Physik – Grundwissen: Mechanik
Werbung

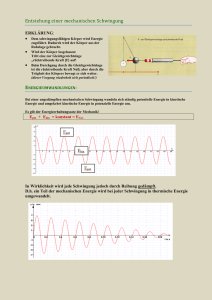
3.3.2009 - EK Physik: Grundwissen Mechanik Kinematik Gleichförmig geradlinige Bewegung: v = const, x = vt + x0 (x0 ,v0 ... Anfangsbedingungen) Gleichmäßig beschleunigte Bewegung: a = const, v = at + v0, x = ½at2 + v0 t + x0 v v d v v v v d ⎛ d v⎞ Geschwindigkeit und Beschleunigung (in 3d): v = r& ≡ r , a = v& = &r& ≡ ⎜ r ⎟ , dt dt ⎝ dt ⎠ v wobei r = (x(t ), y(t ), z (t ) ) eine Parametrisierung der Bahnkurve ist. Kreisbewegung (Radius r, Geschwindigkeit v): Zentripetalbeschleunigung a ⊥ = v 2 / r Dynamik v v v v d v 2. Newton’sches Gesetz (Bewegungsgl.): ma = ∑ F (oder allg.: p& = mv = ∑ F ) dt v v m v p = Impuls: ... In abgeschlossenen Systemen gilt Impulserhaltung. v v Kräfte: Gravitationskraft: FG = GMm / r 2 (anziehend, G = 6.67 ⋅ 10 −11 m 3 kg −1 s −2 ) v v v Schwerkraft: FG = mg mit g = (0,0,− g ) und daher g = GM E / rE2 v v Federkraft: F = − kΔx („rücktreibende Kraft”) v v Energie, Arbeit: E = ∫ F ⋅ ds ... In abgeschlossenen Systemen gilt Energieerhaltung. v v Kinetische Energie: E = 12 mv 2 Federenergie: E = 12 kΔx 2 Potentielle Energie im Schwerefeld der Masse M: E = −GMm / r Näherung auf der Erdoberfläche (“homogenes Schwerefeld“): E = mgh v v Leistung (momentan): P = dW / dt = F ⋅ v Durchschnittsleistung: P = W / t hier wird meist W für ‘work’ (Arbeit) verwendet __________ Elastischer Stoß (1-dimensional) zweier Massen m1 und m2, wobei m2 anfangs ruht: 2m1 m − m2 v1 , und von m1: v1′ = 1 Geschwindigkeit von m2 nach dem Stoß: v 2′ = v1 m1 + m2 m1 + m2 Schwerpunkt (rS): bewegt sich mit konstanter Geschwindigkeit, falls keine äußeren Kräfte n v v auf das System einwirken. Für ein System von n Punktmassen: m ges rS = ∑i =1 mi ri Reibungskräfte bei Festkörpern: FHaft ,max = μ H FN , FGleit = μ G FN , FRoll = μ R FN Reibungskräfte in Flüssigkeiten und Gasen: FR = bv n (wirken entgegen der Bewegungsrichtung) (n = 1 für laminare Strömung, n = 2 für turbulente Strömung) Scheinkräfte (Corioliskraft, …): treten ‘scheinbar’ in Nicht-Inertialsystemen auf. Unterscheide: Volumskräfte (z.B. Gravitation) und Kontaktkräfte bzw. Druck (Kraft/Fläche) Drehbewegungen Ersetzungsregeln: v r →ϕ v v v →ω m→I Winkel Winkelgeschwindigkeit Trägheitsmoment Σmr2 Die wichtigsten dynamischen Größen für Translation und Drehbewegung sind einander in folgender Tabelle gegenübergestellt: Ort Translation v r v dr Wegelement Geschwindigkeit Beschleunigung Masse Impuls Bewegungsgleichung: Kraft = Impulsänderung (in Klammer: für konstante Masse) kinetische Energie Arbeit Leistung v r dr v= dt r v r dv d 2 r a= = 2 dt dt m r r p = mv r dpr F= dt r r ( F = ma ) 1 Ekin = mv 2 2r v dW = F ⋅ ds r r P = F ⋅v Winkel Winkelelement Drehbewegung ϕ dϕ Winkelgeschwindigkeit r v dϕ = d ϕ e N r r dϕ ω= dt *) r r dω d 2ϕ = 2 α= Winkelbeschleunigung dt dt I = ∑i mi ri 2 Massenträgheitsmoment r r Drehimpuls L = Iω r Bewegungsgleichung: r dL M = Drehmoment = dt r Drehimpulsänderung r (in Klammer: für konstantes ( M = Iα ) Massenträgheitsmoment) 1 E kin = Iω 2 kinetische Energie 2 r r dW = M ⋅ dϕ Arbeit r r Leistung P = M ⋅ω r r *) e N = Einheitsvektor in Richtung der Drehachse (d.h. ⊥ auf die Ebene der Drehbewegung) r r r r Skalarprodukt a ⋅ b = a ⋅ b cos α Schwingungen (spezielle Dynamik: rücktreibende Kraft ∝ Auslenkung) Harmonische Schwingung: x = A sin(ωt + ϕ ) , mit Amplitude A, Kreisfrequenz ω, Phase ϕ ω = 2π f , Frequenz f , Periodendauer T = 1 / f (= Zeit für eine komplette Schwingung) Feder: ω = k / m T = 2π m / k k = Federkonstante Pendel: ω = g / l T = 2π l / g l = Länge des Pendels Gedämpfte Schwingung: Amplitude nimmt exponentiell ab: A(t ) = A0 e − βt Erzwungene Schwingung: Resonanzkurve, Phasenbeziehung zw. Auslenkung und Erreger Resonanz: wenn die Anregung ungefähr mit der Frequenz der freien Schwingung erfolgt Schwebung = Überlagerung zweier Schwingungen mit ähnlichen Frequenzen: f1 ≈ f 2 Wellen (sind korrelierte Schwingungen an verschiedenen Raumpunkten) Longitudinale + transversale Wellen, stehende + laufende Wellen, ebene W. + Kugelwellen ∂ 2 f ( x, t ) 1 ∂ 2 f ( x, t ) Wellengleichung in 1-er Dimension: = 2 (analog zu „F = ma“) c ∂x 2 ∂t 2 x t Lösung: y = A sin( kx − ωt ) , Wellenzahl k = 2π/λ, λ = Wellenlänge: y = A sin[ 2π ( − )] λ T (Phasen-)Geschwindigkeit: x/t = vϕ = λ f = ω/k, Gruppengeschwindigkeit vg = dω/dk zwei oder mehrere Wellen: Superposition und Interferenz (konstruktiv, destruktiv) Reflexion von Wellen: am festen bzw. am losen Ende Brechung von Wellen: eindimensional und mehrdimensional