Ferienkurs Experimentalphysik II Elektrodynamik Magnetostatik
Werbung

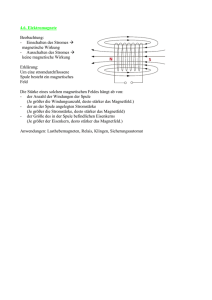
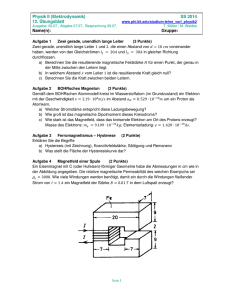
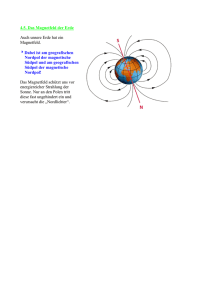
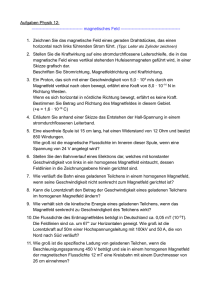
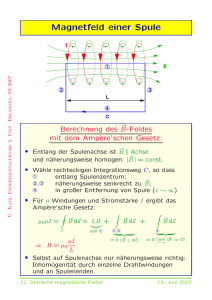
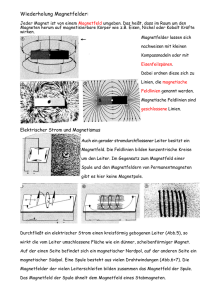
Ferienkurs Experimentalphysik II Elektrodynamik Magnetostatik 12. September 2011 Michael Mittermair Inhaltsverzeichnis 1 Permanentmagnete und Polstärke 2 2 Magnetfelder stationärer Ströme 2.1 Magnetfeldstärke und magnetische Erregung 2.2 Magnetischer Fluss und Quellenfreiheit . . . 2.3 Das Ampéresche Gesetz . . . . . . . . . . . 2.4 Das Vektorpotential . . . . . . . . . . . . . . 2.5 Das Gesetz von Biot-Savart . . . . . . . . . 2.6 Spezielle Leiter-Geometrien . . . . . . . . . 2.6.1 Die unendlich lange Spule . . . . . . 2.6.2 Die endlich lange Spule . . . . . . . . 2.6.3 Kreisförmige Leiterschleife . . . . . . 3 3 3 4 6 6 7 7 8 9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 Bewegte Ladungen im Magnetfeld 10 3.1 Hall-Effekt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 3.2 Magnetische Dipole . . . . . . . . . . . . . . . . . . . . . . . . 11 4 Materie im Magnetfeld 13 1 Kapitel 1 Permanentmagnete und Polstärke • Magneten haben immer Nord und Südpol, es gibt also keine magnetischen Monopole • Nord und Südpol ziehen sich an, gleichnamige stoßen sich ab • magnetische Feldlinien sind immer geschlossen • Nordpol des Erdmagnetfeldes ist eigentlich ein magnetischer Südpol • Feldlinien zeigen nach ihrer Definition immer von einem Nordpol zu einem Südpol 2 Kapitel 2 Magnetfelder stationärer Ströme 2.1 Magnetfeldstärke und magnetische Erregung ~ stellt bei Magneten die Das Analogon zur elektrischen Feldstärke E ~ dar. Sie hat die Einheit magnetische Flussdichte oder Magnetfeldstärke B ~ = T = N . Außerdem gibt es analog zur dielektrischen Verschiebung [B] Am ~ ~ mit der Einheit [H] ~ = A Die D die magnetische Erregung/Feldstärke H m beiden Größen sind durch durch die magnetische Feldkonstante µ0 miteinander verknüpft, sie beträgt 12, 566 ∗ 10−7 H/m . ~ = µ0 · H ~ B 2.2 Magnetischer Fluss und Quellenfreiheit Jeder elektrische Strom erzeugt ein Magnetfeld. Dieses hängt stark von der Geometrie des Leiters ab. Wie beim elektrischen Kraftfluss wird nun der magnetische Fluss eingeführt. Er ist als das Integral der magnetischen Flussdichte/B-Feld über 3 die durchflossene Fläche definiert. Φm = R ~ ~ · dA B A Der Fluss gibt also sozusagen die Anzahl der Feldlinien an, die die Fläche durchdringen. Da magnetische Feldlinien immer geschlossen sind (Keine magnetischen Monopole) muss bei einer geschlossenen Oberfläche das Integral Null ergeben. Da genau so viele Linien rausgehen wie reingehen. H ~ ≡0 ~ · dA B A Nach dem Satz von Gauß kann man das Integral der Flussdichte über den Rand eines Volumens(= Oberf läche) durch das Integral der Divergenz der Flussdichte über das Volumen ersetzen. H R ~ = div B ~ · dA ~ · dV ≡ 0 B A V ~ =0 ⇒ div B ”Quellenfreiheit von Magnetfeldern” 2.3 Das Ampéresche Gesetz Als einfachste zu beschreibende Leitergeometrie wählen wir nun einen unendlich langen dünnen Draht. Der Strom I erzeugt dabei ein I radial-symmetrisches Magnetfeld mit der Stärke H = 2πr 4 Durch Integration beider Seiten entlang der Kreisbahn mit Radius r ergibt sich dann. H ~ · d~r = I · 2πr = I H 2πr c Für einen anderen Integrationsweg, der den Draht nicht einschließt ergibt sich immer als Wert des Integrals die Null. Allgemein lässt sich dann finden, dass der Wert des Integrals von der Form des Weges unabhängig ist und nur die eingeschlossenen Ströme zählen. H ~ folgt mit I = ~j · dA A H R ~ · d~r = ~j · dA ~ H A C=∂A Das Ampéresche Gesetz in Integralform Mit dem Satz von Stokes aus der Vektoranalysis lässt sich die linke Seite der Gleichung umformen. H R ~ · d~r = ∇ ~ ×H ~ · dA ~ H C=∂A A Damit ergibt sich: R ~ ×H ~ · dA ~= ∇ A R A 5 ~ ~j · dA Durch Weglassen der Integrationszeichen ergibt sich dann die differentielle Darstellung des Ampéreschen Gesetzes ~ H ~ = ~j ∇x Man kann beide Formen auch mit dem B-Feld ausdrücken H R ~ · d~r = µ0 ~j · dA ~ B A C=∂A ~ ×B ~ = µ0 · ~j ∇ 2.4 Das Vektorpotential ~ konnte ein skalares Potential definiert werden, so Für das elektrische Feld E dass das E-Feld als Gradientenfeld daraus hervorgeht. Eine solche Definition lässt sich für das Magnetfeld leider nicht einführen, da ein Kreisintegral hier nicht zwingend 0 ergibt und dies aber für ein ~ Gradientenfeld erfüllt sein muss. Stattdessen wird ein Vektorpotential A eingeführt, das wie folgt definiert ist: ~ = rotA ~ B Dieses Vektorpotential erfüllt automatisch die Bedingung, da die Divergenz angewendet auf die Rotation eines Vektorfeldes immer 0 ergibt. ~ ist nicht eindeutig bestimmt. Es können beliebige Gradientenfelder dazu A addiert werden, da gilt: ~0 = A ~ + ∇f ~ für A ~ ~ ~ ~ ~ ~ ×A ~ B = ∇ × A + ∇ × ∇f = ∇ Diese Eichfreiheit wird meist genutzt, um das Vektorpotential so zu definieren, dass die Coulomb-Eichung erfüllt ist. ~ ·A ~=0 ∇ 2.5 Das Gesetz von Biot-Savart In der Elektrostatik gibt es eine Gleichung, die einen direkten Zusammenhang zwischen Potential und Ladungsverteilung beschreibt. φ(~r) = 1 R ρ(r~0 ) dV 4πε0 dV 0 |~r − r~0 | 6 Analog dazu gibt es in der Magnetostatik: R ~j(r~0 ) ~ r ) = µ0 dV A(~ 4π dV 0 |~r − r~0 | Diese Gleichung beschreibt das Vektorpotential, das von einer Stromdichte ~j(r~0 ) am Ort ~r erzeugt wird. Das B-Feld lässt sich dann über die Rotation berechnen. ~ r) = ∇ ~ ×A ~= B(~ ~j(r~0 ) µ0 R ~ = ∇r × d3 r~0 = 0 ~ 4π dV 0 |~r − r | (~r − r~0 ) 3 ~0 µ0 R ~ ~0 j(r ) × = dr 4π dV 0 |~r − r~0 |3 Mit dieser Formel kann man das Magnetfeld einer beliebigen Stromverteilung bestimmen. Problem: Volumenintegral kann sehr kompliziert werden! Für einen extrem dünnen Leiter mit dem infinitesimalen Leiterquerschnitt ~ gilt allerdings: A ~ · d~s = I · d~s ~j · dV = ~j · dA Da ~j über A als konstant angenommen werden kann. Die Gleichung vereinfacht sich zu einem Linienintegral. ~0 R ~ r) = − I · µ0 (~r − r ) × d~s B(~ 4π |~r − r~0 |3 Das Biot-Savart’sche Gesetz. In differentieller Form lautet es: ~ r) = dB(~ 2.6 2.6.1 I · µ0 (~r − r~0 ) · d~s × 4π |~r − r~0 |3 Spezielle Leiter-Geometrien Die unendlich lange Spule Um das Magnetfeld einer unendlich langen Spule zu bestimmen, verwendet man wiederum das Ampéresche Gesetz. Als geschlossenen Integrationsweg wählt man dabei ein Rechteck, dessen eine Seite entlang der Achse der Spule verläuft. Es schließt also eine Spulenhälfte ein. 7 Man kann es in vier Teilintegrale zerlegen. Es gilt: µ0 IN = H ~ s= Bd~ RB Bds + A RC Bds + B RD Bds + C RA Bds D Dabei ist zu beachten, dass sich die Integralteile von B nach C und von D nach A gegenseitig aufheben. Wenn man die Strecke von C nach D ins unendlich verlagert, verschwindet dieser Teil ebenfalls, da das B-Feld im Unendlichen verschwindet. Es bleibt also nur übrig: µ0 · I · N = RB Bds = L · B A ⇒B= 2.6.2 µ0 N ·I L Die endlich lange Spule N Bei der endlich langen Spule mit der Windungszahldichte n = und dem L Windungsradius R gilt: " # µ0 · I · n z + L/2 z − L/2 p Bz (z) = −p 2 R2 + (z + L/2)2 R2 + (z + −L/2)2 8 2.6.3 Kreisförmige Leiterschleife Eine kreisförmige Leiterschleife mit Radius R, die in der x-y-Ebene liegt und vom Strom I durchflossen wird, erzeugt, wegen ihrer Symmetrie, ein Magnetfeld, das auf der z-Achse nur eine z-Komponente hat. Diese ist gegeben durch: µ0 IR2 B(z) = 2(R2 + z 2 )3/2 9 Kapitel 3 Bewegte Ladungen im Magnetfeld Sobald sich eine Ladung in einem Magnetfeld bewegt, tritt die sogenannte Lorentz-Kraft auf. Ihre Richtung kann durch die Drei-Finger-Regel ermittelt werden. Sie ist definiert als: ~ F~ = q(~v × B) Liegt des Weiteren ein E-Feld an, so überlagern sich die Coulombkraft und die Lorentzkraft. Es gilt: ~ + (~v × B)) ~ F~gesamt = q(E Beispiel: Für einen geraden Draht der Länge L im homogenen Magnetfeld, lässt sich die Lorentzkraft recht einfach bestimmen: ~ ~ = I(L ~ × B) ~ ~ = I · t(( L ) × B) F~ = q(~v × B) t Mit der Vorstellung, dass jeder Leiter aus unendlich vielen infinitesimalen geraden Leiterabschnitten besteht kann man dann folgern, dass für die Kraft pro Längenelement gilt: ~ ×B ~ dF~ = I · dL 10 3.1 Hall-Effekt Befindet sich ein stromdurchflossener Leiter in einem Magnetfeld, so werden die Ladungen im inneren des Leiters getrennt. Im Gleichgewicht gilt dabei, dass die Lorentzkraft genau so groß ist wie das durch die Aufspaltung erzeugte E-Feld EH . Dabei kann man die sogenannte Hall-Spannung messen. UH = EH · b = I · B = RH · I nqd B nqd Für sehr flache Leiter(b → 0) ergibt sich der Quanten-Hall-Effekt. Hierbei h ist der Hall-Widerstand quantisiert. RH = mit k = 1, 2, 3... k · e2 Mit dem Hall-Widerstand RH = 3.2 Magnetische Dipole Das magnetische Dipolmoment p~m ist definiert durch: ~ p~m = I · A Es wird auch oft mit µ ~ bezeichnet. Die Lorentzkraft auf eine eckige Leiterschleife im homogenen Magnetfeld lässt sich aus der allgemeinen Formel für die Lorentzkraft herleiten. ~ ×B ~ dF~L = I · dL ~ ~ FL = I · a · ~ea × B Hierbei wirken nur die Kräfte der beiden Seiten parallel zur Rotationsachse. 11 Für das Drehmoment ergibt sich damit: ~ = 2 · b · ~eb × F~L M 2 ~ = I · a · b · (~eb × ~ea ) × B ~ =I ·A ~×B ~ M ~ =µ ~ M ~ ×B Die Energie des Dipols beträgt ~ EP ot = −~µ · B ~ Sie ist demnach minimal für µ ~ ||B 12 Kapitel 4 Materie im Magnetfeld Analog zur Polarisierung P wird die Magnetisierung definiert: ~ = 1 P M V V vecµ ~ ] = 1A mit der Einheit [M m Sie entsteht durch die Ausrichtung der ätomaren magnetischen Momente”. Dabei ändert sich das Magnetfeld im Inneren des Materials um den Faktor µ, die sogenannte relative Permeabilität. Diese ist materialabhängig. Das Magnetfeld in Materie ergibt sich dann zu: ~ = µB ~ 0 = µµ0 H ~0 B Es wird wiederum eine Suszeptibilität eingeführt. µ = 1 + χm ~ ~ = µ0 · H ~ + µ0 · χ m · H ~ → B = µ0 · (1 + χm ) · H ~ = χm · H ~ →M Materialien werden nach ihren magnetischen Eigenschaften eingeteilt Diamagnetische Stoffe χ < 0 |χ| 1 zB. Kr, Xe Paramagnetische Stoffe χ > 0 |χ| 1 zB. Na, O2 Ferromagnetische Stoffe χ > 0 |χ| 1 zB. Fe, Co 13