4.3 Elektrotechnische Systeme - Europa
Werbung

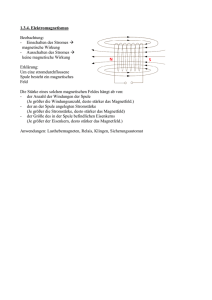
4.3 Elektrotechnische Systeme 4.3 Elektrotechnische Systeme Nach dem Durcharbeiten dieses Abschnitts werden Sie in der Lage sein, ▪▪ e in komplexes elektrotechnisches System zu analysieren und dessen Aufbau und Funktionsweise zu erläutern. ▪▪ d en Aufbau und die grundsätzliche Funktionsweise von Elektromotoren, Akkumulatoren und deren Steuerungselektronik zu beschreiben. Die Elektro- und Informationstechnik ist in allen Bereichen des täglichen Lebens gegenwärtig. Ohne Elektrizität funktioniert kein Haushaltsgerät mehr, kein Computer, Tablet oder Smartphone, kein Flugzeug und kein Auto. Auch die Fertigung in den Fabriken würde ohne elektrischen Strom stillstehen und jede Wohnung wäre kalt und dunkel. Vorgehensweise Da wir in diesem Buch nicht alle elektrotechnischen Systeme analysieren können, wird die Untersuchung exemplarisch an einigen konkreten Beispielen durchgeführt. Wie in der Technik üblich, gehen wir dabei strukturiert und systematisch vor, so dass Sie diese Vorgehensweise auf nahezu jedes andere technische System übertragen können. 295 ▪▪ G lühlampen sind im Betrieb sehr heiß, denn mehr als 90 % der zugeführten elektrischen Energie werden nicht in Licht, sondern in Wärme umgewandelt. ▪▪ D ie Leuchtwirkung des elektrischen Stroms ist bei der Glühlampe offensichtlich, obwohl weniger als 10 % der zugeführten elektrischen Energie in Strahlungsenergie umgewandelt werden. Sie sind als Leuchtmittel also sehr ineffektiv. Das ist der Grund, warum Standard-Glühlampen in der EU seit 2012 nicht mehr verkauft werden dürfen. ▪▪ D ie magnetische Wirkung des elektrischen Stroms lässt sich beobachten, wenn man in die Nähe einer eingeschalteten Glühlampe einen Magneten hält. Der Glühwendel beginnt dann heftig zu schwingen, was bei ausgeschalteter Lampe nicht der Fall ist. Daraus kann man schließen, dass die magnetische Wirkung durch den elektrischen Strom verursacht wird. Die chemische Wirkung des elektrischen Stromes wird u. a. in Akkumulatoren genutzt, z. B. in einem Blei-Akkumulator (Bild 2). Bei der Beschreibung der Funktionsweise eines Akkus, muss man zwei Betriebsfälle unterscheiden: Trotz der Vielfalt der Anwendungen beruht die Funktionsweise aller elektrotechnischen Systeme auf wenigen Wirkungen des elektrischen Stroms. Wirkungen des elektrischen Stroms Man unterscheidet im Wesentlichen vier technische Wirkungen des elektrischen Stromes. Auf diese lässt sich die Funktionsweise aller elektrotechnischen Systeme zurückführen. Die fünfte Wirkung des elektrischen Stroms ist die physiologische Wirkung und bedeutet, dass der elektrische Strom für den Menschen und andere Lebewesen gefährlich ist. ▪▪ Wärmewirkung ▪▪ Leuchtwirkung Bild 1: Glühlampe Laden Entladen I ▪▪ Magnetische Wirkung G I Altgriechisch von φύσις = phýsis, deutsch ‚Natur‘ und λόγος = lógos, deutsch ‚Lehre‘. Die Lehre von den physikalischen und biochemischen Vorgängen in den Zellen und Organen von Lebewesen. 1Physiologie: I H+ PbO2 An einer mit Wechselstrom betriebenen gewöhnlichen Glühlampe (Bild 1) kann man die ersten drei Stromwirkungen an einem Beispiel beobachten. Auflösung PbSO4 ▪▪ Physiologische1 Wirkung PbSO4 ▪▪ Chemische Wirkung verdünnte Schwefelsäure Bleisulfat H+ I SO4 Pb 4.3.1 verdünnte Schwefelsäure Elektrolyt Bleioxid Pb: Blei, PbO2: Bleidioxid, PbSO4: Bleisulfat Bild 2: Chemische Prozesse im Bleiakkumulator Blei 296 4 Elektrotechnik ▪▪ Aufladevorgang: Durch Zufuhr von elektrischer Energie wird der Ladevorgang in Gang gesetzt: 2 PbSO4 + 2 H2O → Pb + 2 H2SO4 + PbO2 ▪▪ Entladevorgang: Schließt man an die beiden Pole des aufgeladenen Blei-Akkus einen Verbraucher an, so findet ein Stromfluss statt und der Entladevorgang beginnt: Pb + 2 H2SO4 + PbO2 → 2 PbSO4 + 2 H2O Die physiologische Wirkung des elektrischen Stroms spürt der Mensch schon bei sehr geringen Stromstärken. Wechselströme im Bereich der Netzfrequenz sind schon ab Stromstärken von 0,5 mA spürbar, ab 10 mA werden sie gefährlich und können für Kinder unter Umständen bereits tödlich sein. Gleichströme sind ab 2 mA spürbar und werden ab 25 mA gefährlich. Die in Tabelle 1 genannten Werte gelten nur, wenn sich der Strom über den gesamten Körper verteilt und sich nicht auf den Herzmuskel konzentriert. Bei Strömen, die direkt auf den Herzmuskel wirken, können bereits sehr viel geringere Stromstärken Herzkammerflimmern auslösen. Besondere Vorsicht ist bei Hochspannungen geboten, denn bei diesen kann es ohne direkte Berührung bereits zu Überschlägen und damit zu tödlichen Stromschlägen kommen. Alles verstanden? 1. G eben Sie alle Wirkungen des elektrischen Stroms wieder! 2. B eschreiben Sie, was man unter den physiologischen Wirkungen des elektrischen Stroms versteht! Arbeitsauftrag 1. Auch in klassischen Automobilen mit Otto- oder Dieselantrieb sind viele elektrische Systeme im Einsatz. Stellen Sie für alle technischen Wirkungen des elektrischen Stroms Anwendungsbeispiele aus diesem Bereich zusammen! 4.3.2Elektrotechnisches System E-Bike oder Pedelec Elektromobilität ist eines der großen technischen Themen unserer Zeit und wird es sicher auch noch in der ganzen Dekade der 2020 Jahre sein. Die Bundesregierung hat für die BRD das Ziel vorgegeben, bis zum Jahr 2020 eine Million Elektro-Kfz auf die Straße zu bringen. Bereits im Jahr 2016 ist deutlich erkennbar, dass dieses Ziel klar verfehlt werden wird. Die Technik ist hochkomplex und ein Elektro-Kfz mit absoluter Alltagstauglichkeit zu entwickeln ist auch für deutsche Ingenieure eine riesige Herausforderung. In einem anderen Bereich des Verkehrswesens ist die Elektromobilität jedoch bereits weit fortgeschritten. Im Jahr 2005 begann nämlich, durch das Aufkommen des Lithium-Ionen-Akkumulators begünstigt, ein bis heute ungebrochener Verkaufsboom einer neuen Art von Elektro-Fahrrädern, nämlich von Pedelecs (Bild 1 folgende Seite). Allein im Jahr 2015 wurden in Deutschland 520 000 Stück verkauft und die Tendenz ist weiterhin stark steigend. In diesem Kapitel werden Aufbau und Funktionsweise dieses technischen Systems und seiner Komponenten schrittweise untersucht. Das Pedelec ist aus mehreren Gründen ein ideales Beispiel für ein modernes und komplexes elektrotechnisches System. Zum einen, weil es als Nahverkehrsmittel voll im Trend liegt, zum anderen, weil Tabelle 1: Stromstärken und ihre physiologischen Wirkungen Stromstärke in mA Dauer in ms Physiologische Auswirkungen < 0,5 beliebig lange Wahrnehmbarkeitsschwelle: Unter diesem Wert sind elektrische Wechselströme für den Menschen nicht wahrnehmbar. < 10 ≤ 2 000 < 200 ≤ 10 ≤ 100 > 500 ≤ 1 000 < 200 > 100 > 500 > 1 000 < 200 Es treten im Allgemeinen keine pathophysiologischen Wirkungen auf. Starke unwillkürliche Muskelreaktionen, welche zu dauerhaften Schäden führen können. Zusätzlich zu starken unwillkürlichen Muskelreaktionen kann Herzkammerflimmern auftreten. 4.3 Elektrotechnische Systeme 297 in diesem unscheinbaren Gerät modernste Technik aus verschiedenen Bereichen der Elektrotechnik vereinigt ist. Man findet High-Tech-Komponenten aus folgenden Bereichen: ▪▪ Motortechnik ▪▪ Akkumulatortechnik ▪▪ Steuerungs- und Regelungstechnik ▪▪ Sensortechnik Varianten des Pedelec Grundsätzlich gibt es drei verschiedene Stellen, an denen der Motor des Pedelecs platziert werden kann. Zwar hat sich im Laufe der Entwicklung der Tretlagermotor bei vielen Herstellern durchgesetzt, aber auch die Nabenmotoren haben bestimmte Vorteile. In Tabelle 1 sind Vor- und Nachteile der verschiedenen Bauformen gegenübergestellt. ▪▪ Digitale und Analoge Schaltungstechnik Der Begriff Pedelec ist ein Schachtelwort für Pedal-Electric-Cycle und bezeichnet ein Elektrofahrrad, bei dem der Fahrer von einem Elektroantrieb nur dann unterstützt wird, wenn er gleichzeitig auch selbst in die Pedale tritt. In der BRD gelten folgende Bestimmungen: ▪▪ N ormale Pedelecs: Die Motorunterstützung muss bei 25 km/h abgeschaltet werden. ▪▪ S -Pedelecs: Die Motorunterstützung muss bei 40 km/h abgeschaltet werden. Sie benötigen allerdings wie Mofas ein Versicherungskennzeichen. Bild 1: High-Tech-Pedelec – Neox-Crosser Tabelle 1: Vor- und Nachteile der verschiedenen Bauformen Motortyp Nabenmotor im Vorderrad Vorteile • • • • • • Einfachste und kostengünstigste Variante Nachrüstung ist bei fast jedem Fahrrad möglich Rücktrittbremse möglich Einfaches ausbauen der Räder möglich Vorteilhafte Gewichtsverteilung Rekuperation möglich Rekuperation bedeutet: Der Motor wird auf Generatorbetrieb umgeschaltet, das Pedelec wird gebremst und der Akku aufgeladen. Nachteile • L enkung wird durch Zusatzgewicht negativ beeinflusst • Schlechtere Kraftübertragung, wg. geringerem Gewicht auf dem Vorderrad • Fahrverhalten ist ungewohnt, da Motor das Rad zieht • Längere Kabelwege nötig Kein Nabendynamo möglich • Starke mechanische Belastung der Fahrradgabel Nabenmotor im Hinterrad • G ute Traktion, wg. höherem Gewicht auf der Hinterachse • Hohe Fahrsicherheit • Keine Zusatzlast an der Kette, da die Leistung am Hinterrad produziert wird • Nabendynamo im Vorderrad möglich • Problemloser Vorderradwechsel möglich • Rekuperation möglich • Hinterradausbau umständlich • Hecklastig, wenn sich auch der Akku im Heckbereich befindet • Keine Rücktrittbremse möglich • Störungsanfälliger, wg. aufwändiger Kabelverlegungen und Steckverbindungen Mittelmotor am Tretlager • Kompaktere Bauweise möglich • Nur ein Kabel zur Bedieneinheit am Lenker notwendig • Art der Schaltung an der Hinterachse ist frei wählbar • Beide Räder leicht auszubauen • Tiefer Schwerpunkt und gute Gewichtsverteilung • Gutes und sicheres Fahrgefühl • Nabendynamo möglich • H oher Kettenverschleiß, wg. höherer Belastungen • Kette und Ritzel müssen öfter gewechselt werden • Höhere Kosten, da keine Standardrahmen verwendet werden können • Keine Rekuperation möglich 298 4 Elektrotechnik Analyse des Gesamtsystems Pedelec geübte Drehmoment, die Motordrehzahl und die Geschwindigkeit gemessen werden. Der Controller ist, obwohl bis auf das Display und die Bedieneinheit im Motor integriert, dennoch ein eigenständiges Subsystem und wird deshalb auch als solches gezeichnet. Das Gesamtsystem Pedelec lässt sich als Energiewandlungssystem mit zwei Eingängen darstellen (Bild 1). Die kinetische Energie Ekin1 wird dem System von dem Fahrer über die Tretkurbel zugeführt und die elektrische Energie Eel wird vom Akku in das System eingespeist. Am Systemausgang liegt die kinetische Energie Ekin2 vor und unter Umständen kommt noch die potentielle Energie Epot hinzu, wenn es sich um eine Bergauffahrt handelt. Stellt man das Gesamtsystem mit seinen Subsystemen dar, so ergibt sich vereinfacht folgendes Blockschaltbild (Bild 3): Die Darstellung des Systems Pedelec als BlackBox genügt für die Untersuchung der elektrotechnischen Komponenten des Systems jedoch nicht. Es ist daher erforderlich, dass System in seine Subsysteme zu zerlegen. Eel Technisches System Pedelec Ekin1 Die Analyse ergibt, dass in jedem Pedelec insgesamt drei elektrotechnische Komponenten vorhanden sind, nämlich folgende: Ekin2 (evtl. + Epot) Bild 1:Allgemeine Darstellung des technischen Systems Pedelec als Black-Box ▪▪ Akkumulator ▪▪ Motor ▪▪ Controller oder Steuerungseinheit Die drei verschiedenen Komponenten lassen sich am besten an einem Pedelec mit Nabenmotor sichtbar machen (Bild 2). An dem betrachteten Bausatz sitzt der Motor auf der Nabe des Hinterrads und bildet somit mit diesem eine Einheit. Der Akku ist die zweite deutlich sichtbare Komponente, die auch ein beträchtliches Gewicht aufweist. Die gesamte Elektronik des Controllers und auch alle notwendigen Sensoren sind im Nabenmotor integriert, nur die Anzeige und die Bedieneinheit sind am Lenker befestigt. Nabenmotor Akkumulator Display des Controllers Zur einwandfreien Funktion des Systems sind eine ganze Reihe von Sensoren notwendig. Unter anderem muss das vom Fahrer auf die Kurbel aus- Bild 2:Elektrische Komponenten eines PedelecBausatzes von BionX E el Akkumulator U2 U1 Motor mit Hinterrad Controller Anzeige E kin1 M D (vom Sensor) Tretkurbel E kin2 Energiefluss Bild 3: Technisches System Pedelec mit Subsystemen Kette Informationsfluss E kin3 E kin4 (Epot) 4.3 Elektrotechnische Systeme Erläuterung des System-Blockschaltbildes: Bei Beginn einer Fahrt ist der Akkumulator vollgeladen und vom Netz getrennt, ihm wird also keine elektrische Energie zugeführt. Nur der Fahrer führt von außen über die Tretkurbel dem System die kinetische Energie Ekin1 zu und wählt an der Bedieneinheit am Lenker die gewünschte Unterstützungsstufe U1. Der Controller erhält vom Drehmomentsensor im Motor das aktuell vom Fahrer eingespeiste Drehmoment MD und berechnet aus den Größen MD und U1 sowie der aktuellen Geschwindigkeit v das Signal U2, das dem Motor mitteilt, welche zusätzliche kinetische Energie er liefern muss. Die dazu notwendige elektrische Energie erhält der Motor vom Akku. Die Summe aus Motorenergie und der Energie Ekin3 ergibt schließlich die Nutzenergie Ekin4 plus den potentiellen Energiegewinn bei einer Bergfahrt. Auch der Ladezustand des Akkus und weitere wichtige Parameter werden vom Controller überwacht und gesteuert. Alles verstanden? 1. N ennen Sie die Hauptfunktion des technischen Systems Pedelec! 2. B egründen Sie, warum sich der Tretlagermotor weitestgehend durchgesetzt hat! 3. G eben Sie an, wie viele elektrotechnische Subsysteme das System Pedelec beinhaltet! 4. E rläutern Sie die Aufgabe des Subsystems „Controller“! 5. E rklären Sie, warum der Akkumulator im Blockschaltbild keine Eingangsgröße besitzt! In den folgenden Abschnitten werden der Reihe nach die verschiedenen Komponenten eines Pedelecs untersucht, ihr Aufbau beschrieben und ihre Funktionsweise erläutert. 299 Wirkung des elektrischen Stromes, die schon im Jahr 1819 von dem Dänen Hans Christian Oerstedt experimentell nachgewiesen wurde (Bild 1). Auf einen stromdurchflossenen Leiter in einem Magnetfeld wirkt eine Kraft, deren Richtung senkrecht zum Magnetfeld und senkrecht zum Leiter zeigt (Bild 1). Die Richtung der Ablenkkraft hängt einerseits von der Stromrichtung im Leiter und andererseits von der Richtung des Magnetfeldes, dem Polfeld ab. Betrachtet man zunächst nur das Polfeld, so erkennt man ein homogenes Magnetfeld, deren Feldlinien vom magnetischen Nordpol zum Südpol verlaufen (Bild 1a folgende Seite). Anschließend wird nur das Magnetfeld um den stromdurchflossenen Leiter dargestellt (Bild 1b folgende Seite). Wenn der Strom wie abgebildet in die Blattebene fließt, so bildet sich um den Leiter ein konzentrisches Magnetfeld im Uhrzeigersinn. Wirken beide Magnetfelder gleichzeitig, so überlagern sich die Felder und bilden ein gemeinsames resultierendes Feld (Bild 1c folgende Seite). Auf der Seite des Leiters, auf der die beiden Felder entgegengesetzt gerichtet sind, schwächen sich die Felder gegenseitig, während sie sich auf der anderen Seite gegenseitig verstärken. Die Ablenkung des Leiters erfolgt auf die Seite mit dem geschwächten Magnetfeld. Wird nur die Stromrichtung vertauscht, so wechselt die Ablenkrichtung (Bild 1d folgende Seite). Vertauscht man hingegen sowohl die Stromrichtung als auch die Richtung des Polfeldes, so bleibt die Ablenkrichtung gleich (Bild 1e folgende Seite). Die Motortechnik Im Jahr 2016 werden von allen Herstellern nur noch sogenannte bürstenlose Gleichstrommotoren verbaut. Um jedoch die Funktionsweise von Elektromotoren grundsätzlich verstehen zu können, muss zunächst das Motorprinzip in allgemeiner Form eingeführt werden. Alle Erklärungen erfolgen nur qualitativ, d. h. es wird auf Berechnungsformeln vollständig verzichtet. Interessierte Schüler und Lehrer finden in den Blättern mit Zusatzaufgaben auch die zugehörigen Formeln und quantitative Aufgabenstellungen. Das Funktionsprinzip aller Elektromotoren, gleich welcher Bauart, beruht auf der magnetischen I N 𝛷 I F S Bild 1:Kraft auf einen stromdurchflossenen Leiter im Magnetfeld 300 4 Elektrotechnik Die Ablenkrichtung des Leiters lässt sich auch mit Hilfe der Linken-Hand-Regel (Motorregel) bestimmen (Bild 2). I St ro m ric ht un g N Linke-Hand-Regel: Hält man die linke Hand so, dass die magnetischen Feldlinien vom Nordpol kommend in die Handfläche treffen und die ausgestreckten Finger in die technische Stromrichtung zeigen, dann deutet der abgespreizte Daumen in die Ablenkrichtung. Magnetfeld ft Ablenkkra F Die Kraft, die diese Ablenkung bewirkt, ist die Kraft des Magnetfeldes auf Ladungsträger, die sich im Leiter bewegen. Sie wird Lorentzkraft genannt. S Bild 2: Linke-Hand-Regel (Motorregel) Alles verstanden? 1. G eben Sie an, auf welcher Wirkung des elektrischen Stroms grundsätzlich die Funktionsweise aller Arten von Elektromotoren beruht! S S ist offen! F 0,0 N N 2. E rläutern Sie, auf welche Weise das resultierende Magnetfeld von Leiter und Magnetpolen zustande kommt! l 3. B egründen Sie, warum die Ablenkrichtung des Leiters gleich bleibt, wenn man die Magnetpole und die Stromrichtung vertauscht! G Die stromdurchflossene Spule im Magnetfeld Polfeld + Leiterfeld (Dauermagnet) (Leiterstrom) N Befindet sich statt eines gestreckten Leiters eine Spule aus elektrisch leitendem Material in einem Magnetfeld, so lässt sich diese Spule in eine Drehbewegung versetzen. Damit ist das Grundprinzip eines Elektromotors vorhanden. Solange der Schalter S noch nicht geschlossen ist und deshalb kein Strom fließt, wirkt auch keine Kraft auf die Spule, weil außer dem Polfeld kein weiteres Magnetfeld vorhanden ist (Bild 3). N = a) Polfeld Bild 3: Stromlose Spule im Magnetfeld b) Leiterfeld S N F F S S Resultierendes Feld noch nicht vorhanden S = Resultierendes Feld N + S c) Resultierendes Feld Bild 1: Polfeld und Magnetfeld eines stromdurchflossenen Leiters S d) Umgekehrte Stromrichtung F N e) Pole und Stromrichtung vertauscht 4.3 Elektrotechnische Systeme 301 Schließt man den Schalter S (Bild 1a), so fließt ein Strom durch die Spule und es bildet sich um die Leiter der Spule ein weiteres Magnetfeld. Das resultierende Feld, das sich aufbaut, übt auf die Leiter der Spule Kräfte aus, welche die Spule um ihre Aufhängepunkte verdrehen. – S S ist geschlossen! F I 0,010 N N LeiterPolfeld feld (Dauer- + (Leitermagnet) strom) F F S Die Spule wird in eine Rotationsbewegung versetzt und mit dem Drehwinkel der Spule verändern sich sowohl der Betrag als auch die Richtung der Kräfte, die auf die Leiter der Spule wirken (Bild 1b). N l N G + S Beträgt die Auslenkung der Spule aus ihrer ursprünglichen Lage (Ruhelage) 90° (Bild 1c), so hat sich die Richtung der Kräfte so verändert, dass sie keine Rotationsbewegung mehr verursachen, sondern, je nach Stromrichtung, die Leiter nur noch versuchen auseinanderzuziehen oder zusammenzudrücken. In dieser Stellung bleibt die betrachtete Spule nach einem kurzen Einschwingvorgang stehen. S = Resultierendes Feld a) – S S ist geschlossen! F I N LeiterPolfeld feld (Dauer- + (Leitermagnet) strom) F l N S G + S S = Resultierendes Feld b) – S S ist geschlossen! F I Alles verstanden? G + c) LeiterPolfeld feld (Dauer- + (Leitermagnet) strom) 0,010 N N F F N S l 1. In Bild 1a sind Kraftpfeile eingezeichnet, die eine Kreisbewegung der Spule andeuten. Korrigieren Sie die Kraftrichtung, indem Sie eine eigene Skizze anfertigen und die Kraftpfeile so eintragen, dass sie in die tatsächliche Richtung zu diesem Zeitpunkt zeigen! 2. B egründen Sie, z. B. mit Hilfe einer Skizze, warum die Spule sich bei einem Rotationswinkel von 90° (Bild 1c) nicht mehr weiterdrehen kann! F N Das Prinzip des Gleichstrommotors mit Stromwender, auch Kommutator genannt, beruht darauf, dass man genau zu diesem Zeitpunkt die Richtung des Stromes umpolt. Durch die Massenträgheit der Spule schwingt sie über den 90°-Winkel hinaus und die nun veränderte Stromrichtung kehrt auch die Richtung der Magnetfelder um die Spulenleiter um. Die Folge ist, dass die Spule sich ständig weiter dreht. 0,010 N N S S = Resultierendes Feld Bild 1a bis 1c: K räfte auf eine stromdurchflossene Leiterschleife im Magnetfeld 302 Der Gleichstrommotor mit Stromwender (Kommutator) Ein mechanischer Kommutator besteht aus zwei elektrisch voneinander isolierten Schleifringhälften, die auf der Rotationsachse der Leiterschleife angebracht sind. Die Stromzufuhr erfolgt über sogenannte Kohlebürsten (Bild 1a). Dreht sich die Leiterschleife in die horizontale Lage, so werden wie bereits gezeigt, die Kräfte in Rotationsrichtung zu Null. Aufgrund der Massenträgheit dreht sich die Leiterschleife jedoch ein kleines Stück weiter. In diesem Moment berühren die Kohlebürsten die andere Hälfte des Schleifrings und drehen die Stromrichtung durch die Leiterschleife um. Dadurch wirken die Kräfte weiter in Drehrichtung und die Leiterschleife dreht sich weiter. In der Praxis ist ein Motor, dessen Rotor, bei Gleichstrommotoren auch Anker genannt, nur aus einer Leiterschleife besteht jedoch aus mehreren Gründen nicht sinnvoll. Zum einen wäre das Drehmoment eines solchen Motors sehr gering, da dies direkt von der Anzahl der Leiterschleifen abhängt. Zum anderen würde dieses ohnehin schon geringe Drehmoment bei jedem Umlauf zweimal den Wert Null annehmen. Um das Drehmoment zu erhöhen und während eines Umlaufs möglichst gleichmäßig zu halten, verteilt man viele zusammengeschaltete Wicklungen gleichmäßig auf den Anker (Bild 1b). 4 Elektrotechnik Der bürstenlose Gleichstrommotor Der Standardantrieb von Pedelecs ist der sogenannte bürstenlose Gleichstrommotor. Dieser hat einen hohen Wirkungsgrad von bis zu 90 % und ist im Betrieb nahezu verschleißfrei, da er keinen mechanischen Kommutator besitzt. Für diese Motorbauart werden verschiedene Bezeichnungen verwendet. Eine davon ist EC-Motor, wobei das EC für Electronically Commutated steht, eine andere ist BLDC-Motor für BrushLess-Direct-Current-Motor. Im Folgenden wird in diesem Buch der Begriff EC-Motor verwendet. Die Bezeichnung EC-Motor weist schon darauf hin, dass die Stromwendung durch einen elektronischen Kommutator durchgeführt wird. Dadurch ist das Konstruktionsprinzip des mechanisch kommutierten Motors umgekehrt. Die stromdurchflossenen Spulen sind auf dem Stator angebracht und damit feststehend, während der Rotor mit Neodym1-Dauermagneten bestückt ist (Bild 1, folgende Seite). Dabei unterscheidet man zwei verschiedene Konstruktionsprinzipien: 1 Die z. Z. stärksten Magnete werden aus einer Legierung aus Neodym, Eisen und Bor hergestellt. Chem. Formel: Nd2Fe14B Stromwenderlamellen (Schleifringhälften) N Anker I Bild 2 zeigt einen aufgeschnittenen Gleichstrommotor mit mechanischem Stromwender. Die Kohlebürsten, die im Betrieb ständig über die Lamellen des Kommutators gleiten, sind Verschleißteile. Sie müssen deshalb regelmäßig kontrolliert und ausgetauscht werden. Wichtige Anmerkung: Beim Betrieb eines Gleichstrommotors treten viele weitere physikalische Phänomene auf, z. B. Induktion einer Ankergegenspannung, die wiederum einen Ankerstrom bewirkt, der ein Ankerquerfeld verursacht, was wiederum zur sogenannten Ankerrückwirkung führt. Auch gibt es viele verschiedene Möglichkeiten das Erregerfeld (Polfeld) zu erzeugen, was wiederum Einfluss hat auf die Drehmomentkennlinie eines Motors. All diese Phänomene werden hier nicht weiter behandelt! N n n I S Kohlebürste S Magnetpol des Ständers L– L+ a) Prinzip mit Leiterschleife b) mit Ankerwicklung Bild 1: Leiterschleife und Ankerwicklung Läufer Stromwender Alles verstanden? 1. B eschreiben Sie den Aufbau und die Funktionsweise eines mechanischen Stromwenders! 2. B egründen Sie, warum es günstig ist, dass man beim Anker eines Gleichstrommotors viele Windungen gleichmäßig auf den gesamten Ankerumfang verteilt! Lüfter Klemmenkasten mit Klemmbrett Bild 2: Gleichstrommotor mit Stromwender Bürstenhalterung 4.3 Elektrotechnische Systeme 303 ▪▪ Außenläufer (Bild 1) Der Stator mit den Spulen ruht innen fest auf der Achse und die Dauermagneten auf dem Rotor sitzen außen und umschließen den Stator. fließt, denn die dritte Phase ist von der Stromquelle getrennt. In den beiden angesteuerten Phasen fließt der Strom natürlich immer vom highSignal zum low-Signal oder mit anderen Worten, er fließt immer vom Pluspol zur Masse. ▪▪ Innenläufer Der Stator mit den Spulen sitzt außen fest im Gehäuse und die Dauermagneten sind auf dem innenliegenden Rotor befestigt. Stator mit Kupferwicklungen Unabhängig von diesem Konstruktionsprinzip benötigt der EC-Motor eine elektronische Steuerschaltung, welche die Kommutierung durchführt. Diese Steuerschaltung ist Teil des Controllers und sorgt dafür, dass die Spulen im Stator so angesteuert werden, dass ein rotierendes Magnetfeld entsteht. Dieses umlaufende Magnetfeld zwingt die am Rotor befestigten Dauermagneten durch die magnetischen Kräfte ihm zu folgen. Die Gleichspannung, die der Akku liefert, wird zu diesem Zweck in eine pulsierende Rechteckspannung umgeformt. Damit werden die Spulen zu verschiedenen Zeitpunkten mit unterschiedlichen Strömen versorgt, denn die notwendige Stromrichtung ist davon abhängig, in welchem Winkel eine Wicklung gerade zu den Magnetfeldern der Dauermagneten ausgerichtet ist. ControllerElektronik Rotor mit Neodym-Magneten Bild 1: Geöffneter EC-Motor von BionX (Außenläufer) U high floating low high Phase B Bild 3 zeigt schematisch, dass am Umfang des Stators sechs Spulen angeordnet sind. Die zwei jeweils gegenüberliegenden Spulen sind in Reihe geschaltet und bilden eine Phase. Eine Seite dieser Spulenpaare ist im Inneren des Motors zusammengeschaltet, so dass sich hier alle drei Phasen sternförmig treffen. Dieser Punkt heißt Sternpunkt und ist in der schematischen Darstellung von Bild 3 mit com bezeichnet. floating Phase C Phase A = floating Zustand floating low high low 1 2 3 4 5 6 1 2 3 Das andere Spulenende wird jeweils als An1 Zyklus schluss herausgeführt, so dass es für jede der t drei Phasen einen Anschluss gibt, die nach dem in Bild 2 dargestellten Ablauf angesteuert werden. Bild 2: Ansteuerung der drei Phasen eines EC-Motors Ein vollständiger Zyklus besteht aus sechs Teilzyklen und dabei gelVerschaltung ten folgende Regeln: der Wicklungen A com se C B Pha C N Das bedeutet, dass immer nur durch genau zwei Phasen Strom a b S → low-Signal com a b → floating ▪▪ Eine Phase liegt auf Masse S S ▪▪ E ine Phase hat keine Verbindung, d. h. das Signal ist undefiniert c N N → high-Signal A Phase A ▪▪ A n einer Phase liegt die Nennspannung an a N S c c com b C com Pha se B Bild 3:Schematische Darstellung der Verschaltung der Wicklungen B 304 4 Elektrotechnik Um den Umlaufsinn des entstehenden Magnetfeldes zu verdeutlichen, ist in den Bildern 1 bis 3 der Rotor vereinfacht als Magnetnadel im Innern der Spulen dargestellt, also das Prinzip eines Innenläufers. Beschreibung der Vorgänge im ersten Teilzyklus: c A com a N S b a B C N S a 1 b N S Somit ergibt sich ein Strompfad durch die Spulen von Anschluss A zu Anschluss C: A → a → com → c → C S com Phase C: low-Signal N N Phase B: floating A S Bild 2 vorherige Seite zeigt, dass die Spannungen wie folgt anliegen: Phase A: high-Signal c com C c b B Bild 1: Stromfluss und Magnetfeld in Teilzyklus 1 Das dadurch entstehende Magnetfeld richtet den Rotor aus wie in Bild 1 dargestellt. Jetzt erfolgt die Kommutierung, das System befindet sich im Teilzyklus 2. N Es ergibt sich jetzt der Strompfad von Anschluss B zu Anschluss C: B – b – com – c – C com a com a N S b b C N Phase C: low-Signal S S Phase B: high-Signal c A N S Bild 2 auf der vorherigen Seite zeigt, dass die Spannungen nun wie folgt anliegen: Phase A: floating A a B N S c c b C com B 2 Bild 2: Stromfluss und Magnetfeld in Teilzyklus 2 Das durch den Stator erzeugte Magnetfeld hat sich um 60° im Gegenuhrzeigersinn gedreht. Der Rotor folgt dieser Änderung und erreicht schließlich die Ausrichtung, die in Bild 2 zu sehen ist. Es erfolgt erneut eine Kommutierung und das System befindet sich im Teilzyklus 3. N com a b N S Es ergibt sich jetzt der Strompfad von Anschluss B zu Anschluss A: B – b – com – a – A A com a b B a N S 3 C N Phase C: floating S S Phase B: high-Signal c N S Bild 2 auf der vorherigen Seite zeigt, dass die Spannungen nun wie folgt anliegen: Phase A: low-Signal A c com c C b B Bild 3: Stromfluss und Magnetfeld in Teilzyklus 3 Das Magnetfeld hat sich um weitere 60° gedreht, der Rotor ist dieser Rotation gefolgt und steht nun auf der Stellung, die Bild 3 zeigt. 4.3 Elektrotechnische Systeme Auf die gleiche Weise folgen weitere drei Teilzyklen, bis das Magnetfeld des Stators schließlich eine komplette Umdrehung durchlaufen hat. Mit dem umlaufenden Magnetfeld wird auch der Rotor um 360° verdreht. Nach 6 Teilzyklen wiederholt sich der ganze Ablauf, so dass auf diese Weise eine kontinuierliche Drehbewegung des Rotors entsteht. Anmerkung: In Wirklichkeit richtet sich der Rotor nicht genau zum Magnetfeld des Stators aus, sondern er „hinkt“ diesem um 90° versetzt nach, denn in dieser Position wirkt das maximale Drehmoment auf den Rotor. Es wurde in diesem Abschnitt schon gezeigt, dass die Kraft dann maximal ist, wenn die beiden Magnetfelder senkrecht zueinander stehen. Die am Rotor angreifende Kraft ist direkt proportional zum Sinus des Winkels zwischen den Magnetfeldern und somit bei einem Winkel von 90° am stärksten. Der bürstenlose Motor (EC-Motor) wird deshalb in Pedelecs verwendet, weil er einige Vorteile gegenüber dem herkömmlichen Motor mit mechanischem Kommutator hat, die vor allem beim Einsatz in Pedelecs sehr wichtig sind: 305 Der Controller Um die Funktionsweise des EC-Motors vollständig verstehen zu können, muss jetzt allerdings noch die Frage geklärt werden, auf welche Weise das System erkennt, wann der richtige Zeitpunkt gekommen ist, die Kommutierung durchzuführen. Dies ist nicht ganz einfach, denn dazu müssen wir einen Teil der elektronischen Schaltung des Controllers genauer betrachten. Zur Ermittlung des optimalen Kommutierungszeitpunktes, benötigt das System die folgenden zwei Steuersignale (Bild 1): ▪▪ Drehzahlsensor ▪▪ Lagesensor (Drehwinkel) Beide Steuersignale, die aktuelle Drehzahl und der momentane Drehwinkel des Rotors, werden auf den Controller übertragen. Dieser wertet die Signale aus und sorgt dafür, dass jede Wicklung zum genau richtigen Zeitpunkt den richtig gepolten Magnetisierungsstrom erhält. Der Controller muss folglich eine digitale Logikschaltung enthalten, die die Steuersignale auswertet und in Abhängigkeit von dieser Auswertung das Kommutierungssignal auf eine Endstufe überträgt. ▪▪ E r hat einen höheren Wirkungsgrad, da die ReiDie Steuerschaltung enthält für jede Phase ein bung der Kohlebürsten und das sogenannte Transistorpaar, insgesamt also sechs Transistoren Bürstenfeuer entfallen! T1 bis T6. In jedem der drei Transistorpaare ist ein ▪▪ Er läuft nahezu völlig geräuschlos! Transistor dafür zuständig, die jeweilige Phase ▪▪ Er ermöglicht höhere Leistungen und Drehmo- auf die Betriebsspannung zu schalten (T1, T3, T5). Der zweite Transistor setzt bei Bedarf die jeweilige mente bei kleinerer und leichterer Bauweise! Phase auf Masse (T2, T4, T6). Wenn keiner der bei▪▪ Er ist bis auf die Wälzlager des Rotors vollstän- den Transistoren eingeschaltet ist, hat die Spandig wartungsfrei! nung an dieser Phase keinen definierten Wert, sie ist „frei schwebend“ (floatend). Die Logikschaltung muss außerdem dafür sorgen, dass niemals Alles verstanden? beide Transistoren einer Phase eingeschaltet sind, 1. Geben Sie die verschiedenen Bezeichnungen des denn dies würde zu einem Kurzschluss führen. bürstenlosen Gleichstrommotors und deren Bedeutung an! T1 2. E rklären Sie den Unterschied zwischen einem Außenläufer und einem Innenläufer! 3. B eschreiben Sie, was man bezogen auf einen ECMotor unter einer Phase versteht und wie eine solche Phase zustande kommt! 4. F assen Sie die Vorteile des EC-Motors gegenüber dem klassischen Gleichstrommotor mit mechanischer Kommutierung zusammen! Arbeitsauftrag 1. Erläutern Sie mit Hilfe einer Skizze, die Vorgänge im Teilzyklus 4! Gehen Sie dabei auf die Spannungen an den Phasen, den dadurch entstehenden Strompfad und auf die Ausrichtung des zugehörigen Stator-Magnetfeldes ein! T3 Steuerschaltung T5 Motor A G B C T2 T4 T6 Elektronischer Kommutator mit Drehzahlregler und Steuerlogik (Controller) Steuersignal vom Drehzahlsensor Steuersignal vom Lagesensor Bild 1:Prinzipschaltung eines EC-Motors mit Steuerschaltung der Kommutierung 306 Der Controller (Bild 1) eines Pedelecs hat allerdings neben der elektronischen Kommutierung noch eine ganze Reihe weiterer Aufgaben. Unter anderem ist er dafür zuständig, ▪▪ d en Motorbetrieb zu überwachen und dem Benutzer auf dem Display stets alle wichtigen Informationen anzuzeigen. ▪▪ d afür zu sorgen, dass der Motor aus dem Stand, d. h. wenn der Drehzahlgeber noch kein Signal liefert, mit einer komfortablen Drehmomentkennlinie hochfährt. ▪▪ in Abhängigkeit von der vorgegeben Einstellung durch den Fahrer, die „richtige“ Motorunterstützung zu liefern. ▪▪ d en Motor durch rechtzeitiges Drosseln der Leistung vor Überlastung zu schützen. ▪▪ d ie Motorunterstützung abzuschalten, wenn die für Pedelecs vom Gesetzgeber festgelegte Höchstgeschwindigkeit überschritten wird. ▪▪ w enn die verwendete Technik dies zulässt für eine angenehme Rekuperation zu sorgen. ▪▪ d ie Akkuspannung zu überwachen und die maximalen Stromstärken so zu begrenzen, so dass keine Bauteilschäden auftreten können. 4 Elektrotechnik Alles verstanden? 1. B eschreiben Sie, welche Steuersignale benötigt werden, damit die Spulen des Stators zur richtigen Zeit mit der richtig gepolten Stromrichtung versorgt werden! 2. E rläutern Sie die Vorgänge in der Steuerschaltung, wenn die Transistoren T3 und T4 beide gleichzeitig durchschalten! 3. F assen Sie alle Aufgaben zusammen, die der Controller eines Pedelecs zu erfüllen hat! Der Akkumulator Bei mobilen technischen Systemen, wie Smartphones, Notebooks und Tablets hängt die Alltagstauglichkeit von einer stabilen und ausdauernden Energieversorgung ab. Ganz besonders gilt dies bei Systemen der Elektromobilität, also bei Pedelecs und Elektro-Kfz, denn der Energiebedarf solcher Systeme ist um ein Vielfaches höher als bei Kommunikations- oder Datenverarbeitungssystemen. Der Durchbruch für Elektro-Fahrräder kam erst mit der Verbreitung der Lithium-Ionen-Akkus (Bild 1, folgende Seite). Für Elektro-Kfz könnte die nächste Generation der Akkutechnik den endgültigen Durchbruch bringen. ▪▪ im Fehlerspeicher alle aufgetretenen Fehler und Warnungen zu sammeln und auf diese Weise die Wartungsarbeiten zu vereinfachen. Zur Erledigung all dieser zusätzlichen Aufgaben, benötigt das System neben dem Drehzahlsensor und dem Lagesensor mindestens noch zwei weitere Sensoren, nämlich zur ständigen Messung folgender Größen: ▪▪ Aktuell anliegendes Drehmoment ▪▪ Aktuelle Beschleunigung Bild 1: Controller-Elektronik eines BionX-Motors In Bild 2 ist die Achse eines Pedelec Motors dargestellt, auf der die verschiedenen Sensoren angebracht sind. Die Controller aller modernen Pedelecs verfügen zudem über eine ProgrammierSchnittstelle, über die man dem System neue Parameter einprogrammieren kann, z. B. eine neue Drehzahl-Drehmoment-Kennlinie. Die vollständige Schaltung eines Pedelec-Controllers ist äußerst komplex und würde den Rahmen dieses Kapitels vollkommen sprengen, deshalb wird hier auf deren Darstellung verzichtet. Weitere Untersuchungen bieten sich jedoch für Gruppenprojekte und Referate an. Sensoren Sensoren Bild 2: Motorachse mit Sensoren 4.3 Elektrotechnische Systeme 307 Der Aufbau Der Entladevorgang Jede Art von Akkutechnik basiert auf der chemischen Wirkung des elektrischen Stromes. Bei Lithium-Ionen-Zellen besteht die Anode (=negativ geladene Elektrode) aus einer Lithium-GraphitVerbindung (allgemein: LixCn), wobei Lithium als positiv geladenes Ion (Kation) vorliegt. Die Kathode (= positiv geladen Elektrode) ist aus einem Lithium-Metalloxyd gefertigt, welches aus verschiedenen Metallkomponenten bestehen kann, z. B. Kobalt (LiCoO2), Nickel (LiNiO2) oder Mangan (LiMnO2) sein. Die Zusammensetzung hat Einfluss auf die Eigenschaften des Akkus, z. B. auf die Zellenspannung, die in Abhängig vom Elektrodenmaterial zwischen 3,6 und 3,8 Volt liegt. ▪▪ D ie Lithium-Graphit-Verbindung der Anode gibt Elektronen e− ab, die über den externen Stromkreis zur positiven Elektrode, zur Kathode, fließen. Bild 2 zeigt, dass zwischen den Elektroden ein Separator angeordnet ist, der häufig aus keramischem Material besteht. Dieser Separator hat zum einen die Aufgabe die Elektroden räumlich und elektrisch zu trennen und damit zu verhindern, dass es zum Kurzschluss kommt. Zum anderen muss er aber für die Li-Ionen durchlässig sein, damit diese die Umwandlung der gespeicherten chemischen Energie in elektrische Energie bewirken können. Als Materialien für Separatoren eignen sich beispielsweise Folien aus mikroporösen Kunststoffen sowie feine Vliese aus Glasfasern oder keramischen Materialien. Die gesamte Anordnung befindet sich in einem Elektrolyt. Da Lithium, das leichteste aller Metalle, sehr heftig mit Wasser reagiert, können als Elektrolyt ausschließlich wasserfreie Lösungen verwendet werden. Diese haben allerdings häufig den Nachteil, dass sie brennbar sind. Aufgrund dieser brennbaren Lösungsmittel kann es in Verbindung mit hohen Temperaturen unter bestimmten Umständen zu Akkubränden oder gar Explosionen kommen. Aufgrund der Vielzahl der möglichen Elektroden-, Separator- und Elektrolytmaterialien gibt es, selbst bei gleicher Nennspannung, nicht den einen Lithium-Ionen-Akku, sondern zahlreiche Varianten. ▪▪ G leichzeitig wandert die gleiche Anzahl von Li+Ionen innerhalb des Akkus ebenfalls von der Anode durch den Elektrolyten und den Separator zur Kathode. ▪▪ D ort werden die Elektronen e−, die über den externen Stromkreis kommen, nicht von den Lithium-Ionen aufgenommen, sondern von den dort vorhandenen Metallen des LithiumMetalloxids. Dies sind je nach Akkumulatortyp Cobalt-, Nickel- oder Mangan-Ionen, die dadurch natürlich auch ihre Ladung ändern. Bild 1: Li-Ionen-Gepäckträger-Akku + Separator – Al Cu Die Funktionsweise Man muss bei der Beschreibung der Funktionsweise eines Akkus zwei verschiedene Betriebszustände unterscheiden: ▪▪ E ntladevorgang, d. h. der Akku liefert elektrische Energie ▪▪ L adevorgang, d. h. der Akku bezieht elektrische Energie aus dem Stromnetz Kohlenstoff (Graphit) Metall (z. B. Mangan Mn) nicht-wässrige Elektrolytlösung Lithium Ladevorgang Sauerstoff Entladevorgang Bild 2: Aufbau eines Li-Ionen-Akkus 308 4 Elektrotechnik ▪▪ D as Lithium liegt auch im entladenen Zustand des Akkumulators in der positiven Elektrode weiterhin in Form von Kationen vor. Die Li+-Ionen haben eine geringe Größe und eine hohe Beweglichkeit, so dass sie sich sowohl in der Molekülstruktur der Graphitelektrode, als auch im Gitter der Kathode relativ frei bewegen können. ▪▪ A uch die Elektronen bewegen sich als Elektronengas frei in den Elektroden und können deshalb zu den externen Leitern wandern bzw. aus den Leitern in die Elektrode eintreten. Die elektrochemischen Vorgänge in einem Lithium-Ionen-Akkumulator mit einer Kathode aus einem Lithium-Mangan-Metalloxid lassen sich durch folgende Reaktionsgleichungen beschreiben: Negative Elektrode (Entladen): LixCn → Positive Elektrode (Entladen): Redox-Gleichung: Li1−x Mn2O4 + LixCn → → Die Energiedichte bei einem Akkumulator gibt an, wieviel elektrische Energie ein Akku pro kg Masse speichern kann. Die Definition lautet damit: Energiedichte = gespeicherte elektrische Energie Masse des Akkus In Formelschreibweise: w = Eel = m U∙𝛪∙t m Als Einheitengleichung: J [w ] = (in Basiseinheiten) kg Bei Akkumulatoren ist die Angabe der Energiedichte in den Basiseinheiten, also in J/kg, nicht üblich, sondern man verwendet hier gewöhnlich die Einheit Wh/kg. n C + x Li+ + x e− Li1−x Mn2O4 + x Li+ + x e− Energiedichte LiMn2O4 LiMn2O4 + Cn Der Ladevorgang Das Laden erfolgt durch das Strom-SpannungsLadeverfahren, d. h. es wird zuerst mit einem konstanten Strom und dann mit einer konstanten Spannung aufgeladen. ▪▪ D urch die außen angelegte Spannung werden die Li-Ionen zurückgeschoben in die Graphitstruktur der Anode. Die Umrechnung lautet: 1 Wh/kg = 3600 J/kg Die Kathode wirkt auf die Li+-Ionen wie ein Schwamm, d. h. sie kann eine große Zahl von LiIonen aufnehmen. Dies ist der Grund, warum LiIonen-Akkumulatoren die höchste Energiedichte von allen Akku-Typen haben. Der Hauptfaktor für die erreichbare Energiedichte ist das verwendete Kathodenmaterial. Die Tendenz in den 2010-er Jahren geht jedoch dahin, dass man die Energiedichte nicht bis zu den höchsten erreichbaren Werten von bis zu 240 Wh/kg ausreizt und statt dessen mehr Wert auf die Langlebigkeit legt, d. h. dass möglichst viele Lade-Entladezyklen erreicht werden. ▪▪ D ort lagern sie sich zwischen die Molekülebenen des Kohlenstoffs ein. Zur Steuerung der Spannungen beim Lade- und Entladevorgang hat jeder Lithium-Ionen-Akkupack eine eigene elektronische Überwachungsschaltung (Bild 1), die direkt am Akku angebracht ist. Diese kontrolliert während des gesamten Lade- und Entladevorgangs, dass die vom Hersteller angegebenen zulässigen Spannungen weder über- noch unterschritten werden. Sowohl zu hohe als auch zu niedrige Spannungen führen unweigerlich dazu, dass der Akku zerstört wird. Bei unzulässiger Handhabung kann es unter Umständen auch zum Akkubrand oder gar zur Explosion kommen. Bild 1:Elektronische Überwachungsschaltung am Li-Io-Akku 4.3 Elektrotechnische Systeme Spannung, Kapazität und Energieinhalt eines Akkupacks Die Zellenspannung einer Li-Ionen-Zelle liegt, wie schon erwähnt, je nach verwendetem Elektrodenmaterial zwischen 3,6 und 3,8 V. Zur Energieversorgung der verschiedenen mobilen Geräte benötigt man jedoch unterschiedliche Spannungen und Energievorräte. Deshalb werden von den Herstellern einzelne Zellen zu sogenannten Akkupacks zusammengeschaltet. Um die Konfiguration eines Akkupacks auszudrücken, verwendet man eine Kurzschreibweise, die die Anzahl der in Serie (in Reihe) geschalteten Zellen und die Anzahl der dazu parallel geschalteten Zellen ausdrückt. So steckt in der Angabe 5s2pKonfiguration folgende Information: ▪▪ Es sind 5 Pakete in Serie (= in Reihe) geschaltet ▪▪ Jedes Paket enthält 2 parallel geschaltete Zellen Durch die Zusammenschaltung von einzelnen Zellen kann man verschiedene Parameter des Akkupacks an die Anforderungen des jeweiligen Systems anpassen. ▪▪ R eihenschaltung von Zellen zur Erhöhung der Nennspannung ▪▪ P arallelschaltung von Zellen zur Erhöhung der Kapazität und des Energieinhalts Die Nennspannung des Akkupacks UNP ergibt sich aus der Anzahl nS der in Reihe geschalteten Zellen multipliziert mit der Nennspannung einer Zelle UNZ. UNP = n S ∙ UNZ Die Kapazität eines Akkupacks CP wird bestimmt durch die Anzahl der parallel geschalteten Zellen multipliziert mit der Kapazität CZ einer Zelle. Die Kapazität hat die Einheit Ah und gibt an, welche Stromstärke für welche Zeitspanne entnommen werden kann. 309 In Bild 1 ist das vereinfachte Schaltbild einer 5s2pKonfiguration dargestellt, also 5 Pakete in Serie mit jeweils 2 parallel geschalteten Zellen. Berechnungsbeispiel für einen Akkupack Wir betrachten einen Lithium-Ionen-Akkupack in 10s3p-Konfiguration. Die Zellen, aus denen der Akkupack aufgebaut ist, haben folgende Nenndaten: Nennspannung: UNZ = 3,7 V; Nennkapazität: KNZ = 2,5 Ah Lösung: Die Berechnung der Daten des Akkupacks ergibt folgende Werte: Nennspannung: U N = n S ∙ U NZ = 10 ∙ 3,7 V = 37 V Nennkapazität: K N = n P ∙ K NZ = 3 ∙ 2,5 Ah = 7,5 Ah Energieinhalt: E N = U N ∙ K N = 37 V ∙ 7,5 Ah E N = 277,5 VAh = 2,8 ∙ 10 2 Wh In Tabelle 1 werden die technischen Daten von typischen Lithium-Ionen-Akkupacks für verschiedene Anwendungen verglichen: Tabelle 1: T ypische Daten von Akkupacks (Stand: 2016) Technisches System Spannung U in V Energie- Masse m inhalt Eel in Wh in kg Smartphone (z. B. Samsung Galaxy) 3,8 9,0 0,060 Tablet (z. B. MS Surface) 7,6 42,2 0,320 Laptop (z. B. Acer Aspire) 14,8 71,0 0,640 Pedelec (z. B. Bosch Power Pack) 36 400 2,80 Elektro-Kfz (z. B. BMW i3) 360 33000 255 CP = n P ∙ C Z Power 2 Der Energieinhalt des gesamten Akkupacks EP ergibt sich aus der Multiplikation der Nennspannung mit der Kapazität. EP = UNP ∙ C P Wichtig: Die Kapazität eines Akkumulators ist nicht identisch mit der Kapazität eines Kondensators. Die Einheiten beider Größen unterscheiden sich wie folgt: Kondensator: [C] = As/V = F Akkumulator: [C] = Ah = 3,6 ∙ 10 3 As Power 1 G1 – – G2 G3 + – + – G4 G5 + – + – G6 G7 G9 + – + – + + – + – + G8 G10 Bild 1:Schaltbild eines Akkupacks mit 5s2pKonfiguration 310 4 Elektrotechnik Nutzungsdauer und Alterungsprozess Die meisten Qualitätshersteller garantieren, dass der Li-Io-Akku mindestens fünfhundert Lade-Entladezyklen durchhält. Dies entspricht allerdings noch nicht einmal einer Nutzungsdauer von eineinhalb Jahren, wenn eine Person ihr Pedelec täglich benutzt. Aber auch ohne tägliches Aufladen lässt sich der Alterungsprozess von Lithium-Ionen-Akkus nicht aufhalten, denn dieser wird durch Zell-Oxidation hervorgerufen. Dabei oxidieren die Elektroden und verlieren die Fähigkeit LithiumIonen zu speichern. Die Zell-Oxidation hängt von verschiedenen Faktoren ab, u. a. von der Temperatur und dem Ladezustand des Akkus. Bei hoher Temperatur und vollgeladenem Akku verläuft die Zell-Oxidation besonders schnell. Dieser Zustand kommt bei Notebooks häufig vor, wenn der Akku vollständig geladen ist und trotzdem im betriebswarmen Gerät eingesetzt ist. Wird ein Lithium-Ionen-Akku längere Zeit nicht benötigt, so sollte man folgende Lagerungstipps beachten: ▪▪ Auf 50 – 70 % der Maximalkapazität aufladen! ▪▪ An einem kühlen und trockenen Platz lagern! ▪▪ A lle 3 Monate den Ladezustand kontrollieren und bei Bedarf nachladen! Beachtet man diese Tipps, dann ist Selbstentladung von 1 % pro Monat relativ gering. Absolut wichtig ist es, eine Tiefentladung zu vermeiden, denn unterhalb einer Zellenspannung von 2 V ist der Akku irreparabel zerstört. Alles verstanden? 1. G eben Sie an, welche Materialien für die Kathode eines Li-Ionen-Akkus verwendet werden! 2. Beschreiben Sie die Aufgabe des Separators! 3. S kizzieren Sie den Aufbau eines Li-Ionen-Akkus und geben Sie die Reaktionsgleichungen an! 4. B egründen Sie, warum zur Lade- und Entladekontrolle jeder Li-Ionen-Akku eine Überwachungsschaltung benötigt! 5. E rläutern Sie, durch welche Maßnahmen die ZellOxidation verlangsamt werden kann! Arbeitsauftrag 1. Analysieren Sie die Daten des in Tabelle 1 auf vor- heriger Seite angegebenen Akkupacks für das MS Surface-Tablet und ermitteln Sie daraus die wahrscheinliche Zellen-Konfiguration! 2. Berechnen Sie die Energiedichten der in der Tabelle zusammengestellten Akkus! 4.3.3Aufgaben zu elektrotechnischen Systemen 1.Untersuchen Sie das technische System Pedelec im Hinblick auf seine Tauglichkeit und seinen Nutzen als individuelles Nahverkehrsmittel auf seine Vor- und Nachteile! Stellen Sie dabei wirtschaftliche, ökologische und individuelle Aspekte (Zeitfaktor, Gesundheit, Fitness, …) in einem Vergleich der Nutzung eines Mittelklasse-Kfz und des öffentlichen PersonenNahverkehrs ÖPNV gegenüber! 2.Es ist eine Auswahl von verschiedenen elektrotechnischen Systemen gegeben: • Arbeitsbeleuchtung, z. B. Schreibtischlampe • Küchengeräte, z. B. Elektroherd, Spülmaschine • Waschmaschine oder Wäschetrockner •Handbohrmaschine •Staubsauger • Anlasser eines Dieselmotor-Kfz • Lichtmaschine eines Ottomotor-Kfz •Photovoltaikanlage •Windkraftanlage 2.1Wählen Sie eines dieser elektrotechnischen Systeme aus, und analysieren Sie es in folgenden Arbeitsschritten: • Stellen Sie das ausgewählte System als Black-Box dar, klassifizieren Sie es nach seiner Hauptfunktion und tragen Sie das Haupt-Umsatzprodukt als Eingangs- und Ausgangsgröße ein. • Analysieren Sie den inneren Aufbau des gewählten Systems und gliedern Sie es in seine Haupt-Funktionsgruppen (Subsysteme). Beschränken Sie sich dabei zunächst auf maximal 3 bis 4 Subsysteme! •Erläutern Sie die Funktionsweise des Systems und seiner Subsysteme! • Beschreiben Sie die technische Realisierung von einzelnen, exemplarisch ausgewählten Komponenten! 2.2Untersuchen Sie, wie sich das von Ihnen ausgewählte System in den letzten drei Jahrzenten weiterentwickelt und verändert hat! Gehen Sie dabei auf folgende Veränderungen ein: •Technische Aspekte wie z. B. Aufbau, Funktionsprinzip, Effektivität, Qualität, … •Wirtschaftliche Aspekte wie z. B. Preisentwicklung, Nutzungsdauer, … • Ökologische Aspekte wie z. B. Umweltwirkungen, Energieverbrauch, … 4.4 Die Vielfalt der Elektrotechnik 4.4 Die Vielfalt der Elektrotechnik Die aus der geschichtlichen Entwicklung stammende Einteilung in Starkstrom- und Schwachstromtechnik ist längst überholt, denn die Elektrotechnik ist in alle Bereiche des täglichen Lebens vorgedrungen. Im Motor einer Waschmaschine steckt sie ebenso wie im Mikrochip eines Computers, in der Steuerung eines Roboters, im Prozessor eines Smartphones oder in den unzähligen Assistenzsystemen eines modernen Kraftfahrzeugs. Auch klassische Industrieprodukte, wie z. B. Werkzeugmaschinen und Produktionsanlagen enthalten zahlreiche elektrotechnische und elektronische Komponenten. Ebenso vielfältig wie die Anwendungen der Elektrotechnik sind die Technikbereiche, auf die sich Elektroingenieure spezialisieren können. Kein Ingenieur ist in der Lage, alle Bereiche gleichermaßen zu beherrschen, man muss sich schon im Studium auf wenige Bereiche spezialisieren. Dies gilt bereits im Bachelor-Studium, Bachelor of Science (B.Sc.) oder Bachelor of Engineering (B.Eng.) und ganz besonders, wenn man ein weiterführendes Studium mit dem Abschluss Master of Science (M.Sc.) oder Master of Engineering (M.Eng.) absolviert. 311 Forschung und Entwicklung Innovationen, d. h. neue Ideen, Produkte und technische Lösungen haben gerade in Deutschland einen besonders hohen Stellenwert. Aber es ist keine Innovation ohne Forschung möglich. Deshalb arbeiten Ingenieure in der Grundlagenforschung und bei der Weiterentwicklung und Optimierung bestehender Lösungen, z. B. beim ZAE Bayern (Bild 1), d.h. beim Zentrum für angewandte Energieforschung. In diesem bayerischen Forschungszentrum mit Standorten in Garching bei München, Erlangen, Nürnberg, Würzburg und Hof arbeiten Ingenieure und Wissenschaftler an innovativen Lösungen im Bereich der Energietechnik (Bild 2). Konstruktion Konstruktionsingenieure sind am kompletten Prozess von der Idee bis zur technischen Umsetzung beteiligt. Dabei ist nicht nur Kreativität und Teamfähigkeit gefragt, sondern auch der versierte Umgang mit hochkomplexen Softwaresystemen wie Produktdatenmanagement (PDM), ProductLifecycle-Management (PLM) sowie mit CAD- und CAE-Programmen. Einige Technikbereiche, auf die man sich auch schon während eines Studiums schwerpunktmäßig spezialisieren kann, sind unter anderem: ▪▪ Elektrische Energietechnik ▪▪ Elektrische Maschinen und Leistungselektronik ▪▪ Software Engineering und Technische Informatik ▪▪ Optik, Lasertechnik und Elektrochemie ▪▪ Informations- und Kommunikationstechnik ▪▪ A utomatisierungstechnik, Steuerungs- und Regelungstechnik ▪▪ Mikroelektronik und Schaltungstechnik ▪▪ … In jedem der oben genannten Technikbereiche existieren zusätzlich noch eine ganze Reihe von verschiedenen Tätigkeitsfeldern, auf die sich Ingenieure im Laufe ihrer Ausbildung und ihres Berufslebens spezialisieren können. 4.4.1 Die Tätigkeitsfelder von Ingenieuren Die Bandbreite der verschiedenen Tätigkeitsfelder von Ingenieuren aller Fachrichtungen ist enorm. Sie forschen, entwickeln, analysieren, konstruieren, programmieren, produzieren, beraten, prüfen und verkaufen die verschiedensten Produkte und Dienstleistungen. Einige dieser Tätigkeitsfelder werden im Folgenden erläutert. Bild 1: Logo des ZAE Bayern Photovoltaik Nanomaterialien Energiespeicher Energieoptimierte Gebäude Energieeffiziente Prozesse Systemtechnische Modellierung Thermophysik und Sensorik Bild 2: Forschungsbereiche das ZAE Bayern 312 Montage und Inbetriebnahme Ingenieure, die auf diesem Tätigkeitsfeld arbeiten, sind für den Aufbau und die fristgerechte Inbetriebnahme von Maschinen und Anlagen verantwortlich. Technischer Service und Kundendienst Ingenieure im Kundendienst oder Servicebereich sind verantwortlich für die vertraglich zugesicherte Verfügbarkeit von Maschinen, Anlagen oder auch Software. Häufig führen sie ein Team von Servicetechnikern, mit dem sie Instandhaltungsdienste oder Störungsfälle termingerecht und zur Zufriedenheit des Kunden ausführen (Bild 2). Einkauf Im Zeitalter der Globalisierung und weltweiter Märkte werden Ingenieure immer mehr in die Optimierung des Einkaufs von Unternehmen eingebunden. Alles verstanden? 1. G eben Sie mindestens drei Technikbereiche der Elektrotechnik an, die man schwerpunktmäßig vertieft studieren kann! 2. B eschreiben Sie die Aufgaben eines Ingenieurs, der sich auf das Tätigkeitsfeld des technischen Service spezialisiert hat! 3. W elches der genannten Tätigkeitsfelder eines Ingenieurs spricht Sie besonders an? Begründen Sie Ihre Auswahl! 4.4.2Die Arbeitsbereiche der Elektrotechnik Durch die weite Verbreitung der Elektrotechnik und Elektronik ist auch die Vielfalt der verschiedenen Arbeitsbereiche von Elektroingenieuren nahezu grenzenlos. Da es den Umfang dieses Buches sprengen würde, die Gesamtheit der Elektrotechnik vorzustellen, werden im Folgenden einige Technikbereiche exemplarisch ausgewählt und dargestellt. Elektrische Energietechnik Eine zentrale Aufgabe der elektrischen Energietechnik ist es, das ganze Land zuverlässig und stabil mit elektrischer Energie zu versorgen. Elektrische Energie, umgangssprachlich auch Strom © Robert Bosch GmbH Produktion und Instandhaltung Diese Ingenieure planen und überwachen die gesamte Produktion eines Produkts und die Einhaltung von ökonomischen, qualitativen, sicherheitstechnischen, ergonomischen und ökologischen Vorgaben (Bild 1). 4 Elektrotechnik Marketing und Vertrieb Produkte müssen nicht nur entwickelt, sondern auch verkauft werden. Dabei ist es sehr nützlich, wenn der Verkäufer nicht nur die Märkte und Vermarktungsstrategien kennt, sondern auch technisch kompetent ist. Der Vertriebsingenieur ist außerdem Repräsentant des Unternehmens und der wichtigste Ansprechpartner für den Kunden. Bild 1: Sichtprüfung eines Halbleiterwafers freundlich geduldig Produkt- und Projektmanagement (Systems Engineering) sachkundig pünktlich Produkt- und Projektmanager sind bei einer Produktentwicklung für die Einhaltung des Zeitplans und des Budgets verantwortlich. Um dies zu erreichen, müssen sie mit diplomatischem Geschick ihr Entwicklungsteam führen und ihre Mitarbeiter motivieren. Auf all diesen Tätigkeitsfeldern sind Ingenieurinnen und Ingenieure der Elektro- und Informationstechnik gesuchte Fach- und Führungskräfte mit exzellenten Berufsaussichten. korrekt höflich ordentlich Kunde Bild 2: Technischer Service und Kundendienst 4.4 Die Vielfalt der Elektrotechnik oder Elektrizität genannt, muss erzeugt und mittels Hochspannungsverbundnetzen übertragen und verteilt werden. Dabei wird mit Hochspannungen von bis zu 400 Kilovolt (kV) gearbeitet, bei künftigen Hochspannungs-Gleichstrom-Übertragungen (HGÜ) sogar bis zu 800 kV und es werden große bis sehr große Leistungen übertragen, die im Bereich von Megawatt (MW) oder sogar Gigawatt (GW) liegen. Energiewandler Kraftwerke Im Bereich der Energieversorgung sprechen nicht nur Laien, sondern auch Ingenieure und andere Fachleute, von der „Erzeugung elektrischer Energie“. Wörtlich genommen ist dieser Begriff falsch, denn jeder der den Satz von der Erhaltung der Energie kennt weiß: Energie kann nicht erzeugt oder vernichtet werden, sie kann nur in andere Energieformen umgewandelt werden. Dies gilt natürlich auch für elektrische Energie, die in Kraftwerken durch die Umwandlung aus anderen Energieformen entsteht. Jedes beliebige Kraftwerk lässt sich somit als ein technisches System betrachten, bei dem eine bestimmte Energieform am Eingang in elektrische Energie am Ausgang umgewandelt wird. In allgemeiner Form als Black-Box dargestellt sieht also jedes beliebige Kraftwerk wie folgt aus (Bild 1): Während des gesamten 20. Jahrhunderts beruhte die Energieversorgung im Wesentlichen auf Großkraftwerken, die mit fossilen Energieträgern und mit Wasserkraft betrieben wurden. Ab den 1970er Jahren kamen die Kernkraftwerke dazu, in denen die Kernbindungsenergie von Uran 235 und Plutonium in elektrische Energie umgewandelt wird. Die klassischen Kraftwerksarten sind also: ▪▪ Braunkohle- und Steinkohlekraftwerke 313 Während Laufwasserkraftwerke zu den sogenannten Grundlastkraftwerken zählen, dienen die Speicher- und Pumpspeicherkraftwerke zur Abdeckung der Lastspitzen. Die Erzeugung und Verteilung elektrischer Energie befindet sich seit Beginn des 21. Jahrhunderts in einem beispiellosen Umbruch, denn der Anteil von kleineren und dezentralen Kraftwerken, die von regenerativen Energiequellen gespeist werden, steigt sehr schnell. Es handelt sich dabei um folgende Kraftwerksarten: ▪▪ W indenergieanlagen (WEA), auch als Windkraftanlagen (WKA) bezeichnet, nutzen die kinetische Energie Ekin des Windes. ▪▪ P hotovoltaikanlagen (PVA) nutzen die Strahlungsenergie Estr der Sonne. ▪▪ B iogasanlagen nutzen die gespeicherte chemische Energie von Biomasse. ▪▪ Geothermieanlagen nutzen die Erdwärme. Eingangsenergie Elektrische Energie Technisches System Kraftwerk Bild 1:Allgemeine Darstellung eines technischen Systems Kraftwerk als Black-Box Chemische Energie Ech Elektrische Energie Eel Technisches System Braunkohlekraftwerk Bild 2: Braunkohlekraftwerk als Black-Box ▪▪ Erdgas- und Mineralölkraftwerke ▪▪ Kernkraftwerke ▪▪ Wasserkraftwerke In Bild 2 ist als Beispiel das technische System Braunkohlekraftwerk als Black-Box dargestellt. Wasserstrom Bei den Wasserkraftwerken unterscheidet man nach ihrem Einsatzbereich mehrere unterschiedliche Arten. Gemeinsam ist aber allen, dass sie die potentielle Energie Epot des aufgestauten Wassers in elektrische Energie Eel umwandeln. Man unterscheidet: ▪▪ Laufwasserkraftwerke Kraftwerk T G Turbine Generator ▪▪ Speicherkraftwerke (Bild 3) ▪▪ Pumpspeicherkraftwerke Bild 3: Prinzip eines Speicherkraftwerkes 314 Auch sogenannte Blockheizkraftwerke (BHKW) haben in den letzten Jahren einen stetig steigenden Anteil an der Energieversorgung. Der Vorteil gegenüber den klassischen Wärmekraftwerken ist der, dass mit ihnen sowohl elektrische Energie als auch Wärmeenergie erzeugt wird. Dadurch wird der Energieinhalt des Brennstoffes effektiver genutzt und die Verluste werden verringert. BHKW können mit verschiedensten Energieträgern betrieben werden, z. B. mit fossilen Brennstoffen wie Erdgas, Öl oder Kohle, aber auch mit regenerativen Energieträgern wie Biomasse oder Müll1. Bild 1 zeigt die Black-Box-Darstellung eines mit Biomasse betriebenen BHKW. Diese Art der Nutzung von elektrischer Energie und Wärme nennt man Kraft-Wärme-Kopplung. Auch in Biogas- und Geothermie-Anlagen wird meist, wie in BHKW, sowohl elektrische Energie als auch Wärme genutzt, d. h. sie arbeiten ebenfalls nach dem Prinzip der Kraft-Wärme-Kopplung. 4 Elektrotechnik Der Mittellastbereich wird abgedeckt von Kraftwerken, die man innerhalb weniger Stunden hochfahren und wieder abschalten kann. Dies sind: ▪▪ Steinkohlekraftwerke ▪▪ Erdgas- und (seltener) Mineralölkraftwerke Im Spitzenlastbereich setzt man Kraftwerke ein, die innerhalb von wenigen Minuten oder gar Sekunden einsatzbereit sind und auch ebenso schnell wieder abgeschaltet werden können. Dazu sind in der Lage: ▪▪ Speicherkraftwerke ▪▪ Pumpspeicherkraftwerke ▪▪ Gasturbinenkraftwerke 1 Müll wird in den Energiestatistiken unter den regenerativen Energieträgern geführt. Alles verstanden? 1. B egründen Sie, warum der Begriff „Erzeugung elektrischer Energie“ genau genommen falsch ist! Chemische Energie Ech Technisches System Blockheizkraftwerk 2. E rläutern Sie, welche Energiewandlung in einem Kernkraftwerk abläuft! 3. S tellen Sie das technische System Laufwasserkraftwerk als Black-Box dar! 4. B eschreiben anhand einer Biogasanlage, was man unter dem Prinzip der Kraft-Wärme-Kopplung versteht und stellen Sie das System als Black-Box dar! Grundlastkraftwerke laufen deshalb, bis auf Wartungs- und Revisionszeiten, im Prinzip während des ganzen Jahres durch. Grundlastkraftwerke sind: ▪▪ Kernkraftwerke ▪▪ Braunkohlekraftwerke ▪▪ Laufwasserkraftwerke Wärme Etherm oder Q Bild 1:BHKW mit Biomasse (z. B. Holzabfälle, Hackschnitzel, …) betrieben 2400 MW Das Kraftwerksmanagement 100 Spitzenlast 2100 elektrische Leistung P Die Schwierigkeit bei der Erzeugung und Verteilung elektrischer Energie liegt in der Tatsache begründet, dass man die elektrische Energie im gleichen Augenblick erzeugen muss, in dem sie vom Verbraucher benötigt wird. Die Netzbetreiber, das sind in der Regel die großen Energieversorgungsunternehmen (EVU), schätzen täglich den Bedarf des nächsten Tages ab, um den Einsatz von Kraftwerken zu planen. Bild 2 zeigt ein typisches Tagesbelastungsdiagramm eines Netzbetreibers. Daraus ist erkennbar, dass im Laufe von 24 Stunden der Bedarf an elektrischer Energie sehr stark schwankt. Eine bestimmte Grundlast wird jedoch immer benötigt. Elektrische Energie Eel % Grundlast 1800 Spitzenlast 1500 Mittellast 1200 Mittellast 80 60 Pumpspeicherung 40 900 Grundlast 600 20 300 0 0 2 4 6 0 8 10 12 14 16 18 20 Uhr 24 Uhrzeit an einem Sommertag an einem Wintertag Bild 2:Tagesbelastungsdiagramm eines elektrischen Versorgungsnetzes 4.4 Die Vielfalt der Elektrotechnik Alles verstanden? 315 kleineren Bundesautobahnen, wie A70, A93 oder A96. 1. Begründen Sie, warum … a)der Bedarf an elektrischer Energie im Tagesverlauf so sehr schwankt! b)der Bedarf an elektrischer Energie im Winter viel höher ist, als im Sommer! 2. E rläutern Sie, was man unter der Grundlast versteht und welche Kraftwerkstypen diesen Bereich abdecken! 3. B eschreiben Sie, welche Eigenschaften Kraftwerke haben müssen, die den Spitzenlastbereich abdecken sollen! Mittelspannungsnetz: Diese Netzebene dient zur Versorgung von Ortsnetzen, Krankenhäusern und kleineren Industriebetrieben. In diese Spannungsebene, die von 10 kV bis 30 kV reicht, speisen Windenergieanlagen, große Photovoltaikanlagen und städtische Kraftwerke ein. Verglichen mit dem Straßennetz entsprechen sie den Bundesstraßen, die von den Autobahnausfahrten in die Städte und Gemeinden führen. Spannungsebenen und Stromnetze Über die Stromnetze müssen von den Kraftwerken zu den verschiedenen Verbrauchern riesige elektrische Leistungen im Bereich von Megawatt (MW) oder gar Gigawatt (GW) über große Entfernungen transportiert werden. Dies verursacht jedoch Leitungsverluste, da die Leitungen durch hohe Stromstärken erwärmt werden und diese Wärme an die Umgebung abgestrahlt wird. Die Leitungsverluste können also bei einer bestimmten Übertragungsleistung nur klein gehalten werden, wenn die Spannung möglichst hoch ist und dadurch der Strom klein bleibt. Damit man die erforderlichen elektrischen Leistungen wirtschaftlich übertragen kann, hat man in der Stromversorgung mehrere Spannungsebenen eingeführt (Bild 1). Die Generatoren in den Kraftwerken erzeugen je nach Bauart und nach Kraftwerkstyp Spannungen zwischen 6,0 kV und 30 kV. Am Ausgang des Kraftwerks wird durch einen Transformator die Spannung auf die gewünschte Spannungsebene transformiert. Die Netzstruktur ist durchaus vergleichbar mit dem Straßennetz in Deutschland. Höchstspannungsnetze: Diese Spannungsebenen von 220 kV und 380 kV dienen zur Übertragung elektrischer Energie über große Entfernungen. Auf dieser Spannungsebene speisen die großen Braunkohle- und Kernkraftwerke ein. Verglichen mit dem Straßennetz entsprechen sie den großen Bundesautobahnen, wie A3, A7 oder A8. Höchstspannung 380 kV Braunkohle- und Kernkraftwerke Transformator Höchstspannung 220 kV Steinkohle- und Wasserkraftwerke Industriekraftwerke Hochspannung 110 kV Großindustrie Mittelspannung Niederspannung 10 kV bis 30 kV 0,4 kV Hochspannungsnetz: Auf dieser Netzebene mit einer Spannung von 110 kV werden mittlere Entfernungen überbrückt und die Großindustrie versorgt. Kleinere Kraftwerke speisen ihre Energie in dieses Netz ein. Verglichen mit dem Straßennetz entsprechen sie den Ortsnetz Kleinindustrie, Gewerbe Verwaltung, Schulen, Krankenhäuser... Bild 1: Spannungsebenen der Stromversorgung