Numerische Umsetzung der Galbrun-Gleichung zur
Werbung

Fakultät Maschinenwesen, Institut für Festkörpermechanik
Numerische Umsetzung der Galbrun-Gleichung zur
Modalanalyse strömender Medien in
Außenraumproblemen unter Einsatz finiter und
infiniter Elemente
Dissertation
Stefanie Retka
Tag der Einreichung:
Tag der Verteidigung:
23.03.2012
15.06.2012
Gutachter:
Prof. Dr.-Ing. habil. Prof. h. c. Hans-Jürgen Hardtke
Prof. Dr.-Ing. Steffen Marburg
Vorsitzender der Promotionskommission:
Prof. Dr.-Ing. habil. Jochen Fröhlich
Numerische Umsetzung der Galbrun-Gleichung zur
Modalanalyse strömender Medien in
Außenraumproblemen unter Einsatz finiter und
infiniter Elemente
Von der Fakultät Maschinenwesen
der
Technischen Universität Dresden
zur
Erlangung des akademischen Grades
Doktoringenieur (Dr.-Ing.)
angenommene Dissertation
. . Dipl.-Ing.
. . . . . . . . . . . . . . . . . . . . . . . Retka
. . . . . . . . . . . . . . . . . . . . .Stefanie
.......
akad. Grad
Name,
Vorname
geb. am: . . .12.02.1983
..............
in: . . Zwickau
.............
Tag der Einreichung:
Tag der Verteidigung:
23.03.2012
15.06.2012
Gutachter:
Prof.
. . . . .Dr.-Ing.
. . . . . . . habil.
. . . . . .Prof.
. . . . h.
. . .c.. .Hans-J
. . . . . .ürgen
. . . . . Hardtke
.......
Prof.
Dr.-Ing.
Steffen
Marburg
.............................................
Vorsitzender der Promotionskommission:
Prof.
. . . . .Dr.-Ing.
. . . . . . . habil.
. . . . . .Jochen
. . . . . . Fr
. . öhlich
...................
Inhaltsverzeichnis
Nomenklatur
iii
Vorwort
2
1 Einleitung
1.1 Problemstellung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Stand der Technik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Zielsetzung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
3
4
6
2 Akustische Grundlagen
2.1 Galbrun-Gleichung . . . . . . . . . . . . . . . . . . . . .
2.1.1 Oszillierende Verschiebung . . . . . . . . . . . .
2.1.2 Linearisierte Gleichungen der Hydrodynamik .
2.1.3 Starke Formulierung der Galbrun-Gleichung . .
2.1.4 Schwache Formulierung der Galbrun-Gleichung
2.1.5 Randbedingungen . . . . . . . . . . . . . . . . .
2.1.6 Berechnungsgebiet . . . . . . . . . . . . . . . . .
2.1.7 Diskretisierung . . . . . . . . . . . . . . . . . . .
2.2 Koordinatensysteme . . . . . . . . . . . . . . . . . . . .
2.3 Modalanalyse . . . . . . . . . . . . . . . . . . . . . . . .
2.4 Validierung . . . . . . . . . . . . . . . . . . . . . . . . .
2.4.1 Helmholtz-Gleichung . . . . . . . . . . . . . . .
2.4.2 Galbrun-Gleichung . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
9
9
10
12
17
18
22
24
26
32
33
35
35
38
.
.
.
.
43
43
43
45
45
4 Untersuchungen zur Intonation
4.1 Besonderheiten des Berechnungsmodells . . . . . . . . . . . . . . . . . . . . .
4.2 Modalanalyse des Blockflötenmodells ohne Strömung . . . . . . . . . . . . . .
4.3 Modalanalyse des Blockflötenmodells mit Strömung . . . . . . . . . . . . . . .
51
51
54
57
5 Zusammenfassung
61
Literaturverzeichnis
67
Abbildungsverzeichnis
77
Tabellenverzeichnis
79
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3 Anwendungen
3.1 Berechnung eines stationären Fluids . . . . . . . . . . . . . . .
3.1.1 Eigenwert-Such-Algorithmus . . . . . . . . . . . . . . .
3.2 Berechnung eines strömenden Fluids . . . . . . . . . . . . . . .
3.2.1 Konstante Strömung im gesamten Berechnungsgebiet .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
i
Nomenklatur
Abkürzungen
BEM
Randelementemethode (engl.: boundary element method )
CFD
Computational Fluid Dynamics
FE
FEM
FG
Finite Elemente
Finite Elemente Methode
Freiheitsgrad
Gl., Gln.
Gleichung, Gleichungen
IE
Infinite Elemente
konst.
konstant
LEE
linearisierte Euler-Gleichung (engl.: linearized Euler equation )
MIDI
Frequenztabelle einzelner Töne (engl.: musical instrument digital interface )
nel
nnod
nnodIE
Anzahl der Elemente
Anzahl der FE-Knoten
Anzahl der IE-Knoten
PML
perfekt angepasste Schicht (engl. perfectly matched layer )
RB
Randbedingung
TH
Taylor Hood
Operatoren
() · ()
∇
∆ = ∇·∇
(. . .)−1
(. . .)T
Skalarprodukt zweier Vektoren
Nabla-Operator
Laplace-Operator
invertierter Tensor
transponierter Tensor
iii
iv
Vektoren und Matrizen
Parameter und Variablen
a(x)
c0
f oc
f
g
g
i
k
p
p̄
r
rgp
resrel
s
s
t
wr
A
Ip
=
I
Lsp
Ma
Ni , N̄i
Pi
Pk
R
<
T
K
ε
λ
µ
ξi
ρ0
φ
ω
Γ , ΓC , ΓR
Ω
Radius des Bereichs der finiten Elemente
Schallgeschwindigkeit
Fokus
Frequenz
beliebige, skalare Funktion
geometrischer
Wichtungsfaktor für die Testfunktion der infiniten Elemente
√
= −1, komplexe Zahl
Wellenzahl
Druck
Testfunktion für den Druck
Radius, allgemein
Radius eines Gaußpunkts im infiniten Referenzelement
relativer Fehler
Entropiedichte
Shift
Zeit
2D Ansatzfunktion für den Druck
Volumendichte der Quellen aus der Volumengeschwindigkeit
Anzahl der Interpolationspunkte eines infiniten Elements
Imaginärteil, imaginäre Achse
Lagrange-Polynom der Ordnung (Ip − 1)
Machzahl
Ansatz- und Testfunktion für den Druck im Knoten i
reelle Interpolationsfunktion für den Druck im Knoten i
Lagrange-Polynom der Ordnung k
Radius des künstlichen Außenrands der infiniten Elemente
Realteil, reelle Achse
Element in einem diskretisierten Gebiet
Zusätze
dimensionsloser Parameter
= −iω, Parameter zur Lösung des Eigenwertproblems
Phasenfunktion
Wert des Drucks bzw. der Verschiebung im Knoten i
Dichte
skalare Funktion
Eigenkreisfrequenz
Gebietsrand allgemein, zwischen FE und IE bzw. fiktiv im Unendlichen
Berechnungsgebiet
Vektoren und Matrizen
0
f
g
Nullvektor
Kraftvektor
beliebiger Vektor
Vektoren und Matrizen
n
u
v
w
w̄
wr
x
A
B
D
I
M
Pi
K
W
W i , W̄ i
Φ
Ξ
Normalenvektor
Verschiebungsvektor
Geschwindigkeitsvektor
periodischer bzw. oszillierender Anteil der Verschiebung
Testfunktion der Verschiebung
2D Ansatzfunktion für die Verschiebung
Ortsvektor
Matrix A des Zustandsraums
Matrix B des Zustandsraums
Dämpfungsmatrix
Einheitsmatrix
Massenmatrix
reelle Interpolationsfunktion für die Verschiebung
Steifigkeitsmatrix
säkulare Komponente der Verschiebung
Ansatz- und Testfunktion für die Verschiebung im Knoten i
Vektor der Knotenwerte im Zustandsraum
Vektor der Knotenwerte
v
Vorwort
Der Hauptteil der vorliegende Arbeit entstand während meiner Tätigkeit am Institut für
Festkörpermechanik der Fakultät Maschinenwesen an der Technischen Universität Dresden.
Nach dem Wechsel an das Institut für Mechanik der Fakultät für Luft- und Raumfahrttechnik
an der Universität der Bundeswehr München habe ich die Arbeit dort vollendet.
Die Arbeit entstand im Rahmen eines DFG-Forschungsprojekts mit dem Titel Numeri”
sche Simulation des Klangspektrums und der Schallausbreitung in und um eine Blockflöte“.
Ohne die Unterstützung der deutschen Forschungsgesellschaft wäre diese Arbeit vermutlich nie entstanden. Doch auch zwei weitere Personen waren maßgeblich an der Realisierung dieses Forschungsthemas beteiligt. Zuerst möchte ich meinen Doktorvater Herrn Prof.
Dr.-Ing. habil. Prof. h. c. Hans-Jürgen Hardtke nennen. Er hat mich als weitere Mitarbeiterin am Institut für Festkörpermechanik aufgenommen und mir die Arbeit in einem sehr
warmen und herzlichen Kollegenkreis ermöglicht. An zweiter Stelle möchte ich Herrn Prof.
Dr.-Ing. Steffen Marburg anführen, der mich an die Technische Universität Dresden geholt
und mir später die Arbeit an der Universität der Bundeswehr München ermöglicht hat. Er
nahm sich stets viel Zeit für Diskussionen bei denen kostbare Ideen entstanden und gab mir
hilfreiche Anregungen mit auf den Weg. Zusätzlich stellte er wertvolle Kontakte zu anderen
Wissenschaftlern her und ermöglichte mir so viele fruchtbare Forschungsaufenthalte. Meine jährlichen Reisen nach Australien möchte ich hierbei besonders hervorheben. In Sydney
hatte ich mit Dr. Stuart Hawkins einen Mathematiker an meiner Seite, der sich viel Zeit für
Diskussionen über numerische Verfahren und deren Umsetzung nahm. Vor allem war dabei hilfreich, dass er als Mathematiker oft einen anderen Blickwinkel auf die akustischen
Themen als ein Ingenieur hatte. Einen weiteren guten Kontakt hatte ich in Dr. Luis HervellaNieto, einem spanischen Mathematiker. Mit seiner Hilfe konnte ich nicht nur meine Spanischkenntnisse verbessern, sondern auch gewinnbringende Gespräche führen. Besonders
danken möchte ich dem Vorsitzenden des Promotionsausschusses, Herrn Prof. Dr.-Ing. habil. Volker Ulbricht, für die wertvollen Hinweise im Zusammenhang mit der Fertigstellung
meiner Arbeit.
Ohne ein entsprechendes Umfeld kann jedoch keine gute Arbeit entstehen. Daher danke
ich all meinen Kollegen, die ein angenehmes Arbeitsklima schufen und mit denen ich mich
sowohl über fachliche als auch persönliche Dinge gut unterhalten konnte. Während meiner
Arbeit entstanden verschiedene Studienarbeiten, die teilweise interessante Ergebnisse beitrugen und für mein Projekt von Interesse waren.
Abschließend bedanke ich mich bei meiner Familie, die mir ein liebevolles zu Hause gab
und mich stets bei meinen Vorhaben unterstützte. Besonderer Dank gilt meinem Mann Johannes, der immer ein offenes Ohr für mich hatte.
Stefanie Retka
1
1 Einleitung
1.1 Problemstellung
Die Beschreibung der Schallausbreitung in ruhenden Fluiden erfolgt durch die skalare Wellengleichung. Dabei wird üblicherweise die Formulierung für den Schalldruck verwendet.
Bei akustischen Problemen wird häufig die Annahme getroffen, dass die Wellengleichung
eine harmonische Zeitabhängigkeit aufweist. Somit reduziert sie sich auf die harmonische
Wellengleichung, auch bekannt als die Helmholtz-Gleichung. Will man die Schallausbreitung in strömenden Medien untersuchen, wird die Formulierung deutlich komplizierter. Eine Möglichkeit stellt die Verwendung der Galbrun-Gleichung dar.
Werden Schallausbreitung und Schallabstrahlung in den Außenraum beschrieben, ist eine
geschlossen analytische Lösung lediglich für sehr einfache Modelle möglich. Für komplexere
Geometrien erfolgt die Lösung numerisch. Dies kann per Fourier-Entwicklung nach (orthogonalen) Eigenfunktionen, über numerische Verfahren mit lokalen oder globalen Ansätzen
(FEM, BEM) oder, seltener, über andere Verfahren erfolgen. Am gebräuchlichsten unter den
genannten Verfahren sind die numerischen Verfahren mit der Methode der finiten Elemente
(FEM) [42, 68, 76, 115] und der Randelementemethode (BEM) [39, 49, 80, 127]. Während die
FEM eine geeignete Formulierung benötigt, um die Abstrahlung ins Unendliche abzubilden
[67], leidet die BEM darunter, dass bei bestimmten Frequenzen aufgrund eines Rangabfalls
der Systemmatrix die Lösung des Gleichungssystems unmöglich wird [128]. In der Fachliteratur finden sich für die FEM vier Methoden, mit denen unter anderem Modalanalysen
im Außenraum durchgeführt werden können. Diese sind die absorbierenden Randbedingungen [64, 69, 79], die perfekt angepassten Schichten (PML) [24, 25, 26], die infiniten Elemente (IE) [7, 15, 32] und die Hardy-Space-Methode [71, 73, 74, 83]. Absorbierende Randbedingung und PML wurden in einzelnen kommerziellen FEM-Programmen wie ANSYS
und COMSOL implementiert. Aufgrund ihrer Einfachheit erweisen sie sich jedoch als nicht
sehr effizient, denn sie erfordern relativ große Berechnungsgebiete und feine Netze. Auch
für die BEM existieren verschiedene Verfahren zur Berechnung von Eigenwerten. Die Dual
Reciprocity Method ist für strukturdynamische Probleme einsetzbar und führt auf ein quadratisches Eigenwertproblem [116]. Jedoch scheint dieses Verfahren nur für den spezifischen
Fall der Abstrahlung in einen Halbraum akzeptable Ergebnisse zu liefern. Ein weiteres Verfahren stellt die Scaled Finite Boundary Element Method dar. Dieses in der Akustik noch
relativ neue Verfahren ermöglicht ebenfalls die Berechnung von Eigenwerten und Eigenvektoren [109, 111, 112]. In den Arbeiten von Steinbach und Unger [113, 114] werden mit einer
Galerkin-BEM die Eigenwerte für Probleme mit homogenen Dirichlet-Randbedingungen ermittelt. Die Eigenwerte werden dabei iterativ mit einem Newton-Verfahren berechnet. Ausschließlich in [114] wird ein Außenraumproblem diskutiert. Dabei werden jedoch nur Eigenwerte und keine Eigenvektoren präsentiert. Hardtke und Marburg [70] beschreiben die
Anwendung der BEM zur Admittanzbestimmung bei geöffneten Gebieten.
Die Modalanalyse im Außenraum ist anspruchsvoll, da im Vergleich zur Vielfalt der Methoden zur Schallabstrahlungsberechnung nur sehr wenige Verfahren existieren, um das lineare oder das quadratische Eigenwertproblem aufzustellen.
3
4
Einleitung
In der vorliegenden Arbeit wird sich lediglich auf die finite Elemente Methode für die Modalanalyse von Außenraumproblemen beschränkt. Das Nahfeld des betrachteten Körpers
wird mit finiten Elementen vernetzt und in ausreichender Entfernung vom abstrahlenden
Körper erfolgt im Allgemeinen die Anbindung einer der vier zuvor genannten Varianten.
Sowohl das Buch von Kollmann [85] als auch die Artikel von Thompson [115] und Givoli
[65] bieten hierzu eine gute Übersicht. In der vorliegenden Arbeit werden infinite Elemente
verwendet, um die Abstrahlung in den Außenraum zu beschreiben.
Für die Simulation der Schallabstrahlung in Strömungen existieren bereits verschiedene
Formulierungen. Diese betreffen in erster Linie rotationsfreie Strömungen [11, 51, 62]. Werden rotationsbehaftete Strömungen betrachtet, wird die Galbrun-Gleichung genutzt. Peyret
und Élias [99] sowie Treyssède und Ben Tahar [117, 118] haben diese Gleichung für die finite
Elemente Methode formuliert.
Im Rahmen dieser Arbeit interessiert die Schallausbreitung in allgemeinen, rotationsbehafteten Strömungen, um die strömungsakustischen Vorgänge in technischen Systemen zu
beschreiben. Dies ist in verschiedenen industriellen Anwendungen von Bedeutung. Häufig
steht dabei eine Schallreduktion zur Minderung der Geräuschemission im Vordergrund.
In der musikalischen Akustik besteht die Hauptaufgabe in der Frequenzabstimmung und
Klangverfeinerung. In der vorliegenden Arbeit wird eine Blockflöte als Beispiel für ein komplexes akustisches System gewählt. Bei der Blockflöte dient die Überströmung einer scharfen Kante, dem Labium, als tonbildender Mechanismus. Dabei bestimmen die Resonatoreigenschaften des Instruments die Frequenz, mit der das Wirbelfeld angeregt wird. Der
Resonanzkörper ist hier der Hohlraum des Instrumentenkorpus. Bei dieser Interaktion erfolgt die Anregung eines Wirbelfeldes mit einem periodischen Energietransfer zwischen dem
Druck- und dem Geschwindigkeitsfeld. In dem Wirbelbereich werden Druckschwankungen (Schall) einerseits erzeugt und andererseits dissipiert [19, 86]. Vergleichbare Mechanismen finden sich beispielsweise an Klappen von Tragflügelkonfigurationen oder um Lochbleche bei Schalldämpfersystemen. Aufgrund der durch die Resonatoreigenschaften des Instruments festgelegten Resonanzfrequenz erzeugt diese Art der Schallentstehung vor allem
tonale Schallanteile. Diese tonalen Schallanteile hängen stark von der Geometrie und den
Anblasparametern ab [40]. Hier wird die dreidimensionale Schallausbreitung innerhalb und
um die Blockflöte bis hin zur Ausbreitung in einer beliebigen Raumgeometrie oder zur Abstrahlung in ein unendliches Feld untersucht.
Während man ein rein akustisches Strömungsproblem aus der industriellen Anwendung
deutlich nüchterner betrachten wird und daher zu größeren Vereinfachungen neigt, ist dies
bei der Forschung an einem Blasinstrument nicht möglich. Es sei jedoch noch einmal darauf verwiesen, dass sich die in dieser Arbeit entwickelten und verwendeten Verfahren nicht
nur für die Simulation von Holzblasinstrumenten eignen. Zusätzlich sind Anwendungen bei
beliebigen Ventilöffnungen, umströmten Kanten, z. B. Landeklappen, sowie Rohrsystemen,
z. B. Schlaf-Apnoe-Masken und Abgasanlagen bei Verbrennungsmotoren, und bei allgemein
offenen Resonanzkörpern denkbar. Diese findet man zum Beispiel bei weiteren Musikinstrumenten (Orgelpfeifen, Gitarre), bei offenen Hohlräumen (Radhaus am PKW, Innenraum mit
offenem Fenster) und anderen, technisch häufig analysierten Strukturen.
1.2 Stand der Technik
Es gibt nur wenig Literatur im Bereich der Grundlagenforschung zum Musikinstrumentenbau. Für Blasinstrumente findet man allerdings häufig analoge Forschungsbereiche für in-
1.2 Stand der Technik
5
dustrielle Anwendungen. Die Mechanismen der Tonerzeugung und der Schallausbreitung,
wie sie bei Blasinstrumenten existieren, findet man überall dort wieder, wo Ventile in der
Pneumatik unerwünschte Töne erzeugen oder wo Abgasanlagen bestimmte Abstrahlungsanforderungen erfüllen müssen. Scharfe Kanten, an denen Wirbelschichten periodisch abscheren, wie man sie auch an Klappen von Tragflügelkonfigurationen findet, führen beispielsweise in der Blockflöte am Labium zu periodischen Schwingungen, d. h. zu Tönen.
Am Tragflügel hingegen entstehen aperiodische, breitbandige Geräusche, die in der nahen
Umgebung eines landenden Flugzeugs als unangenehm wahrgenommen werden.
Das Spektrum eines akustischen Außenraumproblems ist kontinuierlich. Jedoch gibt es abgesehen von dem kontinuierlichen Spektrum auch so genannte gefangene Moden (trapped
modes ). Dabei handelt es sich um zusätzliche diskrete Eigenwerte in der komplexen Ebene
[78, 120, 121]. Diese gefangenen Moden können auch im Außenraum Resonanzphänomenen
entsprechen [89, 91]. Aktuell gibt es einige theoretische Arbeiten zu Eigenwerten, Eigenvektoren und Resonanzen offener Systeme von Koch u. a. [71, 72, 84].
Es existieren eine Reihe von wissenschaftlichen Arbeiten, die sich sowohl numerisch als
auch experimentell mit Fragen der Klangentwicklung und Klangaufbereitung in Flöten und
flötenähnlichen Instrumenten beschäftigen. Bereits 1960 veröffentlichte Benade [23] Untersuchungen zum Einfluss von Tonlöchern bei Blockflöten. Dabei lag das Hauptaugenmerk
auf der Interaktion zwischen Bohrung und Tonloch. Er ging von der Annahme aus, dass
Tonlöcher, die an ihrem äußeren Ende geschlossen sind, hinreichend exakt durch die Approximation mittels verzweigter linearer Röhren analytisch abschätzbar sind. Weiterhin erkannte er, dass jede Fourier-Mode an jedem Tonloch mit einer eigenen Strahlungseffizienz und
Richtungscharakteristik abstrahlt. Barjau u. a. [21] entwickelten einen CTIM-Algorithmus
(engl.: continuous-time interpolated multiconvolution ), der die exakte Simulation der Antwort einer akustischen Welle mit beliebig plazierten Diskontinuitäten im Zeitbereich erlaubt.
Voraussetzung hierfür sind ein lineares akustisches Verhalten und geringe viskothermische
Verluste. Zusätzlich wurde der CTIM-Algorithmus durch einen Vergleich mit numerischen
Simulationen im Zeitbereich an verschiedenen diskreten Stellen zu unterschiedlichen Zeitpunkten verifiziert. In diesem Zusammenhang ist die Arbeit von Dubos u. a. [48] ebenfalls
zu erwähnen. Nederveen u. a. [98] untersuchten die Strömungsaufteilung am Tonloch eines Holzblasinstruments. Bei den in dieser Arbeit beschriebenen analytischen Berechnungen
tritt allerdings ein systematischer Fehler auf, der lediglich mittels dreidimensionaler Vergleichsrechnungen abgeschätzt werden kann. Wolfe ist mit diversen Koautoren sehr aktiv
im Bereich der experimentellen Untersuchungen an Holzblasinstrumenten [52, 53, 125, 126].
Weitere experimentelle Untersuchungen können in den Arbeiten [2] und [29] gefunden werden. Einen Vergleich zwischen numerischen und experimentellen Daten für den Druck einer
Flöte präsentieren d’Andréa-Novel u. a. [3].
Beispiele für die Musikinstrumentenforschung im deutschsprachigen Raum findet man z.
B. bei Wogram und Meyer, die Versuche zur Druckabhängigkeit der Intonation durchführten
[123] und den Einfluss des Spielers untersuchten [124]. An der RWTH Aachen analysierte
Kob Eigenschwingformen und Wandvibrationen von Orgelpfeifen [81, 82] und an der Technischen Universität Dresden wurden von Möbius experimentelle und numerische Modalanalysen an einer Blockflöte und deren Fluid durchgeführt, um den Einfluss der Struktur auf
das akustische Verhalten zu untersuchen [96]. Die experimentelle Modalanalyse des Fluids
und die damit verbundenen Messungen der Eingangsimpedanzen erfolgten nach dem von
Backus [17, 18] bereits bei verschiedenen Instrumenten verwendeten Versuchsaufbau. Zur
Schwingungsanregung wurde ein Chirp-Signal genutzt. Das Signal durchlief Frequenzen in
einem Bereich von 50 Hz bis 3000 Hz. Bei der Modalanalyse wurde die stehende Luftsäule
6
Einleitung
analysiert, d. h. es war keine Strömung vorhanden. Die Gegenüberstellung der gemessenen
Resonanzfrequenzen mit den berechneten Eigenfrequenzen bzw. den Sollfrequenzen war auf
den Frequenzbereich von 340 Hz bis 1600 Hz beschränkt. Dieser schloss alle auf der untersuchten Blockflöte spielbaren Töne ein.
1.3 Zielsetzung
Ziel der vorliegenden Arbeit ist die Realisierung der Modalanalyse eines Fluids in einer
und um eine Blockflöte unter Berücksichtigung der turbulenten Strömung innerhalb und
im Nahfeld des Instruments. Dazu wurde die Schallerzeugung und die Wellenausbreitung
im Instrument von Richter [100, 101] mithilfe eines an die Problemstellung angepassten kompressiblen Navier-Stokes-Lösers simuliert. Dabei ließ sich der grundlegende Mechanismus
der Tonentstehung, d. h. die periodische Wirbelablösung am Labium, beschreiben. Es wurde ein Modell entwickelt, dass den Schallerzeugungsmechanismus abbildet und die gezielte
Untersuchung einzelner Aspekte, einschließlich instationärer, viskoser Effekte, ermöglicht.
Somit gelang es, quantitative Aussagen über den Einfluss der Geometrie auf die Klangbildung zu treffen. Dies ist vor allem bei kritischen Bereichen im Instrument, wie beispielsweise der Labiumkante, von entscheidender Bedeutung für den Instrumentenklang. Richter
beschäftigte sich bereits vor den Untersuchungen an einer Blockflöte intensiv mit numerischen Strömungsberechnungen an einem Fagott [103, 104].
Als Lösung der Navier-Stokes-Gleichung stehen Druck und Geschwindigkeit als Funktion
des Ortes und der Zeit. Auf diese Größen hat die Autorin Zugriff, die sie für die weiteren Berechnungen aufbereitet und auf ein gröberes FE-Netz für die akustische Analyse interpoliert.
Im Gegensatz zur Strömungsberechnung umfasst das Netz für die akustische Betrachtung
nicht nur den Bereich der Tonentstehung sondern den kompletten Fluidbereich des Resonators und des unendlichen Außenraums.
Beim Spielen einer Blockflöte wird die Luftsäule im Inneren des Instruments durch den
eingebrachten Luftstrom zum Schwingen angeregt. Der Spieler ist in der Lage die Tonfrequenz durch Variation des Anblasdrucks zu beeinflussen und damit eine Feinabstimmung
im Klang zu erreichen. Dieser Einfluss lässt sich nur durch die Berücksichtigung der Strömung in den akustischen Berechnungen untersuchen, woraus sich das Ziel dieser Arbeit
ableitet. Dabei ist zu beachten, dass die Töne aufgrund von selbsterregten Schwingungen
entstehen. Dies steht im Widerspruch zu der in dieser Arbeit durchgeführten Modalanalyse,
die eine lineare Schwingungsanalyse verkörpert. Es gibt jedoch verschiedene Gründe, die die
Verwendung der Modalanalyse rechtfertigen. Zum einen wird der periodische Vorgang nach
Abschluss des Einschwingvorgangs betrachtet. Das betrachtete Problem wird im Arbeitspunkt linearisiert und somit die mittlere Strömungsgeschwindigkeit verwendet. Weiterhin
liegt der Fokus der Untersuchungen auf der Intonation und demzufolge auf dem Grundton
nach dem Einschwingvorgang. Dabei handelt es sich um einen stationären Zustand.
Für die numerische Modalanalyse instationärer Fluide wird die gemischte Formulierung
der Galbrun-Gleichung verwendet. Die Galbrun-Gleichung ist eine lineare partielle Differentialgleichung. In der Literatur finden sich verschiedene Arbeiten, die sich mit der Lösung der
Galbrun-Gleichung mittels der finiten Elemente Methode befassen, vgl. z. B. [58, 59, 99, 117,
118]. Jedoch wird in keiner dieser Arbeiten explizit auf die Lösung des Eigenwertproblems
Bezug genommen. Außerdem konnte die Autorin lediglich Beispiele für ein- und zweidimensionale Probleme finden. In der vorliegenden Arbeit wird das beschriebene Verfahren
auf dreidimensionale Modelle angewandt.
1.3 Zielsetzung
7
In Kapitel 2 werden alle für die folgenden Berechnungen notwendigen Gleichungen aufgestellt. Das Hauptaugenmerk liegt dabei auf der Herleitung der Galbrun-Gleichung für die
Formulierung mit finiten und infiniten Elementen. Diese Gleichungen stellen die Grundlage
für die Entwicklung von Verfahren zur numerischen Berechnung der Eigenwerte und Eigenvektoren eines Fluids innerhalb und um offene Strukturen dar. Mit einer kommerziellen
Software wie ANSYS ist es nur möglich, lineare infinite Elemente für die Modalanalyse des
Fluids zu verwenden. Folglich müssen für die finiten Elemente ebenfalls lineare Ansätze
gewählt werden. Mit linearen Elementen ist eine Konvergenz der Ergebnisse aber nicht erreichbar [96, 97]. Aufgrund dieser Einschränkungen wird ein eigenes Programm erarbeitet.
Kapitel 3 zeigt verschiedene Anwendungen des auf Basis von Kapitel 2 entwickelten numerischen Programmcodes. Hierbei wird zunächst ein Algorithmus präsentiert, mit dem die
gezielte Berechnung einzelner Eigenwerte und Eigenfrequenzen möglich ist. Anschließend
folgen zwei Beispiele für die Verwendung der Galbrun-Gleichung. Kapitel 4 widmet sich
ausschließlich der Berechnung des Fluids innerhalb der und um die Blockflöte. In einem ersten Schritt wird die Modalanalyse ohne Strömung durchgeführt und im Anschluß um das
Strömungsfeld ergänzt. Die Arbeit schließt in Kapitel 5 mit einer Zusammenfassung und
einem Ausblick.
2 Akustische Grundlagen
In diesem Kapitel werden die für die Berechnungen in den folgenden Kapiteln erforderlichen
Grundlagen erläutert. Die Gleichungen, die Voraussetzung für die numerische Umsetzung
sind, werden in Abschnitt 2.1 hergeleitet. Das Hauptaugenmerk liegt dabei auf der Entwicklung der Galbrun-Gleichung aus der Massenbilanz, der Impulsbilanz und einer konstitutiven Beziehung. Dabei wird an geeigneten Stellen der Bezug zur Helmholtz-Gleichung hergestellt. Eine kurze Erläuterung der verwendeten Koordinatensysteme erfolgt in Abschnitt 2.2,
bevor in Abschnitt 2.3 die Besonderheiten der durchgeführten Modalanalyse beschrieben
werden. Das Kapitel schließt mit einer Validierung des auf Basis der hergeleiteten Gleichungen entwickelten Codes.
2.1 Galbrun-Gleichung
In diesem Abschnitt werden zwei verschiedene Schreibweisen verwendet; einerseits die Einsteinsche Summenkonvention, im Folgenden auch Tensornotation genannt, und andererseits
die symbolische Schreibweise. Die Verwendung der Einsteinschen Summenkonvention ist
notwendig, um die Herleitungen eineindeutig zu beschreiben. Einzelne Zwischenergebnisse sowie die in den folgenden Abschnitten und Kapiteln verwendeten Gleichungen werden
zusätzlich in symbolischer Schreibweise dargestellt, da diese einen besseren Zugang zur verwendeten Galbrun-Gleichung sowie zu den infiniten Elementen (IE) ermöglicht.
Werden in der Akustik praxisrelevante Beispiele beschrieben, ist es bei Berechnungen im
Frequenzbereich häufig notwendig, Strömungen zu berücksichtigen. Dazu wird üblicherweise auf die linearisierten Euler-Gleichungen (LEE) zurückgegriffen. Im Gegensatz zur
Helmholtz-Gleichung ist man mit den LEE in der Lage, die Schallausbreitung in einer verschiebungsbasierten Formulierung zu beschreiben und damit eine Strömung zu berücksichtigen.
In allgemeinen und somit realitätsnahen Modellen ist zusätzlich zum Umgebungsdruck
auch eine Strömung vorhanden. Dies führt zu sehr komplexen Gleichungssystemen, die nur
schwer zu lösen sind, Gabard u. a. [60]. Aufgrund numerischer Schwierigkeiten sind die
Berechnungen meist auf stark vereinfachte Strukturen beschränkt, vgl. Treyssède u. a. [117].
Galbrun [61] formulierte 1931 die LEE bezüglich einer Euler-Lagrange-Betrachtungsweise
um. Die resultierende Gleichung ist verschiebungsbasiert und als Galbrun-Gleichung bekannt. Bei dieser Gleichung handelt es sich um eine lineare partielle Differentialgleichung
zweiter Ordnung [99]. In Arbeiten von Treyssède u. a. [117, 118] werden die Galbrun-Gleichung und die LEE miteinander verglichen und einige Vorteile der Erstgenannten aufgezeigt. Unter anderem ist die Differentialgleichung weniger kompliziert, da nur die akustische Verschiebung in die Berechnung eingeht. Weiterhin können die Randbedingungen über
einfache Ausdrücke eingebunden werden. Die Galbrun-Gleichung ist daher eine vielversprechende Alternative zu den linearisierten Euler-Gleichungen.
Diese Arbeit beschreibt die Herleitung analog zu Godin [66]. Ähnliche Herleitungen findet
man auch in [44, 119].
9
10
Akustische Grundlagen
2.1.1 Oszillierende Verschiebung
In der gemischten Euler-Lagrange-Betrachtungsweise wird ein Fluidpartikel betrachtet, welches sich zum Startzeitpunkt t = 0 an der Stelle x0 befindet. Zum Zeitpunkt t > t0 hat es die
Position x(t). Mithilfe dieser Information wird die Verschiebung des Partikels durch
u(x, t) = x(t) − x0
(2.1)
beschrieben. Diese Formulierung der Verschiebung entspricht einer Lagrange-Beschreibung
in Euler-Koordinaten. Während sich bei der Lagrangeschen Betrachtungsweise das Koordinatensystem mit dem betrachteten Körper mitbewegt, ist das Koordinatensystem bei der
Eulerschen Betrachtungsweise ortsfest.
Wird die materielle Zeitableitung
d()
∂()
=
+ v · ∇()
dt
∂t
(2.2)
auf die Verschiebung angewendet, folgt die Geschwindigkeit mit
v(x, t) =
du(x, t)
∂u(x, t)
=
+ v(x, t) · ∇u(x, t)
dt
∂t
(2.3)
in Abhängigkeit vom Ort und der Zeit. Für das weitere Vorgehen wird die Annahme getroffen, dass die Fluidbewegung durch die Überlagerung eines zeitunabhängigen Umgebungsdrucks mit einer Welle kleiner Amplitude verursacht wird. Die Wellenamplitude ist
proportional zu dem dimensionslosen Parameter ε, für den 0 < ε 1 gilt. Die Partikelverschiebung und die Partikelgeschwindigkeit werden auf mehreren Skalen entwickelt, die
über ε angezeigt sind
u(x, t) =u0 (x, t) + u1 (x, t) + O(ε2 ) ,
v(x, t) =v 0 (x, t) + v 1 (x, t) + O(ε2 ) .
(2.4)
Während u1 und v 1 in der Größenordnung von ε sind, sind u0 und v 0 in der Größenordnung
von ε0 = 1 und hängen folglich nicht von der überlagerten Welle ab. Das Einsetzen von
Gl. (2.4) in Gl. (2.3) liefert unter der Annahme, dass weder die zeitliche noch die räumliche
Ableitung die Größenordnung der einzelnen Terme beeinflusst [119]
∂(u0 + u1 )
+ (v 0 + v 1 ) · ∇(u0 + u1 )
∂t
∂u0 ∂u1
=
+
+ v 0 · ∇u0 + v 0 · ∇u1 + v 1 · ∇u0 + v 1 · ∇u1 .
∂t
∂t
v0 + v1 =
(2.5)
Der Koeffizientenvergleich bezüglich der Potenz von ε mündet unter Berücksichtigung der
materiellen Zeitableitung (2.2) in
∂u0
du0
+ v 0 · ∇u0 =
,
∂t
dt
∂u1
du1
v1 =
+ v 0 · ∇u1 + v 1 · ∇u0 =
+ v 1 · ∇u0 .
∂t
dt
v0 =
(2.6)
(2.7)
Die Geschwindigkeit v 1 ist eine zeitharmonische Funktion. Im Fall eines ruhenden Fluids
ist u1 ebenfalls eine zeitharmonische Funktion. Ist jedoch eine inhomogene Umgebungsströmung vorhanden, muss sich die Verschiebung aus einer periodischen Komponente w und
2.1 Galbrun-Gleichung
11
einer säkularen Komponente W zusammensetzen. Folglich gilt u1 = w + W . Denn ist die
Geschwindigkeit v 1 periodisch, benötigt die Verschiebung u1 eine weitere Komponente, um
die Verschiebung der Umgebungsströmung u0 zu kompensieren. Gleichung (2.7) ist erfüllt,
wenn
dw
− w · ∇v 0
dt
W = − w · ∇u0
v1 =
und
(2.8)
(2.9)
gilt. Diese Bedingung lässt sich durch Gleichsetzen von Gl. (2.8) und Gl. (2.7), unter Berücksichtigung der Substitution u1 = w + W , den Gleichungen (2.6) und (2.9) sowie der
Anwendung der materielle Zeitableitung überprüfen.
Die Gleichungsnummern unter den geschweiften Klammern geben an, mithilfe welcher
Gleichung der jeweilige Umformungsschritt erreicht wurde.
Beweis: (2.8) = (2.7)
dw
du1
− w · ∇v 0 =
+ v 1 · ∇u0
dt
dt
d
dw
dw
− w · ∇v 0 = + (−w · ∇u0 ) +
dt | {z }
dt
dt
(2.9)
mit u1 = w + W
dw
− w · ∇v 0
dt
· ∇u0
dw d∇u0 dw ·
∇u
−
w
·
+ · ∇u0 − w · ∇v 0 · ∇u0
0
dt
dt
dt
∂∇u0
−w · ∇v 0 = − w ·
+ v 0 · ∇∇u0 −w · ∇v 0 · ∇u0
∂t
|
{z
}
(2.2)
du0
− v 0 · ∇u0 −w · ∆u0 ·v 0
−w · ∇v 0 = − w · ∇
|{z}
dt
|
{z
}
=0
(2.6)
−w · ∇v 0 = −
(2.10)
− w · ∇v 0 · ∇u0
(
(
(
(
(
(
((0 (
((0 (
w(
· ∇v
· ∇u
w(
· ∇v
· ∇u
−w · ∇v 0 = − w · ∇ v 0 +(
0
0 −(
|{z}
(2.6)
q.e.d.
Godin [66] bezeichnet die periodische Komponente der Verschiebung w als oszillierende
Verschiebung, da ihr Mittelwert über eine Periode null ist. Diese Formulierung wird an dieser Stelle aufgegriffen. Bei einer gegebenen Umgebungsströmung ist deren Verschiebung u0
eine bekannte zeit- und ortsabhängige Funktion. Daher ist es möglich, die Verschiebung u1
an jeder Position explizit in ihre oszillierende und ihre säkulare Komponente zu zerlegen.
Der Vorteil liegt dabei in der Möglichkeit einer direkten Messung der oszillierenden Verschiebung. Im Fall eines ruhenden Mediums sind die Geschwindigkeit v 0 , die Verschiebung
u0 und folglich die säkulare Komponente der Verschiebung W null, womit u1 = w gilt.
Ist die oszillierende Verschiebung w(x, t) bekannt, erhält man aus Gl. (2.8) leicht die oszillierende Geschwindigkeit v 1 (x, t) .
12
Akustische Grundlagen
2.1.2 Linearisierte Gleichungen der Hydrodynamik
In diesem Abschnitt werden die Gleichungen hergeleitet, die zur Beschreibung der Wellenausbreitung in inhomogenen, strömenden und instationären Medien notwendig sind. Dazu
werden die Massenbilanz, die Impulsbilanz sowie eine konstitutive Beziehung aufgestellt.
Massenbilanz und Impulsbilanz
Die Funktionen für die Fluidgeschwindigkeit und den Fluiddruck hängen von den räumlichen Koordinaten und der Zeit ab. Sie werden durch die Impulsbilanz (2.11) und die Massenbilanz (2.12) beschrieben
∂v
(∇p + F )
+ (v · ∇)v = −
∂t
ρ
∂ρ
+ ∇(ρv) =ρA .
∂t
bzw.
(2.11)
(2.12)
Hierbei ist ρ die Massendichte, A die Volumendichte der Quellen aus der Volumengeschwindigkeit und F ist die Volumendichte der äußeren Kräfte.
Im Folgenden werden nur ideale Fluide betrachtet. Weiterhin werden die Volumendichte
der Volumengeschwindigkeit sowie die der äußeren Kräfte, welche auch die Gewichtskraft
einschließt, gleich null gesetzt. Das ist möglich, da sie für die hier zugrunde gelegten numerischen Berechnungen nicht relevant sind.
Druck und Geschwindigkeit werden mit diesen Vereinfachungen mit der Potenz von ε
entwickelt (p = p0 + p1 + . . . , v analog). Somit führen Gl. (2.11) und Gl. (2.12) auf
∇p0
dv 0
=−
,
dt
ρ0
∇p1 ρ1 ∇p0
dv 1
+ (v 1 · ∇)v 0 = −
+
dt
ρ0
ρ20
dρ0
+ ρ0 ∇ · v 0 =0 ,
dt
dρ1
+ ρ1 ∇ · v 0 + ∇ · (ρ0 v 1 ) =0 .
dt
(2.13)
und
(2.14)
(2.15)
(2.16)
Gln. (2.13) und (2.15) sind bis zur Größenordnung von ε0 entwickelt, Gln. (2.14) und (2.16)
bis ε. Gl. (2.14) zeigt die Impulsbilanz und Gl. (2.16) die Massenbilanz. Beide gelten für lineare Wellen in inhomogenen Umgebungsströmungen. Alle Größen des Mediums, die die
Umgebungsströmung beschreiben, sind gegebene Funktionen von Ort und Zeit.
Die Impulsbilanz und die Massenbilanz lassen sich auch in Abhängigkeit von der oszillierenden Verschiebung w formulieren. Hierzu sind einige numerische Umformungen notwendig, die im Folgenden unter Anwendung eines Notationswechsels zur Einsteinschen
Summenkonvention gezeigt werden. Die Indizes 0 und 1 der Geschwindigkeit werden aus
Gründen einer besseren Lesbarkeit oberhalb des Symbols v geschrieben. Ausgangspunkt
sind Gln. (2.8) und (2.15), welche in Tensornotation [30, 77] mit
1
vl =
d
0
wl − wq v l,q
dt
0
ρ̇0 = − ρ0 v l,l
und
(2.17)
(2.18)
2.1 Galbrun-Gleichung
13
anzugeben sind. Zunächst wird die linke Seite von Gl. (2.14) durch Substitution von Gl. (2.17)
umgeformt
dv 1
d d
d
0
0
0
+ (v 1 · ∇)v 0 =
wl − wq v l,q +
wn − wq v n,q v l,n
dt
dt dt
dt
dwq 0 d2
d0
dwn 0 0
0
wl − v l,q − wq v l,q + v l,n − wq v n,q v l,n
2
dt
dt
dt
dt
!
0
2
dv l
d
0 0
0
0 v
= 2 wl − wq
wq
v n,q
v l,n
−
v l,n
n,q − dt
dt
,q
!
0
d2
dv l
= 2 wl − wq
dt
dt
=
,q
d2 w
dv 0
= 2 −w·∇
.
(2.19)
dt
dt
Der Übergang von der zweiten zur dritten Zeile erfolgt durch Anwendung der materiellen
Zeitableitung (2.2) auf ∇ · v 0
!
0
dv l
d0
0
0
(2.20)
= v l,q + v l,n v n,q .
dt
dt
,q
Im zweiten Schritt wird Gl. (2.16) umgeformt. Dazu sind mehrere mathematische Rechenschritte notwendig, die im Folgenden aufgezeigt werden. Für die erste Beziehung werden
die Kettenregel und Gl. (2.15) berücksichtigt
·
ρ̇1 ρ1 ρ0 ∇v 0
ρ1
ρ̇1 ρ0 − ρ1 ρ̇0
=
+
=
ρ0
ρ0
ρ20
ρ20
·
ρ̇1
ρ1
ρ1 ∇v 0
,→
=
.
−
(2.21)
ρ0
ρ0
ρ0
Weitere Schritte bestehen aus der Umformung
ρ0,l ·
ρ0,l ·
ρ0,l
ρ̇0,l Z ρ0,l
ρ̇0,l Z ρ0,l
ρ0,l
wl
+ wl
+ wlZ − wl
− wlZ = ẇl
,
− wl
= ẇl
ρ0
ρ0
ρ0
ρ0
ρ̇Z
ρ0
ρ̇Z
ρ0
0
0
(2.22)
der materiellen Zeitableitung von ∇ · w
0
(ẇl ),l = (wl,l )· + wl,n v n,l ,
(2.23)
der Anwendung der Kettenregel auf
ρ̇0,l ρ0 − ρ0,l ρ̇0
ρ0,l ρ̇0
ρ0,l ·
(ρ0,l )·
− wl 2 ,
wl
= wl
= wl
2
ρ0
ρ0
ρ0
ρ0
(2.24)
sowie abschließend der materiellen Zeitableitung der Dichte
∂
dρ0
0
0
0
·
(ρ0,l ) = ρ0,l + ρ0,lm v m =
− ρ0,q v q
+ ρ0,lm v m
∂t
dt
,l
0
0
v q + ρ0,lm
=(ρ̇0 ),l − ρ0,q v q,l − ρ0,ql
0 v m,m ),l − ρ0,q v q,l
v m = (−ρ
| {z }
(2.18)
0
0
0
0
= − ρ0,l v m,m − ρ0 v m,ml − ρ0,q v q,l .
0
0
(2.25)
14
Akustische Grundlagen
Mit diesen Beziehungen lässt sich Gl. (2.16), beginnend mit der Division durch die Dichte ρ0 ,
umformen zu
1
0=
ρ0
dρ1
1
0
0
+ ρ1 ∇ · v 0 + ∇ · (ρ0 v 1 ) = (ρ̇1 + ρ1 v l,l + (ρ0 ẇl − ρ0 wq v l,q ),l )
dt
ρ0
|
{z
}
ρ0 ·(2.17)
·
0
0
0
ρ1 v l,l ρ1 v l,l (ρ0 ẇl − ρ0 wq v l,q ),l
=
−
+
+
ρ0
ρ0
ρ0
|
{z
}
(2.21)
·
ρ0,l
ρ1
0
0
+
(ẇl − wq v l,q ) + (ẇl − wq v l,q ),l
=
ρ0
ρ0
· ρ0,l ·
ρ0,l · ρ0,l 0
ρ1
0
0
=
−
wq v l,q + (wl,l )· + wl,n v n,l −(wq v l,q ),l
+ wl
− wl
ρ0
ρ0
ρ0
ρ0
|
{z
}
|
{z
}
(2.23)
(2.22)
ρ0,l ·
ρ0,l · ρ0,l 0
ρ1
0
0
0
=
+ wl,l + wl
− wl
wq v l,q + wl,n v n,l − wq,l v l,q − wq v l,ql
−
ρ0
ρ0
ρ0
ρ0
ρ0,l ·
ρ0,l ρ̇0 ρ0,l 0
(ρ0,l )·
ρ1
0
vn,l
=
wl,n
+ wl,l + wl
+ wl 2 −
wq v l,q + − wl
ρ0
ρ0
ρ0
ρ0
ρ0
|
{z
}
(2.24)
ρ1
ρ0
0
0
v l,q − wq v l,ql
−
wq,l
=
=
−
d
=
dt
d
=
dt
ρ0,l
ρ1
+ wl,l + wl
ρ0
ρ0
ρ0,l
ρ1
+ wl,l + wl
ρ0
ρ0
·
·
H
ρ0,l
0 H 0
Hw
v l,q − wqH
v l,ql
q
H
H
H
ρ0 HH
0
v n,n ρ0,l 0
wl
0
−
wq v l,q − wq v l,ql
− (ρ0,l )· − wl ρ0,l
ρ0
ρ0
ρ0
|{z}
(2.18)
ρ1 + wl ρ0,l
wl,l +
ρ0
+
HH
H 0
wl
wl
0 0
0 H
vH
(
ρ0,l
ρ0,q
) − ρ
vn,n
v
HH + m,m + ρ0 v m,ml
q,l
0,l
H
ρ0 |
ρ0
{z
} (2.25)
ρ1 + w · ∇ρ0
∇·w+
ρ0
.
(2.26)
Impulsbilanz und Massenbilanz ergeben sich somit in symbolischer Schreibweise als Funk-
2.1 Galbrun-Gleichung
15
tion von der oszillierenden Verschiebung zu
d2 w
dv 0
∇p1 ρ1 ∇p0
−w·∇
=−
+
2
dt
dt
ρ0
ρ20
d
ρ1 + w · ∇ρ0
∇·w+
=0 .
dt
ρ0
und
(2.27)
(2.28)
Konstitutive Beziehung
Besteht das Fluid aus mehreren Komponenten, ist der Druck eine Funktion von Massendichte ρ, Entropiedichte s und beliebig vielen Zusätzen K
p = Φ(ρ, s, K) mit p0 = Φ(ρ0 , s0 , K0 ) .
(2.29)
Alle Variablen werden mit der Potenz von ε entwickelt, wobei nur die Werte, die proportional zu 1 und ε sind, betrachtet werden. Für die Divergenz des Drucks folgt somit
∇p0 =
∂p0
∂p0
∂p0
|s0 ,K0 ∇ρ0 +
|p0 ,K0 ∇s0 +
|p ,s ∇K0 = c20 ∇ρ0 + α∇s0 + β∇K0
∂ρ0
∂s0
∂K0 0 0
(2.30)
und die Entwicklung von p in einer Taylorreihe unter Berücksichtigung obiger Bedingungen
liefert für
∂p0
∂p0
∂p0
|s0 ,K0 (ρ − ρ0 ) +
|p0 ,K0 (s − s0 ) +
|p ,s (K − K0 )
∂ρ0
∂s0
∂K0 0 0
=p0 + p1 = p0 + c20 ρ1 + αs1 + βK1 .
p =p0 +
(2.31)
Ein Koeffizientenvergleich in Bezug auf die Potenz von ε in Gl. (2.31) führt auf
p1 = c20 ρ1 + αs1 + βK1 .
(2.32)
In adiabaten Fluiden ist die Entropiedichte eines Fluidpartikels konstant. Daraus folgt, dass
zu allen Zeiten und Orten deren materielle Zeitableitung null sein muss und deswegen
ds0
=0 und
dt
ds1
+ v 1 · ∇s0 =0 .
dt
(2.33)
(2.34)
Die Anwendung von Gl. (2.8) auf Gl. (2.34) unter Berücksichtigung der materiellen Zeitableitung liefert
d
(s1 + w · ∇s0 ) = 0 .
dt
Die hierfür notwendigen Umformungsschritte zeigt der folgende Beweis.
(2.35)
16
Akustische Grundlagen
Beweis: (2.34) = (2.35)
ds
d
1 + v 1 ·∇s0 = (
s
1 + w · ∇s0 )
|{z}
dt
dt
(2.8)
dw dw d∇s0
·
∇s
−
w
·
∇v
·
∇s
=
· ∇s0 + w ·
0
0
0
dt
dt
dt }
| {z
(2.2)
∂∇s
0
−w · ∇v 0 · ∇s0 =w ·
+ v 0 · ∇ · ∇s0
| {z }
∂t
=0
∂s0
−w · ∇v 0 · ∇s0 =w · ∇
∂t
|{z}
(2.2)
ds
0
−w · ∇v 0 · ∇s0 =w · ∇
−v 0 · ∇s0
dt
|{z}
=0(2.33)
q.e.d.
(2.36)
Godin führt eine zusätzliche Annahme ein, die er als Annahme keiner Resonanz 1 bezeichnet.
Dabei wird angenommen, dass eine Feldvariable null ist, wenn deren zeitliche Ableitung
null ist. Diese Annahme wird für jegliche Linearkombination der Größen p1 , ρ1 , s1 , K1 , w
sowie deren zeitlicher und örtlicher Ableitungen getroffen [66]. Physikalisch bedeutet diese
Annahme, dass die Frequenz, die in einem Referenzgebiet gemessen wird, welches sich mit
der Geschwindigkeit der Umgebungsströmung bewegt, auf keiner Stromlinie gleich null ist.
Berücksichtigt man diese Annahme, wird Gl. (2.35) zu
s1 + w · ∇s0 = 0 .
(2.37)
K1 + w · ∇K0 = 0
(2.38)
Gleiches gilt für die Zusätze
und den Druck. Setzt man Gln. (2.37) und (2.38) in Gl. (2.32) ein und nutzt zusätzlich Gl.
(2.30), erhält man die lineare konstitutive Beziehung für Wellen in idealen strömenden Fluiden
p1 + w · ∇p0 =c20 ρ1 − αw · ∇s0 − βw · ∇K0 + c20 w · ∇ρ0 + αw · ∇s0 + βw · ∇K0
=c20 (ρ1 + w · ∇ρ0 ) .
(2.39)
In homogenen Medien sind der Umgebungsdruck p0 und die zugehörige Dichte ρ0 konstant,
wodurch sich die obige Gleichung zu
p1 = c20 ρ1
(2.40)
vereinfacht. Diese Gleichung ist auch als die akustische Druck-Dichte-Beziehung bekannt.
1
Godin führt den englischen Begriff no resonance assumption“ ein.
”
2.1 Galbrun-Gleichung
17
2.1.3 Starke Formulierung der Galbrun-Gleichung
Die Impulsbilanz (2.27), die Massenbilanz (2.28) und die konstitutive Beziehung (2.39) bilden
gemeinsam ein lösbares Differentialgleichungssystem für die Beschreibung linearer Wellen
unter der Bedingung, dass die Größen v 0 , p0 , c0 und ρ0 bekannt sind.
Es bleiben die drei unbekannten Variablen w, p1 und ρ1 . Die Annahme keiner Resonanz
wird auf die Massenbilanz (2.28) angewendet. Weiterhin wird Gl. (2.39) nach der Dichte ρ1
umgestellt und in Gl. (2.27) und Gl. (2.28) eingesetzt. Die Massenbilanz erhält nun die Form
0=∇·w+
ρ1 + w · ∇ρ0
1
1
1
=∇·w+
w· ρ0 + w· ρ0 .
(p1 + w · ∇p0 ) − ρ0
ρ
ρ
ρ0 c20
0
0
(2.41)
Für die Impulsbilanz wird erneut in die Tensornotation gewechselt und alle Terme werden
auf eine Seite gebracht
ρ1
0̇
− p0,l
0 =ρ0 ẅl + p1,l − ρ0 wn v l
ρ0
,n
p0,l
p0,l
p0,l
wq ρ0,q
=ρ0 ẅl + p1,l − ρ0 wn (−
),n −
(p1 + wq p0,q ) +
2
ρ0
ρ0
ρ0 c0
| {z }
(2.13)
p0,l
p0,l ρ0,n
=ρ0 ẅl + p1,l + wn p0,ln − wn p0,l
− 2 (p1 + wq p0,q ) +
w
q ρ0,q
ρ
0
ρ0 } ρ0 c0
{z
|
(2.43)
1
d2 w
(2.42)
=ρ0 2 + ∇p1 + (w · ∇)∇p0 −
∇p0 (p1 + w · ∇p0 )
dt
ρ0 c20
mit
ρ0 wn
p0,l
ρ0
= wn p0,ln + ρ0 wn p0,l ρ−1
0
,n
,n
= wn p0,ln − wn p0,l ρ−1
0 ρ0,n .
(2.43)
Somit erhält man das Gleichungssytem
ρ0
d2 w
1
∇p0 (p1 + w · ∇p0 ) =0 und
+ ∇p1 + (w · ∇)∇p0 −
2
dt
ρ0 c20
1
∇·w+
(p1 + w · ∇p0 ) =0 .
ρ0 c20
(2.44)
(2.45)
Weitergehend wird ein konstanter Umgebungsdruck angenommen. Dies vereinfacht das
obige Gleichungssytem zu
d2 w
+ ∇p1 =0 und
dt2
ρ0 c20 ∇ · w + p1 =0 ,
ρ0
(2.46)
(2.47)
welches später dazu verwendet wird, die schwache Formulierung in der gemischten Form
herzuleiten.
Eine Alternative ist die Zusammenfassung der Gln. (2.44) und (2.45) in einer Gleichung,
die nur noch von der oszillierenden Verschiebung abhängt [99]. Dazu stellt man die zweite
Gleichung nach dem Druck p1 um und substituiert p1 in der ersten Gleichung
ρ0
d2 w
+ (∇ · w + w · ∇)∇p0 − ∇(ρ0 c20 ∇ · w + w · ∇p0 ) = 0 .
dt2
(2.48)
18
Akustische Grundlagen
Das Vorgehen führt auf die vereinfachte starke Formulierung in der verschiebungsbasierten
Form
d2 w
ρ0 2 − ρ0 c20 ∇(∇ · w) = 0
(2.49)
dt
für einen Umgebungsdruck mit p0 = konst., ρ0 = konst. und c0 = konst. Gl. (2.49) ist
die Wellengleichung in verschiebungsbasierter Form. Analog dazu lautet die druckbasierte
Form
d 2 p1
ρ0 2 − ρ0 c20 ∆p1 = 0 .
(2.50)
dt
Im Fall eines ruhenden Fluids gilt v 0 = 0, womit sich die druckbasierte Wellengleichung in
ihrer bekannten Form ergibt
∂ 2 p1
− c20 ∆p1 = 0 .
(2.51)
∂t2
Damit ist die bekannte Lösung als Spezialfall in der allgemeinen Lösung enthalten.
2.1.4 Schwache Formulierung der Galbrun-Gleichung
Um die schwache Formulierung aufzustellen, wird für die oszillierende Verschiebung eine Zeitabhängigkeit der Form e−iωt angenommen. Es wurde eine negative Zeitabhängigkeit
gewählt, da die Wellen nach außen propagieren. Bei den hier dargestellten numerischen Ergebnissen ist kein Unterschied zwischen positiver und negativer Zeitabhängigkeit zu erkennen. Will man die Ergebnisse jedoch animieren, führt die negative Zeitabhängigkeit auf vom
Körper abstrahlende Wellen. Die materielle Zeitableitung (2.2) wird daher auch durch
d
dw
= −iωw + v 0 · ∇w bzw.
w = (−iω + v 0 · ∇)w
(2.52)
dt
dt
ausgedrückt. Um diese Beziehung in die starke Formulierung einzusetzen, wird sie zu
d2 w
= −ω 2 w − 2iωv 0 · ∇w + v 0 · ∇(v 0 · ∇)w ,
dt2
(2.53)
umgeformt. Nun wird Gl. (2.53) auf Gl. (2.46) angewendet. Dies führt auf die gemischte
druck- und verschiebungsbasierte Formulierung
−ρ0 ω 2 w − 2iωρ0 v 0 · ∇w + ρ0 v 0 · ∇(v 0 · ∇w) + ∇p1 =0 und
ρ0 c20 ∇ · w + p1 =0 .
(2.54)
(2.55)
Die schwache Formulierung wird analog zur starken Formulierung in einer rein verschiebungsbasierten Form dargestellt
0 = −ρ0 ω 2 w − 2iωρ0 v 0 · ∇w + ρ0 v 0 · ∇(v 0 · ∇w) − ρ0 c20 ∇(∇ · w) .
(2.56)
Betrachtet man den Fall eines ruhenden Fluids mit v 0 = 0, verschwinden die beiden mittleren Terme in Gl. (2.56) und übrig bleibt die verschiebungsbasierte Helmholtz-Gleichung
0 = −ρ0 ω 2 w − ρ0 c20 ∇(∇ · w) .
(2.57)
Gl. (2.57) lässt sich leicht in die druckbasierte Form umwandeln, wenn sie zunächst mit der
Divergenz multipliziert
0 = −ρ0 ω 2 ∇ · w − ρ0 c20 ∇ · ∇(∇ · w)
(2.58)
2.1 Galbrun-Gleichung
19
und anschließend die Beziehung zwischen Verschiebung und Druck [27]
∇·w =−
1
p1
ρ0 c20
(2.59)
eingesetzt wird. Die druckbasierte Helmholtz-Gleichung in der schwachen Formulierung
lautet
k 2 p1 + ∆p1 = 0 ,
(2.60)
mit der Wellenzahl k = cω0 und dem Laplace-Operator ∆ = ∇ · ∇.
In der verschiebungsbasierten Formulierung der Galbrun-Gleichung treten Schwierigkeiten bei der numerischen Umsetzung auf. Eine Konvergenz der Lösung ist bei Gebrauch der
gängigen finiten Elemente nicht garantiert [117]. Verwendet man Lagrange-Elemente tritt
eine große Anzahl an Scheinmoden auf, die die eindeutige Lösung des Eigenwertproblems
unmöglich machen. Auch Raviart-Thomas-Elemente, die rein verschiebungsbasiert sind, reichen für die Lösung in strömenden Medien nicht aus. Das liegt darin begründet, dass Raviart-Thomas-Elemente nur eine Verschiebungskomponente normal zur Elementseite, aber
keine in tangentialer Richtung, berücksichtigen. Somit lässt sich die Kontinuität in tangentialer Richtung nicht gewährleisten. Eine Lösung von Gl. (2.56) ist daher nur für den Sonderfall
eines ruhenden Fluids möglich. Da im Rahmen dieser Arbeit strömende Fluide untersucht
werden, ist die Verwendung der gemischten Formulierung mit Elementen, die die inf-supBedingung erfüllen, notwendig [20, 31, 37]. Treyssède, Gabard und Ben Tahar [60, 117, 118]
gehen davon aus, dass mithilfe der gemischten Formulierung die Scheinmoden vermieden
werden können.
Um die gemischte Formulierung zu diskretisieren, werden die Gln. (2.54) und (2.55) mit
den Testfunktionen w̄ bzw. p̄ multipliziert und anschließend über das gesamte Gebiet Ω mit
dem Rand Γ integriert.
Es wird erneut in die Tensornotation gewechselt, um die folgenden Berechnungen durchzuführen. Wendet man das Gauß-Theorem
Z
Z
Z
∇ · AdΩ = A · dΓ = A · ndΓ
(2.61)
Ω
Γ
Γ
auf das Produkt einer skalaren Funktion φ mit einem Vektorfeld g an, resultiert
Z
Z
(∇φ · g + φ∇ · g)dΩ = φg · ndΓ .
Ω
Γ
Unter Ausnutzung dieser Beziehung ergibt sich
Z
dwl 0
ρ0 w̄l
v q nq =
dt
Γ
Z
0
0
= ρ0 w̄l (−iωwl + v n wl,n )v q nq
Γ
Z
=
0
0
0
0
[ρ0 (w̄l (−iωwl + v n wl,n )),q v q + ρ0 w̄l (−iωwl + v n wl,n )v q,q ]
Ω
Z
=
0
0
0
0
0
[ρ0 w̄l,q (−iωwl + v n wl,n )v q + ρ0 w̄l (−iωwl,q + v n,q wl,n + v n wl,nq )v q
Ω
0
0
0
− iωρ0 w̄l wl v q,q + ρ0 w̄l v n wl,n v q,q ] .
(2.62)
20
Akustische Grundlagen
Diese wird umformuliert zu
Z
Γ
Z
dwl 0
0
0
0
ρ0 w̄l
v q nq + [iωρ0 w̄l wl v q,q − ρ0 w̄l v n wl,n v q,q ] =
dt
Ω
Z
0
0
0
0
0
0
0
0
= [−iωρ0 w̄l,q wl v q +ρ0 w̄l,q v n wl,n v q −iωρ0 w̄l wl,q v q +ρ0 w̄l v n wl,nq v q +ρ0 w̄l v n,q wl,n v q ] .
|
{z
}|
{z
}|
{z
}|
{z
}|
{z
}
Ω
1
2
3
4
5
(2.63)
Nun wird Gl. (2.54) mit w̄l multipliziert und über das Gebiet Ω integriert. Bei der Umformung wird die Beziehung (2.63) genutzt
Z
0
0
0
0 0
0
[−ρ0 ω 2 w̄l wl − 2iωρ0 w̄l v n wl,n + ρ0 w̄l v n (v q wl,q ),n + w̄l p1,l ]
0=
Ω
Z
0 0
[−ρ0 ω 2 w̄l wl − 2iωρ0 w̄l v n wl,n + ρ0 w̄l v n v q,n wl,q + ρ0 w̄l v n v q wl,qn + w̄l p1,l ]
=
Ω
Z
0
0
0 0
0 0
[−ρ0 ω 2 w̄l wl + w̄l p1,l − iωρ0 w̄l v n wl,n −iωρ0 w̄l v n wl,n +ρ0 w̄l v n v q,n wl,q +ρ0 w̄l v n v q wl,qn ]
|
{z
}|
{z
}|
{z
}
Ω
(2.63)3
(2.63)5
(2.63)4
Z
Z
0
0
0
0
0
0
+ (iωρ0 v q w̄l,q wl −iωρ0 v q w̄l,q wl ) + (ρ0 v n w̄l,q v q wl,n −ρ0 v n w̄l,q v q wl,n )
|
|
{z
}
{z
}
Ω
Ω
(2.63)1
(2.63)2
Z
0
0
0
0
= [−ρ0 ω 2 w̄l wl + w̄l p1,l − iωρ0 w̄l v n wl,n + iωρ0 v q w̄l,q wl − ρ0 v n w̄l,q v q wl,n ]
=
Ω
Z
ρ0 w̄l
+
Z
Γ
dwl 0
v q nq +
dt
Z
0
0
0
[iωρ0 w̄l wl v q,q − ρ0 w̄l v n wl,n v q,q ]
Ω
[−ρ0 ω w̄ · w + w̄ · ∇p1 + iωρ0 {−w̄ · (v 0 · ∇w) + (v 0 · ∇w̄) · w + w̄ · w · (∇ · v 0 )}
2
=
Ω
Z
− ρ0 w̄ · (∇ · v 0 ) · (∇w · v 0 ) − ρ0 (v 0 · ∇w̄) · (v 0 · ∇w)] +
dw
w̄ · ρ0 (v 0 · n)
dt
.
Γ
(2.64)
Analog wird Gl. (2.55) mit der Testfunktion für den Druck p̄ multipliziert und ebenfalls über
2.1 Galbrun-Gleichung
21
das Gebiet Ω integriert
Z 0=
Ω
Z =
Ω
Z =
Ω
Z =
Ω
1
p̄p1 + wl,l p̄
ρ0 c20
1
p̄p1 − wl p̄,l
ρ0 c20
1
p̄p1 − wl p̄,l
ρ0 c20
Z =
Ω
1
p̄p1 + (wl p̄),l − wl p̄,l
ρ0 c20
Z
+
(wl,l p̄ + wl p̄,l )
Ω
Z
+
p̄wl nl
Γ
1
p̄p1 − ∇p̄ · w +
ρ0 c20
Z
p̄(w · n) .
(2.65)
Γ
Die Umformung des zweiten Integrals von der zweiten zur dritten Zeile erfolgt unter Anwendung des Gauß-Theorems.
Bildet man die Differenz von Gl. (2.64) und Gl. (2.65) und ordnet die Gleichung um, erhält
man die gemischte Galbrun-Gleichung in der schwachen Formulierung
Z Ω
1
− 2 p̄p1 + ∇p̄ · w + w̄ · ∇p1 − ρ0 (v 0 · ∇w̄) · (v 0 · ∇w) − ρ0 w̄ · (∇ · v 0 ) · (∇w · v 0 )
ρ0 c0
ρ0 (v 0 · ∇w̄) · w + iω
ρ0 w̄ · (v 0 · ∇w) + iω
− iω
Ω
Ω
Z
− ω2
Z
Z
Z
ρ0 w̄ · w · (∇ · v 0 )
Ω
ρ0 w̄ · w
Ω
Z
=−
Γ
Z
dw
w̄ · ρ0 (v 0 · n)
+ p̄(w · n) , ∀p̄, w̄ .
dt
(2.66)
Γ
Alle Terme im Integral in der ersten Zeile entsprechen Steifigkeitskomponenten, jene in
der zweiten Zeile Dämpfungskomponenten und die in der dritten Massentermen. Über die
Randintegrale werden die Randbedingungen eingebracht.
An dieser Stelle wird als weitere Annahme eine divergenzfreie mittlere Fließgeschwindigkeit ∇ · v 0 = 0 vorausgesetzt. Somit entfallen zwei Terme aus der schwachen Formulierung
22
Akustische Grundlagen
der Galbrun-Gleichung und man erhält
Z
Z
Z
Z
1
−
p̄p
+
∇p̄
·
w
+
w̄
·
∇p
−
ρ0 (v 0 · ∇w̄) · (v 0 · ∇w)
1
1
ρ0 c20
Ω
Ω
Z
− iω
Ω
ρ0 w̄ · (v 0 · ∇w) + iω
Ω
ρ0 (v 0 · ∇w̄) · w
Ω
Z
− ω2
Ω
Z
ρ0 w̄ · w
Ω
Z
=−
Z
dw
+ p̄(w · n) ,
w̄ · ρ0 (v 0 · n)
dt
Γ
∀p̄, w̄ .
(2.67)
Γ
In dieser Arbeit werden lediglich divergenzfreie Fluide betrachtet.
Um die Helmholtz-Gleichung in ihrer schwachen Form darzustellen, ist ein analoges Vorgehen notwendig. Zunächst multipliziert man (2.60) mit einer Testfunktion p̄ und integriert
anschließend über das gesamte Berechnungsgebiet Ω
Z
Z
−∆p1 p̄ − k 2 p1 p̄ = 0 .
(2.68)
Ω
Ω
Die zweite Ableitung im ersten Integral wird eliminiert, indem die erste Greensche Identität
Z
Z
Z
∇p1 ∇p̄ −
−∆p1 p̄ =
Γ
Ω
Ω
∂p1
p̄
∂n
angewendet wird. Daraus folgt die schwache Formulierung der Helmholtz-Gleichung im
allgemeinen Fall
Z
Z
Z
∂p1
2
∇p1 · ∇p̄ − k p1 p̄ =
p̄ , ∀p̄ .
(2.69)
∂n
Ω
Ω
Γ
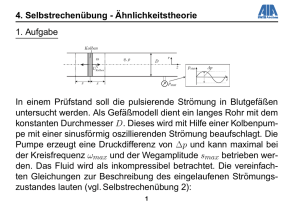
2.1.5 Randbedingungen
Die üblichen Randbedingungen in der Akustik sind Dirichlet-, Neumann- und Robin-Randbedingungen. Abbildung 2.1 zeigt ein allgemeines Berechnungsgebiet Ω mit einem aus i
Teilen zusammengesetzten Rand Γ.
Die Dirichlet-Randbedingung wird auch als wesentliche Randbedingung bezeichnet und
gibt den Druck des Mediums am Rand vor
p(x) = p0 (x) mit x ∈ Γ1 .
Die Neumann-Randbedingung ist auch bekannt als natürliche Randbedingung und wird
verwendet, wenn der Gradient des Drucks in Normalenrichtung gegeben ist
∂p(x)
= g(x) mit x ∈ Γ2 .
∂n
2.1 Galbrun-Gleichung
23
n
Γ1
Ω
Γ2
Γ3
Abbildung 2.1: Allgemeines Gebiet Ω mit Rändern Γi .
Die dritte Randbedingung, die Robin-Randbedingung, ist eine gemischte Randbedingung,
denn sie enthält sowohl den Gradienten des Drucks in Normalenrichtung als auch den
Druck selbst
∂p(x)
φ0 (x)
= φ1 (x)p + φ2 (x) mit x ∈ Γ3 ,
∂n
mit den beliebigen Funktionen φi .
Bei den in dieser Arbeit betrachteten Modellen ist lediglich die Normalenkomponente des
Drucks bzw. der Verschiebung auf dem Rand bekannt. Die direkten Größen von Druck und
Verschiebung sind jedoch unbekannte Größen.
Da im Folgenden für die betrachteten Ränder ausschließlich die Neumann-Randbedingung verwendet wird, ist eine Umformung derselben in die verschiebungsbasierte Form
erforderlich. Beachtet man hierbei den Zusammenhang zwischen dem Druckgradienten und
der Verschiebung
∂p
= n · ∇p = ρ0 ω 2 w · n ,
∂n
ergibt sich für die Neumann-Randbedingung in Abhängigkeit von der Verschiebung
w·n=
1
g(x) .
ρ0 ω 2
(2.70)
In unbegrenzten Gebieten wird eine weitere Randbedingung benötigt, die die Existenz
nur nach außen propagierender Wellen in großer Entfernung vom abstrahlenden Körper
garantiert [8]
∂p
r
− ikp → 0 mit r → ∞ .
(2.71)
∂r
Für die Herleitung von Gl. (2.71) wird auf Ihlenburg [76] verwiesen. Nimmt man an, dass
in großer Entfernung vom abstrahlenden Körper ein künstlicher Rand ΓR existiert, der eine
glatte, länglich ellipsoidförmige Fläche bildet, wird die Ableitung bezüglich des Radius r
[14, 32, 33]
∂
∂
=
.
(2.72)
∂r
∂n
Einsetzen von Gl. (2.72) in Gl. (2.71) und Umformen der Gleichung führt auf
∂p
= ikp .
∂n
(2.73)
Dies ist die Sommerfeld-Abstrahlbedingung, gültig für ellipsoidförmige, unendliche Gebiete.
24
Akustische Grundlagen
Bei den in dieser Arbeit untersuchten Modellen besitzt der Körper, durch bzw. um den das
Fluid fließt, immer feste Außenwände. In Möbius [96] werden die Eigenfrequenzen der Luft
im Resonanzköper mit denen des Festkörpers einer Blockflöte verglichen. Dabei wird der
Festkörper als eindimensionale Balkenstruktur betrachtet. Es wird gezeigt, dass lediglich
die Moden für Biegung und Torsion des Festkörpers im gleichen Frequenzbereich wie die
Eigenfrequenzen der Luft liegen. Diese beeinflussen die Resonatormoden jedoch nicht. Alle
weiteren Moden der Struktur liegen deutlich über denen der Luft und wirken somit nicht
auf diese ein. Da es sich bei dem in dieser Arbeit untersuchten Fluid ebenfalls um Luft handelt, welche einen Festkörper umströmt, wird der die Begrenzung des Berechnungsgebiets
darstellende Körper als schallhart angesehen. Infolgedessen muss die oszillierende Verschiebung normal zum Rand bzw. der Gradient des Drucks auf dem Rand null sein. Somit gilt für
den gesamten inneren Rand des Gebiets die Neumann-Randbedingung in der Form
w · n = 0 bzw.
∂p
=0.
∂n
(2.74)
2.1.6 Berechnungsgebiet
Abbildung 2.2 zeigt beispielhaft das gesamte untersuchte Berechnungsgebiet. Aufgrund der
Wahl der infiniten Elemente muss dieses kugel- bzw. ellipsoidförmig sein [32, 36]. Zum besseren Verständnis zeigt die Skizze nur ein zweidimensionales Gebiet.
n
ΓR
ΓC
Γ
O
n
B
ΩC
ΩR
a(x)
R
Abbildung 2.2: Komplettes Berechnungsgebiet mit Unterscheidung in einen inneren Bereich
ΩC und einen äußeren Bereich ΩR mit den zugehörigen Rändern.
Der längliche, grau dargestellte Körper B strahlt Wellen in das Berechnungsgebiet ab und
bildet gleichzeitig den Innenrand Γ des Gebiets. Bei ΩC handelt es sich um ein endliches
Gebiet mit dem Außenrand ΓC , das ellipsoidförmig möglichst nah um den abstrahlenden
Körper gebildet wird. Der das Gebiet begrenzende Radius wird mit a(x) bezeichnet. An
dieses begrenzte Gebiet schließt sich ein ebenfalls ellipsoidförmiges, unbegrenztes Gebiet
ΩR an. Dieses besitzt den virtuellen Außenrand ΓR mit dem Radius R.
Ein ellipsoidförmiger Gebietsrand ist am besten geeignet die in dieser Arbeit untersuchten
schmalen, langen Körper zu beschreiben. Der Ellipsoid lässt sich eng um einen derartigen
Körper legen und ermöglicht dadurch eine Minimierung des Berechnungsgebiets und somit
eine Reduzierung der Rechenzeit. Kompaktere Körper, die in einem kugelförmigen Gebiet
liegen, lassen sich ebenfalls berechnen, da die Kugel ein Spezialfall des Ellipsoids ist.
2.1 Galbrun-Gleichung
25
Begrenztes Gebiet
Wie bereits im Abschnitt 2.1.5 erläutert, entsprechen alle Ränder im Innenraum schallharten
Wänden, wodurch die Neumann-Randbedingung als Einzige zur Anwendung kommt. Die
schwache Formulierung der Galbrun-Gleichung im begrenzten Gebiet lautet demzufolge
Z
Z
Z
Z
1
0=−
p̄p1 +
∇p̄ · w +
w̄ · ∇p1 −
ρ0 (v 0 · ∇w̄) · (v 0 · ∇w)
ρ0 c20
ΩC
ΩC
Z
− iω
ΩC
ρ0 w̄ · (v 0 · ∇w) + iω
ΩC
ρ0 (v 0 · ∇w̄) · w
ΩC
Z
− ω2
ΩC
Z
ρ0 w̄ · w ,
∀p̄, w̄ .
(2.75)
ΩC
Analog dazu wird die Helmholtz-Gleichung im begrenzten Gebiet
Z
Z
2
∇p1 · ∇p̄ − k
p1 p̄ , ∀p̄
0=
ΩC
(2.76)
ΩC
verwendet. Für die direkte Herleitung der Helmholtz-Gleichung wird auf Marburg und Nolte [90] verwiesen. Die Formulierung lässt sich auch bei [4, 76] finden.
Unbegrenztes Gebiet
Wenn die Strömung im Nahfeld des abstrahlenden Körpers abklingt und daher null ist, bevor sie das unbegrenzte Gebiet erreicht, entfallen alle Integrale in Gl. (2.67), die v 0 enthalten.
Mit dieser Annahme reduziert sich die schwache Form der Galbrun-Gleichung im unbegrenzten Gebiet auf
Z
Z Z
1
− 2 p̄p1 + ∇p̄ · w + w̄ · ∇p1 − ω 2 ρ0 w̄ · w − p̄(w · n) , (2.77)
0 = lim
R→∞
ρ0 c0
ΩR
ΩR
ΓR
wenn der Radius R des künstlichen Randes in der Unendlichkeit liegt.
Gemäß Gl. (2.77) muss die Sommerfeld-Abstrahlbedingung für die Verschiebung formuliert werden. Daher findet die Beziehung zwischen Druck und Verschiebung
d2 w
= −ρ0 (−ω 2 w − 2iωv 0 · ∇w + v 0 · ∇(v 0 · ∇w))
dt2
= ρ0 ω 2 w mit v 0 = 0
∇p1 = −ρ0
(2.78)
Anwendung und die Sommerfeld-Abstrahlbedingung schreibt sich
∂p1
= ∇p1 · n = ρ0 ω 2 w · n = ikp1 .
∂n
Die Galbrun-Gleichung im unbegrenzten Gebiet ist demnach
Z Z
Z
1
ik
0 = lim
− 2 p̄p1 + ∇p̄ · w + w̄ · ∇p1 − ω 2 ρ0 w̄ · w −
p̄p1 ,
R→∞
ρ0 ω 2
ρ0 c0
ΩR
ΩR
(2.79)
∀p̄, w̄ .
ΓR
(2.80)
26
Akustische Grundlagen
Einsetzen der Sommerfeld-Abstrahlbedingung in Gl. (2.69) führt auf die schwache Form
der Helmholtz-Gleichung im unbegrenzten Gebiet
0 = lim
Z
R→∞
Z
Z
∇p · ∇p̄ − ik
ΩR
p p̄ − k 2
ΓR
p p̄ ,
∀p̄ .
(2.81)
ΩR
2.1.7 Diskretisierung
Für die Berechnungen wird das zu untersuchende Gebiet diskretisiert. Dabei wird das Nahfeld ΩC innerhalb und um den abstrahlenden Körper mit finiten Elementen (FE) vernetzt.
An diesen Bereich werden infinite Elemente (IE) angesetzt, um das Geschehen in großer Entfernung vom Körper abzubilden.
In einem beliebigen finiten bzw. infiniten Element T eines derartig diskretisierten Netzes
werden Druck und Verschiebung mit der folgenden Formulierung approximiert
p1 |T (x) ∼
= ph |T (x) =
nnod
Xel
w |T (x) ∼
= wh |T (x) =
ξi Ni (x) und
i=1
nnod
Xel
ξi W i (x) ,
i=1
wobei nnodel für die Anzahl der jeweiligen Knoten im Element steht und die Ansatzfunktion
Ni bzw. W i eine Funktion im Element T ist, die den Wert Eins in einem Knoten hat und
in allen anderen Knoten des Elements null ist. Der Wert ξi entspricht dem Druck bzw. der
Verschiebung in diesem Knoten.
Der Druck p wird im gesamten Gebiet als eine kontinuierliche Funktion approximiert,
so dass p |T ∼
= ph |T . Da globale Kontinuität gefordert wird, werden die Werte ξi einmalig in
den Knoten des Netzes definiert, gehören aber gleichzeitig zu mehreren Elementen. Gleiches
trifft auf die Verschiebung zu. Daher gilt global
p1 (x) ∼
= ph (x) =
nnod
X
w(x) ∼
= wh (x) =
ξi Ni (x) und
i=1
nnod
X
ξi W i (x) ,
(2.82)
(2.83)
i=1
mit nnod als Anzahl der Knoten im Netz und Ni als kontinuierliche Funktionen, wie zuvor
definiert. Der gleiche Zusammenhang gilt auch für die Testfunktionen p̄ und w̄
p̄(x) ∼
= p̄h (x) =
nnod
X
w̄(x) ∼
= w̄h (x) =
ξi N̄i (x) und
i=1
nnod
X
i=1
mit N̄i und W̄ i als kontinuierliche Funktionen.
ξi W̄ i (x) ,
(2.84)
(2.85)
2.1 Galbrun-Gleichung
27
Elementtypen
Komplexe dreidimensionale Strukturen lassen sich am besten mit Tetraederelementen abbilden, welche auch für die hier beschriebenen Berechnungen verwendet werden. Bei einem
mit Tetraedern vernetzten Modell setzt sich der Außenrand aus Dreieckselementen zusammen. Diese bilden die Grundlage für das Aussehen der infiniten Elemente. Ausgehend von
den Dreieckselementen werden die IE in radialer Richtung entwickelt.
Wird die druckbasierte Helmholtz-Gleichung verwendet, werden für die finiten und die
infiniten Elemente Lagrange-Elemente zweiter Ordnung (P2 ) gewählt. Im Fall der gemischten Galbrun-Gleichung hingegen werden Taylor-Hood-Elemente (T H) genutzt, da diese sowohl Druck- als auch Verschiebungsfreiheitsgrade besitzen. Dabei benötigt man für den
Druck einen linearen und für die Verschiebung einen quadratischen Ansatz. Abbildung 2.3
zeigt beide Varianten für ein finites und Abbildung 2.4 für ein infinites Element.
z
z
p
w
y
y
x
x
Abbildung 2.3: Finites Lagrange-Element zweiter Ordnung (links) und finites Taylor-HoodElement (rechts).
r
a(x)
r
a(x)
Abbildung 2.4: Infinites Lagrange-Element zweiter Ordnung (links) und infinites TaylorHood-Element (rechts).
28
Akustische Grundlagen
Begrenztes Gebiet
Im Bereich der finiten Elemente lassen sich die Ansatz- und Testfunktionen für die einzelnen Knoten leicht ermitteln. Sie haben den Wert Eins im zugehörigen Knoten und den Wert
Null in allen anderen Knoten. Ob diese Funktionen linear oder quadratisch sind hängt einerseits vom verwendeten Elementtyp und andererseits von der betrachteten Variable (Druck
oder Verschiebung) ab. Demzufolge besitzt ein einzelnes Lagrange-Tetraederelement zweiter Ordnung einen Freiheitsgrad von zehn und ein einzelnes Taylor-Hood-Tetraederelement
einen Freiheitsgrad von 34. Für die Knoten der Verschiebung ist zu beachten, dass sie jeweils
einen Freiheitsgrad je Raumrichtung aufweisen.
Setzt man die zu Beginn dieses Abschnitts dargestellten approximierten Funktionen in die
schwache Formulierung der Galbrun-Gleichung (2.75) ein, erhält man
0=
nnod
X
i=1
ξi −
Z
N̄i Nj
+
ρ0 c20
ΩC
Z
− iω
Z
Z
∇N̄i · W j +
ΩC
W̄ i · ∇Nj −
ΩC
Z
ρ0 (v 0 · ∇W̄ i ) · (v 0 · ∇W j )
ΩC
Z
ρ0 W̄ i · (v 0 · ∇W j ) + iω
ΩC
−ω
Z
ρ0 (v 0 · ∇W̄ i ) · W j
ΩC
ρ0 W̄ i · W j , j = 1, 2 . . . nnod .
2
(2.86)
ΩC
Im Fall der Helmholtz-Gleichung (2.76) lautet die diskretisierte Form
0=
nnod
X
i=1
Z
ξi
(∇Ni · ∇Nj − k 2 Ni Nj )dΩC ,
j = 1, 2 . . . nnod .
(2.87)
ΩC
Enthalten die Integrale ein ω 2 bzw. ein k 2 handelt es sich um Terme der Massenmatrix. Terme der Dämpfungsmatrix enthalten ein iω bzw. ik, während die übrigen Terme in die Steifigkeitsmatrix eingehen.
Unbegrenztes Gebiet
Bettess und Zienkiewicz [28] schlagen 1977 erstmals die Verwendung infiniter Elemente für
akustische Probleme vor. Anfang der 1980er Jahre entwickeln Astley u. a. [5, 10] eine ähnliche
Formulierung der infiniten Elemente mit dem entscheidenden Unterschied in der Verwendung einer Testfunktion, die die komplex konjugierte der Ansatzfunktion ist. Hintergrund
dieser Entwicklung ist, dass alle Integrale explizit für jedes IE definiert sein müssen. Auch
aktuell gibt es verschiedene Ansätze, die sich mit diesem Problem auseinandersetzen, z. B.
von Astley [8] oder Burnett [32]. Astley und Leis empfehlen die Verwendung einer komplex konjugierten Testfunktion, die zusätzlich mit einer geometrischen Wichtung multipliziert wird. Der Vorteil dieser Formulierung ist zum Einen das Verschwinden des Randintegrals und zum Anderen, dass die zu lösenden Integrale zwar auf unsymmetrische Matrizen
führen, diese aber rein reell sind. Leis [87] zeigt, dass aufgrund der gewichteten Testfunktion die Sommerfeld-Abstrahlbedingung in der schwachen Formulierung erfüllt ist und somit
das Randintegral verschwindet.
2.1 Galbrun-Gleichung
29
Mit den ersten infiniten Elementen konnte das asymptotische Verhalten von Wellen nicht
exakt abgebildet werden [12]. Infolgedessen präsentieren Zienkiewicz u. a. 1985 [129] eine
Weiterentwicklung ihres 1977 eingeführten infiniten Elements. Dabei werden Ansatzfunktionen verwendet, die eine korrekte Abbildung des asymptotischen Verhaltens ermöglichen.
Diese Elemente werden als mapped 2 IE bezeichnet. Marques und Owen [92] zeigen Beispiele
für die Verwendung dieser Elemente im ein-, zwei- und dreidimensionalen Fall. Der Außenrand des FE-Netzes muss bei dieser Formulierung nicht mehr exakt kugelförmig sein. In den
1990er Jahren erweiterten Astley u. a. [14] diese mapped IE mit komplex konjugierten Testfunktionen und einer geometrischen Wichtung. Diese Formulierung wurde anschließend
auf dreidimensionale Probleme angewendet [15, 41]. Der Vorteil der beliebig wählbaren
Struktur des inneren Berechnungsgebiets wird durch einen entscheidenden Nachteil beeinträchtigt. Die IE müssen sich außerhalb einer Kugel befinden, die man um den Körper legen kann. Anderseits konvergiert diese Formulierung nicht [34]. Diese Bedingung folgt aus
dem Atkinson-Wilcox-Theorem [122]. Dieses Theorem besagt, dass jedes beliebig gestreute
Lösungsfeld durch eine konvergierende Reihe mit inverser Potenz zum Abstand erweiterbar ist. Ist der führende Koeffizient der Reihe bekannt, ist die komplette Reihe und somit die
Lösung bis hin zur kleinsten Kugel, die man um den abstrahlenden Körper legen kann, wiederherstellbar [43]. Eine Lösung innerhalb dieser Kugel ist jedoch nicht möglich. Vor allem
bei der Berechnung schmaler, länglicher Körper erfordert selbst die kleinstmögliche um den
Körper zu legende Kugel die Vernetzung eines großen Bereichs mit FE. Dies führt zu einem
hohen Freiheitsgrad des Systems und wirkt sich somit nachteilig auf die Rechenzeit aus. Diesen Nachteil nahmen Burnett und Holford unter anderem zum Anlass für die Entwicklung
eines unkonjugierten, kugeligen (engl. spheroidal ) IE, welches sie patentieren ließen [34, 35].
Burnett und Holford fordern dabei einen Rotationsellipsoid als Außenrand der FE. Dieser
weist entweder eine abgeplattete (engl. oblate ) oder eine verlängerte (engl. prolate ) Form
auf [32, 33]. Mit dieser Formulierung ist es nicht nur möglich, schmale, lange Körper mit wenigen finiten Elementen zu vernetzen, sondern sie ersetzt zusätzlich das Atkinson-WilcoxTheorem. Kurze Zeit später erfolgte, ebenfalls von Burnett, eine Erweiterung der spheriodal
Koordinaten auf Ellipsoidkoordinaten [36], welche die Anwendung noch flexibler gestaltet.
Shirron und Babuška [110] präsentieren die Verwendung des Burnett Elements mit konjugierten Testfunktionen für Zylinder, Kugeln und Rotationsellipsoide. Einen Wichtungsfaktor führen sie jedoch nicht ein. Die Ergänzung um eine geometrische Wichtung der komplex
konjugierten Testfunktionen erfolgt von Astley [6]. Die Elemente dieser Formulierung sind
als komplex konjugierte Astley-Leis-Elemente bekannt und werden in dieser Arbeit verwendet [6, 7, 14, 15, 16, 75]. Weitere Informationen und ein Vergleich zwischen konjugierten und
unkonjugierten IE finden sich bei Gerdes [63].
Die Ansatzfunktionen der finiten und infiniten Elemente müssen auf dem Rand ΓC kompatibel sein. Daher werden die Funktionen der IE auf dem Rand zu zweidimensionalen Ansatzfunktionen reduziert. Die Ansatzfunktionen für den Druck und die Verschiebung lauten
Ni (r, ϑ, ϕ) =Pi (r, ϑ, ϕ)eikµ(r,ϑ,ϕ)
ikµ(r,ϑ,ϕ)
W i (r, ϑ, ϕ) =P i (r, ϑ, ϕ)e
2
sowie
(2.88)
(2.89)
Die Autorin konnte für diesen Begriff keine passende deutsche Übersetzung finden. Auch in anderer deutschsprachiger Literatur wird der englische Begriff verwendet [46].
30
Akustische Grundlagen
und die Testfunktionen ergeben sich zu
N̄i (r, ϑ, ϕ) =g(r, ϑ, ϕ)Pi (r, ϑ, ϕ)e−ikµ(r,ϑ,ϕ)
sowie
W̄ i (r, ϑ, ϕ) =g(r, ϑ, ϕ)P i (r, ϑ, ϕ)e−ikµ(r,ϑ,ϕ) ,
(2.90)
(2.91)
wobei k = cω0 die Wellenzahl ist. Weiterhin sind µ die Phasenfunktion, g die Wichtung für
Polarkoordinaten und Pi bzw. P i die reelle Interpolationsfunktion.
Für die nähere Erläuterung dieser Größen wird in Abbildung 2.5 ein infinites Referenzelement dargestellt, welches für die Berechnungen genutzt wird. Dargestellt ist ein TaylorHood-Element, Koordinatensystem und Abmessungen sind identisch zu einem LagrangeReferenzelement. Die Form des Referenzelements ergibt sich aus den verwendeten finiten
x
1
−1
0
1
a(x)
z
1
y
Abbildung 2.5: Infinites Taylor-Hood-Referenzelement. Die Darstellung eines LagrangeReferenzelements ist analog dazu.
Elementen. Die Tetraederelemente bilden dreieckige Flächen auf dem Rand des FE-Gebiet
begrenzenden Ellipsoids. Folglich handelt es sich bei dem infiniten Referenzelement um ein
Prisma mit dreieckiger Grundfläche. Die Fläche mit z = −1 liegt auf dem Rand ΓC auf. Das
Referenzelement befindet sich in den Intervallgrenzen von [0, 1] für die x- und y-Richtung
und von [−1, 1] für die z-Richtung. Alle betrachteten Längen und Abstände in diesem Element werden als dimensionslose Größen behandelt. Die in Abbildung 2.5 zusätzlich angetragene Länge a(x) gibt an, dass, nach der Transformation zum realen infiniten Element, der
Abstand zwischen z = −1 und z = 0 genau dem Radius vom Koordinatenursprung bis zum
Rand ΓC entspricht. Die Position z = 1 entspricht dem virtuellen Rand ΓR und liegt somit
im Unendlichen. Der erste Interpolationspunkt liegt stets auf dem Rand ΓC und ist identisch
zu dem FE-Knoten an dieser Stelle. Die Positionen der weiteren Interpolationspunkte ergeben sich in Abhängigkeit vom verwendeten Polynom. Die Lage der Interpolationspunkte
wird auf verschiedene Weisen ermittelt, z. B. über Lagrange-, Legendre- [8, 9] oder JacobiPolynome [47, 50]. In dieser Arbeit werden Jacobi-Polynome verwendet. Dreyer und von
Estorff [45, 46] weisen eine deutlich bessere Konditionierung der Systemmatrix bei Verwendung von Jacobi-Polynomen nach. Zusätzlich verfügen sie im Vergleich zu Lagrange- und
Legendre-Polynomen über ein stabileres Verhalten bezüglich der Konvergenz.
2.1 Galbrun-Gleichung
31
Die numerische Integration der zuvor beschriebenen Gleichungen erfolgt unter Verwendung der Gauß-Quadratur. Folglich müssen die Phasenfunktion µ, die Wichtung für Polarkoordinaten g und die reelle Interpolationsfunktion Pi bzw. P i ebenfalls von den Gaußpunkten abhängen. Der im Folgenden verwendete dimensionslose Parameter rgp entspricht der
z-Koordinate des jeweiligen Gaußpunkts im infiniten Referenzelement. Berechnet werden
diese Größen über
1 + rgp
,
1 − rgp
1 − rgp 2
und
g=
2
µ =a(x)
I
Pi (r, ϑ, ϕ) =λwr (ϑ, ϕ)(1 − rgp )Lsp (rgp ) sowie
I
P i (r, ϑ, ϕ) =λwr (ϑ, ϕ)(1 − rgp )Lsp (rgp ) .
Die Strecke a(x) entspricht dem Abstand eines Knotens auf dem Rand des FE-Bereichs ΓC
vom Koordinatenursprung, wie in Abbildung 2.4 erkennbar ist. Der Skalierungsfaktor λ
hängt von der Art und der Dimension des Elements ab. Für den hier untersuchten Fall eines
dreidimensionalen Tetraederelements ist λ = 1−r1 gp . Weiterhin ist wr bzw. wr die zweidimenI
sionale Ansatzfunktion und Lsp ist ein Lagrange-Polynom der Ordnung (Ip − 1)
I
Lsp
Ip
Y
rgp − rq
=
rs − rq
mit s 6= q .
q=1
Ip bestimmt dabei die Anzahl der Interpolationspunkte mit s = 1, 2, . . . , Ip . Die Koordinaten
rq und rs geben die z-Koordinaten der Gaußpunkte im Referenzelement an und sind somit
ebenfalls dimensionslose Größen.
Der Index i der Interpolationsfunktion leitet sich von i = Ip (rad − 1) + s ab, wobei rad die
Nummer des radialen Strahls ist, welcher zu diesem Zeitpunkt betrachtet wird. Sowohl für
Lagrange-Elemente zweiter Ordnung als auch für Taylor-Hood-Elemente läuft rad von 1 bis
6, wie Abbildung 2.4 zu entnehmen ist. Diese Formulierung der Ansatz- und Testfunktionen
lässt sich auch in Fuß u. a. [54] finden.
Analog zur Behandlung der finiten Elemente werden nun die approximierten Ansatz- und
Testfunktionen in die Galbrun-Gleichung bzw. die Helmholtz-Gleichung eingesetzt, wobei
die Randintegrale nicht mit betrachtet werden müssen. Vor dem Einsetzen wird eine weitere
Annahme getroffen. Die Geschwindigkeit v 0 ist vor Erreichen des Randes ΓC abgeklungen
und somit werden alle Integrale, die v 0 enthalten, eliminiert. Die Galbrun-Gleichung (2.80)
ist demnach
Z nnodIE
X
N̄i Nj
2
0=
ξi
−
+ ∇N̄i · W j + W̄ i · ∇Nj − ω ρ0 W̄ i · W j , j = 1, . . . nnodIE .
ρ0 c20
i=1
Ωel
R
(2.92)
Für die Helmholtz-Gleichung ergibt sich [15]
nnodIE
X
i=1
Z
ξi
ΩR
∇Ni · ∇N̄j − k 2 Ni N̄j = 0 ,
j = 1, . . . nnodIE .
(2.93)
32
Akustische Grundlagen
Um eine bessere Vorstellung vom Aussehen der Integrale zu bekommen, werden in einem
weiteren Schritt die Ansatz- und Testfunktionen eingesetzt. Für die Galbrun-Gleichung folgt
Z nnodIE
X
1
− 2 gPi Pj + Pi ∇g · P j + g∇Pi · P j + gP i · ∇Pj
0=
ξi
ρ0 c0
i=1
Ωel
R
Z
1
(gPi ∇µ · P j − gP i · ∇µPj )
c0
− iω
Ωel
R
Z
−ω 2 ρ0
gP i · P j
(2.94)
Ωel
R
und für die Helmholtz-Gleichung
Z
nnodIE
X
0=
ξi ∇Pi · (Pj ∇g + g∇Pj )
i=1
Ωel
R
Z
(gPj ∇Pi · ∇µ − Pi Pj ∇µ · ∇g − gPi ∇µ · ∇Pj )
− ik
Ωel
R
Z
−k 2
gPi Pj (1 − ∇µ · ∇µ) .
(2.95)
Ωel
R
Sowohl für Gl. (2.94) als auch für Gl. (2.95) entsprechen die Terme in der ersten Zeile Steifigkeitstermen, jene in der zweiten Zeile Dämpfungstermen und die in der dritten Zeile Massentermen.
Der Freiheitsgrad der infiniten Elemente ist nicht nur von der Wahl des Elementtyps sondern auch vom gewählten Polynomgrad abhängig.
2.2 Koordinatensysteme
Infolge der verwendeten infiniten Elemente bildet der Außenrand des FE-Netzes einen Ellipsoid, an den die IE angesetzt sind. Folglich werden die infiniten Elemente über Ellipsoidkoordinaten (engl. prolate spheroidal coordinates ) beschrieben, während für die finiten Elemente
kartesische Koordinaten genutzt werden. Abbildung 2.6 zeigt die verwendeten Koordinatensysteme in einem Ellipsoid.
Die kartesischen Koordinaten lassen sich in Ellipsoidkoordinaten umrechnen. Der Radius
ρ sowie die Winkel ϑ und ϕ ergeben sich über
p
1 p 2
ρ=
x + y 2 + (f oc − z)2 + x2 + y 2 + (f oc + z)2 ,
2
z ϑ =arccos
und
r
0
für x = 0 und y = 0
(2.96)
ϕ=
,
atan2 (y, x) sonst
2.3 Modalanalyse
33
y
ρ
ϑ
ϕ
x
z
Abbildung 2.6: Kartesische Koordinaten (x, y, z) und Ellipsoidkoordinaten (ρ, ϑ, ϕ).
√
mit dem Fokus f oc = a2 − b2 , wobei a die Länge und b die Breite des Ellipsoids darstellen.
Die Funktion atan2(y, x) ist mit
y
für x > 0
arctan
x
y
arctan x + π für x < 0 ,y ≥ 0
arctan xy − π für x < 0 ,y < 0
atan2(y, x) =
(2.97)
π
+
für x = 0 ,y > 0
π2
−2
für x = 0 ,y < 0
definiert.
Der Gradient eines Skalars wird mit
∇φ =
gebildet, wobei
s
hr =
r2 − f oc2 cos2 ϑ
,
r2 − f oc2
1 ∂φ
1 ∂φ
1 ∂φ
~er +
~eϑ +
~eϕ
hr ∂r
ht ∂ϑ
hp ∂ϕ
ht =
p
r2 − f oc2 cos2 ϑ ,
hp =
(2.98)
p
r2 − f oc2 sinϑ
gilt [12, 32].
2.3 Modalanalyse
Aus den im Abschnitt 2.1 hergeleiteten diskretisierten Gleichungen werden, bei Betrachtung
des gesamten Berechnungsgebiets, die globalen Matrizen für Steifigkeit K, Dämpfung D
und Masse M gebildet. Die Matrizen für das aus finiten und infiniten Elementen bestehende
Gebiet führen im allgemeinen Fall auf ein quadratisches Eigenwertproblem
(K − iωD − ω 2 M )Ξ = 0 ,
(2.99)
bei dem alle Matrizen reell, unsymmetrisch und unabhängig von der Eigenkreisfrequenz
sind. Zudem sind die Matrizen schwach besetzt. Der Vektor Ξ enthält die einzelnen Knotenwerte der FE und IE.
Es sind dabei zwei Spezialfälle zu beachten:
a) Ist das Berechnungsgebiet kugelförmig, ist die Massenmatrix der infiniten Elemente
aufgrund der geometrischen Symmetrieeigenschaften null.
b) Im Fall der Helmholtz-Gleichung ist die Dämpfungsmatrix der finiten Elemente null.
34
Akustische Grundlagen
Für die Modalanalyse wird das quadratische Eigenwertproblem in den Zustandsraum überführt und somit linearisiert. Im Allgemeinen hat es die Form
(A − λB)Φ = 0 ,
(2.100)
mit λ = −iω und Φ = [λΞ Ξ]T .
Es gibt verschiedene Möglichkeiten, die Matrizen A und B aufzustellen. Eine weit verbreitete Form ist [38, 88, 93, 106]
A=
M
0
0
−K
,
B=
0
M
M
D
.
(2.101)
Will man mittels der FEM aussagekräftige Ergebnisse erzielen, ist häufig eine feine Vernetzung des Modells erforderlich, welche einen großen Freiheitsgrad des Systems und somit eine zeitintensive Berechnung zur Folge hat. In der Regel sind jedoch nur einzelne Eigenwerte
von Interesse, sodass die vollständige Lösung des Eigenwertproblems nicht notwendig ist.
Daher kommen iterative Löser zum Einsatz, die entsprechend des zu betrachtenden Problems ausgewählt werden. Ein Überblick über einzelne Verfahren ist z. B. in Saad [107], bei
Meerbergen und Spence [94] sowie in Mehrmann und Voss [95] zu finden. In dieser Arbeit
wird ein Arnoldi-Eigenwertalgorithmus verwendet, der große, schwach besetzte und unsymmetrische Matrizen effizient löst. Wie die meisten iterativen Löser, verlangt der ArnoldiAlgorithmus ein Standard-Eigenwertproblem der Form Ax = λx, d. h. entweder muss die
Matrix A oder die Matrix B invertiert werden. Berücksichtigt man den Spezialfall a) bzw. b),
ist erkennbar, dass bei der Verwendung der Zustandsraumformulierung (2.101) die Matrix
A bzw. die Matrix B singulär wird. Das hat Schwierigkeiten beim Invertieren der Matrix zur
Folge. Aufgrund dessen hat sich die Autorin dafür entschieden, die von Ruge [105] vorgeschlagene Zustandsraumformulierung zu verwenden
A=
I
0
0 −K
,
B=
0
M
I
D
,
(2.102)
welche die beschriebene Problematik umgeht und bereits in Fuß [55] diskutiert ist. Die Standardformulierung von Gl. (2.100) unter Verwendung von Gl. (2.102) lautet
1
Φ = A−1 BΦ .
λ
(2.103)
Daher wird in jedem Iterationssschritt i des Arnoldi-Algorithmus ein lineares Gleichungssystem der Form
AΦi+1 = BΦi
(2.104)
gelöst. Für die Berechnung von Φi+1 wird ein vorkonditionierter GMRes-Algorithmus3 [108]
mit einem unvollständigen LU-Vorkonditionierer (ILU)4 [107] genutzt.
3
GMRes steht für generalized minimal residual und ist ein numerisches Verfahren zur iterativen Lösung großer,
schwach besetzter sowie linearer Gleichungssysteme.
4
ILU steht für incomplete lower upper. Dabei handelt es sich um einen Vorkonditionierer, der die Lösung des
GMRes beschleunigen soll.
2.4 Validierung
35
2.4 Validierung
Die entwickelten Programmcodes für die numerische Modalanalyse werden anhand von
Beispielen validiert. Sowohl für die Helmholtz-Gleichung als auch für die Galbrun-Gleichung werden je ein sinnvoller Anschauungsfall gewählt, der die verschiedenen auftretenden Effekte abbildet. Vorteil dabei ist, dass deren Resultate bekannt sind und somit eine
Validierung ermöglichen.
2.4.1 Helmholtz-Gleichung
Zur Validierung des entwickelten Programmcodes, der auf der Formulierung der Helmholtz-Gleichung basiert, wird das in der Literatur häufig beschriebene Modell einer Vollkugel verwendet. Die Kugel hat einen Radius von r = 1 m und befindet sich in Luft bei einer
Schallgeschwindigkeit von c0 = 340 m
s.
Damit das FE-Netz axialsymmetrisch bzgl. der drei Raumachsen ist, wird zunächst nur 18
der Kugel mit Tetraederelementen vernetzt und dieses im Anschluss gespiegelt. Es werden
fünf verschieden feine Netze genutzt, die mithilfe der Anzahl der finiten Elemente in einer
Kugel nel unterschieden werden. Abbildung 2.7 zeigt die fünf Kugelmodelle.
(a) nel = 192
(b) nel = 728
(c) nel = 1392
(d) nel = 6344
(e) nel = 10200
Abbildung 2.7: Verwendete Kugelnetze der fünf verschiedenen Elementgrößen, dargestellt
in Abhängigkeit von der Anzahl der Elemente nel.
Für die finiten und infiniten Elemente werden Lagrange-Elemente zweiter Ordnung verwendet. Zunächst werden die ersten zehn Eigenformen der fünf verschiedenen Netze berechnet. Für alle Netze werden infinite Elemente mit drei Interpolationspunkten gewählt.
Die Ergebnisse sind in Tabelle 2.1 dargestellt. Die erste und die fünfte Eigenform entsprechen einem Monopol, die Eigenformen zwei, drei und vier sind Dipole und die Eigenformen
sechs bis zehn sind Quadrupole. Eine abstrahlende Kugel besitzt drei verschiedene Eigenvektorformen für Dipole sowie fünf verschiedene für Quadrupole. Die hier vorliegenden
Ergebnissen stimmen damit überein. Weiterhin findet man in Marburg u. a. [89], dass bei
derartigen Außenraumproblemen einzelne Eigenvektoren mehrmals auftreten, wie es auch
hier für den Monopol der Fall ist. Ein Überblick über diese Elementarstrahler, d. h. über Kugelstrahler n-ter Ordnung, befindet sich in der DEGA–Empfehlung [1]. Ein Monopol ist ein
Kugelstrahler nullter Ordnung, bei einem Dipol handelt es sich um einen Kugelstrahler erster Ordnung, während man bei einem Quadrupol von einem Kugelstrahler zweiter Ordnung
spricht.
Der Vergleich der einzelnen Frequenzen für die verschieden feinen Netze zeigt kaum Konvergenz, die man vom groben zum feinen Netz hin erwarten könnte. Auch dieser Umstand
wurde bereits in [89] gezeigt.
36
Akustische Grundlagen
Tabelle 2.1: Eigenfrequenzen in Hz bei drei Interpolationspunkten Ip = 3 der infiniten Elemente; die Nummerierung entspricht der Nummerierung der Eigenvektoren.
i
nel = 192
nel = 728
nel = 1392
nel = 6344
nel = 10200
1
-8, 82758112
-8, 82758112
-8, 82758112
-8, 82758111
-8, 82758111
2
-41, 03291139
-40, 00936584
-40, 49578830
-40, 48855295
-40, 37784072
3
-41, 47572363
-40, 92574027
-45, 95153756
-43, 85444508
-39, 96888864
4
-46, 17879345
-40, 24418013
-46, 99882301
-47, 23933822
-42, 12920437
5
-62, 19531226
-62, 19531245
-62, 19531219
-62, 19531214
-62, 19531213
6 -102, 08068261
-91, 62094546
-97, 94461057
-95, 99662158
-96, 18000628
7
-98, 04968344
-97, 18036026
-95, 83340229
-96, 38718915
-92, 71276518
8 -122, 60961566 -113, 10663627 -117, 45995301 -118, 20894021 -116, 11315279
9 -115, 81578028 -111, 47763659 -128, 09470955 -118, 97911823 -107, 69790715
10 -131, 43681732 -108, 02676778 -130, 67166051 -129, 00569903 -115, 23955495
Abbildung 2.8 stellt die zu den berechneten Eigenfrequenzen gehörenden Eigenvektoren
dar. Die Nummerierung der Eigenvektoren von eins bis zehn korreliert mit der in Tabelle 2.1 verwendeten Nummerierung. Jeder Eigenvektor ist sowohl in der Frontalansicht der
Vollkugel als auch im vergrößerten Ausschnitt für 18 der Kugel dargestellt. In der grafischen
Darstellung lassen sich die einzelnen Eigenvektorformen gut erkennen.
Für das Netz mit nel = 728 werden die Eigenwerte bei Verwendung von einem, drei und
fünf Interpolationspunkten berechnet. Die Ergebnisse sind in Tabelle 2.2 dargestellt, wobei
m die Art des Multipols angibt. Außerdem sinkt der Wert des Eigenwerts bei steigendem Ip .
Das Verhalten wurde in der Form auch erwartet [89]. Zusätzlich treten bei größerer Anzahl
der Interpolationspunkte mehr rein reelle Eigenwerte auf.
Tabelle 2.2: Eigenwerte von nel = 728 für drei verschiedene Interpolationspunkte Ip .
Ip = 1
Ip = 3
Ip = 5
i
Eigenwert s−1
m
Eigenwert s−1
m
Eigenwert s−1
m
1
-64, 60 ± 202, 30i Di
-8, 83
M ono
-10, 06
M ono
2
-62, 78 ± 202, 53i Di
-40, 01
Di
-11, 69
Di
3
-63, 25 ± 202, 49i Di
-40, 93
Di
-11, 56
Di
4
-233, 58 ± 50, 15i M ono
-40, 24
Di
-11, 50
Di
5 -200, 23 ± 173, 14i M ono
-62, 20
M ono
-23, 62
Quad
6
-49, 53 ± 275, 89i Quad
-91, 62
Quad
-25, 15
Quad
7
-47, 41 ± 275, 81i Quad
-97, 18
Quad
-27, 50
Quad
8
-41, 23 ± 276, 69i Quad
-113, 11
Quad
-28, 69
Quad
9
-41, 31 ± 277, 20i Quad
-111, 48
Quad
-29, 82
Quad
10 -42, 70 ± 277, 14i Quad
-108, 03
Quad
-13, 51 ± 41, 91i Di
11
-39.73 ± 347.66i
Hex
-160, 12 ± 116, 42i Di
-42, 67
Hex
12
-38.12 ± 347.13i
Hex
-157, 20 ± 134, 66i Di
-44, 64
Hex
2.4 Validierung
37
6
1
.008703
.008708
.008712
.008716
.00872
.008725
.008729
.008733
.008738
.008742
.223E-05
.001033
.002064
.003095
.004126
.005156
.006187
.007218
.008249
.00928
7
2
.151E-06
.001378
.002756
.004134
.005512
.00689
.008268
.009646
.011024
.012402
.429E-07
.001044
.002087
.003131
.004174
.005217
.006261
.007304
.008348
.009391
8
3
.268E-07
.001397
.002795
.004192
.00559
.006987
.008384
.009782
.011179
.012576
.185E-04
.838E-03
.001658
.002478
.003298
.004118
.004938
.005758
.006578
.007398
9
4
.872E-08
.001558
.003117
.004675
.006233
.007791
.00935
.010908
.012466
.014024
5
.534E-06
.913E-03
.001826
.002739
.003652
.004565
.005477
.00639
.007303
.008216
10
.005246
.005384
.005521
.005658
.005795
.005933
.00607
.006207
.006345
.006482
.526E-06
.873E-03
.001746
.002618
.003491
.004363
.005236
.006109
.006981
.007854
Abbildung 2.8: Beträge der Eigenvektoren zu den Eigenfrequenzen 1–10 der Vollkugel mit
Radius r = 1 m, bestehend aus zwei Monopolen (Nr. 1, 5), drei Dipolen (Nr.
2, 3, 4) sowie fünf Quadrupolen (Nr. 6, 7, 8, 9, 10).
38
Akustische Grundlagen
2.4.2 Galbrun-Gleichung
Für die Validierung der Galbrun-Gleichung wird ein Innenraumproblem untersucht. Dabei
wird ein Rohr mit quadratischer Grundfläche der Länge l = 3, 4 m gewählt, welches eine
Kantenlänge von 0, 2 m hat. Das Beispiel wird als Rohrbeispiel bezeichnet. Durch das Rohr
strömt eine Flüssigkeit mit der konstanten Geschwindigkeit v 0 und die Rohrwände werden
als schallhart angesehen, d. h. an den Wänden gilt die Beziehung w · n = 0. An den Rohrenden wird der Druck auf Null gesetzt. Die Theorie zur eindimensionalen analytischen Lösung
besagt, dass bei einer konstanten Strömung die Eigenfrequenzen bei steigender Strömungsgeschwindigkeit sinken [22, 57]. Dieses Verhalten wird anhand des Rohrbeispiels überprüft.
Die analytische Lösung der Eigenfrequenz eines strömenden Mediums im eindimensionalen
Fall lautet
c0 n
v0
und n = 1, 2, . . . ,
(2.105)
fn =
(1 − M a2 ) mit M a =
2l
c0
wobei M a die Machzahl ist. Für die Herleitung der analytischen Lösung wird auf Weisbecker
[119] verwiesen. Handelt es sich bei dem Medium um Luft mit einer Schallgeschwindigkeit
von c0 = 340 m
s , liegen die Eigenfrequenzen im statischen Fall bei 50 Hz, 100 Hz, 150 Hz usw.
Beginnt die Luft durch das Rohr zu strömen, sinken diese Eigenfrequenzen in quadratischer
Abhängigkeit von der steigenden Machzahl. Abbildung 2.9 zeigt die analytische Lösung der
ersten vier Eigenfrequenzen des Rohrbeispiels.
f4
200
f3
150
Hz
f2
100
f1
50
0
Ma
1
Abbildung 2.9: Analytische Lösung der vier ersten Eigenfrequenzen in Abhängigkeit von
der Machzahl.
Die numerische Berechnung für verschiedene Strömungsgeschwindigkeiten liefert analoge Ergebnisse, vgl. Tabelle 2.3. Die numerische Modalanalyse führt auf komplexe Eigenwerte, wobei der Imaginärteil der Frequenz und der Realteil der Dämpfung entspricht. In
der Tabelle sind die Eigenfrequenzen, d. h. lediglich die Imaginärteile der ermittelten Eigenwerte dargestellt. Das zuvor beschriebene Verhalten der sinkenden Eigenfrequenzen ist
deutlich erkennbar. Bei einer Machzahl von M a = 0, 294 (v 0 = 100 m
s ) sind die Eigenfrequenzen in der numerischen Berechnung bereits um 8, 6% bis 9, 6% im Vergleich zum ruhenden
Fluid gesunken. Laut der analytischen Lösung (2.105) ist die Frequenz bei dieser Machzahl
2.4 Validierung
39
um 8, 65% gesunken. Während die Abweichung der ersten und zweiten Eigenfrequenz der
numerischen Lösung noch gut mit der analytischen übereinstimmt, ist sie bei den höheren
Frequenzen etwas größer. Dieses Ergebnis ist nicht unüblich, da höhere Frequenzen bei gleichem Freiheitsgrad des Modells generell ungenauer sind.
Tabelle 2.3: Numerische Lösung des Rohrs bei verschiedenen Strömungsgeschwindigkeiten
im Vergleich zur exakten Lösung; Eigenfrequenz in [Hz].
exakt
v0 = 0 m
v0 = 1 m
v0 = 10 m
v0 = 100 m
s
s
s
s
Ma = 0
Ma = 0
M a = 0, 00294
M a = 0, 02941
M a = 0, 29412
50
100
150
200
50, 02247
100, 16144
150, 56087
201, 39140
50, 02167
100, 15986
150, 55854
201, 38828
49, 96569
100, 02416
150, 34645
201, 08240
45, 66757
91, 28340
136, 78154
182, 03726
Tabelle 2.4 zeigt den Vergleich zwischen den numerisch ermittelten und den analytisch
berechneten ersten beiden Eigenfrequenzen für die verschiedenen Machzahlen. Zusätzlich
werden die Eigenfrequenzen für dieses Modell im Fall eines ruhenden Fluids ermittelt und
sind ebenfalls in der Tabelle angegeben.
Tabelle 2.4: Vergleich zwischen numerischer und analytischer Lösung der ersten zwei Eigenfrequenzen, sowie zur Helmholtz-Lösung im strömungsfreien Fall. Die Eigenfrequenzen sind in [Hz] angegeben.
v0 = 0 m
v0 = 1 m
v0 = 10 m
v0 = 100 m
s
s
s
s
Galbrun
analytisch
Helmholtz
Galbrun
analytisch
Helmholtz
Ma = 0
M a = 0, 00294
M a = 0, 02941
M a = 0, 29412
50, 02247
50, 00000
50, 00003
100, 16144
100, 00000
100, 00093
50, 02167
49, 99957
49, 96569
49, 95675
45, 66757
45, 67474
100, 15986
99, 99913
100, 02416
99, 91350
91, 28340
91, 34948
In Tabelle 2.4 ist erkennbar, dass die Ergebnisse aus der numerischen Modalanalyse unter Verwendung der Galbrun-Gleichung gut mit der analytischen Lösung für die einzelnen
Machzahlen übereinstimmen. Betrachtet man ausschließlich die Lösungen des ruhenden
Fluids, ist jedoch auffällig, dass die Eigenfrequenzen mit der Helmholtz-Gleichung deutlich genauer berechnet werden als mit der Galbrun-Gleichung. Diese Beobachtung wird in
Kapitel 4 erneut aufgegriffen.
Eine Schwierigkeit der numerischen Modalanalyse mittels der Galbrun-Gleichung ist das
Auftreten von Scheinmoden (engl. spurious modes ). Bei Scheinmoden handelt es sich um
Störmoden, die keine physikalische Bedeutung haben. Sie resultieren aus der numerischen
Formulierung und lassen sich leicht an den zugehörigen Eigenvektoren erkennen, da diese
quasi null sind. Daher werden sie im englischen auch als zero energy modes bezeichnet.
Die Lage und Verteilung der Scheinmoden ist von der Strömungsgeschwindigkeit v 0 abhängig. Je größer v 0 , desto weiter reichen sie in die komplexe Ebene hinein. Abbildung
40
Akustische Grundlagen
2.10 stellt alle Eigenwerte des Rohrbeispiels für verschiedene Strömungsgeschwindigkeiten
dar. Die Eigenwerte zu den physikalischen Moden befinden sich auf der imaginären Achse und haben für den stationären Fall, v 0 = 0, einen konstanten Abstand voneinander. Ist
die Machzahl null, befinden sich die Scheinmoden ausschließlich bei null. Mit steigender
Machzahl entfernen sich die Scheinmoden von null entlang der positiven und negativen
Realachse. Zusätzlich reichen sie weiter in die komplexe Ebene hinein. Letzteres bedeutet für die numerische Untersuchung eines Modells, dass keine Unterscheidung zwischen
physikalischen Moden und Störmoden möglich ist, bei dem eine von null verschiedene
Strömungsgeschwindigkeit vorliegt und die Eigenwerte in der komplexen Ebene liegen. In
den Kapiteln 3 und 4 werden derartige Modelle untersucht. Die einzige Unterscheidungsmöglichkeit ist in diesen Fällen die Betrachtung des Eigenvektors.
2.4 Validierung
41
=
=
2000
2000
0
0
−2000
Ma = 0
1000
0
−2000
−1000 <
=
M a = 0, 1
1000
0
−1000 <
=
2000
2000
0
0
−2000
M a = 0, 2
1000
0
−1000 <
−2000
M a = 0, 5
1000
0
−1000 <
Abbildung 2.10: Eigenwerte der physikalischen Moden und der Störmoden bei verschiedenen Machzahlen.
3 Anwendungen
In diesem Kapitel wird der entwickelte Programmcode auf verschiedene Beispiele angewendet. Die FE-Modelle werden in der finiten Elemente Software ANSYS 12.1 erstellt und anschließend in das von der Autorin entwickelte, nicht-kommerzielle Programm eingelesen.
Der Programmcode ist in Fortran 90 geschrieben und trägt den Namen E VAL S A G E. Der Name steht für die englische Abkürzung des Eigenwert-Such-Algorithmus unter Verwendung
der Galbrun-Gleichung (engl.: Eigenvalue Search algorithm with Galbrun equation ). Nach
dem Einlesen des FE-Netzes erfolgt die Implementierung der infiniten Elemente sowie die
numerische Berechnung entsprechend der jeweiligen Fragestellung.
Alle Berechnungen werden im Medium Luft bei Raumtemperatur durchgeführt. Demzukg
folge wird eine Schallgeschwindigkeit von c0 = 340 m
s und eine Dichte von ρ0 = 1, 2 m3
verwendet.
3.1 Berechnung eines stationären Fluids
3.1.1 Eigenwert-Such-Algorithmus
Das an dieses Kapitel anschließende Kapitel 4 widmet sich ausschließlich der Berechnung
eines Fluids innerhalb und im Nahfeld einer Blockflöte und insbesondere der Untersuchung
des Einflusses der Strömung auf die Intonation des Instruments. Im Rahmen dieser Berechnungen sind lediglich die Resonatormoden von Interesse. Merkmal dieser Eigenwerte ist
der signifikant größere Imaginärteil im Vergleich zu ihrem Realteil. Um diese Eigenwerte
effizient zu ermitteln, ohne dabei alle Außenraummoden mitzuberechnen, entwickelten die
Autorin u. a. [54, 56] ein Verfahren, welches den Fokus auf die Berechnung dieser Eigenwerte
legt. Dieses Verfahren ist im Folgenden näher erläutert.
Wird der iterative Arnoldi-Algorithmus auf Gl. (2.103) angewendet, werden zuerst die Eigenwerte bestimmt, die in unmittelbarer Nähe zu null liegen. Die Implementierung eines
Shifts ermöglicht die Berechnung der Eigenwerte, die den geringsten Abstand von diesem
Shift haben. Das aus dem englischen stammende Wort Shift lässt sich allgemein als Frequenzverschiebung übersetzen. Dieser Begriff ist in den hier untersuchten Fällen jedoch nicht exakt
genug, da eine Verschiebung in der komplexen Ebene möglich ist. In dem Fall wird nicht nur
die Frequenz verschoben sondern der komplexe Eigenwert. Daher wird im Folgenden der
Begriff Shift weiter verwendet.
Wie zuvor bereits erwähnt, interessieren nur die Resonatormoden, d. h. die Eigenwerte,
die nah an der Imaginärachse liegen. Daher werden die Shifts entlang der Imaginärachse
gesetzt und für jeden Shift wird die Arnoldi Methode bereits nach der Berechnung einiger
weniger Eigenwerte abgebrochen.
Das quadratische Eigenwertproblem, wie in Abschnitt 2.3 beschrieben, lautet
(K + λD + λ2 M )Ξ = 0 ,
(3.1)
mit dem Parameter λ = −iω. Setzt man einen Shift s, wird λ durch λ = λ̄ + s substituiert.
43
44
Anwendungen
Mit dieser Substitution wird Gl. (3.1) zu
(K + sD + s2 M + λ̄(D + 2sM ) + λ̄2 M )Ξ = 0 ,
(3.2)
(K̄ + λ̄D̄ + λ̄2 M )Ξ = 0
(3.3)
welches auch als
darstellbar ist. Die neu erhaltenen Matrizen der Steifigkeit K̄ und der Dämpfung D̄ sind nun
im Fall eines komplexen Shifts komplex und der Arnoldi-Algorithmus muss auf komplexe
Matrizen angepasst werden. Die Modalanalyse liefert den geshifteten Eigenwert λ̄. Durch
Addition mit dem gewählten Shift wird anschließend der Eigenwert der Ausgangsformulierung ermittelt.
Die Anwendung des Eigenwert-Such-Algorithmus wird anhand eines Beispiels genauer
erläutert. Dazu wird das Gebiet innerhalb und um einen Kasten betrachtet, der an einer Seite geöffnet ist. Dieses einfache Modell lässt sich mit wenigen finiten Elementen vernetzen
und weist daher nur einen geringen Freiheitsgrad auf. Der Außenrand des FE-Gebiets bildet
einen Ellipsoid, an dem die infiniten Elemente angeschlossen sind. Die Matrizen der Steifigkeit K, der Dämpfung D und der Masse M werden im eigenen Fortran 90 Code E VAL S A G E
ermittelt und in das Programm MATLAB 7.11.0 (R2010b) eingelesen. Im Gegensatz zu den im
folgenden Kapitel betrachteten Blockflötenmodellen ist es aufgrund des geringen Freiheitsgrads möglich, dass aufgestellte Eigenwertproblem mittels der eig -Funktion in MATLAB zu
lösen. Die eig -Funktion liefert alle Eigenwerte des Modells, welche anschließend als Referenz zur Überprüfung des Eigenwert-Such-Algorithmus dienen. Dieser Algorithmus wird
auf das Modell mit dem Ziel angewendet, alle Eigenwerte entlang der Imaginärachse zwischen 0 und 100i zu ermitteln.
Bei jedem Schritt werden vier Eigenwerte bestimmt. Als Kriterium für die Berechnung
eines Eigenwerts gilt, dass das Residuum des Eigenwerts kleiner als eine vorgeschriebene
Toleranz ist. Das ist notwendig, da der Arnoldi-Algorithmus eine große Zahl an Eigenwerten
berechnet, von denen die meisten schlechte Eigenwert-Approximationen sind. Deren weitere
Berücksichtigung ist mathematisch nicht sinnvoll.
Im ersten Schritt werden die Eigenwerte berechnet, die am nächsten zum Shift s = 0, d.
h. zum Koordinatenursprung, liegen. Der Abstand vom Shift zum am weitesten entfernten
Eigenwert bestimmt den Radius des Gebiets, innerhalb dessen alle Eigenwerte berechnet
wurden. Abbildung 3.1(a) zeigt den ersten Schritt. Die Kreuze markieren alle Eigenwerte,
die mit der Funktion eig erhalten wurden. Die kleinen Kreise symbolisieren die mithilfe
des Arnoldi-Algorithmus ermittelten Eigenwerte. Der große Kreis begrenzt das Gebiet, in
dem alle Eigenwerte berechnet wurden. Der Mittelpunkt des großen Kreises, mit einem Plus
dargestellt, entspricht der Lage des Shifts. Im zweiten Schritt wird der Shift an der oberen
Grenze des zu berechnenden Bereichs, s = 100i, gesetzt um die Eigenwerte an dieser Stelle
zu ermitteln, Abbildung 3.1(b). Anschließend wird der Shift immer in den Mittelpunkt zwischen zwei Shifts gesetzt, bis sich die großen Kreise überlappen und somit alle Eigenwerte
entlang der Imaginärachse berechnet sind. Dies ist in den Abbildungen 3.1(c) und 3.1(d) erkennbar. Mit dem achten Schritt ist in diesem Fall die Berechnung aller Eigenwerte entlang
der Imaginärachse abgeschlossen.
3.2 Berechnung eines strömenden Fluids
45
100
100
80
80
60
60
40
40
20
20
0
0
=
=
−20
20 −20
0
<
(a) Schritt 1
0
<
20 −20
(b) Schritt 2
0
<
20 −20
(c) Schritt 4
0
<
20
(d) Schritt 8
Abbildung 3.1: Einzelne Schritte des Eigenwert-Such-Algorithmus.
3.2 Berechnung eines strömenden Fluids
3.2.1 Konstante Strömung im gesamten Berechnungsgebiet
Dieses Kapitel schließt mit dem Beispiel einer konstanten Strömung, die nicht nur im FEBereich vorhanden ist, sondern das gesamte Berechnungsgebiet inklusive der infiniten Elemente durchfließt. Die Autorin fand in der Literatur weder Angaben zur Anwendung der
Galbrun-Gleichung auf infinite Elemente noch auf eine dreidimensionale Modalanalyse. Als
Modell wird ein dünnwandiges, auf beiden Seiten geöffnetes Rohr der Länge l = 1, 7 m
gewählt. Die Strömung läuft parallel zur Längsachse des Rohrs und befindet sich sowohl
innerhalb als auch außerhalb desselben. In Abbildung 3.2 sieht man eine schematische Darstellung des Modells.
x
v0
z
y
Abbildung 3.2: Schematische Darstellung des Rohrmodells.
46
Anwendungen
Für dieses Beispiel ist es notwendig, die Galbrun-Gleichung im unbegrenzten Gebiet um
die Terme, die die Strömungsgeschwindigkeit enthalten, zu erweitern. Sie ist somit identisch
zur Formulierung im begrenzten Gebiet (2.86), die im Abschnitt 2.1.7 beschrieben ist. Im
Bereich der infiniten Elemente lautet sie
Z
Z
Z
Z
nnodIE
X
N̄i Nj
0=
ξi −
+
∇N̄i · W j +
W̄ i · ∇Nj −
ρ0 (v 0 · ∇W̄ i ) · (v 0 · ∇W j )
ρ0 c20
i=1
ΩR
ΩR
Z
− iω
Z
2
ΩR
Z
ρ0 W̄ i · (v 0 · ∇W j ) + iω
ΩR
−ω
ΩR
ΩR
ρ0 W̄ i · W j ,
ρ0 (v 0 · ∇W̄ i ) · W j
j = 1, 2 . . . nnodIE .
(3.4)
ΩR
Das Einsetzen der im vorherigen Kapitel beschriebenen Ansatz- und Testfunktionen für
Druck und Verschiebung
Ni = Pi eikµ ,
W i = P i eikµ ,
N̄i = gPi e−ikµ
bzw.
W̄ i = gP i e−ikµ
(3.5)
in die obige Gleichung liefert
0=
nnodIE
X
i=1
(Z −
ξi
ΩR
1
gPi Pj + Pi ∇g · P j + g∇Pi · P j + gP i · ∇Pj
ρ0 c20
−ρ0 (v 0 · ∇gP i ) · (v 0 · ∇P j ) − ρ0 g(v 0 · ∇P i ) · (v 0 · ∇P j )
Z − iω
g
g
g
Pi ∇µ · P j − P i · ∇µPj − ρ0 (v 0 · P i ∇µ) · (v 0 · ∇P j )
c0
c0
c0
ΩR
1
g
(v 0 · ∇gP i ) · (v 0 · P j ∇µ) + ρ0 (v 0 · ∇P i ) · (v 0 · P j ∇µ)
c0
c0
+ρ0 gP i · (v 0 · ∇P j ) − ρ0 (v 0 · ∇gP i ) · P j − ρ0 g(v 0 · ∇P i ) · P j
+ ρ0
Z − ω ρ0
2
ΩR
g
g
(v 0 · P i ∇µ) · (v 0 · P j ∇µ) − P i · (v 0 · P j ∇µ)
2
c0
c0
g
− (v 0 · P i ∇µ) · P j + gP i · P j
c0
)
.
(3.6)
Gleichung (3.6) wird für die Berechnung der infiniten Elemente genutzt. Im Vergleich dazu, lautet die diskretisierte schwache Formulierung der Galbrun-Gleichung im Bereich der
3.2 Berechnung eines strömenden Fluids
47
finiten Elemente
Z
Z
nnod
X Z N̄i Nj Z
0=
ξi −
+
∇
N̄
·
W
+
W̄
·
∇N
−
ρ0 (v 0 · ∇W̄ i ) · (v 0 · ∇W j )
i
j
i
j
2
ρ
c
0
0
i=1
ΩC
Z
− iω
ΩC
ΩC
ΩC
Z
ρ0 W̄ i · (v 0 · ∇W j ) + iω
ΩC
Z
−ω 2
ρ0 W̄ i · W j ,
ρ0 (v 0 · ∇W̄ i ) · W j
ΩC
j = 1, 2 . . . nnod ,
(3.7)
ΩC
wobei in diesem Fall Ni und N̄i beziehungsweise W i und W̄ i die linearen beziehungsweise
quadratischen Ansatz- und Testfunktionen des Drucks und der Verschiebung im jeweiligen
finiten Taylor-Hood Element sind.
Abbildung 3.3 stellt das Berechnungsgebiet in einer zweidimensionalen Skizze dar. Dabei
ist die Vernetzung angedeutet. Innerhalb und im Nahfeld des Rohrs sind die finiten Elemente
skizziert. Der Ellipsoid repräsentiert den Übergang zu den infiniten Elementen. Dargestellt
sind zwei infinite Elemente mit je zwei Interpolationspunkten.
FE-Gebiet
IE-Gebiet
Rohr
v0
Abbildung 3.3: Vernetzung des Berechnungsgebiets, angedeutet mit finiten und infiniten
Elementen. Die Darstellung erfolgt für eine bessere Übersicht in 2D.
Für die Berechnungen wird das Programm E VAL S A G E genutzt. Betrachtet wird der erste
Eigenwert des Rohrs, zunächst im Fall eines ruhenden Fluids und anschließend bei steigender Strömungsgeschwindigkeit. Bei diesem Eigenwert handelt es sich um eine innere
Mode. Tabelle 3.1 zeigt die Ergebnisse des ersten Eigenwerts in Abhängigkeit von der Machzahl. Die Berechnungen werden mit Luft bei einer Schallgeschwindigkeit von c0 = 340 m
s
durchgeführt. Die Machzahl entspricht dem Verhältnis der Strömungsgeschwindigkeit zur
|
Schallgeschwindigkeit M a = |vc0z
.
0
Der Realteil des Eigenwerts entspricht der Dämpfung, während der Imaginärteil die Eigenfrequenz repräsentiert. Aus der Tabelle ist entnehmbar, dass der Eigenwert bei steigender
Strömungsgeschwindigkeit sinkt. Dieser Effekt wurde erwartet und bereits im vorherigen
Kapitel im Rahmen der Validierung beschrieben.
Abbildung 3.4 zeigt die grafische Darstellung des Eigenvektors für eine Machzahl von
M a = 1 · 10−3 .
48
Anwendungen
Tabelle 3.1: Numerische Ergebnisse des Rohrs bei konstanter Strömungsgeschwindigkeit.
Machzahl M a Geschwindigkeit v0z [ m
Eigenwert s−1
s]
0
0
−1, 470 + 95, 830i
1 · 10−4
0, 034
−1, 343 + 94, 413i
−3
1 · 10
0, 34
−0, 193 + 93, 070i
0, 01
3, 4
−0, 033 + 90, 712i
0, 1
34
−0, 019 + 87, 728i
.822E-10
.348E-03
.174E-03
.696E-03
.522E-03
.001044
.870E-03
.001392
.001218
.001566
Abbildung 3.4: Grafische Darstellung des Eigenvektors (Druckverteilung) für den Fall einer
Machzahl von M a = 1 · 10−3 .
Ein Vorteil der komplex-konjugierten Astley-Leis Elemente besteht darin, dass der Ellipsoid dicht um den abstrahlenden Körper platziert werden kann. Die Größe des äußeren FENetzes sowie die Anzahl der Interpolationspunkte der IE haben lediglich einen geringen
Einfluss auf die Eigenfrequenzen des inneren Bereichs, vgl. Tabelle 3.2. Hinzufügen weiterer
Interpolationspunkte bzw. eine Vergrößerung des FE-Gebiets hat nur minimale Änderungen
unterhalb 0,4% zur Folge. Der enorm erhöhte Rechenzeitaufwand steht damit in keinem
Verhältnis zur minimalen Verbesserung der Ergebnisse.
Tabelle 3.2: Variation des Modells für M a = 1 · 10−3 .
Eigenwert s−1
originale Größe, Ip = 2
−0, 193 + 93, 070i
originale Größe, Ip = 4
−0, 875 + 92, 742i
vergrößerter Ellipsoid, Ip = 2 −0, 719 + 92, 848i
Betrachtet man die Dämpfung, sieht die Situation anders aus. Tabelle 3.2 zeigt deutlich,
dass der Dämpfungsterm noch nicht konvergiert ist. Änderungen des äußeren Netzes ändern
den Realteil des Eigenwerts um über 300%. Grund hierfür liegt in den unterschiedlichen
Größenordnungen von Real- und Imaginärteil des Eigenwerts. Bei einer harmonischen Ana-
3.2 Berechnung eines strömenden Fluids
49
lyse, basierend auf einer modalen Superposition, ist der Dämpfungswert entscheidend für
die Größe der Resonanz. Für derartige Berechnungen wäre folglich eine genauere Auswertung notwendig. Ist man lediglich, wie im hier beschriebenen Beispiel, an den Eigenfrequenzen beziehungsweise den Resonanzfrequenzen interessiert, ist die Verwendung der originalen Netzgröße mit zwei Interpolationspunkten ausreichend.
4 Untersuchungen zur Intonation
Die entwickelten Berechnungsverfahren werden auf das anschauliche Beispiel einer Sopranblockflöte angewandt. Die Verwendung eines Musikinstruments als Beispielmodell bietet
den Vorteil, dass die Eigenfrequenzen dieser komplexen Struktur bekannt sind und der Einfluss der Anblasgeschwindigkeit und somit die Änderung der Strömungsgeschwindigkeit
leicht experimentell zu ermitteln ist. Der Volumenstrom innerhalb der Flöte beeinflusst die
Intonation des Instruments und ein Musiker ist somit in der Lage, eine Feinabstimmung des
Klangs zu erreichen. Welche Auswirkungen der eingebrachte Volumenstrom auf den Ton im
Vergleich zur Modalanalyse eines statischen Fluids hat, wird in diesem Kapitel diskutiert.
4.1 Besonderheiten des Berechnungsmodells
Der in das Instrument eingebrachte Luftstrom trifft auf das Labium, und es entwickelt sich
eine turbulente Strömung, die für die Tonerzeugung verantwortlich ist. Dieses turbulente
Strömungsprofil wurde numerisch an der Technischen Universität Dresden ermittelt. Dazu führte Richter [100, 101] CFD-Berechnungen an dem Fluidmodell der Blockflöte durch.
Die Ergebnisse der instationären CFD-Berechnung verschiedener Töne wurden an die Autorin übermittelt, die diese für die Verwendung der numerischen Modalanalyse aufbereitete.
Richter hatte bereits zuvor Erfahrungen auf dem Gebiet der CFD-Analyse gesammelt, vgl.
[102, 103, 104].
Die für die Berechnungen verwendete Sopranblockflöte mit deutscher Griffweise wird von
der Firma Hohner1 bereitgestellt. Abbildung 4.1 zeigt das untersuchte Instrument. Nach der
Abbildung 4.1: Die für die Modellerstellung verwendete Sopranblockflöte der Firma Hohner; www.hohner.de.
Vermessung aller relevanten Parameter wird ein FE-Modell des Fluids innerhalb und im
Nahfeld der Blockflöte erstellt, wobei der Gebietsrand einen Ellipsoid bildet.
Der FE-Bereich der Blockflöte wird mit Tetraederelementen vernetzt. An den Außenrand
des FE-Netzes schließen die infiniten Elemente an. Die Flöte selbst bildet den Innenrand
Γ. An der Technischen Universität Dresden wurden experimentelle und numerische Modalanalysen an einer Flöte sowie dem Fluid innerhalb einer Flöte durchgeführt, um den Einfluss
der Struktur auf das akustische Verhalten experimentell nachzuvollziehen [96]. Dabei wurde festgestellt, dass die Schwingungen des Flötenkörpers selbst keinen signifikanten Einfluss
1
Hohner Musikinstrumente GmbH & Co. KG, Andreas–Koch–Straße 9, 78647 Trossingen, www.hohner.de.
51
52
Untersuchungen zur Intonation
auf die Intonation hat. Folglich wird die Flöte in den hier durchgeführten Berechnungen als
schallhart angenommen.
Bei der in der vorliegenden Arbeit verwendeten Formulierung des Eigenwertproblems für
den Außenraum liegen die komplex konjugierten Eigenwerte auf Strahlen in der komplexen
Ebene, deren Anzahl von der radialen Ordnung der infiniten Elemente abhängt [13, 89]. Der
Imaginärteil entspricht dabei der Eigenfrequenz und der Realteil der Dämpfung des Modes. In diesem Modell sind die Resonatormoden der Blockflöte von Interesse, da diese den
jeweiligen Ton erzeugen. Diese Resonatormoden erkennt man daran, dass ihr Imaginärteil
signifikant größer als ihr Realteil ist. Sie repräsentieren somit nur einen sehr geringen Teil
des gesamten Eigenwertspektrums. Um diese Eigenwerte numerisch effizient zu berechnen,
wurde von der Autorin u. a. [54, 56] der in Abschnitt 3.1.1 beschriebene Eigenwert-SuchAlgorithmus entwickelt.
Abbildung 4.2 zeigt einen Ausschnitt des FE-Modells in der gröbsten Vernetzung. Man
erkennt die Vernetzung des Fluids innerhalb der Blockflöte sowie im ellipsoidförmigen Außenraum. Weiterhin lässt sich erkennen, dass in dem dargestellten Modell alle Tonlöcher
geöffnet sind.
Abbildung 4.2: Ausschnitt des FE-Modells. Gezeigt ist das Fluid innerhalb der und um die
Blockflöte für den Fall, dass alle Tonlöcher geöffnet sind.
Im Fluidmodell der Blockflöte ist jedes Tonloch individuell steuerbar und kann so geöffnet
bzw. geschlossen werden. Dadurch ist es möglich, alle spielbaren Töne des Instruments, abgesehen derer mit halbgeöffneten Tonlöchern, abzubilden. Die 14 möglichen Griffkombinationen sind in Abbildung 4.3 dargestellt. Ist der Kreis schwarz gefüllt, handelt es sich um
ein geschlossenes Tonloch, ist er weiß gefüllt, ist das Tonloch geöffnet. Das einzelne jeweils
links dargestellte Tonloch entspricht der Bohrung auf der Rückseite der Blockflöte. Die sieben untereinander dargestellten Tonlöcher rechts davon beziehen sich auf die Bohrungen
der Vorderseite, wobei sich das oberste Tonloch der Bohrung am nächsten zum Flötenkopf
befindet.
Zur Validierung der numerischen Ergebnisse wird die MIDI-Tabelle2 herangezogen. Sie
gibt die Grundfrequenzen der einzelnen Töne sowie deren internationale und deutsche Bezeichnung an. Die deutsche Bezeichnung wird auch in dieser Arbeit verwendet. Die Fre2
Die englische Abkürzung steht für musical instrument digital interface.
4.1 Besonderheiten des Berechnungsmodells
53
c00
d00
e00
f00
fis00
g00
gis00
a00
b00
h00
c000
cis000
d000
dis000
Abbildung 4.3: Griffkombinationen der einzelnen Töne. Betrachtet werden nur die Töne mit
komplett geöffneten bzw. geschlossenen Tonlöchern.
quenzen hängen von der Stimmung des Instruments ab. Die in dieser Arbeit untersuchte Sopranblockflöte ist auf a0 = 442 Hz gestimmt. Die anderen Grundfrequenzen ergeben sich aus
diesem Ton. Tabelle 4.1 zeigt die Frequenzen einzelner Töne für die Stimmung auf 442 Hz.
Dargestellt ist lediglich ein Auszug aus der MIDI-Tabelle, der etwas mehr als den untersuchten Frequenzbereich abdeckt. Die fortlaufende Nummer entspricht der allgemein gültigen
Nummerierung der Noten in der MIDI-Tabelle.
Tabelle 4.1: MIDI-Tabelle mit internationaler und deutscher Bezeichnung bei einer Stimmung auf a0 = 442 Hz.
MIDI
Hz internat. dt.
MIDI
Hz internat. dt.
90
1486, 705 Gb6
fis000
79
787, 554 G5
g00
000
89
1403, 263 F6
f
78
743, 352 Gb5
fis00
88
1324, 503 E6
e000
77
701, 631 F5
f00
000
87
1250, 165 Eb6
dis
76
662, 252 E5
e00
86
1179, 998 D6
d000
75
625, 082 Eb5
dis00
000
85
1113, 770 Db6
cis
74
590, 000 D5
d00
000
84
1051, 259 C6
c
73
556, 885 Db5
cis00
83
992, 256 B5
h00
72
525, 630 C5
c00
00
82
936, 656 Bb5
b
71
496, 128 B4
h0
81
884, 000 A5
a00
70
468, 283 Bb4
b0
00
80
834, 385 Ab5
gis
69
442, 000 A4
a0
Die in Tabelle 4.1 angegebenen Frequenzen werden im Folgenden als exakte Eigenfrequenzen bezeichnet und zum Vergleich mit den numerisch ermittelten Eigenfrequenzen genutzt.
Dazu wird der relative Fehler
resrel =
|fex − fnum |
· 100%
fex
(4.1)
ermittelt, wobei fex die exakte Eigenfrequenz und fnum die numerisch ermittelte Eigenfre-
54
Untersuchungen zur Intonation
quenz sind.
Die Berechnungen erfolgen für Luft mit einer Schallgeschwindigkeit von c0 = 343 m
s und
kg
einer Dichte von ρ0 = 1, 2 m3 .
4.2 Modalanalyse des Blockflötenmodells ohne Strömung
In diesem Abschnitt wird die Blockflöte ohne Berücksichtigung der Strömung untersucht.
Zunächst werden die 14 spielbaren Töne, dargestellt in Abbildung 4.3, berechnet und mit
den Werten aus der MIDI-Tabelle verglichen. Dazu werden grobe FE-Netze genutzt. Die daran angeschlossenen infiniten Elemente besitzen lediglich einen Interpolationspunkt. Tabelle
4.2 zeigt die numerisch ermittelten Eigenwerte sowie deren Abweichung von den exakten
Eigenfrequenzen. Der Imaginärteil der Eigenwerte entspricht der Eigenfrequenz und der
Realteil der zugehörigen Dämpfung. Für die Berechnung des relativen Fehlers wird daher
lediglich der Imaginärteil des Eigenwerts herangezogen. Diese berechneten Eigenwerte entsprechen den Grundtönen der jeweiligen Griffkombinationen.
Tabelle 4.2: Vergleich der numerisch ermittelten
Eigenfrequenzen.
Note
fnum s−1
c00
−0, 128 + 531, 477i
d00
−0, 167 + 597, 614i
e00
−0, 217 + 668, 620i
00
f
−0, 253 + 711, 565i
fis00
−0, 327 + 760, 947i
00
g
−0, 338 + 797, 113i
gis00
−0, 459 + 872, 518i
a00
−0, 470 + 902, 333i
00
b
−0, 610 + 951, 115i
h00
−0, 654 + 1014, 560i
c000
−0, 827 + 1077, 628i
cis000 −0, 905 + 1129, 043i
d000
−0, 996 + 1206, 886i
000
dis
−0, 549 + 1258, 475i
Eigenwerte der 14 Töne mit den exakten
fex s−1
525, 630
590, 000
662, 252
701, 631
743, 352
787, 554
834, 385
884, 000
936, 656
992, 256
1051, 259
1113, 770
1179, 998
1250, 165
resrel [%]
1, 112
1, 291
0, 962
1, 413
2, 367
1, 214
4, 570
2, 074
1, 554
2, 248
2, 508
1, 371
2, 279
0, 665
Der relative Fehler der einzelnen Töne ist gering und liegt jeweils unter 5%. Lässt man den
Ton gis00 außer Acht, liegt die Abweichung sogar unter 2, 6%. Diese aus Ingenieurssicht sehr
guten Ergebnisse sind jedoch für einen Musiker zu ungenau. Abweichungen um wenige
Herz werden bereits gehört und führen zu melodischen Dissonanzen im Zusammenspiel.
Es werden zwei Töne für Konvergenzuntersuchungen ausgewählt. Dabei handelt es sich
um c00 , bei dem alle Tonlöcher geschlossen sind, sowie d000 , mit nur einem geschlossenen
Tonloch. Die Griffkombinationen der beiden Töne unterscheiden sich deutlich voneinander.
Zusätzlich zu den Grundtönen lassen sich auch die Obertöne berechnen. Diese werden auch
als Harmonische bezeichnet. Abbildung 4.4 zeigt den Grundton sowie den ersten Oberton
der Note c00 . Abbildung 4.5 zeigt den Grundton und den ersten Oberton der Note d000 . Die Eigenvektoren sind logarithmisch skaliert. Dies bietet den Vorteil, dass das Abstrahlverhalten
4.2 Modalanalyse des Blockflötenmodells ohne Strömung
55
in den Außenraum besser zu erkennen ist.
-40.921
-32.484
-24.047
-15.61
-7.173
1.264
9.701
18.138
26.575
35.012
-54.957
-42.819
-30.681
-18.543
-6.405
5.732
17.87
30.008
42.146
54.284
Abbildung 4.4: Eigenvektor der Note c00 für den Grundton (oben) und die erste Harmonische
(unten). Die angegebene Skala ist in dB.
-34.949
-25.811
-16.672
-7.533
1.605
10.744
19.883
29.021
38.16
47.299
-44.311
-35.868
-27.425
-18.982
-10.538
-2.095
6.348
14.791
23.234
31.678
Abbildung 4.5: Eigenvektor der Note d000 für den Grundton (oben) und die erste Harmonische (unten). Die angegebene Skala ist in dB.
Für die beiden gewählten Töne erfolgt eine Konvergenzuntersuchung. Dabei werden zwei
verschiedene Varianten betrachtet.
Die als exakt bezeichneten Eigenfrequenzen aus Tabelle 4.1 entsprechen nicht zwangsläufig den exakten Eigenfrequenzen des hier untersuchten Modells. Das muss in den Untersuchungen berücksichtigt werden. Diese Problematik wird im Anschluss an die beiden
Varianten genauer diskutiert.
a) Konvergenz der Eigenwerte bei steigendem Polynomgrad der infiniten Elemente
Tabelle 4.3 präsentiert die zugehörigen Ergebnisse sowie die relativen Fehler in Bezug
auf die exakte Eigenfrequenz. Für beide Noten wird das grobe Netz mit einem, drei
bzw. fünf Interpolationspunkten verwendet.
Aus der Tabelle folgt für die Eigenwerte mit steigender Anzahl der Interpolationspunkte Konvergenz zum exakten Wert hin. Die Konvergenzrate ist jedoch sehr gering und es
ist erkennbar, dass die exakten Eigenfrequenzen auf diesem Weg nicht erreicht werden.
Bei den Flötentönen handelt es sich um innere Eigenwerte, diese hängen maßgeblich
56
Untersuchungen zur Intonation
Tabelle 4.3: Konvergenzverhalten bezüglich der Anzahl der Interpolationspunkte der IE.
Ip
c00 s−1
resrel [%]
d000 s−1
resrel [%]
1
−0, 128 + 531, 477i
1, 112
−0, 996 + 1206, 886i
2, 279
3
−0, 129 + 531, 397i
1, 097
−1, 255 + 1206, 857i
2, 276
5
−0, 410 + 531, 134i
1, 047
−1, 554 + 1206, 856i
2, 276
exakt
525, 630
1179, 998
vom Bereich der finiten Elemente ab und werden kaum von den infiniten Elementen
beeinflusst.
b) Konvergenz des Eigenwerts bei einer Verfeinerung des Netzes mit einer konstanten
Anzahl an Interpolationspunkten
Für die Umsetzung dieser Variante werden die beiden groben Netze stufenweise verfeinert, so dass sich acht Netze mit verschiedenem Freiheitsgrad bei je einem Interpolationspunkt ergeben.
Tabelle 4.4 zeigt die numerischen Ergebnisse der beiden Töne c00 und d000 in Abhängigkeit vom Freiheitsgrad im Vergleich zur exakten Frequenz. Die grafische Darstellung
der Ergebnisse erfolgt in Abbildung 4.6. Sie zeigt die Frequenz aufgetragen über dem
Freiheitsgrad.
Wirft man einen genaueren Blick auf die numerischen Ergebnisse, lässt sich eine Konvergenz bei beiden Tönen erkennen. Für den Ton c00 liegt die Differenz zwischen dem
gröbsten und dem feinsten Netz nur bei ca. 1 Hz, während die Differenz für den Ton
d000 ca. 7 Hz beträgt. Andererseits liegt der relative Fehler des gröbsten Netzes von c00
bereits unterhalb des relativen Fehlers des feinsten Netzes von d000 . Die grafische Darstellung des Konvergenzverhaltens zeigt qualitativ einen identischen Verlauf für beide
Töne.
Tabelle 4.4: Konvergenzverhalten in Abhängigkeit vom Freiheitsgrad FG für Ip = 1.
FG
c00 s−1
resrel [%]
FG
d000 s−1
resrel [%]
45951 −0, 128 + 531, 477i
1, 112
49062 −0, 996 + 1206, 886i
2, 279
48633 −0, 127 + 531, 390i
1, 096
51520 −0, 994 + 1206, 801i
2, 271
59558 −0, 127 + 531, 337i
1, 086
62527 −0, 994 + 1206, 437i
2, 241
79033 −0, 127 + 530, 898i
1, 002
88005 −0, 987 + 1202, 890i
1, 940
118355 −0, 127 + 530, 811i
0, 986
127327 −0, 989 + 1202, 582i
1, 914
212047 −0, 127 + 530, 511i
0, 929
278275 −0, 984 + 1199, 968i
1, 692
270999 −0, 127 + 530, 465i
0, 920
337227 −0, 985 + 1199, 892i
1, 686
331871 −0, 127 + 530, 446i
0, 916
397497 −0, 985 + 1199, 845i
1, 682
exakt
525, 630
exakt
1179, 998
Die Konvergenzuntersuchungen zeigen selbst bei sehr feinen Netzen eine Abweichung
zur exakten Frequenz von über 5 Hz. Die Kombination aus einem feinen Netz und einer hohen Anzahl an Interpolationspunkten erzielt vermutlich noch etwas genauere Ergebnisse.
4.3 Modalanalyse des Blockflötenmodells mit Strömung
f
57
f
531, 4
c00
531, 0
1205
d000
1203
530, 6
1201
530, 2
1199
1, 5
2, 5
3, 5
0
1
2
3
4
·105
·105
FG
FG
Abbildung 4.6: Numerisch ermittelte Frequenzen in Abhängigkeit vom Freiheitsgrad.
0
0, 5
Ein deutlich besseres Ergebnis als hier gezeigt ist aber nicht zu vermuten. Eine Fehlerquelle liegt möglicherweise in einer nicht ganz exakten Abbildung der Blockflöte. Schon eine
geringe Abweichung um wenige Millimeter zwischen Modell und realem Instrument kann
zu unterschiedlichen Eigenfrequenzen führen. Ein weiterer Grund für Abweichungen liegt
vermutlich in der Vernachlässigung der Strömung innerhalb des Instruments. So nutzt ein
Musiker die Variation des Anblasdrucks als Mittel zur Feinabstimmung des Klangs. Dieser
Einfluss wird im folgenden Abschnitt untersucht.
4.3 Modalanalyse des Blockflötenmodells mit Strömung
Die Untersuchungen der Blockflöte ohne Strömung zeigen eine Lage der berechneten Eigenfrequenzen oberhalb der exakten Eigenfrequenzen. Daher wird vermutet, dass das Vorhandensein einer Strömung die Eigenfrequenzen senkt. Beim Spielen einer Flöte steigen aber mit
stärkerem Anblasdruck die Resonanzfrequenzen an, was beim Musizieren leicht auszuprobieren ist. Diese Beobachtung steht im Gegensatz zu dem Absinken der Frequenz bei einer
konstanten Strömung, wie in Abschnitt 2.4.2 beschrieben ist. Diese Effekte werden nur für
die Töne c00 und d000 untersucht.
Richter bereitete für beide Töne die kompressiblen Navier-Stokes-Berechnungen mit einer
CFD-Software auf. Der in das Instrument eingebrachte Luftstrom trifft auf das Labium, an
dem eine turbulente Strömung entsteht, die für die Tonerzeugung verantwortlich ist. Als
Ergebnis der Berechnung stand das Strömungsprofil für 50 Zeitschritte über einer Periode.
Die Autorin bildet den Mittelwert über alle Zeitschritte der Daten und interpoliert diese auf
das jeweils verwendete FE-Netz. Die Strömung ist vor Erreichen des Randes ΓC und somit
noch innerhalb des Bereichs der finiten Elemente abgeklungen. Daher ist es nicht notwendig
im Bereich der infiniten Elemente eine Strömung zu berücksichtigen. Abbildung 4.7 zeigt die
interpolierte Strömung v 0 in Flötenlängsrichtung für den Ton c00 und Abbildung 4.8 zeigt sie
für den Ton d000 .
Im Vergleich beider Abbildungen lässt sich deutlich ein schnelleres Abklingverhalten des
Tons d000 als im Fall von c00 erkennen. Die Ursache hierfür findet sich in den geöffneten
Tonlöchern.
In einem ersten Schritt wird das Programm E VAL S A G E genutzt, um den Grundton, d.
58
Untersuchungen zur Intonation
-1.935
2.086
.075731
6.107
4.097
10.128
8.118
14.149
12.139
16.16
Abbildung 4.7: Strömung in Flötenlängsrichtung v0z [ m
s ], interpoliert auf das FE-Netz für
den Ton c00 .
-1.821
2.24
.209483
6.3
4.27
10.361
8.331
14.422
12.391
16.742
Abbildung 4.8: Strömung in Flötenlängsrichtung v0z [ m
s ], interpoliert auf das FE-Netz für
000
den Ton d .
h. die erste Eigenfrequenz, des jeweiligen Tons mithilfe der Galbrun-Gleichung im Fall eines ruhenden Fluids zu ermitteln. Anschließend erfolgt die Berechnung des Grundtons unter Berücksichtigung des entsprechenden charakteristischen Strömungsprofils. Tabelle 4.5
zeigt die Gegenüberstellung der Eigenfrequenzen im Fall eines statischen Fluids und unter
Berücksichtigung der CFD-Daten. In der Tabelle sind sowohl die Ergebnisse der Note c00 als
auch der Note d000 dargestellt.
Tabelle 4.5: Eigenwerte der beiden untersuchten Töne, jeweils für den Fall des statischen sowie des strömenden Fluids.
c00 s−1
d000 s−1
ohne Strömung −0, 234 + 536, 165i −1, 719 + 1230, 018i
mit Strömung
−0, 225 + 519, 129i −1, 704 + 1221, 322i
exakt
525, 630
1179, 998
Wie bereits im Rahmen der Validierung festgestellt, liefert die Helmholtz-Lösung bessere
Ergebnisse als die Galbrun-Lösung. Auch bei Verwendung der Galbrun-Gleichung werden,
wie im zuvor betrachteten Abschnitt, genauere Ergebnisse für den Ton c00 als für den Ton
d000 erzielt. In Tabelle 4.6 sind die Ergebnisse der Galbrun-Gleichung sowohl für den stationären als auch für den Fall mit Strömung sowie die Helmholtz-Lösung den exakten Eigenfrequenzen gegenübergestellt. Für die Berechnung mit der Galbrun-Gleichung und mit der
4.3 Modalanalyse des Blockflötenmodells mit Strömung
59
Helmholtz-Gleichung wird das gleiche finite und infinite Elemente Modell verwendet.
Tabelle 4.6: Gegenüberstellung der Lösungen von Galbrun- und Helmholtz-Gleichung im
Vergleich zur exakten Eigenfrequenz.
c00 s−1
resrel [%]
d000 s−1
resrel [%]
Galb. ohne Strömung −0, 234 + 536, 165i
2, 004
−1, 719 + 1230, 018i
4, 239
Galb. mit Strömung
−0, 225 + 519, 129i
1, 237
−1, 704 + 1221, 322i
3, 502
Helmholtz
−0, 128 + 531, 477i
1, 112
−0, 996 + 1206, 886i
2, 279
exakt
525, 630
1179, 998
Bei der Verwendung der Helmholtz-Gleichung werden genauere Ergebnisse erzielt, wie
der Tabelle zu entnehmen ist. Auffällig ist in den Tabellen 4.5 und 4.6, dass die Eigenfrequenz des Tons c00 bei Berücksichtigung der CFD-Daten unter der exakten Eigenfrequenz
liegt. Dieser Effekt ist sehr überraschend und weist auf einen starken Einfluss der Strömung
bei diesem Ton hin. Zusätzlich ist der Betrag des relativen Fehlers in diesem Fall nur minimal
größer als im Fall der Helmholtz-Gleichung.
Weiterhin ist in den Tabellen der eingangs erwartete Effekt einer steigenden Eigenfrequenz bei Vorhandensein einer rotationsbehafteten Strömung im Vergleich zum statischen
Fluid nicht nachweisbar. Vielmehr ist eine deutliche Konvergenz zur exakten Eigenfrequenz
bei beiden Tönen zu beobachten. Grund hierfür ist vermutlich, dass die Eigenfrequenz des
ruhenden Fluids nicht exakt mit der Resonanzfrequenz des strömenden Mediums übereinstimmt. Ob der in der Realität beobachtete Effekt mithilfe der Galbrun-Gleichung numerisch
nachweisbar ist, muss daher mit zusätzlichen Berechnungen überprüft werden.
Der Flötenton wird durch das Auftreffen auf und die daraus folgende Wirbelbildung am
Labium erzeugt. Um einen linearen Anstieg der Strömung im gesamten Modell zu vermeiden, wird lediglich ein kleiner, ellipsoidförmiger Bereich um das Labium herausgegriffen.
Ein linearer Anstieg hätte, ähnlich wie bei den zuvor betrachteten Rohrbeispielen ein absinken der Resonanzfrequenzen zur Folge. Über diesen ausgewählten Bereich wird die Funktion einer Glockenkurve gelegt, um einen Faktor zu erhalten, mit dem die Geschwindigkeit
v 0 innerhalb dieses Bereichs multipliziert wird. Im Zentrum des Ellipsoids hat die Funktion
ein Maximum und fällt am Außenrand auf den Wert Eins. Somit wird ein kontinuierlicher
Übergang an der Gebietsgrenze ermöglicht. Multipliziert man nun die Geschwindigkeit mit
dem ermittelten Faktor, hat dies eine Geschwindigkeitserhöhung im Bereich des tonbildenden Mechanismus zur Folge. Tabelle 4.7 vergleicht die mittels der originalen CFD-Daten berechneten Resonanzfrequenzen, mit denen, die unter Verwendung des Verstärkungsfaktors
erhalten werden. Im Fall der doppelten Verstärkung wird neben dem eingangs gewählten
Ellipsoidradius ein weiterer Radius getestet, um den Einfluss der Gebietsgröße zu untersuchen.
Die in Tabelle 4.7 dargestellten Berechnungsergebnisse zeigen den zuvor beschriebenen Effekt der Resonanzfrequenzerhöhung. Die Auswirkung des veränderten Strömungsprofils ist
jedoch minimal. Möglicherweise ist der Einfluss besser beschreibbar, wenn ein noch größerer
Bereich ausgewählt wird bzw. die Strömungsgeschwindigkeit stärker erhöht oder gesenkt
wird.
Zusätzlich bemerkt man, dass sich eine Änderung des Strömungsprofils etwas stärker
auf den Ton c00 als auf den Ton d000 auswirkt. Die Autorin vermutet, dass dies an den unterschiedlichen Griffkombinationen liegt. Während bei c00 alle Tonlöcher geschlossen sind,
60
Untersuchungen zur Intonation
Tabelle 4.7: Eigenwerte der beiden Töne. Gegenüberstellung der Ergebnisse unter Verwendung der originalen CFD-Daten und der lokal erhöhten Geschwindigkeitswerte.
c00 s−1
d000 s−1
originale CFD-Daten
−0, 225 + 519, 129i −1, 704 + 1221, 322i
erhöhtes v 0 , Faktor 2
−0, 228 + 519, 443i −1, 705 + 1221, 396i
erhöhtes v 0 , Faktor 3
−0, 226 + 519, 558i −1, 705 + 1221, 476i
erhöhtes v 0 , Faktor 2, Bereich größer −0, 231 + 519, 646i −1, 706 + 1221, 680i
ist bei d000 lediglich eins geschlossen. Aufgrund der sieben geöffneten Tonlöcher klingt die
Strömung innerhalb des Instruments schneller ab und folglich betrifft dies auch den Einfluss
des Strömungsprofils auf die Resonanzfrequenz. Die Wirkung beschränkt sich daher lediglich auf einen kleinen Bereich nahe dem Flötenkopf. Die Ergebnisse in Tabelle 4.7 machen
die Notwendigkeit weiterführender Untersuchungen deutlich. Es ist denkbar, dass in der
Realität weitere Effekte bei der Tonerzeugung und -variation eine Rolle spielen als an dieser
Stelle betrachtet werden.
Anhand dieser Ergebnisse lässt sich der entscheidende Vorteil der Galbrun-Gleichung gegenüber der Helmholtz-Gleichung erkennen, denn mit der Helmholtz-Gleichung wären derartige Untersuchungen gar nicht erst möglich.
Die auftretenden Scheinmoden werden in diesem Kapitel nicht genauer betrachtet. Nichtsdestoweniger spielen sie bei den hier durchgeführten Berechnungen eine wesentliche Rolle.
Die Scheinmoden sind, genauso wie die physikalischen Moden, komplexe Größen. In der
unmittelbaren Umgebung eines einzelnen Eigenwerts befindet sich eine große Anzahl dieser Moden ohne physikalische Bedeutung. Die Problematik hierbei ist die Notwendigkeit
eines präzise gesetzten Shifts, um den gesuchten Eigenwert zu treffen. Andernfalls werden
ausschließlich Scheinmoden berechnet. Die grafische Betrachtung der zugehörigen Eigenvektoren ist folglich unentbehrlich für eine zuverlässige Aussage über die Art des Modes.
Dies wird in der vorliegenden Arbeit berücksichtigt und führt dazu, dass die Modalanalyse
mit mehreren Shifts durchgeführt werden muss, bis der jeweilige Eigenwert gefunden ist.
Ist der richtige Shift des jeweiligen Tons jedoch einmal gefunden, ist er für alle in diesem
Abschnitt beschriebenen Berechnungen verwendbar.
5 Zusammenfassung
In der vorliegenden Arbeit wurde ein Programmcode zur numerischen Modalanalyse eines dreidimensionalen Fluids innerhalb einer und um eine Blockflöte entwickelt. Mit diesem Code war es möglich, turbulente Strömungen im Inneren und im Nahfeld des Instruments im Rahmen der Modalanalyse zu berücksichtigen. Hierzu wurde ein realistisches
Strömungsprofil, ermittelt mithilfe eines Navier-Stokes-Lösers, verwendet.
Der Hauptteil der Arbeit befasste sich mit der Herleitung der für die Berechnungen notwendigen Galbrun-Gleichung und deren Aufbereitung zur numerischen Analyse. Für die
numerische Umsetzung kam die Methode der finiten Elemente in Verbindung mit komplex
konjugierten, infiniten Astley-Leis Elementen zur Anwendung. Die infiniten Elemente wurden genutzt, um in den betrachteten Außenraumproblemen die Abstrahlung in das Fernfeld abzubilden. An geeigneten Stellen in der Herleitung der Galbrun-Gleichung erfolgte
die Herstellung des Bezugs zur Wellengleichung bzw. im weiteren Verlauf zur HelmholtzGleichung.
Die Autorin validierte zunächst den von ihr entwickelten Programmcode E VAL S A G E anhand von zwei einfachen Beispielen. Zum Einen wurde die Helmholtz-Gleichung verwendet, um am Modell einer Vollkugel die Abstrahlung in den Außenraum zu untersuchen. Bei
der durchgeführten Modalanalyse erfolgte die Darstellung der Eigenwerte sowie der zugehörigen Eigenvektoren der verschiedenen Multipole. Die Ergebnisse entsprachen den Erwartungen und konnten durch den Vergleich mit anderen Publikationen verifiziert werden.
Im zweiten Validierungsbeispiel fiel die Wahl auf ein Rohr, durch welches eine konstante
Strömung fließt. Die Rohrwände wurden als schallhart angesehen. Vorteil dieses Modells
war die Möglichkeit die Frequenzen in Abhängigkeit von der Machzahl analytisch zu bestimmen. Die analytische Lösung zeigte ein Absinken der Eigenfrequenzen bei steigender
Machzahl. Der Vergleich der mittels der Galbrun-Gleichung numerisch ermittelten Eigenfrequenzen mit den analytischen Ergebnissen zeigte eine gute Übereinstimmung und deutete somit auf die korrekte numerische Umsetzung der zuvor hergeleiteten Formulierung
hin. Eine Gegenüberstellung der Galbrun-Lösung mit der Helmholtz-Lösung im Fall eines
ruhenden Fluids zeigte jedoch, dass die rein druckbasierte Helmholtz-Gleichung genauere
Ergebnisse als die druck- und verschiebungsbasierte Galbrun-Gleichung unter Verwendung
der selben Vernetzung des Modells liefert. Aufgrund dessen war bei der Verwendung der in
dieser Arbeit genutzten Formulierung der Galbrun-Gleichung generell eine größere Ungenauigkeit zu erwarten.
An die Validierung des entwickelten Programmcodes schloss sich seine Anwendung auf
kleinere Modelle an. Da das Hauptaugenmerk der vorliegenden Arbeit auf der Berechnung
der Resonatormoden in Außenraumproblemen lag, wurde ein Eigenwert-Such-Algorithmus
entwickelt, mit welchem einzelne Eigenwerte gezielt berechenbar sind. Dieser Algorithmus
ermöglichte die Konzentration auf die Berechnung der Resonatormoden, ohne die in deutlich größerer Zahl auftretenden Außenraummoden ebenfalls berechnen zu müssen. Hierbei
nutzte die Autorin die Tatsache einer signifikant schwächeren Dämpfung der Resonatormoden im Vergleich zu den Außenraummoden aus. Dieser Eigenwert-Such-Algorithmus wurde
ausführlich getestet und ermöglichte eine enorme Zeitersparnis gegenüber einer konventio-
61
62
Zusammenfassung
nellen Modalanalyse.
An die Entwicklung und Anwendung des Eigenwert-Such-Algorithmus fügte sich ein Beispiel zur Verwendung der Galbrun-Gleichung bei konstanter Strömung an. Besonderheit
dieses Beispiels war das Vorhandensein der Strömung im gesamten Berechnungsgebiet, d.
h. sowohl im Bereich der finiten als auch im Bereich der infiniten Elemente. Als Modell kam
ein gerades dünnwandiges Rohr zur Anwendung, welches an beiden Enden geöffnet ist.
Die Strömungsrichtung des Fluids lag parallel zur Längsachse des Rohrs und die Strömung
war sowohl innerhalb als auch außerhalb des Rohrs vorhanden. Die Durchführung dieser
Berechnungen machte die Erweiterung der Formulierung der infiniten Elemente um die
Strömungsterme notwendig. Dies lieferte eine deutlich komplexere Formulierung als für den
Fall einer bereits vor Erreichen der infiniten Elemente abgeklungenen Strömung. In diesem
Beispiel wurde die Geschwindigkeit der konstanten Strömung kontinuierlich von null bis zu
einer Machzahl von 0,1 erhöht. Wie erwartet sanken die Eigenwerte bei steigender Machzahl.
Nach der Anwendung des entwickelten Programmcodes E VAL S A G E auf kleinere Modelle
fanden Untersuchungen zur Intonation einer Blockflöte statt. Hierfür wurde eine Sopranblockflöte mit deutscher Griffweise, bereitgestellt von der Firma Hohner, genutzt. Nach der
Vermessung aller relevanten Parameter dieser Blockflöte erfolgte die Erstellung eines finite Elemente Modells. Für die im Anschluss durchgeführten Berechnungen wurde nicht das
Modell der Flöte selbst, sondern deren Negativ, d. h. das FE-Modell des Fluids innerhalb und
im Nahfeld des Instruments, verwendet. Die Flöte selbst stellte in diesem Modell den Rand
des Berechnungsgebiets dar. In einem ersten Schritt erfolgte die Berechnung der einzelnen
Eigenfrequenzen aller spielbaren Töne der Sopranblockflöte, ausgenommen derer mit halbgeöffneten Tonlöchern. Es blieben somit 14 Griffkombinationen zur Tonerzeugung übrig.
Die Eigenfrequenzen dieser 14 Töne wurden für den Fall eines statischen Fluids mithilfe der
Helmholtz-Gleichung ermittelt und mit den Werten aus der MIDI-Tabelle verglichen. Die
MIDI-Tabelle lieferte hierbei die exakten Werte. Obwohl die Berechnungen am ruhenden
Fluid erfolgten, wurden bereits sehr gute Übereinstimmungen erreicht. Der relative Fehler
der numerisch ermittelten Eigenfrequenzen lag stets unter 4, 6%. Lies man den Ton gis00 außer Acht, lag die maximale Abweichung sogar noch unter 2, 6%. Diese, aus Sicht eines Ingenieurs, sehr guten Ergebnisse sind jedoch für einen Musiker zu ungenau. Daher wurden
weiterführende Berechnungen durchgeführt.
An diese Untersuchungen anschließend fiel die Wahl auf zwei Töne mit sehr unterschiedlicher Griffkombination, c00 und d000 , um an ihnen Konvergenzuntersuchungen durchzuführen.
Hierbei untersuchte die Autorin das Konvergenzverhalten hinsichtlich der Änderung zweier Parameter. Zunächst erfolgte die Erhöhung des Polynomgrads der infiniten Elemente. Die
Steigerung des Polynomgrads und somit der Anzahl der Interpolationspunkte hatte genauere Ergebnisse zur Folge. Jedoch stand diese Konvergenz in keinem Verhältnis zur daraus
resultierenden Verlängerung der Rechenzeit. Das lag darin begründet, dass es sich bei den
Flötentönen um Resonatormoden handelte, die in erster Linie von den finiten Elementen im
Innenraum des Instruments abhingen, während die infiniten Elemente nur einen minimalen
Einfluss auf sie hatten. Daher wurde der Polynomgrad zurück auf Eins gesetzt und ein anderer Parameter variiert. Dabei handelte es sich um den Freiheitsgrad der finiten Elemente. Das
bedeutete eine schrittweise Verfeinerung des FE-Netztes, während der Polynomgrad der infiniten Elemente dabei jedoch konstant blieb. Auch in diesem Fall war eine Konvergenz der
Eigenfrequenzen nachweisbar. Die Ergebnisse der Konvergenzuntersuchungen legten die
Vermutung nahe, dass die Kombination aus einem höheren Polynomgrad und einem feinen
Netz die besten Ergebnisse für ein statisches Fluid erzielt.
Im Anschluss an die statischen Berechnungen erfolgte bei der Modalanalyse die Berück-
63
sichtigung des für das Musikinstrument typischen Strömungsprofils. Hierfür kam die Galbrun-Gleichung zur Anwendung. Der Grund für diese Erweiterung des Berechnungsmodells lag in der Einbringung eines Luftstroms in das Instrument durch den Musiker beim
Spielen der Blockflöte. Dieser Luftstrom regt die Luftsäule im Inneren zu Schwingungen an.
Er trifft auf das Labium und dort bildet sich eine turbulente Strömung aus. Dieser Mechanismus ist wesentlicher Bestandteil der Tonerzeugung und daher erachtete die Autorin dessen
Berücksichtigung in den Untersuchungen als erforderlich. Weiterhin war beim Spielen einer
Blockflöte eine Erhöhung des Tons bei größerem Anblasdruck zu beobachten. Dies widersprach auf den ersten Blick der Theorie zur Galbrun-Gleichung bei rohrähnlichen Modellen,
denn sowohl analytisch als auch numerisch wies die Autorin ein Absinken der Eigenfrequenzen bei steigender Strömungsgeschwindigkeit nach. Hierbei muss jedoch beachtet werden, dass bis zu diesem Punkt ausschließlich konstante Strömungen untersucht wurden.
Daraus resultierte die Vermutung des Auftretens einer sich genau umgekehrt verhaltenden
Beziehung bei rotationsbehafteten Strömungen. Die Überprüfung dieses Effekts geschah anhand der beiden bereits zuvor genauer untersuchten Töne. In einem ersten Schritt erfolgte
die Modalanalyse des Fluidmodells mittels der Galbrun-Gleichung für ein statisches Fluid.
Anschließend wurde das charakteristische Strömungsprofil der zwei Töne ermittelt und in
den Berechnungen berücksichtigt. Zunächst zeigte sich der erwartete Effekt einer Erhöhung
der Eigenfrequenz bei vorhandener Strömung nicht. Stattdessen, sanken sie deutlich ab.
Vor allem für c00 war dieser Effekt beträchtlich. Die Eigenfrequenz fiel sogar unter den als
exakt angenommenen Wert. Der Absolutwert der Abweichung lag somit in der gleichen
Größenordnung wie bei der Helmholtz-Gleichung.
Ursächlich für das im Gegensatz zu den Erwartungen auftretende Verhalten war das nicht
exakte Übereinstimmen der Eigenfrequenz des Fluids im stationären Fall mit der Resonanzfrequenz des strömenden Fluids. Daraus resultierte eine ausführlichere Untersuchung des
Einflusses der Strömung auf die Resonanzfrequenzen. Grundlage für diese Untersuchung
bildete die Kenntnis, dass der wesentliche Teil der Tonerzeugung direkt am Labium stattfindet. Die Autorin griff einen kleinen, ellipsoidförmigen Bereich um das Labium heraus, über
den sie die dreidimensionale Funktion einer Glockenkurve legte. Mithilfe dieser Funktion
wurde ein Wichtungsfaktor ermittelt, mit dem die Strömungsgeschwindigkeiten innerhalb
des Gebiets multipliziert wurden. Im Zentrum des Bereichs erreichte der Faktor ein Maximum und sank am Gebietsrand auf den Wert Eins, um einen kontinuierlichen Übergang
zu ermöglichen. Bei den durchgeführten Untersuchen wurde sowohl der Extremwert des
Faktors als auch der Außenradius des Ellipsoids variiert. Durch die Vergrößerung des Radius bzw. durch die Verstärkung der Strömungsgeschwindigkeit stieg die Resonanzfrequenz
leicht an und somit wurde der in der Realität wahrnehmbare Effekt zumindest in geringem Maße beschrieben. Dieser Effekt war vor allem bei dem Ton d000 minimal. Da bei diesem Ton jedoch bis auf ein Tonloch alle geöffnet sind, klang der Einfluss der Strömung wesentlich schneller ab als bei dem Ton c00 mit ausschließlich geschlossenen Tonlöchern. Daher
beschränkte sich die Auswirkung der lokal geänderten Strömungsgeschwindigkeiten ebenfalls auf einen kleineren Bereich und beeinflusste die Resonanzfrequenz in einem geringeren
Ausmaß. Ob weitere Effekte die Tonerzeugung beeinflussen, war bis zu diesem Punkt nicht
abschließend klärbar.
Zusätzlich zu den Untersuchungen des Einflusses der rotationsbehafteten Strömung auf
den Klang der Sopranblockflöte wurden für den stationären Fall die Ergebnisse der GalbrunGleichung mit denen der Helmholtz-Gleichung verglichen. Die mithilfe der Helmholtz-Gleichung numerisch ermittelten Eigenfrequenzen waren im Ergebnis signifikant genauer als die
mithilfe der Galbrun-Gleichung erhaltenen. Auch der Vergleich zwischen der Helmholtz-
64
Zusammenfassung
Lösung und der Galbrun-Lösung unter Verwendung der CFD-Daten zeigte ein ähnliches
Ergebnis, jedoch waren die Unterschiede nicht so deutlich ausgeprägt. Dieser Effekt wurde
bereits bei den vorherigen Beispielen beobachtet und war somit nicht überraschend, deutete aber auf einen noch anstehenden Optimierungsbedarf bei dem Gebrauch der GalbrunGleichung hin.
Bei den durchgeführten Untersuchungen zur Intonation musste außerdem die Möglichkeit der Verwendung eines nicht exakt abgebildeten Modells berücksichtigt werden. Bereits
kleine Unterschiede zwischen der realen Sopranblockflöte und dem von ihr abgeleiteten finite Elemente Modell führen auf hörbare Frequenzabweichungen. Derartige Abweichungen
entstanden möglicherweise durch kleine Messungenauigkeiten bei der Modellbildung und
ließen sich weder vollständig vermeiden noch genau nachprüfen.
Zusammenfassend wurde deutlich, dass das entwickelte Berechnungsverfahren sowie die
Anwendung desselben auf Außenraumprobleme eine gute Möglichkeit bot, Strömungen in
Frequenzbereichsberechnungen zu berücksichtigen. Mithilfe der komplex konjugierten, infiniten Astley-Leis Elemente wurde die Abstrahlung in das Fernfeld beachtet. Der auf komplexe Matrizen angepasste iterative Arnoldi-Algorithmus in Kombination mit dem entwickelten Eigenwert-Such-Algorithmus erlaubte die gezielte Berechnung einzelner Eigenwerte. Dies hatte eine signifikante Rechenzeitersparnis zur Folge und machte bei großen Modellen die Lösung des Eigenwertproblems überhaupt erst möglich.
Die Galbrun-Gleichung wurde bereits von anderen Autoren untersucht und auf akustische Problemstellungen angewendet. Im Rahmen dieser Arbeit erfolgte jedoch erstmalig die
Anwendung der Galbrun-Gleichung auf Eigenwertprobleme. Zumindest fand die Autorin
keinerlei Literatur zu dieser Problematik. Möglicherweise liegt dies an der Schwierigkeit
der Behandlung der Scheinmoden und insbesondere an der Unterscheidung zwischen den
physikalischen Moden und den Störmoden. Darüber hinaus sind der Autorin auch keine
Arbeiten bekannt, die sich mit dreidimensionalen Modellen befassen. Die erfasste Literatur
beschränkt sich auf ein- und zweidimensionale Beispiele. In der vorliegenden Arbeit wurden somit erstmals komplexe dreidimensionale Modelle unter Anwendung der GalbrunGleichung untersucht.
Ausblick
Die Autorin erachtet es als sinnvoll, den entstandenen Programmcode E VAL S A G E weiter
zu entwickeln. Vor allem die Problematik der Scheinmoden erfordert weitergehende Untersuchungen. Es muss eine Möglichkeit gefunden werden, diese bei den Berechnungen außer Acht zu lassen. Da die Scheinmoden aus der numerischen Formulierung resultieren,
wäre es denkbar ein neues Element zu entwickeln, welches keine Scheinmoden verursacht
bzw. nur Störmoden außerhalb des Bereichs der physikalischen Moden aufweist. Dazu sind
ausführliche Studien notwendig, da ein Element gefunden werden muss, welches die inf-sup
Bedingung nicht nur im ruhenden sondern auch im strömenden Fluid erfüllt.
Weiterhin ist eine Optimierung der Transformation der Zustandsraummatrizen vom linearen in das Standardeigenwertproblem zu untersuchen. Im entwickelten Programmcode
wird ein vorkonditionierter GMRes-Algorithmus genutzt. Für die Helmholtz-Gleichung ist
diese Umformung innerhalb weniger Iterationsschritte erreicht. Im Gegensatz dazu steht
die Galbrun-Gleichung mit ihren schlecht konditionierten Matrizen. Im stationären Fall entfallen einzelne Untermatrizen und die Zustandsraumformulierung enthält singuläre Matrizen. Selbst bei Vorhandensein einer Strömung ist diese im Normalfall deutlich geringer als
65
die Schallgeschwindigkeit, wodurch eine schlechte Konditionierung der Matrizen bestehen
bleibt. Dies beeinflusst die Konvergenz des GMRes-Algorithmus enorm und hat längere Rechenzeiten zur Folge. Bisher ist eine Lösung des GMRes-Algorithmus nur bei Verwendung
eines von null verschiedenen Shifts möglich. Es muss geprüft werden, ob es noch weitere als
die im Vorfeld dieser Arbeit untersuchten und getesteten Lösungsverfahren gibt, die auf dieses spezielle Problem anpassbar bzw. bereits angepasst sind und eine schnellere Berechnung
ermöglichen.
Ein besonderes Augenmerk sollte auf der eingehenden Untersuchung des Einflusses der
rotationsbehafteten Strömung auf die Eigenfrequenzen liegen. Die Autorin vermutet, dass
weitere als die in dieser Arbeit untersuchten Effekte eine Rolle bei der Klangentstehung
spielen. Einerseits muss beachtet werden, dass die Navier-Stokes-Gleichung nichtlinear ist.
Bereits leichte Veränderungen im Anblasdruck führen zu großen Veränderungen des Strömungsfelds und diese Änderungen beeinflussen die Intonation des Instruments. Andererseits ist bisher unklar, ob eventuelle viskothermische Verluste die Eigenfrequenzen beeinflussen. Es bleibt der Verdacht, dass zusätzliche Faktoren eine Bedeutung für die Tonerhöhung
haben. Um welche es sich dabei genau handelt, wurde noch nicht endgültig geklärt.
Literaturverzeichnis
[1]
DEGA–Empfehlung 101, Akustische Wellen und Felder. März 2006
[2]
A GOS -E SPARZA, A. ; M ACHO -S TADLER, E. ; E LEJALDE -G ARC ÍA, M. J. ; L LANOS V ÁZQUEZ, R.: Effects of Changes in the Bore Shape and the Labium Position in a
Txistu. In: Acta Acustica united with Acustica 96 (2010), S. 635–641
[3]
D ’ A NDR ÉA -N OVEL , B. ; FABRE , B. ; C ORON , J.: An Acoustic Model for Automatic
Control of a Slide Flute. In: Acta Acustica united with Acustica 96 (2010), S. 713–721
[4]
A RGYRIS, J. ; M LEJNEK, H.: Die Methode der Finiten Elemente. Band 3.
schweig/Wiesbaden: Vieweg, 1988
[5]
A STLEY, R. J.: Wave envelope and infinite elements for acoustical radiation. In: International Journal for Numerical Methods in Fluids 3 (1983), S. 507–526
[6]
A STLEY, R. J.: Mapped spheroidal elements for unbounded wave problems. In: International Journal for Numerical Methods in Engineering (1998), Nr. 41, S. 1235–1254
[7]
A STLEY, R. J.: Infinite elements for wave problems: A review of current formulations and an assessment of accuracy. In: International Journal for Numerical Methods in
Engineering 49 (2000), S. 951–976
[8]
A STLEY, R. J.: Infinite Elements. Springer-Verlag, 2008 (Computational Acoustics of
Noise Propagation in Fluids - Finite and Boundary Element Methods, S. Marburg and
B. Nolte), Kapitel 7, S. 197–230
[9]
A STLEY, R. J. ; C OYETTE, J.: Conditioning of infinite element schemes for wave problems. In: Communications in Numerical Methods in Engineering 17 (2001), S. 31–41
[10]
A STLEY, R. J. ; E VERSMAN, W.: Finite element formulations for acoustical radiation. In:
Journal of Sound and Vibration 88 (1983), Nr. 1, S. 47–64
[11]
A STLEY, R. J. ; G AMALLO, P.: Special short wave element for flow acoustics. In: Computer Methods in Applied Mechanics and Engineering 194 (2005), S. 341–353
[12]
A STLEY, R. J. ; H AMILTON, J. A.: Numerical studies of conjugated infinite elements for
acoustical radiation. In: Journal of Computational Acoustics 8 (2000), Nr. 1, S. 1–24
[13]
A STLEY, R. J. ; H AMILTON, J. A.: The stability of infinite element schemes for transient
acoustics. In: European conference on computational mechanics, 2001
[14]
A STLEY, R. J. ; M ACAULAY, G. J. ; C OYETTE, J.: Mapped wave envelope elements for
acoustical radiation and scattering. In: Journal of Sound and Vibration 170 (1994), Nr. 1,
S. 97–118
Braun-
67
68
Literaturverzeichnis
[15]
A STLEY, R. J. ; M ACAULAY, G. J. ; C OYETTE, J. ; C REMERS, L.: Three-dimensional
wave-envelope elements of variable order for acoustic radiation and scattering. Part I.
Formulation in the frequency domain. In: Journal of the Acoustical Society of America 103
(1998), Nr. 1, S. 49–63
[16]
A STLEY, R. J. ; M ACAULAY, G. J. ; C OYETTE, J. ; C REMERS, L.: Three-dimensional
wave-envelope elements of variable order for acoustic radiation and scattering. Part
II. Formulation in the time domain. In: Journal of the Acoustical Society of America 103
(1998), Nr. 1, S. 64–72
[17]
B ACKUS, J.: Resonance Frequencies of the Clarinet. In: Journal of the Acoustical Society
of America 43 (1963), S. 509–519
[18]
B ACKUS, J.: Input impedance curves for the reed woodwind instruments. In: Journal
of the Acoustical Society of America 56 (1974), Nr. 4, S. 1266–1279
[19]
B AMBERGER, A.: Vortex sound and the flute. In: Journal of the Acoustical Society of
America 120 (2006), Nr. 5, S. 3362. – nur in Kurzfassung publiziert
[20]
B AO, W. ; WANG, X. ; B ATHE, K. J.: On the inf-sup condition of mixed finite element
formulations for acoustic fluids. In: Mathematical Models and Methods in Applied Sciences
11 (2001), Nr. 5, S. 883–901
[21]
B ARJAU, A. ; K EEFE, D. ; C ARDONA, S.: Time-domain simulation of acoustical waveguides with arbitrarily spaced discontinuities. In: Journal of the Acoustical Society of
America 105 (1999), Nr. 3, S. 1951–1964
[22]
B ÉCACHE, E. ; B ONNET-B EN D HIA, A. ; L EGENDRE, G.: Perfectly matched layers for
the convected Helmholtz equation. In: SIAM Journal on Numerical Analysis 42 (2004),
Nr. 1, S. 409–433
[23]
B ENADE, A.: On the Mathematical Theory of Woodwind Finger Holes. In: Journal of
the Acoustical Society of America 32 (1960), Nr. 12, S. 1591–1608
[24]
B ERENGER, J.: A perfectly matched layer for the absorption of electromagnetic waves.
In: Journal of Computational Physics 114 (1994), S. 195–200
[25]
B ERM ÚDEZ, A. ; H ERVELLA -N IETO, L. ; P RIETO, A. ; R ODR ÍGUEZ, R.: Optimal perfectly matched layer for time-harmonic acoustic scattering problems. In: Universidad
de Concepción, Chile, Preprint DIM (2006)
[26]
B ERM ÚDEZ, A. ; H ERVELLA -N IETO, L. ; P RIETO, A. ; R ODR ÍGUEZ, R.: Perfectly Matched
Layers. Springer-Verlag, 2008 (Computational Acoustics of Noise Propagation in Fluids
- Finite and Boundary Element Methods, S. Marburg and B. Nolte), Kapitel 6, S. 167–
196
[27]
B ERM ÚDEZ, A. ; H ERVELLA -N IETO, L. M. ; R ODR ÍGUEZ, R.: Finite element computation of three-dimensional elastoacustic vibrations. In: Journal of Sound and Vibration 219
(1999), S. 277–304
[28]
B ETTESS, P. ; Z IENKIEWICZ, O. C.: Diffraction and refraction of surface waves using
finite and infinite elements. In: International Journal for Numerical Methods in Engineering
11 (1977), S. 1271–1290
Literaturverzeichnis
69
[29]
B LANC, F. ; FABRE, B. ; M ONTGERMONT, N. ; C UADRA, P. L. ; A LMEIDA, A.: Scaling
of Flute-Like Instruments: An Analysis from the Point Of View of the Hydrodynamic
Instability of the Jet. In: Acta Acustica united with Acustica 96 (2010), S. 642–653
[30]
B REBBIA, C. A. ; T ELLES, J. F. ; W ROBEL, L. C.: Boundary Element Techniques, Theorie
and Applications in Engineering. Springer Verlag, Berlin, Heidelberg, New York, Tokyo,
1984
[31]
B REZZI, F. ; F ORTIN, M. ; B REZZI, F. (Hrsg.) ; F ORTIN, M. (Hrsg.): Mixed and Hybrid
Finite Element Methods. Springer Verlag, Berlin, Heidelberg, New York, 1991
[32]
B URNETT, D. S.: A three-dimensional acoustic infinite element based on a prolate spheroidal multipole expansion. In: Journal of the Acoustical Society of America (1994), Nr. 96,
S. 2798–2816
[33]
B URNETT, D. S. ; H OLFORD, R. L.: Prolate and oblate spheroidal acoustic infinite elements. In: Computer Methods in Applied Mechanics and Engineering (1996), Nr. 158,
S. 117–141
[34]
B URNETT, D. S. ; H OLFORD, R. L. Patent No. US005604891, 3-D acoustic infinite element based on a prolate spheroidal multipole expansion. 1997
[35]
B URNETT, D. S. ; H OLFORD, R. L. Patent No. US005604893, 3-D acoustic infinite element based on an oblate spheroidal multipole expansion. 1997
[36]
B URNETT, D. S. ; H OLFORD, R. L.: An ellipsoidal acoustic infinite element. In: Computer
Methods in Applied Mechanics and Engineering (1998), Nr. 164, S. 49–76
[37]
C HAPELLE, D. ; B ATHE, K. J.: The inf-sup test. In: Computers & Structures 47 (1993),
Nr. 4/5, S. 537–545
[38]
C HEN, Z. S. ; H OFSTETTER, G. ; M ANG, H. A.: A 3d boundary element method for determination of acoustic eigenfrequencies considering admittance boundary conditions.
In: Journal of Computational Acoustics 1 (1993), Nr. 4, S. 455–468
[39]
C ISKOWSKI, R. D. (Hrsg.) ; B REBBIA, C. A. (Hrsg.): Boundary Elements in Acoustics.
Southampton Boston: Computational Mechanics Publications and Elsevier Applied
Science, 1991
[40]
C OLTMAN, J. W.: Jet offset, harmonic content and warble in the flute. In: Journal of the
Acoustical Society of America 120 (2006), Nr. 4, S. 2312–2319
[41]
C REMERS, L. ; F YFE, K. ; C OYETTE, J.: A variable order infinite acoustic wave envelope
element. In: Journal of Sound and Vibration 171 (1994), S. 483–508
[42]
C RIGHTON, D. (Hrsg.) ; D OWLING, A. (Hrsg.) ; W ILLIAMS, J. F. (Hrsg.) ; H ECKL, M.
(Hrsg.) ; L EPPINGTON, F. (Hrsg.): Modern Methods in Analytical Acoustics (Lecture Notes). London: Springer-Verlag, 1992
[43]
D ASSIOS, G.: The Atkinson–Wilcox theorem in ellipsoidal geometry. In: Journal of
Mathematical Analysis and Application 274 (2002), S. 828–845
[44]
D IETZSCH, F.: Numerical Investigations for Sound Propagation in Moving Flows. In:
Diplomarbeit, Technische Universität Dresden (2011)
70
Literaturverzeichnis
[45]
D REYER, D. ; VON E STORFF, O.: Iterative Lösung von Außenraumproblemen mit halbunendlichen Finiten Elementen. In: Fortschritte in der Akustik: Plenarvorträge und Fachbeiträge der 28. Deutschen Jahrestagung für Akustik DAGA, 2002
[46]
D REYER, D. ; VON E STORFF, O.: Halbunendliche finite Elemente: Umhüllende, Genauigkeit, Kondition und Polynomwahl. In: Fortschritte in der Akustik: Plenarvorträge und
Fachbeiträge der 27. Deutschen Jahrestagung für Akustik DAGA, 2001, S. 410–411
[47]
D REYER, D. ; VON E STORFF, O.: Improved conditioning of infinite elements for exterior
acoustics. In: International Journal for Numerical Methods in Engineering 58 (2003), S. 933–
953
[48]
D UBOS, V. ; K ERGOMARD, J. ; K HETTABI, A. ; D ALMONT, J. ; K EEFE, D. ; N EDER VEEN , C.: Theory of Sound Propagation in a Duct with a Branched Tube Using Modal
Decomposition. In: Acta Acustica united with Acustica 85 (1999), Nr. 2, S. 153–169
[49]
VON E STORFF, O.: Boundary Element in Acoustics: Advances and Applications. In:
Southampton: WIT Press (2000)
[50]
E STORFF, O. ; P ETERSEN, S. ; D REYER, D.: Efficient Infinite Elements based on Jacobi
Polynomials. Springer Verlag, 2008 (Computational Acoustics of Noise Propagation in
Fluids - Finite and Boundary Element Methods, S. Marburg and B. Nolte), Kapitel 8,
S. 231–250
[51]
E VERSMAN, W.: Mapped infinite wave envelope elements for acoustic radiation in a
uniformly moving medium. In: Journal of Sound and Vibration 224 (1999), S. 665–687
[52]
F LETCHER, N. H. ; S MITH, J. ; TARNOPOLSKY, A. Z. ; W OLFE, J.: Acoustic impedance
measurements–correction for probe geometry mismatch. In: Journal of the Acoustical
Society of America 117 (2005), Nr. 5, S. 2889–2895
[53]
F RITZ, C. ; W OLFE, J.: How do clarinet players adjust the resonances of their vocal
tracts for different playing effects? In: Journal of the Acoustical Society of America 118
(2005), Nr. 5, S. 3306–3315
[54]
F USS, S. ; H AWKINS, S. C. ; M ARBURG, S.: An eigenvalue search algorithm for the
modal analysis of a resonator in free space. In: Journal of Computational Acoustics 19
(2011), Nr. 1, S. 95–109
[55]
F USS, S. ; H AWKINS, S. ; M ARBURG, S.: Acoustic Radiation Problem of a Recorder
Fluid. In: M ARBURG, S. (Hrsg.): Proceedings of the 9th International Conference on Theoretical and Computational Acoustics. Dresden, 2009, S. 129–134
[56]
F USS, S. ; M ARBURG, S.: Modal Analysis of a Fluid inside and around a Recorder.
In: B OONE, M. M. (Hrsg.): Proceedings of NAG/DAGA 2009, International Conference on
Acoustics. Rotterdam, 2009, S. 228–229
[57]
G ABARD, G. ; A STLEY, R. J.: A computational mode-matching approach for sound
propagation in three-dimensional ducts with flow. In: Journal of Sound and Vibration
315 (2008), S. 1103–1124
VON
Literaturverzeichnis
71
[58]
G ABARD, G. ; A STLEY, R. J. ; TAHAR, M. B.: Stability and accuracy of finite element
methods for flow acoustics. I: General theory and application to one–dimensional propagation. In: International Journal for Numerical Methods in Engineering 63 (2005), S. 947–
973
[59]
G ABARD, G. ; A STLEY, R. J. ; TAHAR, M. B.: Stability and accuracy of finite element
methods for flow acoustics. II: Two-dimensional effects. In: International Journal for
Numerical Methods in Engineering 63 (2005), S. 974–987
[60]
G ABARD, G. ; T REYSS ÈDE, F. ; TAHAR, M. B.: A numerical method for vibro-acoustic
problems with sheared mean flows. In: Journal of Sound and Vibration 272 (2004), S. 991–
1011
[61]
G ALBRUN, H.: Propagation d’Une Onde Sonore dans l’Atmosphère et Theorie des
Zones de Silence. In: Gauthier-Villars, Paris (1931)
[62]
G AMALLO, P. ; A STLEY, R. J.: The partition of unity finite element method for short
wave acoustic propagation on non-uniform potential flows. In: International Journal for
Numerical Methods in Engineering 65 (2006), S. 425–444
[63]
G ERDES, K.: The conjugated vs. the unconjugated infinite element method for the
Helmholtz equation in exterior domains. In: Computer Methods in Applied Mechanics
and Engineering (1998), Nr. 152, S. 125–145. – Research Report 96-11, Seminar für Angewandte Mathematik, ETH Zürich
[64]
G IVOLI, D.: Recent Advances in the DtN FE–Method. In: Archives of Computational
Methods in Engineering 6 (1999), Nr. 2, S. 71–116
[65]
G IVOLI, D.: Computational Absorbing Boundaries. Springer-Verlag, 2008 (Computational
Acoustics of Noise Propagation in Fluids - Finite and Boundary Element Methods, S.
Marburg and B. Nolte), Kapitel 5, S. 145–166
[66]
G ODIN, O. A.: Reciprocity and energy theorems for waves in a compressible inhomogeneous moving fluid. In: Wave Motion 25 (1997), S. 143–167
[67]
H AGSTROM, T. ; H ARIHARAN, S.: A formulation of asymptotic and exact boundary conditions using local operators. In: Applied Numerical Mathematics: Transactions of
IMACS 27 (1998), S. 403–416
[68]
H ARARI, I.: A survey of finite element methods for time-harmonic acoustics. In: Computer Methods in Applied Mechanics and Engineering 195 (1996), S. 1594–1607
[69]
H ARARI, I. ; G ROSH, K. ; H UGHES, T. R. ; M ALHOTRA, M. ; P INSKY, P. M. ; S TE J. R. ; T HOMPSON, L. L.: Recent development in finite element methods for
structural acoustics. In: Archives of Computational Methods in Engineering 3 (1996), Nr. 2–
3, S. 131–309
WART ,
[70]
H ARDTKE, H. ; M ARBURG, S.: A BEM based procedure to calculate boundary admittances from measure sound pressures. In: Engineering Analyses using Boundary Elements
21 (1998), Nr. 2, S. 185–190
[71]
H EIN, S. ; H OHAGE, T. ; K OCH, W.: On resonances in open systems. In: Journal of Fluid
Mechanics 506 (2004), S. 255–284
72
Literaturverzeichnis
[72]
H EIN, S. ; H OHAGE, T. ; K OCH, W. ; S CH ÖBEL, J.: Acoustic resonances in a high-lift
configuration. In: Journal of Fluid Mechanics 582 (2007), S. 179–202
[73]
H EIN, S. ; K OCH, W. ; N ANNEN, L.: Fano resonances in acoustics. In: Journal of Fluid
Mechanics 664 (2010), S. 238–264
[74]
H OHAGE, T. ; N ANNEN, L.: Hardy Space Infinite Elements for Scattering and Resonance Problems. In: SIAM Journal on Numerical Analysis 47 (2010), S. 972–996
[75]
H ORST, T.: Lösung des äußeren zeitharmonischen Abstrahlproblems mithilfe der Methode der finiten Elemente. (2002). – Großer Beleg, Technische Universität Dresden
[76]
I HLENBURG, F.: Applied mathematical sciences. Bd. 132 : Finite element analysis of acoustic scattering. New York, Berlin, Heidelberg: Springer-Verlag, 1998
[77]
I TSKOV, M.: Tensor Algebra and Tensor Analysis for Engineers, with Applications to Continuum Mechanics. Springer Verlag, Berlin, Heidelberg, New York, 2007
[78]
J ONES, D. S.: The eigenvalues of ∇2 u + λu = 0 when the boundary conditions are
given on semi–infinite domains. In: Proceedings of Cambridge Philosophers Society 49
(1953), S. 668–684
[79]
K ELLER, J. B. ; G IVOLI, D.: Exact nonreflecting boundary conditions. In: Journal of
Computational Physics 82 (1989), S. 172–192
[80]
K IRKUP, S. M.: The boundary element method in acoustics. In: Heptonstall: Integrated
Sound Software (1998)
[81]
K OB, M.: Eigenmodes of a flue organ pipe. In: Acta Acustica united with Acustica 86
(2000), Nr. 4, S. 755–757
[82]
K OB, M.: Influence of Wall Vibration on the Transient Sound of a Flue Organ Pipe. In:
Acta Acustica united with Acustica 86 (2000), Nr. 4, S. 642–648
[83]
K OCH, W.: Acoustic resonances in rectangular open cavities. In: AIAA Journal 43
(2005), S. 2342–2349
[84]
K OCH, W.: Acoustic resonances and trapped modes in annular plate cascades. In:
Journal of Fluid Mechanics 628 (2009), S. 155–180
[85]
K OLLMANN, F. G.: Maschinenakustik: Grundlagen, Messtechnik, Berechnung, Beeinflussung. 2. neubearbeitete Auflage. Berlin, Heidelberg, New York: Springer-Verlag, 2000
[86]
K ÜHNELT, H.: Sound generation in flutelike instruments: Simulation and analysis. In:
Journal of the Acoustical Society of America 120 (2006), Nr. 5, S. 3363. – nur Kurzfassung
publiziert
[87]
L EIS, R.: Initial boundary value problems in mathematical physics. John Wiley and Teubner
Verlag, Stuttgart, 1986
[88]
M ARBURG, S.: Normal modes in external acoustics. Part I: Investigation of the one–
dimensional duct problem. In: Acta Acustica united with Acustica 91 (2005), Nr. 6,
S. 1063–1078
Literaturverzeichnis
73
[89]
M ARBURG, S. ; D IENEROWITZ, F. ; H ORST, T. ; S CHNEIDER, S.: Normal modes in
external acoustics, part II: Eigenvalues and Eigenvectors in 2D. In: Acta Acustica united
with Acustica 92 (2006), S. 97–111
[90]
M ARBURG, S. ; N OLTE, B.: Computational Acoustics of Noise Propagation in Fluids - Finite
and Boundary Element Methods. Berlin, Heidelberg: Springer-Verlag, 2008
[91]
M ARBURG, S.: Normal modes in external acoustics. Part III: Sound power evaluation
based on frequency–independent superposition of modes. In: Acta Acustica united with
Acustica 92 (2006), Nr. 2, S. 296–311
[92]
M ARQUES, J. C. ; O WEN, D. J.: Infinite elements in quasi-static materially nonlinear
problems. In: Computers & Structures 18 (1984), Nr. 4, S. 739–751
[93]
M EERBERGEN, K.: Locking and Restarting Quadratic Eigenvalue Solvers. In: SIAM
Journal on Scientific Computing 22 (2001), Nr. 5, S. 1814–1839
[94]
M EERBERGEN, K. ; S PENCE, A.: Implicitly restarted Arnoldi with purification for the
shift-invert transformation. In: Mathematics of Computation 66 (1997), Nr. 218, S. 667–689
[95]
M EHRMANN, V. ; V OSS, H.: Nonlinear Eigenvalue Problems: A Challenge for Modern
Eigenvalue Methods. In: Mitteilungen der Gesellschaft für Angewandte Mathematik und
Mechanik 27 (2005), S. 121–151
[96]
M ÖBIUS, F.: Experimentelle und rechnerische Modalanalyse an einer Blockflöte. In:
Technische Universität Dresden, Diplomarbeit (2008)
[97]
M ÖBIUS, F. ; G IER, J. ; G ROTHE, T. ; M ARBURG, S.: Modal analysis of an alto recorder:
Experiment and simulation. In: Proceedings of NAG/DAGA 2009 in Rotterdam (2009)
[98]
N EDERVEEN, C. ; J ANSEN, J. ; VAN H ASSEL, R.: Correction for woodwind tone–hole
calculation. In: Acta Acustica united with Acustica 84 (1998), S. 957–966
[99]
P EYRET, C. ; É LIAS, G.: Finite-element method to study harmonic aeroacoustic problems. In: Journal of the Acoustical Society of America 110 (2001), Nr. 2, S. 661–668
[100] R ICHTER, A. ; F USS, S.: Schallproduktion und -abstrahlung resonatorgesteuerter
Schneidentöne. In: M ÖSER, M. (Hrsg.) ; S CHULTE -F ORTKAMP, B. (Hrsg.) ; O CH MANN , M. (Hrsg.): Fortschritte in der Akustik – Plenarvorträge und Fachbeiträge der 36. Jahrestagung für Akustik. Berlin, 2010, S. 587–588
[101] R ICHTER, A. ; F USS, S.: Sound production and radiation of resonator controlled edge
tones. In: B URGESS, M. (Hrsg.) ; D AVEY, J. (Hrsg.) ; D ON, C. (Hrsg.) ; M C M INN, T.
(Hrsg.): Proceedings of 20th International Congress on Acoustics, ICA 2010 Bd. (CD), 2010
[102] R ICHTER, A. ; G RUNDMANN, R.: Resonance frequencies and sound radiation of musical woodwind instruments. In: NAG/DAGA 2009 Rotterdam, 2009
[103] R ICHTER, A.: Numerische Untersuchungen des aeroakustischen Verhaltens des Fagotts, Technische Universität Dresden, Dissertation, 2009
[104] R ICHTER, A. ; G RUNDMANN, R.: Numerical simulation of a bassoon under real playing
conditions. In: Journal of applied science in the thermodynamics and fluid mechanics 1 (2008),
S. 1–5
74
Literaturverzeichnis
[105] R UGE, P.: Eigenvalues of damped structures: Vectoriteration in the original space of
DOF. In: Computational Mechanics (1998), Nr. 22, S. 167–173
[106] S AAD, Y.: Numerical Methods for large Eigenvalue Problems, Algorithms and Architectures
for Advanced Scientific Computing. Oxford Road, Manchester, UK: Manchester University Press, 1992
[107] S AAD, Y.: Iterative Methods for Sparse Linear Systems. SIAM, 2003
[108] S AAD, Y. ; S CHULTZ, M. H.: GMRES: A Generalized Minimal Residual Algorithm for
Solving Nonsymmetric Linear Systems. In: SIAM Journal on Scientific and Statistical
Computing 7 (1986), Nr. 3, S. 856–869
[109] S CHAUER, M. ; L ANGER, S. ; R OMAN, J. E. ; Q UINTANA -O RT Í: Large Scale Simulation
of Wave Propagation in Soils interacting with Structures using FEM and SBFEM. In:
Journal of Computational Acoustics 19 (2011), S. 75–93
[110] S HIRRON, J. J. ; B ABU ŠKA, I.: A comparison of approximate boundary conditions and
infinite element methods for exterior Helmholtz problems. In: Computer Methods in
Applied Mechanics and Engineering (1998), Nr. 164, S. 121–139
[111] S ONG, C.: The scaled boundary finite element method in structural dynamics. In:
International Journal for Numerical Methods in Engineering 77 (2009), S. 1139–1171
[112] S ONG, C. ; B AZYAR, M. H.: A boundary condition in Padé series for frequency-domain
solution of wave propagation in unbounded domains. In: International Journal for Numerical Methods in Engineering 69 (2007), S. 2330–2358
[113] S TEINBACH, O. ; U NGER, G.: A boundary element method for the Dirichlet eigenvalue
problem of the Laplace operator. In: Numerische Mathematik 113 (2009), S. 281–298
[114] S TEINBACH, O. ; U NGER, G.: Convergence orders of iterative methods for nonlinear eigenvalue problems / Österreichische Akademie der Wissenschaft. Version
2011. http://www.ricam.oeaw.ac.at/publications/reports/11/rep11-03.pdf, 2011. Forschungsbericht. - RICAM–Report 2011-03
[115] T HOMPSON, L.: A review of finite-element methods for time–harmonic acoustics. In:
Journal of the Acoustical Society of America 119 (2006), Nr. 3, S. 1315–1330
[116] T OSECKY, A. ; K OLEKOVA, Y. ; S CHMID, G. ; K ALINCHUK, V.: Three-dimensional transient half-space dynamics using the dual reciprocity boundary element method. In:
Engineering analysis with boundary elements 32 (2008), S. 597–618
[117] T REYSS ÈDE, F. ; G ABARD, G. ; TAHAR, M. B.: A mixed finite element method for acoustic wave propagation in moving fluids based on an Eulerian-Lagrangian description.
In: Journal of the Acoustical Society of America 113 (2003), Nr. 2, S. 705–716
[118] T REYSS ÈDE, F. ; TAHAR, M. B.: Comparison of a finite element model with a multiplescales solution for sound propagation in varying ducts with swirling flows. In: Journal
of the Acoustical Society of America 115 (2004), Nr. 6, S. 2716–2730
[119] W EISBECKER, H.: Numerical evaluation of the acoustic eigenvalue problem with present ambient flow velocity. In: Großer Beleg, Technische Universität Dresden (2009)
Literaturverzeichnis
75
[120] W ERNER, P.: Ein Resonanzphänomen in der Theorie akustischer und elektromagnetischer Wellen. In: Mathematical Methods in the Applied Sciences 6 (1984), S. 104–128
[121] W ERNER, P.: Zur Asymptotik der Wellengleichung und der Wärmeleitungsgleichung
in zweidimensionalen Außenräumen. In: Mathematical Methods in the Applied Sciences
7 (1985), S. 170–201
[122] W ILCOX, C. H.: A generalization of theorems of Rellich and Atkinson. In: Proceedings
of the American Mathematical Society 7 (1956), Nr. 2, S. 271–276
[123] W OGRAM, K. ; M EYER, J.: Zur Intonation bei Blockflöten. In: Acustica 55 (1984), Nr. 3,
S. 137–146
[124] W OGRAM, K. ; M EYER, J.: Über den spieltechnischen Ausgleich von Intonationsfehlern
bei Blockflöten. In: Tibia 10 (1985), Nr. 2, S. 322–335
[125] W OLFE, J. ; S MITH, J.: Cutoff frequencies and cross fingerings in baroque, classical,
and modern flutes. In: Journal of the Acoustical Society of America 114 (2003), Nr. 4,
S. 2263–2272
[126] W OLFE, J. ; S MITH, J. ; TANN, J. ; F LETCHER, N. H.: Acoustic impedance spectra of
classical and modern flutes. In: Journal of Sound and Vibration 243 (2001), Nr. 1, S. 127–
144
[127] W U, T. W. (Hrsg.): Boundary Element in Acoustics: Fundamentals and Computer Codes.
Southampton: WIT Press, 2000
[128] W U, T. W. ; S EYBERT, A. F.: Acoustic radiation and scattering. Computational Mechanics
Publications and Elsevier Applied Science, 1991 (Boundary Elements in Acoustics,
Ciskowski, R. D. and Brebbia, C. A.), Kapitel 3, S. 61–76
[129] Z IENKIEWICZ, O. C. ; B ANDO, K. ; B ETTESS, P. ; E MSON, C. ; C HIAM, T. C.: Mapped
infinite elements for exterior wave problems. In: International Journal for Numerical
Methods in Engineering 21 (1985), S. 1229–1251
Abbildungsverzeichnis
2.1
2.2
2.3
2.4
2.5
2.6
2.7
Allgemeines Gebiet Ω mit Rändern Γi . . . . . . . . . . . . . . . . . . . . . . . .
Komplettes Berechnungsgebiet, bestehend aus innerem und äußerem Bereich.
Finites P2 -Element (links) und finites TH-Element (rechts). . . . . . . . . . . .
Infinites P2 -Element (links) und infinites TH-Element (rechts). . . . . . . . . .
Infinites Taylor-Hood-Referenzelement. . . . . . . . . . . . . . . . . . . . . . .
Kartesische Koordinaten (x, y, z) und Ellipsoidkoordinaten (ρ, ϑ, ϕ). . . . . . .
Verwendete Kugelnetze der fünf verschiedenen Elementgrößen, dargestellt in
Abhängigkeit von der Anzahl der Elemente nel. . . . . . . . . . . . . . . . . .
2.8 Eigenvektoren der Eigenfrequenzen 1-10 der Vollkugel mit Radius r = 1 m. .
2.9 Analytische Lösung der vier ersten Eigenfrequenzen in Abhängigkeit von der
Machzahl. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.10 Eigenwerte der physikalischen Moden und der Störmoden bei verschiedenen
Machzahlen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
23
24
27
27
30
33
3.1
3.2
3.3
45
45
3.4
4.1
4.2
4.3
4.4
4.5
4.6
4.7
4.8
Einzelne Schritte des Eigenwert-Such-Algorithmus. . . . . . . . . . . . . . . .
Schematische Darstellung des Rohrmodells. . . . . . . . . . . . . . . . . . . . .
Vernetzung des Berechnungsgebiets, angedeutet mit finiten und infiniten Elementen. Die Darstellung erfolgt für eine bessere Übersicht in 2D. . . . . . . .
Grafische Darstellung des Eigenvektors (Druckverteilung) für den Fall einer
Machzahl von M a = 1 · 10−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Die für die Modellerstellung verwendete Sopranblockflöte der Firma Hohner;
www.hohner.de. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ausschnitt des FE-Modells. Gezeigt ist das Fluid innerhalb der und um die
Blockflöte für den Fall, dass alle Tonlöcher geöffnet sind. . . . . . . . . . . . .
Griffkombinationen der einzelnen Töne. Betrachtet werden nur die Töne mit
komplett geöffneten bzw. geschlossenen Tonlöchern. . . . . . . . . . . . . . .
Eigenvektor der Note c00 für den Grundton (oben) und die erste Harmonische
(unten). Die angegebene Skala ist in dB. . . . . . . . . . . . . . . . . . . . . . .
Eigenvektor der Note d000 für den Grundton (oben) und die erste Harmonische
(unten). Die angegebene Skala ist in dB. . . . . . . . . . . . . . . . . . . . . . .
Numerisch ermittelte Frequenzen in Abhängigkeit vom Freiheitsgrad. . . . .
Strömung in Flötenlängsrichtung v0z [ m
s ], interpoliert auf das FE-Netz für den
Ton c00 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Strömung in Flötenlängsrichtung v0z [ m
s ], interpoliert auf das FE-Netz für den
Ton d000 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
35
37
38
41
47
48
51
52
53
55
55
57
58
58
77
Tabellenverzeichnis
2.1
2.2
2.3
2.4
Eigenfrequenzen in Hz bei drei Interpolationspunkten Ip = 3 der infiniten
Elemente; die Nummerierung entspricht der Nummerierung der Eigenvektoren. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Eigenwerte von nel = 728 für drei verschiedene Interpolationspunkte Ip . . . .
Numerische Lösung des Rohrs bei verschiedenen Strömungsgeschwindigkeiten im Vergleich zur exakten Lösung; Eigenfrequenz in [Hz]. . . . . . . . . . .
Vergleich zwischen numerischer und analytischer Lösung der ersten zwei Eigenfrequenzen, sowie zur Helmholtz-Lösung im strömungsfreien Fall. Die Eigenfrequenzen sind in [Hz] angegeben. . . . . . . . . . . . . . . . . . . . . . .
3.1
3.2
Numerische Ergebnisse des Rohrs bei konstanter Strömungsgeschwindigkeit.
Variation des Modells für M a = 1 · 10−3 . . . . . . . . . . . . . . . . . . . . . . .
4.1
MIDI-Tabelle mit internationaler und deutscher Bezeichnung bei einer Stimmung auf a0 = 442 Hz. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Vergleich der numerisch ermittelten Eigenwerte der 14 Töne mit den exakten
Eigenfrequenzen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Konvergenzverhalten bezüglich der Anzahl der Interpolationspunkte der IE.
Konvergenzverhalten in Abhängigkeit vom Freiheitsgrad FG für Ip = 1. . . .
Eigenwerte der beiden untersuchten Töne, jeweils für den Fall des statischen
sowie des strömenden Fluids. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Gegenüberstellung der Lösungen von Galbrun- und Helmholtz-Gleichung im
Vergleich zur exakten Eigenfrequenz. . . . . . . . . . . . . . . . . . . . . . . .
Eigenwerte der beiden Töne. Gegenüberstellung der Ergebnisse unter Verwendung der originalen CFD-Daten und der lokal erhöhten Geschwindigkeitswerte. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2
4.3
4.4
4.5
4.6
4.7
36
36
39
39
48
48
53
54
56
56
58
59
60
79
In der vorliegenden Arbeit wird ein Programmcode zur numerischen Modalanalyse
dreidimensionaler Fluide in komplexen akustischen Systemen, speziell in Resonatoren,
entwickelt. Mit diesem Code ist es möglich, turbulente Strömungen im Rahmen der
Modalanalyse zu berücksichtigen. Hierzu wird ein realistisches Strömungsprofil, ermittelt mithilfe eines 3D-Navier-Stokes-Lösers, verwendet.
Der Hauptteil der Arbeit befasst sich mit der Herleitung der für die Berechnung
notwendigen Galbrun-Gleichung und deren Aufbereitung zur numerischen Analyse. Für
die numerische Umsetzung kommt die Methode der finiten Elemente in Verbindung mit
komplex konjugierten, infiniten Astley-Leis Elementen zur Anwendung. Die infiniten Elemente werden genutzt, um in den betrachteten Außenraumproblemen die Abstrahlung
in das Fernfeld abzubilden.
Nach der Anwendung des entwickelten Programmcodes auf einfachere Modelle erfolgen Untersuchungen zur Intonation einer Blockflöte. Hierzu wird das Fluid innerhalb
und im Nahfeld des Instruments unter Berücksichtigung des turbulenten Strömungsprofils, welches sich beim Spielen der Blockflöte ausbildet, betrachtet. Im Ergebnis stehen
die Eigenwerte des Instruments in Abhängigkeit von der gewählten Griffkombination.
Zur Evaluierung der Ergebnisse und zur Untersuchung des Einflusses der Strömung auf
den Klang erfolgt der Vergleich mit den exakten Eigenfrequenzen.
Die Galbrun-Gleichung wurde bereits von anderen Autoren untersucht und auf akustische Problemstellungen angewendet. Im Rahmen dieser Arbeit erfolgt jedoch erstmalig
die Anwendung der Galbrun-Gleichung auf Eigenwertprobleme. Darüber hinaus sind
der Autorin keine Arbeiten bekannt, die sich mit dreidimensionalen Modellen befassen.
In der vorliegenden Arbeit werden somit erstmals komplexe dreidimensionale Modelle
unter Anwendung der Galbrun-Gleichung untersucht.