und Spindynamik des zweidimensionalen Elektronengases mit Spin
Werbung

Masterarbeit im Studienfach Master Physik
Ladungs- und Spindynamik
des zweidimensionalen Elektronengases
mit Spin-Bahn-Kopplung
vorgelegt am
Lehrstuhl für Theoretische Physik II
an der
Universität Augsburg
Von:
Matrikelnummer:
Am:
Erstgutachter:
Zweitgutachter:
Michael Gromer
1176716
29. Dezember 2016
Dr. Michael Dzierzawa
Prof. Dr. Thilo Kopp
Inhaltsverzeichnis
1
Einleitung
2
Modell und Methoden
2.1
2.2
2.3
2.4
3
3.2
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Dichteverteilung . . . . . . . . . . . . . . .
3.1.1 Zeitabhängige Dichteverteilung . .
3.1.2 Eindimensionale Dichteverteilung .
3.1.3 Zweidimensionale Dichteverteilung
Elektrisches Feld . . . . . . . . . . . . . .
3.2.1 Homogene Koordinaten . . . . . .
3.2.2 Anisotrope Streuung . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
33
33
33
34
38
42
43
45
Quasiklassische Spinrelaxation . . . . . . . . . . .
4.1.1 Zeitaufgelöste Betrachtung . . . . . . . . .
4.1.2 Eindimensionales System . . . . . . . . .
4.1.3 Zweidimensionales System . . . . . . . . .
Inhomogene initiale Spinpolarisierung . . . . . . .
Dresselhaus Spin-Bahn-Kopplung . . . . . . . . .
4.3.1 Persistent Spin Helix . . . . . . . . . . . .
4.3.2 Spinrelaxationszeit mit Dresselhaus-Effekt
Anisotrope Streuung . . . . . . . . . . . . . . . .
Magnetisches Feld . . . . . . . . . . . . . . . . .
Einfluss verschiedener Wände . . . . . . . . . . .
4.6.1 Reflektierende Wände . . . . . . . . . . .
4.6.2 Adiabatische Wände . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
53
53
53
62
66
72
75
76
78
84
89
93
94
96
Physikalische Grundlagen . . . . . . . .
2.1.1 Rashba-Effekt . . . . . . . . . .
2.1.2 Dresselhaus-Effekt . . . . . . .
Bewegungsgleichungen . . . . . . . . .
Analytische Formulierung . . . . . . .
2.3.1 System ohne Störstellenstreuung
2.3.2 Zeitabhängige Spinpolarisierung
2.3.3 Ortsabhängige Spinpolarisierung
Numerische Simulation . . . . . . . . .
.
.
.
.
.
.
.
.
.
Spindynamik
4.1
4.2
4.3
4.4
4.5
4.6
5
.
.
.
.
.
.
.
.
.
11
12
13
14
15
18
19
20
22
24
Ladungsdynamik
3.1
4
7
Zusammenfassung und Ausblick
105
111
A.1 Herleitung der Bewegungsgleichungen . . . . . . . . . . . . . . . . . . . . . . 111
A.2 Faktor τp im Zeitentwicklungsoperator . . . . . . . . . . . . . . . . . . . . . . 113
A Anhang
Literatur
115
Kapitel 1:
Einleitung
KAPITEL 1. EINLEITUNG
1. Einleitung
Seit über 90 Jahren ist der Menschheit die intrinsische Eigenschaft „Spin“ von Elementarteilchen bekannt. Spätestens 1922 wurde sie erstmals indirekt beobachtet, als Otto Stern und Walther Gerlach in dem nach ihnen benannten Stern-Gerlach-Versuch die Aufspaltung eines Strahls
aus Silberatomen in einem inhomogenen Magnetfeld feststellten und in [GS22] beschrieben.
Drei Jahre später schlug Wolfgang Pauli in [Pau25] erstmals das Prinzip des Spins vor. Seitdem
beschäftigten sich viele Physiker in zahllosen Arbeiten und Publikationen mit den Eigenschaften
des Spins. Trotz der unzähligen Arbeitsstunden, die seit der Entdeckung des Spins auf dessen
Untersuchung verwendet wurden, kann keineswegs behauptet werden, dass alle mit dem Spin
zusammenhängenden Phänomene heute zur Gänze verstanden wären. Obwohl der einfachste
Fall eines einzelnen, freien Teilchens mit Spin sehr gut beschrieben werden kann, ergeben sich
weitere interessante Phänomene, sobald zum Beispiel mehrere Teilchen oder Teilchen in einem
Material oder einem äußeren Feld betrachtet werden. Auch heute beschäftigen sich deshalb noch
etliche Arbeiten direkt oder indirekt mit den Eigenschaften spinbehafteter Teilchen und Materialien. Eine Suche nach „Spin“ im „Web of Science“1 liefert allein für den Zeitraum der letzten
fünf Jahre zum Zeitpunkt der Anfertigung dieser Arbeit über 132.000 Treffer. Es handelt sich
also durchaus um ein sehr aktives Gebiet der aktuellen Forschung.
Dass sich die aktuelle Forschung immer noch mit dem Spin beschäftigt, liegt nicht zuletzt
an den vielfältigen Anwendungsmöglichkeiten. Bereits heute ist das Verständnis spinbehafteter
Teilchen für viele technische Bereiche von größter Bedeutung. So wird beispielsweise in Computerfestplatten der Riesenmagnetowiderstand zur Informationsspeicherung verwendet. Dieser
Effekt ist nur erklärbar, wenn man den Spin in die Überlegungen miteinbezieht. Ein weiteres Gebiet, in dem sich die Technik von der sogenannten Spintronik immense Fortschritte verspricht,
sind Quantencomputer. Bisher konnten Quantencomputer nur mit sehr wenigen Qubits mittels
Ionenfallen hergestellt werden. Man hofft, indem man Qubits im Spin von Elementarteilchen
kodiert, Quantencomputer herzustellen, die auch auf mehrere Tausend Qubits skaliert werden
können. Dies wurde zum Beispiel 1998 von Bruce Kane in [Kan98] vorgeschlagen. Ein Ziel der
Forschung ist es also Qubits - und damit Information - durch die Quantenzustände des Spins darzustellen. Es ergeben sich nun jedoch einige Probleme bei der praktischen Realisierung. In dieser
Arbeit werden wir unter anderem auf das Problem der Spinrelaxation eingehen: realisiert man
ein Qubit über eine Spinpolarisierung, dann ist die gespeicherte Information verloren, sobald die
Polarisierung relaxiert. Da der Spin keine Erhaltungsgröße darstellt - nur der Betrag ist erhalten
- relaxiert ein System aus mehreren Teilchen zwangsweise in endlicher Zeit. Dieses Problem tritt
bei klassischen Bits, die üblicherweise durch elektrische Ladung dargestellt werden, nicht auf.
Das liegt daran, dass die elektrische Ladung im Gegensatz zum Spin eine Erhaltungsgröße ist.
1
https://www.webofknowledge.com
7
KAPITEL 1. EINLEITUNG
Die Spinrelaxation stellt eine der größten Hürden beim Fortschritt von klassischen Computern
zu Quantencomputern mit über Spin realisierten Qubits dar.
Wir werden uns in dieser Arbeit mit dem zweidimensionalen Elektronengas beschäftigen.
Dieses lässt sich experimentell durch Heterostrukturen von Halbleitern mit unterschiedlicher
Bandlücke realisieren, zum Beispiel GaAs- oder GaAlAs-Schichten. Eine Vielzahl von Effekten aufgrund der Spin-Bahn-Wechselwirkung wurden für solche Systeme theoretisch vorhergesagt und auch experimentell bestätigt (siehe [Sin+15]). Theoretische Zugänge reichen von
einer vollständig quantenmechanischen Beschreibung über den quasiklassischen Formalismus
der Greenschen Funktionen, der in etwa einer Boltzmann-Gleichung entspricht und den daraus
abgeleiteten Diffusionsgleichungen für Spin und Ladung, bis hin zu einer Beschreibung durch
quasiklassische Bewegungsgleichungen. Wir werden uns ausführlich mit letzterem Zugang beschäftigen.
Die vorliegende Arbeit ist wie folgt aufgebaut: in Kapitel 2 wird basierend auf Kiselev und
Kims „Progressive suppression of spin relaxation in two-dimensional channels of finite width“
[KK00] und aufbauend auf meinem Fachpraktikum und meiner Projektarbeit zum gleichen Thema, das Modell eines quasiklassischen, zweidimensionalen Elektronengases mit Spin-BahnWechselwirkung entwickelt. Dabei dient die Schrödingergleichung mit Rashba- und DresselhausHamiltonoperator als Ausgangspunkt, um die Bewegungsgleichungen des verwendeten Modells
herzuleiten. Das erhaltene Modell wird mittels analytischer Betrachtungen analysiert. Zum Vergleich und zur Analyse an Stellen, an denen die analytische Betrachtung versagt, wird eine
Monte-Carlo-Simulation des selben Modells entwickelt.
Im dritten Kapitel werden wir feststellen, dass das verwendete Modell mit einer simplen Änderung auch Aussagen zur Ladungsdynamik und damit auch zur Teilchendichte treffen kann.
Da die Teilchendichte bei den Betrachtungen der Spindynamik benötigt wird, werden wir zuerst
auf die Ladungsdynamik eingehen. Diese wird dann auch für den Fall eines äußeren elektrischen
Feldes untersucht. Dabei wird zunächst eine isotrope Störstellenstreuung angenommen und dann
auch eine anisotrope Verteilung zugelassen.
In Kapitel 4 werden wir dann die Aussagen des Modells bezüglich der Spindynamik analysieren. Dabei werden wir nacheinander verschiedene Aspekte des Modells abändern und jeweils die
Auswirkungen auf die Aussagen, die das Modell zur Spindynamik liefert, untersuchen. In vielen Fällen wird es möglich sein, durch geschicktes Rechnen analytische Resultate zu erhalten.
Mit „Wolfram Mathematica“ wird dabei, wenn nötig, ein Computeralgebrasystem herangezogen, um die analytischen Berechnungen zu vereinfachen. Unter bestimmten Umständen wird es
aber auch so nicht möglich sein, exakte Resultate zu erhalten. Zusätzlich werden in jedem Fall
numerische Simulationen durchgeführt um Aussagen über das Modell zu treffen. Im Einzelnen
werden folgende Aspekte des Modells untersucht: zunächst werden wir die Relaxation eines in
das Elektronengas injizierten Spins im räumlichen Mittel betrachten, um im nächsten Schritt
inhomogene Verteilungen der Spinpolarisierung unter die Lupe zu nehmen und anschließend,
zusätzlich zum Rashba-Effekt, auch den Dresselhaus-Effekt zu berücksichtigt. Danach werden
die Streuzentren derart geändert, dass sich anisotrope Streuungen ergeben. Weiterhin wird betrachtet, wie ein äußeres magnetisches Feld auf das System wirkt und zuletzt wird untersucht,
welchen Einfluss Wände mit unterschiedlichen Randbedingungen auf die Spinrelaxation haben.
Im letzten Kapitel werden wir eine kurze Zusammenfassung der erarbeiteten Ergebnisse liefern und uns überlegen, an welchen Stellen weitere Forschungen ansetzen könnten.
8
Kapitel 2:
Modell und Methoden
KAPITEL 2. MODELL UND METHODEN
2. Modell und Methoden
In diesem Kapitel wird zuerst das verwendete Modell des zweidimensionalen Elektronengases
definiert. Dieses Modell dient als Ausgangsposition für alle weiteren Überlegungen. Später werden wir selektiv bestimmte Aspekte des Modells abändern. Als Orientierung dient die Arbeit
von Kiselev und Kim [KK00]. Im Gegensatz zu Kiselev und Kim werden wir aber nicht nur den
Rashba-Effekt, sondern auch den Dresselhaus-Effekt und äußere elektrische und magnetische
Felder miteinbeziehen. Für die weiteren Berechnungen ist es dann nötig, die Bewegungsgleichungen der Freiheitsgrade der Elektronen für das beschriebene Modell herzuleiten. Sobald die
Bewegungsgleichungen bekannt sind, wird es uns möglich sein, das Modell analytisch zu betrachten und Aussagen über das Verhalten des im Modell beschriebenen Systems zu treffen. Da
an bestimmten Stellen die analytischen Rechnungen an ihre Grenzen stoßen und zur Überprüfung der restlichen analytischen Ergebnisse, wurde eine Monte-Carlo-Simulation entwickelt, die
das zweidimensionale Elektronengas ebenfalls beschreibt.
Der Begriff des „zweidimensionales Elektronengas“ bedeutet, dass die Elektronen in einer
Richtung, hier der z-Richtung, unbeweglich sind und sich nur in den verbleibenden zwei Raumdimensionen bewegen können. Dies lässt sich experimentell durch die Bewegung auf der Grenzfläche verschiedenartiger Materialien realisieren. Ein Beispiel hierfür sind GaAs/GaAlAs Heteroübergänge. Weiter wird angenommen, dass alle Elektronen betragsmäßig die gleiche Geschwindigkeit |~v|, nämlich die Fermigeschwindigkeit vF , besitzen. Es werden also nur Elektronen
an der Oberfläche der Fermikugel (bzw. des Fermikreises) simuliert und es wird angenommen,
dass alle anderen Elektronen „eingefroren“ sind und nicht zum Verhalten des Systems beitragen.
Außerdem werden jegliche Wechselwirkungen der Elektronen untereinander vernachlässigt.
Während der Bewegung auf dieser Grenzfläche werden die Elektronen gelegentlich an Störstellen gestreut. Die Wahrscheinlichkeit einer Streuung ist pro Zeiteinheit gleichverteilt, d.h. die
Zeit und die zurückgelegte Weglänge zwischen zwei Streuungen eines Elektrons ist exponentialverteilt. Die mittlere Zeit zwischen zwei Stößen wird mit τp und die mittlere zurückgelegte
Weglänge mit Lp bezeichnet. Es gilt:
Lp = |~v|τp
(2.1)
Die Streuungen selbst sind instantan, elastisch und isotrop. Diese drei Eigenschaften resultieren aus sehr kleinen (genauer: deltaförmigen) Streuzentren. Es wird also angenommen, dass
die Coulombwechselwirkungen der Elektronen mit Störstellen, abgesehen von einem kleinen
Raumvolumen um die Atomrümpfe, abgeschirmt ist. Weiter wird angenommen, dass sich der
Spin eines Teilchens bei einer Streuung nicht ändert. Somit kann der Streuvorgang relativ einfach durch die zufällige Neuausrichtung des Geschwindigkeitsvektors beschrieben werden. Die
Isotropie der Streuvorgänge stellt einen Aspekt dar, den wir später aufgeben werden: wir werden
verschiedene anisotrope Streuungen betrachten, d.h., dass zum Beispiel Vorwärtsstreuung oder
Rückwärtsstreuung bevorzugt wird.
11
2.1. PHYSIKALISCHE GRUNDLAGEN
KAPITEL 2. MODELL UND METHODEN
Kiselev und Kim schränken dann das Elektronengas auch in y-Richtung durch das Hinzufügen
von zwei Wänden in einem bestimmten Abstand L ein. Daraus resultiert ein zweidimensionaler Streifen unendlicher Länge, dessen Breite genau L entspricht. Trifft ein Elektron auf eine
dieser Wände, so wird es daran instantan und elastisch reflektiert - die zur Wand senkrechte
Komponente des Geschwindigkeitsvektors ändert also ihr Vorzeichen. Systeme dieser Art wurden bereits im Fachpraktikum ausgiebig analysiert. In dieser Arbeit werden wir einerseits auch
eindimensionale Systeme betrachten, vereinfacht gesagt also das System durch zwei unendlich
nahe Wände einschränken und andererseits die Annahme instantaner Reflektion aufgeben und
adiabatische Wände untersuchen.
2.1. Physikalische Grundlagen
Auch die Untersuchung sogenannter Toy-Modelle (Spielzeugmodelle) kann in manchen Fällen
durchaus Sinn machen. Obwohl es nicht der Anspruch dieser Arbeit sein soll, physikalische Vorgänge zum Beispiel in Festkörpern exakt zu beschreiben, ist es doch von Vorteil, unser Modell
auf einer soliden Grundlage aufzubauen. Die quantenmechanische Grundlage für die gesamte
Arbeit bildet der Hamiltonoperator in Verbindung mit der Schrödingergleichung:
i~
∂
Ψ(t) = ĤΨ(t)
∂t
(2.2)
Dabei werden alle betrachteten physikalischen Effekte schon im Hamiltonoperator zu finden
sein, d.h. Rashba-Effekt, Dresselhaus-Effekt, elektrisches und magnetisches Feld. Genau genommen beinhaltet der verwendete Hamiltonoperator auch das Potential der Störstellen und Wände.
Im folgenden werden wir diese beiden Effekte jedoch losgelöst von den restlichen Vorgängen
betrachten. Der Hamiltonoperator nimmt folgende Form an:
Ĥ =
p̂2
~ · ~sˆ + Vimp ~rˆ + Vwall ~rˆ
+ ĤR + ĤD − qE~ · ~rˆ − γs B
2m
(2.3)
Dabei beschreibt der Term p̂2 /2m wie üblich die kinetische Energie des Elektrons. ĤR ist der
Rashba- und ĤD der Dresselhaus-Hamiltonoperator. Diese beiden werden in den nächsten Abschnitten genauer beschrieben. Der vierte Term −qE~ · ~rˆ beschreibt ein von außen angelegtes
~ · ~sˆ analog ein von außen angelegtes magnetisches
elektrisches Feld und der fünfte Term −γs B
Feld. Der Vollständigkeit halber sind mit Vimp und Vwall auch die Störstellen- und Wandpotentiale im Hamiltonoperator angedeutet. Da wir, wie am Anfang des Kapitels beschrieben, davon
ausgehen, dass die Elektronen sich bis zu einer Streuung oder Reflektion an den Wänden frei
bewegen, spielen diese Potentiale zumindest in einer quasiklassischen Betrachtungsweise keine
Rolle.
Genau genommen fehlt im Hamiltonoperator (2.3) noch ein Term: ein magnetisches Feld
müsste auch im kinetischen Term berücksichtigt werden, indem p̂ durch
~ ~rˆ
p̂ → ~pˆ − qA
(2.4)
~ das Vektorpotential des Magnetfeldes und ist vom Ort abersetzt wird. Dabei bezeichnet A
hängig. Diese Ersetzung bewirkt in den Bewegungsgleichungen die Lorentzkraft. Wir werden
12
2.1. PHYSIKALISCHE GRUNDLAGEN
KAPITEL 2. MODELL UND METHODEN
jedoch in dieser Arbeit die Lorentzkraft vernachlässigen und zeigen nur die Auswirkung eines magnetischen Feldes auf die Spindynamik (vierter Term im Hamiltonoperator). Außerdem
spielt die Lorentzkraft für das hier beschriebene Modell für moderat starke Magnetfelder nur
eine vernachlässigbare Rolle: die durch die Lorentzkraft bewirkte Krümmung der Teilchenbahn
zwischen zwei Störstellen ist sehr gering, wenn das Magnetfeld nicht extrem stark und die mittlere freie Weglänge Lp nicht unrealistisch lang ist. Das bedeutet, dass der Larmor-Radius rg ,
also der Radius der Kreisbahn auf die ein Elektron durch die Lorentzkraft gezwungen wird,
groß gegenüber der mittleren freien Weglänge Lp sein muss:
rg =
mvF
Lp
~
|q| · | B|
(2.5)
Dies liefert eine Bedingung für das Magnetfeld:
~ | B|
m
|q|τp
(2.6)
Nur wenn diese Bedingung erfüllt ist, ist die Vernachlässigung der Lorentzkraft vertretbar.
Möchte man stärkere Magnetfelder analysieren, so muss auf ein Modell mit Lorentzkraft zurückgegriffen werden.
2.1.1. Rashba-Effekt
Der Rashba-Effekt ist nach Emmanuil Iossifowitsch Rashba benannt, der ihn 1959 in [RS59]
erstmals beschrieb. Es existiert außerdem eine sehr vereinfachte Herleitung, die es erlaubt, den
Rashba-Hamiltonoperator bis auf einen Vorfaktor zu bestimmen. Dabei betrachtet man Elektronen in einem zweidimensionalen System. In der dritten Dimension, hier der z-Richtung, sind die
Elektronen also in ihrer Bewegung stark eingeschränkt. Dies drückt sich in einem Kastenpotential in dieser Richtung aus. Für den Rashba-Effekt ist nun eine Symmetriebrechung in z-Richtung
nötig. Dies wird üblicherweise structure inversion asymmetry genannt. Die Symmetriebrechung
im Inneren des Kastens kann zum Beispiel durch ein elektrisches Feld in z-Richtung hervorgerufen werden:
V(z) = −eEz
(2.7)
Relativistische Korrekturen bewirken, dass ein Elektron, das sich in diesem elektrischen Feld
bewegt, ein magnetisches Feld senkrecht zu seiner Bewegungsrichtung und zum elektrischen
Feld spürt [Fit06]:
~ = − E ~v × ~ez
B
c2
(2.8)
Dabei bezeichnet c die Lichtgeschwindigkeit. Dieses Magnetfeld gibt einen Beitrag zum Hamiltonoperator für das Elektron. Mit dem magnetischen Moment des Elektrons
~µs = γs ~s =
13
γs ~
~
σ
2
(2.9)
2.1. PHYSIKALISCHE GRUNDLAGEN
KAPITEL 2. MODELL UND METHODEN
~ der Vektor der Paulimatrizen ist,
wobei γs das gyromagnetische Verhältnis des Elektrons und σ
ergibt sich der sogenannte Rashba-Hamiltonoperator:
ˆ · ~ez
~ = γs ~E ~pˆ × ~ez · σ
~
~
~
σ
×
p
(2.10)
=
α
ĤR = −~µs · B
2mc2
|{z}
=:α
Obwohl dieses einfache Modell die korrekte Form des Rashba-Hamiltonoperators liefert, steht
man hier vor einem Problem: um die Elektronen als ein zweidimensionales System aufzufassen, nimmt man das oben erwähnte Kastenpotential an. Damit das Elektron im Inneren des
Kastenpotentials verbleibt, darf es im Mittel keine Kraft in z-Richtung spüren, d.h. das Kastenpotential muss die Symmetriebrechung ausgleichen. Dies würde auch den Rashba-Effekt wieder
aufheben. Wenn man jedoch realistischere Modelle wie zum Beispiel in [PZ99] verwendet, zeigt
sich, dass der Rashba-Effekt wieder auftritt. Die Spin-Aufspaltungskonstante α (englisch: spin
splitting constant) kann dabei jedoch einen anderen Wert als den aus Gleichung (2.10) annehmen. Mittlerweile konnte der Rashba-Effekt auch experimentell bestätigt werden, zum Beispiel
in [Wil+02].
2.1.2. Dresselhaus-Effekt
Der zweite Effekt der Spin-Bahn-Wechselwirkung, den wir in dieser Arbeit berücksichtigen
werden, wird Dresselhaus-Effekt genannt und ist nach Gene Dresselhaus benannt, der ihn 1955
in [Dre55] beschrieb. Er tritt in Materialien auf, die kein Inversionszentrum besitzen. Dies wird
als bulk inversion asymmetry bezeichnet. Ein prominentes Beispiel für ein solches Material, dass
in Zinkblende-Struktur kristallisiert, ist Galliumarsenid. In derartigen Materialien ergibt sich ein
Beitrag zum Hamiltonoperator der Form:
ĤBIA = γ σx p̂x p̂2y − p̂2z + σy p̂y p̂2z − p̂2x + σz p̂z p̂2x − p̂2y
(2.11)
wobei γ eine Materialkonstante darstellt. Wird nun aus derartigen Materialien eine Grenzschicht
hergestellt, auf die die Bewegung der Elektronen eingeschränkt ist, lässt sich der Beitrag des
Dresselhaus-Effektes zum Hamiltonoperator erklären. Durch die Einschränkung der Bewegung
auf diese Grenzschicht verschwindet der Erwartungswert des Impulses in z-Richtung und der
Erwartungswert des Impulsquadrates in dieser Richtung kann, wie z.B. in [Lec12, S. 14] beschrieben, genähert werden:
h p̂z i = 0
D E
π2
p̂2z ≈ 2
LQW
(2.12)
(2.13)
Dabei bezeichnet LQW die Dicke der Grenzschicht. Der genaue Wert von h p̂2z i ist für die weiteren
Betrachtungen irrelevant, da wir ihn durch β parametrisieren. Man erhält durch Einsetzen in
Gleichung (2.11) den Dresselhaus-Hamiltonoperator:
ĤD = β σx p̂x − σy p̂y + γ −σx p̂x p̂2y + σy p̂y p̂2x
(2.14)
D E
Hier und im Folgenden wird β = γ p̂2z als Parameter des linearen Dresselhaus-Effektes verwendet.
14
2.2. BEWEGUNGSGLEICHUNGEN
KAPITEL 2. MODELL UND METHODEN
2.2. Bewegungsgleichungen
Im letzten Abschnitt haben wir mit den Gleichungen (2.3), (2.10) und (2.14) den Hamiltonoperator des betrachteten Systems vollständig definiert. Als nächstes stellt sich die Aufgabe, die
Bewegungsgleichungen des Systems herzuleiten. Diese sind durch die zeitlichen Änderungen,
also die Zeitableitungen, der Erwartungswerte der Freiheitsgrade des Elektrons gegeben. Die
Freiheitsgrade sind Ort, Impuls und Spin.
Das Ehrenfest-Theorem liefert einen Ausdruck für genau die gesuchten Ableitungen und soll
daher im Folgenden kurz hergeleitet werden. Dazu wird die zeitliche Änderung eines Erwartungswertes betrachtet:
Z
d D E d
Ψ∗ ÔΨdV =
Ô =
dt
dt
!
!
!#
Z "
∂Ψ∗
∂Ψ
∗ ∂Ô
∗
=
ÔΨ + Ψ
Ψ + Ψ Ô
dV =
(2.15)
∂t
∂t
∂t
!
!#
* +
Z "
∂Ψ∗
∂Ψ
∂Ô
∗
=
ÔΨ + Ψ Ô
dV +
∂t
∂t
∂t
Hier ist zu beachten, dass die Wellenfunktion eines Teilchens mit Spin durch einen Vektor beschrieben wird. Zusätzlich zur Integration über den Raum wir hier also auch über die Spinzustände summiert. Aus der Schrödingergleichung (2.2) folgt durch Umstellen und Konjugieren:
∂Ψ
i
= − ĤΨ
∂t
~
i
i
∂Ψ∗
= Ψ∗ Ĥ † = Ψ∗ Ĥ
∂t
~
~
Einsetzen in die rechte Seite der Gleichung (2.15) liefert das Ehrenfest-Theorem:
* +
i
d D E ih ∗
∂Ô
∗
=
Ô =
Ψ Ĥ ÔΨ − Ψ ÔĤΨ dV +
dt
~
∂t
iE * ∂Ô +
i Dh
=
Ĥ, Ô +
~
∂t
(2.16)
(2.17)
(2.18)
Um nun die gesuchten Bewegungsgleichungen zu erhalten, muss lediglich der Hamiltonoperator (2.3) in das Ehrenfest-Theorem (2.18) eingesetzt werden und für die entsprechenden Freiheitsgrade ausgerechnet werden. Die genauen Rechnungen sind im Anhang A.1 zu finden. Unter
Verwendung der Kommutatoren für die vorkommenden Operatoren erhält man die Bewegungsgleichungen:
D E
D
E
D E 2 β−γh p̂y i2 2γh p̂x ih p̂y i 0 ! D E
~pˆ
d ˆ
2a
~r =
~sˆ
− ~ez × ~sˆ −
(2.19)
−2γh p̂x ih p̂y i −β+γh p̂x i2 0
dt
m
~
~
0
0
0
d D ˆE
~p = qE~
dt
(2.20)
D E
d D ˆE ~s = ω
~R + ω
~D + ω
~ B × ~sˆ
dt
(2.21)
15
2.2. BEWEGUNGSGLEICHUNGEN
KAPITEL 2. MODELL UND METHODEN
~ R, ω
~ D und ω
~ B in der Bewegungsgleichung des Spins folgendermaßen
Wobei die Frequenzen ω
definiert sind:
2α D ˆ E
~R =
~p × ~ez
ω
(2.22)
~
!
0
0 D E
2 −β+γh p̂y i2
~D =
~pˆ
ω
(2.23)
0
β−γh p̂x i2 0
~
0
0
0
~
~ B = −γs B
ω
(2.24)
Man beachte, dass bei der Herleitung die Streuung an Störstellen bzw. die Reflektion an Wänden nicht mit einbezogen wurden. Da in all diesen Bewegungsgleichungen nur noch die Erwartungswerte der Freiheitsgrade vorkommen, vereinfachen wir die Schreibweise, indem wir die
Klammern der Dirac-Notation und das Zirkumflex über den Operatoren weglassen:
D E
~xˆ → ~x
(2.25)
Dies entspricht einem quasiklassischen Bild der Elektronen: sie besitzen einen exakten Ort ~r,
Impuls ~p und Spin ~s. Im Folgenden werden wir die einzelnen Bewegungsgleichungen nun genauer unter die Lupe nehmen.
Ort ~r:
~p 2a
d
2
~r = − ~ez × ~s −
dt
m
~
~
β−γpy 2 2γpx py 0
−2γpx py −β+γp2x 0
0
0
0
!
~s
(2.26)
Die Änderung des Ortes mit der Zeit setzt sich aus drei Beiträgen zusammen: der erste Term entspricht der klassischen Geschwindigkeit. Der zweite Term resultiert aus der Spin-Bahn-Kopplung
durch den Rashba-Hamiltonoperator und bewirkt, dass sich das Elektron nicht exakt in der
Richtung seines Impulses bewegt. Analoges gilt für den dritten Term, nur dass dieser aus dem
Dresselhaus-Effekt resultiert. Entscheidend sind hier aber die Größenordnungen der beiden Beiträge: die klassische Geschwindigkeit ~p/m bewegt sich im Bereich der Fermi-Geschwindigkeit
und damit bei ca. 106 m/s bis 108 m/s. Die Größenordnung für α~ ist in [Man+15, S. 3] mit
ca. 10−11 eVm bis 10−10 eVm angegeben. Dies ergibt für den zweiten Term eine Größenordnung
von ca. 104 m/s bis 105 m/s und somit eine bis vier Größenordnungen kleiner als die klassische
Geschwindigkeit. Damit kann die quantenmechanische Korrektur durch die Rashba-Spin-BahnKopplung im Folgenden vernachlässigt werden. Für die Größenordnung der Dresselhaus-SpinBahn-Kopplung liefern Experimente ähnliche Größenordnungen. Toloza Sandoval u. a. geben in
[San+12, S. 3] das Verhältnis α/β mit 0,5 bis 7,6 an. Damit hat der Dresselhaus-Effekt größenordnungsmäßig eine ähnliche Stärke wie der Rashba-Effekt und die Wirkung auf die Flugbahn
der Elektronen kann demnach ebenfalls vernachlässigt werden. Dies ist in Übereinstimmung
mit allen hier referenzierten Arbeiten (siehe zum Beispiel [OY07]). Die Elektronen bewegen
sich also gemäß der klassischen Mechanik und die Bewegungsgleichung vereinfacht sich zu:
~p
d
~r =
dt
m
16
(2.27)
2.2. BEWEGUNGSGLEICHUNGEN
KAPITEL 2. MODELL UND METHODEN
Impuls ~p:
d
~p = qE~
(2.28)
dt
Wie bereits in Abschnitt 2.1 auf Seite 12 erklärt, fehlt hier die Lorentzkraft. Die Änderung des
Impulses mit der Zeit entspricht, davon abgesehen, auch mit quantenmechanischem Rashba- und
Dresselhaus-Effekt dem klassischen Fall: eine Beschleunigung wird nur durch ein von außen
angelegtes elektrisches Feld hervorgerufen. Ist kein elektrisches Feld vorhanden, behalten die
Elektronen ihren Impuls zwischen den Streuungen bei und bewegen sich somit geradlinig.
Spin ~s:
d
~R + ω
~D + ω
~ B × ~s
~s = ω
dt
~R =
ω
2α
~p × ~ez
~
~D =
ω
2
~
−β+γpy 2
0 0
0
β−γp2x 0
0
0 0
(2.29)
(2.30)
!
~p
~
~ B = −γs B
ω
(2.31)
(2.32)
Der Spin ändert sich in einem infinitesimal kleinen Zeitabschnitt proportional zum Kreuzpro~ ges = ω
~R + ω
~B + ω
~ B und dem Spin ~s selbst. Dies beschreibt eine Drehung um die
dukt aus ω
~ ges und wird Spinpräzession genannt. Die Rotationsgeschwindigkeit entspricht genau
Achse ω
~ ges die vektorielle Winkelgeschwindigkeit der Spinpräzession.
dem Betrag |~
ωges |. Damit ist ω
Außerdem wird hier deutlich, wie die beiden quantenmechanischen Effekte auf den Spin wirken: nämlich als ein impulsabhängiges Magnetfeld. Das Magnetfeld, das vom Rashba-Effekt
ausgeht, ist senkrecht zu ~p und ~ez . Die Richtung des Magnetfeldes des Dresselhaus-Effektes ist
im allgemeinen Fall nicht so einfach zu beschreiben. Zumindest für den linearen Anteil lässt sich
aber eine Aussage treffen: hier ist das Magnetfeld proportional zum in x-Richtung gespiegelten
Impuls.
Um die verschiedenen Parameter besser unter einen Hut zu bringen, definiert man den dimensionslosen Rashba-Parameter a derart, dass er die Stärke der Rashba-Spin-Bahn-Wechselwirkung
mit der mittleren freien Flugzeit in Beziehung setzt:
2α|~p|τp
(2.33)
~
Eine Verwechslung mit der Größe α, die die Dimension einer Geschwindigkeit besitzt und ebenfalls als Rashba-Parameter bezeichnet wird, sollte ausgeschlossen sein. Die dimensionslosen
Parameter b1 und b3 beschreiben analog dazu die Stärke des linearen bzw. kubischen Teils der
Dresselhaus-Spin-Bahn-Wechselwirkung:
a := |~
ωR |τp =
2β|~p|τp
~
2γ|~p|τp
b3 := |~
ωD,cub. |τp =
~
b1 := |~
ωD,lin. |τp =
17
(2.34)
(2.35)
2.3. ANALYTISCHE FORMULIERUNG
KAPITEL 2. MODELL UND METHODEN
In Abwesenheit eines äußeren Magnetfeldes und wenn nur einer der linearen Terme der beiden
quantenmechanischen Effekte wirkt, lassen sich die Parameter a und b1 folgendermaßen interpretieren: wenn sich ein Elektron für die Zeit τp in eine Richtung bewegt, so dreht sich der Spin
genau um den Winkel a für den Rashba-Effekt bzw. b1 für den Dresselhaus-Effekt. Die Drehachse wird dabei weiterhin durch Gleichung (2.29) beschrieben. Man kann diese Parameter auch als
„Sauberkeit“ des Systems, bezogen auf die Spin-Dynamik interpretieren: ein kleiner Wert für a,
b1 oder b3 beschreibt ein System mit vielen Störstellen und damit einen kleinen Drehwinkel zwischen zwei Streuprozessen. Andererseits beschreiben große Werte für die Parameter ein System
mit wenig Störstellen, also einen großen Drehwinkel zwischen zwei Streuprozessen.
Zur weiteren Vereinfachung werden wir in den numerischen Simulationen die Massen m, den
Betrag des Impulses ~p und die Zeit zwischen zwei Streuungen τp auf 1 setzen. Damit sind der
Betrag der Geschwindigkeit |~v| und die mittlere freie Weglänge Lp ebenfalls 1. Die physikalischen Vorgänge lassen sich auch mit diesen Normierungen korrekt beschreiben. Die Verkleinerung des Parameterraumes erleichtert jedoch den Vergleich der Ergebnisse untereinander und
mit den Ergebnissen anderer Arbeiten.
2.3. Analytische Formulierung
Mit den Bewegungsgleichungen aus dem letzten Abschnitt wurde das noch fehlende Puzzlestück
des Modells definiert. Es sind nun alle Informationen bekannt, um die Bewegungsgleichungen
anzuwenden. Ziel dieses Abschnitts ist es, die orts- und zeitabhängige Spinpolarisierung ~s ~r, t
des Systems zu bestimmen. Die spitzen Klammern beschreiben von jetzt an den Mittelwert über
alle Elektronen des Systems und keinen quantenmechanischen Erwartungswert mehr. Wie wir
im letzten Kapitel bereits festgelegt hatten, beschäftigen wir uns hier mit einem quasiklassischen Modell, d.h. die Freiheitsgrade der Teilchen sind scharf definiert und unterliegen keiner
quantenmechanischen Unschärfe.
Zum Zeitpunkt t = 0 wird das System dabei folgendermaßen initialisiert: ein Elektron mit
Spin ~s(0) befindet sich am Ort ~r = 0. Die Geschwindigkeit des Elektrons ist in der xy-Ebene
gleichverteilt mit Betrag 1. Zu diesem Zeitpunkt herrscht also volle Spinpolarisierung. Im weiteren Verlauf des Systems bewegt sich das Elektron für eine zufällige, exponentialverteilte Zeit
lang gemäß der Bewegungsgleichungen (2.27) bis (2.29). D.h. das Elektron bewegt sich geradlinig - ein äußeres elektrisches Feld werden wir erst später berücksichtigen - und der Spin rotiert
~ ges . Die mittlere freie Flugzeit beträgt τp und man erhält für die Wahrscheinlichum die Achse ω
keitsverteilung der freien Flugzeit:
p(t) =
1 −t/τp
e
τp
(2.36)
Nach dieser Zeit streut das Elektron instantan, elastisch und isotrop an einer Störstelle. Diese
Streuung wird durch eine zufällige Neuausrichtung des Impuls-/Geschwindigkeitsvektors beschrieben. Der Spin eines Elektrons ändert sich bei einer Streuung nicht. Wände werden wir
ebenfalls erst später berücksichtigen, so dass Störstellenstreuung der einzige physikalische Effekt neben der Spin-Bahn-Wechselwirkung bleibt.
18
2.3. ANALYTISCHE FORMULIERUNG
KAPITEL 2. MODELL UND METHODEN
2.3.1. System ohne Störstellenstreuung
Um das beschriebene System analytisch zu untersuchen, gehen wir schrittweise vor. Die kleinste Einheit dieses Systems ist ein einzelnes Elektron, dass sich ohne jegliche Störungen frei bewegt. Bei der Analyse der Bewegungsgleichung des Spins (2.29) in Abschnitt 2.2 hatten wir
festgestellt, dass der Spin während der freien Bewegung eine Rotation um die vektorielle und
~ ges ~p vollführt. Bewegt sich ein Elektron vom Zeitimpulsabhängige Winkelgeschwindigkeit ω
~ ges ~p t durch
punkt 0 zum Zeitpunkt t, lässt sich die Drehung seines Spins um den Winkel ω
eine Matrixmultiplikation ausdrücken:
~ ges ~p t ~s(0)
~s(t) = R ω
(2.37)
Dabei ist der Zeitentwicklungsoperator R(~θ) eine Rotationsmatrix der Form
2
nx (1 − cos θ) + cos θ
nx ny (1 − cos θ) − nz sin θ nx nz (1 − cos θ) + ny sin θ
R ~θ = ny nx (1 − cos θ) + nz sin θ
ny nz (1 − cos θ) − nx sin θ
n2y (1 − cos θ) + cos θ
nz nx (1 − cos θ) − ny sin θ nz ny (1 − cos θ) + nx sin θ
n2z (1 − cos θ) + cos θ
(2.38)
.
wobei θ = |~θ| und ~n = ~θ |~θ| verwendet wurden. Für den einfachen Fall ausschließlicher RashbaSpin-Orbit-Wechselwirkung ergibt sich zum Beispiel:
!
at ~p × ~ez
~s(t) = R
~s(0)
(2.39)
τp |~p|
Da wir nun aber nicht an der Bewegung eines einzelnen Elektrons interessiert sind, sondern das
Verhalten eines Systems aus (unendlich) vielen dieser Elektronen analysieren wollen, beschreiben wir die Zeitentwicklung dieses Systems mit:
~s(t) = R(t) ~s(0)
(2.40)
In Gleichung (2.37) hatte R(~θ) die Zeitentwicklung eines einzelnen Elektrons, also für eine spezielle Trajektorie, die dieses Elektron nimmt, beschrieben. Hier bezeichnet R(t) entsprechend
die Zeitentwicklung gemittelt über alle möglichen Trajektorien. In einem System ohne Störstellenstreuung ist der einzige unbestimmte Parameter der Trajektorien die Richtung des Impulses.
Da wir uns zuvor auf in der xy-Ebene gleichverteilte Impulse festgelegt hatten, ergibt sich der
Mittelwert der Zeitentwicklung über alle Trajektorien durch ein einfaches Winkelmittel:
R(t) =
Z2π
dφ ~ ges ~p t
R ω
2π
mit ~p = pF
cos φ sin φ
0
(2.41)
0
Damit kann mit Gleichung (2.40) aus jeder initialen Spinpolarisierung ~s(0) die Spinpolarisie
rung ~s(t) zu einem beliebigen Zeitpunkt t berechnet werden.
Wir werden im Verlauf dieser Arbeit neben zweidimensionalen, auch eindimensionale Elektronengase untersuchen. Für eindimensionale System gelten die hier aufgeführten Überlegungen
19
2.3. ANALYTISCHE FORMULIERUNG
KAPITEL 2. MODELL UND METHODEN
gleichermaßen, wenn man berücksichtigt, dass die möglichen Trajektorien und damit die möglichen Richtungen von ~p nun nicht mehr gleichverteilt in der xy-Ebene sind, sondern nur noch
gleichverteilt auf der x-Achse. Das bedeutet, es sind genau zwei Flugrichtungen möglich: in positiver und in negativer x-Richtung. Damit wird das Integral in Gleichung (2.41) zu einer Summe
und man erhält:
px 1 X ~ ges ~p t
R ω
mit ~p = 0
R(t) =
(2.42)
0
2 p =±p
x
F
2.3.2. Zeitabhängige Spinpolarisierung
Wir haben im vorherigen Abschnitt ein System ohne Streuungen beschrieben. Dieses Bild ist
aber weder besonders interessant, noch ist es realistisch. Es diente der Hinführung auf ein System mit Streuungen, welches nun untersucht werden soll. Wir betrachten zuerst ein Elektron,
das genau einmal gestreut wird. Das Elektron bewegt sich also gemäß Gleichung (2.37) eine
gewisse Zeit t1 lang mit einem Impuls ~p1 , wird dann gestreut und bewegt sich nochmals eine
Zeit t2 lang mit eventuell anderem Impuls ~p2 . Dieser Vorgang drückt sich durch eine Hinter
~ ges ~p2 t2
~ ges ~p1 t1 und ω
einanderausführung zweier Rotationen um die vektoriellen Winkel ω
aus:
~s(t) = R ω
~ ges ~p2 t2 R ω
~ ges ~p1 t1 ~s(0)
(2.43)
Dabei muss t = t1 + t2 gelten. Da wir wie bereits in Gleichung (2.40) wieder an der Spinpolarisierung des gesamten Systems und nicht am Verhalten einzelner Elektronen interessiert sind,
müssen wir wieder über alle möglichen Trajektorien mitteln. Anders als bei einem System ohne
Streuungen sind nun aber die Orientierungen der Impulse nicht mehr die einzigen unbestimmten
Parameter der Trajektorien. Die Zeit t ist zwar vorgegeben, aus welchen Beträgen t1 und t2 diese
Zeit sich zusammensetzt, ist allerdings beliebig. Anschaulich beschrieben, ist es möglich, dass
die Streuung zu jedem Zeitpunkt im Intervall [0,t] stattfindet. Die Wahrscheinlichkeitsverteilung
hierfür ist bekannt. Sie entspricht genau der Wahrscheinlichkeitsverteilung der mittleren freien
Flugzeit (2.36) für t1 . Wir müssen also zusätzlich zu den Richtungen der beiden Impulse ~p1 und
~p2 auch über den Zeitpunkt der Streuung t1 integrieren. Damit ist mit t2 = t − t1 auch die Zeitspanne des zweiten „Streckenabschnitts“ bekannt. Da dieses vorgehen insbesondere für mehrere
Streuungen aber sehr kompliziert wird, behelfen wir uns, indem wir über beide Zeiten t1 und t2
integrieren und die Relation t = t1 + t2 über eine Deltafunktion sicherstellen. Wir erhalten:
~s(t) = U2 (t) ~s(0)
U2 (t) = τp
Z∞
dt2 p(t2 )
0
= τp
Z2π
dφ2 ~ ges ~p2 t2
R ω
2π
0
Z∞
Z2π
dt1 p(t1 )
0
Z∞
dt2 p(t2 ) R(t2 )
0
Z∞
20
dφ1 ~ ges ~p1 t1 δ t1 + t2 − t =
R ω
2π
0
dt1 p(t1 ) R(t1 ) δ t1 + t2 − t
0
(2.44)
mit ~pi = pF
cos φi sin φi
0
2.3. ANALYTISCHE FORMULIERUNG
KAPITEL 2. MODELL UND METHODEN
Die Herkunft des Faktors τp wird in Anhang A.2 erklärt. Es stellt sich als überaus vorteilhaft
heraus, die Deltafunktion über ihre Fouriertransformation darzustellen:
∞
Z dω
δ t1 + t2 − t =
eiω(t1 +t2 −t)
2π
(2.45)
−∞
Damit erhält man für die Zeitentwicklung eines Systems, dessen Elektronen alle genau einmal
gestreut werden:
U2 (t) = τp
Z∞
−∞
dω −iωt
e
2π
Z∞
Z∞
dt2 p(t2 ) eiωt2 R(t2 )
0
dt1 p(t1 ) eiωt1 R(t1 )
(2.46)
0
|
{z
=:F(ω)
}
~ ges , ω
~ R,
Die Integrationsvariable ω darf hier keinesfalls mit einer der Winkelgeschwindigkeiten ω
~ D oder ω
~ B verwechselt werden. Die Zeitentwicklung eines Systems, dessen Elektronen genau
ω
n − 1 mal gestreut werden, lässt sich mit der n-ten Potenz von F(ω) schreiben als:
Un (t) = τp
Z∞
dω −iωt n
e F (ω)
2π
(2.47)
−∞
Nun haben wir zu Beginn dieses Abschnitts angenommen, dass das Elektron auf seinem Weg
vom Zeitpunkt 0 bis t genau einmal gestreut wird. Diese Annahme ist aber nicht haltbar. Selbst
wenn man davon ausgeht, dass die Zeit t genau oder ungefähr der mittleren freien Flugzeit τp
entspricht, ist es aufgrund der Exponentialverteilung immer möglich, dass das Elektron selbst
in einer kleinen Zeitspanne sehr oft gestreut wird. Sehr viele Streuungen in sehr kurzer Zeit
sind genauso wie sehr wenige in sehr langen Zeitspannen zwar unwahrscheinlich, aber durchaus
möglich. Trifft man beispielsweise die Annahme, dass die Anzahl der Streuungen genau t/τp
entspricht, vernachlässigt man diese unwahrscheinlichen Fälle. Geht man gar davon aus, dass die
Zeiten der einzelnen Streckenabschnitte immer gleich τp sind, wie es manche wissenschaftliche
Arbeiten nichtsdestotrotz annehmen (siehe zum Beispiel [YOL10]), erhält man später signifikant
andere Ergebnisse. Wir gehen also davon aus, dass alle Anzahlen von Streuungen möglich sind,
und kommen dem nach, indem wir über alle möglichen Un (t) summieren:
~s(t) = U(t) ~s(0)
(2.48)
∞
∞
Z
Z
∞
∞
X
−1
dω −iωt X n
dω −iωt
U(t) = τp
Un (t) = τp
e
e F(ω) 1 − F(ω)
F (ω) = τp
2π
2π
n=1
n=1
−∞
−∞
| {z }
geometrische Reihe
Mit dieser Gleichung haben wir die zeitabhängige Spinpolarisierung eines zweidimensionalen
Elektronengases mit beliebiger, impulsabhängiger Spinpräzession vollständig analytisch gelöst.
~ ges ~p können nacheinander R(t), F(ω) und dann U(t) ausgerechnet und so das
Für spezielles ω
Verhalten des Systems vollständig beschrieben werden. Genau mit dieser Aufgabe werden wir
uns unter anderem in Abschnitt 4.1.1 ausführlich beschäftigen.
21
2.3. ANALYTISCHE FORMULIERUNG
KAPITEL 2. MODELL UND METHODEN
2.3.3. Ortsabhängige Spinpolarisierung
Im letzten Abschnitt haben wir die Zeitabhängigkeit der Spinpolarisierung analytisch beschrieben. Nun ist es aber durchaus möglich, und in den meisten Fällen auch Faktum, dass die Spinpolarisierung zu einer bestimmten Zeit räumlich nicht homogen ist. Man kann sich dies leicht
vorstellen, wenn man sich obiges Modell ansieht. Zum Zeitpunkt t = 0 befinden sich alle Elektronen am Ursprung des Koordinatensystems bei ~r = 0. Da sich die Elektronen mit endlicher
Geschwindigkeit vF bewegen, können sie in endlicher Zeit maximal einen bestimmten Raumbereich um den Ursprung erreichen. In Bereichen weiter vom Ursprung entfernt befinden sich
keine Elektronen. In diesen Bereichen ist somit die Spinpolarisierung nicht einmal definiert. Wie
bereits am Anfang des Abschnitts 2.3 angedeutet, werden wir nun die zeit- und ortsabhängige
Spinpolarisierung ~s ~r, t herleiten. Wir werden dabei auf den Überlegungen des vorherigen
Abschnitts aufbauen. In Gleichung (2.44) haben wir eine Deltafunktion eingeführt und die Relation t = t1 + t2 sicherzustellen. Wir können nun analog eine Deltafunktion verwenden, um
die einzelnen Geschwindigkeiten mit dem vorgegebenen Ort ~r zu verknüpfen. Die Vorstellung,
die uns zu Gleichung (2.44) geführt hat, war, dass sich die Elektronen eine Zeit t1 lang mit der
Geschwindigkeit ~v1 und dann eine Zeit t2 lang mit der Geschwindigkeit ~v2 bewegen. Mit diesen
Informationen kann man neben der Zeitentwicklung des Spins auch den Ort berechnen, an dem
sich die Elektronen nach der Bewegung befinden:
~r = ~r1 + ~r2 = ~v1 t1 + ~v2 t2 =
~p1
~p2
t1 + t2
m
m
(2.49)
Um eine ortsabhängige Spinpolarisierung zu beschreiben, fügen wir also Gleichung (2.44) eine
Deltafunktion hinzu, die obige Bedingung für ein vorgegebenes ~r sicherstellt. Auch hier stellt es
sich wieder als praktisch heraus, die Deltafunktion als Fouriertransformation darzustellen:
! Z∞ 2
~p1
~p2
d k i~k· ~pm1 t1 + ~pm2 t2 −~r
δ
t1 + t2 − ~r =
e
m
m
(2π)2
(2.50)
−∞
Hier bezeichnet ~k einen zweikomponentigen Vektor. Genau genommen wird im Exponenten
also das Skalarprodukt eines zwei- und eines dreikomponentigen Vektors gebildet. Da jedoch
die z-Komponente des Impulses immer Null ist, stellt das hier und im Folgenden kein Problem
dar. Man erhält für die ortsabhängige Zeitentwicklung eines Systems, dessen Elektronen genau
22
2.3. ANALYTISCHE FORMULIERUNG
KAPITEL 2. MODELL UND METHODEN
einmal gestreut werden:
Z∞
Z∞
Z2π
dφ2 dφ1 ~ ges ~p2 t2
~ ges ~p1 t1
dt1 p(t1 )
U2 ~r, t =τp dt2 p(t2 )
R ω
R ω
2π
2π
0
0
0
0
!
~p1
~p2
δ(t1 + t2 − t)δ
t1 + t2 − ~r =
m
m
cos φi Z∞
Z∞ 2
dω −iωt
d k −i~k·~r
sin φi
~
mit
p
=
p
i
F
=τp
e
e
0
2π
(2π)2
Z2π
−∞
Z∞
dt2 p(t2 ) e
0
−∞
Z2π
iωt2
dφ2 i t2~k·~p2 ~ ges ~p2 t2
em
R ω
2π
Z∞
Z2π
dt1 p(t1 ) e
0
0
iωt1
0
|
dφ1 i t1~k·~p1 ~ ges ~p1 t1
em
R ω
2π
{z }
=:F ~k,ω
(2.51)
Hier ist besonders zu beachten, dass die Winkelintegration nicht mehr separat über R(~θ) ausgeführt werden kann, um R(t) zu erhalten. Die Exponentialfunktion mit ~p1 bzw. ~p2 im Exponenten
muss nun beim Winkelmittel mit berücksichtigt werden, da mit φ1 bzw. φ2 über die Orientierung der Impulse integriert wird und die Exponentialfunktion somit von den φi abhängt. Weiter
sei angemerkt, dass F ~k, ω nun eine Funktion von zwei Variablen ist. Wie schon bei der rein
zeitaufgelösten Betrachtung bleibt noch die Summe über alle möglichen Streuanzahlen zu bilden. Man erhält:
~s ~r, t = U ~r, t ~s(0, 0)
Z∞ 2
Z∞
∞
X
−1
d k −i~k·~r ~ dω −iωt
~k, ω
F
k,
ω
U ~r, t = τp
Un ~r, t = τp
e
e
1
−
F
2π
(2π)2
n=1
(2.52)
−∞
−∞
Es wurde wie schon in Gleichung (2.48) die geometrische Reihe ausgenutzt. Damit ist die zeitund ortsabhängige Spinpolarisierung ebenfalls analytisch beschrieben. Auch wenn man eine
ähnliche Form wie für die nur zeitabhängige Spinpolarisierung erhält, treten hier einige Probleme auf. Zum einen handelt es sich bei der erhaltenen Lösung nicht um die Spinpolarisierung
im eigentlichen Sinn, sondern um die mit der Wahrscheinlichkeit, dass ein Elektron den Ort
~r erreicht, gewichtete Spinpolarisierung - also die Spindichte. Möchte man die Spinpolarisierung erhalten, muss man aus Ergebnis (2.52) die Dichteverteilung herausrechnen, indem man
durch diese teilt. Dieses Phänomen tritt bei der rein zeitabhängigen Spinpolarisierung nicht auf,
da ein Elektron immer, also mit Wahrscheinlichkeit 1, jeden Zeitpunkt t erreicht. Zum anderen
wird sich das Ausrechnen der vorkommenden Integrale als großes Problem herausstellen. Selbst
in den einfachsten Fällen wird es nicht möglich sein, exakte, geschlossene Lösungen zu erhalten. In den Abschnitten 4.1.2 und 4.1.3 werden wir uns eingehend mit der Lösung beschäftigen
und es wird auch deutlich werden, warum die zeit- und ortsabhängige Spinpolarisierung so viel
schwieriger zu berechnen ist als die rein zeitabhängige Spinpolarisierung.
23
2.4. NUMERISCHE SIMULATION
KAPITEL 2. MODELL UND METHODEN
2.4. Numerische Simulation
Im letzten Abschnitt haben wir das Modell eines quasiklassischen zweidimensionalen Elektronengases mit Spin-Bahn-Wechselwirkung analytisch behandelt und auch bereits angedeutet,
dass sich dabei später einige - teils unlösbare - Probleme ergeben. Es kann passieren, dass man
bei analytischen Rechnungen an einen Punkt kommt, an dem ein Weiterrechnen nicht möglich
oder nicht praktikabel ist. Selbst mit einem guten Computeralgebrasystem wie Wolfram Mathematica werden wir für die orts- und zeitabhängige Spinpolarisierung keine exakte Lösung
finden. Man hat nun mehrere Möglichkeiten: zum einen kann man versuchen, einen anderen
analytischen und exakten Zugang zum Problem zu suchen, indem man beispielsweise einen anderen Lösungsansatz verwendet oder Symmetrien ausnutzt, wie wir es in den Abschnitten 3.1.3
und 4.1.3 versuchen werden. Eine andere Möglichkeit ist, zu versuchen, Näherungslösungen zu
erhalten, indem man beispielsweise Terme kleinen Betrags vernachlässigt. Auch diese Methode werden wir im späteren Verlauf dieser Arbeit verwenden. Bei Näherungslösungen stellt sich
aber das Problem, dass im Voraus oft nicht klar ist, ob diese überhaupt, und wenn ja, wie gut,
zum exakten Resultat passen.
Eine vollkommen andere Lösungsmöglichkeit stellt eine numerische Simulation dar. Analytische Lösungsversuche können schon bei kleinen Veränderungen des Ausgangsproblems unmöglich werden. Für numerische Simulationen stellt sich dieses Problem nicht und es ist meistens
durchaus möglich, beliebig komplizierte Sachverhalte korrekt abzubilden. Demgegenüber hat
die numerische Simulation das Problem der endlichen Genauigkeit: im konkreten Beispiel einer
Monte-Carlo-Simulation können nicht unendlich viele Elektronen simuliert werden und die erhaltenen Werte sind damit immer mit statistischem Rauschen behaftet. Zudem müssen bei einer
numerischen Simulation die Parameter im voraus festgelegt werden. Um die Auswirkungen von
Änderungen an den Parametern auf das Ergebnis zu untersuchen, muss die Simulation für verschiedene Werte der Parameter durchgeführt werden und auch dann können die Zusammenhänge
nur näherungsweise bestimmt werden. Nichtsdestotrotz stellt die Numerik ein sehr hilfreiches
Werkzeug dar, wenn komplizierte physikalische Probleme analysiert werden sollen.
In den folgenden Abschnitten soll nun beschrieben werden, wie das erstellte Computerprogramm das Modell aus dem vorherigen Abschnitt umsetzt. Das abgedruckte Computerprogramm
stellt dabei vereinfacht das reale Programm dar. Aufgrund der zahlreichen Parameter der Simulation und Optimierungen, wie der Berechnung auf mehreren CPU-Kernen, ist das reale Programm sehr viel komplizierter. Dabei kommen zu den Parametern des Modells (Wandabstand L,
Rashba-Parameter a, . . . ) noch zahlreiche Parameter, die nur für die Simulation relevant sind. Als
Beispiele sei hier die Anzahl der simulierten Elektronen oder die Größe der Zeitschritte, nach
denen die Spinpolarisierung gemessen wird, genannt. Da es bei einigen Details dieser MonteCarlo-Simulation verschiedene Möglichkeiten bei der Realisierung gibt, werden wir versuchen,
die Abläufe im Programm möglichst nachvollziehbar zu dokumentieren. Werden diese Details
auf andere Art und Weise realisiert, können sich kleinere oder größere Abweichungen in den
Ergebnissen zeigen. Im Fachpraktikum wurden beispielsweise signifikante Abweichungen im
Vergleich zu den Ergebnissen von Kiselev und Kim [KK00] festgestellt, die auf die etwas andere Umsetzung des Modells zuruckzuführen waren.
24
2.4. NUMERISCHE SIMULATION
KAPITEL 2. MODELL UND METHODEN
class Particle
{
VEC2
m_vPosition , m_vImpulse ;
VEC3
m_vSpin ;
REAL
m_fNextScattering ;
};
Listing 2.1: Klasse Particle
Initialisierung
Zu Beginn, also zur Zeit t = 0, wird eine Liste aller Elektronen erstellt. Jedes Elektron speichert
seinen gegenwärtigen Ort, Impuls und Spin, also die Werte seiner Freiheitsgrade. Da die Masse
auf 1 normiert wurde, ist dadurch auch die Geschwindigkeit definiert. Zusätzlich wird die Zeit
bis zur nächsten Streuung gespeichert. Die Streuwahrscheinlichkeit wird also nicht durch eine konstante Streuwahrscheinlichkeit in kleinen Zeitabschnitten dargestellt, sondern durch eine
Exponentialverteilung der Zeit zwischen zwei Streuungen. Dies ist ein Beispiel für ein Detail
der Simulation, bei der verschiedene Umsetzungen möglich wären. Die Klasse, die ein Elektron
repräsentiert ist in Listing 2.1 abgedruckt.
Die Vorgänge in der Simulation verlaufen analog zur analytischen Betrachtung in Abschnitt 2.3.
Bei der Initialisierung werden somit alle Elektronen auf den gleichen Punkt, den Ursprung, gesetzt. Die Impulse werden isotrop mit Länge 1 in der xy-Ebene verteilt. Dabei, und für alle
weiteren Zufallsprozesse, wird ein 64-Bit Mersene-Twister verwendet. Der Spin aller Elektronen wird in Richtung einer der Achsen initialisiert. Damit besteht anfangs eine vollständige
Spinpolarisierung des Systems. Die Zeit bis zur nächsten Streuung m_fNextScattering wird
mittels einer Exponentialverteilung initialisiert, deren Mittelwert der mittleren Zeit zwischen
zwei Streuungen τp = 1 entspricht.
Bewegung
Hier wird nun kurz beschrieben, wie das Programm einen Zeitschritt berechnet. Eine vereinfachte Version der Hauptschleife ist in Listing 2.2 abgedruckt. Es sei nochmals darauf hingewiesen,
dass der tatsächliche Code des Programms, unter anderem aufgrund von Optimierungen, wie
zum Beispiel der Verwendung mehrerer parallel laufender Threads, komplizierter ist. Das Programm wird wie im vorherigen Abschnitt beschrieben zum Zeitpunkt t = 0 initialisiert und ein
Parameter ∆t (im Code mit fMeasureInterval bezeichnet) gewählt, der angibt, in welchen
Zeitabständen eine „Messung“ im System durchgeführt wird, d.h. die Spinpolarisierung berechnet und gespeichert wird. Die gespeicherten Werte können dann später analysiert werden, um
zum Beispiel Relaxationszeiten des Systems zu berechnen.
Die Bewegung eines Elektrons besteht gemäß Modell, wie es am Anfang dieses Kapitels beschrieben wurde, aus drei voneinander getrennten Prozessen: der freien Bewegung, der Streuung
an einer Störstelle und der Kollision mit einer Wand. Diese drei Prozesse werden auch im Programm einzeln behandelt. Um nun vom Zeitpunkt t zum Zeitpunkt t+∆t zu kommen, werden, für
25
2.4. NUMERISCHE SIMULATION
KAPITEL 2. MODELL UND METHODEN
while (/* time remaining */)
{
for(/* each particle p */)
{
REAL fRemaining = fMeasureInterval ;
while ( fRemaining > 0.0)
{
REAL fNextWallCollision = p. GetNextWallCollision ();
if( fNextWallCollision < fRemaining &&
fNextWallCollision <= p. m_fNextScattering )
{
fRemaining -= fNextWallCollision ;
p. Advance ( fNextWallCollision );
p. Collide ();
}
else if(p. m_fNextScattering < fRemaining )
{
fRemaining -= p. m_fNextScattering ;
p. Advance (p. m_fNextScattering );
p. Scatter ();
}
else
{
p. Advance ( fRemaining );
fRemaining = 0.0;
}
}
}
Measure ();
}
Listing 2.2: Hauptschleife des Programms
26
2.4. NUMERISCHE SIMULATION
KAPITEL 2. MODELL UND METHODEN
void Particle :: Advance (REAL _fDelta )
{
m_vPosition += m_vImpulse /* / mass */ * _fDelta ;
VEC3 vOmega = fA * m_vImpulse . Cross (VEC3 (0, 0, 1))
+ MAT3(-fB1 + fB3 * pow2( m_vImpulse .y), 0, 0,
0, fB1 - fB3 * pow2( m_vImpulse .x), 0,
0,
0,
0) * m_vImpulse ;
+ vAngularVelocity ;
m_vSpin = MAT3 :: Rotation ( vOmega * _fDelta ) * m_vSpin ;
m_fNextScattering -= _fDelta ;
}
Listing 2.3: Methode Advance: freie Bewegung eines Elektrons
jedes Elektron nacheinander folgende Schritte durchgeführt, bis die Zeitspanne ∆t durchlaufen
wurde:
1. Es wird berechnet, wie lange es dauert, bis das Elektron bei geradliniger Bewegung auf
eine Wand trifft (fNextWallCollision).
2. Die verbleibende Zeit bis zur nächsten Streuung ist bekannt (p.m_fNextScattering).
3. Je nachdem welches Ereignis als nächstes auftritt - eine Kollision mit einer Wand oder die
Streuung an einer Störstelle - wird das Elektron die verbleibende Zeit bis zu diesem Ereignis bewegt (p.Advance()) und anschließend das Ereignis „durchgeführt“ (p.Collide()
oder p.Scatter()).
4. Die Schritte 1. bis 3. werden so lange wiederholt, bis beide Ereignisse nicht mehr im
gegenwärtigen Zeitschritt stattfinden. Dann wird das Elektron noch bis zum Ende des
Zeitschrittes bewegt und mit dem nächsten Elektron fortgefahren.
Die Wände sind senkrecht zur y-Achse orientiert und die Reflektion an diesen wurde in Kapitel 2 auf Seite 11 als instantan und elastisch definiert. Bei der Kollision eines Elektrons mit
einer dieser Wände in p.Collide() muss also lediglich das Vorzeichen der y-Komponente des
Impulses umgekehrt werden. Dies entspricht einer elastischen Reflektion des Elektrons an der
Wand mit dem Impulsübertrag ∆~p = 2(~p ·~ey ) ~ey auf die Wand. Hier zeigt sich der wichtigste Vorteil der numerischen Simulation gegenüber einer analytischen Betrachtung: das Hinzufügen von
Wänden lässt sich in wenigen Zeilen Programmcode bewerkstelligen, ohne das restliche Programm zu verändern. Das restliche Programm behält seine Gültigkeit, einzig, wenn ein Elektron
eine Wand erreicht, wird es reflektiert und ansonsten exakt gleich gerechnet. Würde man jedoch
versuchen, Wände mit in das analytische Modell aus Abschnitt 2.3 miteinzubeziehen, würde
27
2.4. NUMERISCHE SIMULATION
KAPITEL 2. MODELL UND METHODEN
man recht schnell scheitern. Wände lassen sich mit dem verwendeten analytischen Zugang nicht
behandeln.
Die Streuungen an Störstellen wurden bei der Definition des Modells in Kapitel 2 auf Seite 11 als instantan, elastisch und isotrop festgelegt. Somit wird in p.Scatter() der Impuls des
betreffenden Elektrons wie bei der Initialisierung neu gesetzt: zufällig isotrop in der xy-Ebene.
Die Zeit bis zur nächsten Streuung wird ebenfalls analog zur Initialisierung mit der selben Exponentialverteilung zufällig neu berechnet. Es ist anzumerken, dass ein Elektron bei Anwesenheit
eines elektrischen Feldes während der „freien“ Bewegung seinen Impuls ändert. Die Elastizität
der Streuung bedeutet, dass der Betrag des Impulses bei der Streuung unverändert bleibt. Eine
Streuung entspricht somit der Drehung des Impulsvektors um einen zufälligen Winkel. Im weiteren Verlauf dieser Arbeit werden wir auch inelastische Streuungen behandeln. In diesem Fall
nehmen wir an, dass das Elektron die gesamte, während der Bewegung im elektrischen Feld
erhaltene Energie wieder an die Störstelle abgibt und bewerkstelligen dies durch die Normalisierung des Impulsvektors bei einer Streuung.
In Listing 2.3 ist p.Advance() ohne elektrisches Feld abgedruckt. Diese Methode bewegt
ein Elektron um den Zeitschritt ∆ta und bedarf etwas genauerer Erklärung:
1. Die erste Zeile entspricht dem expliziten Euler-Verfahren angewandt auf die Bewegungsgleichung des Ortes (2.27):
~r(t + ∆ta ) = ~r(t) +
∆ta
~p(t)
m
(2.53)
Da die Masse auf 1 normiert wurde ist sie auskommentiert und der Impuls entspricht der
Geschwindigkeit.
~ ges (im Code vOmega genannt).
2. Die zweite Zeile berechnet die Winkelgeschwindigkeit ω
Dabei wurden die Normierungen der mittleren Zeit zwischen zwei Stößen τp und des
Impulses ~p verwendet.
3. Mit dieser Winkelgeschwindigkeit wird in Zeile 3 die Spinpräzession berechnet. Da wir
wissen, dass die Bewegungsgleichung des Spins (2.29) eine Rotation mit der Winkelge~ ges entspricht, wäre es ineffektiv, den Zeitschritt mit einer der üblichen
schwindigkeit ω
numerischen Methoden zur Lösung eines Anfangswertproblems zu berechnen. Wir würden damit einen unnötigen numerischen Fehler einführen. Stattdessen können wir direkt
die Drehung des Spins berechnen. Dazu wird die Rotationsmatrix R(~θ) verwendet, wie sie
schon bei der analytischen Betrachtung in Gleichung (2.38) auftauchte. Diese repräsentiert eine Drehung um den vektoriellen Winkel θ. Es ergibt sich:
~s(t + ∆ta ) = R(~
ωges ∆ta ) ~s(t)
(2.54)
4. Da die Methode das Elektron um die Zeit ∆ta „bewegt“, muss diese Zeit noch von der
verbleibenden Zeit bis zur nächsten Streuung subtrahiert werden.
Da sich der Impuls des Elektrons in Abwesenheit eines elektrischen Feldes während der Zeit ∆ta
nicht ändert, ist Gleichung (2.53) exakt im Rahmen der Gleitkommagenauigkeit und verursacht
28
2.4. NUMERISCHE SIMULATION
KAPITEL 2. MODELL UND METHODEN
~ ges bis auf Konstanten nur vom Imkeinen numerischen Fehler. Da die Winkelgeschwindigkeit ω
puls abhängt, ist auch diese während der freien Bewegung konstant. Somit ist Gleichung (2.54)
ebenfalls exakt. Wird ein externes elektrisches Feld mit einbezogen, so muss in p.Advance()
auch der Impuls gemäß der entsprechenden Bewegungsgleichung (2.28) geändert werden. Dies
verursacht einen numerischen Fehler für die anderen Freiheitsgrade und muss gegebenenfalls
durch Unterteilung des Zeitschritts ∆ta in kleinere Intervalle oder durch die Verwendung besser
geeigneter numerischer Methoden (zum Beispiel Runge-Kutta-Methoden) kompensiert werden.
Sind alle Elektronen abgearbeitet, wird die Messung (Measure()) durchgeführt und der Vorgang bis zum Ende der Simulation wiederholt. Die Messung ist im folgenden Abschnitt beschrieben.
Messung
Da wir im Programm eine Liste aller simulierten Elektronen verwalten, ist die Messung der
Spinpolarisierung sehr einfach: es muss lediglich der Spin aller Elektronen aufsummiert und
normiert werden. Die Spinpolarisierung hsi i berechnet sich wie folgt:
N−1
2 X
(s j )i
hsi i =
~N j=0
(2.55)
Der Index i steht hierbei für die Achse, in deren Richtung die Spins initialisiert wurden. j indiziert die simulierten Elektronen. Die Anzahl der simulierten Elektronen ist mit N bezeichnet. Zu
beachten ist, dass die eckigen Klammern h . i hier wieder den normierten Mittelwert über alle simulierten Teilchen bezeichnen und nicht den quantenmechanischen Erwartungswert. Aufgrund
der Normierung bedeutet eine Spinpolarisierung hsi i = 1 eine volle Polarisierung in Richtung
der Initialisierung, hsi i = −1 eine volle Polarisierung entgegen der Initialisierung und hsi i = 0
keine Polarisierung, d.h. die Spins der Elektronen heben sich auf. Die so berechneten Werte
der Spinpolarisierung werden nach jedem Zeitschritt ∆t in eine Datei gespeichert, um sie zum
Beispiel mit OracleLab Origin analysieren zu können.
Gleichung (2.55) beschreibt die globale, zeitabhängige Spinpolarisierung. Zuvor hatten wir
aber bei der analytischen Herangehensweise in Abschnitt 2.3 auch ortsabhängige Spinpolarisierungen betrachtet. Auch diese stellen für die numerische Simulation kein Problem dar. Wir
müssen lediglich das Raumgebiet in kleine Teile „zerschneiden“ und bei der Messung mit Gleichung (2.55) über alle Elektronen summieren, die sich in diesem Gebiet befinden. Die Form
der Gebiete legt die Ortsabhängigkeit fest. Wir werden dazu später beispielsweise konzentrische
Ringe verwenden, um die radiale Abhängigkeit der Spinpolarisierung zu untersuchen. Es muss
in der Simulation nur darauf geachtet werden, dass sich in jedem Raumgebiet relativ viele Elektronen befinden, da sonst das statistische Rauschen zu groß wird. Eine besondere Rolle spielt die
Anzahl der Elektronen N aus Gleichung (2.55): wenn wir an der Spinpolarisierung interessiert
sind, verwenden wir für N die Anzahl der Elektronen, über die wir mitteln, also die Anzahl der
Elektronen im betreffenden Gebiet. Es ist aber auch möglich die Spindichte, wie wir sie in Gleichung (2.52) bei der analytischen Betrachtung erhalten hatten, zu berechnen. Dazu verwendet
man für N weiterhin die Anzahl aller simulierten Elektronen und teilt noch durch die Größe des
Raumgebietes.
29
Kapitel 3:
Ladungsdynamik
KAPITEL 3. LADUNGSDYNAMIK
3. Ladungsdynamik
Wir haben nun das Modell definiert und einige analytische und numerische Vorarbeiten geleistet,
um die zeit- und optional auch ortsabhängige Spinpolarisierung eines Systems aus vielen Elektronen zu bestimmen. Wie bereits angedeutet wurde, lassen sich diese Rechnungen sehr leicht
auch auf die Ladung oder die Masse eines Elektrons übertragen. Der Spin eines quasiklassischen
Elektrons wird durch einen Vektor konstanter Länge ~/2 und freier Richtung beschrieben, wobei
die Zeitentwicklung dieses Vektors durch die Bewegungsgleichung des Spins (2.29) beschrieben wird. Im Gegensatz dazu ist eine Erhaltungsgröße wie die Ladung oder die Masse zeitlich
konstant - die Zeitableitung verschwindet:
d
q=0
dt
(3.1)
Hier steht q zwar für die Ladung des Elektrons, die folgenden Überlegungen gelten aber gleichermaßen für die Masse m. Man erhält diese Relation, wenn in Gleichung (2.29) die vektorielle
~ ges = 0 ist, was erreicht wird, wenn sowohl die quantenmechanischen
Winkelgeschwindigkeit ω
Effekte der Spin-Bahn-Wechselwirkung als auch das äußere Magnetfeld verschwinden. Damit
~ = 0. Da wir im gesamten Kapitel 2 keinerlei Annahmen über
sind a = b1 = b3 = 0 und B
diese Parameter getroffen haben, bleiben alle Rechnungen gültig, und man erhält Aussagen über
die Ladungs- oder Masseverteilung, indem man nichts weiter tut, als die aufgezählten Parameter
gleich Null zu setzen.
3.1. Dichteverteilung
3.1.1. Zeitabhängige Dichteverteilung
Mit den nun bekannten Informationen werden wir nun die Dichteverteilung unter den bereits
mehrfach angegebenen Bedingungen analysieren. Dabei werden wir sowohl das eindimensionale, als auch das zweidimensionale Elektronengas betrachten. Bevor wir uns allerdings die ortsabhängigen Dichte vornehmen, werden wir die rein zeitabhängige Dichte mit dem beschriebenen
analytischen Modell betrachten. Diese beschreibt, anschaulich erklärt, den Anteil der Elektronen, der zur Zeit t im System existiert. Da wir dem System weder Elektronen hinzufügen, noch
Elektronen entfernen, sollte das Resultat exakt 1 sein. Auch wenn dieses Resultat schon im
Voraus bekannt ist, verdeutlicht und überprüft die Rechnung den Lösungsansatz und soll somit
im Folgenden durchgeführt werden. Es werden die Gleichungen (2.41) und (2.48), sowie die
Definition von F(ω) in Gleichung (2.46) aus Abschnitt 2.3.2 verwendet:
R(t1 ) =
Z2π
dφ ~ ges ~p t1
R ω
2π
0
33
mit ~p = pF
cos φ sin φ
0
(3.2)
3.1. DICHTEVERTEILUNG
F(ω) =
KAPITEL 3. LADUNGSDYNAMIK
Z∞
mit p(t1 ) =
dt1 p(t1 ) eiωt1 R(t1 )
1 −t1 /τp
e
τp
(3.3)
0
U(t) = τp
Z∞
−1
dω −iωt
e F(ω) 1 − F(ω)
2π
(3.4)
−∞
hρ(t)i = U(t) hρ(0)i
(3.5)
~ ges = 0 setzten, erhält man für R(0) die EinheitsDa wir zur Untersuchung der Dichteverteilung ω
matrix und wir betrachten von nun an nur noch eine Komponente. Mit R(0) = 1 folgt R(t) = 1
und F(ω) lässt sich ausrechnen:
1
F(ω) =
τp
Z∞
dt1 e−t1 /τp eiωt1 =
1
1 − iτp ω
(3.6)
0
F(ω)
i
=
1 − F(ω) τp ω
(3.7)
Nun kann man mit dem Residuensatz
Z∞
X
dz f (z) = −2πi
Resa f (z),
(3.8)
a
−∞
wobei für t > 0 über die Polstellen a mit Im(a) ≤ 0 von f (z) summiert wird, Gleichung (3.4)
lösen. Wir berechnen mit der Polstelle bei
ω1 = 0
(3.9)
die Zeitentwicklung der Ladung und erhalten:
U(t) =
Z∞
ie−iωt
dω ie−iωt
= −i Resω1
= e−iω1 t = 1
2π ω
ω
(3.10)
−∞
Dieses Ergebnis entspricht genau unseren Erwartungen. Für diesen einfachen Fall liefert unsere
analytische Herangehensweise also fürs Erste das richtige Ergebnis. Dieses Ergebnis bestätigt
auch das Vorhandensein des Faktors τp in der Zeitentwicklung, wie es in Anhang A.2 beschrieben wurde. Hätten wir dort eine falsche Skalierung vorgenommen, würden wir hier einen zwar
konstanten aber von 1 verschiedenen Wert erhalten.
3.1.2. Eindimensionale Dichteverteilung
Der nächste logische Schritt ist es, die ortsabhängige Dichteverteilung zu betrachten, bei der wir
zuerst auf den eindimensionalen Fall eingehen werden. Es wird die Gleichung (2.52) sowie die
Definition von F ~k, ω in Gleichung (2.51) aus Abschnitt 2.3.3 verwendet:
1
F k, ω =
2
Z∞
dt1 p(t1 ) eiωt1
0
X
i
~ ges ~p t1
e m t1 kpx R ω
px =±pF
34
mit ~p =
px 0
0
(3.11)
3.1. DICHTEVERTEILUNG
U x, t = τp
Z∞
KAPITEL 3. LADUNGSDYNAMIK
dω −iωt
e
2π
−∞
Z∞
−1
dk −ikx
e F k, ω 1 − F k, ω
2π
(3.12)
−∞
ρ x, t = U x, t hρ(0, 0)i
(3.13)
Dabei wurden gemäß der eindimensionalen Betrachtung bereits die Vektoren ~k und ~r durch
~ ges = 0 erhält man:
entsprechende Skalare k und x ersetzt. Mit ω
1
F k, ω =
2
=
Z∞
dt1 p(t1 ) eiωt1
X
eivF t1 kd =
d=±1
0
Z∞
dt1 p(t1 ) eiωt1 cos (vF t1 k) =
0
iτp ω − i
(3.14)
(i + τp ω)2 − v2F τ2p k2
Für F k, ω /(1 − F k, ω ) erhält man also:
1 − iτp ω
F k, ω
= 2 2 2
1 − F k, ω
vF τp k − τp ω(i + τp ω)
(3.15)
Nun kann man mit den Polstellen bei
−i ± A
ω1,2 =
2τp
q
A = −1 + 4v2F τ2p k2
(3.16)
den Residuensatz anwenden, um das ω-Integral der Zeitentwicklung U x, t zu lösen:
Z∞
2
e−iωt F k, ω
dk −ikx X
U x, t = −iτp
e
Resωi
=
2π
1 − F k, ω
i=1
−∞
! sin tA
Z∞
2τp
dk −ikx − 2τt p
tA
cos
=
e e
+
2π
2τp
A
(3.17)
−∞
Hier ist man nun an einem Punkt angelangt, an dem man mit (exakten) analytischen Methoden nicht weiter kommt. Das Integral in dieser Form lässt sich nicht analytisch ausführen. Nun
hat man mehrere Möglichkeiten: man kann beispielsweise versuchen, das Integral numerisch zu
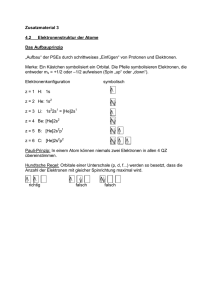
lösen. Hierzu summiert man in einer Art „brute-force“-Methode über viele Punkte des Integranden, um den Wert des Integrals anzunähern. Obwohl es sich hierbei um ein uneigentliches Integral handelt, kann es trotzdem möglich sein, dieses numerisch zu integrieren. In Abbildung 3.1
ist die Amplitude des Integranden abgedruckt. Man erkennt, dass für größere Zeiten die Oszillation immer schwächer wird und nur ein Peak bei k = 0 übrig bleibt. Somit kann man das
uneigentliche Integral durch eine Summation über einen endlichen Bereich annähern. Wir wählen eine automatisierte Lösung und lassen das Integral von Mathematica berechnen.
35
3.1. DICHTEVERTEILUNG
KAPITEL 3. LADUNGSDYNAMIK
t=5
1,0
t=10
0,8
0,6
0,4
0,2
0,0
-0,2
-10
-5
0
5
10
Integrationsvariable k
Abbildung 3.1.: Amplitude des Integranden aus Gleichung (3.17) für vF = 1, τp = 1 und zwei verschiedene Zeitpunkte t = 5 und t = 10
Eine andere Möglichkeit doch noch an analytische Ergebnisse zu kommen, ist es, Näherungen zuzulassen und kleine Terme zu vernachlässigen. Geht man in dieser Aufgabe davon aus,
dass die Zeit t bei der man die Ladungsverteilung ermitteln möchte, relativ groß gegenüber der
mittleren freien Flugzeit τp ist, dann kann man den Nenner von F k, ω nach ω entwickeln und
nur Terme bis zur Ordnung O(ω) berücksichtigen. Man erhält:
1 − v2F τ2p k2 + iτp ω
F k, ω
≈
1 − F k, ω
v2F τ2p k2 − iτp ω
(3.18)
ω1 = −iv2F τp k2
(3.19)
Mit der Polstelle bei
wendet man den Residuensatz an, um die ω-Integration durchzuführen, und berechnet unter
Zuhilfenahme von Mathematica, das k-Integral. Dies liefert:
Z∞
U x, t ≈ −iτp
e−iωt F k, ω
dk −ikx
e
Resω1
=
2π
1 − F k, ω
−∞
=
Z∞
−∞
−x2
4v2 τp t
F
(3.20)
dk −ikx −v2 τp k2 t
e
e e F
=
√
2π
2vF πτp t
Somit hat man eine geschlossene Näherungslösung für die zeit- und ortsabhängige Ladungsverteilung in einer Dimension berechnet. Diese Lösung entspricht genau der eindimensionalen
Normalverteilung
−x
1
e 4Dt
p(x) = √
4πDt
36
(3.21)
3.1. DICHTEVERTEILUNG
KAPITEL 3. LADUNGSDYNAMIK
0,8
0,08
t=5
t=20
Simulation
analytisch
analytisch
Näherung
Ladungsdichte
(x,t)
Näherung
(x,t)
0,6
Ladungsdichte
Simulation
0,07
0,4
0,2
0,06
0,05
0,04
0,03
0,02
0,01
0,0
0,00
-10
-5
0
5
10
Ort x
-20
-15
-10
-5
0
5
10
15
20
Ort x
Abbildung 3.2.: Eindimensionale zeit- und ortsabhängige Ladungsverteilung ρ x, t für vF = 1, τp = 1
und zwei verschiedene Zeitpunkte t = 5 (links) und t = 10 (rechts)
mit dem Diffusionskoeffizienten D = v2F τp . Ob diese Näherung die exakte Lösung auch wirklich
in gewissen Parameterbereichen beschreibt, soll nun geklärt werden. Dazu sind in Abbildung 3.2
die Resultate der drei Lösungsstrategien, Monte-Carlo-Simulation, analytisch mit numerischer
Integration und analytisch mit Näherung für zwei verschiedene Zeiten abgedruckt. Zuerst fallen
die zwei scharfen Peaks auf, die das Diagramm für den Zeitpunkt t = 5 bei x = 5 und x = −5
zeigt. Die Übereinstimmung dieser Zahlenwerte ist kein Zufall, sondern hat folgenden Ursprung:
am Anfang bewegen sich alle Elektronen ausgehend von x = 0 in entweder positiver oder negativer x-Richtung. Wären nun keine Störstellen vorhanden, so würden sich alle Elektronen
immer mit ihrer Anfangsgeschwindigkeit weiterbewegen und hätten immer genau den Abstand
vF t vom Ursprung. Dies ist die maximale Strecke, die ein Elektron mit Geschwindigkeit vF in
der Zeit t zurücklegen kann. Man würde nur die Peaks ohne das dazwischen liegende Kontinuum beobachten. Da die Elektronen nun aber gelegentlich gestreut werden, und somit ihren Weg
teilweise wieder zurück laufen, verringert sich für manche Elektronen der insgesamt zurückgelegte Weg und das Kontinuum entsteht, während die Höhe der Peaks mit der Zeit abnimmt.
Sowohl die Monte-Carlo-Simulation als auch die numerische Integration zeigen für beide Zeiten übereinstimmendes Verhalten. Dabei zeigt die numerische Integration für kleinere Zeiten
mehr Artefakte, insbesondere in der Umgebung der Peaks. Diese Resultieren aus dem endlichen Integrationsgebiet in Abbildung 3.1. Für größere Zeiten zeigt die Monte-Carlo-Simulation
hingegen mehr Ungenauigkeiten in Form von statistischem Rauschen. Die Ergebnisse ließen
sich jeweils verbessern, indem für die analytische Integration das Gebiet im k-Raum, und für
die Simulation die Anzahl der Elektronen N vergrößert würde. Im Gegensatz zu den anderen
beiden Methoden zeigt die Näherungslösung auch für kleine Zeiten keine Peaks, wobei sie für
Entfernungen |x| < vF t erstaunlich gut zu dem vorausgesagten Kontinuum passt, andererseits
aber für Orte |x| > vF t ebenfalls eine Aufenthaltswahrscheinlichkeit der Elektronen voraussagt,
obwohl dieser Bereich für die Elektronen unerreichbar ist. Für relativ große Zeiten stimmt die
Näherungslösung dann im gesamten Raumgebiet sehr gut zu den anderen beiden Lösungswe-
37
3.1. DICHTEVERTEILUNG
KAPITEL 3. LADUNGSDYNAMIK
gen. Dies deckt sich mit unseren Erwartungen, da wir bei der Näherung ja genau angenommen
hatten, dass t τp gilt.
3.1.3. Zweidimensionale Dichteverteilung
Nach der eindimensionalen Analyse werden wir uns nun der zeitabhängigen Dichteverteilung
eines Teilchens widmen, dass sich in zwei Dimensionen bewegt. Dabei werden letztlich die
gleichen Methoden, wie bei der eindimensionalen Betrachtung verwendet. Es sind jedoch kleinere Modifizierungen nötig, um zu einem Ergebnis zu gelangen. Wir haben im letzten Abschnitt
erkannt, dass sich selbst im eindimensionalen Fall nicht exakt lösbare Probleme ergeben. Es ist
nicht zu erwarten, dass die Probleme im zweidimensionalen Fall einfacher zu lösen sein werden. Eine Aspekt des Modells, den wir verwenden können, um das Problem zu vereinfachen,
stellt die Symmetrie dar. In der gesamten Definition des Modells gibt es keinen Aspekt, der
im eindimensionalen Fall die positive oder negative x-Richtung auszeichnen würde. Dementsprechend sind die erhaltenen Dichteverteilungen des letzten Abschnitts auch symmetrisch zum
Ursprung x = 0. Analog existiert auch im zweidimensionalen Fall ohne Wände keine Auszeichnung einer Richtung in der xy-Ebene. Die z-Richtung hingegen ist derart ausgezeichnet, dass die
Elektronen in dieser Richtung unbeweglich sind. Es liegt also eine bezüglich der z-Achse rotationssymmetrische Problemstellung vor, womit auch die daraus resultierende Dichteverteilung zu
dieser Achse rotationssymmetrisch sein muss. Infolgedessen liegt es nahe, bei der Beschreibung
auch rotationssymmetrische Koordinaten zu wählen. Dies betrifft die Ortskoordinaten ~r, sowie
deren Analogon in der Fouriertransformation ~k. Wir formulieren also die Gleichungen (2.51)
und (2.52) aus Abschnitt 2.3.3 in Polarkoordinaten und erhalten:
F k, ψ, ω =
Z∞
Z2π
iωt1
dt1 p(t1 ) e
0
U r, θ, t = τp
Z∞
−∞
dω −iωt
e
2π
0
∞
Z
0
dφ ivF t1 k cos(φ−ψ) ~ ges ~p t1
e
R ω
2π
dk
k
2π
Z2π
mit ~p = pF
cos φ sin φ
0
(3.22)
−1
dψ −ikr cos(ψ−θ)
e
F k, ψ, ω 1 − F k, ψ, ω
2π
(3.23)
0
~s r, θ, t = U r, θ, t ~s(0)
(3.24)
~ ges = 0 und damit R(~
Wir setzen nun ω
ωges ~p t) = 1 und beginnen nacheinander die Integrale
zu lösen. Der Kosinus im Exponenten des Winkelmittels in Gleichung (3.22) erzeugt die nullte
Besselfunktion erster Gattung J0 (siehe [AS65, S. 376]):
J0 (z) =
Z2π
dθ ±z cos θ
e
2π
0
38
(3.25)
3.1. DICHTEVERTEILUNG
KAPITEL 3. LADUNGSDYNAMIK
Man erhält:
F k, ψ, ω =
Z∞
Z2π
dt1 p(t1 ) e
0
=
Z∞
0
iωt1
dφ ivF t1 k cos(φ−ψ)
e
=
2π
0
(3.26)
i
dt1 p(t1 ) eiωt1 J0 (vF t1 k) = q
(i + τp ω)2 − v2F τ2p k2
F k, ψ, ω
i
=
q
1 − F k, ψ, ω
−i + (i + τp ω)2 − v2F τ2p k2
(3.27)
Das zweite Integral wurde mit Hilfe von Mathematica ausgeführt wurde. Es ist zu erkennen,
dass diese Größe nicht von ψ abhängt. Damit kann man das ψ-Integral in Gleichung (3.23)
unabhängig von F k, ψ, ω ausführen und erhält wieder die nullte Besselfunktion:
Z2π
dψ −ikr cos(ψ−θ)
e
= J0 kr
2π
(3.28)
0
Wir gehen weiter wie im eindimensionalen Fall vor und führen als nächstes die ω-Integration
mit den Polstellen bei
−i ± A
ω1,2 =
τp
q
A = −1 + v2F τ2p k2
(3.29)
unter Verwendung des Residuensatzes aus:
Z∞
2
e−iωt F k, ψ, ω
X
dk
U r, θ, t = −iτp
kJ0 kr
Resωi
=
2π
1 − F k, ψ, ω
i=1
0
− τtp
∞
tA
Z
2e
sin
τp
dk
kJ0 kr
=
2π
A
(3.30)
0
Obwohl dieses Ergebnis auf den ersten Blick relativ einfach aussieht, ist die Integrationsvariable
k hier an vier verschiedenen Stellen vorhanden und verhindert somit das geschlossene Lösen
des Integrals. k ist einmal linear, dann im Argument der Besselfunktion und schließlich auch
unter der Wurzel in A vorhanden. Damit können wir auch hier keine exakte, analytische Lösung
angeben und greifen wieder auf numerische und Näherungslösungen zurück. In Abbildung 3.3
ist die Amplitude des Integranden abgedruckt und man sieht wieder ein ähnliches Verhalten wie
beim eindimensionalen Fall: je größer t ist, desto mehr beschränkt sich die Amplitude auf einen
kleinen Bereich nahe k = 0. Somit lässt sich Gleichung (3.30) numerisch integrieren, indem man
39
3.1. DICHTEVERTEILUNG
KAPITEL 3. LADUNGSDYNAMIK
t=5
1,0
t=10
0,8
0,6
0,4
0,2
0,0
-0,2
0
2
4
6
8
10
Integrationsvariable k
Abbildung 3.3.: Amplitude des Integranden aus Gleichung (3.30) für vF = 1, τp = 1 und zwei verschiedene Zeitpunkte t = 5 und t = 10
über einen genügend großen Bereich summiert. Wir versuchen uns nun an der Näherungslösung
und entwickeln wieder F k, ψ, ω bis zur ersten Ordnung in ω. Es ergibt sich:
2 − v2F τ2p k2 + 2iτp ω
F k, ψ, ω
≈
1 − F k, ψ, ω
v2F τ2p k2 + 2iτp ω
(3.31)
Die Anwendung des Residuensatzes mit der Polstelle bei
1
ω1 = − iv2F τp k2
2
(3.32)
liefert:
U r, θ, t = iτp
Z∞
e−iωt F k, ψ, ω
dk
kJ0 kr Resω1
=
2π
1 − F k, ψ, ω
0
=
Z∞
0
−
r2
2v2 τp t
F
(3.33)
1 2 2
dk
e
kJ0 kr e− 2 vF τp k t =
2π
2πv2F τp t
Für die k-Integration wurde sich hier auf Mathematica verlassen. Damit hat man eine geschlossene Näherungslösung für die zeit- und ortsabhängige Dichteverteilung des zweidimensionalen
Elektronengases erhalten. Diese hat analog zum eindimensionalen Fall nun die Form einer zweidimensionalen Normalverteilung
p(r) =
1 − r2
e 4Dt
4πDt
(3.34)
wie sie sich auch aus der Lösung der Diffusionsgleichung ergibt, wobei D = 12 v2F τp den Diffu-
40
3.1. DICHTEVERTEILUNG
KAPITEL 3. LADUNGSDYNAMIK
0,010
0,10
t=3
t=20
Simulation
Simulation
analytisch
0,08
analytisch
0,008
Näherung
(r,t)
0,06
Ladungsdichte
Ladungsdichte
(r,t)
Näherung
0,04
0,006
0,004
0,02
0,002
0,00
0,000
0
1
2
3
4
5
Radius r
0
5
10
15
20
Radius r
Abbildung 3.4.: Zweidimensionale zeit- und ortsabhängige Ladungsverteilung ρ r, t für vF = 1, τp = 1
und zwei verschiedene Zeitpunkte t = 3 (links) und t = 10 (rechts)
41
3.2. ELEKTRISCHES FELD
KAPITEL 3. LADUNGSDYNAMIK
sionskoeffizienten bezeichnet. Das ist genau die Verteilungsfunktion, die man für einen zweidimensionalen Random Walk mit Schrittweite vF τp erwartet. Es bleibt noch zu bestätigen, dass
diese Lösung auch wirklich zum Modell passt. Die Ergebnisse aller drei Lösungsmethoden sind
in Abbildung 3.4 abgebildet. Da wir hier nun eine Verteilung in Abhängigkeit des Radius r beschrieben haben, machen negative Werte auf der x-Achse keinen Sinn. Abgesehen davon erhält
man ein sehr ähnliches Bild wie bei der eindimensionalen Dichteverteilung in Abbildung 3.2.
Für kleine Zeiten ergibt sich für die Simulation und die numerisch integrierte Lösung ein deutlicher Peak bei r = vF t. Die Ursache hierfür ist die gleiche wie im eindimensionalen Fall: viele
Elektronen wurden bis zu diesem Zeitpunkt noch nicht gestreut und haben somit alle exakt den
gleichen, maximal möglichen Abstand zum Ursprung. Es fällt allerdings auf, dass die Höhe des
Peaks um ein Vielfaches geringer ist, als noch im eindimensionalen Fall. Das liegt daran, dass
die nicht gestreuten Elektronen sich zwar alle im gleichen Abstand zum Ursprung befinden,
sich aber auch auf einen Kreis mit Umfang 2πvF t verteilen. Im eindimensionalen Fall waren
alle Elektronen auf zwei Punkte verteilt. Da der Umfang des Kreises, auf dem die Elektronen
nun verteilt sind, mit dem Radius und damit der Zeit größer wird, wird der Peak naturgemäß
kleiner, da wir die Verteilung pro Raumvolumen und nicht pro Radius angegeben haben. Die
Simulation und die numerisch integrierte Lösung zeigen zu beiden Zeiten in allen Raumbereichen übereinstimmendes Verhalten, wobei die numerische Integration wieder im Bereich des
Peaks mehr Ungenauigkeiten zeigt als die Simulation. Diese zeigt dagegen besonders in der Nähe des Ursprungs signifikantes statistisches Rauschen, was nicht verwunderlich ist, da sich hier
weniger Elektronen in einem bestimmten Abstand befinden als weiter vom Ursprung entfernt.
Zudem verteilen sich die Elektronen mit der Zeit in immer größerem Abstand zum Ursprung,
was das statistische Rauschen verstärkt. Die Näherungslösung zeigt auch diesmal keinen Peak
und eine Aufenthaltswahrscheinlichkeit bei r > vF t. Sie zeigt auch im zweidimensionalen Fall
das erwartete Verhalten: für kleine Zeiten sind die Abweichungen relativ groß - um so länger
die Elektronen Zeit haben, sich zu verteilen, umso besser passt die Näherungslösung. Umgekehrt sagt dies aus, dass sich die Verteilung der Elektronen mit der Zeit wie zu erwarten einer
Normalverteilung annähert.
3.2. Elektrisches Feld
Im nun folgenden Abschnitt soll analysiert werden, wie sich ein System unter Einfluss eines
äußeren elektrischen Feldes verhält. Es soll insbesondere untersucht werden, wie sich ein elektrisches Feld auf die Geschwindigkeit der einzelnen Elektronen und die Durchschnittsgeschwindigkeit aller Elektronen im System auswirkt. Dabei soll der gleiche Lösungsweg wie schon bei
der Beschreibung der Ladungsverteilung verwendet werden. Entgegen den bisherigen Betrachtungen ist nun die Bewegungsgleichung des Impulses (2.28) der Ausgangspunkt;
d
~p = qE~
dt
(3.35)
Wie auch bei den vorhergehenden Betrachtungen werden alle Elektronen zum Zeitpunkt t = 0
am Ort ~r = 0 mit zufällig in der xy-Ebene verteilten Impulsen initialisiert. Jedes einzelne Elektron bewegt sich dann eine nach Gleichung (2.36) exponentialverteilte Zeit lang, wobei es eine
42
3.2. ELEKTRISCHES FELD
KAPITEL 3. LADUNGSDYNAMIK
konstante Beschleunigung gemäß Gleichung (3.35) erfährt. Zum Zeitpunkt t hat es also den
Impuls
~
~p(t) = ~p(0) + qEt
(3.36)
und wird gestreut. Da wir die Streuung als instantan und elastisch definiert hatten, lässt sich der
Impuls nach der Streuung ~p0 (t) durch die Rotation des Impulses vor der Streuung ~p(t) um einen
zufälligen Winkel φ um die z-Achse beschreiben:
~p0 (t) = R φ~ez ~p(t)
(3.37)
Bisher hatten wir die Zeitentwicklung eines Elektrons von einer Streuung zur nächsten durch
eine Rotation des Spins mittels der Matrix R(~
ωges ~p t) dargestellt. Im jetzigen Fall müssen wir
allerdings die Verschiebung (3.35) und Rotation (3.37) des Impulses darstellen, würden dabei
jedoch gerne die Matrixschreibweise beibehalten, um zum Beispiel die sich ergebende geometrische Reihe wie in Gleichung (2.48) berechnen zu können. Dies lässt sich mit homogenen
Koordinaten bewerkstelligen.
3.2.1. Homogene Koordinaten
Homogene Koordinaten werden in der projektiven Geometrie und häufig in der Computergrafik
eingesetzt. Sie haben unter Anderem genau den Zweck, auch Verschiebungen durch Matrixmultiplikationen darstellen zu können und folgen einem sehr einfachen Grundprinzip: Vektoren im
dreidimensionalen Raum bestehen aus drei Komponenten x, y und z, eine für jede euklidische
Raumrichtung. Um nun Verschiebungen darstellen zu können, fügt man eine vierte Koordinate w
hinzu und jeder homogene Vektor
x
y
~v =
(3.38)
z
w
beschreibt von nun an per Definition den Punkt
x
1
~r = y
w
z
(3.39)
im euklidischen Raum. Legt man die zusätzliche Koordinate w nun auf immer 1 fest, lässt sich
eine Verschiebung durch eine Matrixmultiplikation darstellen:
1 0 0 b x a x a x + b x
0 1 0 by ay ay + by
~
~r = ~a + b → ~r =
(3.40)
=
0 0 1 bz az az + bz
1
0 0 0 1 1
43
3.2. ELEKTRISCHES FELD
KAPITEL 3. LADUNGSDYNAMIK
Diese stark vereinfachte Erläuterung der Funktionsweise homogener Koordinaten ist für unsere
Zwecke ausreichend und es kann mit der Berechnung des Modells fortgefahren werden. Es soll
jedoch nicht der Anspruch erhoben werden, diese wenigen Zeilen können das Konstrukt der
homogenen Koordinaten vollständig beschreiben.
Wir beschreiben also die Beschleunigung (3.35) und die Drehung (3.37) in homogenen Koordinaten und nehmen ohne Beschränkung der Allgemeinheit E~ = Ex~ex an. Die Streuung wird
dann durch
qEx t
0
~p(t) = ~p(0) +
(3.41)
= A(t)~p(0)
0
0
1 0 0 qEx t
0 1 0
0
A(t) =
0 0 1
0
0 0 0
1
und die Rotation durch
~p0 (t) = R(φ~ez )~p(t)
cos φ − sin φ
sin φ cos φ
R(φ~ez ) =
0
0
0
0
(3.42)
0
0
1
0
0
0
0
1
beschrieben. Nun hatten wir am Anfang des Abschnitts beschrieben, dass ein Elektron zuerst
beschleunigt und dann gestreut wird. Intuitiv würde man also den homogenen Impuls ~p von
links zuerst mit der homogenen Matrix A(t) und dann mit R(φ~ez ) multiplizieren. Wenn wir allerdings dann den mittleren Impuls des Systems mit dem Winkelmittel über φ bilden, würde damit
die Streuung die Beschleunigung immer direkt neutralisieren, bevor wir den mittleren Impuls
im System „messen“. Die Lösung ist, zuerst mit R(φ~ez ) und dann mit A(t) zu multiplizieren.
Konzeptuell macht das keinen Unterschied, da Streuung und Beschleunigung ohnehin abwechselnd auftreten. Die Elektronen werden also alle zum Zeitpunkt t = 0 gestreut und dann erneut
beschleunigt. Die gleichzeitige Streuung aller Elektronen zum Zeitpunkt t = 0 stellt im allgemeinen Fall einen Fehler dar. Geht man allerdings von einem verschwindenen mittleren Impuls
zu diesem Zeitpunkt ~p(0) = 0 aus, hat die Streuung zu diesem Zeitpunkt keine Wirkung:
0 0
0 0
0
~p (0) = R(φ~ez ) =
0 0
1
1
44
(3.43)
3.2. ELEKTRISCHES FELD
KAPITEL 3. LADUNGSDYNAMIK
Wir können somit keine initiale, nicht verschwindende, mittlere Geschwindigkeit berücksichtigen, da diese mit der ersten Streuung bei t = 0 sofort verschwindet. Bisher sind wir aber ohnehin
von einer isotropen Impulsverteilung bei der Initialisierung des Systems ausgegangen. Für ein
einzelnes Elektron erhält man:
cos φ − sin φ 0 qEx t
sin φ cos φ 0
0
~p(t) = A(t)R(φ~ez )~p(0) =
(3.44)
~p(0)
0
0
1
0
0
0
0
1
3.2.2. Anisotrope Streuung
Bisher sind wir bei allen Untersuchungen von einer isotropen Streuung ausgegangen, d.h. die
Wahrscheinlichkeit, des Streuwinkels φ ist gleichverteilt auf dem Intervall [0, 2π). Wir wollen
das Verhalten eines Systems unter Einfluss eines äußeren elektrischen Feldes später auch mit der
Möglichkeit anisotroper Streuung behandeln. Die Berücksichtigung einer anisotropen Streuung
verkompliziert die folgenden Rechnungen nur unwesentlich. Um uns die zweimalige Berechnung des gleichen Sachverhalts zu ersparen, werden wir anisotrope Streuvorgänge gleich mit
einbeziehen, ohne zuerst den vermeintlich einfacheren Fall isotroper Streuung zu betrachten.
Der erste Schritt bei unserem analytischen Lösungsweg war bisher immer, das Winkelmittel
über R(~
ωges ~p t) zu bilden. Da wir in diesem Abschnitt mit φ in R(φ~ez ) den Streuwinkel und
nicht wie in den vorhergehenden Betrachtungen die Richtung von ~p beschreiben, haben wir
bei der Berücksichtigung einer anisotropen Streuung leichtes Spiel: es genügt das Winkelmittel
mit einer Gewichtung w(φ) zu versehen. Diese Gewichtung ist die Wahrscheinlichkeit, dass ein
Elektron bei der betrachteten Streuung um den Winkel φ abgelenkt wird. Ein konstanter Wert
von 1 entspricht isotroper Streuung. Damit erhalten wir eine ähnliches Integral wie das bisher
schon vorkommende gewichtete Zeitintegral mit der exponentialverteilten Gewichtung p(t):
hhcos φii − hhsin φii
Z2π
dφ
hhsin φii hhcos φii
R(t1 ) =
w(φ)A(t1 )R(φ~ez ) =
2π
0
0
0
0
0
hhcos φii =
Z2π
dφ
w(φ) cos(φ)
2π
hhsin φii =
Z2π
0 qEx t1
0
0
1
0
0
1
(3.45)
dφ
w(φ) sin(φ)
2π
0
0
R 2π
Dabei wurde angenommen, dass die Wahrscheinlichkeit normiert ist, d.h. dass 0 dφw(φ) = 2π
gilt. Außerdem bezeichnet hhcos φii den Anteil der Vorwärtsstreuung. Die doppelten spitzen
Klammern hh . ii stehen für das gewichtete Winkelmittel. Ein Wert hhcos φii > 0 beschreibt bevorzugte Vorwärtsstreuung, wohingegen ein Wert hhcos φii < 0 für bevorzugte Rückstreuung
steht. Demgegenüber beschreibt hhsin φii die Verteilung der Streuung in Richtung senkrecht
zu ~p. Ein von Null verschiedener Wert beschreibt also ein Modell, in dem die Elektronen bevorzugt nach rechts oder links gestreut werden. Obwohl ein solches Modell theoretisch möglich
45
3.2. ELEKTRISCHES FELD
KAPITEL 3. LADUNGSDYNAMIK
ist und mit der hier aufgezeigten Methode auch berechnet werden kann, ist es in der Praxis
von nachrangiger Bedeutung und wir werden im Folgenden immer von hhsin φii = 0 ausgehen. Wir nehmen also an, dass die Streuung symmetrisch bezüglich rechts und links ist. Die
Wertebereiche von hhcos φii und hhsin φii sind, da w(φ) nicht-negativ und normiert ist, jeweils
durch das Intervall [−1, 1] gegeben. Die weiteren Rechnungen verlaufen analog zum Vorgehen
in Abschnitt 2.3:
ihhcos φii
qEx τp
i+τ ω
0
0
−
(i+τp ω)2
p
∞
Z
ihhcos φii
0
0
0
i+τp ω
F(ω) =
dt1 p(t1 ) eiωt1 R(t1 ) =
(3.46)
1
0
0
0
iτ
ω−1
p
0
1
0
0
0
iτp ω−1
−1
F(ω) 1 − F(ω)
φii
− hhcos
hhcos φii−1+iτp ω
0
=
0
0
iqEx
− ω(hhcos φii−1+iτ
p ω)
0
0
φii
− hhcoshhcos
φii−1+iτp ω
0
0
i
τp ω
0
0
0
i
τp ω
0
(3.47)
Da wir uns auf einen verschwindenden mittleren initialen Impuls festgelegt haben, liefert nur
die vierte Spalte einen Beitrag zum Ergebnis. Es bleibt die ω-Integration auszuführen. Die
(4,4)-Komponente dieser Matrix wurde bereits in Abschnitt 3.1.1 integriert und liefert erwartungsgemäß 1. Damit bleibt die w-Komponente der homogenen Koordinaten unverändert. Wir
integrieren die verbleibende (1,4)-Komponente und erhalten mit den Polstellen bei
ω1 = 0
i hhcos φii − i
ω2 =
τp
(3.48)
(3.49)
und dem Residuensatz:
U(t)14 = −iτp
2
X
i=1
Resωi
e−iωt
qEx
=
ω(hhcos φii − 1 + iτp ω)
φii)t − (1−hhcos
τp
qEx τp 1 − e
1 − hhcos φii
(3.50)
Dieses Ergebnis repräsentiert den zeitabhängigen mittleren Impuls in x-Richtung eines Systems
mit anisotroper Streuung. Es ist bemerkenswert, dass, obwohl wir über die Form der Anisotropie noch keinerlei Aussagen gemacht haben, ein derart einfaches Ergebnis erhalten wurde. Die
Anisotropie beeinflusst das Ergebnis nur in Form des Anteils der Vorwärtsstreuung hhcos φii.
In Abbildung 3.5 sind die Ergebnisse aus Gleichung (3.50) zunächst für eine isotrope Streuung
w(φ) = 1 grafisch dargestellt. Das Ergebnis der Monte-Carlo-Simulation ist in Grau eingezeichnet und deckt sich bis auf minimales statistisches Rauschen perfekt mit der analytischen Lösung.
Man sieht, dass es sich bei allen vier Parameterwahlen jeweils um ein beschränktes Wachstum
handelt. D.h. für kleine Zeiten nimmt der mittlere Impuls schnell zu, für größere Zeiten stellt sich
dann eine Sättigung ein. Der Sättigungswert und die Zeit bis dieser „erreicht“ wird hängen von
den Parametern ab. Betrachtet man Gleichung (3.50) genauer, dann war dieses Ergebnis abzusehen: der relevante Teil der Formel ist die verschobene Exponentialfunktion 1 − e−At und diese
46
3.2. ELEKTRISCHES FELD
KAPITEL 3. LADUNGSDYNAMIK
E =1,
x
4
E =2,
x
E =1,
x
x
mittlerer Impuls <p (t)>
x
E =2,
3
p
p
p
p
=1
=1
=2
=2
Simulation
2
1
0
0
2
4
6
8
10
Zeit t
Abbildung 3.5.: Mittlerer Impuls hpx (t)i in x-Richtung eines Systems mit äußerem elektrischen Feld und
isotroper Streuung für verschiedene Werte von Ex und τp mit vF = 1
beschreibt genau das beobachtete Verhalten. Alle Parameter außerhalb der Exponentialfunktion
sind zeitlich konstant. Die Rate, mit der der mittlere Impuls seinen Sättigungswert erreicht, ist
durch den Vorfaktor des Exponenten −(1 − hhcos φii)/τp gegeben. Der Sättigungswert wird für
t → ∞ erreicht und beträgt:
px (t → ∞) =
qEx τp
1 − hhcos φii
(3.51)
Dieser Sättigungswert definiert die Driftgeschwindigkeit vD und damit die Drude-Leitfähigkeit:
vD =
px (t → ∞)
m
σ=
q2 nτp
qnvD
=
Ex
(1 − hhcos φii)m
(3.52)
Hier steht n für die Ladungsträgerdichte. Damit haben wir analytisch und ohne Näherungen
die Driftgeschwindigkeit und Drude-Leitfähigkeit für anisotrope Streuungen berechnet. Unser
Ergebnis wird zum Beispiel in [Eck88, S. 85] bestätigt. Im Gegensatz zu unserem Zugang wurde
dort jedoch die Boltzmann-Gleichung verwendet und es ist beruhigend zu wissen, dass unser
grundlegend anderer Lösungsansatz zum gleichen Ergebnis führt.
Es sollen nun verschiedene anisotrope Streuungen betrachtet werden um unser Ergebnis zu
analysieren. Wir wählen also drei verschiedene Winkelverteilungsfunktionen:
w1 (φ) = 1 + cos φ
w2 (φ) = (1 + cos φ) 1 + cos(3φ)
φ
1 + , 10 π − 1 mod 2 < 1
w3 (φ) =
1 − , sonst
2
hhcos φii2 =
2
!
q
q
√
√
√ hhcos φii3 = 2 + 2 5 − 2(5 − 5) − 2(5 + 5) ≈
π
≈ 0,1 hhcos φii1 =
(3.53)
(3.54)
(3.55)
Dabei stellt w1 (φ) die einfachste Möglichkeit dar, in hhcos φii einen nicht verschwindenen Wert
47
3.2. ELEKTRISCHES FELD
KAPITEL 3. LADUNGSDYNAMIK
Abbildung 3.6.: Beispielhafte Winkelverteilungsfunktionen der
(3.55) (rechts) mit Anisotropieparameter = 0,5
2,0
Gleichung
bis
p ( )
1
1
p ( )
1,8
p ( )
1,8
2
2
p ( )
p ( )
3
1,6
3
1,6
Simulation
1,4
1,2
1,4
1,2
1,0
1,0
0,8
0,8
0,6
0,6
-0,5
0,0
p ( ) (skaliert)
3
Leitfähigkeit
Leitfähigkeit
(links)
2,0
p ( )
-1,0
(3.53)
0,5
1,0
Anisotropieparameter
-1,0
-0,5
0,0
0,5
1,0
Anisotropieparameter
Abbildung 3.7.: Leitfähigkeit σ eines Systems mit äußerem elektrischen Feld und anisotroper elastischer (links) und inelastischer Streuung (rechts) für verschiedene Winkelverteilungen
(τp = 1, m = 1, q = 1 und n = 1)
zu erhalten. Die beiden anderen Winkelverteilungsfunktionen sind willkürlich gewählt. Bei allen drei Funktionen ist die Stärke der Anisotropie über den Parameter ∈ [−1, 1] einstellbar,
wobei die Funktionen so gewählt sind, dass die Normierung für jeden Wert von gilt. Die Abbildung 3.6 stellt die drei Funktionen in Polarkoordinaten dar.
Wir möchten nun untersuchen, wie sich verschiedene Verteilungsfunktionen auf das Verhalten
des Systems, insbesondere auf die Leitfähigkeit auswirken. Dazu berechnen wir die Leitfähigkeit
für die drei Beispiele der Anisotropie in Abhängigkeit des Anisotropieparameters . Das linke
Diagramm in Abbildung 3.7 zeigt das Resultat, wobei die Ergebnisse der Simulation wieder in
Grau eingezeichnet sind. Auch hier stimmen die Ergebnisse der analytischen Rechnung und der
numerischen Simulation wieder bis auf minimale statistische Abweichungen überein. Da die
Leitfähigkeit nur von hhcos φii und nicht von der genauen Form der Winkelverteilungsfunktion
abhängt, stimmen, wie zu erwarten war, auch die Graphen für w1 (φ) ud w2 (φ) perfekt überein.
Das trifft auch für die numerische Simulation mit den beiden Winkelverteilungsfunktionen zu:
48
3.2. ELEKTRISCHES FELD
KAPITEL 3. LADUNGSDYNAMIK
zwar sind die einzelnen Graphen nicht zu unterscheiden, aber es sind im Diagramm die beide
numerisch berechneten Graphen, der für w1 (φ) und der für w2 (φ) eingezeichnet.
Als nächstes werden wir die Forderung elastischer Streuung aufgeben und uns ein System
mit inelastischen Streuungen ansehen, bei dem der Impulsbetrag der Elektronen bei jeder Streuung wieder auf pF gesetzt wird. Ein Elektron gibt also bei der Streuung genau die Energie, die
es durch das elektrische Feld seit seiner letzten Streuung erhalten hat, wieder ab. In Formeln
ausgedrückt schreibt sich dies als:
pF
R(φ~ez )~p(t)
~p0 (t) = ~p0 (t)
(3.56)
Es ist nun leider nicht möglich den (inversen) Betrag eines Vektors durch eine Matrixmultiplikation zu berechnen. An dieser Stelle kommen wir mit unserem analytische Modell also nicht weiter. Es handelt sich somit um eine Problemstellung, die wir nur mit der Monte-Carlo-Simulation
berechnen können. Für die numerischen Simulation stellt die Normierung eines Vektors selbstverständlich kein Problem dar und lässt sich in einer Zeile erledigen. Die Ergebnisse der Simulation sind im rechten Diagramm in Abbildung 3.7 dargestellt. Es fallen auf den ersten Blick
mindestens zwei Dinge auf: einmal verlaufen alle Graphen durch den Punkt (0,1). D.h. dass für
einen Anisotropieparameter = 0 die Leitfähigkeit genau 1 beträgt, und zwar unabhängig von
der Verteilungsfunktion. Dabei spielt es keine Rolle, dass w2 (φ) auch für = 0 drastisch von
eine isotropen Streuung abweicht. Die Leitfähigkeit für = 0 und damit hhcos φii = 0 entspricht
unabhängig von der tatsächlichen Verteilungsfunktion immer der Leitfähigkeit eines Systems
mit isotroper Streuung. Zum Anderen fällt sofort auf, dass die Auswirkungen einer bevorzugten
Vorwärts- oder Rückwärtsstreuung sehr viel geringer sind, als bei einem System mit elastischer
Streuung. Wir haben im Diagramm außerdem den grünen Graphen für w3 (φ) um den Faktor 5
in x-Richtung gestaucht. Dies bildet hhcos φii3 auf hhcos φii1,2 ab. Der gestauchte Graph in Cyan für w3 (φ) und die Graphen für w1 (φ) in Rot und w2 (φ) in Grün liegen genau aufeinander.
Dies rechtfertigt die Behauptung, dass die Leitfähigkeit σ auch im Falle inelastischer Streuung
nur von hhcos φii abhängt. Die geringere Steigung der Graphen und der Schnittpunkt bei (0,1)
deuten an, dass man das Resultat mit inelastischer Streuung durch eine Skalierung entweder
in x- oder y-Richtung bezüglich des Schnittpunktes aus dem analytischen Ergebnis für elastische Streuung erhalten könnte. Dies stellt sich jedoch als falsch heraus - die Graphen können
so nicht zur Deckung gebracht werden. Wenn man eine unabhängige Skalierungen in x- und
y-Richtung zulässt, lassen sich die Ergebnisse aufeinander abbilden. Die Skalierungskonstanten für die verschiedenen Verteilungsfunktionen stimmen allerdings nicht überein. Es zeigt sich
hier ein Nachteil einer numerischen Simulation: wir haben zwar ein Ergebnis erhalten und können auch davon ausgehen, dass es für das angegebene Modell und die angegebenen Parameter
korrekt ist, die Interpretation bereitet jedoch Schwierigkeiten.
49
Kapitel 4:
Spindynamik
KAPITEL 4. SPINDYNAMIK
4. Spindynamik
Im letzten Kapitel haben wir uns mit der Ladungsdynamik beschäftigt. Nun soll das Hauptaugenmerk in dieser Arbeit aber auf der Spindynamik liegen. Dieser werden wir uns in diesem Kapitel
widmen. Die Ladungsdynamik wurde in dieser Arbeit unter anderem deshalb mit einbezogen,
weil wir deren Resultate, insbesondere bei der ortsaufgelösten Betrachtung in den Abschnitten 4.1.2 und 4.1.3, wieder benötigen werden. In den nächsten zwei Abschnitten werden wir im
Modell aus Kapitel 2 untersuchen, wie sich ein in das Elektronensystem injizierter Spin im Lauf
der Zeit verändert. Dies war die ursprüngliche Intention des Modells - dass es sich auf auf die
Ladungsdynamik anwenden lässt, war eher ein Bonus. Wir werden uns wieder zuerst die reine
Zeitauflösung vornehmen und dann die Ortsauflösung mit einbeziehen. In den darauf folgenden
Abschnitten werden wir nacheinander verschiedene Verallgemeinerungen des Modells betrachten und die Auswirkungen untersuchen. Es wird teilweise möglich sein analytische Lösungen zu
finden, teilweise wird der analytische Rechnenweg aber auch schnell auf Hindernisse treffen, die
nicht einfach zu überwinden sind. Zusätzlich werden, wie auch schon im letzten Kapitel, immer
die Ergebnisse der numerischen Simulation betrachtet. In den Fällen, in denen man analytische
Ergebnisse erhalten hat, kann man diese somit überprüfen. In Fällen, in denen die analytische
Herangehensweise versagt, liefert die Simulation trotzdem verlässliche Resultate.
4.1. Quasiklassische Spinrelaxation
4.1.1. Zeitaufgelöste Betrachtung
Die nachfolgenden Sachverhalte in diesem Abschnitt wurden teilweise bereits im Fachpraktikum
und in der Projektarbeit behandelt. Der Fokus im Fachpraktikum lag dabei auf der numerischen
Simulation eines zweidimensionalen Elektronengases mit Wänden, wobei zuerst auch auf das
System ohne Wände eingegangen wurde. Dies entspricht dem Modell, das in diesem Abschnitt
behandelt wird. In der Projektarbeit wurde dann erstmals die analytische Herangehensweise an
das Problem entwickelt, wie sie in Abschnitt 2.3 beschrieben wurde. Trotzdem sollen auch das
zweidimensionale Elektronengas ohne Wände mit reiner Zeitauflösung hier nochmals detailliert
beschrieben werden, da es die einfachste Variante des Modells darstellt und somit die Grundlage
für alle späteren Veränderungen bildet.
Der Rechenweg wurde in Abschnitt 2.3 bereits ausführlich beschrieben und in Abschnitt 3.1.1
für die zeitabhängige Ladungsdichte auch schon angewandt. Wir haben dabei nur das Ergebnis
erhalten, dass die Gesamtladung im System konstant ist, d.h. dass alle Elektronen zu jedem
Zeitpunkt im System vorhanden sind. Da wir zu keinem Zeitpunkt Elektronen vernichten oder
erzeugen und die Ladung des Elektrons eine Erhaltungsgröße darstellt, ist dieses Ergebnis, obwohl unspektakulär, nur logisch. Wir werden nun den gleichen Rechenweg beschreiten, mit
~ ges ~p nicht gleich Null und damit R(~
dem Unterschied, dass wir ω
ωges ~p t1 ) nicht gleich 1 set-
53
4.1. QUASIKLASSISCHE SPINRELAXATION
KAPITEL 4. SPINDYNAMIK
3,0
b =0
1
b =0.5
Winkelgeschwindigkeit |
ges
|
1
2,5
b =1
1
b =2
1
2,0
1,5
1,0
0,5
0,0
0
45
90
135
180
W inkel
225
270
315
360
[°]
Abbildung 4.1.: Winkelgeschwindigkeit |~
ωges ~p | für verschiedene Werte von b1 mit a = 1 in Abhängigkeit der Richtung des Impulses φ
zen werden. Wir versuchen uns zuerst an einem System mit Rashba- und linearer DresselhausSpin-Orbit-Wechselwirkung, da wir schon vermuten, dass der kubische Term des DresselhausEffektes schwieriger zu beschreiben wäre, d.h. wir setzen b3 = 0. Die vektorielle Winkelgeschwindigkeit beträgt also gemäß Gleichung (2.29):
1 −1 0 0
~ ges ~p =
a~p × ~ez + b1 0 1 0 ~p
ω
(4.1)
0 00
τp |~p|
Hier trifft man nun aber schon auf das erste gravierende Problem. Die Länge der vektoriellen
Winkelgeschwindigkeit beträgt
q
cos φ 1
ω
~ ges ~p =
(4.2)
a2 − b21 − 2ab1 sin(2φ) mit ~p = pF sin φ
τp
0
und ist damit nicht konstant bezüglich φ. In Abbildung 4.1 ist die Winkelgeschwindigkeit |~
ωges ~p |
für verschiedene Werte von b1 /a in Abhängigkeit von φ aufgetragen. Das Winkelmittel liefert
folglich Integrale der Form
R(t1 )33 =
Z2π
dφ
t1
cos
2π
τp
!
q
2
2
a + b1 + 2ab1 sin(2φ)
(4.3)
0
und wir kommen im allgemeinen Fall nicht weiter. Für a = 0 bzw. b1 = 0 vereinfacht sich
die Wurzel zu b1 bzw. a. Dies entspricht ausschließlicher Rashba- oder Dresselhaus-Spin-BahnWechselwirkung. Wir werden uns in diesem und den folgenden zwei Abschnitten auf den RashbaEffekt beschränken. Auch für a = b1 , also wenn Rashba- und Dresselhaus-Effekt exakt die gleiche Stärke haben, lässt sich das Integral lösen. Diesen Fall werden wir in Abschnitt 4.3 genauer
untersuchen.
54
4.1. QUASIKLASSISCHE SPINRELAXATION
KAPITEL 4. SPINDYNAMIK
Wir setzen also vorerst auch b1 = 0 und erhalten einen konstanten Betrag der Winkelgeschwindigkeit von a/τp . Damit lässt sich das Winkelmittel berechnen und man erhält:
at 1
1
1
+
cos
0
0
2π
τp
Z
2
dφ
at1
1
~ ges ~p t1 =
R(t1 ) =
R ω
(4.4)
0
0
2 1 + cos τp
2π
0
0
0
cos atτp1
Hier fällt sofort auf, dass man eine diagonale Matrix erhalten hat. Somit sind auch in allen weiteren Betrachtungen die einzelnen Komponenten unabhängig. Anschaulich erklärt bedeutet das,
dass eine globale Spinpolarisierung entlang einer der Achsen ihre Richtung beibehält, dass sich
also aus einer globalen Spinpolarisierung in eine bestimmte Richtung keine Spinpolarisierung
in eine andere Richtung entwickeln kann. Außerdem sei noch erwähnt, dass man für ausschließliche Dresselhaus-Spin-Bahn-Wechselwirkung das gleiche Ergebnis erhält. Damit sind die folgenden Überlegungen auch für den Fall a = 0 und b1 , 0 gültig. Auch das Zeitintegral lässt sich
ohne Probleme berechnen, da sowohl die Exponentialverteilung p(t1 ) als auch jeder Kosinus in
R(t1 ) durch Exponentialfunktionen darstellbar ist, über welche sich leicht integrieren lässt. Wir
geben hier aus Platzgründen nur noch die Diagonalelemente für die x-Richtung F(ω)11 und die
z-Richtung F(ω)33 an. Die y-Richtung verhält sich exakt wie die x-Richtung. Wir bearbeiten die
Komponenten einzeln, beginnen aufgrund der einfacheren Rechnung mit der z-Richtung und
erhalten:
F(ω) =
Z∞
dt1 p(t1 ) eiωt1 R(t1 )
⇒
F(ω)33 =
0
i + τp ω − 1
(i + τp ω)2 − a2
(4.5)
Der nächste Schritt, F(ω)/(1 − F(ω))−1 zu bilden, kann aufgrund der Diagonalität von R(t1 ) und
damit auch F(ω) elementweise ausgeführt werden:
1 − iτp ω
F(ω)33
= 2
1 − F(ω)33 a − τp ω(i + τp ω)
(4.6)
Nun fehlt nur noch die ω-Integration und wir erhalten die gesuchte Zeitentwicklung der Spinpolarisierung in z-Richtungen. Diese Integration lässt sich zum Beispiel mit Mathematica automatisiert ausführen. Um jedoch ein etwas tieferes Verständnis für das Resultat zu erhalten, ist es
hilfreich hier von Hand zu rechnen. Wir verwenden wieder den Residuensatz, müssen also über
die Polstellen von Gleichung (4.6) summieren. Diese finden wir an den Stellen, an denen der
Nenner Null wird:
a2 − τp ω(i + τp ω) = 0
(4.7)
Bevor wir weiterrechnen, werfen wir einen Blick in eine Arbeit von Raimondi u. a. [Rai+06]. Sie
berechnen das gleiche Modell wie wir mittels quasiklassischer Greenscher Funktionen und erhalten für die Relaxationszeiten der Spinpolarisierung die gleiche Bedingung. Die Bezeichnung
Relaxationszeit wird im folgenden klar werden. Fürs erste sei bemerkt, dass unsere Lösungsmethode für die z-Richtung, und wie wir später sehen werden auch für die x- und y-Richtung,
55
4.1. QUASIKLASSISCHE SPINRELAXATION
KAPITEL 4. SPINDYNAMIK
2,0
Re(
1,5
Im(
Re(
1,0
Im(
1
1
2
2
)
)
)
)
0,5
0,0
-0,5
-1,0
-1,5
-2,0
0,0
0,5
1,0
1,5
2,0
Rashba-Parameter a
Abbildung 4.2.: Real- und Imaginärteil der komplexen Lösungen von Gleichung (4.7) für die
z-Komponente der zeitabhängigen Spinpolarisierung mit τp = 1
die gleichen Ergebnisse liefert wie eine völlig andere Herangehensweise mittels Greenscher
Funktionen. Dies spricht für die Korrektheit unserer Methode. Wir lösen Gleichung (4.7) und
erhalten:
√
−i ± 4a2 − 1
ω1,2 =
(4.8)
2τp
Bei der Summe über die Residuen kann man die Exponentialfunktion aus dem Residuum herausziehen. Berücksichtigt man, dass die Exponentialfunktion die einzige Stelle ist, an der die
Zeit t vorkommt, erhält man damit eine gewichtete Summe über mehrere (in diesem Fall zwei)
Exponentialfunktionen unterschiedlicher, gegebenenfalls komplexer Frequenz:
U(t) = τp
Z∞
−1
dω −iωt
e F(ω) 1 − F(ω)
2π
−∞
U(t)33 = −iτp
2
X
i=1
2
Resωi
−iτp F(ω)
e−iωt F(ω) X −iωi t
=
e
Resωi
= A1 e−iω1 t + A2 e−iω2 t
1 − F(ω)
1
−
F(ω)
i=1
|
{z
}
(4.9)
=:Ai
A1,2
1
i
= ± √
2 2 4a2 − 1
Summen von Exponentialfunktionen dieser Art mit zwei oder mehr Summanden werden uns
im Folgenden noch öfter begegnen. Damit hat man mit den komplexen Frequenzen ω1 und ω2
das Problem vollständig gelöst. In Abbildung 4.2 sind diese für a ∈ [0, 2] und τp = 1 abgedruckt. Man sieht an der Abbildung und den dazugehörigen Gleichungen, dass für a ≥ 12 sowohl
iω1 = (iω2 )∗ als auch A1 = A∗2 gilt. Diese beiden Beziehungen stellen sicher, dass U(t)33 reell
ist und somit auch der Spin für alle Zeiten t reell bleibt. Für a ≤ 12 wird dies durch den verschwindenden Realteil in ω1 und ω2 erreicht. Ein Imaginärteil in der Spinpolarisierung würde
56
4.1. QUASIKLASSISCHE SPINRELAXATION
KAPITEL 4. SPINDYNAMIK
1,0
a=0,4
a=1
z
Spinpolarisierung <s (t)>
a=4
Simulation
0,5
0,0
-0,5
0
2
4
6
8
10
Zeit t
Abbildung 4.3.: Zeitabhängige Spinpolarisierung hsz (t)i für verschiedene Werte des Rashba-Parameters a
mit τp = 1
physikalisch keinen Sinn ergeben. Wir werden uns nun genauer mit den ωi beschäftigen. Die
Vorfaktoren Ai haben zwar ebenfalls Einfluss auf das Ergebnis, führen aber praktisch nur zu
einer Phasenverschiebung. Die komplexen Frequenzen ωi hingegen definieren die Oszillationsfrequenz der Spinpolarisierung und deren Relaxationszeit.
Man sieht sowohl in Abbildung 4.2 als auch in Gleichung (4.8), dass sich das Verhalten bei
a = 21 grundlegend ändert. Für a < 12 , also für einen schwächeren Rashba-Effekt, sind beide ωi
rein imaginär und negativ. Damit ist −iω reell und negativ. Für diesen Parameterbereich von a
oszilliert die Spinpolarisierung hs(t)i nicht, sondern nimmt exponentiell ab. Es handelt sich um
einen Kriechfall bezogen auf die Spinpolarisierung. Für a > 12 , also relativ starke Rashba-SpinBahn-Kopplung, erhält man eine gedämpfte Schwingung. Die Bezeichnungen „schwach“ oder
„stark“ beziehen sich hier nur auf die verschiedenen Fälle des Verlaufs und nicht auf Werte in
echten Materialien. Die Frequenz der Schwingung wird durch den Betrag des Realteils von ω1
und ω2 definiert. Wenig überraschend steigt diese für größer werdendes a an. Wir hatten a derart
~ R beschreibt. Somit ist es nur logisch, dass eine
definiert, dass es die Winkelgeschwindigkeit ω
größere Winkelgeschwindigkeit auch eine schnellere Oszillation der Spinpolarisierung bewirkt.
In Abbildung 4.3 sind die zeitlichen Verläufe der Spinpolarisierung in z-Richtung für verschiedene Werte des Rashba-Parameters eingezeichnet. Man sieht sehr gut das vorausgesagte
Verhalten: für kleines a stellt sich ein Kriechfall ein und die Spinpolarisierung nimmt monoton ab. Bei größeren Werten des Rashba-Parameters oszilliert die Spinpolarisierung hingegen,
bevor sie relaxiert. Die Ergebnisse der Monte-Carlo-Simulation wurden auch hier wieder mit
eingezeichnet und stimmen perfekt mit den analytisch berechneten Kurven überein. Im Fachpraktikum wurden die, durch die Analyse der Daten aus der Monte-Carlo-Simuation erhaltenen,
komplexen Frequenzen mit der von Raimondi u. a. in [Rai+06] berechneten Formel verglichen.
Die Werte stimmen auf zwei bis drei signifikante Stellen überein, und das, ohne dass hier allzu viel Rechenzeit aufgewendet wurde: die abgebildeten Kurven wurden mit 105 simulierten
Elektronen berechnet und lassen sich auf einen handelsüblichen Laptop in wenigen Sekunden
erstellen. Damit liefern alle drei verschiedenen Herangehensweisen, die analytischen Ergebnis-
57
4.1. QUASIKLASSISCHE SPINRELAXATION
KAPITEL 4. SPINDYNAMIK
Simulation
4
10
analytisch
1/a^2
=2
Relaxationszeit
z
3
10
2
10
1
10
0
10
0,01
0,1
1
10
Rashba-Parameter a
Abbildung 4.4.: Relaxationszeit τz der Spinpolarisierung in z-Richtung in Abhängigkeit vom RashbaParameter a mit τp = 1
se von Raimondi u. a., unsere analytischen Ergebnisse und die Resultate unserer numerischen
Simulation, das gleiche Ergebnis. Wir können also davon aus gehen, dass bis jetzt alle Überlegungen im Rahmen des Modells korrekt sind.
Mit den in Gleichung (4.8) berechneten komplexen Frequenzen können wir auch die Relaxationszeit des Systems bestimmen. Dafür gehen wir von der Annahme aus, dass für die Bestimmung der Relaxationszeit nur der Summand mit der größten Lebensdauer in der Zeitentwicklung 4.1.1 von Bedeutung ist. Man erhält für die Relaxationszeit:
τ=−
1
max Im(ωi )
(4.10)
i ∈ {1,2}
In unserem Fall entspricht das immer dem Imaginärteil von ω2 , wie in Abbildung 4.2 sehr gut
zu erkennen ist. Für Werte a > 21 und sehr kleine Werte von a lassen sich die Werte der Relaxationszeit einfach angeben. Im Fall a ≥ 12 ist die Wurzel in Gleichung (4.8) reell und man kann
die Relaxationszeit exakt angegeben:
1
für a ≥ : τ(a) = 2τp
2
(4.11)
Für den Fall schwacher Rashba-Spin-Bahn-Wechselwirkung hilft es, die Wurzel um a = 0 zu
entwickeln:
für a 1: τ(a) =
2τp
2τp
τp
≈
= 2
√
2
1 + i 4a2 − 1 1 + i(i − 2ia ) a
(4.12)
Um die Relaxationszeiten für die Monte-Carlo-Simulation zu bestimmen, wurde ein Fit an die
zeitabhängige Spinpolarisierung, wie sie in Abbildung 4.3 abgedruckt ist, verwendet. Dabei
wurde für a ≤ 12 die Summe zweier Exponentialfunktionen und für a ≥ 12 eine gedämpfte
Schwingung gefittet. In Abbildung 4.4 sind sowohl die analytischen Werte, als auch die gerade
58
4.1. QUASIKLASSISCHE SPINRELAXATION
KAPITEL 4. SPINDYNAMIK
entwickelten Näherungen, sowie die Werte aus der numerischen Simulation dargestellt. Die numerischen Werte passen, wie zu erwarten war, sehr gut zu den analytischen Werten. Da schon
die zeitabhängigen Spinpolarisierungen der Simulation und der analytischen Rechnung sehr gut
zusammen passten, wäre es erstaunlich gewesen, wenn die Relaxationszeiten andere Ergebnisse
geliefert hätten. Auch die Werte der Näherungslösung (4.12) passen für a . 0,2 sehr gut zur
exakten Lösung. Der relative Fehler beträgt für a = 0,2 ca. 4,17%, für a = 0,1 nur noch 1,01%.
Da wir die einfacher zu behandelnde z-Komponente nun ausführlich beschrieben haben, werden wir uns nun der x- und y-Komponente der Spinpolarisierung zuwenden. Das Vorgehen ist
dabei identisch, jedoch werden die sich ergebenden Formeln teilweise um ein Vielfaches länger
sein, weshalb hier nicht die ganze Lösung abgedruckt wird. Diese mit einem beliebigen Computeralgebrasystem zu berechnen stellt aber kein größeres Problem dar. Wir hatten bereits R(t)
berechnet und fahren nun mit der Zeitintegration fort:
F(ω) =
Z∞
dt1 p(t1 ) eiωt1 R(t1 )
0
2
i
1
1
F(ω)11 =
+
+
4 i + τp ω i − a + τp ω i + a + τp ω
i a2 − 2(i + τp ω)2
F(ω)11
=
1 − F(ω)11 a2 (i + 2τp ω) − 2τp ω(i + τp ω)2
!
(4.13)
(4.14)
Um die Polstellen für die Anwendung des Residuensatzes zu finden, muss wieder der Nenner
gleich Null gesetzt werden:
a2 (i + 2τp ω) − 2τp ω(i + τp ω)2 = 0
(4.15)
Auch diese Formel entspricht wieder den Resultaten von Raimondi u. a. in [Rai+06]. Der Unterschied zur Berechnung der z-Richtung ist nun, dass es sich hierbei um eine kubische Gleichung
handelt. Diese lässt sich zwar ebenfalls lösen, das Ergebnis ist aber nicht mehr so kompakt wie
das der quadratischen Gleichung (4.7). Man erhält drei Lösungen:
√3 √3
2 · 22/3 3a2 − 1 A−1/3 + 2 A + 4i
ω1 = −
(4.16)
6τp
√3 √ √ √3
−8i + 2 · 22/3 1 ± i 3 3a2 − 1 A−1/3 + 2 1 ∓ i 3 A
ω2,3 =
(4.17)
12τp
p
A = 4i + 9ia2 + 3a −48a4 + 39a2 − 24
In Abbildung 4.5 sind die komplexen Frequenzen ωi für einen kleinen Parameterbereich von a
eingezeichnet. Es fällt zuerst auf, dass es nun keinen kritischen Wert für a gibt, bei dem sich das
Verhalten grundlegend ändert. Zudem gilt weiterhin, dass zwei der Frequenzen bis auf das Vorzeichen ihres Realteils gleich sind: iω1 = (iω2 )∗ . Das endgültige Ergebnis, dass man durch die
59
4.1. QUASIKLASSISCHE SPINRELAXATION
KAPITEL 4. SPINDYNAMIK
2,0
Re(
1,5
Im(
Re(
1,0
Im(
0,5
Re(
Im(
0,0
1
1
2
2
)
)
3
3
)
)
)
)
-0,5
-1,0
-1,5
-2,0
0,0
0,5
1,0
1,5
2,0
Rashba-Parameter a
Abbildung 4.5.: Real- und Imaginärteil der komplexen Lösungen von Gleichung (4.15) für die x- bzw.
y-Komponente der zeitabhängigen Spinpolarisierung mit τp = 1
ω-Integration erhält, wird hier nicht abgedruckt, da es in etwa eine Seite füllen würde und die
genaue Formel für die weiteren Betrachtungen nicht essentiell ist. Wie schon zuvor lässt sich das
Ergebnis aber wieder als Summe gewichteter Exponentialfunktionen schreiben. Da iω1 = (iω2 )∗
nun für alle möglichen Werte des Rashba-Parameters a gilt, kann man zudem die zwei entsprechenden Terme zu einem Kosinus mit Phasenverschiebung zusammenfassen:
U(t)11 = A3 e−iω3 t + A1 eIm(ω1 )t cos Re(ω1 )t + ∆ω
(4.18)
Da ω3 rein imaginär ist, ist auch sichergestellt, das U(t)11 reell ist. Abbildung 4.6 zeigt die
Zeitabhängigkeit einer Spinpolarisierung in der xy-Ebene. Im Gegensatz zu den vorherigen Betrachtungen der Spinpolarisierung in z-Richtung, kehrt sich die Polarisierung hier nicht um.
Die Kosinusschwingung aus Gleichung (4.18) ist vollkommen ins Positive verschoben. Für die
z-Richtung hatte sich in Abbildung 4.3 je nach Stärke der Rashba-Spin-Orbit-Wechselwirkung
die Spinpolarisierungen zeitweise umgekehrt. Auch die Ergebnisse der Monte-Carlo-Simulation
unterstützen erneut die Korrektheit der Rechnung: sie sind nahezu deckungsgleich mit den analytischen Ergebnissen.
Bevor wir mit den grundlegenden Betrachtungen in diesem Abschnitt abschließen und uns im
nächsten Abschnitt der ortsaufgelösten Spinpolarisierung widmen, betrachten wir noch die Relaxationszeiten bezüglich der x- bzw. y-Richtung. Diese erhält man analog zu Gleichung (4.10),
nur dass hier theoretisch alle drei ωi betrachtet werden müssten. In Abbildung 4.5 erkennt man
jedoch auf den ersten Blick, dass der Imaginärteil von ω3 für alle Werte von a am größten ist.
Außerdem vermuten wir Aufgrund des Verlaufs von Im(ω3 ), dass sich auch einfache Aussagen über die Relaxationszeit für sehr großes bzw. sehr kleines a treffen lassen. Wir verwenden
Mathematica und entwickeln ω3 bis zur zweiten Ordnung in a:
ω3 = −
ia2
+ O(a6 )
2τp
⇒
60
für a 1: τ(a) ≈
2τp
a2
(4.19)
4.1. QUASIKLASSISCHE SPINRELAXATION
KAPITEL 4. SPINDYNAMIK
1,00
a=0,4
a=1
Simulation
Spinpolarisierung <s
x,y
(t)>
a=4
0,75
0,50
0,25
0,00
0
2
4
6
8
10
Zeit t
Abbildung 4.6.: Zeitabhängige Spinpolarisierung hsx,y (t)i für verschiedene Werte des RashbaParameters a mit τp = 1
Um eine Aussage für a 1 zu erhalten, entwickeln wir bis zur nullten Ordnung in a1 :
i
1
ω3 = −
+O 2
2τp
a
!
⇒
für a 1: τ(a) ≈ 2τp
(4.20)
Abbildung 4.7 zeigt wieder alle bisherigen Resultate: die analytisch exakte Berechnung, Näherungen für sehr große bzw. sehr kleine Werte des Rashba-Parameters, sowie die Resultate der
numerischen Simulation. Um die Relaxationszeiten der Monte-Carlo-Simulation zu erhalten,
wurde hier Gleichung (4.18) an den zeitlichen Verlauf der Spinpolarisierung gefittet. Auch in
diesem Fall gibt es keine Überraschungen und alle Ergebnisse stimmen perfekt überein.
Wir haben uns in diesem Abschnitt ausführlich mit der zeitabhängigen Spinpolarisierung
eines zweidimensionalen Elektronengases mit Rashba-Spin-Bahn-Wechselwirkung beschäftigt.
Die Überlegungen gelten analog auch für ein Elektronengas, das neben der Streuung an Störstellen ausschließlich die Dresselhaus-Spin-Bahn-Wechselwirkung spürt. Dabei haben wir gezeigt,
dass der in Abschnitt 2.3 entwickelte Lösungsweg für das beschriebene Modell auch wirklich
die richtigen Lösungen liefert. Hierzu haben wir die vollständig analytisch berechneten Resultate mit denen der numerischen Monte-Carlo-Simulation, wie sie in Abschnitt 2.4 beschrieben
wurde, verglichen und eine im Rahmen der numerischen Genauigkeit exakte Übereinstimmung
festgestellt. Außerdem wurden Teile des analytischen Ergebnisses mit den Resultaten von Raimondi u. a. verglichen und festgestellt, dass auch diese zu unseren Aussagen konform sind.
61
4.1. QUASIKLASSISCHE SPINRELAXATION
KAPITEL 4. SPINDYNAMIK
Simulation
analytisch
2/a^2
4
10
Relaxationszeit
x,y
=2
3
10
2
10
1
10
0
10
0,01
0,1
1
10
Rashba-Parameter a
Abbildung 4.7.: Relaxationszeit τx,y der Spinpolarisierungder in x- bzw. y-Richtung in Abhängigkeit vom
Rashba-Parameter a mit τp = 1
4.1.2. Eindimensionales System
Wir haben bereits die Ladungsdynamik zeit- und ortsabhängig untersucht. Im letzten Abschnitt
haben wir uns der Spindynamik zugewandt und diese zeitabhängig analysiert. Der nächste logische Schritt ist die orts- und zeitabhängige Untersuchung der Spindynamik, da es keinen Grund
gibt anzunehmen, dass die Spinpolarisierung ortsunabhängig ist. Der Lösungsansatz, der in Abschnitt 2.3.3 entwickelt wurde, und der in den Abschnitten 3.1.2 und 3.1.3 schon zum Einsatz
kam, wird uns auch hier wieder zu einer Lösung verhelfen. Weiterhin ist es ebenfalls wieder
hilfreich, das eindimensionale und das zweidimensionale Problem getrennt zu betrachten.
Wir beginnen mit dem eindimensionalen Elektronengas mit Rashba-Spin-Bahn-Wechselwirkung. Den Dresselhaus-Effekt werden wir aufgrund der schon in Abschnitt 4.1.1 angesproche
nen Schwierigkeiten - das Winkelmittel über die Rotationsmatrix R(~
ωges ~p t1 ) lässt sich nicht
berechnen - wieder außen vor lassen. Damit erhalten wir die benötigte betragsmäßig konstante
~ ges ~p indem wir b1 = 0 und b3 = 0 setzen. Wir betrachten zuerst kurz
Winkelgeschwindigkeit ω
die Form der Rotationsmatrix R(~
ωges ~p t1 ) für ~p k ~ex :
at1
cos τp
0 −sgn(p x ) sin atτp1
mit ~p = p0x
R(~
ωges ~p t1 ) =
(4.21)
0
1
0
0
sgn(p x ) sin at1 0
cos atτp1
τp
Es sind zwei Dinge zu beobachten: erstens ist die y-Komponente von der Rotation und damit
der Spin-Bahn-Wechselwirkung nicht beeinflusst und hat auch keinen Einfluss auf die anderen
beiden Raumrichtungen. Damit verhält sich die y-Richtung des Spins wie eine Ladung gemäß
Gleichung (3.17) auf Seite 35. Dies ist anschaulich durchaus logisch: bei der Bewegung in x
~ ges ~p ∼ ~p × ~ez in y-Richtung und beeinflusst damit nur
Richtung zeigt die Rotationsachse ω
die x- und z-Richtung des Spins. Zum anderen ist die Matrix antisymmetrisch. Dies äußert sich
später in exakt gleichem Verhalten von x- und z-Richtung. Der nächste Schritt ist wie gehabt die
62
4.1. QUASIKLASSISCHE SPINRELAXATION
KAPITEL 4. SPINDYNAMIK
Berechnung von F k, ω und liefert:
1
F k, ω =
2
Z∞
0
F11 = F33
F11 0 F13
X
i
~ ges ~p t1 e m t1 kpx = 0 . . . 0
dt1 p(t1 ) eiωt1
R ω
px =±pF
F31 0 F33
(4.22)
i
1
1
1
1
=
+
+
+
4 i − a − vF τp k + τp ω i + a − vF τp k + τp ω i − a + vF τp k + τp ω i + a + vF τp k + τp ω
F13 = −F31
!
2avF τp k i + τp ω
= −
i − a − vF τp k + τp ω i + a − vF τp k + τp ω i + a + vF τp k + τp ω i − a + vF τp k + τp ω
Daraus müssen wir F k, ω (1 − F k, ω )−1 berechnen. Von Hand wäre dies mühsam doch Mathematica ist hier eine große Hilfe und liefert das Ergebnis ohne große Anstrengungen:
F k, ω 1 − F k, ω −1
B
A
= 0
C
−A
0
...
0
C
A
0
B
(4.23)
A
2
A = a4 + τ2p v2F τp k2 − ω(i + τp ω) − 2a2 τp v2F τp k2 + ω(i + τp ω)
B = (1 − iτp ω) a2 + τp v2F τp k2 − ω(i + τp ω)
C = 2avF τp k(i + τp ω)
Daraus kann man durch Null setzen von A die Polstellen bezüglich ω berechnen und somit
die ω-Integration mit dem Residuensatz durchführen. Wir werden uns nun in erster Linie auf
die Diagonalelemente konzentrieren. Diese beschreiben, wie sich eine Spinpolarisierung in xoder z-Richtung bezüglich dieser Richtung verhält. Damit berücksichtigen wir vorerst keine
Änderung der Richtung der Spinpolarisierung - darauf werden wir später kurz zurückkommen.
Man erhält für die Diagonalkomponenten:
U x, t
11
Z∞
dk −ikx
e
2π
Z∞
dω −iωt e
F k, ω 1 − F k, ω −1 =
11
2π
−∞
−∞
tA+
!
! sin tA−
Z∞
− 2τt p
sin
−ikx
2τp
2τp
tA−
tA+
dk e e
cos
+
+
cos
+
= τp
2π 2τp
2τ
2τ
A
A
p
p
−
+
−∞
q
A± =
−1 + 2a ± 2vF τp k 1 + 2a ± 2kvF τp k
= τp
(4.24)
In dieser Gleichung kommt k wieder an verschiedenen Stellen vor, unter anderem unter den
Wurzeln in A± in den Argumenten von Kosinus und Sinus. Damit ist man hier mit der analytisch
exakten Rechnung am Ende. Leider stellt sich heraus, dass in diesem Fall auch Näherungslösungen, wie wir sie in den Abschnitten 3.1.2 und 3.1.3 auf Seiten 34 und 38 noch verwendet
63
4.1. QUASIKLASSISCHE SPINRELAXATION
KAPITEL 4. SPINDYNAMIK
0,6
t=5
t=10
0,5
0,4
0,3
0,2
0,1
0,0
-0,1
-10
-5
0
5
10
Integrationsvariable k
Abbildung 4.8.: Amplitude des Integranden der k-Integration Gleichung (4.24) für vF = 1, τp = 1, a = 1
und zwei verschiedene Zeitpunkte t = 5 und t = 10
hatten, keine zufriedenstellenden Ergebnisse liefern. Es ist zwar möglich die Rechnung durch
Streichen höherer Potenzen in Gleichung (4.23) bis zum Ende analytisch durchzuführen, das Ergebnis nähert aber das in der Simulation und der numerischen Integration beobachtete Verhalten
nicht. Uns bleiben also die erwähnten zwei Möglichkeiten: numerische Integration über k und
Monte-Carlo-Simulation. Abbildung 4.8 zeigt den Integranden der k-Integration. Es zeigt sich
ein ähnliches Bild wie bei der numerischen Integration der Ladungsverteilung, mit dem Unterschied, dass es hier zwei Peaks in der Nähe von k = 0 gibt. Fürs Erste stellen wir fest, dass,
insbesondere für größere Zeiten, die beiden Peaks immer schärfer werden, während die Oszillationen neben den Peaks immer unbedeutender werden. Wir können das uneigentliche Integral
über k also numerisch wieder berechnen, indem wir über einen begrenzten Bereich um die Peaks
herum summieren. Auf diese Weise kann man numerisch die zeit- und ortsabhängige Spinpolarisierung berechnen. Die genaue Position der Peaks lässt sich berechnen, wenn man sich bewusst
macht, wie sich eine Kosinus oder Sinus mit imaginärem Argument verhält. Dabei gilt:
sin(ix) = i sinh(x)
und
cos(ix) = cosh(x)
(4.25)
Somit werden die Beiträge der einzelnen Summanden in Gleichung (4.24) am größten, wenn
die Argumente des Kosinus bzw. Sinus imaginär und möglichst groß sind. Wir suchen also das
(negative) Minimum der Radikanden in A± . Eine einfache Minimumsuche durch Ableiten und
anschließendes Null setzen liefert:
k1,2 = ∓
a
vF τp
(4.26)
Eine Sichtprüfung mit einigen verschiedenen Parametern bestätigt das Ergebnis. Wir werden
diese Peaks verwenden um zumindest den Teil einer Näherungslösung zu konstruieren. Vernachlässigt man die Amplitude, dann nähern sich die Peaks für große Zeiten einer Deltafunktion
64
4.1. QUASIKLASSISCHE SPINRELAXATION
KAPITEL 4. SPINDYNAMIK
an. Für große Zeiten gilt:
Z∞
U x, t
!
!!
a
a
+δ k+
=
∼
dk e
δ k−
v F τp
v F τp
−∞
!
iax
ax
− viaxτp
vF τp
F
=e
+e
= 2 cos
v F τp
−ikx
11
(4.27)
Wir haben also berechnet, dass die Spindichte zu jeder Zeit konstant ist und mit einem Kosinus
im Ort variiert. Um dies zu verstehen, muss man sich verdeutlichen, wie sich der Spin eines
Elektrons verhält, wenn sich das Elektron auf einer Linie bewegt. Bei der Bewegung in zum
Beispiel positiver Richtung dreht sich der Spin um eine konstante Achse. Wird das Elektron
dann gestreut und bewegt sich in entgegengesetzter Richtung, dann dreht sich der Spin mit gleicher Geschwindigkeit in exakt entgegengesetzter Richtung. Die vorherige Drehung wird also
Rückgängig gemacht und die Ausrichtung des Spins hängt nur noch vom Abstand zum Ausgangspunkt ab. Genau dieses Verhalten beschreibt die soeben erhaltene Näherung (4.27). Wir
haben also die Spinpolarisierung und nicht die Spindichte erhalten. Gewichtet man dieses Ergebnis mit der genäherten Ladungsdichte aus Gleichung (3.20) auf Seite 36, erhält man eine
brauchbare Näherung für die Spindichte. Das gleiche Vorgehen liefert auch Resultate für die
restlichen Komponenten der Zeitentwicklung. Man berechnet auch die restlichen Komponenten
und erhält:
ax
cos ax
0
−
sin
vF τp
vF τp
(4.28)
U x, t ≈ Uρ x, t
0
1
0
ax
ax
sin
0 cos
v F τp
Uρ x, t ≈
v F τp
−x2
4v2 τp t
F
e
√
2vF πτp t
(4.29)
In Abbildung 4.9 sind die Ergebnisse der drei Methoden dargestellt. Dabei ergeben sich keine Überraschungen: alle Ergebnisse passen im Rahmen der jeweiligen Genauigkeit zusammen.
Die Näherung kann dabei, wie schon bei der Ladungsverteilung, die Peaks der ungestreuten
Elektronen nicht darstellen und sagt auch hier eine Spindichte für |x| > vF t voraus. Die numerische Integration sowie die Monte-Carlo-Simulation zeigen Peaks hingegen sehr deutlich. Bei
der numerischen Integration ergeben sich kleinere Oszillationen in der Nähe der Peaks. Die Simulation zeigt diese Ungenauigkeiten nicht, leidet jedoch unter leichtem statistischen Rauschen.
Dabei wurden für die Monte-Carlo-Simulation mit N = 105 relativ wenig Elektronen verwendet
um das statistische Rauschen noch erkennbar zu halten. Es stellt für die Simulation kein Problem
dar auf einem handelsüblichen Laptop diese Berechnung auch für 107 Elektronen in einigen Sekunden durchzuführen. Die Methode der numerischen Integration ist hier mit einer Rechenzeit
von mehreren Minuten für die dargestellten Bilder deutlich weniger effektiv.
65
4.1. QUASIKLASSISCHE SPINRELAXATION
0,4
KAPITEL 4. SPINDYNAMIK
0,08
t=5
t=20
Simulation
Simulation
0,06
analytisch
0,3
(x,t)>
analytisch
Näherung
0,04
x,z
Spindichte <s
Spindichte <s
x,z
(x,t)>
Näherung
0,2
0,1
0,0
0,02
0,00
-0,02
-0,04
-0,06
-0,1
-10
-5
0
5
10
Ort x
-20
-15
-10
-5
0
5
10
15
20
Ort x
Abbildung 4.9.: Eindimensionale zeit- und ortsabhängige Spindichte sx,z x, t für vF = 1, τp = 1, a = 1
und zwei verschiedene Zeitpunkte t = 5 (links) und t = 10 (rechts)
4.1.3. Zweidimensionales System
Der nächste Schritt wird sein, die Rechnungen auch auf das zweidimensionale Elektronengas
mit Spin-Bahn-Wechselwirkung anzuwenden. Schon bei der eindimensionalen zeit- und ortsabhängigen Betrachtung im letzten Abschnitt hatten wir gesehen, dass die analytische Lösung
an ihre Grenzen stößt und nicht bis zu einem geschlossenen Ausdruck für die Zeitentwicklung
durchgezogen werden kann. Wir werden nun versuchen das Problem so weit wie möglich analytisch zu bearbeiten. Die sich ergebenden Schwierigkeiten werden uns dann dazu bewegen, eine
nicht zeitaufgelöste Analyse des Problems vorzunehmen, d.h. zeitgemittelte, aber ortsaufgelöste
Spinpolarisierungen zu betrachten.
Schon im eindimensionalen Fall hatten wir nur den Rashba-Effekt miteinbezogen. Es ist nicht
zu erwarten, dass die Berechnungen mit Rashba- und Dresselhaus-Effekt im zweidimensionalen Fall einfacher werden. Wir bleiben also vorerst bei der Vereinfachung b1 = 0 und b3 = 0.
Wie schon bei der zweidimensionalen Ladungsverteilung verwenden wir Polarkoordinaten, um
das Problem etwas zu vereinfachen. Damit verlaufen die Rechnungen analog zu denen aus Abschnitt 3.1.3 mit den Gleichungen (3.22) und (3.23) als Ausgangspunkte. Wir führen zuerst das
66
4.1. QUASIKLASSISCHE SPINRELAXATION
KAPITEL 4. SPINDYNAMIK
Winkelmittel über φ aus:
R(t1 , k, ψ) =
Z2π
dφ ivF t1 k cos(φ−ψ) ~ ges
e
R ω
2π
0
R11 R12 R13
~p t1 = R21 R22 R23
R31 R32 R33
mit ~p = pF
cos φ ! 2J1 vF t1 k cos(2ψ) sin2
at1
+ sin2 (ψ) +
= J0 vF t1 k cos(ψ) cos
τp
vF t1 k
!
at1
R12 = R21 = J2 vF t1 k sin(2ψ) sin2
2τp
!
at1
R13 = −R31 = −iJ1 vF t1 k cos(ψ) sin
τp
!
at1
R23 = −R32 = −iJ1 vF t1 k sin(ψ) sin
τp
!
at1
R33 = J0 vF t1 k cos
τp
!
R11 = R22
sin φ
0
at1
2τp
(4.30)
Der Kosinus in der Exponentialfunktion im Integranden bewirkt, dass man hier die verschiedenen Besselfunktionen erster Gattung Ji erhält. Es folgt die Zeitintegration mit der Gewichtung
der Exponentialverteilung. Obwohl das erste Zwischenergebnis R(t1 , k, ψ) schon recht kompliziert aussieht, kann man die Zeitintegration noch exakt durchführen, da der Integrand sich nur
aus Exponential-, Bessel-, Kosinus- und Sinusfunktionen zusammen setzt.
F k, ψ, ω =
Z∞
dt1 p(t1 ) eiωt1 R(t1 , k, ψ)
(4.31)
0
Wir verzichten hier auf die vollständige Angabe des Resultats, da die genaue Formel sehr lang
ist und wir dafür in etwa eine halbe Seite Platz bräuchten. Außerdem ist die genaue Form für die
weiteren Betrachtungen nicht von großer Bedeutung. Wenn wir die Schritte unseres analytischen
Lösungsweges weiter abarbeiten, müssen wir als nächstes F k, ψ, ω (1−F k, ψ, ω )−1 berechnen.
Da man eine Matrix mit beliebigen Elementen mit Hilfe der Determinanten ihrer Untermatrizen
berechnen kann, ist auch dieser Schritt in jedem Fall durchführbar. Man erhält dabei jedoch
Formeln absurder Länge. Möchte man nun den Residuensatz auf diese Formeln anwenden und
versucht, mit dem Hintergedanken die Polstellen zu finden, einen Hauptnenner zu bilden, erhält
man beispielsweise für die (3,3)-Komponente Potenzen in ω bis mindestens ω7 für den Nenner
und bis mindestens ω6 für den Zähler. Die erhaltenen Formeln für eine Komponente würden hier
in etwa zwei bis drei Seiten füllen. Der Versuch die nun folgende k- und ω-Integration
U r, θ, t = τp
Z∞
−∞
dω −iωt
e
2π
Z∞
−1
dk
kJ0 kr F k, ψ, ω 1 − F k, ψ, ω
2π
(4.32)
0
auszuführen, entweder mit dem Residuensatz oder auf andere Weise, kann somit als aussichtslos
bezeichnet werden. Selbst wenn die Integrationen gelingen sollten, ist es unwahrscheinlich, dass
danach ein Ergebnis zustande kommt, das genügend kompakt ist, um es interpretieren zu können.
67
4.1. QUASIKLASSISCHE SPINRELAXATION
KAPITEL 4. SPINDYNAMIK
Abbildung 4.10.: Integrand (links) und dessen Amplitude (rechts) der k- und ω-Integration in Gleichung (4.32) für r = 2, t = 5, vF = 1, τp = 1 und a = 1
Trotzdem sind die so erhaltenen Ergebnisse nicht gänzlich nutzlos. Man kann mit Mathematica zeigen, dass die Diagonalelemente unabhängig von ψ sind. Diese Unabhängigkeit hat konkrete Auswirkungen: betrachtet man ein System, dessen Elektronen sich zum Zeitpunkt t = 0 alle
am Ursprung befinden und deren Spin in Richtung einer der Achsen polarisiert ist, dann ist die
ortsabhängige Spinpolarisierung in dieser Richtung zu jeder Zeit unabhängig von ψ und damit
rotationssymmetrisch bezüglich des Ursprungs.
Auch wenn wir im Gegensatz zu den bisherigen Berechnungen die ω-Integration nicht analytisch lösen konnten, bleibt trotzdem die numerische Integration. Der einzige Unterschied besteht
darin, dass wir nun über zwei Variablen integrieren müssen - ω und k. Damit steigt zwar der Rechenaufwand und die Genauigkeit sinkt, das Prinzip bleibt aber das gleiche. Wir summieren bei
festgelegtem t und r über einen genügend großen Bereich um ω = 0 und k = 0 für k ≥ 0. Der
Integrand aus Gleichung (4.32) ist in Abbildung 4.10 (links) in Abhängigkeit der Integrationsvariablen abgedruckt. Wir integrieren also, indem wir über Werte in diesem Bild summieren.
In Abbildung 4.11 (links) ist das Resultat der numerischen Integration mit den Daten der
Monte-Carlo-Simulation verglichen. Man sieht sofort, dass der Graph der numerischen Integration starke Ungenauigkeiten aufweist. Zwar kann auch der Simulation nicht immer bedingungslos vertraut werden, in diesem Fall sieht man aber schon an der glatteren Form der Simulationsergebnisse, dass diese dem realen Verhalten des Modells sehr viel besser entsprechen als die
Ergebnisse der numerischen Integration. Nichtsdestotrotz beschreiben auch diese die Spinpolarisierung im Rahmen der Ungenauigkeiten. Für die zeit- und ortsabhängige Spinpolarisierung
zeigt die Monte-Carlo-Simulation ihre Berechtigung. Sie liefert in wenigen Sekunden sehr genaue Ergebnisse, wobei die numerische Integration für die abgedruckten Ergebnisse ca. eine
halbe Stunde braucht, und das, obwohl hier nur sehr wenig Punkte in r-Richtung berechnet
wurden. Im rechten Diagramm in Abbildung 4.11 sind die simulierten Spinpolarisierungen für
verschiedene Zeiten aufgetragen. Es dominieren drei Effekte den zeit- und örtlichen Verlauf:
zum einen erkennt man bei den Graphen für t = 1 und t = 2 sehr gut den sich nach außen bewegenden Peak. Im Gegensatz zum Peak bei der Ladungsverteilung oszilliert dieser Peak aber nun
während seiner Bewegung nach außen. Der zweite Teil, der die Spinpolarisierung bestimmt, ist
68
4.1. QUASIKLASSISCHE SPINRELAXATION
0,04
KAPITEL 4. SPINDYNAMIK
0,2
Simulation
t=1
analytisch
t=2
t=5
t=20
z
Spindichte <s (r,t)>
t=10
z
Spindichte <s (r,t)>
0,03
0,02
0,01
0,1
0,0
0,00
-0,01
0
1
2
3
4
5
6
0
1
2
3
4
5
6
Radius r
Radius r
Abbildung 4.11.: Zweidimensionale zeit- und ortsabhängige Spindichte sz r, t für vF = 1, τp = 1,
a = 1. Vergleich Simulation und analytische Rechnung für t = 5 (oben links) und
Vergleich verschiedener Zeitpunkte (oben rechts). Zweidimensionale Darstellung für
t = 2 (unten links) und t = 5 (unten rechts)
69
4.1. QUASIKLASSISCHE SPINRELAXATION
KAPITEL 4. SPINDYNAMIK
1,0
a=10
a=1
0,4
r=2
r=2
r=5
r=5
0,5
0,2
0,0
0,0
-0,2
-0,5
-0,4
-1,0
0
5
10
15
20
25
30
Integrationsvariable k
0
10
20
30
40
50
Integrationsvariable k
Abbildung 4.12.: Integrand der k-Integration in Gleichung (4.33) für t = 5, vF = 1, τp = 1 und zwei
verschiedene Orte r und Rashba-Parameter a
das Kontinuum, das der Peak während seiner Bewegung hinterlässt. Dieses Kontinuum ist nun
ebenfalls durch eine Modulation bezüglich r charakterisiert. Und zum Dritten relaxiert die Spinpolarisierung im gesamten Bereich mit der Zeit. Betrachtet man die Verläufe dieser Graphen, ist
es keine Überraschung mehr, dass die Integrale nicht gelöst werden konnten, denn diese Graphen lassen sich mit den üblichen Funktionen kaum beschreiben.
Wir haben es in diesem Abschnitt bisher nicht geschafft durch analytische Rechnung zufriedenstellende zeit- und ortsaufgelöste Ergebnisse zu erhalten. In Abschnitt 4.1.1 war es hingegen
kein Problem, für das selbe Modell die nur zeitabhängige Spinpolarisierung zu berechnen. Um
doch noch analytische Resultate für die Ortsabhängigkeit zu erhalten, werden wir uns nun auf
zeitintegrierte Spinpolarisierungen konzentrieren. Wir gehen dabei ähnlich vor wie bei den bisherigen Rechnungen, lassen jedoch die Deltafunktion für die Zeit δ(t1 + t2 + . . . − t) und folglich
auch die ω-Integration weg. Damit gilt unser Resultat nicht mehr für einen bestimmten Zeitpunkt, sondern stellt die zeitintegrierte Spindichte dar. D.h. wir erhalten das gleiche Ergebnis,
wie wenn wir die zeit- und ortsabhängige Spindichte berechnen und dann über alle Zeiten integrieren würden:
U(r) =
Z∞
dtU r, t =
Z∞
0
−1
dk
kJ0 kr F(0, k, ψ) 1 − F(0, k, ψ)
2π
(4.33)
0
Diese Sichtweise stellt die Vorgehensweise in der Monte-Carlo-Simulation dar: wir summieren
die zeit- und ortsabhängige Spindichte s r, t in kleinen Zeitschritten auf und teilen durch die
Länge des Zeitschritts. Für die analytische Berechnung können wir die bisherigen Ergebnisse
in Form von F k, ψ, ω (1 − F k, ψ, ω )−1 weiterverwenden. Das Weglassen der Deltafunktion
der Zeit wird durch einfaches ω = 0 setzen realisiert. Die Hoffnung ist, dass sich dadurch das
Zwischenergebnis derart vereinfacht, dass wir die k-Integration analytisch ausführen können.
Diese Hoffnung wird leider recht schnell enttäuscht. Obwohl sich das Zwischenergebnis etwas
vereinfacht, hat man es mit Potenzen von mindestens k6 zu tun. Eine rein analytische Lösung zu
70
4.1. QUASIKLASSISCHE SPINRELAXATION
KAPITEL 4. SPINDYNAMIK
0,6
1,0
a=10
Simulation
integrierte Spinpolarisierung <s (r)>
analytisch
0,8
z
z
integrierte Spinpolarisierung <s (r)>
a=1
0,6
0,4
0,2
0,0
-0,2
Simulation
analytisch
0,4
0,2
0,0
-0,2
-0,4
-0,6
0
2
4
6
8
10
Radius r
0,0
0,5
1,0
1,5
2,0
2,5
3,0
Radius r
Abbildung 4.13.: Zweidimensionale zeitintegrierte Spindichte sz r, t für vF = 1, τp = 1 und zwei
verschiedene Rashba-Parameter a
71
4.2. INHOMOGENE INITIALE SPINPOLARISIERUNG
KAPITEL 4. SPINDYNAMIK
finden scheint somit nicht möglich. Wir haben nun aber ein Integral weniger zu lösen und können das verbleibende nun wieder numerisch lösen. Im Gegensatz zur numerischen Lösung des
Doppelintegrals über k und ω lässt sich dieses einfache Integral über k mit akzeptabler Genauigkeit und Rechenzeit berechnen. Der Integrand ist in Abbildung 4.12 für verschiedene Werte von
r und a abgebildet. Entscheidend ist wieder, dass sich signifikant große Werte auf einen gewissen Bereich beschränken und für große Werte von k abnehmen. Die numerische Integration über
einen genügend großen Bereich liefert die gesuchte ortsabhängige Spindichte. Die entsprechenden Ergebnisse sind in Abbildung 4.13 zu finden. Für die numerische Simulation wurde erneut
eine relativ kleine Elektronenzahl verwendet, um das statistische Rauschen sichtbar zu machen.
Man sieht, dass die Resultate der beiden Berechnungsmethoden auch hier übereinstimmen.
Wir haben uns nun ausführlich mit der Spindynamik in unserem Modell beschäftigt. Dabei
war es in manchen Fällen möglich analytische Lösungen oder Teillösungen zu berechnen. In
anderen Fällen konnten wir zu keinem endgültigen Ergebnis kommen und mussten auf Näherungslösungen und numerische Berechnungen zurückgreifen. Alle unsere Ergebnisse wurden
mit den Resultaten der Monte-Carlo-Simulation verglichen und wir haben in jedem Fall eine genaue Übereinstimmung festgestellt. Kleinere Abweichungen, die zu beobachten waren, waren
auf Ungenauigkeiten bei den numerischen und zufallsbasierten Rechnungen zurückzuführen.
Wir haben dabei verschiedene Lösungsmethoden untereinander verglichen, wobei alle Ergebnisse konsistent waren. Wir können also in einer ersten Annahme davon ausgehen, dass unser
Lösungsweg im Rahmen des Modells auch im Bezug auf die Spindynamik korrekt ist.
4.2. Inhomogene initiale Spinpolarisierung
Wir haben uns im letzten Abschnitt ausführlich mit der zeit- und ortsabhängige Spinpolarisierung beschäftigt und herausgefunden, dass eine deltaförmige Spinverteilung zum Zeitpunkt t = 0
bei ~r = 0 für die z-Richtung in einer rotationssymmetrischen Spinverteilung für t > 0 resultiert.
Yuriy Pershin und Valeriy Slipko beschreiben in [PS10] ein verwandtes Phänomen: sie gehen
von dem gleichen Modell aus, das auch wir verwenden, nehmen jedoch zum Zeitpunkt t = 0
eine inhomogene, also ortsabhängige Spinpolarisierung an. Im Gegensatz zu unserem Modell
befinden sich also zu diesem Zeitpunkt nicht alle Elektronen am gleichen Punkt sondern sind
im Raum verteilt. Sie beobachten, dass die Relaxationszeit des Systems mit der Ortsabhängigkeit der initialen Spinpolarisierung zusammen hängt. Wenn man die Elektronen mit einer der
folgenden Spinpolarisierungen initialisiert
~s(r, 0) = ~ez cos k|~r| − ~er sin k|~r|
(4.34a)
~s(r, 0) = ~ez cos kry − ~ey sin kry
(4.34b)
dann relaxiert die Spinpolarisierung in der Umgebung des Ursprungs langsamer als wenn man
eine homogene Spinpolarisierung zum Zeitpunkt t = 0 annimmt. Dies ist in Übereinstimmung
mit unserem Ergebnis aus dem letzten Abschnitt, wobei k genau der Wellenzahl der Graphen
in Abbildung 4.13 entspricht. Verteilt man die Elektronen gemäß dieser Spinpolarisierung und
bewegen sie sich gemäß unseren Voraussagen, dann ergibt sich eine konstruktive Interferenz der
Elektronen in der Umgebung des Ursprungs. D.h. jedes Elektron, das im Verlauf der Simulation
72
4.2. INHOMOGENE INITIALE SPINPOLARISIERUNG
KAPITEL 4. SPINDYNAMIK
1
radiale Verteilung
2
radiale Verteilung
10
ebene Verteilung
a=
homogene Verteilung
Spinpolarisierung <s (0,t)>
a=
p
p
=0,1
=1
a=
Relaxationszeit
z
z
ebene Verteilung
0,1
1
10
a=
p
p
=0,1
=1
0
10
0
10
20
30
40
50
60
70
80
90
100
-1,0
-0,5
0,0
0,5
1,0
1,5
2,0
W ellenzahl k der initialen Spinverteilung
Zeit t
Abbildung 4.14.: Verlauf der Spinpolarisierung hsz (0, t)i in z-Richtung in der Nähe des Ursprungs für
k = 1, a = 0,1 und τp = 0,1 (links) und dessen Relaxationszeit τz in Abhängigkeit der
Wellenzahl der initialen Spinverteilung (rechts) für verschiedene initiale Spinverteilungen
den Punkt ~r = 0 erreicht, hat abgesehen von möglichen Streuungen den gleichen Spin, nämlich
genau ~s = ~ez . Die Spinpolarisierung in diesem Bereich relaxiert damit langsamer, als für eine
homogene Spinpolarisierung, bei der sich eine destruktive Interferenz einstellen würde.
Wir werden dieses Phänomen nun mit Hilfe der numerischen Simulation beschreiben. Die
Implementierung dieser Vorgänge in der Simulation stellt keine Schwierigkeit dar. Wir wählen
lediglich bei der Initialisierung für jedes Elektron einen zufälligen Ort innerhalb eines genügend
großen Bereichs und berechnen den Spin des Elektrons gemäß Gleichung (4.34a) oder (4.34b).
Die Spinpolarisierung bei ~r = 0 berechnen wir über den Mittelwert in einem kleinen Bereich
um den Ursprung. Die Erweiterung der Monte-Carlo-Simulation, um dieses Problem zu bearbeiten gestaltet sich also recht einfach. Eigentlich würde man numerische Ergebnisse gerne durch
analytische Rechnungen untermauern. Die zeitabhängige Spinpolarisierung an einem beliebigen
Ort ~r kann man mit der ortsabhängigen Spinpolarisierung mit initialer Deltaverteilung folgendermaßen angeben:
~s ~r, t =
Z∞
d2 r0 U(~r − ~r0 , t) ~s(r0 , 0)
(4.35)
−∞
Da es uns aber leider in Abschnitt 4.1.3 nicht möglich war, den zeit- und ortsabhängigen Zeit
entwicklungsoperator für den Spin U ~r, t analytisch anzugeben, kommen wir hier nicht weiter
und werden uns in diesem Fall auf die Monte-Carlo-Simulation verlassen.
In Abbildung 4.14 auf der linken Seite ist der zeitliche Verlauf der Spinpolarisierung in einer
kleinen Umgebung von ~r = 0 für drei verschiedene initiale Spinverteilungen angegeben. Man
sieht sehr deutlich, dass eine homogene Spinpolarisierung sehr viel schneller relaxiert als eine ebene Verteilung oder eine radiale Verteilung. Die radiale Verteilung bezeichnet dabei eine
radiale Welle um den Ursprung gemäß Gleichung (4.34a), die ebene Verteilung bezeichnet analog eine ebene Welle gemäß Gleichung (4.34b). Die Relaxationszeiten der ebenen und radialen
73
4.2. INHOMOGENE INITIALE SPINPOLARISIERUNG
KAPITEL 4. SPINDYNAMIK
radiale Verteilung
kmax
ebene Verteilung
kmax
Deltaverteilung
kδ
a = τp = 0,1
0,816
1,021
0,878
a = τp = 1
0,936
1,107
0,997
Tabelle 4.1.: Vergleich der Werte von kmax mit den Wellenzahlen, die aus einer deltaförmigen Spinverteilung resultieren kδ
Spinpolarisierung scheinen nach erster Schätzung ähnlich zu sein. Allerdings fängt die radiale
Spinpolarisierung später an zu relaxieren und liegt somit immer über der ebenen Spinpolarisierung. Die Ergebnisse von Pershin und Slipko zeigen genau das gleiche Verhalten und sind in
Abbildung 6 ihres Papers zu finden.
Um genauer zu bestimmen, wie die Relaxationszeit mit der Wellenzahl k der Spinpolarisierung zusammen hängt, wurde im rechten Diagramm in Abbildung 4.14 die Relaxationszeit für
die verschiedenen Spinverteilungen in Abhängigkeit von k eingezeichnet. Beim ersten Hinsehen
fällt sofort auf, was wir auch schon im linken Bild beobachtet haben: für k ≈ 1 bleibt die Spinpolarisierung signifikant länger erhalten als für eine homogene Spinpolarisierung mit k = 0. Die
Relaxationszeit steigt in allen vier betrachteten Fällen in etwa um den Faktor 4 bis 8. Dies deckt
sich grob mit den Beobachtungen von Pershin und Slipko. In den zu Abbildung 6 angegebenen Fits steigt die Relaxationszeit um einen Faktor von ca. 4,2. Außerdem bestätigt die Grafik
unsere Vermutung von oben: die Relaxationszeiten der beiden inhomogenen Spinverteilungen
sind in allen Bereichen der Wellenzahl k ähnlich. Dabei ergeben sich einige Unterschiede: zum
ersten ist die Wellenzahl kmax , die die längste Relaxationszeit bewirkt, für die ebene Verteilung
etwas größer. Zum Anderen ist die maximale Relaxationszeit für die radiale Verteilung minimal
größer als die der ebenen Verteilung. Wir ermitteln die verschiedenen kmax durch Fitten einer
geeigneten Funktion an die Resonanzkurve und vergleichen die Werte mit den Wellenzahlen
der ortsabhängigen Spinpolarisierung, wenn sich alle Elektronen zu Beginn der Simulation im
Ursprung befinden. Diese ermitteln wir ebenfalls durch einen Fit an Kurven, wie sie in Abbildung 4.13 gezeigt sind. Die Ergebnisse sind in Tabelle 4.1 aufgelistet. Pershin und Slipko geben
die „optimale“ Wellenzahl mit kmax = 0,97a/(vF τp ) an. Das passt recht gut zu unseren Werten.
Der genaue Zahlenwert konnte zwar nicht erreicht werden, unsere Ergebnisse befinden sich aber
im richtigen Bereich. Eine mögliche Fehlerquelle könnte hier die Größe des Bereichs um den
Ursprung gewesen sein, die für die Berechnung der Spinpolarisierung ~s(0, t) benutzt wurde.
Wird diese zu klein gewählt, dann wird über sehr wenige Elektronen gemittelt und man erhält
starkes statistisches Rauschen. Wählt man den Bereich hingegen zu groß, dann berücksichtigt
man zu viele Elektronen in einiger Entfernung vom Ursprung und verschlechtert damit erneut
das Ergebnis. Ein weiteres Problem könnte die endliche Größe des Bereichs, in dem die Elektronen zu Beginn der Simulation platziert wurden, gewesen sein. Wählt man diesen zu klein,
misst man Randeffekte, die sich bis zum Ursprung hin ausbreiten. Ein zu großes Gebiet bewirkt,
dass die Elektronen zu weit verteilt sind, womit sich wieder weniger Elektronen in der Nähe
des Ursprungs befinden, was sich wieder negativ auf das Ergebnis auswirkt. Nicht zuletzt spielt
auch die Methode, die verwendet wurde, um aus dem zeitlichen Verlauf der Spinpolarisierung
74
4.3. DRESSELHAUS SPIN-BAHN-KOPPLUNG
KAPITEL 4. SPINDYNAMIK
die Relaxationszeit zu berechnen, eine entscheidende Rolle. Für manche Werte von k nimmt die
Spinpolarisierung nicht exakt exponentiell ab, wie es in Abbildung 4.14 den Anschein macht,
sondern besitzt zum Beispiel oszillierende Anteile. Der Fit einer einfachen Exponentialfunktion
an den zeitlichen Verlauf kann hier unter Umständen problematisch werden.
In den bisherigen Berechnungen hat sich die numerische Simulation immer sehr gut geschlagen und war zum Beispiel der numerischen Integration der erhaltenen Teillösungen in den Punkten Rechenzeit und Genauigkeit meist überlegen. Im nun vorliegenden Problem stößt man aber
langsam an die Grenzen der Berechenbarkeit. Um Ergebnisse wie die Resonanzkurven in Abbildung 4.14 zu erhalten, benötigt man auf einem guten Laptop Rechenzeit in der Größenordnung
einer Stunde oder mehr. Man könnte natürlich auch versuchen, die numerische Simulation effektiver zu gestalten, beispielsweise indem man den Weg jedes Elektrons in umgekehrter Zeitrichtung durchläuft, um seinen Ausgangspunkt zu finden. Damit kennt man den Spin zur Zeit t = 0
für dieses Elektron und durchläuft den gleichen Weg wieder vorwärts. Mit dieser Methode würde
man nur Elektronen berücksichtigen, die sich letztlich auch in der Nähe des Ursprungs befinden
um zum Ergebnis beizutragen. Für unsere Zwecke reicht die Genauigkeit der Simulation aber
aus. Wir konnten zeigen, dass Spinpolarisierungen mit bestimmter Verteilung langsamer relaxieren als andere. Insbesondere wurde gezeigt, dass radiale „Spinwellen“ mit bestimmter Wellenzahl sehr viel langsamer relaxieren als eine homogene Spinverteilung. Wie wir sehen werden,
ist es sogar möglich, dass gewisse Spinkonfigurationen (persistent spin helix) überhaupt nicht
relaxieren, wenn man zum Rashba-Effekt einen gleich starken Dresselhaus-Effekt hinzunimmt.
4.3. Dresselhaus Spin-Bahn-Kopplung
Wir haben uns in den bisherigen Rechnungen zuerst mit der Ladungsdynamik und in diesem
Kapitel dann mit der Spindynamik eines zweidimensionalen Elektronengases beschäftigt. In
Abschnitt 4.1 haben wir versucht, analytische Lösungen für das verhalten eines ein- und zweidimensionalen Elektronengases mit Spin-Bahn-Kopplung zu finden. Dabei haben wir uns aber auf
den Rashba-Effekt als Spin-Bahn-Kopplung beschränkt und den Dresselhaus-Effekt vernachlässigt. In diesem Abschnitt werden wir, inspiriert von zwei Arbeiten von Munekazu Ohno und
Kanji Yoh, den Dresselhaus-Effekt in unsere Überlegungen miteinbeziehen. Sie haben in [OY07]
und [OY08] für verschiedene Parameterkombinationen der Spin-Bahn-Wechselwirkungen die
Relaxationszeit bzw. die Spindiffusionslängen beschrieben und wir werden unsere Ergebnisse
am Ende des Abschnitts mit ihren vergleichen.
In Abschnitt 4.1.1 hatten wir bereits versucht, eine analytische Lösung für ein System, in
dem sowohl ein beliebig starker Rashba-Effekt, als auch ein beliebig starker Dresselhaus-Effekt
wirkt, zu finden. Dies hat sich jedoch als nicht praktikabel herausgestellt, da sich durch die im
Allgemeinen unterschiedlich starken Spin-Bahn-Kopplungen eine Inhomogenität im Betrag der
Winkelgeschwindigkeit im Bezug auf die Richtung des Impulses ergibt (siehe Gleichung (4.2)
auf Seite 54). Da schon der lineare Term des Dresselhaus-Effektes derartige Probleme bereitete, haben wir nicht versucht, den kubischen Term miteinzubeziehen. Auch in diesem Abschnitt werden wir zunächst keine beliebig verschieden starken Spin-Bahn-Kopplungen zulassen. Stattdessen untersuchen wir zuerst, wie sich ein System verhält, wenn Rashba- und linearer
75
4.3. DRESSELHAUS SPIN-BAHN-KOPPLUNG
KAPITEL 4. SPINDYNAMIK
Dresselhaus-Effekt gleich stark sind. Auf unterschiedlich starken Rashba- und linearen sowie
kubischen Dresselhaus-Effekt werden wir im späteren Verlauf dieses Abschnitts eingehen.
4.3.1. Persistent Spin Helix
Es wäre nun durchaus möglich, die Parameter der beiden Spin-Bahn-Wechselwirkungen mit
a = b1 gleich zu setzen und dann den hier schon mehrfach verwendeten analytischen Lösungsweg auf das Problem anzuwenden. Dies würde mit den ebenfalls schon mehrfach angewandten
Methoden auch zu einer Lösung führen. Es stellt sich bei der Rechnung aber sehr früh heraus,
dass die Lösung mit den bisherigen Ergebnissen zusammen hängt. Wir betrachten zuerst die
vektorielle Winkelgeschwindigkeit:
~ ges
ω
1 −1 0 0
~p =
a~p × ~ez + b1 0 1 0 ~p
0 00
τp |~p|
a=b1
=
1
a(py − px )
1
τp |~p|
0
(4.36)
Und hier wird sofort deutlich, warum wir den Rashba- und den Dresselhaus-Parameter gleich
gesetzt haben. Wir haben zwar im Gegensatz zum System mit ausschließlicher Rashba-SpinBahn-Kopplung keine Winkelgeschwindigkeit konstanten Betrages erhalten, aber die Richtung
der Winkelgeschwindigkeit ist nun konstant. Die Rotationsachse zeigt also unabhängig von der
Bewegungsrichtung des Elektrons in positive oder negative (1,1,0)-Richtung. Der Betrag der
Winkelgeschwindigkeit ist dabei proportional zur Differenz py − px . Wir erinnern uns, dass wir
ein derartiges Verhalten eines Elektrons schon bei der Betrachtung eindimensionalen Spinpolarisierung in Abschnitt 4.1.2 auf Seite 62 beobachtet hatten. Somit verhält sich der Spin eines
Elektrons bei dessen Bewegung exakt, als würde man die Trajektorie auf die (-1,1,0)-Achse
projizieren. Der Spin verhält sich also wie im eindimensionalen Fall. Dies gibt der eindimensionalen Betrachtung auch eine Berechtigung, selbst wenn man nur zweidimensionale Elektronengase untersucht. Auch hier hängt der Spin eines Elektrons nur noch von dessen Position und
nicht mehr von dessen Vergangenheit ab. Es ist also unerheblich, auf welchem Weg das Elektron
seine Position erreicht hat. Wenn jedes Elektron an einem Punkt den gleichen Spin besitzt, ist
dadurch auch die Spinpolarisierung gegeben. Die Ortsabhängigkeit der Spinpolarisierung lautet:
!
a(ry − rx ) 1 1
~s(r)
~s(r) = U(r) ~s(0) = R
(4.37)
0
τp vF
Dieses Verhalten wird im Englischen als „persistent spin helix“ bezeichnet, was in etwa „langlebige Spinspirale“ bedeutet. Versucht man sich den Spin eines Elektrons bildlich vorzustellen,
betrachtet man das Elektron manchmal naiv als Kugel, das sich mit einer bestimmten vektoriellen Winkelgeschwindigkeit, dem Spin, um seine eigene Achse dreht. Das Phänoomen der
persistent spin helix kommt nun folgendermaßen zustande: bewegt sich ein Elektron geradlinig
in (-1,1,0)-Richtung, so bewegt sich die Spitze eines Pfeils in Richtung des Spins mit Ursprung
an der Position des Elektrons entlang einer Art Spirale. In Abbildung 4.15 ist der Versuch unternommen, diese Vorstellung grafisch darzustellen. Da diese Spinpolarisierung nun zeitunabhängig bestehen bleibt, kommt man auf den Begriff der persistent spin helix.
76
4.3. DRESSELHAUS SPIN-BAHN-KOPPLUNG
KAPITEL 4. SPINDYNAMIK
Spin s
z
1,0
0,5
0,0
-0,5
Spin
Ort
-1,0
0
1
2
3
4
5
Ort r
-xy
+ Spin s
6
7
8
9
10
-xy
Abbildung 4.15.: Vorstellung einer persistent spin helix
Abbildung 4.16.: Spinpolarisierung sx,y ~r, t (links) und sz ~r, t (rechts) für gleich starken Rashbaund linearen Dresselhaus-Effekt zum Zeitpunkt t = 10 mit vF = 1, τp = 1, und
a = b1 = 1
77
4.3. DRESSELHAUS SPIN-BAHN-KOPPLUNG
KAPITEL 4. SPINDYNAMIK
Um unsere Behauptungen zu belegen, sind in Abbildung 4.16 die ortsaufgelösten Spinpolarisierungen in x- bzw y-Richtung im linken Bild und in z-Richtung im rechten Bild für eine
initiale Spinpolarisierung in der entsprechenden Richtung eingezeichnet. x- und y-Richtung verhalten sich dabei gleich. Man erkennt sofort die sich ergebende persistent spin helix, die sich
in dieser Auftragung in diagonalen „Spinwellen“, wie wir sie in Gleichung (4.37) vorausgesagt
hatten, äußert. Während der Simulation kann man im Programm sehr gut erkennen, wie sich
der Bereich, in dem sich Elektronen befinden, mit der Zeit ausbreitet, wobei das angesprochene
Muster erzeugt wird und dann zu allen Zeiten gleich bleibt. Im linken Bild, also für die x- bzw.
~ ges ∼ ( 1 1 0 ) im 45◦ -Winkel zum Spin. Die Spinpolariy-Richtung, steht die Rotationsachse ω
sierung in x- bzw. y-Richtung kann sich damit nie umkehren, sondern minimal Null werden.
Dieses Verhalten ist auch im Bild gut zu erkennen. Demgegenüber steht die Rotationsachse im
rechten Bild, also für einen initialen Spin in z-Richtung, senkrecht auf diesem. Folglich erhält
man hier Bereiche, in denen sich die Spinpolarisierung vollständig umkehrt. Dieses Verhalten
ist in genauer Übereinstimmung mit den Ergebnissen von Ohno und Yoh in [OY07].
4.3.2. Spinrelaxationszeit mit Dresselhaus-Effekt
Im bisherigen Verlauf dieser Arbeit haben wir, wenn wir es mit Spin-Bahn-Wechselwirkung zu
tun hatten, entweder nur den Rashba-Effekt oder im letzten Abschnitt zusätzlich einen gleich
starken Dresselhaus-Effekt berücksichtigt. Wir wollen nun versuchen, auch Systeme mit unterschiedlich starkem Rashba- und linearen Dresselhaus-Effekt zu analysieren. Anschließend werden wir auch den Einfluss des kubischen Dresselhaus-Terms auf die Spindynamik untersuchen.
Rashba- und linearer Dresselhaus-Effekt
Die in Abschnitt 2.3 entwickelte analytische Lösungsstrategie versagt, sobald wir versuchen,
einen unterschiedlich starken Rashba- und linearen Dresselhaus-Effekt zu berücksichtigen. Wir
haben den Grund in der Inhomogenität des Betrages der Winkelgeschwindigkeit gefunden. Dies
hat es uns unmöglich gemacht, das Winkelmittel über die Rotationsmatrix R(~
ωges ~p t1 ) analytisch auszuführen. In den vorherigen Kapiteln dieser Arbeit haben wir zwar teilweise auch schon
integrale durch numerische Verfahren gelöst, haben dabei aber auch festgestellt, das dies einige
Probleme, insbesondere bei der Genauigkeit des Ergebnisses und der benötigten Rechenzeit, mit
sich bringt. Theoretisch wäre es zwar möglich, alle vorkommenden Integrale numerisch zu lösen, in der Praxis haben wir aber in Abschnitt 4.1.3 gesehen, dass schon ein zweidimensionales
numerisches Integral schwierig zu berechnen ist. Der Versuch über alle Integrationsvariablen,
bisher immer mit φ, t1 , ω und für ein ortsaufgelöstes Ergebnis auch kx und ky bezeichnet, numerisch zu integrieren, wäre daher sinnlos. Für die Monte-Carlo-Simulation ändert sich durch das
Hinzufügen des Dresselhaus-Terms hingegen nichts Grundlegendes. In Abschnitt 2.4 haben wir
die entwickelte Simulation grob beschrieben. Sowohl linearer als auch kubischer DresselhausTerm wurden dabei mit einer Zeile in Listing 2.3 auf Seite 27 vollständig implementiert.
Wir simulieren also ein zweidimensionales Elektronengas mit Rashba- und Dresselhaus-SpinBahn-Wechselwirkung unterschiedlicher Stärke. Die sich ergebenden ortsabhängigen Spinpolarisierungen für die drei Raumrichtungen sind in Abbildung 4.17 abgebildet. Es wurden hierfür
bis auf den Rashba-Parameter die selben Parameter verwendet, wie im Abschnitt zuvor bei der
78
4.3. DRESSELHAUS SPIN-BAHN-KOPPLUNG
KAPITEL 4. SPINDYNAMIK
Abbildung 4.17.: Spinpolarisierung sx ~r, t (links), sy ~r, t (mitte) und sz ~r, t (rechts) für unterschiedlich starken Rashba- und linearen Dresselhaus-Effekt zum Zeitpunkt t = 10 mit
vF = 1, τp = 1, a = 0,3 und b1 = 1
Beschreibung der persistent spin helix in Abbildung 4.16. Einzig der Rashba-Parameter a wurde auf 0,3 herabgesetzt. Obwohl sich die resultierenden Bilder doch deutlich von denen des
Falls a = b1 unterscheiden, erkennt man doch Parallelen: es ergeben sich für alle drei Raumrichtungen erneut eine Art diagonale Strukturen, die durchaus mit denen der „Spinwellen“ aus
Abbildung 4.16 vergleichbar sind. Im Unterschied zu den vorherigen Bildern ist die transversale Ausdehnung dieser Wellen aber nun stark begrenzt. Für die x- und y-Richtung scheint zudem die Richtung der Wellen verändert zu sein - der Wellenvektor zeigt nicht mehr exakt in
(-1,1,0)-Richtung sondern ist leicht von der betrachteten Raumrichtung weggedreht. Der Fit einer ebenen Welle an die erhaltenen Daten bestätigt dies: man erhält für den Spin in x-Richtung
einen Wellenvektor ~k = ( −0,80 1,09 0 ) und für die y-Richtung erhält man ~k = ( −1,09 0,80 0 ). Die
genaue Übereinstimmung dieser Zahlenwerte ist kein Zufall, sondern exakt. „Spiegelt“ man das
Problem an der (-1,1,0)-Achse, vertauschen die beiden Koordinaten. Außerdem ergeben sich im
Unterschied zur persistent spin helix hier auch Bereiche, in denen sich die Spinpolarisierung
umkehrt (im Bild blau gefärbt). Auch für die z-Richtung ergibt sich ein anderes Bild als zuvor.
Man hat in Abbildung 4.16 ebene Wellen erhalten. Hier ergeben sich ellipsenförmige Wellenberge und -täler. Für den Fall a = 0, also ausschließlicher linearer Dresselhaus-Spin-BahnWechselwirkung, erhält man dagegen kreisförmige Wellen, wie sie auch in Abbildung 4.11 auf
Seite 69 abgebildet sind. Es ergibt sich also ein kontinuierlicher Übergang von kreisförmigen
Wellen für a = 0 über ellipsenförmige Wellen für 0 < a < b1 bis hin zu ebenen Wellen für die
persistent spin helix mit a = b1 .
Betrachtet man die Resultate im zeitlichen Verlauf direkt im Programm, kann man auch erkennen, dass die sich ergebenden Strukturen für a , b1 zeitlich nicht stabil sind. Sie ändern
einerseits ihre Form - auch der oben gefittete Wellenvektor ist nicht konstant - andererseits relaxieren sie auch mit der Zeit. Die Relaxationszeit hängt dabei vom Unterschied von a und b1
ab und ist auch in Abbildung 4.18 zu erkennen. Dort wurden die zeitlichen Verläufe der globalen Spinpolarisierung in x- bzw. y-Richtung und z-Richtung aufgetragen. Man erkennt, dass
die Relaxationszeit der Spinpolarisierung in x- oder y-Richtung bei konstantem DresselhausParameter b1 stark vom Rashba-Parameter a abhängt. Für den Fall a = b1 erkennt man an
der blauen Kurve, dass sich nach einer kurzen Einschwingzeit eine konstante Spinpolarisie-
79
4.3. DRESSELHAUS SPIN-BAHN-KOPPLUNG
1,0
KAPITEL 4. SPINDYNAMIK
1,0
a=0
a=0
a=0.4
a=0.4
0,8
Spinpolarisierung <s
Spinpolarisierung <s (t)>
a=1
z
a=1.2
x,y
(t)>
a=0.8
0,8
a=1.6
a=2
0,6
0,4
a=0.8
a=1
a=1.2
0,6
a=1.6
a=2
0,4
0,2
0,0
0,2
-0,2
0,0
-0,4
0
1
2
3
4
5
6
7
8
9
10
Zeit t
0
1
2
3
4
5
6
7
8
Zeit t
Abbildung 4.18.: Verlauf der globalen Spinpolarisierung hsx,y (t)i (links) und hsz (t)i (rechts) für verschieden starken Rashba-Effekt und konstant starken linearen Dresselhaus-Effekt b1 = 1 mit
vF = 1, τp = 1
rung hsx,y (t)i = 21 einstellt. Dies entspricht dem Mittelwert über die persistent spin helix, wie sie
in Abbildung 4.16 links dargestellt ist. Für diesen Fall ist die Relaxationszeit τx,y also unendlich.
Für Werte a , b1 relaxiert die Spinpolarisierung in endlicher Zeit. Die im rechten Bild dargestellte globale Spinpolarisierung in z-Richtung zeigt ein anderes Verhalten: hier verschwindet
nach einer kurzen Einschwingzeit die Spinpolarisierung vollständig. Auch dies entspricht konsistent dem Mittelwert über die persistent spin helix in Abbildung 4.16 rechts.
Kubischer Dresselhaus-Effekt
Es soll nun der Spezialfall ausschließlich kubischer Dresselhaus-Spin-Bahn-Wechselwirkung,
d.h. a = b1 = 0, betrachtet werden. Für die vektorielle Winkelgeschwindigkeit gilt damit:
px p2y
b3
~ ges ~p =
(4.38)
ω
−py p2x
τp |~p|
0
Es ist zu bemerken, dass auch hier der Betrag nicht unabhängig von der Richtung von ~p ist. So ist
zum Beispiel die Winkelgeschwindigkeit √
für eine Bewegung exakt in x- oder y-Richtung Null,
wobei sie in diagonaler Richtung bis auf 2b3 p2 /τp ansteigt. Auch für den Fall ausschließlich
kubischer Dresselhaus-Spin-Bahn-Wechselwirkung vermag unsere analytische Lösungsmethode keine Ergebnisse zu liefern. Die Ergebnisse der Monte-Carlo-Simulation sollen dem Leser
jedoch nicht vorenthalten werden und sind in Abbildung 4.19 grafisch dargestellt. Es ist gut zu
erkennen, dass sich, wie aus der Betrachtung der Winkelgeschwindigkeit zu erwarten war, kreuzförmige Strukturen ergeben. Am besten sieht man dies an der z-Richtung: in Richtung parallel
zu einer der Achsen ist die Winkelgeschwindigkeit Null und es ergibt sich keine Oszillation - der
Spin relaxiert nur. In diagonaler Richtung hingegen ist die Winkelgeschwindigkeit am größten
und man beobachtet eine beginnende Oszillation - die Spinpolarisierung dreht sich auf dem Weg
vom Ursprung weg ins Negative.
80
4.3. DRESSELHAUS SPIN-BAHN-KOPPLUNG
KAPITEL 4. SPINDYNAMIK
Abbildung 4.19.: Spinpolarisierung sx ~r, t (links), sy ~r, t (mitte) und sz ~r, t (rechts) mit rein kubischem Dresselhaus-Effekt zum Zeitpunkt t = 10 mit vF = 1, τp = 1, a = 0, b1 = 0
und b3 = 1
5
10
Simulation
Axn (User)
Modell
A/x^n
Gleichung
tau
Zeichnen
Fits
4
10
A
7,98891 ± 0,12527
n
2,0033 ± 0,00622
Chi-Quadr Reduziert
0,00269
R-Quadrat(COD)
0,99702
Kor. R-Quadrat
z
Relaxationszeit
3
A/x^n
Gleichung
10
tau
Zeichnen
A
2,16926 ± 0,0233
n
0,61118 ± 0,00658
Chi-Quadr Reduziert
2
10
0,99689
Axn (User)
Modell
1,01467E-4
R-Quadrat(COD)
0,99911
Kor. R-Quadrat
0,99902
1
10
0
10
-1
10
0,01
0,1
1
10
100
kubischer Dresselhaus-Parameter b
3
Abbildung 4.20.: Relaxationszeit τz der Spinpolarisierung in z-Richtung in Abhängigkeit des kubischen
Dresselhaus-Parameters b3 mit vF = 1, τp = 1, a = 0 und b1 = 0
81
4.3. DRESSELHAUS SPIN-BAHN-KOPPLUNG
KAPITEL 4. SPINDYNAMIK
Das Ziel dieses Abschnittes ist es, die Abhängigkeit der Relaxationszeit der Spinpolarisierung
vom Rashba-, linearen und kubischen Dresselhaus-Parameter zu analysieren. Bevor wir uns jedoch drei unabhängigen Parametern annehmen, werden wir zuerst die Relaxationszeit mit ausschließlich kubischer Dresselhaus-Spin-Bahn-Kopplung betrachten. In Abbildung 4.20 ist die
Relaxationszeit der Spinpolarisierung in z-Richtung in Abhängigkeit des kubischen DresselhausParameters b3 aufgetragen. Wir erinnern uns, dass wir für ein System mit ausschließlich RashbaSpin-Bahn-Kopplung in Abschnitt 4.1.1 die Relaxationszeiten bestimmt hatten (siehe Abbildung 4.4 auf Seite 58). Wir hatten dort analytisch und durch die numerische Simulation bestätigt
herausgefunden, dass die Relaxationszeit für schwachen Rashba-Effekt τ = τp /a2 beträgt und
für starken Rashba-Effekt mit τ = 2τp konstant bleibt. Die doppelt logarithmische Auftragung
der Relaxationszeit für den kubischen Dresselhaus-Effekt zeigt zwei Bereiche, in denen die Ergebnisse der Monte-Carlo-Simulation in etwa auf einer Linie liegen. Dies lässt vermuten, dass
ähnliche Relationen für die Relaxationszeit auch hier gelten. Wir versuchen diese mit einem
Fit der Funktion f (x) = A/xn an die entsprechenden Bereiche des Graphen zu bestimmen und
erhalten:
7,989x−2,003 a . 2,5
τz ≈
(4.39)
2,170x−0,6112 2,5 . a . 30
Die numerischen Daten legen also Nahe, dass sich die Relaxationszeit der Spinpolarisierung
in z-Richtung bis auf einen konstanten Faktor für kleine Werte des kubischen DresselhausParameters genauso verhält, wie für kleinen Werte des Rashba- oder linearen DresselhausParameters. Für stärkeren kubischen Dresselhaus-Effekt wird die Relaxationszeit kleiner als die
Relaxationszeit bei ähnlich starkem Rashba- oder linearem Dresselhaus-Effekt.
Rashba-, lineare und kubische Dresselhaus-Spin-Bahn-Kopplung
Es wurden nun die Parameter a, b1 und b3 , die die Stärke der Spin-Bahn-Wechselwirkungen
angeben, separat untersucht. Nun sollen Systeme untersucht werden, in denen alle drei Arten
der Spin-Bahn-Kopplung wirken. Wir verwenden dazu die Spinpolarisierung in x-Richtung, wie
sie für die persistent spin helix in Abbildung 4.16 auf Seite 77 links dargestellt ist. In Abbildung 4.18 auf Seite 80 links sind die zeitlichen Verläufe der Spinpolarisierung in x-Richtung
abgebildet. Für a , b1 und auch für b3 , 0 relaxiert die Spinpolarisierung nach einer kurzen
Einschwingphase ausgehend vom Wert hsx,y i = 21 mit einer bestimmten Relaxationszeit. Wenn
wir also die Einschwingphase ignorieren, können wir durch den Fit einer Exponentialfunktion an den restlichen zeitlichen Verlauf sehr genau die Relaxationszeit bestimmen. Würden wir
hingegen die z-Richtung zur Bestimmung der Relaxationszeit verwenden, stünden wir vor dem
Problem, dass, obwohl die globale Spinpolarisierung sehr schnell relaxiert, Strukturen in der
ortsabhängigen Spinpolarisierung aber sehr langlebig sein können.
Wir berechnen auf diese Art für verschiedene Werte des kubischen Dresselhaus-Parameters b3
die Spinpolarisierung in Abhängigkeit des Rashba-Parameters a bei konstantem linearen Dresselhaus-Parameter b1 = 1. Damit haben wir die Verhältnisse aller Parameter abgedeckt. Die
Ergebnisse sind in Abbildung 4.21 links zu finden. Man erhält erneut Graphen, die Resonanzkurven sehr ähnlich sind. Alle Kurven besitzen ein Maximum in der Nähe von a = 1. Die Höhe
82
4.3. DRESSELHAUS SPIN-BAHN-KOPPLUNG
KAPITEL 4. SPINDYNAMIK
2,0
4
10
Maximale Relaxationszeit
b =0
3
10
b =0,1
Resonanzparameter a
4
3
max
1,8
Fit
b =0,15
3
1,6
3
x,y
3
x,y
b =0,4
1,4
3
Relaxationszeit
Relaxationszeit
10
b =0,25
b =0,6
3
b =1
2
10
3
b =1,5
3
b =2,5
3
10
1,2
10
1
1,0
10
b =4
2
0
0,8
Rashba-Parameter a
3
10
3
1
10
b =6
3
10
0,6
-1
0,4
0
10
0,0
0,5
1,0
1,5
2,0
2,5
3,0
0
0,1
kubischer Dresselhaus-Parameter b
Rashba-Parameter a
1
3
Abbildung 4.21.: Relaxationszeit τx,y in Abhängigkeit des Rashba-Parameters a für verschiedene Werte
des kubischen Dresselhaus-Parameters b3 (links) und Resonanzparameter in Abhängigkeit von b3 (rechts) jeweils mit vF = 1, τp = 1 und b1 = 1
des Maximums nimmt dabei, wie zu erwarten war, mit steigendem b3 ab. Anschaulich erklärt bedeutet dies, dass ein kubischer Dresselhaus-Effekt eine Spinrelaxation bewirkt, die die persistent
spin helix zerstört. Der Rashba-Parameter a, bei dem die Relaxationszeit am größten ist, wird
mit steigendem b3 ebenfalls kleiner, d.h. die Maxima sind leicht nach links verschoben. Dieses
Verhalten ist konsistent mit der Bezeichnung der Kurven als Resonanzkurven. Dabei übernimmt
der kubische Dresselhaus-Effekt eine Rolle ähnlich der Dämpfung in einem schwingenden System. In Abbildung 4.21 rechts sind die Positionen der Maxima amax eingezeichnet. Auch hier
sieht man, dass sowohl der Wert des Rashba-Parameters a, bei dem Resonanz auftritt, als auch
die maximale Relaxationszeit τx,y mit steigender Stärke des kubischen Dresselhaus-Effekts b3
abnehmen.
Unsere Ergebnisse sollen nun mit denen von Ohno und Yoh verglichen werden. Dabei ist jedoch Vorsicht geboten, da Ohno und Yoh in ihren Berechnungen zur Spinrelaxation nicht nur die
Relaxationszeit beschreiben, sondern auch die Spindiffusionslänge als Maß heranziehen. Da es
sich bei der Bewegung der Elektronen aber um einen Random Walk handelt, sind die Spindiffusionslänge und die Relaxationszeit über die mittlere Ausbreitungsgeschwindigkeit der Elektronen
miteinander verknüpft und können qualitativ miteinander verglichen werden. Wir haben zuvor
bereits festgestellt, dass unsere Ergebnisse im Fall a = b1 und b3 = 0, also der persistent spin helix, mit denen von Ohno und Yoh übereinstimmen. Um die restlichen Ergebnisse zu vergleichen,
wurden unsere Ergebnisse grafisch über die Diagramme von Ohno und Yoh aus der Onlineversion ihrer Paper gelegt. So lässt sich in etwa erkennen, ob die Ergebnisse übereinstimmen, ohne
die numerischen Daten von Ohno und Yoh zur Verfügung zu haben. Wir vergleichen unsere
Relaxationszeit aus Abbildung 4.21 für b3 = 0 mit Abbildung 1 aus [OY07] und stellen fest,
dass die Verläufe der Graphen zwar grob zusammen passen - insbesondere in der Umgebung
der Resonanz decken sich die Ergebnisse näherungsweise - an anderer Stelle jedoch signifikant
voneinander abweichen. So berechnen wir für alle Werte von a eine größere Relaxationszeit als
Ohno und Yoh. Dies könnte nun verschiedene Ursachen haben: zum Einen verwenden Ohno
83
4.4. ANISOTROPE STREUUNG
KAPITEL 4. SPINDYNAMIK
und Yoh andere Parameter für ihre Simulation - sie lehnen die Werte der Simulationsparameter an reale Messdaten an, wohingegen wir diese Parameter normalisiert gewählt haben. Zum
andern können auch die Methoden, die verwendet werden um die Relaxationszeit zu ermitteln,
Einfluss auf die Daten haben. Ohno und Yoh zeigen auch zwei Graphen für Ergebnisse mit kubischem Dresselhaus-Term. Der Vergleich mit unseren Resultaten zeigt wieder, dass die Formen
zwar ähnlich sind, die Zahlenwerte jedoch voneinander abweichen. Es ist zu beachten, dass wir
hier zwei unterschiedliche Größen, die Relaxationszeit und die Spindiffusionslänge, vergleichen.
Obwohl diese Größen über die Ausbreitungsgeschwindigkeit beim Random Walk miteinander
in Beziehung stehen, handelt es sich hier also nur um einen qualitativen Vergleich. Zusätzlich
wird in [OY07, S. 3] die Position des Maximums mit amax = b1 − Ab3 angegeben, wobei A aus
den Simulationsparametern resultiert. Da wir im rechten Diagramm in Abbildung 4.21 eine logarithmische x-Achse gewählt haben, um einen größeren Parameterbereich für b3 abzudecken,
ist nicht ohne Weiteres erkennbar, ob sich die Position des Maximums linear aus b3 ergibt, wie
von Ohno und Yoh vorgeschlagen. Betrachtet man das gleiche Bild mit linearer x-Achse sieht
man, dass für nicht allzu große b3 tatsächlich ein linearer Zusammenhang gilt. Wir fitten die
angegebene Funktion für b3 ≤ 1,5 und erhalten:
amax ≈ b1 − 0,287b3
(4.40)
Im Bild ist dieser Verlauf grün eingezeichnet und man sieht, dass er die Position des Maximums in etwa wiedergibt. Es ergeben sich aber doch sichtbare Abweichungen, insbesondere für
größere Werte von b3 und damit kleinere Relaxationszeiten.
Es haben sich hier zwar einige Abweichungen von den Resultaten von Ohno und Yoh ergeben, die durch unterschiedliche Rahmenbedingungen zu erklären waren, zusammenfassend
lässt sich aber sagen, dass unsere Ergebnisse mit denen von Ohno und Yoh konsistent waren. In
diesem Abschnitt haben wir also nun, zusätzlich zu der schon behandelten Rashba-Spin-OrbitWechselwirkung, auch verschiedene Aspekte der Dresselhaus-Spin-Bahn-Kopplung mit in unser
Modell eingearbeitet. Dabei konnten wir den Effekt der persistent spin helix zufriedenstellend
erklären. Im allgemeinen Fall war zwar keine analytische Analyse des Modells mehr möglich,
wir konnten aber mit Hilfe der numerischen Simulation zeigen, dass unsere Resultate sowohl
untereinander als auch mit Ergebnissen aus der Literatur konsistent sind.
4.4. Anisotrope Streuung
Im letzten Abschnitt haben wir unser Modell eines zweidimensionalen Elektronengases um
die Dresselhaus-Spin-Bahn-Wechselwirkung erweitert und die Auswirkungen ausführlich analysiert. Es soll nun ein anderer Aspekt des Modells verändert werden. Wir werden uns nochmals
mit anisotroper Störstellenstreuung beschäftigen. In Abschnitt 3.2.2 hatten wir uns bereits mit
der Ladungsdynamik unter Einfluss eines elektrischen Feldes und anisotroper Störstellenstreuung beschäftigt. Hier soll nun die Spindynamik für ein zweidimensionales Elektronengas mit
Rashba-Spin-Bahn-Wechselwirkung und anisotroper Störstellenstreuung analysiert werden. Ein
elektrisches Feld werden wir hier im Gegensatz zur Ladungsdynamik nicht berücksichtigen. Bei
den Berechnungen zur Ladungsdynamik in Abschnitt 3.2.2 war es uns möglich, eine beliebige
Anisotropie in der Winkelverteilungsfunktion der Störstellenstreuung zu berücksichtigen.
84
4.4. ANISOTROPE STREUUNG
KAPITEL 4. SPINDYNAMIK
Um die Anisotropie in das analytische Modell aus Abschnitt 2.3 mit einzubeziehen, müssen
wir uns erneut die Zeitentwicklung eines einzelnen Elektrons vornehmen. In Gleichung (2.44)
auf Seite 20 haben wir die Zeitentwicklung der Spinpolarisierung für ein System, dessen Elektronen genau einmal gestreut werden, beschrieben. Eine anisotrope Störstellenstreuung wird
durch eine Winkeldichtefunktion w(φ) beschrieben. Sie beschreibt die Wahrscheinlichkeit, dass
ein Elektron bei einer Streuung eine Änderung des Impulses - also der Flugrichtung - um den
Winkel φ erfährt. Bei der Beschreibung der Zeitentwicklung der Spinpolarisierung wurde mit φ1
über den Winkel des ersten Flugabschnitts, also bis zum Zeitpunkt der Streuung t1 , und mit φ2
über den Winkel des zweiten Flugabschnitts, also vom Zeitpunkt der Streuung t1 bis t = t1 + t2
integriert. Um nun die anisotrope Streuung zu beschreiben genügt es, in dieser Integration die
Winkeldichtefunktion für die Winkeländerung von φ1 hin zu φ2 in Form von w(φ2 − φ2 ) miteinzubeziehen. Man erhält für die Zeitentwicklung:
U2 (t) =
Z∞
Z2π
dt2 p(t2 )
0
0
dφ2 ~ ges ~p2 t2
R ω
2π
Z∞
Z2π
dt1 p(t1 )
0
t1 + t2 − t
dφ1
~ ges ~p1 t1 δ
w(φ2 − φ1 )R ω
2π
τp
!
0
mit ~pi = pF
cos φi sin φi
0
In dieser Gleichung lassen sich nun aber die Integrale über t1 und φ1 und die über t2 und φ2
nicht mehr einzeln ausführen, da die Integranden nun über die Winkeldichtefunktion w(φ2 − φ1 )
miteinander in Beziehung stehen und somit nicht mehr unabhängig sind. Damit kann man die
Anzahl der Streuungen nicht mehr wie in Gleichung (2.47) auf Seite 21 als Potenz schreiben und
unsere Lösungsstrategie versagt. Um die Unabhängigkeit der Integranden wieder herzustellen
wählt man eine spezielle Form der Anisotropie:
w(φ2 − φ1 ) = 1 + cos(φ2 − φ1 ) =
= 1 + cos(φ2 ) cos(φ1 ) + sin(φ2 ) sin(φ1 )
(4.41)
Wir haben diese Anisotropie bereits in Gleichung (3.53) auf Seite 47 als einfachste Möglichkeit, einen nicht verschwindenden Wert in hhcos φii zu erhalten, verwendet. Der Parameter beschreibt die Stärke und „Richtung"der Anisotropie. Ein Wert −1 ≤ < 0 beschreibt vorwiegende Rückstreuung, 0 < ≤ 1 steht für bevorzugte Vorwärtsstreuung. Für = 0 erhält man
isotrope Streuung. Um zu verstehen, warum diese spezielle Anisotropie für unsere Rechnungen
vorteilhaft ist, müssen wir die Zeitentwicklung für mehr als eine Streuung untersuchen. Da die
Formeln dabei recht lang werden, ist im Folgenden nur das Wesentliche für die Überlegungen
zur Anisotropie abgedruckt. Wir wählen dabei eine vereinfachte Schreibweise für die Integrale
ohne Integrationsgrenzen, deuten die Differentiale sowie die Deltafunktion durch „...“ an und
~ ges ~p weglassen und die Abhänvereinfachen die Notation der Rotationsmatrix indem wir ω
gigkeit von der Richtung des Impulses explizit schreiben. Wir erhalten für die Zeitentwicklung
eines Systems dessen Elektronen genau zwei mal gestreut werden:
Z
U3 (t) = ... R φ3 , t3 w φ3 − φ2 R φ2 , t2 w φ2 − φ1 R φ1 , t1 =
Z
= ... R φ3 , t3 R φ2 , t2 R φ1 , t1
1 + cos(φ3 ) cos(φ2 ) + sin(φ3 ) sin(φ2 ) 1 + cos(φ2 ) cos(φ1 ) + sin(φ2 ) sin(φ1 ) = . . .
85
4.4. ANISOTROPE STREUUNG
KAPITEL 4. SPINDYNAMIK
Dabei haben wir in der zweiten Zeile die gewählte Winkeldichtefunktion (4.41) eingesetzt. Um
die beiden Winkeldichtefunktionen auszumultiplizieren definiert man folgende Matrix M(φ) mit
den Summanden der Winkeldichtefunktion:
√
√
cos φ
sin φ
1
√
M(φ) := cos φ
(4.42)
cos2 φ
cos φ sin φ
√
2
sin φ cos φ sin φ
sin φ
Man kann nun das Produkt der beiden Winkeldichtefunktionen w(φ3 − φ2 ) und w(φ2 − φ1 ) ausmultiplizieren und durch Summen über die Elemente der Matrix M(φ) darstellen:
... =
Z
3 X
3
X
... R φ3 , t3 R φ2 , t2 R φ1 , t1
M1r φ3 Mrs φ2 M s1 φ1 = . . .
r=1 s=1
Man erkennt, dass die beiden Summen genau die (1,1)-Komponente des Matrixproduktes der
drei M(φi ) berechnen:
Z
. . . = ... R φ3 , t3 R φ2 , t2 R φ1 , t1 M(φ3 )M(φ2 )M(φ1 ) = . . .
11
Da Matrixprodukte im Allgemeinen nicht kommutieren, können wir die Matrizen nicht einfach
umsortieren, um die Zeitentwicklung als Matrixpotenz zu schreiben. Wir können dies aber mit
dem Kronecker-Produkt umgehen:
Z . . . = ... M(φ3 ) ⊗ R(φ3 , t3 ) M(φ2 ) ⊗ R(φ2 , t2 ) M(φ1 ) ⊗ R(φ1 , t1 )
(4.43)
[1.. 3; 1.. 3]
Dieses Ergebnis bedarf etwas genauerer Erklärung: wir bilden hier drei mal das Kronecker
Produkt von M(φi ) und R(~
ωges ~pi ti ). Es handelt sich hierbei um zwei 3 × 3-Matrizen, womit
das Kronecker-Produkt eine 9 × 9-Matrix liefert. Dann wird das Matrixprodukt dieser drei 9 × 9Matrizen gebildet und schließlich, dargestellt durch die Notation ( . )[1.. 3; 1.. 3] , die obere linke
3 × 3-Matrix herausgegriffen. Erst dann werden die Integrale ausgeführt.
Wir haben unsere Rechnung damit auf den ersten Blick zwar verkompliziert, unser Ziel aber
erreicht: die Integrationsvariablen sind im Integranden nun wieder nach Index gruppiert. Wir
können die Zeitentwicklung eines Systems dessen Elektronen genau n − 1 mal gestreut werden
nun wieder über eine Matrixpotenz schreiben:
Un (t) = τp
Z∞
dω −iωt n e
F (ω)
[1.. 3; 1.. 3]
2π
(4.44)
−∞
F(ω) =
Z∞
Z2π
dt1 p(t1 ) e
0
iωt1
dφ1 ~ ges ~p1 t1
M φ1 ⊗ R ω
2π
0
Damit haben wir das Problem der anisotropen Streuung für die spezielle Form der Anisotropie
aus Gleichung (4.41) vollständig gelöst. Wir müssen zwar noch über alle möglichen Streuanzahlen, also von 1 bis ∞ summieren, die weiteren Betrachtungen aus Abschnitt 2.3 behalten aber
86
4.4. ANISOTROPE STREUUNG
KAPITEL 4. SPINDYNAMIK
ihre Gültigkeit und wir erhalten für die zeitabhängige Spinpolarisierung eines zweidimensionalen Elektronengases mit Rashba-Spin-Bahn-Wechselwirkung und anisotroper Streuung:
~s(t) = U(t) ~s(0) U(t) = τp
Z∞
−∞
∞
Z
∞
−1 dω −iωt X n dω −iωt e
F (ω)
= τp
e
F(ω) 1 − F(ω)
[1.. 3; 1.. 3]
2π
2π
[1.. 3; 1.. 3]
n=1
−∞
Es handelt sich bei F(ω) zwar nun um eine 9 × 9-Matrix, für die Rechnung macht dies aber
keinen Unterschied: auch eine 9 × 9-Matrix lässt sich problemlos invertieren. Die Rechnungen
per Hand durchzuführen wäre zwar theoretisch möglich, aber unnötiger Aufwand. Wir führen
die beschriebenen Schritte mit Mathematica aus und erhalten:
2
2 i(a +i(−2+2iτp ω)(i+τp ω))
0
0
a (i+2τp ω)−τp ω(i+τp ω)(2i−i+2τp ω)
−1 (4.45)
..
F(ω) 1 − F(ω)
=
.
0
0
[1.. 3; 1.. 3]
2−−2iτp ω
0
0
2a2 +iτp ω(−2+2τp ω)
Die (2,2)-Komponente entspricht der (1,1)-Komponente und ist deshalb hier nicht mit angegeben. Da wir auch bei der anisotropischen Störstellenstreuung keine Richtung ausgezeichnet
haben, verhalten sich x- und y-Richtung folglich wieder gleich. Es bleibt noch die ω-Integration
auszuführen. Man erhält für die z-Richtung mit den Polstellen bei
p
−2i + i ± 16a2 − ( − 2)2
(4.46)
ω1,2 =
4τp
und dem Residuensatz:
U(t)33 = −iτp
2
X
i=1
e−iωt
Resωi
2 − − 2iτp ω
2a2 + iτp ω( − 2 + 2τp ω)
e
=
(−2)t
4τp
A cos
At
4τp
− ( − 2) sin
At
4τp
Aτp
(4.47)
A=
p
(2 − + 4a)(−2 + + 4a)
Auch für die x- und y-Richtung lasst sich das Integral mit dem Residuensatz ausführen. Da es
sich beim Nenner von Gleichung (4.45) dann aber um ein Polynom dritten Grades handelt, erhält
man auch drei Polstellen und folglich ein Ergebnis, das bei weitem nicht mehr so kompakt darstellbar ist wie das der z-Richtung. Es wird daher auf die vollständige Angabe des Ergebnisses
verzichtet und nur in Abbildung 4.22 links grafisch dargestellt. Die Resultate für die z-Richtung
sind im rechten Bild abgedruckt. Zusätzlich zu den analytischen Ergebnissen sind auch die Daten
der Monte-Carlo-Simulation für die gleiche anisotrope Streuung mit eingezeichnet. Die numerischen Daten decken sich dabei perfekt mit den analytischen Ergebnissen. Dies spricht für die
Korrektheit beider Resultate. Die Winkeldichtefunktion wurde in der numerischen Simulation
über eine stückweise lineare Verteilung realisiert, wobei darauf geachtet wurde, dass der Kosinus
aus Gleichung (4.41) in genügend kleinen Intervallen abgetastet wurde.
In den Bildern wird deutlich, dass die Anisotrope einen starken Einfluss auf den Verlauf der
Spinpolarisierung hat. Es ist jedoch anhand der Verläufe der Spinpolarisierung nicht auf den ersten Blick erkennbar, wie sich die Anisotropie im Detail auf die Spinpolarisierung auswirkt. Für
87
4.4. ANISOTROPE STREUUNG
KAPITEL 4. SPINDYNAMIK
1,0
1,0
=-1
=-1
=0
Spinpolarisierung <s (t)>
Spinpolarisierung <s
=-0,5
0,8
=0
0,8
=0,5
x,y
=1
Simulation
0,6
=0,5
0,6
=1
z
(t)>
=-0,5
0,4
0,2
Simulation
0,4
0,2
0,0
-0,2
-0,4
0,0
-0,6
0
2
4
6
8
10
0
2
4
Zeit t
6
8
10
Zeit t
Abbildung 4.22.: Verlauf der Spinpolarisierung hsx,y (t)i (links) und hsz (t)i (rechts) für verschieden starke
Anisotropien der Form (4.41) mit vF = 1, τp = 1 und a = 1
Simulation
4,0
Simulation
4,0
analytisch
analytisch
z
Relaxationszeit
Relaxationszeit
x,y
3,5
3,5
3,0
2,5
3,0
2,5
2,0
2,0
1,5
1,5
-1,0
1,0
-0,5
0,0
0,5
1,0
Anisotropieparameter
-1,0
-0,5
0,0
0,5
1,0
Anisotropieparameter
Abbildung 4.23.: Relaxationszeit τx,y und τz der Spinpolarisierung in x- bzw. y-Richtung (links) und zRichtung (rechts) in Abhängigkeit des Anisotropieparameters mit vF = 1, τp = 1 und
a=1
88
4.5. MAGNETISCHES FELD
KAPITEL 4. SPINDYNAMIK
kleine Zeiten t . 2,5 bewirkt eine bevorzugte Vorwärtsstreuung > 0 ein rascheres Abfallen
der Spinpolarisierung in allen Raumrichtungen. Für Raumrichtungen in der xy-Ebene fällt die
Spinpolarisierung bis auf Null ab, für die z-Richtung hingegen bis weit ins Negative. Für eine
starke Rückstreuung ≈ 1 erhält man hingegen in allen Raumrichtungen einen Kriechfall. Man
könnte also annehmen, dass die Spinrelaxationszeit mit dem Anteil der Rückstreuung steigt. Für
die z-Richtung ist aber das Gegenteil der Fall. Für starke Vorwärtsstreuung fällt die Spinrelaxation zwar schnell ab, schwingt dann aber um so länger, je größer der Anteil der Vorwärtsstreuung
ist. Um dieses Verhalten genauer zu überprüfen, berechnen wir aus den Polstellen gemäß Gleichung (4.10) auf Seite 58 die Relaxationszeiten. Zusätzlich ermitteln wir die Relaxationszeiten
durch einen geeigneten Fit an die Simulationsergebnisse. Die Resultate sind in Abbildung 4.23
dargestellt. Unsere ersten Beobachtungen werden bestätigt: die Relaxationszeit bezogen auf den
Anisotropieparameter verhält sich für Raumrichtungen in der xy-Ebene und die z-Richtung signifikant unterschiedlich. In der xy-Ebene fällt die Relaxationszeit mit steigendem Anisotropieparameter . Dabei besteht ein ungefähr linearer Zusammenhang zwischen den beiden Größen.
Für die z-Richtung steigt die Relaxationszeit dagegen mit steigendem Anisotropieparameter ,
also mit steigendem Anteil der Vorwärtsstreuung. Die Relaxationszeit hängt dabei ungefähr exponentiell von ab. Dieses grundlegend verschiedene Verhalten ist anschaulich nicht einfach
zu erklären. Es lässt sich aber unter Betrachtung der Polstellen - die die Relaxationszeit und
Frequenz der jeweiligen Schwingung definieren - etwas genauer analysieren. Man erhält in allen Raumrichtungen zwei Polstellen, deren Imaginärteil mit dem Anisotropieparameter steigt,
d.h. die Relaxationszeit der entsprechenden Schwingung sinkt. Für den Fall eines Spins in der
x- oder y-Richtung erhält man aber, wie oben erwähnt, drei Polstellen und der Imaginärteil der
dritten Polstelle ist kleiner als der der ersten beiden und sinkt mit kleiner werdendem weiter.
Diese dritte Polstelle ist also für die größere Relaxationszeit eines Spins in x- oder y-Richtung
bei bevorzugter Rückstreuung verantwortlich.
Obwohl wir dieses Verhalten anschaulich nicht erklären können, liefern die analytische Rechnung und die Monte-Carlo-Simulation das gleiche Ergebnis. In den Bildern sieht man, dass die
numerischen Ergebnisse genau zum Verlauf der analytischen passen. Damit kann davon ausgegangen werden, dass es sich hierbei nicht um einen Fehler in unserer Rechnung oder ein Artefakt
der Simulation handelt, sondern dass diese Voraussagen das Modell korrekt beschreiben. Damit
wollen wir die Betrachtung der anisotropen Streuung abschließen und uns im nächsten Abschnitt
einem anderen Aspekt des Modells widmen.
4.5. Magnetisches Feld
In den bisherigen Abschnitten haben wir uns in erster Linie mit den intrinsischen Eigenschaften des ein- und zweidimensionalen Elektronengases beschäftigt. In den nun folgenden zwei
Abschnitten werden wir Effekte betrachten, die in gewisser Weise von außen auf das Elektronengas wirken. Wir beginnen mit einem äußeren Magnetfeld. Bei der Herleitung der Bewegungsgleichungen in Abschnitt 2.2 haben wir ein magnetisches Feld bereits in die Überlegungen miteinbezogen und sind zu dem Schluss gekommen, dass die beiden Effekte der Spin-BahnWechselwirkung und ein äußeres magnetisches Feld gleich wirken und zusammen die Spinprä
~ ges ~p bewirken. Diese lautet für ein zweidizession mit vektorieller Winkelgeschwindigkeit ω
89
4.5. MAGNETISCHES FELD
KAPITEL 4. SPINDYNAMIK
mensionales Elektronengas mit Rashba-Spin-Bahn-Wechselwirkung und äußerem magnetischen
Feld:
a ~p × ~ez
~
~ ges ~p =
ω
− γs B
τp |~p|
(4.48)
Der erste Term beschreibt den Rashba-Effekt und liegt in impulsabhängiger Richtung in der
xy-Ebene. Daraus folgt für unsere Berechnungen die Richtung des äußeren Magnetfeldes: wir
können in den analytischen Rechnungen nur ein Magnetfeld in z-Richtung berücksichtigen. Ist
das Magnetfeld nicht exakt parallel zur z-Richtung, erhalten wir einen von der Richtung des
Impulses abhängigen Betrag der Winkelgeschwindigkeit. Die sich dadurch ergebenden Probleme wurden in Abschnitt 4.1.1 bereits genauer besprochen und machen uns auch hier die Winkelintegration unmöglich. Beschränken wir uns aber auf ein Magnetfeld in z-Richtung bilden
Rashba-Magnetfeld und äußeres Magnetfeld ein rechtwinkliges Dreieck und wir erhalten als
Hypotenuse die Winkelgeschwindigkeit mit konstantem Betrag. Wir verwenden also für das äußere Magnetfeld im Folgenden:
0
1
~
B=−
0
γs τp
Bz
(4.49)
Es wurde nicht nur die Richtung festgelegt, sondern auch eine Skalierung vorgenommen. Wir definieren den dimensionslosen Parameter Bz analog zum Rashba-Parameter a in Gleichung (2.33)
auf Seite 17 um die folgenden Rechnungen etwas zu vereinfachen. Alle folgenden Rechnungen
verlaufen gemäß dem schon mehrfach angewandten Modell aus Abschnitt 2.3.2. Wir führen das
Winkelmittel und die Zeitintegration gemäß Gleichung (2.46) auf Seite 21 aus und erhalten:
2
i(a2 −2(i+τp ω)
Bz τp
−
0
2(i+τp ω)(a2 +B2z −(i+τp ω)2 )
a2 +B2z −(i+τp ω)2
2 −2(i+τ ω 2
i
a
B
τ
(
)
p
z
p
(4.50)
F(ω) =
0
2
2
2
2
2
2
a +Bz −(i+τp ω)
2(i+τp ω)(a +Bz −(i+τp ω) )
i( B2z −(iτp ω)2 )
0
0
(i+τp ω)(a2 +B2z −(i+τp ω)2 )
Auch hier ergibt sich wieder, wie in dieser Arbeit schon des öfteren, ein unterschiedliches Verhalten für Spinpolarisierungen in der xy-Ebene und in z-Richtung. Die Resultate für die x- bzw.
y-Richtung sind auch in diesem Abschnitt wieder sehr unhandlich und werden deshalb nicht explizit abgedruckt, deren Berechnung stellt aber abgesehen von der Länge der Formeln keinerlei
Probleme dar. In diesem Fall trifft dies auch auf die z-Richtung zu, allerdings lassen sich hier
zumindest die Polstellen, und damit die Relaxationszeiten noch mit akzeptablem Platzaufwand
angeben. Mit
i B2z − (i + τp ω)2
F33 (ω)
=
(4.51)
1 − F33 (ω) a2 (i + τp ω) + τp ω B2z − (iτp ω)2
90
4.5. MAGNETISCHES FELD
KAPITEL 4. SPINDYNAMIK
1,0
1,0
B =0,1
B =0,1
B =0,2
B =0,2
z
0,8
z
z
0,8
B =0,5
0,6
z
Spinpolarisierung <s (t)>
Spinpolarisierung <s
B =1
z
0,4
B =2
z
Simulation
0,2
B =0,5
z
B =1
z
z
x,y
(t)>
z
0,0
-0,2
-0,4
B =2
0,6
z
Simulation
0,4
0,2
-0,6
0,0
-0,8
-1,0
-0,2
0
2
4
6
8
10
0
2
Zeit t
4
6
8
10
Zeit t
Abbildung 4.24.: Verlauf der Spinpolarisierung hsx,y (t)i (links) und hsz (t)i (rechts) für verschieden starke
äußere Magnetfelder mit vF = 1, τp = 1 und a = 1
liegen diese bei:
2i
+
ω1 = −
3τp
√3 √3
2 1 − 3a2 − 3B2z τp
A
− √3
√3
3 A
3 2τ3p
√ √ √3
2 − 3B2 τ
3
1
−
3a
3 A
1
±
i
1
∓
i
p
2i
z
−
+
=−
√3
√3 2
3τp
3 4A
6 2τp
(4.52)
ω2,3
A = −i −2 + 9a −
2
18B2z
√
τp + 3 3
r
(4.53)
2 −4a6 − 4a2 B2z −5 + 3B2z − a4 −1 + 12B2z − 4 Bz + B3z τ12
p
Auch wenn dieses Ergebnis auf den ersten Blick recht wenig Aussagekraft besitzt, so kann man
zumindest eine Schlussfolgerung daraus ziehen: die Stärke des äußeren Magnetfeldes taucht nur
in geraden Potenzen auf. Diese Tatsache berechtigt zu der Aussage, dass die Relaxationszeit
invariant unter Umkehrung des Magnetfeldes ist.
Es wird hier auf die Angabe des exakten Ergebnisses für die Spinpolarisierung verzichtet, da
dies hier in etwa zwei bis drei Seiten beanspruchen würde. Stattdessen wird als Beispiel nur das
Ergebnis für eine spezielle Wahl der Parameter, τp = 1, a = 1 und Bz = 1, angegeben:
hsz (t)i = 0,722124e−0,43015t + 0,49075e−0,78492t cos(1,30714t − 0,968875)
(4.54)
Für die x- bzw. y-Richtung erhält man im Nenner von Gleichung (4.51) ein Polynom sechsten
Grades in ω und damit auch insgesamt sechs Polstellen, womit das Ergebnis noch um einiges
länger wird. Zur exakte Berechnung wurde daher mit Mathematica ein Computeralgebrasystem
herangezogen, womit diese keine Schwierigkeit mehr darstellt.
In Abbildung 4.24 sind die Ergebnisse grafisch dargestellt. Es wurden erneut die Ergebnisse
der Monte-Carlo-Simulation mit eingezeichnet. Analytisch berechnete und simulierte Verläufe
der Spinpolarisierung passen für jede Raumrichtung perfekt zusammen. Damit kann auch die
91
4.5. MAGNETISCHES FELD
KAPITEL 4. SPINDYNAMIK
Simulation
Simulation
4
4
10
analytisch
3
z
2
10
1
10
2
10
1
10
10
0
0
10
0,01
analytisch
3
10
Relaxationszeit
Relaxationszeit
x,y
10
10
0,1
1
10
100
Stärke des äußeren Magentfelds B
0,01
0,1
1
10
100
Stärke des äußeren Magentfelds B
z
z
Abbildung 4.25.: Relaxationszeit τx,y und τz der Spinpolarisierung in x- bzw. y-Richtung (links) und zRichtung (rechts) in Abhängigkeit der Stärke des äußeren Magnetfeldes Bz mit vF = 1,
τp = 1 und a = 1
analytische Rechnung dieses Abschnitts als korrekt betrachtet werden. Wie zu erwarten war,
induziert ein externes Magnetfeld eine mehr oder weniger starke Oszillation in der Spinpolarisierung. Für die x- und y-Richtung ist diese Schwingung sehr stark ausgeprägt. Die Frequenz
dieser Schwingung steigt naturgemäß mit der Stärke des Magnetfeldes. Dies ist besonders in
den Verläufen der x- und y-Richtung gut zu erkennen. Im Verlauf der Spinpolarisierung in zRichtung hingegen ist die Oszillation nur für kleine Zeiten zu erkennen und verschwindet dann
mit der Zeit. Außerdem lässt sich an den Bildern erahnen, dass die Relaxationszeit für ein stärkeres externes Magnetfeld ansteigt, d.h. das äußere Magnetfeld wirkt spinerhaltend. Dies lässt
sich erklären, wenn man sich überlegt, wie sich die vektorielle Winkelgeschwindigkeit für extrem starke Magnetfelder verhält: um so größer das externe Magnetfeld ist, um so geringer wird
der Einfluss des Rashba-Effekts im Vergleich. Für extrem starke Magnetfelder |Bz | 0 ist die
~ ges ~p näherungsweise konstant und damit unabhängig von ~p. Damit
Winkelgeschwindigkeit ω
kann die Spinpolarisierung nicht relaxieren.
Zur genaueren Untersuchung tragen wir die Relaxationszeit τ in Abhängigkeit von der Stärke des äußeren Magnetfeldes auf. Die Ergebnisse sind in Abbildung 4.25 zu finden. Man sieht,
dass relativ kleine Magnetfelder, Bz . 0,1, die Spinrelaxation nicht oder nur sehr wenig beeinflussen. Für mittelstarke Magnetfelder, 0,1 . Bz . 0,5, verstärkt das Magnetfeld hingegen die
Spinrelaxation leicht, d.h. die Relaxationszeit sinkt. Dies war in den zeitlichen Verläufen der
Spinpolarisierung so nicht ohne weiteres zu erkennen. Relativ starke Magnetfelder, Bz & 0,5,
wirken dann, wie aus Abbildung 4.24 schon ersichtlich war, spinerhaltend und die Spinrelaxationszeit steigt mit größer werdendem Bz stark an. Die Monte-Carlo-Simulation sagt auch hier mit
der analytischen Rechnung konsistente Relaxationszeiten voraus. Es ergeben sich zwar insbesondere im Bereich der Minima kleinere Abweichungen - die Relaxationszeiten der Simulation
sind etwas zu klein - jedoch handelt es sich dabei um Artefakte des Fits, der zur Bestimmung
der Relaxationszeit verwendet wurde.
92
4.6. EINFLUSS VERSCHIEDENER WÄNDE
KAPITEL 4. SPINDYNAMIK
Nun könnte man hoffen, einen technisch wertvollen Mechanismus zur Unterdrückung der
Spinrelaxation gefunden zu haben, der im besten Fall zur Realisierung von spintronischen Bauteilen ausgenutzt werden könnte. Wir haben aber in unseren Betrachtungen die Lorentzkraft
vernachlässigt und in Gleichung (2.6) auf Seite 13 eine Bedingung für die Gültigkeit dieser
Vereinfachung gegeben. Diese lautet:
~ m ≈ 5,68562 · 10−12 Ts
τp | B|
|q|
(4.55)
Dabei bezeichnet m die Masse des Elektrons und q dessen Ladung. Auf der anderen Seite ergibt
sich nur für einen Wert von Bz & 1 eine spinerhaltende Wirkung des Magnetfeldes. Gemäß
Gleichung (4.49) ergibt sich daraus
~ & Bz ≈ 5,67904 · 10−12 Ts
τp | B|
γs
(4.56)
wobei das gyromagnetische Verhältnis des Elektrons γs ≈ 1,760859 · 1011 /(Ts) verwendet wurde.1 Im hier relevanten Bereich von Bz ist also die Vereinfachung, die Lorentzkraft zu vernachlässigen, nicht mehr gerechtfertigt und es müsste eine genauere Betrachtung unter Einbeziehung
dieser erfolgen um brauchbare Aussagen über die Spinpolarisierung für starke Magnetfelder
treffen zu können.
Auch wenn die Aussage, dass ein äußeres Magnetfeld spinpolarisierend wirken kann, aufgrund der Vernachlässigung der Lorentzkraft nicht ohne Weiteres haltbar ist, konnte doch gezeigt werden, dass unser Modell in gewissen Grenzen auch für ein äußeres magnetisches Feld
analytische exakt gelöst werden kann.
4.6. Einfluss verschiedener Wände
Im letzten Abschnitt haben wir mit einem externen Magnetfeld einen äußeren Effekt, der auf das
Elektronengas wirkt, untersucht. Einen weiteren äußeren Effekt, der die Elektronen beeinflusst,
stellen Wände dar. Diese beschreiben eine weitere Einschränkung der zweidimensionalen Bewegungsfreiheit der Elektronen auf einen bestimmten Bereich in einer Richtung - wir wählen
ohne Beschränkung der Allgemeinheit die y-Richtung - lassen die Elektronen aber in dazu orthogonaler Richtung in ihrer Bewegung unbeeinflusst. Ohne Wände konnten die Elektronen sich
in der xy-Ebene frei bewegen und werden nur von Störstellen oder eventuell einem elektrischen
Feld wie in Gleichung (3.50) beeinflusst. Nun fügen wir dem System zwei Wände parallel zur
x-Richtung im Abstand L hinzu. Im einfachsten Fall nehmen wir die Wände als reflektierend
an. Trifft ein Elektron mit Impuls ~p auf eine der Wände, so wird es daran instantan und elastisch reflektiert, d.h. der zur Wand senkrechte Teil des Impulses ändert sein Vorzeichen und das
Elektron verlässt die Wand mit dem Impuls:
px
~p0 = −py
(4.57)
0
1
http://physics.nist.gov/cgi-bin/cuu/Value?gammae
93
4.6. EINFLUSS VERSCHIEDENER WÄNDE
KAPITEL 4. SPINDYNAMIK
x-Richtung
6
10
y-Richtung
z-Richtung
¥
analytisch (L=
)
Fit
5
Relaxationszeit
10
Axn (User)
Modell
Gleichung
Zeichnen
4
10
A/x^n
y-Richtung
A
2,79905E6 ± 387350,95038
n
1,78809 ± 0,05119
Chi-Quadr Reduziert
0,05117
R-Quadrat(COD)
0,93351
Kor. R-Quadrat
0,9296
3
10
2
10
1
10
100
W andabstand L
Abbildung 4.26.: Relaxationszeit τ der Spinpolarisierung in allen drei Raumrichtungen in Abhängigkeit
vom Wandabstand L mit τp = 1 und a = 0,05
Dabei wird der Impuls 2py auf die Wand übertragen. Da wir die Wände als unbeweglich ansehen,
wird dieser Impuls einfach „verschluckt“. Dieses Bild der Wände entspricht dem Modell von
Kiselev und Kim in [KK00] und wurde bereits im Fachpraktikum ausführlich analysiert.
4.6.1. Reflektierende Wände
Im Folgenden sollen die wichtigsten Resultate der Analyse eines Systems mit Wänden nochmals
kurz aufgezeigt werden, da wir die Betrachtungen im nächsten Abschnitt auf diesen Ergebnissen aufbauen werden. Das in dieser Arbeit verwendete analytische Lösungsverfahren für das
zweidimensionale Elektronengas mit Spin-Bahn-Kopplung stößt bei einem System mit Wänden
an seine Grenzen. Es gibt keine praktikable Möglichkeit, die Reflektion an einer Wand in die
analytischen Rechnungen miteinzubeziehen. Es bleibt also die Monte-Carlo-Simulation, wie sie
auch Kiselev und Kim verwenden, um derartige Systeme zu untersuchen.
Wir hatten im Fachpraktikum recht bald festgestellt, dass Wände die Spinpolarisierungen in
den verschiedenen Raumrichtungen unterschiedlich beeinflussen. In Abbildung 4.26 sind die
Relaxationszeiten von Spinpolarisierungen in allen drei Raumrichtungen in Abhängigkeit vom
Wandabstand L dargestellt. Wie auch schon im Fachpraktikum festgestellt wurde, wirken sich
die Wände in erster Linie auf die Relaxationszeit der Spinpolarisierung in y-Richtung aus. Die
x-Richtung ist von den Wänden nicht beeinflusst und auch für die z-Richtung ergibt sich nur
eine Änderung der Relaxationszeit um einen Faktor ∼ 2. Für die y-Richtung hingegen steigt die
Spinpolarisierung etwa proportional zu L−1,788 . Um so stärker die Wände das Elektronengas in
der y-Richtung einschränken, um so langlebiger wird die Spinpolarisierung, d.h. die Wände wirken spinerhaltend. Diese Beobachtungen sind im wesentlichen konsistent mit den Ergebnissen
von Kiselev und Kim.
Um eine Analyse der spinerhaltenden Wirkung der Wände zu ermöglichen, sind in Abbildung 4.27 die Relaxationszeiten der Spinpolarisierung in y-Richtung für verschiedene Werte
des Wandabstandes L und des Rashba-Parameters a über dem jeweils anderen Parameter aufge-
94
4.6. EINFLUSS VERSCHIEDENER WÄNDE
KAPITEL 4. SPINDYNAMIK
8
8
10
a=0,01
a=0,05
a=0,2
a=1
a=0,02
a=0,1
a=0,5
a=2
L=10
6
y
L=20
L=50
Relaxationszeit
Relaxationszeit
5
5
10
4
10
3
10
L=1
L=2
10
ana.
10
)
L=5
a=10
6
y
analytisch (L=
7
10
a=5
7
10
¥
10
10
L=100
L=200
4
10
L=500
3
10
2
2
10
1
10
10
1
10
0
0
10
10
1
10
100
0,01
W andabstand L
0,1
1
10
Rashba-Parameter a
Abbildung 4.27.: Relaxationszeit τy der Spinpolarisierung in y-Richtung für verschiedene Wandabstände
L und Rashba-Parameter a mit τp = 1
tragen. Man erkennt in beiden Diagrammen, dass die Wände fast ausschließlich spinerhaltend
wirken. Für sehr kleine Wandabstände ergeben sich bei starkem Rashba-Effekt leicht verringerte Relaxationszeiten. Eventuell spielt hier eine Art Resonanzeffekt zwischen den Wänden eine
Rolle, mit dem sich die leicht beschleunigte Spinrelaxation erklären ließe. Wir haben in den
Gleichungen (4.16) und (4.17) auf Seite 59 die komplexen Frequenzen und damit die Relaxationszeit in Abhängigkeit von a berechnet. In den beiden Diagrammen ist die analytische Lösung
in schwarz eingezeichnet. In der analytischen Rechnung hatten wir keine Wände berücksichtigt
- dies entspricht unendlich weit entfernten Wänden, also L = ∞. Abgesehen von den angesprochenen Effekten für sehr starken Rashba-Effekt bildet die analytische Lösung das Minimum der
Relaxationszeiten für vorgegebenes a. Für bestimmt Werte des Rasba-Parameters gibt es einen
kritischen Wert des Wandabstandes. Nur wenn der Wandabstand kleiner als dieser Wert ist, wirken die Wände spinerhaltend. Sind die Wände weiter voneinander entfernt als dieser kritische
Wert, dann beeinflussen sie die Relaxationszeit nicht. Dies ist leicht zu verstehen, wenn man sich
bewusst wird, dass die Wände L/2 von der Ausgangsposition der Elektronen entfernt sind. Für
genügend starken Rashba-Effekt relaxiert die Spinpolarisierung schneller als eine signifikante
Anzahl an Elektronen mit vorgegebener Geschwindigkeit vF die Wände erreicht. Nur wenn die
Spinpolarisierung noch vorhanden ist, wenn die ersten Elektronen auf die Wand treffen, können
die Wände diese Spinpolarisierung auch erhalten.
Im Fachpraktikum und auch von Kiselev und Kim wurde zwar gezeigt, dass die Wände spinerhaltend wirken, der Grund hierfür konnte allerdings nicht ermittelt werden. Eine wasserdichte
Erklärung werden wir auch in dieser Arbeit schuldig bleiben, es kann jedoch eine anschauliche
Begründung geliefert werden. Insbesondere der Fakt, dass die spinerhaltende Wirkung in erster
Linie auf die y-Richtung des Spins wirkt, kann begründet werden. Dazu betrachtet man den Spin
eines einzelnen Elektrons zum Zeitpunkt t = 0 in y-Richtung. Bewegt sich dieses Elektron nun
parallel zur x-Achse, ergibt sich die Rotationsachse des Spins parallel zur y-Achse und der Spin
bleibt unverändert. Nur eine Bewegung mit Anteil in y-Richtung vermag den Spin zu verändern.
Genau dieser Anteil der Bewegung wird aber von den Wänden auf den Bereich [−L/2, L/2] ein-
95
4.6. EINFLUSS VERSCHIEDENER WÄNDE
KAPITEL 4. SPINDYNAMIK
geschränkt. Würde sich das Elektron im Extremfall eindimensional auf der y-Achse bewegen, so
würde die Spinrelaxation, sobald das Elektron eine der Wände erreicht, vollständig unterdrückt,
da es durch seine Bewegung von der Wand weg die Rotation des Spins wieder rückgängig machen würde. Da sich das Elektron aber auch in x-Richtung bewegen kann, wird bei der Bewegung von der Wand weg die Spinpräzession offensichtlich nicht exakt rückgängig gemacht,
und es ergibt sich eine langsamere, aber dennoch vorhandene Spinrelaxation. Dies ist mit der
Beobachtung konsistent, dass die Relaxation einer Spinpolarisierung in x-Richtung nicht unterdrückt wird. Die Bewegung in x-Richtung wird von den Wänden nicht eingeschränkt. Und
auch die z-Richtung lässt sich auf diese Weise erklären: ein Spin in z-Richtung wird durch eine Bewegung in x- oder y-Richtung verändert. Von den Wänden wird die Bewegung in einer
dieser beiden Richtungen eingeschränkt. Naiv formuliert wird also die „Hälfte“ der Spinrelaxation unterdrückt und man erhält die in Abbildung 4.26 erkennbare doppelte Relaxationszeit der
Spinpolarisierung in z-Richtung für kleine Wandabstände.
4.6.2. Adiabatische Wände
Im letzten Abschnitt haben wir reflektierende, also harte Wände betrachtet. Traf ein Elektron auf
eine der Wände, wurde es instantan und elastisch reflektiert. Anschaulich beschrieben wirkt für
einen infinitesimal kleinen Zeitraum eine extrem große Kraft auf das Elektron und beschleunigt
es von der Wand weg. Nun kann man diesen Zeitraum auch als endlich groß annehmen. Damit
wird auch die wirkende Kraft endlich. In dieser Vorstellung wirkt ebenfalls eine Kraft auf das
Elektron, sobald es die Wand berührt. Da die wirkende Kraft endlich ist, ändert die zur Wand
senkrechte Impulskomponente ihr Vorzeichen nicht instantan, sondern sie nimmt langsam ab
und dann in entgegengesetzter Richtung wieder zu. Während dieser Zeit befindet sich das Elektron in der Wand, verhält sich aber, abgesehen von der durch die Wand auf das Elektron wirkenden Kraft, wie ein freies Elektron. Insbesondere behalten die Bewegungsgleichungen (2.27)
bis (2.29) ihre Gültigkeit, womit auch die Spindynamik unverändert bleibt. Die bisher behandelten reflektierenden Wände waren mit massiven materiellen Wänden vergleichbar. Die weichen
Wände, wie wir sie in diesem Abschnitt behandeln, lassen sich eher als an einer bestimmten
Linie einsetzende Kraftfelder vorstellen. Wählt man die wirkende Kraft extrem klein, und damit
den Zeitraum in dem die Kraft wirkt sehr groß, erhält man adiabatische Wände.
Dieses Modell untersuchen Schwab u. a. in [Sch+06]. Im Gegensatz zu unserer analytischen
Beschreibung verwenden sie jedoch quasiklassische Greensche Funktionen. Es soll nicht Ziel
dieses Abschnitts sein, mit den Greenschen Funktionen eine grundlegend andere Herangehensweise an die Problemstellung detailliert herzuleiten. Schwab u. a. leiten mit diesen Greenschen
Funktionen die Diffusionsgleichung für die Problemstellung her. Ausgehend von dieser Diffusi-
96
4.6. EINFLUSS VERSCHIEDENER WÄNDE
KAPITEL 4. SPINDYNAMIK
onsgleichung werden wir die Rechnungen von Schwab u. a. nachvollziehen. Diese lauten:
~2 ρ = 0
∂t − D∇
(4.58a)
~ 2 sx = − 1 sx + 2C∂x sz
(4.58b)
∂t − D∇
τs
~ 2 sy = − 1 sy + 2C∂y sz
(4.58c)
∂t − D∇
τs
~ 2 sz = − 2 sz − 2C∂x sx − 2C∂y sy
∂t − D∇
(4.58d)
τs
Es wurden folgende Konstanten verwendet:
1
D = v2F τp
2
τs =
τp
2(αpF τp )2
C = vF αpF τp
Diese Gleichungen lassen sich umstellen, um die Zeitableitung des Spins zu erhalten, indem
man alle Ortsableitungen nach rechts sortiert. Es überleben dabei nur partielle Ableitungen in
y-Richtung, da die Spinpolarisierung parallel zu den Wänden, also in x-Richtung, homogen und
in z-Richtung auf eine Ebene eingeschränkt ist:
2
D∂y −
∂t ~s =
0
0
1
τs
0
D∂2y −
0
1
τs
−2C∂y
2C∂y
D∂2y
−
2
τs
~s
(4.59)
Da die x-Richtung des Spins unabhängig von den anderen beiden Raumrichtungen ist, können wir uns bei den folgenden Betrachtungen auf die y- und z-Richtung, also die untere rechte
2 × 2-Matrix dieser Gleichung beschränken:
2 1
D∂y −
2C∂
y
τ
s
∂t ~s =
(4.60)
~s
2
−2C∂y D∂2y − τs
Um dieses System linearer gewöhnlicher Differentialgleichungen zu lösen, wählt man den Ansatz
~s(y, t) = ~aeiqy e−λt
(4.61)
wobei q nicht mit der Ladung des Elektrons zu verwechsel ist, und setzt in Gleichung (4.60) ein:
−Dq2 − 1 + λ
2iCq
τs
~a = 0
(4.62)
−2iCq
−Dq2 − τ2s + λ
Somit hat man das Differentialgleichungssystem in ein System herkömmlicher quadratischer
Gleichungen umgewandelt. Dieses herkömmliche Gleichungssystem beschreibt ein Eigenwert-
97
4.6. EINFLUSS VERSCHIEDENER WÄNDE
KAPITEL 4. SPINDYNAMIK
problem und liefert folgende Eigenwerte und Eigenvektoren:
s
4C 2 τs + D(−3 + 2τs λ) ± A
q1,2 = −q3,4 =
2D2 τs
~a1,2
√ √ 2
2iC 2τs 4C τs +D(−3+2τs λ)∓A
D−4C 2 τs ±A
=
1
A=
q
~b1,2
−a1,2
=
1
(4.63)
(4.64)
D2 + 16C 4 τ2s + 8C 2 Dτs (−3 + 2τs λ)
Damit erhält man die allgemeine Lösung des Differentialgleichungssystems (4.60) durch eine
Linearkombination der speziellen Lösungen:
~s(y, t) = e−λt α1~a1 eiq1 y + β1~b1 e−iq1 y + α2~a2 eiq2 y + β2~b2 e−iq2 y
(4.65)
Die Randbedingungen dieser Spinpolarisierung sind durch die Wände gegeben. Für reflektierende Wände sind sie durch die Bedingung, dass es keinen Spinstrom in die Wände geben darf,
definiert:
−D∂y −C
~s = 0
(4.66)
C
−D∂y
Diese Bedingung muss an der Oberfläche beider Wände, also bei y = ±L/2, gelten. Zur Vereinfachung verschiebt man die Wände um L/2. Man wertet also die Randbedingung bei y = 0
und y = L aus, indem man die allgemeine Lösung der Spinpolarisierung (4.65) einsetzt. Für die
Randbedingung an der unteren Wand bei y = 0 erhält man beispielsweise für die obere Zeile in
Gleichung (4.66):
−iD α1 a1,x q1 − β1 b1,x q1 + α2 a2,x q2 − β2 a2,x q2 − C α1 a1,y β1 a1,y α2 a2,y β2 a2,y = 0 (4.67)
Insgesamt erhält man vier dieser Gleichungen, wobei ~a1,2 , ~b1,2 und q1,2 alle von λ abhängen.
Dieses Gleichungssystem lässt sich als Matrix schreiben:
α1
β1
M(λ) = 0
α2
β2
(4.68)
Die Randbedingungen müssen für alle möglichen Spinverteilungen gelten, d.h. für alle möglichen Werte von α1,2 und β1,2 . Den noch fehlenden Parameter λ erhält man also aus der Bedingung:
det M(λ) = 0
(4.69)
98
4.6. EINFLUSS VERSCHIEDENER WÄNDE
10
0
-1
z
Spinpolarisierung <s (y,t)>
10
KAPITEL 4. SPINDYNAMIK
t=0
t=50
t=100
10
t=150
-2
t=200
t=250
10
10
-3
-4
-100
-50
0
50
100
Ort y
Abbildung 4.28.: Ortsabhängige Spinpolarisierung hsz (y, t)i in z-Richtung zu verschiedenen Zeitpunkten
für vF = 1, τp = 1 und a = 0,2
Schon an den Eigenwerten (4.63) und Eigenvektoren (4.64) sieht man, dass die Matrix M(λ)
recht kompliziert ist. λ kommt dabei an einigen verschiedenen Stellen vor und Gleichung (4.69)
ist damit nicht mehr analytisch exakt lösbar. Wir müssen uns mit numerischen Verfahren zur
Nullstellensuche behelfen. Dabei gehen wir recht einfach vor und tasten für vorgegebenen Wandabstand L schlicht die Werte der Determinante in kleinen Schritten von λ ab. Finden wir ein betragsmäßiges Minimum, lassen wir Mathematica die genaue Position der Nullstelle bestimmen.
Man erhält aus diesem Verfahren mehrere Werte für λ, die die Lebensdauer der entsprechenden
Moden beschreiben. Dabei entspricht λ der inversen Relaxationszeit τ.
Möchte man mit diesem Modell adiabatische Wände untersuchen, muss man nur die Randbedingungen ändern. Diese lauten für adiabatische Wände:
1
0
~s = 0
(4.70)
C −D∂y
Alle anderen Überlegungen bleiben gültig und man erhält die Relaxationskonstante λ erneut
durch numerische Nullstellensuche der Determinante in Gleichung (4.69).
Es sollen nun zwei Aussagen von Schwab u. a. mit unserem Modell verglichen werden. Die
erste Aussage betrifft die räumliche Verteilung der Spinpolarisierung in einem System mit Wänden. In Abbildung 1 in [Sch+06] zeigen Schwab u. a., dass die Spinpolarisierung in der Nähe
der Wände signifikant langsamer relaxiert als in der Mitte des Systems. Wir versuchen dieses
Verhalten mit Hilfe der Monte-Carlo-Simulation zu bestätigen und führen die Simulation mit
den von Schwab u. a. verwendeten Parametern durch. Die Ergebnisse sind in Abbildung 4.28 zu
finden. Auch in diesem Fall sind unsere Ergebnisse konsistent mit denen der Literatur. Die Simulation liefert, abgesehen von statistischem Rauschen, genau das gleiche Bild wie es Schwab
u. a. zeigen. Obwohl mit der Diffusionsgleichung (4.60) und unserer quasiklassischen MonteCarlo-Simulation zwei grundlegend verschiedene Herangehensweisen an die Problemstellung
zum Einsatz kamen, erhält man zumindest in diesem ersten Vergleich konsistente Ergebnisse.
99
4.6. EINFLUSS VERSCHIEDENER WÄNDE
KAPITEL 4. SPINDYNAMIK
0,025
0,040
Simulation (Mitte)
Simulation (verteilt)
0,035
analytisch (L=
)
analytisch
0,020
Relaxationskonstante
Relaxationskonstante
0,030
0,015
0,010
0,005
Simulation (Mitte)
analytisch (L=
Simulation (verteilt)
analytisch
0,025
0,020
0,015
0,010
)
0,005
analytisch (dünner Streifen)
0,000
0,000
0
20
40
60
80
100
W andabstand L
0
20
40
60
80
100
W andabstand L
Abbildung 4.29.: Relaxationskonstante λy der Spinpolarisierung in y-Richtung für reflektierende Wände (links) und adiabatische Wände mit g = 0,1 (rechts) mit vF = 1, τp = 1 und a = 0,2
Die zweite Aussage, die wir genauer untersuchen werden, bezieht sich auf die unterschiedliche Wirkung reflektierender und adiabatischer Wände. Im letzten Abschnitt haben wir die
Wirkung reflektierender Wände bereits ausführlich untersucht. Um die Ergebnisse mit denen
von Schwab u. a. zu vergleichen, berechnen wir die Relaxationskonstanten λ in Abhängigkeit
vom Abstand der Wände L mit der oben beschriebenen Methode. Die Ergebnisse sind in Abbildung 4.29 links zu finden. Aus den dargestellten Kurven kann man die Relaxationszeit durch
das Inverse des kleinsten Wertes der Relaxationskonstante λ für ein bestimmtes L ermitteln. Wie
bereits im letzten Abschnitt festgestellt wurde, wirken Wände, die das Elektronengas auf einen
relativ schmalen Streifen einschränken, spinerhaltend. Dies liegt nicht zuletzt an der in Abbildung 4.28 festgestellten langsameren Spinrelaxation in der Nähe dieser Wände. Umso weiter die
Wände voneinander entfernt sind, umso schwächer wird die spinerhaltende Wirkung. Für sehr
große Wandabstände nimmt die Relaxationskonstante den Wert λ ≈ 0,0075 an. Dies entspricht
einer Relaxationszeit von τ ≈ 133 und steht im Widerspruch zu Gleichung (4.19) auf Seite 60
wonach man eine Relaxationszeit von τ ≈ 50 erwarten würde.
Zusätzlich zur analytischen Berechnung wurde erneut eine Simulation mit gleichen Parametern durchgeführt und ebenfalls in das Diagramm eingezeichnet. Die Simulation wurde hier mit
zwei unterschiedlichen Anfangszuständen durchgeführt: für die rote Linie wurde alle Elektronen
zum Zeitpunkt t = 0 im Ursprung, also genau in der Mitte zwischen den zwei Wänden initialisiert. Sie entspricht den Ergebnissen, die auch schon in Abbildung 4.27 abgebildet wurden. Bei
der Simulation, deren Ergebnisse im Diagramm in grün eingezeichnet wurden, wurden die Elektronen zum Zeitpunkt t = 0 zufällig zwischen den Wänden verteilt. Man sieht deutlich, dass hier
die spinerhaltende Wirkung der Wände auch für größere Wandabstände vorhanden ist. Dies war
insofern zu erwarten, als dass nun Elektronen die Wand schon sehr früh erreichen und somit die
Spinpolarisierung nicht schon relaxiert, bevor die ersten Elektronen auf eine Wand treffen. Für
große Wandabstände ergeben sich aber immer noch relativ große Abweichungen von der von
Schwab u. a. vorhergesagten Relaxationszeit. Für kleine Wandabstände passen unsere Simulationsergebnisse dafür sehr gut zu den Werten von Schwab u. a.. Bis ungefähr L . 20 decken sich
100
4.6. EINFLUSS VERSCHIEDENER WÄNDE
KAPITEL 4. SPINDYNAMIK
3
Relaxationszeit
y
10
g=0,1
g=0,3
g=0,12
g=0,5
g=0,15
g=1
g=0,2
g=10
g=0,25
g=100
2
10
0
10
20
30
40
50
W andabstand L
Abbildung 4.30.: Relaxationszeiten τy der Spinpolarisierung in y-Richtung für verschieden harte Wände
mit vF = 1, τp = 1 und a = 0,2
unsere Ergebnisse mit der Kurve, die mit Hilfe der Diffusionsgleichung berechnet wurde. Dabei
passt die Simulation mit Initialisierung der Elektronen im Ursprung sogar noch etwas besser
als die Simulation der zum Zeitpunkt t = 0 zufällig verteilten Elektronen. Schwab u. a. sagen
für sehr kleine Wandabstände eine L−2 -Abhängigkeit der Relaxationszeit voraus. Dies passt auf
den ersten Blick zu unseren Ergebnissen. In Abbildung 4.26 auf Seite 94 hatten wir genau diesen Bereich gefittet und einen Proportionalität zu L−1,788 erhalten. Diese beiden Werte passen
im Rahmen der Genauigkeit der Simulation ungefähr zusammen. In Abbildung 4.29 sieht man
auch, dass für einen Wandabstand im Bereich 10 . L . 20 die Steigung der Relaxationskonstanten flacher als L2 wird. Dies passt ebenfalls zum betragsmäßig kleineren Exponenten der
Abhängigkeit.
In Abbildung 4.29 rechts wurden die gleichen analytischen und numerischen Rechnungen für
adiabatische Randbedingungen durchgeführt. Bei der numerischen Berechnung wurde eine konstante Beschleunigung g = 0,1 in der Wand angenommen. Der Weg der Elektronen wurde dabei
in genügend kleine Stücke zerlegt, um die Spindynamik der gekrümmten Flugbahn zu berechnen. Der Wert von g definiert dabei die „Härte“ der Wand. Ein sehr großer Wert von g steht für
reflektierende Wände und ein sehr kleiner Wert beschreibt adiabatische Wände. Auch in diesem
Bild liegen die Relaxationskonstanten der numerischen Berechnung wieder signifikant über denen der analytischen Berechnung. Viel wichtiger ist aber das Verhalten für kleine Wandabstände:
um so näher die Wände beieinander liegen, um so stärker die Wände also das Elektronengas in
y-Richtung einschränken, um so größer wird die Relaxationskonstante λ, d.h. die Relaxationszeit wird in diesem Fall kleiner. Im Gegensatz zu reflektierenden Wänden scheinen adiabatische
Wände also destruktiv auf die Spinpolarisierung zu wirken. Die Monte-Carlo-Simulation bestätigt dieses Verhalten.
Es soll genauer analysiert werden, welchen Einfluss die Stärke der in der Wand wirkenden
Kraft auf die Spinpolarisierung hat. Dazu wurde die Simulation für verschieden harte Wände und verschiedene Wandabstände durchgeführt. Die Ergebnisse sind in Abbildung 4.30 zu
finden. Man erkennt, dass harte Wände mit mit kleiner Beschleunigung der Elektronen in der
101
4.6. EINFLUSS VERSCHIEDENER WÄNDE
KAPITEL 4. SPINDYNAMIK
Wand g spinerhaltend wirken: die Relaxationszeit steigt mit kleiner werdendem Wandabstand.
Demgegenüber tragen relativ weiche Wände mit kleinem g zur Spinrelaxation bei und die Relaxationszeit sinkt mit dem Wandabstand. Man erhält einen kontinuierlichen Übergang vom einen
zum anderen Fall. Für Werte im mittleren Bereich 0,15 . g . 0,2 ergeben sich Wände, deren
Abstand für die Spinrelaxation fast irrelevant ist. Für sehr harte Wände scheint ab einer Beschleunigung von g ≈ 10 keine weitere Steigerung der polarisierungserhaltenden Wirkung mehr
möglich. Ab diesem Wert kann man die Wand als reflektierend bezeichnen. Für extrem kleine
Wandabstände ergibt sich jedoch eine leichte Abweichung von restlichen Verhalten. Allerdings
hat man es dann auch mit einem derart stark in y-Richtung eingeschränkten Elektronengas zu
tun, dass die Annahme, die Elektronen können sich in der xy-Ebene frei bewegen, nicht mehr
zu halten ist und das quasiklassische Modell seine Gültigkeit verliert. Hier wäre eine genauere
quantenmechanische Analyse nötig.
In diesem Abschnitt konnte das auf Kiselev und Kims Arbeit basierende Modell des zweidimensionalen Elektronengases mit Wänden um ein weiteres Detail ergänzt werden. Es wurden in
Anlehnung an die Arbeit von Schwab u. a. auch adiabatische Wände untersucht. Die in dieser
Arbeit entwickelte analytische Lösungsmethode konnte zwar nicht auf ein System mit Wänden
angewandt werden, dafür wurden die Rechnungen von Schwab u. a. teilweise nachvollzogen.
Mit Hilfe der Monte-Carlo-Simulation wurde die Aussage, dass reflektierende und adiabatische
Wände die Spinrelaxation fundamental verschieden beeinflussen, bestätigt.
102
Kapitel 5:
Zusammenfassung und
Ausblick
KAPITEL 5. ZUSAMMENFASSUNG UND AUSBLICK
5. Zusammenfassung und Ausblick
In dieser Arbeit wurde das zweidimensionale Elektronengas mit Spin-Bahn-Kopplung in verschiedenen Abwandlungen untersucht. Es war dabei keineswegs das Ziel, dieses sehr weit gefasste Thema vollständig zu behandeln, stattdessen sollten selektiv verschiedene Aspekte herausgegriffen werden. Zuerst wurden im ersten Kapitel die physikalischen Grundlagen des verwendeten Modells beschrieben. Dabei wurden die beiden untersuchten Effekte der Spin-BahnWechselwirkung, der Rashba- und der Dresselhaus-Effekt, kurz eingeführt. Ausgehend vom
Hamiltonoperator mit Rashba- und Dresselhaus-Spin-Bahn-Kopplung, sowie externem elektrischen und magnetischen Feld, wurden die quasiklassischen Bewegungsgleichungen der Freiheitsgrade eines freien, d.h. ungestreuten Elektrons hergeleitet. Wechselwirkungen der Elektronen untereinander, sowie eine Wirkung des Spins auf die Bewegung des Elektrons, wurden dabei
nicht berücksichtigt. Es wurde basierend auf einer Arbeit von Kiselev und Kim ein Modell definiert, das diese Elektronen in einem Material beschreibt. Die Vorstellung eines Elektrons, das
gelegentlich an Störstellen gestreut wird, führte uns auf eine exponentialverteilte Flugzeit und,
unter der Annahme konstanter Geschwindigkeit, auch Flugstrecke zwischen zwei Streuungen.
Es wurde dann ein analytischer Lösungsweg beschrieben, um die Spinpolarisierung in einem Elektronengas, das sich nach diesem Modell verhält, zu berechnen. Dieser Lösungsweg
basierte auf einer Integration über alle möglichen Trajektorien, die ein Elektron von einem Ausgangszeitpunkt bis zu einem Zeitpunkt t beschreiben kann. Es wurde also die quasiklassische
Zeitentwicklung der Spinpolarisierung in einem zweidimensionalen Elektronengas mit SpinBahn-Wechselwirkung analytisch beschrieben. Im nächsten Schritt wurde die entwickelte Lösungsmethode erweitert um auch die Ortsabhängigkeit einer Spinpolarisierung zu untersuchen.
Da die analytische Methode im Verlauf der Arbeit nicht immer zum Ziel führen würde, wurde
zusätzlich eine Monte-Carlo-Simulation entworfen, die die Vorgänge im beschriebenen Elektronengas numerisch abbildet.
Im zweiten Kapitel wurden dann dargelegt, wie die Lösungsmethode, die wir zwar in erster
Linie für die Beschreibung einer Spinpolarisierung entwickelt hatten, auch eine Dichteverteilung
und damit die Ladungsdynamik eines Elektronengases beschreiben kann. Dabei wurde zunächst
das Verhalten eines ein- und dann eines zweidimensionalen Elektronengases untersucht. Die Betrachtungen stellten sich im Verlauf dieser Arbeit als auch für die Spindynamik nützlich heraus.
Als Nächstes wurde bei der Analyse der Dichteverteilung ein äußeres elektrisches Feld mit
berücksichtigt. Die Annahme isotroper Streuung wurde aufgegeben und es wurde mit Hilfe der
analytischen Lösungsmethode die Leitfähigkeit eines zweidimensionalen Elektronengases beschrieben. Der erhaltene Ausdruck für die Leitfähigkeit war mit Angaben aus der Literatur konsistent. Außerdem wurden die Forderung elastischer Streuung aufgegeben und die sich dadurch
ergebenden Unterschiede untersucht. Die numerische Simulation wurde zum Vergleich und zur
Überprüfung der analytischen Resultate herangezogen und lieferte konsistente Ergebnisse.
105
KAPITEL 5. ZUSAMMENFASSUNG UND AUSBLICK
Als Nächstes widmeten wir uns der Spindynamik. In Kapitel 4 wurden zuerst der analytische
Lösungsweg auf das zweidimensionale Elektronengas mit Spin-Bahn-Kopplung angewandt. Dabei wurde vorerst nur die Rashba-Spin-Bahn-Wechselwirkung berücksichtigt. Auch hier wurde
die Untersuchung des ein- und zweidimensionalen Elektronengases separat durchgeführt. Da im
zweidimensionalen Fall zunächst keine befriedigenden analytischen Ergebnisse erzielt werden
konnten, wurde dann auf die Zeitauflösung verzichtet und nur die Ortsabhängigkeit der Spinpolarisierung untersucht. Alle Ergebnisse wurden mit denen der numerischen Simulation verglichen und die unterschiedlichen Genauigkeiten betrachtet. Dabei lieferte teilweise die analytische
Lösung und teilweise die Monte-Carlo-Simulation bessere Ergebnisse. Bis auf Ungenauigkeiten
durch Näherungen oder numerische Berechnungen stimmten die Ergebnisse aber perfekt überein.
Bis zu diesem Punkt gingen wir immer davon aus, dass sich zum Anfangszeitpunkt alle Elektronen in Ursprung befinden. Im nächsten Schritt wurde analysiert, wie sich eine initiale Verteilung der Elektronen und damit auch der Spinpolarisierung auf die Relaxation letzterer auswirkt.
Dabei stellten wir fest, dass es wellenförmige Verteilungen gibt, für die die Spinpolarisierung
langsamer relaxiert als für andere.
Da in den Betrachtungen zunächst nur der Rashba-Effekt berücksichtigt wurde, wurde der
nächste Abschnitt der Untersuchung eines zweidimensionalen Elektronengases, in dem neben
dem Rashba-Effekt auch der Dresselhaus-Effekt wirkt, gewidmet. Da die analytische Lösungsmethode versagt, wenn unterschiedlich starke Rashba- und Dresselhaus-Effekte in einem System
vorliegen, wurde hier in erster Linie auf die numerische Simulation und auf Vergleiche mit der
Literatur gesetzt. Wir untersuchten zunächst das Phänomen der persistent spin helix, um dann
die Auswirkungen des Dresselhaus-Effektes auf die Spinpolarisierung zu analysieren. Es wurde festgestellt, dass der lineare Dresselhaus-Effekt zur Erhaltung der Spinpolarisierung beitragen kann, was im extremsten Fall der persistent spin helix zu einer statischen Spinpolarisierung
führte. Das Vorhandensein des kubischen Terms in der Dresselhaus-Spin-Bahn-Wechselwirkung
zerstört diese allerdings wieder, indem es erneut eine Spinrelaxation verursacht.
Der nächste Abschnitt befasste sich mit einem anderen Aspekt des Modells: es wurde - wie
schon bei der Betrachtung der Ladungsdynamik - die Annahme isotroper Streuung aufgegeben.
Im Gegensatz zu den Betrachtungen der Ladungsdynamik, konnte hier aber keine beliebige Anisotropie berücksichtigt werden. Stattdessen wurde eine spezielle p-Wellen Anisotropie gewählt,
für die sich die analytischen Berechnungen durchführen ließen. Es wurde beobachtet, dass die
Anisotropie für Spinrelaxation in verschiedenen Raumrichtungen grundlegend anders wirkt. Für
Spinpolarisierungen in der Ebene der Bewegung führte eine bevorzuge Rückwärtsstreuung zu
einer länger anhaltenden Spinpolarisierung - für eine Spinpolarisierung senkrecht zur Ebene der
Bewegung war das Verhalten jedoch genau umgekehrt.
Im nächsten Schritt wurde ein äußeres Magnetfeldes senkrecht zur Bewegungsrichtung in die
Analyse mit einbezogen und dessen Einfluss auf die Spinpolarisierung untersucht. Dabei wurde
eine spinerhaltende Wirkung großer Magnetfelder gefunden. Es stellte sich jedoch heraus, dass
die benötigte Magnetfeldstärke im Widerspruch zu vorher gemachten Annahmen stand, womit
den Ergebnissen nur bedingt vertraut werden konnte.
Die Betrachtung der Spindynamik wurde mit einer Analyse verschiedenartiger Wände abgeschlossen. Dabei wurde konsistent mit einer Arbeit von Schwab u. a. festgestellt, dass verschiedene Wände grundlegend andere Auswirkungen auf die Spinrelaxation haben: reflektierende
106
KAPITEL 5. ZUSAMMENFASSUNG UND AUSBLICK
Wände wirkten auf eine Spinpolarisierung senkrecht zu den Wänden spinerhaltend, wohingegen
adiabatische Wände die Spinrelaxation beschleunigten.
Es wurden an keinem Punkt der Arbeit unerklärbare Abweichungen zwischen den analytischen Ergebnissen und denen der Monte-Carlo-Simulation festgestellt. In fast allen Betrachtungen stimmten die Ergebnisse im Rahmen numerischer Ungenauigkeiten perfekt überein. Dies
spricht für die Korrektheit beider Beschreibungen.
Es ist nicht einfach einen Ausblick auf konkrete weiterführende Forschungen im Bereich
der Spindynamik eines Elektronengases zu geben. Dies liegt keinesfalls am Mangel an Möglichkeiten, sondern schlicht an der schieren Fülle dergleichen. In dieser Arbeit wurde in einer Art Rundumschlag auf verschiedenste Aspekte des zweidimensionalen Elektronengases mit
Spin-Bahn-Wechselwirkung eingegangen. Man könnte zu jedem dieser Aspekte ganze Arbeiten
schreiben. Es gibt aber zwei Phänomene, die in dieser Arbeit nicht behandelt wurden, die aber
noch erwähnt werden müssen: der Spin-Hall-Effekt und der Edelstein-Effekt. Dabei beschreibt
der Spin-Hall-Effekt das Auftreten eines Spinstromes im Elektronengas beim Vorhandensein eines äußeren elektrischen Feldes. Ein elektrisches Feld haben wir hier im Zusammenhang mit der
Spindynamik bisher nicht analysiert. Demgegenüber bezeichnet der Edelstein-Effekt das Ausbilden einer Spinpolarisierung als Folge eines angelegten elektrischen Feldes. Diese und andere
Effekte konnten in dieser Arbeit nicht mehr untersucht werden und es wäre zu klären, ob und
inwiefern das hier beschriebene quasiklassische Modell auch diese Effekte erklären kann. Ein
weiterer Punkt der Klärung bedarf, ist die Gültigkeit des Modells für echte Materialien. Es wurden in dieser Arbeit verschiedene Methoden zur Beschreibung des Modells verwendet, die alle
übereinstimmende Ergebnisse lieferten. Es wurden jedoch keinerlei Vergleiche mit realen Experimenten gezogen. Ohne den Vergleich mit experimentellen Ergebnisse bleiben unsere Resultate
vorerst nur Voraussagen über ein theoretisches Modell.
107
Anhang
ANHANG A. ANHANG
A. Anhang
A.1. Herleitung der Bewegungsgleichungen
Man erhält durch Einsetzen des Hamiltonoperators (2.3) in das EhrenfestTheorem (2.18) die zeitliche Ableitung des Impulserwartungswertes:
#+
iE i *" p̂2
d
i Dh
γs ˆ ~
ˆ
~
Ĥ, p̂i =
+ ĤR + ĤD − qE · ~r − ~s · B, p̂i
(A.1)
h p̂i i =
dt
~
~ 2m
~
ĤR = α σx p̂y − σy p̂x
ĤD = β σx p̂x − σy p̂y + γ −σx p̂x p̂2y + σy p̂y p̂2x
Impulsoperator:
h
i h
i
Mit Verwendung der Kommutatoren p̂2 , p̂i = p̂ j , p̂i = 0 bleibt nur der Summand des elektrischen Feldes übrig:
iE
iq X Dh
d
E j r̂ j , p̂i
h p̂i i = −
dt
~ j
(A.2)
h
i
Einsetzen des Kommutators r̂ j , p̂i = i~δ j,i liefert die Bewegungsgleichung:
d
h p̂i i = qEi
dt
In vektorieller Schreibweise lässt sich dies ausdrücken als:
d D ˆE
~p = qE~
dt
(A.3)
(A.4)
Analog ergibt sich aus dem Hamiltonoperator und dem Ehrenfest-Theorem die
zeitliche Ableitung des Ortserwartungswertes:
#+
iE i *" p̂2
d
i Dh
γ
s
ˆ
ˆ
~ r̂i
Ĥ, r̂i =
+ ĤR + ĤD − qE~ · ~r − ~s · B,
(A.5)
hr̂i i =
dt
~
~ 2m
~
h
i
h
i
Die Kommutatoren r̂ j , r̂i = ŝ j , r̂i = 0 sorgen dafür, dass die Summanden des elektrischen
und magnetischen Feldes verschwinden. Wir werden uns nun die verbleibenden Summanden
der Reihe nach vornehmen. Für den Kommutator des Impulsquadrates und der Ortskoordinate
erhält man:
X
i h
i
h
i X h
p̂2 , r̂i =
p̂ j p̂ j , r̂i + p̂ j , r̂i p̂ j =
− p̂ j i~δ j,i − i~δ j,i p̂ j = −2i~ p̂i
(A.6)
Ortsoperator:
j
j
111
A.1. HERLEITUNG DER BEWEGUNGSGLEICHUNGEN
ANHANG A. ANHANG
Der Kommutator des Rashba-Termes mit der Ortskoordinate liefert:
h
i
σx p̂y − σy p̂x , r̂i = − hσx i i~δ2,i + hσy i i~δ1,i
(A.7)
Der lineare Term des Dresselhaus-Effekts liefert ein ähnliches Ergebnis:
h
i
σx p̂x − σy p̂y , r̂i = − hσx i i~δ1,i + hσy i i~δ2,i
(A.8)
Dagegen liefert kubische Term folgendes Resultat:
h
i
h
i h
i h
i h
i −σx p̂x p̂2y + σy p̂y p̂2x , r̂i = −σx p̂x p̂2y , r̂i + p̂x , r̂i p̂2y + σy p̂y p̂2x , r̂i + p̂y , r̂i p̂2x =
(A.9)
= i~σx 2 p̂x p̂y δ2,i + δ1,i p̂2y − i~σy 2 p̂y p̂x δ1,i + δ2,i p̂2x
Zusammengefasst lässt sich dies in vektorieller Schreibweise teilweise vereinfachen und durch
ein Kreuzprodukt ausdrücken:
− h ŝy i
h ŝx i
− h ŝx i h p̂y i2 + 2 h ŝy i h p̂y i h p̂x i
2β
2α
d D ˆE
− h ŝy i − 2γ −2 h ŝx i h p̂x i h p̂y i + h ŝy i h p̂x i2 =
~r =
−
h ŝx i −
~
dt
m
~
~
0
0
0
D E
β − γ h p̂y i2
2γ h p̂x i h p̂y i 0
ˆ~p
D E 2
D E
2a
− ~ez × ~sˆ − −2γ h p̂x i h p̂y i −β + γ h p̂x i2 0 ~sˆ
=
m
~
~
0
0
0
D E
~pˆ
(A.10)
Wie zuvor erhält man mit dem Hamiltonoperator und dem Ehrenfest-Theorem
die zeitliche Ableitung des Spinerwartungswertes:
#+
iE i *" p̂2
d
i Dh
ˆ
ˆ
~
~
Ĥ, ŝi =
+ ĤR + ĤD − qE · ~r − γs ~s · B, σi
(A.11)
h ŝi i =
dt
~
2 2m
h
i
h
i
h
i
Die Kommutatoren p̂2 , σi = p̂ j , σi = r̂ j , σi = 0 sorgen dafür, dass die Summanden der
kinetischen Energie und des elektrischen Feldes verschwinden. Unter Verwendung des KommuP
tators [σk , σi ] = 2i j k,i, j σ j erhält für den Rashba-Term:
X
h
i h
i
h
i
σx p̂y − σy p̂x , σi = σx , σi p̂y − σy , σi p̂x = 2i
1,i, j σ j p̂y − 2,i, j σ j p̂x =
j
(A.12)
= 2i δ2,i σz − δ3,i σy p̂y − δ3,i σx − δ1,i σz p̂x
Spinoperator:
Der lineare Term des Dresselhaus-Effekts liefert analog:
h
i
σx p̂x − σy p̂y , σi = 2i δ2,i σz − δ3,i σy p̂x − δ3,i σx − δ1,i σz p̂y
(A.13)
Der kubische Term liefert hier ein analoges Ergebnis:
h
i
−σx p̂x p̂2y + σy p̂y p̂2x , σi = −2i δ2,i σz − δ3,i σy p̂x p̂2y − δ3,i σx − δ1,i σz p̂y p̂2x
(A.14)
112
A.2. FAKTOR τP IM ZEITENTWICKLUNGSOPERATOR
ANHANG A. ANHANG
Für das magnetische Feld erhält man:
X
h
i X
~ σi =
~ · B,
[σk , σi ] Bk = 2i
i,k, j σ j Bk
σ
(A.15)
j,k
k
Fasst man diese vier Terme zusammen ergibt sich in vektorieller Schreibweise:
!
!
−hσz ih p̂y ih p̂x i2
hσz ih p̂x i
hσz ih p̂y i
d D ˆE
2
hσz ih p̂x i
−
hσz ih p̂y i
−hσz ih p̂x ih p̂y i
~s = −α
−β
− γ
−hσy ih p̂y i−hσx ih p̂x i
−hσy ih p̂x i−hσx ih p̂y i
dt
hσy ih p̂x ih p̂y i2 +hσx ih p̂y ih p̂x i2
−β + γ h p̂y i2
0
0
2α D E
D E
D E
2
~ × ~sˆ =
~pˆ × ~ez +
=
0
β − γ h p̂x i2 0 ~pˆ − γs B
~
~
0
0
0
{z
} | {z }
| {z } |
~D
=: ω
~R
=: ω
~R + ω
~D + ω
~B
= ω
γs ~ ~
2 B×
D E
~ˆ =
σ
~B
=: ω
D E
× ~sˆ
(A.16)
A.2. Faktor τp im Zeitentwicklungsoperator
In den in dieser Arbeit verwendeten Zeitentwicklungsoperatoren taucht der Faktor τp auf. Hier
soll kurz geklärt werden, wie dieser zustande kommt. Um die Zeitentwicklung der Spinpolarisierung eines Elektronengases mit Streuungen an Störstellen zu beschreiben betrachten wir in
Gleichung (2.44) zuerst die Zeitentwicklung Un (t) bei bestimmter Anzahl n − 1 an Streuungen
und summieren dann in Gleichung (2.48) über alle möglichen n, also von 1 bis ∞. Dabei sind
nicht alle Anzahlen von Streuungen gleich wahrscheinlich: es ist beispielsweise sehr unwahrscheinlich, dass ein Elektron in einem kleinen Zeitraum sehr oft gestreuut wird. Ebenso ist es
unwahrscheinlich, dass ein Elektron in einem großen Zeitraum nur sehr wenige male gestreut
wird. Die Wahrscheinlichkeit, dass ein Elektron in Zeitraum t genau n − 1 mal gestreut wird, ist
in Un (t) bereits berücksichtigt und durch
wn (t) =
Z∞
dt1 p(t1 ) . . .
0
Z∞
dtn p(tn ) δ(t − t1 . . . − tn ) = . . .
(A.17)
0
gegeben. Dies lässt sich, indem man die Fouriertransformation der Deltafunktion verwendent,
schreiben als:
∞
n
!n
Z∞
Z∞
Z
dω −iωt
dω −iωt
1
iωt
1
dt1 p(t1 )e =
... =
e
e
(A.18)
2π
2π
1 − iτp ω
−∞
−∞
0
Nun kann mit den Polstellen n-ter Ordnung bei
ω1 = −
113
i
τp
(A.19)
A.2. FAKTOR τP IM ZEITENTWICKLUNGSOPERATOR
ANHANG A. ANHANG
der Residuensatz zur Lösung des ω-Integrals verwendet werden:
!n
1
−iωt
wn (t) = −i Resω1 e
=
1 − iτp ω
1
∂n−1
i
limω→ω1 n−1 e−iωt (ω − ω1 )n
=−
(n − 1)!
1 − iτp ω
∂ω
!n
t
i
i
−
(−it)n−1 e τp
=
=−
(n − 1)!
τp
n−1
!n
=
(A.20)
t
1 τp
− t
=
e τp
τp (n − 1)!
| {z }
Poissonverteilung
Wir haben also für die Wahrscheinlichkeitsverteilung wn (t) eine Poissonverteilung mit dem Faktor 1/τp erhalten. Dies passt zu unserer Vorstellung, dass sowohl extrem wenige als auch extrem
viele Streuungen in einem bestimmten Zeitraum t unwahrscheinlich sind. Da die Summe über
die Poissonverteilung von n = 1 bis ∞ natürlicherweise auf 1 normiert ist, müssen wir in der
Summe über die Zeitentwicklungen für n−1 Streuunungen Un (t) den Faktor 1/τp wieder herausrechnen. Man erhält die korrekte Zeitentwicklung indem man die Summe mit τp multipliziert:
U(t) = τp
∞
X
n=1
114
Un (t)
(A.21)
Literatur
[AS65]
M. Abramowitz und I. A. Stegun, Hrsg. Handbook of mathematical functions with
formulas, graphs, and mathematical tables. New York: Dover, 1965. isbn: 0-48661272-4. url: http://opac.inria.fr/record=b1099202.
[Dre55]
G. Dresselhaus. „Spin-Orbit Coupling Effects in Zinc Blende Structures“. In: Phys.
Rev. 100 (2 Okt. 1955), S. 580–586. doi: 10.1103/PhysRev.100.580.
[Eck88]
U. Eckern. Transporttheorie. 3. Aufl. Skriptum zur Vorlesung. Lehrstuhl für Theoretische Physik II. Universität Augsburg, 1988. url: http: //myweb .rz. uniaugsburg.de/~eckern/archiv/skripten/tr-script.pdf.
[Fit06]
R. Fitzpatrick. Fields due to a moving charge. 2006. url: http://farside.ph.
utexas.edu/teaching/em/lectures/node125.html.
[GS22]
W. Gerlach und O. Stern. „Der experimentelle Nachweis der Richtungsquantelung
im Magnetfeld“. In: Zeitschrift für Physik 9.1 (1922), S. 349–352. issn: 0044-3328.
doi: 10.1007/BF01326983.
[Kan98]
B. E. Kane. „A silicon-based nuclear spin quantum computer“. In: Nature 393.6681
(Mai 1998), S. 133–137. issn: 0028-0836. doi: 10.1038/30156.
[KK00]
A. A. Kiselev und K. W. Kim. „Progressive suppression of spin relaxation in twodimensional channels of finite width“. In: Phys. Rev. B 61 (19 Mai 2000), S. 13115–
13120. doi: 10.1103/PhysRevB.61.13115.
[Lec12]
V. Lechner. „Bulk and Structure Inversion Asymmetry in Semiconductor Quantum
Well Structures“. Diss. Universität Regensburg, Mai 2012. url: http://epub.
uni-regensburg.de/25885/1/Lechner_thesis.pdf.
[Man+15]
A. Manchon u. a. „New perspectives for Rashba spin-orbit coupling“. In: Nature
Materials 14 (Sep. 2015), S. 871–882. doi: 10.1038/nmat4360.
[OY07]
M. Ohno und K. Yoh. „Vanishing of inhomogeneous spin relaxation in InAs-based
field-effect transistor structures“. In: Phys. Rev. B 75 (24 Juni 2007), S. 241308.
doi: 10.1103/PhysRevB.75.241308.
[OY08]
M. Ohno und K. Yoh. „Time-resolved and space-resolved Monte-Carlo analyses on
spin relaxation anisotropy in InAs heterostructure“. In: Physica E: Low-dimensional
Systems and Nanostructures 40.5 (2008), S. 1539–1541. issn: 1386-9477. doi: 10.
1016/j.physe.2007.09.094.
[Pau25]
W. Pauli. „Über den Zusammenhang des Abschlusses der Elektronengruppen im
Atom mit der Komplexstruktur der Spektren“. In: Zeitschrift für Physik 31.1 (1925),
S. 765–783. issn: 0044-3328. doi: 10.1007/BF02980631.
115
Literatur
Literatur
[PS10]
Y. V. Pershin und V. A. Slipko. „Radial spin helix in two-dimensional electron
systems with Rashba spin-orbit coupling“. In: Phys. Rev. B 82 (12 Sep. 2010),
S. 125325. doi: 10.1103/PhysRevB.82.125325.
[PZ99]
P. Pfeffer und W. Zawadzki. „Spin splitting of conduction subbands in III-V heterostructures due to inversion asymmetry“. In: Phys. Rev. B 59 (8 Feb. 1999),
R5312–R5315. doi: 10.1103/PhysRevB.59.R5312.
[Rai+06]
R. Raimondi u. a. „Quasiclassical approach to the spin Hall effect in the two-dimensional
electron gas“. In: Phys. Rev. B 74 (3 Juli 2006), S. 035340. doi: 10.1103/PhysRevB.
74.035340.
[Rei03]
A. Reisenegger. „Origin and evolution of neutron star magnetic fields“. In: ArXiv
Astrophysics e-prints (Juli 2003). arXiv: astro-ph/0307133 [astro-ph].
[RS59]
E. I. Rashba und V. I. Sheka. „Symmetry of Energy Bands in Crystals of Wurtzite Type. II. Symmetry of Bands with Spin-Orbit Interaction Included“. Russisch.
In: Fizika Tverdogo Tela: Collected Papers 2 (1959), S. 162–176. url: http :
//iopscience.iop.org/1367- 2630/17/5/050202/media/njp050202_
suppdata.pdf.
[San+12]
M. T. Sandoval u. a. „Rashba and Dresselhaus spin-orbit interaction strength in
GaAs/GaAlAs heterojunctions“. In: Physics Procedia 28 (2012), S. 95–98. issn:
1875-3892. doi: 10.1016/j.phpro.2012.03.678.
[Sch+06]
P. Schwab u. a. „Spin relaxation in narrow wires of a two-dimensional electron
gas“. In: Phys. Rev. B 74 (15 Okt. 2006), S. 155316. doi: 10.1103/PhysRevB.74.
155316.
[Sin+15]
J. Sinova u. a. „Spin Hall effects“. In: Rev. Mod. Phys. 87 (4 Okt. 2015), S. 1213–
1260. doi: 10.1103/RevModPhys.87.1213. url: http://link.aps.org/doi/
10.1103/RevModPhys.87.1213.
[Wil+02]
Z. Wilamowski u. a. „Evidence and evaluation of the Bychkov-Rashba effect in
SiGe/Si/SiGe quantum wells“. In: Phys. Rev. B 66 (19 Nov. 2002), S. 195315. doi:
10.1103/PhysRevB.66.195315.
[YOL10]
L. Yang, J. Orenstein und D.-H. Lee. „Random walk approach to spin dynamics in
a two-dimensional electron gas with spin-orbit coupling“. In: Phys. Rev. B 82 (15
Okt. 2010), S. 155324. doi: 10.1103/PhysRevB.82.155324.
116