.de/f/f040110.htm
letzter Zugriff am 17.07.2010
[On4]
http://kortenkamps.net/papers/2000/Euklidisch-NichtEuklidisch.pdf
letzter Zugriff am 17.07.2010
[On5]
http://www.hopfenwiesen.de/download/sphaerGeometriePraesentation.pdf
letzter Zugriff am 17.07.2010
[On6]
http://www.mathe-seiten.de/hypergeom.pdf
letzter Zugriff am 17.07.2010
[On7]
http://augat.zsg-rottenburg.de/zula.pdf
letzter Zugriff am 17.07.2010
[On8]
http://www.claus-rohrbach.de/Symm-home.pdf
letzter Zugriff am 17.07.2010