§ 36 Topologische Räume sowie Stetigkeit und Konvergenz von
Werbung

§ 36
Topologische Räume sowie Stetigkeit und
Konvergenz von Funktionen in topologischen Räumen
36.1
36.3
36.4
36.6
36.11
36.13
Topologischer Raum und offene Mengen
Die Teilraumtopologie TD eines topologischen Raumes
Umgebungen und Nachbarschaften
Hausdorff-Raum
Stetigkeit
Charakterisierung der Stetigkeit mittels offener bzw. abgeschlossener
Mengen
Kompositionen stetiger Abbildungen sind stetig
Kompaktheitstreue stetiger Abbildungen
Umkehrfunktionen stetiger Funktionen
Innere Punkte, Berührungspunkte und Randpunkte
Das Innere, der Abschluß und der Rand einer Menge
Zusammenhang
Stetige Bilder zusammenhängender Mengen sind zusammenhängend
Zusammenhangskomponenten
Wegzusammenhang
Inverser Weg und Summe von Wegen
Wegzusammenhang von Mengen, die durch Polygonzüge verbindbar
sind
Die von einem Mengensystem erzeugte Topologie
Produkttopologie über X1 × . . . × Xn
Pseudometrisierbarkeit und Metrisierbarkeit
b ist metrisierbar
Die Topologie Tb von R
Konvergenz von Funktionen
36.14
36.18
36.20
36.23
36.24
36.29
36.34
36.36
36.39
36.44
36.48
36.52
36.53
36.60
36.62
36.63
C1
[36]–1
Kapitel VIII
Normierte, metrische und topologische Räume
Der Begriff des metrischen Raumes ist 1906 von Fréchet eingeführt worden.
Der allgemeine Begriff des topologischen Raumes sowie die wichtigsten Grundbegriffe der mengentheoretischen Topologie stammen von Hausdorff aus dem
Jahre 1914. Die mengentheoretische Topologie behandelt alles das, was sich
allgemein über Begriffe wie Nähe, Nachbarschaft, Konvergenz und Stetigkeit
aussagen läßt. So kann man unter dem Begriff Konvergenz einer Folge bzgl.
einer Topologie so verschiedene Konvergenzen subsumieren wie
Konvergenz einer Zahlenfolge; lokal-gleichmäßige Konvergenz von Funktionenfolgen; punktweise Konvergenz von Funktionenfolgen.
Man gelangt zum Begriff des topologischen Raumes, indem man die für die
offenen Mengen eines pseudometrischen Raumes T (d) geltenden Eigenschaften
axiomatisch fordert und die Erzeugung mittels einer Pseudometrik vergißt.
36.1
Topologischer Raum und offene Mengen
Sei X eine nicht-leere Menge und T ein System von Teilmengen von X.
Das Paar (X, T ) heißt ein topologischer Raum, falls gilt:
∅, X ∈ T ;
(i)
O 1 , O2 ∈ T ⇒ O 1 ∩ O 2 ∈ T ;
(ii)
Oλ ∈ T für λ ∈ Λ ⇒ ∪λ∈Λ Oλ ∈ T .
(iii)
Man nennt T eine Topologie über X und die Elemente von T die offenen
Mengen (der Topologie).
Nach (i) sind ∅ und X stets offene Mengen. Nach (ii) bzw. (iii) sind endliche Durchschnitte offener Mengen und beliebige Vereinigungen offener Mengen
wieder offene Mengen.
Betrachtet man mehrere Topologien T , so spricht man auch genauer von den
T -offenen Mengen oder den offenen Mengen bzgl. T oder bzgl. (X, T ).
36.2
Beispiele
(i) Sei (X, d) ein pseudometrischer Raum. Dann ist (X, T (d)) ein topologischer Raum im Sinne von 36.1. Die offenen Mengen dieser Topologie sind
also genau die in 33.12(i) mit Hilfe der Pseudometrik d eingeführten offenen
Mengen. Insbesondere sind also T = {∅, X} und T = P(X) Topologien
für X (siehe 33.19, 33.8). Dies läßt sich natürlich auch direkt nachprüfen.
Wir erhalten also im Sinne von links nach rechts zunehmender Allgemeinheit:
Normierte
Räume
⊂
⊂
Pseudonormierte
Räume
⊂
Pseudometrische
Räume
Metrische Räume
⊂ Topologische
Räume
⊂
Insbesondere ist also R mit dem Betrag als Norm ein normierter und somit
topologischer Raum.
[36]–2
C1
Topologische Räume, Stetigkeit und Konvergenz von Funktionen
b mit Tb . Dann ist (R,
b Tb ) ein topologischer Raum.
Betrachte R
Ist ∅ 6= D ⊂ R, so erhalten wir mit TD = {O ∩ D : O ∈ T } den
topologischen Raum (D, TD ) (siehe 14.13).
(iv) In Verallgemeinerung von (iii) liefert für jeden pseudometrischen Raum
(X, d) und ∅ 6= D ⊂ X das Paar (D, T (dD )), wobei T (dD ) = {O ∩ D :
O ∈ T (d)} war, einen topologischen Raum (siehe 33.41).
Als Verallgemeinerung wiederum von 33.41 erhalten wir (mit gleichem Beweis
wie in 14.13):
(ii)
(iii)
36.3
Die Teilraumtopologie TD eines topologischen Raumes
Sei (X, T ) ein topologischer Raum und ∅ 6= D ⊂ X. Setze
TD := {O ∩ D : O ∈ T }.
Dann ist (D, TD ) ein topologischer Raum. TD heißt die Teilraumtopologie
von D. Die Mengen von TD heißen auch die in D offenen Mengen.
Beweis. (1) Wegen ∅, X ∈ T gilt: ∅ = ∅ ∩ D und D = X ∩ D gehören zu TD .
(2) Seien O1 , O2 ∈ TD . Dann sind O1 , O2 ∈ T mit O1 = O1 ∩ D und O2 =
O2 ∩ D. Da O1 ∩ O2 ∈ T ist, folgt O1 ∩ O2 = (O1 ∩ O2 ) ∩ D ∈ TD .
(3) Sei Oλ ∈ TD für λ ∈ Λ. Dann gibt es Oλ ∈ T mit Oλ = Oλ ∩ D. Da
∪λ∈Λ Oλ ∈ T ist, folgt ∪λ∈Λ Oλ = (∪λ∈Λ Oλ ) ∩ D ∈ TD .
. offen in X
offen in D
X
D
Satz 33.41 besagt also: Ist (X, d) ein pseudometrischer Raum und betrachtet
man für ∅ 6= D die von der Pseudometrik dD des Teilraumes D erzeugte Topologie T (dD ), so ist dieses die Teilraumtopologie (T (d))D im Sinne von 36.3.
b als auch in pseudometrischen Räumen haben wir den Begriff der
Sowohl in R
Umgebung eines Punktes mittels
Tp = {O ∈ T : p ∈ O} (siehe 33.13 bzw. 13.4(vi))
eingeführt. Dies läßt sich unmittelbar auf die topologische Situation verallgemeinern, genauso wie der Begriff der Konvergenz einer Folge (pn ) gegen p, der
definiert werden konnte durch: In jeder Umgebung von p liegen fast alle pn
(siehe 33.21 und 13.7(ii)).
C1
[36]–3
Kapitel VIII
36.4
Normierte, metrische und topologische Räume
Umgebungen und Nachbarschaften
Sei (X, T ) ein topologischer Raum.
(i)
O heißt Umgebung von p, wenn p ∈ O und O offen ist, d.h. wenn
O ∈ Tp := {O ∈ T : p ∈ O} ist.
(ii) N heißt Nachbarschaft von p, wenn es ein O ∈ Tp mit O ⊂ N gibt.
Die von uns als Umgebung von p bezeichneten Mengen werden üblicher als
offene Umgebungen von p bezeichnet. Unsere Nachbarschaften von p heißen in
den meisten Lehrbüchern dann Umgebungen von p.
Ist (X, T ) ein topologischer Raum und p ∈ D, so nennt man:
O0 Umgebung von p in D, wenn O0 eine Umgebung von p bzgl. der Teilraumtopologie TD ist. Dies ist nach 36.3 genau dann der Fall, wenn O0 = O ∩ D
mit p ∈ O ∈ T ist.
Die Umgebungen O0 von p bzgl. D sind also genau die Durchschnitte von
Umgebungen von p in X mit D.
36.5
Konvergenz von Folgen in topologischen Räumen
Sei (X, T ) ein topologischer Raum und (pn )n≥m eine Folge in X sowie
p ∈ X. Man sagt: (pn ) konvergiert oder strebt gegen p (bzgl. T ), wenn
in jeder Umgebung von p fast alle pn liegen.
b hatten wir festgestellt, daß es zu je zwei verschiedenen Punkten p
In R und R
und q disjunkte Umgebungen gibt (siehe 5.10 und 13.5). Topologische Räume,
die diese Eigenschaft besitzen, heißen Hausdorff-Räume oder hausdorffsch.
36.6
Hausdorff-Räume
Sei (X, T ) ein topologischer Raum. Dann heißt (X, T ) hausdorffsch oder
ein Hausdorff-Raum, wenn es zu zwei verschiedenen Punkten p, q von
X eine Umgebung O(p) von p und eine Umgebung O(q) von q gibt mit
O(p) ∩ O(q) = ∅.
Der folgende Satz zeigt, daß unter den pseudometrischen Räumen genau die
metrischen hausdorffsch sind. Dabei verläuft der Beweis dafür, daß metrische
Räume hausdorffsch sind, wie in 5.10.
36.7
Metrische Räume sind hausdorffsch
Sei (X, d) ein pseudometrischer Raum. Dann gilt:
(X, T (d)) ist hausdorffsch ⇐⇒ d ist eine Metrik.
[36]–4
C1
Topologische Räume, Stetigkeit und Konvergenz von Funktionen
Beweis. ⇒“ Seien p, q ∈ X mit p 6= q. Es ist d(p, q) > 0 zu zeigen. Dann
”
gibt es O(p) ∈ Tp , O(q) ∈ Tq mit O(p) ∩ O(q) = ∅. Nach Definition gibt es dann
ε1 , ε2 ∈ R+ mit Uε1 (p) ⊂ O(p) und Uε2 (q) ⊂ O(q). Somit ist Uε1 (p)∩Uε2 (q) = ∅,
d.h. insbesondere q 6∈ Uε1 (p), also d(p, q) ≥ ε1 .
⇐“ Sei p 6= q, dann ist ε := d(p,q)
> 0, da d eine Metrik ist. Nach 33.14
2
”
sind Uε (p) ∈ Tp und Uε (q) ∈ Tq mit Uε (p) ∩ Uε (q) = ∅; gäbe es nämlich ein
r ∈ Uε (p) ∩ Uε (q), dann wäre d(p, r) < ε, d(q, r) < ε, also 2ε = d(p, q) ≤
d(p, r) + d(r, q) < 2ε.
36.8
Grenzwerte von Folgen in Hausdorff-Räumen sind eindeutig
Sei (X, T ) ein Hausdorff-Raum. Konvergiert die Folge (pn ) gegen p und
q, so ist p = q.
Beweis. Angenommen, es ist p 6= q. Dann gibt es ein O(p) ∈ Tp und O(q) ∈
T (q) mit O(p) ∩ O(q) = ∅, da (X, T ) hausdorffsch ist. Es liegen fast alle (pn )
in O(p) und fast alle (pn ) in O(q). Somit liegen fast alle (pn ) in O(p) ∩ O(q).
Dieses widerspricht O(p) ∩ O(q) = ∅.
Wie in pseudometrischen Räumen definieren wir abgeschlossene, kompakte und
folgenkompakte Mengen (siehe 33.12(ii), 33.28 und 33.25).
36.9
Abgeschlossene, kompakte und folgenkompakte Mengen
Sei (X, T ) ein topologischer Raum und M eine Teilmenge von X. Dann
heißt
(i) M abgeschlossen, wenn X \ M offen ist.
(ii) M folgenkompakt, wenn es zu jeder Folge (pn )n∈N in M eine gegen
ein Element von M konvergierende Teilfolge gibt.
(iii) M kompakt, wenn es zu jeder offenen Überdeckung von M eine
endliche Teilüberdeckung gibt, d.h. wenn gilt:
Ist Oλ , λ ∈ Λ, ein beliebiges System von offenen Mengen
mit M ⊂ ∪λ∈Λ Oλ , dann gibt es eine endliche Teilmenge Λ0
von Λ mit M ⊂ ∪λ∈Λ0 Oλ .
Man nennt auch (X, T ) einen kompakten (folgenkompakten) Raum, wenn (X, T )
ein topologischer Raum ist und die Teilmenge M := X von X kompakt (folgenkompakt) ist.
Aus der Definition der Abgeschlossenheit folgt wegen 36.1(i)—(iii):
(i)
(ii)
(iii)
∅, X sind abgeschlossen;
A1 , A2 abgeschlossen ⇒ A1 ∪ A2 abgeschlossen;
Aλ , λ ∈ Λ abgeschlossen ⇒ ∩λ∈Λ Aλ abgeschlossen.
Wegen M = X \(X \M ) ist ein M genau dann offen, wenn X \M abgeschlossen
ist.
C1
[36]–5
Kapitel VIII
Normierte, metrische und topologische Räume
Im Gegensatz zu pseudometrischen Räumen, sind in allgemeinen topologischen
Räumen Kompaktheit und Folgenkompaktheit nicht äquivalent. Im allgemeinen folgt also aus der Kompaktheit weder die Folgenkompaktheit noch aus der
Folgenkompaktheit die Kompaktheit. Beispiele hierzu sind nicht einfach, man
findet sie jedoch in jedem Buch über mengentheoretische Topologie.
36.10 Abgeschlossenheit von einpunktigen Mengen in Hausdorff-Räumen
Sei (X, T ) ein Hausdorff-Raum. Dann ist {p} abgeschlossen für jedes
p ∈ X.
Beweis. Sei p ∈ X. Es ist zu zeigen (siehe Definition 36.9(i)):
(1)
X \ {p} ist offen.
Sei nun q ∈ X \ {p}. Dann existieren, weil (X, T ) hausdorffsch ist, O(q) ∈ Tq
und O(p) ∈ Tp mit
(2)
O(q) ∩ O(p) = ∅.
Wegen q ∈ O(q), p ∈ O(p) gilt:
(3)
q ∈ O(q) ⊂ X \ O(p) ⊂ X \ {p}.
(2)
Also ist
X \ {p} ⊂ ∪q∈X\{p} O(q) ⊂ X \ {p}.
Somit ist X \ {p} Vereinigung der offenen Mengen O(q), q ∈ X \ {p}, also offen
nach 36.1(iii).
Als Definitionsmöglichkeit für die Stetigkeit in einem Punkt wählt man 33.34(iii)
für beliebige topologische Räume. 33.34(ii) ist in beliebigen topologischen Räumen nicht formulierbar, 33.34(i) folgt auch in beliebigen topologischen Räumen aus 33.34(iii), die Umkehrung (d.h. 33.34(i) ⇒ 33.34(iii)) gilt in beliebigen
topologischen Räumen i.a. aber nicht.
36.11 Stetigkeit
Seien (X1 , T1 ) und (X2 , T2 ) topologische Räume. Sei f : X1 → X2 eine
Abbildung und p0 ∈ X1 .
Dann heißt f T1 , T2 -stetig in p0 , wenn es für jede Umgebung U2 vonf (p0 )
eine Umgebung U1 von p0 gibt mit
f (U1 ) ⊂ U2 .
f heißt T1 , T2 -stetig, wenn f in jedem Punkt p0 von X1 stetig ist.
Besteht über die zugrundeliegenden Topologien kein Zweifel, so spricht man von
der Stetigkeit vonf in p0 bzw. der Stetigkeit von f.
Entsprechend werden wir auch manchmal einfach vom topologischen Raum X
reden anstatt vom topologischen Raum (X, T ). Generell läßt man den Bezug
auf T oder T1 und T2 weg, wenn es sich von selbst versteht.
[36]–6
C1
Topologische Räume, Stetigkeit und Konvergenz von Funktionen
36.12 Beispiele
(i)
(ii)
Seien (X1 , T1 ) und (X2 , T2 ) topologische Räume und f : X1 → X2 die
konstante Abbildung vom Wert q ∈ X2 . Dann ist f T1 , T2 -stetig: Denn
ist p ∈ X1 und U2 eine Umgebung von f (p) = q, dann ist U1 := X1 ∈ Tp
mit f (U1 ) = {q} ⊂ U2 .
Ist T1 = P(X1 ), so ist, bei beliebiger Topologie T2 , jede Abbildung f :
X1 → X2 T1 , T2 -stetig. Wähle zur Umgebung U2 von f (p) als Umgebung
U1 von p die Menge {p}. Dies ist wegen {p} ∈ T1 möglich.
(iii) Ist T2 = {∅, X2 }, so ist, bei beliebiger Topologie T1 , jede Abbildung
f : X1 → X2 T1 , T2 -stetig. Als einzige Umgebung U2 von f (p) ist nur X2
vorhanden. Daher gilt für jede Umgebung U1 von p f (U1 ) ⊂ U2 (= X2 ).
Ist f nur auf einer Teilmenge D von X1 definiert, so nennt man f in p0 stetig,
wenn f (T1 )D , T2 -stetig in p0 ist, d.h. wenn gilt (siehe die Definitionen 36.11
und 36.3):
p0 ∈ D und für jede Umgebung U2 von f (p0 ) gibt es eine Umgebung U1 von
p0 (in X1 ) mit f (U1 ∩ D) ⊂ U2 .
Für die Stetigkeit einer Abbildung f : X1 → X2 erhalten wir folgendes Kriterium (siehe auch 14.13):
36.13 Charakterisierung der Stetigkeit mittels offener bzw.
abgeschlossener Mengen
Seien (X1 , T1 ) und (X2 , T2 ) topologische Räume. Sei f : X1 → X2 eine
Abbildung. Dann sind äquivalent:
(i)
f ist T1 , T2 -stetig.
(ii)
Für jede offene Menge O2 von X2 ist f −1 (O2 ) eine offene Menge
von X1 . Formaler aufgeschrieben:
(iii)
f −1 (O2 ) ∈ T1 für jedes O2 ∈ T2 .
Für jede abgeschlossene Menge A2 von X2 ist f −1 (A2 ) eine abgeschlossene Teilmenge von X1 .
Beweis. (i) ⇒(ii) Sei O2 ∈ T2 . Da f stetig ist, existiert für jeden Punkt
p ∈ f −1 (O2 ) ein O(p) ∈ (T1 )p mit
(1)
Daher ist:
f (O(p)) ⊂ O2 , d.h. O(p) ⊂ f −1 (O2 ).
f −1 (O2 ) = ∪p∈f −1 (O2 ) O(p)
(1)
als Vereinigung von in X1 offenen Mengen in X1 offen.
(ii)⇒(i) Sei p ∈ X1 und U2 ∈ (T2 )f (p) . Dann gilt p ∈ f −1 (U2 ) ∈ T1 , also ist
U1 := f −1 (U2 ) eine Umgebung von p mit f (U1 ) = f (f −1 (U2 )) ⊂ U2 . Also ist f
stetig in p.
C1
[36]–7
Kapitel VIII
Normierte, metrische und topologische Räume
(ii)⇒(iii) Sei A2 abgeschlossen. Dann ist X2 \ A2 ∈ T2 und somit f −1 (X2 \
A2 ) ∈ T1 . Wegen f −1 (X2 \ A2 ) = f −1 (X2 ) \ f −1 (A2 ) = X1 \ f −1 (A2 ) ist also
f −1 (A2 ) abgeschlossen.
(iii)⇒(ii) Sei O2 ∈ T2 . Dann ist X2 \ O2 eine abgeschlossene Teilmenge von
X2 und somit ist f −1 (X2 \ O2 ) eine abgeschlossene Teilmenge von X1 . Wegen
f −1 (X2 \ O2 ) = X1 \ f −1 (O2 ) ist daher f −1 (O2 ) ∈ T1 .
36.14 Kompositionen stetiger Abbildungen sind stetig
Seien (X1 , T1 ), (X2 , T2 ), (X3 , T3 ) topologische Räume. Seien
f : X1 → X2
T1 , T2 -stetig in p0 ,
Dann ist g ◦ f T1 , T3 -stetig in p0 .
g : X2 → X3
T2 , T3 -stetig in f (p0 ).
Beweis. Sei U3 ∈ (T3 )g(f (p0 )) . Dann existiert wegen der Stetigkeit von g in
f (p0 ) ein U2 ∈ (T2 )f (p0 ) mit g(U2 ) ⊂ U3 . Wegen der Stetigkeit von f in p0 gibt
es dann ein U1 ∈ (T1 )p0 mit f (U1 ) ⊂ U2 . Also folgt (g ◦ f )(U1 ) = g(f (U1 )) ⊂
g(U2 ) ⊂ U3 , d.h. g ◦ f ist in p0 stetig.
36.15 Stetigkeit ist eine lokale Eigenschaft
Seien (X1 , T1 ) und (X2 , T2 ) topologische Räume sowie E ⊂ X1 , p0 ∈ E
und f : X1 → X2 . Dann gilt:
(i)
Ist f T1 , T2 -stetig in p0 , so ist f |E : E → X2 (T1 )E , T2 -stetig in p0 .
(ii) Ist E eine Umgebung von p0 und f |E : E → X2 (T1 )E , T2 -stetig in
p0 , so ist f T1 , T2 -stetig in p0 .
Beweis. (i) Sei U2 ∈ (T2 )f (p0 ) . Dann gibt es, da f in p0 stetig ist, ein
U1 ∈ (T1 )p0 mit f (U1 ) ⊂ U2 . Somit ist erst recht f (U1 ∩ E) ⊂ U2 . Da U1 ∩ E
eine Umgebung von p0 in E ist (d.h. U1 ∩ E ∈ (T1 )E mit p0 ∈ U1 ∩ E), folgt
wegen (f |E)(U1 ∩ E) = f (U1 ∩ E) ⊂ U2 , daß f |E in p0 stetig ist.
(ii) Sei U2 ∈ (T2 )f (p0 ) . Dann gibt es, da f |E in p0 stetig ist, eine Umgebung
U10 in E von p0 mit (f |E)(U10 ) ⊂ U2 . Nun ist U10 = U1 ∩ E für eine Umgebung
U1 von p0 in X1 . Da E ∈ T1 und U1 ∈ T1 ist, ist U10 = U1 ∩ E ∈ T1 und es gilt
f (U10 ) = (f |E)(U10 ) ⊂ U2 . Wegen p0 ∈ U10 ist f in p0 stetig.
Aus dem folgenden Satz ergibt sich eine vielfach anwendbare Folgerung:
f : X1 → X2 ist in p0 stetig ⇐⇒ f : X1 → f (X1 ) ist in p0 stetig;
hierbei sei f (X1 ) mit der Teilraumtopologie bzgl. X2 versehen.
36.16 Satz
Seien (X1 , T1 ) und (X2 , T2 ) topologische Räume sowie T ⊂ X2 . Sei
f : X1 → X2 eine Abbildung mit f (X1 ) ⊂ T . Dann gilt:
f : X1 → X2 ist T1 , T2 -stetig in p0 ⇐⇒ f : X1 → T ist T1 , (T2 )T -stetig in p0 .
[36]–8
C1
Topologische Räume, Stetigkeit und Konvergenz von Funktionen
Beweis. ⇒“ Sei U20 eine Umgebung von f (p0 ) in T . Dann gilt U20 = U2 ∩ T
”
mit U2 ∈ T2 . Da f : X1 → X2 T1 , T2 -stetig in p0 ist, gibt es ein U1 ∈ (T1 )p0 mit
f (U1 ) ⊂ U2 . Wegen f (X1 ) ⊂ T gilt auch f (U1 ) ⊂ U2 ∩T = U20 , d.h. f : X1 → T
ist T1 , (T2 )T -stetig in p0 .
⇐“ Sei U2 eine Umgebung von f (p0 ) in X2 . Dann ist U20 := U2 ∩ T eine
”
Umgebung von f (p0 ) in T. Also gibt es ein U1 ∈ (T1 )p0 mit f (U1 ) ⊂ U20 ⊂ U2 ,
d.h. f : X1 → X2 ist T1 , T2 -stetig in p0 .
36.17 Zusammenhang zwischen abgeschlossenen und kompakten Mengen
Sei (X, T ) ein topologischer Raum. Dann gilt für A, K ⊂ X:
(i)
(ii)
(K kompakt und A ⊂ K abgeschlossen) ⇒ A kompakt.
(X hausdorffsch und K ⊂ X kompakt) ⇒ K abgeschlossen.
Beweis. (i) Seien Oλ , λ ∈ Λ, offene Mengen mit A ⊂ ∪λ∈Λ Oλ . Dann gilt
K ⊂ (X \ A) ∪ ∪λ∈Λ Oλ mit offener Menge X \ A. Da K kompakt ist, folgt:
K ⊂ (X \ A) ∪ ∪λ∈Λ0 Oλ mit Λ0 ⊂ Λ endlich.
Also gilt wegen A ⊂ K und A ∩ (X \ A) = ∅:
A ⊂ ∪λ∈Λ0 Oλ mit Λ0 ⊂ Λ endlich,
d.h. A ist kompakt.
(ii) Zu zeigen ist, X \ K ist offen: Es reicht hierzu zu zeigen,
(∀p ∈ X \ K)(∃U (p) ∈ Tp ) mit U (p) ⊂ X \ K.
(1)
Aus (1) folgt dann wegen p ∈ U (p) nämlich, daß
X \ K = ∪p∈X\K U (p)
als Vereinigung der offenen Mengen U (p) offen ist.
Zu (1): Sei p ∈ X \ K beliebig, aber fest. Da (X, T ) hausdorffsch ist, gibt es
zu jedem q ∈ K Mengen V (q) ∈ Tp und W (q) ∈ Tq mit
V (q) ∩ W (q) = ∅.
(2)
W (q), q ∈ K bilden eine offene Überdeckung von K. Da K kompakt ist, existieren daher endlich viele q1 , . . . , qr ∈ K mit
K ⊂ ∪ri=1 W (qi ).
(3)
Nun gilt für U (p) := ∩ri=1 V (qi ) ∈ Tp ,
K ∩ U (p) ⊂ (∪ri=1 W (qi )) ∩ U (p) ⊂ ∪ri=1 (W (qi ) ∩ U (p))
(3)
⊂ ∪ri=1 (W (qi ) ∩ V (qi )) = ∅;
(2)
somit gilt (1).
C1
[36]–9
Kapitel VIII
Normierte, metrische und topologische Räume
36.18 Kompaktheitstreue stetiger Abbildungen
Seien (X1 , T1 ), (X2 , T2 ) topologische Räume, und sei f : X1 → X2 stetig.
Dann gilt:
K1 ⊂ X1 kompakt ⇒ f (K1 ) kompakt.
Beweis. Sei K1 kompakt und Oλ , λ ∈ Λ, eine offene Überdeckung von f (K1 );
d.h.
(1)
f (K1 ) ⊂ ∪λ∈Λ Oλ , Oλ ∈ T2 .
Da f stetig und Oλ ∈ T2 sind, gilt f −1 (Oλ ) ∈ T1 (siehe 36.13). Nun ist
K1 ⊂ f −1 (f (K1 )) ⊂ f −1 (∪λ∈Λ Oλ ) = ∪λ∈Λ f −1 (Oλ ),
(1)
f −1 (O
also ist
λ ), λ ∈ Λ, eine offene Überdeckung von K1 . Wegen der Kompaktheit von K1 existiert eine endliche Teilmenge Λ0 von Λ mit K1 ⊂ ∪λ∈Λ0 f −1 (Oλ )
= f −1 (∪λ∈Λ0 Oλ ). Somit ist f (K1 ) ⊂ ∪λ∈Λ0 Oλ , also gibt es eine endliche Teilüberdeckung von Oλ , λ ∈ Λ, die f (K1 ) überdeckt, d.h. f (K1 ) ist kompakt.
Als Korollar zu diesem Satz erhalten wir eine Verallgemeinerung des Extremalsatzes von Weierstraß (siehe 15.1).
36.19 Extremalsatz von Weierstraß
Sei (X, T ) ein kompakter topologischer Raum, und sei f : X → R stetig.
Dann besitzt f eine Minimal- und Maximalstelle, d.h.:
Es gibt pmin , pmax ∈ X mit f (pmin ) ≤ f (p) ≤ f (pmax ) für alle p ∈ X.
Beweis. f (X) ist nach 36.18 kompakt und als Teilmenge von R somit folgenkompakt. Die Behauptung folgt nun aus 8.12, da jede folgenkompakte Teilmenge von R ein Minimum und Maximum besitzt.
Als Verallgemeinerung des Satzes 15.6 über Umkehrfunktionen stetiger Funktionen erhalten wir mit Hilfe von Satz 36.18:
36.20 Umkehrfunktionen stetiger Funktionen
Es sei (X1 , T1 ) ein kompakter und (X2 , T2 ) ein Hausdorff-Raum. Es sei
f : X1 → X2 eine bijektive und stetige Abbildung. Dann gilt:
f −1 : X2 → X1 ist stetig.
Beweis. Bezeichne die Umkehrabbildung von f mit g. Dann ist zu zeigen
(siehe 36.13):
(1)
Ist A abgeschlossen in X1 , so ist g −1 (A) abgeschlossen in X2 .
Ist A abgeschlossen in X1 , so ist, da X1 kompakt ist, auch A kompakt (siehe
36.17(i)). Also ist f (A) kompakt (siehe 36.18) und daher als kompakte Teilmenge eines Hausdorff-Raumes auch abgeschlossen (siehe 36.17(ii)). (1) folgt
nun aus f (A) = g −1 (A).
[36]–10
C1
Topologische Räume, Stetigkeit und Konvergenz von Funktionen
Bevor wir zeigen, daß beide Voraussetzungen des Satzes 36.20, also Kompaktheit für X1 und Hausdorff-Eigenschaft für X2 , unentbehrlich für die Gültigkeit
des Satzes sind, soll auf den Zusammenhang der Begriffe kompakte Teilmenge
und kompakter Raum und auf ähnliche Fragen eingegangen werden.
36.21 Abgeschlossenheit, Kompaktheit und Folgenkompaktheit bzgl. der Teilraumtopologie
Sei (X, T ) ein topologischer Raum und ∅ 6= D ⊂ X. Dann gilt für Mengen
C, K ⊂ D:
(i)
C ist abgeschlossen bzgl. der Teilraumtopologie TD
⇐⇒ C = A ∩ D für eine bzgl. T abgeschlossene Menge A.
(ii) K ist kompakt bzgl. der Teilraumtopologie TD
⇐⇒ K ist bzgl. T kompakt.
(iii) K ist folgenkompakt bzgl. der Teilraumtopologie TD
⇐⇒ K ist bzgl. T folgenkompakt.
Beweis. (i) Da O ∩ D, O ∈ T , die offenen Mengen des Teilraumes D sind,
sind D \ (O ∩ D) = (X \ O) ∩ D, O ∈ T , die Mengen, die abgeschlossen bzgl.
der Teilraumtopologie sind.
(ii) ⇒“ Seien Oλ ∈ T , λ ∈ Λ und K ⊂ ∪λ∈Λ Oλ . Dann gilt K ⊂ ∪λ∈Λ (Oλ ∩D)
”
mit Oλ ∩ D ∈ TD . Da K kompakt bzgl. TD ist, gibt es eine endliche Teilmenge
Λ0 von Λ mit K ⊂ ∪λ∈Λ0 (Oλ ∩ D) ⊂ ∪λ∈Λ0 Oλ . Also ist K bzgl. T kompakt.
⇐“ Sei K ⊂ ∪λ∈Λ Oλ0 mit Oλ0 ∈ TD . Dann gibt es Oλ ∈ T mit Oλ0 = Oλ ∧ D.
”
Wegen K ⊂ ∪λ∈Λ Oλ und der Kompaktheit von K bzgl. T gibt es eine endliche
Teilmenge Λ0 von Λ mit K ⊂ ∪λ∈Λ0 Oλ . Also ist K ⊂ ∪λ∈Λ0 (Oλ ∩ D) =
∪λ∈Λ0 Oλ0 , d.h. K ist kompakt bzgl. TD .
(iii) ⇒“ Sei (pn )n∈N eine Folge in K. Dann gibt es, da K folgenkompakt bzgl.
”
TD ist eine Teilfolge (pϕ(n) ), die gegen ein Element p0 ∈ K bzgl. der Topologie
TD konvergiert. Also konvergiert (pϕ(n) )n∈N auch bzgl. der Topologie T gegen
p0 ∈ K.
⇐“ Sei (pn )n∈N eine Folge in K. Dann gibt es, da K folgenkompakt bzgl. T
”
ist, eine Teilfolge (pϕ(n) ), die gegen ein Element p0 ∈ K bzgl. der Topologie
T konvergiert. Also konvergiert (pϕ(n) )n∈N auch bzgl. der Topologie TD gegen
p0 ∈ K, da die Umgebungen von p0 bzgl. TD die Gestalt O ∩ D mit O ∈ Tp0
haben, und alle pn und p nach Voraussetzung in D liegen.
Man beachte, daß sich die Begriffe offen bzw. abgeschlossen einerseits und kompakt bzw. folgenkompakt andererseits sich bzgl. der Teilraumtopologie sehr verschieden verhalten:
• Während O ∩ D TD -offen für alle T -offenen Mengen O und A ∩ D TD -abgeschlossen für alle T -abgeschlossenen Mengen D ist, gilt entsprechendes
nicht mehr für T -kompakte bzw. T -folgenkompakte Mengen K (wähle z.B.
X := R, K := [0, 1] und D := ]0, 1[).
C1
[36]–11
Kapitel VIII
Normierte, metrische und topologische Räume
• Während TD -kompakte bzw. folgenkompakte Teilmengen von D stets T -kompakt bzw. T -folgenkompakt sind, gilt entsprechendes nicht für offene bzw.
abgeschlossene Mengen. So ist D stets TD -offen und TD -abgeschlossen, in
der Regel aber weder T -offen noch T -abgeschlossen (wähle z.B. X := R,
D := ]0, 1]).
36.22
Beispiele, die zeigen, daß in Satz 36.20 weder auf die Kompaktheit von X1 , noch auf die Hausdorff-Eigenschaft von X2
verzichtet werden kann
(i) Versieht man X1 := [a, b] mit der Teilraumtopologie von R, so ist X1 ein
kompakter Raum (siehe 36.21(ii)). Versieht man X2 := [a, b] mit der Topologie
T2 = {∅, [a, b]}, so ist die identische Abbildung T1 , T2 -stetig, die Umkehrabbildung, d.h. die identische Abbildung, ist aber nicht T2 , T1 -stetig. Auf die
Hausdorff-Eigenschaft von X2 kann in 36.20 also i.a. nicht verzichtet werden.
(ii) Versieht man X1 := [a, b] mit der Topologie T1 := P(X1 ) und X2 := [a, b]
mit T2 , wobei T2 die Teilraumtopologie von R ist, so ist die identische Abbildung
T1 , T2 -stetig, aber nicht T2 , T1 -stetig. Auf die Kompaktheitsvoraussetzung von
X1 kann also i.a. nicht verzichtet werden.
(iii) Das folgende Beispiel zeigt, daß auch bzgl. üblicher“ Topologien auf X1
”
nicht auf die Kompaktheitsvoraussetzung verzichtet werden kann.
Sei X1 := [0, 2π[ versehen mit der Teilraumtopologie von R. Dann ist f (t) :=
(cos(t), sin(t)), t ∈ [0, 2π[ eine bijektive und stetige Abbildung auf die kompakte
Menge X2 := {p ∈ R2 : kpk2 = 1} (⊂ R2 ) (für die Bijektivität siehe 22.5).
f −1 ist aber nicht stetig, weil sonst [0, 2π[ kompakt sein müßte (siehe 36.18).
Insbesondere ist also i.a. die Umkehrfunktion einer stetigen injektiven Abbildung eines Intervalls I in den Rn (für n ≥ 2) nicht stetig, falls I nicht ein
Intervall der Form [a, b] ist.
Wir führen nun in topologischen Räumen, genau wie in pseudometrischen Räumen (siehe 33.15), die Begriffe innerer Punkt und Berührungspunkt einer Menge
b ordnet sich
ein. Der in 16.1 eingeführte Begriff des Berührungspunktes in R
ebenfalls dieser Definition unter (siehe 16.1(i)).
36.23 Innere Punkte, Berührungspunkte und Randpunkte
Seien (X, T ) ein topologischer Raum und D ⊂ X. Dann heißt:
(i)
p innerer Punkt von D ⇐⇒ O ⊂ D für eine Umgebung O von p.
(ii) p Berührungspunkt von D ⇐⇒ D ∩ O 6= ∅ für jede Umgebung O
von p.
(iii) p Randpunkt von D ⇐⇒ p Berührungspunkt von D und Berührungspunkt von X \ D.
P ist also Berührungspunkt von D, wenn jede Umgebung von p einen Punkt
von D enthält.
p ist Randpunkt von D, wenn jede Umgebung von p einen Punkt von D enthält
und einen anderen Punkt, der nicht zu D gehört.
[36]–12
C1
Topologische Räume, Stetigkeit und Konvergenz von Funktionen
36.24 Das Innere, der Abschluß und der Rand einer Menge
Seien (X, T ) ein topologischer Raum und D ⊂ X. Dann bezeichnet man
mit
(i)
D◦ := {p ∈ X : p ist innerer Punkt von D} und nennt D◦ das
Innere von D.
(ii)
D := {p ∈ X : p ist Berührungspunkt von D} und nennt D den
Abschluß oder die abgeschlossene Hülle von D.
(iii)
∂D := {p ∈ X : p ist Randpunkt von D} und nennt ∂D den
Rand von D.
Schon in 19.3 war gezeigt worden, daß das Innere eines Intervalls immer ein
Intervall ist. Ferner galt [a, b]◦ =]a, b]◦ = [a, b[◦ =]a, b[◦ =]a, b[.
Unmittelbar aus den Definitionen in 36.24 folgt:
36.25 Eigenschaften des Inneren, des Abschlusses und des Randes einer Menge
Seien (X, T ) ein topologischer Raum und D ⊂ X. Dann gilt:
(i)
D ist offen ⇐⇒ D = D◦ ⇐⇒ jeder Punkt von D ist innerer
Punkt von D.
(ii)
D ist abgeschlossen ⇐⇒ D = D ⇐⇒ jeder Berührungspunkt von
D gehört zu D.
(iii)
D◦ ist die größte in D enthaltene offene Menge.
(iv)
D ist die kleinste D enthaltende abgeschlossene Menge.
(v)
Der Rand von D ist abgeschlossen und gleich dem Rand von
X \ D.
(vi)
(vii)
D = D ∪ ∂D = D◦ ∪ ∂D.
(X \D)◦ = X \D; X \ D = X \D◦ ; ∂D = D∩(X \ D) = D\D◦ .
Beweis. (i) Da D◦ ⊂ D für jede Menge D gilt, ist D = D◦ äquivalent zu
D ⊂ D◦ , d.h. jeder Punkt von D ist innerer Punkt von D.
Zu zeigen bleibt: D ist offen ⇐⇒ jeder Punkt von D ist innerer Punkt von D.
⇒“ Ist D offen, so gilt für jeden Punkt p ∈ D, D ist eine Umgebung von p mit
”
D ⊂ D, d.h. p ist innerer Punkt.
⇐“ Für jeden Punkt p ∈ D gibt es ein O(p) ∈ T (p) mit O(p) ⊂ D. Dann ist
”
D = ∪p∈D O(p) eine offene Menge.
(ii) Da jeder Punkt von D ein Berührungspunkt von D ist, ist die letzte
Äquivalenz wieder trivial. Zu zeigen bleibt: D ist abgeschlossen ⇐⇒ jeder
Berührungspunkt von D gehört zu D.
C1
[36]–13
Kapitel VIII
Normierte, metrische und topologische Räume
Jeder Berührungspunkt von D gehört zu D
⇐⇒ (D ∩ O 6= ∅ für jedes O ∈ T (p) ⇒ p ∈ D)
36.23(ii)
⇐⇒ (p ∈ X \ D ⇒ (D ∩ O(p) = ∅ für ein O(p) ∈ Tp )
⇐⇒ jeder Punkt von X \ D ist innerer Punkt von X \ D
⇐⇒ X \ D ist offen ⇐⇒ D ist abgeschlossen.
(i)
(iii) (siehe auch 19.3(i)). Es ist zu zeigen:
D◦ ⊂ D und D◦ ist offen;
(1)
O ⊂ D offen ⇒ O ⊂ D◦ .
(2)
Zu (1): Da D◦ ⊂ D erfüllt ist, ist nach (i) zu zeigen, daß jeder Punkt von D◦
innerer Punkt von D◦ ist. Sei also p ∈ D◦ , dann ist p innerer Punkt von D, und
es gibt daher ein O ∈ T (p) mit O ⊂ D. Ist nun q ∈ O, dann ist O Umgebung
von q mit O ⊂ D. Somit ist q innerer Punkt von D, d.h. q ∈ D◦ . Somit ist
O ⊂ D◦ und daher p innerer Punkt von D◦ .
Zu (2): Sei q ∈ O. Da O offen und O ⊂ D ist, ist q innerer Punkt von D, d.h.
q ∈ D◦ .
(iv) Es ist zu zeigen
(3)
(4)
D ⊂ D und D ist abgeschlossen;
D ⊂ A abgeschlossen ⇒ D ⊂ A.
Zu (3): Wegen D ⊂ D reicht zu zeigen, D ist abgeschlossen. Da Durchschnitte
abgeschlossener Mengen abgeschlossen sind, reicht es für die Abgeschlossenheit
von D zu zeigen:
D = ∩O∈T ,D⊂X\O (X \ O).
Sei p ∈ D und O ∈ T mit D ⊂ X \ O. Dann ist D ∩ O = ∅, und wegen p ∈ D
folgt p ∈ X \ O. Also liegt p im Durchschnitt aller Mengen X \ O mit O ∈ T
und D ⊂ X \ O.
Sei umgekehrt p ∈ X \ O für alle O ∈ T mit D ⊂ X \ O, d.h.
(5)
(O ∩ D = ∅ und O ∈ T ) ⇒ p ∈ X \ O.
Damit p ∈ D gilt, ist nun O ∩ D 6= ∅ für alle O ∈ Tp zu zeigen. Sei hierzu
O ∈ Tp , dann folgt O ∩ D 6= ∅, da andernfalls p ∈ X \ O nach (5) wäre, was
p ∈ O widerspricht.
Zu (4): Sei p ein Berührungspunkt von D. Es ist p ∈ A zu zeigen. Da p wegen
D ⊂ A aber auch Berührungspunkt von A ist, und da A abgeschlossen ist, folgt
p ∈ A nach (ii).
(v) Nach Definition der Randpunkte in 36.23(iii), des Abschlusses in 36.24(ii)
und des Randes in 36.24(iii) ist
∂(X \ D) = ∂D = D ∩ X \ D,
und daher abgeschlossen als Durchschnitt zweier nach (iv) abgeschlossener Mengen.
[36]–14
C1
Topologische Räume, Stetigkeit und Konvergenz von Funktionen
(vi) Es ist D◦ ∪ ∂D ⊂ D ∪ ∂D ⊂ D. Es bleibt zu zeigen:
D ⊂ D◦ ∪ ∂D.
Sei hierzu p ∈ D gewählt mit p 6∈ D◦ ; dann ist p ∈ ∂D zu zeigen. Da p ∈ D ist,
ist p Berührungspunkt von D. Da p 6∈ D◦ , enthält jede Umgebung von p einen
Punkt von X \ D, d.h. p ist auch Berührungspunkt von X \ D. Also ist p ein
Randpunkt von D, d.h. p ∈ ∂D.
(vii) Wir zeigen zunächst X \ D = (X \ D)◦ . Es ist X \ D, als Komplement
der nach (iv) abgeschlossenen Menge D offen. Aus X \ D ⊂ X \ D folgt daher
X \D ⊂ (X \D)◦ nach (iii). Ist umgekehrt p ∈ (X \D)◦ , so gibt es ein O ∈ T (p)
mit O(p) ⊂ X \ D, d.h. O(p) ∩ D = ∅. Also ist p 6∈ D. Daher gilt insgesamt
X \ D = (X \ D)◦ .
Wir zeigen nun X \ D = X \ D◦ . Es ist X \ D◦ als Komplement der nach (iii)
offenen Menge D◦ , abgeschlossen. Aus X \ D ⊂ X \ D◦ folgt daher X \ D ⊂
X \D◦ (siehe (iv)). Ist umgekehrt p ∈ X \D◦ , so gibt es, da p 6∈ D◦ ist, für jedes
O ∈ T (p) ein q ∈ O mit q 6∈ D. Also ist O ∩ (X \ D) 6= ∅ für jedes O ∈ T (p),
d.h. p ∈ X \ D. Also ist X \ D = X \ D◦ .
Es gilt (siehe auch den Beweis von (v)):
∂D = D ∩ (X \ D).
Nun ist X \ D = X \ D◦ , also ist ∂D = D ∩ (X \ D◦ ) = D \ D◦ .
Die Abgeschlossenheit einer Teilmenge eines pseudometrischen Raumes ließ sich
mit Hilfe von Folgenkonvergenz charakterisieren (siehe 33.26). Gleiches gilt auch
für den Abschluß und den Rand:
36.26 Charakterisierung des Abschlusses und des Randes in
pseudometrischen Räumen
Sei (X, d) ein pseudometrischer Raum, und sei D ⊂ X. Dann gilt:
(i)
(ii)
p ∈ D ⇐⇒ es ex. eine Folge (pn )n∈N in D mit pn → p.
p ∈ ∂D ⇐⇒ es ex. eine Folge (pn )n∈N in D mit pn → p und
eine Folge (qn )n∈N in X \ D mit qn → p.
Beweis. (i) ⇒“ Da p ∈ D ist, gibt es zu U1/n (p)(∈ Tp ) ein pn ∈ D ∩ U 1 (p).
n
”
Dann gilt aber 0 ≤ d(pn , p) < n1 , also konvergiert (pn )n∈N gegen p.
⇐“ Da pn ∈ D ⊂ D und D abgeschlossen ist (siehe 36.25(iv)), folgt p ∈ D
”
nach 33.26.
(ii) Wegen ∂D = D ∩ X \ D folgt die Behauptung aus (i).
36.25(vii)
36.27 Beispiel
Sei (V, k k) ein normierter Raum, p0 ∈ V und ε ∈ R+ . Dann gilt
(i)
(ii)
C1
Uε (p0 ) = {p ∈ V : kp − p0 k ≤ ε},
∂Uε (p0 ) = {p ∈ V : kp − p0 k = ε}.
[36]–15
Kapitel VIII
Normierte, metrische und topologische Räume
Beweis. (i) Es ist {p ∈ V : kp − p0 k ≤ ε} eine nach 33.26(ii) abgeschlossene
Menge. Somit gilt
Uε (p0 ) ⊂ {p ∈ V : kp − p0 k ≤ ε}.
Sei nun p ∈ V mit kp − p0 k ≤ ε gegeben. Es reicht zu zeigen, daß es eine
Folge pn ∈ Uε (p0 ) mit pn → p gibt (siehe etwa 36.26(i)). Wähle etwa pn =
p0 + tn (p − p0 ) mit 0 < tn < 1 und tn → 1. Dann gilt pn → p (siehe 33.22(iv))
und
kpn − p0 k = ktn (p − p0 )k = |tn | kp − p0 k ≤ tn ε < ε.
Also ist pn ∈ Uε (p0 ).
(ii) Da Uε (p0 ) offen ist (siehe 33.14), gilt
∂Uε (p0 )
=
36.25(vii)
Uε (p0 ) \ Uε (p0 )◦ = Uε (p0 ) \ Uε (p0 ) ={p ∈ V : kp − p0 k = ε}
(i)
Der Zwischenwertsatz und der hiermit äquivalente Satz, daß das stetige Bild
eines Intervalls wieder ein Intervall (oder ein Punkt) ist, war einer der zentralen
Sätze der Analysis I. Sei nun Z eine Teilmenge eines topologischen Raumes X
und f : Z → R stetig. Für welche Teilmengen Z von X gilt nun, daß das
Bild wieder ein Intervall (oder ein Punkt) ist? Wichtig hierfür wird sein, daß
Intervalle zusammenhängend“ sind. Während man also Intervalle intuitiv als
”
zusammenhängend ansehen wird, wird man [0, 1] ∪ [2, 3] bzw. [0, 1[ ∪ ]1, 3] als
nicht zusammenhängend ansehen.
Entsprechend wird man
(B 1)
als zusammenhängend, und
Vl
K1
(B 2)
K2
als nicht zusammenhängend
ansehen.
In 36.29 werden diese Vorstellungen präzisiert. 36.31 und 36.32 zeigen wie aus
zusammenhängenden Mengen neue zusammenhängende Mengen gebildet werden können. In 36.33 sehen wir, daß die mehrpunktigen zusammenhängenden
Teilmengen von R genau die Intervalle sind. In 36.39 schließlich betrachten wir den im Vergleich zum Zusammenhang intuitiveren Wegzusammenhang.
Nach 36.49 überzeugen wir uns davon, daß die Punktmenge in (B1) zusammenhängend ist.
[36]–16
C1
Topologische Räume, Stetigkeit und Konvergenz von Funktionen
36.28 Disjunkte Vereinigung
U
Sind A1 , A2 ⊂ X, so schreiben wir C = A1 A2 genau dann, wenn
C = A1 ∪ A2 und A1 ∩ A2 = ∅ ist. Ist dies der Fall, so nennen wir
C die disjunkte Vereinigung von A1 und A2 .
U
(ii) Sind Ai ⊂ X für i ∈ I, so schreiben wir C = i∈I Ai genau dann,
wenn C = ∪i∈I Ai und Ai1 ∩ Ai2 = ∅ ist für i1 , i2 ∈ I mit i1 6= i2 .
Ist dies der Fall, so nennen wir C wieder die disjunkte Vereinigung
von Ai , i ∈ I.
(i)
Nach Definition besagt also C = A1
U
A2 und C =
U
i∈{1,2} Ai
dasselbe.
Im folgenden werden wir der kürzeren Formulierung wegen einen topologischen
Raum häufig nur mit X bezeichnen, ohne die Topologie T mit anzugeben.
36.29 Zusammenhang
Sei X ein topologischer Raum.
(i)
X heißt zusammenhängend , wenn X nicht die disjunkte Vereinigung
zweier nicht-leerer offener Teilmengen von X ist, d.h. wenn gilt:
U
(O1 , O2 offen ∧ X = O1 O2 ) ⇒ (O1 = ∅ ∨ O2 = ∅).
(ii) Die leere Menge heißt zusammenhängend . Eine nicht-leere Teilmenge Z von X heißt zusammenhängend , wenn Z versehen mit der
Teilraumtopologie zusammenhängend ist. Also ist Z genau dann
zusammenhängend, wenn gilt:
U
(O1 , O2 offen in X ∧ Z = (O1 ∩ Z) (O2 ∩ Z)
⇒ (O1 ∩ Z = ∅ ∨ O2 ∩ Z = ∅).
(iii) Eine nicht-leere offene und zusammenhängende Teilmenge von X
heißt ein Gebiet.
Eine Teilmenge D des topologischen Raumes (X, T ) ist also genau dann nicht
zusammenhängend, wenn es O1 , O2 ∈ T gibt mit
U
O1 , O2 ∈ T ∧ D = (O1 ∩ D) (O2 ∩ D) ∧ O1 ∩ D 6= ∅ ∧ O2 ∩ D 6= ∅.
Wir prüfen nun die in allen einführenden Beispielen angegebenen Mengen auf
Zusammenhang.
Hiernach ist D := [0, 1] ∪ [2, 3] nicht zusammenhängend, wähle etwa
O1 := ] − ∞, 23 [, O2 := ] 23 , ∞[.
U
Dann sind O1 , O2 ∈ T , D = (O1 ∩ D) (O2 ∩ D) und O1 ∩ D sowie O2 ∩ D
nicht-leer.
Entsprechend ist D := [0, 1[ ∪ ]1, 3] nicht zusammenhängend. Wähle etwa
O1 := ] − ∞, 1[, O2 := ]1, ∞[.
C1
[36]–17
Kapitel VIII
Normierte, metrische und topologische Räume
Bei (B2) wähle man um die beiden disjunkten Kreisscheiben zwei größere offene disjunkte Kreisscheiben. Also kann die in (B2) dargestellte Menge nicht
zusammenhängend sein.
Der Zusammenhang von Intervallen folgt schließlich aus 36.33.
Den Zusammenhang der in (B1) dargestellten Menge zeigen wir nach 36.49.
Nach Definition des Zusammenhangs folgt ferner, daß die leere Menge und die
einpunktigen Mengen jedes topologischen Raumes zusammenhängend sind.
36.30 Äquivalente Formulierungen des Zusammenhangs
Sei X ein topologischer Raum. Dann sind äquivalent:
(i)
X ist zusammenhängend.
(ii)
(A1 , A2 abgeschlossen ∧ X = A1
U
A2 ) ⇒ (A1 = ∅ ∨ A2 = ∅).
∅, X sind die einzigen offenen und abgeschlossenen Teilmengen
von X.
U
Beweis. Die Äquivalenz von (i) und (ii) ergibt sich, daß für X = O1 O2
gilt: O1 und O2 offen ⇐⇒ O1 = X \ O2 , O2 = X \ O1 offen ⇐⇒ O2 und O1
abgeschlossen.
U
(i)⇒(iii) Ist O offen und abgeschlossen, so ist X\O offen und X = O (X\O).
Also ist nach (i) entweder O = ∅ oder X \ O = ∅, d.h. O = ∅ oder O = X.
U
(iii)⇒(i) Aus X =O1 O2 und O1 , O2 offen folgt: O1 (=X \O2 ) ist abgeschlossen. Also gilt O1 = ∅ oder O1 = X und somit in diesem Fall O2 = ∅.
(iii)
36.31 Vereinigungen zusammenhängender Mengen mit nichtleerem Durchschnitt sind zusammenhängend
Sei X ein topologischer Raum und seien Zi , i ∈ I, zusammenhängende
Teilmengen von X mit ∩i∈I Zi 6= ∅. Dann ist: ∪i∈I Zi zusammenhängend.
Beweis. Seien O1 , O2 offene Mengen in X mit
U
(1)
∪i∈I Zi = (O1 ∩ (∪i∈I Zi )) (O2 ∩ (∪i∈I Zi )).
Nach Voraussetzung gibt es nun ein p ∈ ∩i∈I Zi ⊂ O1 ∪ O2 . Sei o.B.d.A. p ∈ O1 .
(1)
Dann folgt:
(∀i ∈ I)(Zi = (O1 ∩ Zi )
(1)
U
(O2 ∩ Zi ) ∧ p ∈ O1 ∩ Zi ).
Da die Zi zusammenhängend sind, ergibt sich O2 ∩ Zi = ∅ für jedes i ∈ I. Also
ist auch O2 ∩ (∪i∈I Zi ) = ∅, d.h. ∪i∈I Zi ist zusammenhängend.
36.32 Der Abschluß einer zusammenhängenden Menge ist zusammenhängend
Sei Z ⊂ X zusammenhängend. Dann ist auch Z zusammenhängend.
[36]–18
C1
Topologische Räume, Stetigkeit und Konvergenz von Funktionen
Beweis. Seien O1 , O2 offene Mengen in X mit
U
(1)
Z = (O1 ∩ Z) (O2 ∩ Z).
U
Aus (1) folgt Z = (O1 ∩ Z) (O2 ∩ Z). Da Z aber nach Voraussetzung zusammenhängend ist, gibt es ein i ∈ {1, 2} mit
(2)
Oi ∩ Z = ∅.
Also ist X \Oi eine abgeschlossene Menge mit X \Oi ⊃ Z. Daher ist Z ⊂ X \Oi
(2)
(siehe 36.25(iv)). Somit ist Oi ∩ Z = ∅, d.h. Z ist zusammenhängend.
Der folgende Satz läßt sich auch so formulieren:
Enthält eine Teilmenge von R mindestens zwei Elemente, so ist sie genau dann
zusammenhängend, wenn sie ein Intervall ist.
36.33 Charakterisierung der zusammenhängenden Teilmengen
von R
Eine Teilmenge Z von R ist genau dann zusammenhängend, wenn Z = ∅,
einpunktig oder ein Intervall ist.
Beweis. ⇒“ Wir dürfen annehmen, daß Z mindestens zwei verschiedene
”
Punkte enthält. Sei nun indirekt
(1)
Z kein Intervall.
Dann gibt es nach Definition 5.1(x) zwei Punkte a, b ∈ Z und hierzu ein c ∈ R\Z
mit a < c < b. Dann sind, wenn T die kanonische Topologie von R bezeichnet:
(2)
O1 :=] − ∞, c[, O2 :=]c, ∞[ ∈ T
und wegen Z ⊂ R \ {c} = O1 ∪ O2 gilt:
U
(3)
Z = (O1 ∩ Z) (O2 ∩ Z).
Da Z zusammenhängend ist, folgt aus (2) und (3), daß O1 ∩Z = ∅ oder O2 ∩Z = ∅
ist. Dies ist ein Widerspruch zu a ∈ O1 ∩ Z und b ∈ O2 ∩ Z.
⇐“ Da die leere Menge und die einpunktigen Mengen zusammenhängend sind,
”
sei Z nun ein Intervall I. Angenommen, I ist nicht zusammenhängend, dann
existieren offene Mengen O1 , O2 in R mit
U
(4)
I = (O1 ∩ I) (O2 ∩ I), O1 ∩ I 6= ∅, O2 ∩ I 6= ∅.
Wähle
(5)
a ∈ O1 ∩ I und b ∈ O2 ∩ I mit o.B.d.A. a < b.
Dann gilt, da I ein Intervall ist:
(6)
[a, b] ⊂ I.
Betrachte nun
M := {t ∈ ]a, b] : [a, t] ⊂ O1 }.
Da O1 offen und a ∈ O1 ist, ist M 6= ∅. Setze
(7)
c := sup(M ) ∈ ]a, b] ⊂ I.
(6)
Wir behaupten:
C1
[36]–19
Kapitel VIII
Normierte, metrische und topologische Räume
(8)
[a, c[⊂ O1 ;
(9)
c 6∈ O1 ;
c 6∈ O2 .
(10)
Wegen I ⊂ O1 ∪O2 und c ∈ I, liefern (9) und (10) zusammen einen Widerspruch.
(4)
Also ist I daher doch zusammenhängend. Es verbleibt (8)—(10) zu zeigen.
Zu (8): Angenommen, es existiert ein u ∈ [a, c[ mit u 6∈ O1 . Wegen a ≤ u und
u 6∈ O1 folgt nach Definition von M, daß t < u für jedes t ∈ M ist. Also ist
c ≤ u mit Widerspruch zu u < c.
(7)
Zu (9): Wäre c ∈ O1 und somit c ∈ O1 ∩I nach (7), so ist c 6= b wegen b ∈ O2 ∩I
und der Disjunktheit (siehe (4)) von O1 ∩ I und O2 ∩ I. (Also ist c < b (siehe
(7)). Da O1 offen ist, gibt es ein ε ∈ R+ mit [c, c + ε] ⊂ O1 und c + ε < b.
Wegen (8) ist dann auch [a, c + ε] ⊂ O1 und somit c + ε ∈ M, im Widerspruch
dazu, daß c obere Schranke von M ist.
Zu (10): Wäre c ∈ O2 , dann gäbe es, da O2 offen und a < c ist, ein ε ∈ R+
mit c − ε ∈ O2 und a < c − ε. Wegen a < c − ε ist c − ε ∈ O1 nach (8). Da
ebenfalls c − ε ∈ [a, b] ⊂ I ist, erhalten wir einen Widerspruch zur Disjunktheit
von O1 ∩ I und O2 ∩ I.
36.34 Stetige Bilder zusammenhängender Mengen sind zusammenhängend
Seien (X1 , T1 ) und (X2 , T2 ) topologische Räume. Es sei Z ⊂ X1 zusammenhängend und f : X1 → X2 stetig. Dann ist f (Z) zusammenhängend.
Beweis. Seien O1 , O2 ∈ T2 mit
f (Z) = (O1 ∩ f (Z))
(1)
Dann folgt, da f stetig ist
(2)
Aus (1) ergibt sich
U
(O2 ∩ f (Z)).
f −1 (O1 ), f −1 (O2 ) ∈ T1 .
Z ⊂ f −1 (f (Z)) = f −1 (O1 ∩ f (Z))
(1)
U
f −1 (O2 ∩ f (Z))
und daher wegen f −1 (Oi ∩ f (Z)) ∩ Z = f −1 (Oi ) ∩ Z
U
(3)
Z = (f −1 (O1 ) ∩ Z) (f −1 (O2 ) ∩ Z).
Da Z zusammenhängend ist, existiert wegen (2) und (3) ein i ∈ {1, 2} mit
f −1 (Oi ) ∩ Z = ∅, also Oi ∩ f (Z) = ∅. Somit ist f (Z) zusammenhängend.
Als Korollar zu diesem Satz erhalten wir eine Verallgemeinerung von 15.2 und
15.5.
[36]–20
C1
Topologische Räume, Stetigkeit und Konvergenz von Funktionen
36.35 Verallgemeinerung des Zwischenwertsatzes von Bolzano
Sei X zusammenhängend und f : X → R stetig.
(i)
Seien p, q ∈ X und d eine Zahl, die zwischen f (p) und f (q) liegt.
Dann gibt es ein c ∈ X mit f (c) = d.
(ii)
f (X) ist einpunktig oder ein Intervall.
Beweis. (ii) Nach 36.34 ist f (X) ⊂ R zusammenhängend. Da ∅ 6= f (X) ist,
ist f (X) einpunktig oder ein Intervall (siehe 36.33).
(i) Es liegt d zwischen f (p) und f (q). Da f (p), f (q) aus dem Intervall f (X)
sind, ist auch d ∈ f (X). Also gibt es ein c ∈ X mit f (c) = d.
Der Wunsch, die Sätze 36.34 und 36.35 auf möglichst große zusammenhängende
Teile von X anwenden zu wollen, führt zum Begriff der Zusammenhangskomponente als bzgl. der Teilmengenrelation maximaler zusammenhängender Men”
ge“.
36.36 Zusammenhangskomponenten
Sei X ein topologischer Raum. Jede maximale zusammenhängende Teilmenge Z von X heißt eine Zusammenhangskomponente. Nach Definition
ist also Z eine Zusammenhangskomponente, wenn gilt:
(Z ist zusammenhängend) ∧ (Z ⊂ Z 0 , Z 0 zusammenhängend ) ⇒ Z = Z 0 .
Da einpunktige Mengen zusammenhängend sind, sind Zusammenhangskomponenten insbesondere nie leer.
36.37 Zerlegungssatz
Sei X ein topologischer Raum. Dann gilt:
(i) Die Zusammenhangskomponenten sind abgeschlossen.
(ii) Jede zusammenhängende Teilmenge von X liegt in einer Zusammenhangskomponente.
(iii) X ist die disjunkte Vereinigung aller Zusammenhangskomponenten.
(iv) X ist genau dann zusammenhängend, wenn es zu je zwei Punkten
von X eine zusammenhängende Teilmenge von X gibt, die beide
Punkte enthält.
Beweis. (i) Sei Z eine Zusammenhangskomponente von X. Dann ist Z und
somit Z (siehe 36.32) eine zusammenhängende Menge. Da Z ⊂ Z und Z eine
Zusammenhangskomponente ist, folgt Z = Z, d.h. Z ist abgeschlossen (siehe
36.25(ii)).
(ii) Sei p ∈ X. Bezeichne mit Zp die Vereinigung aller p enthaltenden zusammenhängenden Teilmengen von X. Dann ist Zp zusammenhängend nach 36.31.
Sei Z 0 eine Zp enthaltende zusammenhängende Teilmenge von X. Dann gilt
C1
[36]–21
Kapitel VIII
Normierte, metrische und topologische Räume
p ∈ Z 0 und somit Z 0 ⊂ Zp nach Definition von Zp . Also ist Zp = Z 0 und somit
Zp eine Zusammenhangskomponente.
Sei Z zusammenhängend. Wähle p ∈ Z. Dann gilt Z ⊂ Zp nach Konstruktion
der Zusammenhangskomponenten Zp im Beweis von (ii).
(iii) Wegen X = ∪p∈X Zp ist X die Vereinigung von Zusammenhangskomponenten. Zu zeigen bleibt:
(1)
Zp 6= Zq ⇒ Zp ∩ Zq = ∅,
(2)
Z Zusammenhangskomponente ⇒ Z = Zp für ein geeignetes p ∈ X.
Zu (1): Wäre Zp ∩ Zq 6= ∅, so wäre wieder nach 36.31 auch Zp ∪ Zq zusammenhängend. Wegen Zp , Zq ⊂ Zp ∪ Zq folgt Zp = Zp ∪ Zq = Zq im Widerspruch
zu Zp 6= Zq .
Zu (2): Es ist Z 6= ∅. Wähle p ∈ Z. Dann gilt Z ⊂ Zp nach Definiton von
Zp . Da Z eine Zusammenhangskomponente und Zp zusammenhängend ist, folgt
Z = Zp .
(iv) Ist X selbst zusammenhängend, so liegen je zwei Punkte von X in der
zusammenhängenden Menge X.
Umgekehrt gebe es zu je zwei Punkten von X eine zusammenhängende Menge,
die diese beiden Punkte enthält. Sei nun p0 ∈ X fest und q ∈ X. Zu zeigen
reicht
(3)
q ∈ Zp 0 ,
denn dann ist X = Zp0 und somit nach dem Beweis von (ii) zusammenhängend.
Zu (3): Nach Voraussetzung gibt es eine zusammenhängende Menge Z, die q
und p0 enthält. Dann ist Z ∪ Zp0 eine nach 33.31 zusammenhängende Menge
mit Zp0 ⊂ Z ∪ Zp0 . Da Zp0 eine Zusammenhangskomponente ist, gilt q ∈ Z ⊂
Z ∪ Z p 0 = Zp 0 .
Von einer Menge W wird man insbesondere dann erwarten, daß sie zusammenhängend ist, wenn man von jedem Punkt p ∈ W zu jedem Punkt q ∈ W
auf einem Weg gelangen kann, ohne dabei W zu verlassen. Die Präzisierung dieser Vorstellung führt zum Begriff der wegzusammenhängenden Teilmenge eines
topologischen Raumes:
X
W
[36]–22
C1
Topologische Räume, Stetigkeit und Konvergenz von Funktionen
36.38 Wege und Kurven
Sei X ein topologischer Raum.
(i) Jede Abbildung c eines Intervalles I ⊂ R in X nennt man einen
Weg (in X). Ist c stetig, so heißt c ein stetiger Weg.
(ii) Unter einer Kurve (in X) versteht man die zu einem Weg c : I → X
gehörende Bildmenge |c| := c(I)(= {c(t) : t ∈ I}).
(iii) Ist W ⊂ X und c ein Weg, so sagt man, der Weg c (oder die Kurve
|c|) liegt in W, wenn |c| ⊂ W ist.
(iv) Ist c : [a, b] → X ein Weg, so heißt c(a) der Anfangspunkt und c(b)
der Endpunkt des Weges.
(v) Sind p, q ∈ X, so sagt man, p und q können durch einen stetigen
Weg verbunden werden, wenn es einen stetigen Weg c : [a, b] → X
mit Anfangspunkt p und Endpunkt q gibt. Man sagt dann auch, c
verbindet p und q.
Man beachte den Unterschied zwischen dem Begriff Weg und Kurve. Während
eine Kurve also ein auf spezielle Weise gebildete Teilmenge von X ist, ist ein
Weg eine Abbildung eines Intervalls I in die Menge X. So kann eine Kurve z.B.
die Einheitskreislinie K1 := {p ∈ R2 : kpk2 = 1} im R2 zu ganz verschiedenen
Wegen gehören, z.B.:
c1 (t) := (cos(t), sin(t)), t ∈ [0, 2π];
c2 (t) := (cos(2t), sin(2t)), t ∈ [0, 2π];
denn es ist sowohl c1 ([0, 2π]) = K1 als auch c2 ([0, 2π]) = K1 , aber c1 6= c2 .
Durch c1 wird die Bewegung eines Punktes beschrieben, der die Einheitskreislinie einmal durchläuft, durch c2 aber die Bewegung eines Punktes, der in der
gleichen Zeit 2π die Einheitskreislinie zweimal durchläuft. Daher muß c2 die
Einheitskreislinie mit größerer Geschwindigkeit“ durchlaufen. Die exakte For”
mulierung dieses Begriffes werden wir im nächsten Kapitel geben. Einen Weg
kann man also intuitiv als einen Bewegungsablauf interpretieren, während man
eine Kurve mehr geometrisch als Menge von Punkten mit gewissen Eigenschaften interpretiert.
36.39 Wegzusammenhang
Sei X ein topologischer Raum. W ⊂ X heißt wegzusammenhängend,
wenn je zwei Punkte von W durch einen in W liegenden stetigen Weg
verbunden werden können. Expliziter:
(∀p, q ∈ W )
(∃c : [a, b] → X stetig mit c(a) = p, c(b) = q, und c([a, b]) ⊂ W ).
Sei W 6= ∅. Dann ist nach 36.16 die Bedingung in 36.39, falls man W mit der
Teilraumtopologie versieht, äquivalent zu
(∀p, q ∈ W )(∃c : [a, b] → W stetig mit c(a) = p, c(p) = q).
C1
[36]–23
Kapitel VIII
Normierte, metrische und topologische Räume
Dies heißt aber nach 36.39: Der Teilraum W versehen mit der Teilraumtopologie ist wegzusammenhängend. Also kann man auch entsprechend wie in 36.29
formulieren:
36.40 Äquivalente Formulierung des Wegzusammenhangs
Sei X ein topologischer Raum und W ⊂ X. Dann ist W genau dann
wegzusammenhängend, wenn W = ∅ oder für W 6= ∅ der topologische
Teilraum W von X wegzusammenhängend ist.
Um den Wegzusammenhang von Mengen zu beweisen, benutzen wir in der Regel
die in 36.39 gegebene explizite Formulierung. Mit dieser beweisen wir als erstes
einen Satz, der für wegzusammenhängende Mengen analoges aussagt wie der
Satz 36.34 für zusammenhängende Mengen.
36.41
Stetige Bilder wegzusammenhängender Mengen sind
wegzusammenhängend
Seien (X1 , T1 ) und (X2 , T2 ) topologische Räume. Es sei W ⊂ X1 wegzusammenhängend und f : X1 → X2 stetig. Dann ist f (W ) wegzusammenhängend.
Beweis. Seien p, q ∈ f (W ), also p = f (e
p) und q = f (e
q ) mit e
p, e
q ∈ W. Da
W wegzusammenhängend ist, so existiert ein stetiger Weg c : [a, b] → X1 mit
c([a, b]) ⊂ W und c(a) = e
p, c(b) = e
q . Dann ist auch f ◦c : [a, b] → X2 stetig (siehe
36.14) mit (f ◦c)([a, b]) ⊂ f (W ), (f ◦c)(a) = f (e
p) = p und (f ◦c)(b) = f (e
q ) = q.
Daher ist f (W ) wegzusammenhängend.
36.42 Beziehungen zwischen wegzusammenhängenden und zusammenhängenden Mengen
(i)
(ii)
Jede wegzusammenhängende Teilmenge von X ist zusammenhängend.
Zusammenhängende Teilmengen (z.B. von R2 ) müssen jedoch
nicht wegzusammenhängend sein.
Beweis. (i) Sei W 6= ∅ eine wegzusammenhängende Teilmenge. Seien O1 , O2
offene Mengen in X mit
U
(1)
W = (O1 ∩ W ) (O2 ∩ W ).
Zu zeigen ist: O1 ∩ W = ∅ oder O2 ∩ W = ∅. Angenommen, es existieren
p1 ∈ O1 ∩ W und p2 ∈ O2 ∩ W. Da W wegzusammenhängend ist, existiert dann
ein stetiger Weg c : [a, b] → W mit c(a) = p1 , c(b) = p2 . Da [a, b] nach 36.33
zusammenhängend ist, ist |c| = c([a, b]) eine nach 36.34 zusammenhängende
Teilmenge von W. Aus (1) folgt dann
U
|c| = (O1 ∩ |c|) (O2 ∩ |c|).
Wegen p1 ∈ O1 ∩ |c| und p2 ∈ O2 ∩ |c| widerspricht dieses dem Zusammenhang
von |c|.
[36]–24
C1
Topologische Räume, Stetigkeit und Konvergenz von Funktionen
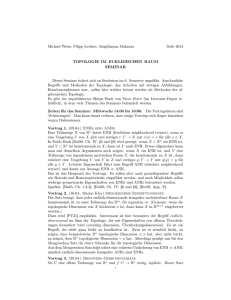
(ii) Nach Übungsaufgabe 27 ist {(t, sin 1t ) : t ∈ R+ } ∪ ({0} × [−1, 1]) eine
zusammenhängende, jedoch nicht wegzusammenhängende Teilmenge von R2 .
1
0
1
2π
1
π
2
π
−1
Im folgenden wollen wir zeigen, daß für gewisse Teilmengen der Zusammenhang
doch den Wegzusammenhang impliziert.
Als Vorüberlegung hierzu beweisen wir ein auch sonst häufig nützliches Kriterium für Stetigkeit.
36.43 Abbildungen sind stetig, wenn die Restriktionen auf endlich viele abgeschlossene, den Grundraum überdeckende
Mengen stetig sind
Seien (X1 , T1 ) und (X2 , T2 ) topologische Räume und f : X1 → X2 eine
Abbildung. Es seien:
(1)
(2)
A1 , . . . , An abgeschlossene Teilmengen von X1 mit X1 = ∪ni=1 Ai .
f |Ai : Ai → X2 stetige Funktionen für i = 1, . . . , n.
Dann ist f : X1 → X2 stetig.
Beweis. Sei A eine abgeschlossene Teilmenge von X2 . Dann gilt wegen (2) für
i = 1, . . . , n (benutze 36.13)
(3)
f −1 (A) ∩ Ai = (f |Ai )−1 (A) ist abgeschlossen in Ai .
Da Ai nach (1) aber abgeschlossene Teilmengen von X1 sind, ist f −1 (A) ∩ Ai
auch eine abgeschlossene Menge in X1 . Daher ist
f −1 (A) = ∪ni=1 (f −1 (A) ∩ Ai ) abgeschlossen,
(1)
als endliche Vereinigung von abgeschlossenen Mengen. Also ist f stetig (siehe
36.13).
C1
[36]–25
Kapitel VIII
Normierte, metrische und topologische Räume
36.44 Inverser Weg und Summe von Wegen
Sei X ein topologischer Raum.
(i)
Ist c : [a, b] → X ein Weg, so ist c− : [a, b] → X, definiert durch
c− (t) := c(a + b − t) für t ∈ [a, b], ein Weg. c− heißt der zu c inverse
Weg. Es gilt |c− | = |c| und der Anfangspunkt (bzw. Endpunkt) von
c− ist der Endpunkt (bzw. Anfangspunkt) von c. Ist c ein stetiger
Weg, so ist auch c− ein stetiger Weg. Verbindet daher c die Punkte
p und q, so verbindet c− die Punkte q und p.
(ii) Seien c1 : [a1 , a2 ] → X und c2 : [a2 , a3 ] → X zwei Wege mit c1 (a2 ) =
c2 (a2 ). Setzt man dann
½
c1 (t) für t ∈ [a1 , a2 ],
c(t) :=
c2 (t) für t ∈ [a2 , a3 ],
so ist c : [a1 , a3 ] → X ein Weg. c nennt man die Summe von c1 und
c2 und bezeichnet c mit c1 ⊕ c2 . Dann gilt:
|c1 ⊕ c2 | = |c1 | ∪ |c2 |.
Sind c1 , c2 zwei stetige Wege, so ist auch c1 ⊕ c2 ein stetiger Weg.
Verbindet c1 die Punkte p und q und c2 die Punkte q und r, so
verbindet c1 ⊕ c2 die Punkte p und r.
(iii) Ist c : [a, b] → X ein Weg und [a2 , a3 ] ein beliebiges Intervall, so ist
c ◦ ϕ : [a2 , a3 ] → X ein Weg mit |c| = |c ◦ ϕ|, c(a) = (c ◦ ϕ)(a2 ),
c(b) = (c ◦ ϕ)(a3 ), wenn man definiert:
b−a
aa3 − ba2
+
t für t ∈ [a2 , a3 ].
ϕ(t) =
a3 − a2
a3 − a2
Ist c ein stetiger Weg, so ist auch c ◦ ϕ ein stetiger Weg.
Beweis. (i) ϕ(t) := a + b − t für t ∈ [a, b] liefert eine stetige Abbildung von
[a, b] auf [a, b]. Daher ist c− = c ◦ ϕ : [a, b] → X stetig, wenn c stetig ist. Ferner
gilt |c− | = |c| und c− (a) = c(b), c− (b) = c(a).
(ii) Wegen c1 (a2 ) = c2 (a2 ) ist c : [a1 , a3 ] eindeutig definiert mit c|[a1 , a2 ] = c1
und c|[a2 , a3 ] = c2 . Sind c1 und c2 stetig, so ist auch c stetig. (Wende 36.43 auf
X1 := [a1 , a3 ] und A1 := [a1 , a2 ], A2 := [a2 , a3 ] an).
|c1 ⊕ c2 | = (c1 ⊕ c2 )([a1 , a3 ]) = c1 ([a1 , a2 ]) ∪ c2 ([a2 , a3 ]) = |c1 | ∪ |c2 |.
(iii) ϕ ist stetig und streng monoton wachsend mit
ϕ(a2 ) =
aa3 −ba2 +ba2 −aa2
a3 −a2
= a,
ϕ(a3 ) =
aa3 −ba2 +ba3 −aa3
a3 −a2
= b.
Also ist ϕ eine stetige Abbildung von [a2 , a3 ] auf [a, b] und daher ist c ◦ ϕ :
[a2 , a3 ] → X stetig, wenn c stetig ist. Es ist (c◦ϕ)(a2 ) = c(a), (c◦ϕ)(a3 ) = c(b).
Wegen ϕ([a2 , a3 ]) = [a, b] ist ferner |c ◦ ϕ| = c(ϕ([a2 , a3 ])) = c([a, b]) = |c|.
Ist X ein R-Vektorraum und c1 , c2 : I → X, so beachte man den Unterschied
zwischen c1 +c2 und dem (unter diesen Voraussetzungen nicht bildbaren) c1 ⊕c2 .
[36]–26
C1
Topologische Räume, Stetigkeit und Konvergenz von Funktionen
36.45 Verbindung von Punkten durch Kurven
Man sagt, eine Kurve |c1 | verbindet p und q, wenn es einen stetigen Weg
c : [a, b] → X gibt, der p mit q verbindet und für den |c| = |c1 | ist.
Mit dieser Terminologie folgt aus 36.44
36.46 Verbindbarkeit von Punkten ist eine Äquivalenzrelation
(i)
(ii)
Jeder Punkt p ist mit sich selbst verbindbar.
Ist p mit q verbindbar, so ist q mit p verbindbar. Genauer gilt:
Verbindet eine Kurve die Punkte p und q, so verbindet sie auch die
Punkte q und p.
(iii) Sind p und q, sowie q und r verbindbar, so auch p und r. Genauer
gilt:
Verbindet die Kurve |c1 | die Punkte p und q und die Kurve |c2 | die
Punkte q und r, so ist auch |c1 | ∪ |c2 | eine Kurve, die die Punkte p
und r verbindet.
Beweis. (i) Betrachte den stetigen Weg c : [0, 1] → X definiert durch
c(t) := p für t ∈ [0, 1].
(ii) Bezeichne die Kurve, die p und q verbindet, mit |c1 |. Es sei c : [a, b] → X
ein stetiger Weg mit c(a) = p, c(b) = q und |c| = |c1 |. Dann verbindet der stetige
Weg c− nach 36.44(i) die Punkte q und p mit |c− | = |c| = |c1 |. Also verbindet
auch |c1 | die Punkte q und p.
(iii) Seien o.B.d.A. c1 : [a1 , a2 ] → X bzw. c2 : [a, b] → X stetige Wege,
die die Punkte p und q bzw. q und r verbinden. Dann sei a3 > a2 und ϕ
die in 36.44(iii) angegebene Funktion. Dann ist c2 ◦ ϕ ein die Punkte q und r
verbindender stetiger Weg mit |c2 | = |c2 ◦ ϕ|. Nach 36.44(ii) ist nun aber auch
c1 ⊕ (c2 ◦ ϕ) ein p und r verbindender stetiger Weg mit
|c1 ⊕ (c2 ◦ ϕ)| = |c1 | ∪ |c2 ◦ ϕ| = |c1 | ∪ |c2 |.
In 27.4 ist für a, b ∈ R definiert
< a, b >:= {a} für a = b und < a, b >:= [min(a, b), max(a, b)] für a 6= b.
Es gilt:
< a, b >= {λa + (1 − λ)b : 0 ≤ λ ≤ 1}.
Beweis. Für a = b ist dies trivial. Da < a, b >=< b, a > und {λa + (1 − λ)b :
0 ≤ λ ≤ 1} = {λ0 b + (1 − λ0 )a : 0 ≤ λ0 ≤ 1} ist, kann man a < b annehmen.
Für a < b folgt die Behauptung mit Hilfe von 2.5.
Wir definieren nun entsprechend für zwei Punkte p, q eines R-Vektorraumes
V die Verbindungsstrecke < p, q > vermöge < p, q >:= {λp + (1 − λ)q : 0 ≤
λ ≤ 1}. Dann ist wieder < p, q >=< q, p > und somit auch gleich der Menge
{p + λ(q − p) : 0 ≤ λ ≤ 1}.
C1
[36]–27
Kapitel VIII
Normierte, metrische und topologische Räume
36.47 Verbindungsstrecken und Polygonzüge
Sei V ein R-Vektorraum.
(i)
Sind p, q zwei Punkte von V, so heißt
< p, q >:= {λp + (1 − λ)q : 0 ≤ λ ≤ 1}
die Verbindungsstrecke von p und q.
(ii) P heißt Polygonzug (oder auch Streckenzug), wenn es n Punkte
n−1
p1 , . . . , pn ∈ V gibt mit P = ∪i=1
< pi , pi+1 > .
Man sagt dann, P verbindet p1 und pn und nennt P auch den
Streckenzug durch die Punkte p1 , . . . , pn .
(iii) S ⊂ V heißt sternförmig, wenn S einen Sternpunkt besitzt. Dabei
heißt ein zu S gehörender Punkt p0 Sternpunkt, wenn gilt:
< p0 , q >⊂ S für jedes q ∈ S.
(iv) K ⊂ V heißt konvex , wenn mit p, q ∈ K auch < p, q >⊂ K ist.
Eine nicht-leere konvexe Menge ist offensichtlich eine sternförmige Menge: Jeder
Punkt p0 ∈ K ist nämlich ein Sternpunkt von S.
Ist S sternförmig mit Sternpunkt p0 , so sind je zwei Punkte p, q von S durch
den in S liegenden Polygonzug < p, p0 > ∪ < p0 , q > verbindbar.
36.48 Wegzusammenhang von Mengen, die durch Polygonzüge
verbindbar sind
Sei (V, k k) ein normierter Raum. Dann gilt:
(i)
Ist P ein Polygonzug, so ist P = |c| für eine Kurve eines stetigen
Weges c : [a, b] → X.
(ii) Sind je zwei Punkte einer Menge Z ⊂ V durch einen in Z liegenden
Polygonzug verbindbar, so ist Z wegzusammenhängend.
(iii) Jede sternförmige Menge ist wegzusammenhängend.
(iv) Jede konvexe Menge ist wegzusammenhängend; insbesondere ist
also V selbst wegzusammenhängend.
n−1
Beweis. (i) Wegen 36.46(iii) und P = ∪i=1
< pi , pi+1 > reicht es zu
zeigen: Eine Verbindungsstrecke < p, q > läßt sich als Bild eines stetigen Weges
c : [0, 1] → V darstellen. Da c(t) := p + t(q − p), t ∈ [0, 1], nach 33.22(iv),(ii)
stetig ist, folgt die Darstellung aus < p, q >= c([0, 1]).
(ii) Da je zwei Punkte von Z durch einen in Z liegenden Polygonzug verbindbar sind, sind sie nach (i) erst recht durch einen stetigen Weg c : [a, b] → Z
verbindbar. Also ist Z wegzusammenhängend.
[36]–28
C1
Topologische Räume, Stetigkeit und Konvergenz von Funktionen
(iii) folgt aus (ii), da in einer sternförmigen Menge je zwei Punkte durch einen
in der sternförmigen Menge liegenden Polygonzug verbunden werden können.
(iv) folgt aus (iii), da jede nicht-leere konvexe Menge sternförmig ist.
Sei V ein normierter Raum. Dann ist für jedes p ∈ V und ε ∈ R+ :
•
Uε (p) konvex,
denn sind q1 , q2 ∈ Uε (p) und t ∈ ]0, 1[, so gilt für q = t q1 + (1 − t)q2 :
kp − qk = kt(p − q1 ) + (1 − t)(p − q2 )k
≤ tkp − q1 k + (1 − t)kp − q2 k < t ε + (1 − t)ε = ε.
Entsprechend zeigt man, daß
•
{q ∈ V : kq − pk ≤ ε} konvex
ist. Also sind im Bild (B1) die beiden abgeschlossenen Kreisscheiben K1 , K2
konvex und somit zusammenhängend. Die Verbindungsstrecke Vl ist zusammenhängend. Wegen K1 ∩Vl 6= ∅ ist daher K1 ∪Vl und entsprechend K1 ∪Vl ∪K2
zusammenhängend.
Zusammenhangskomponenten sind nach 36.37(i) immer abgeschlossen, in der
Regel aber nicht offen. Es gilt jedoch
36.49 Zusammenhangskomponenten offener Mengen eines normierten Vektorraumes sind offen
Sei (V, k k) ein normierter Vektorraum. Es sei O eine nicht-leere offene Teilmenge von V. Dann ist jede Zusammenhangskomponente des
topologischen Teilraumes O offen.
Beweis. Sei Z eine Zusammenhangskomponente von O und p ∈ Z. Dann gibt
es, da O offen ist, ein ε ∈ R+ mit Uε (p) ⊂ O. Nun ist Z zusammenhängend, und
Uε (p) ist als konvexe Menge ebenfalls zusammenhängend. Da p ∈ Z ∩ Uε (p) ist,
ist daher Z ∪ Uε (p) zusammenhängend (siehe 36.31). Da Z ⊂ Z ∪ Uε (p) und Z
Zusammenhangskomponente ist, gilt Z = Z ∪ Uε (p), d.h. Uε (p) ⊂ Z. Also ist Z
offen.
36.50 Zusammenhängende offene Mengen eines normierten
Raumes sind wegzusammenhängend
Sei (V, k k) ein normierter Raum und O eine offene Teilmenge von V.
Dann sind äquivalent:
C1
(i)
O ist zusammenhängend.
(ii)
O ist wegzusammenhängend.
(iii)
Je zwei Punkte von O sind durch einen in O liegenden Polygonzug verbindbar.
[36]–29
Kapitel VIII
Normierte, metrische und topologische Räume
Beweis. (iii) ⇒(ii) nach 36.48(ii)
(ii) ⇒(i) nach 36.42(i)
(i) ⇒(iii) Sei o.B.d.A. O 6= ∅. Wähle p ∈ O und O1 := {q ∈ O : q ist durch
einen Polygonzug, der in O liegt, mit p verbindbar}. Mit O2 := O \ O1 gilt
U
dann:
O = O1 O 2 .
Wir zeigen O1 und O2 sind offen (und somit offen in O). Hieraus folgt wegen
O1 6= ∅ und des Zusammenhangs von O, daß O2 = ∅, d.h. O = O1 ist.
Zur Offenheit von O1 :
Sei q ∈ O1 . Dann gibt es, da O offen ist, ein Uε (q) ⊂ O. Wegen q ∈ O1 ist q
mit p durch einen in O liegenden Polygonzug P mit Endpunkt q verbindbar.
Ist z ∈ Uε (q), dann ist P ∪ < q, z > ein in O liegender Polygonzug, der p mit z
verbindet. Also ist z ∈ O1 , d.h. Uε (q) ⊂ O1 . Somit ist O1 offen.
Zur Offenheit von O2 :
Sei q ∈ O2 . Dann gibt es, da O offen ist, wieder ein Uε (q) ⊂ O. Sei z ∈ Uε (q).
Wäre nun z 6∈ O2 , also in O1 , dann wäre p mit z durch einen in O liegenden
Polygonzug verbindbar. Wie eben erhält man, daß dann p mit q durch einen in
O liegenden Polygonzug verbindbar wäre, im Widerspruch zu q 6∈ O1 .
Eine nicht-leere offene und zusammenhängende Menge heißt Gebiet (siehe
36.29(iii)). Gebiete eines normierten Raumes sind also, nach vorangegangenem
Satz, auch wegzusammenhängend. Genauer lassen sich sogar zwei Punkte eines
Gebietes immer durch einen im Gebiet liegenden Polygonzug verbinden.
Jede offene Menge zerfällt nun nach folgendem Satz in Gebiete. In einem
endlich-dimensionalen Raum ist die Anzahl die Gebiete abzählbar.
36.51 Zerlegung von offenen Mengen eines normierten Raumes
in Gebiete
Sei (V, k k) ein normierter Raum. Dann gilt:
(i)
Jede offene nicht-leere Teilmenge von V ist die disjunkte Vereinigung von Gebieten.
(ii)
Jede offene nicht-leere Teilmenge eines endlich-dimensionalen
R-Vektorraumes ist die disjunkte Vereinigung abzählbar vieler
Gebiete.
(iii)
Jede nicht-leere offene Teilmenge von R ist die disjunkte Vereinigung abzählbar vieler offener Intervalle.
Beweis. (i) Wende den Zerlegungssatz (siehe 36.37) auf eine offene und
nicht-leere Teilmenge X von V an. Dann ist X die disjunkte Vereinigung seiner
Zusammenhangskomponenten. Da X in V offen ist, sind die Zusammenhangskomponenten von X offen nach 36.49.
(ii) Betrachte eine Basis (v1 , . . . , vn ) des endlich-dimensionalen Vektorraumes
mit der
U zugehörigen Norm k k∞ . Ist O nicht-leer und offen, dann gilt nach (i):
O = i∈I Gi mit Gebieten Gi .
[36]–30
C1
Topologische Räume, Stetigkeit und Konvergenz von Funktionen
Wir zeigen I ist abzählbar.
Da Gi nicht-leer und offen sind, gibt es einen Punkt
Pn
i
pi ∈ Gi mit pi = j=1 λj vj und (λi1 , . . . , λin ) ∈ Qn . (Wähle gi ∈ Gi und εi ∈ R+
P
und Uεi (gi ) ⊂ Gi . Ist gi = nj=1 µij vj , so wähle λij ∈ Q mit |λij − µij | < εi ). Sind
nun i1 6= i2 , so sind pi1 6= pi2 und somit (λi11 , . . . , λin1 ) 6= (λi12 , . . . , λin2 ). Es gibt
also eine injektive Abbildung von I in Qn . Also gilt kard(I) ≤ kard(Qn ). Nun
ist nach 11.8 zunächst kard(Q) ≤ kard(N) und dann auch kard(Qn ) ≤ kard(N).
Also ist kard(I) ≤ kard(N), d.h. I ist abzählbar (siehe 11.8(i)).
(iii) Nach (ii) reicht es zu zeigen, daß ein Gebiet in R ein offenes Intervall
ist. Ein Gebiet ist nach Definition nicht-leer und enthält als offene Teilmenge
von R dann mindestens zwei Punkte. Also ist ein Gebiet in R eine mindestens
zwei Punkte enthaltende zusammenhängende Menge, also ein Intervall (siehe
36.33). Ein Gebiet in R ist eine offene Menge, also — nach vorausgegangener
Überlegung — eine offene Menge, die ein Intervall ist, also ist ein Gebiet ein
offenes Intervall (siehe 5.7(i)).
Im folgenden wird unter einer beliebigen Vereinigung ∪i∈I Mi auch die Vereinigung von gar keinen Mengen, d.h. I = ∅ zugelassen. Man setzt dann in
Einklang mit der Definition
∪i∈I Mi := {x : (∃i ∈ I)x ∈ Mi },
∪i∈∅ Mi = ∅.
Ist S ein beliebiges Mengensystem, so versteht man unter dem System aller
endlichen Durchschnitte von Mengen von S das System
{S1 ∩ . . . ∩ Sn : Si ∈ S für i = 1, . . . , n, n ∈ N beliebig}.
36.52 Die von einem Mengensystem erzeugte Topologie
Sei X eine nicht-leere Menge und S ⊂ P(X). Es sei T (S) das System
beliebiger Vereinigungen von endlichen Durchschnitten von Mengen von
S ∪ {X}.
Dann ist T (S) die kleinste Topologie, die S umfaßt, d.h. es gilt:
(i)
(ii)
(iii)
T (S) ist eine Topologie;
S ⊂ T (S);
S ⊂ T 0 und T 0 Topologie über X ⇒ T (S) ⊂ T 0 .
Ist T eine beliebige Topologie und gilt T (S) = T , so sagt man, S erzeugt
die Topologie T und nennt auch T die von S erzeugte Topologie.
Beweis. Die Eigenschaft (ii) ist trivial, die Eigenschaft (iii) folgt unmittelbar
aus S ∪ {X} ⊂ T 0 und der Tatsache, daß endliche Durchschnitte und beliebige Vereinigungen von Mengen einer Topologie wieder zur Topologie gehören
müssen.
Zum Nachweis von (i) bleibt nach Definition von T (S) lediglich zu zeigen:
O1 , O2 ∈ T (S) ⇒ O1 ∩ O2 ∈ T (S).
Sei hierzu S1 das System der endlichen Durchschnitte von Mengen aus S ∪ {X}.
C1
[36]–31
Kapitel VIII
Normierte, metrische und topologische Räume
Da O1 , O2 ∈ T (S) sind, existieren — nach Definition von T (S) — Mengen
Ai , Bj ∈ S1 mit
O1 = ∪i∈I Ai , O2 = ∪j∈J Bj .
Dann ist
O1 ∩ O2 = ∪(i,j)∈I×J (Ai ∩ Bj ).
Wegen Ai ∩ Bj ∈ S1 folgt damit O1 ∩ O2 ∈ T (S).
Nach diesem Satz erzeugt also jedes beliebige Mengensystem S ⊂ P(X) eine
eindeutige Topologie. Dies macht man sich vielfältig nutzbar, z.B.:
36.53 Produkttopologie über X1 × . . . × Xn
Seien (Xi , Ti ) topologische Räume für i = 1, . . . , n.
(i) Die von S := {O1 × . . . × On : Oi ∈ Ti für i = 1, . . . , n} erzeugte
Topologie heißt die Produkttopologie über X1 × . . . × Xn .
X1 × . . . × Xn , versehen mit dieser Topologie, heißt topologischer
Produktraum von (Xi , Ti ), i = 1, . . . , n.
Eine Menge ist genau dann offen bzgl. der Produkttopologie, wenn
sie eine beliebige Vereinigung von Mengen aus S ist.
(ii) Eine Menge O ⊂ X1 × . . . × Xn ist genau dann offen bzgl. der
Produkttopologie, wenn es zu jedem Punkt (p1 , . . . , pn ) ∈ O Umgebungen Oi ∈ (Ti )pi mit O1 × . . . × On ⊂ O gibt.
Beweis. (i) Es ist X = X1 × . . . × Xn ∈ S, und es gilt:
(O1 × . . . × On ) ∩ (O10 × . . . × On0 ) = (O1 ∩ O10 ) × . . . × (On ∩ On0 ).
(1)
Also ist mit O, O0 ∈ T auch O ∩ O0 ∈ S.
Also besteht die Produkttopologie, also T (S), nach 36.52 genau aus den Vereinigungen von Mengen aus S.
(ii) Ist O offen bzgl. der Produkttopologie, so ist O nach (i) Vereinigung von
Mengen aus S. Wegen p = (p1 , . . . , pn ) ∈ O liegt daher (p1 , . . . , pn ) in einer
Menge O1 × . . . × On ⊂ O mit Oi ∈ Ti .
Ist umgekehrt die angegebene Bedingung erfüllt, so gibt es zu jedem p ∈ O ein
Sp ∈ S mit p ∈ Sp ⊂ O. Also ist O = ∪p∈O Sp ∈ T (S).
Der folgende Satz liefert ein oft anwendbares technisches“ Hilfsmittel insbe”
sondere zum Nachweis der Stetigkeit von Abbildungen.
36.54 Erzeugung von Topologien mittels Abbildungen
Sei f : X1 → X2 eine Abbildung und S2 ⊂ P(X2 ) ein beliebiges Mengensystem. Dann gilt:
(i)
{f −1 (O) : O ∈ T (S2 )} = T ({f −1 (O) : O ∈ S2 }).
(ii) Ist T2 eine Topologie über X2 , so ist {f −1 (O) : O ∈ T2 } eine Topologie über X1 , und zwar die kleinste Topologie T 0 , bzgl. derer f
T 0 , T2 -stetig ist.
[36]–32
C1
Topologische Räume, Stetigkeit und Konvergenz von Funktionen
Beweis. (ii) Sei T2 Topologie über X2 . Wir zeigen als erstes
T := {f −1 (O) : O ∈ T2 } ist Topologie über X1 .
Nun gilt ∅, X1 ∈ T , da ∅ = f −1 (∅), X1 = f −1 (X2 ) mit ∅, X2 ∈ T2 .
Seien O1 , O2 ∈ T , d.h. Oi = f −1 (Oi0 ) mit Oi0 ∈ T2 für i = 1, 2. Dann ist
O1 ∩ O2 = f −1 (O10 ) ∩ f −1 (O20 ) = f −1 (O10 ∩ O20 ) mit O10 ∩ O20 ∈ T2 . Also ist
O 1 ∩ O2 ∈ T .
Seien Oi ∈ T für i ∈ I, d.h. Oi = f −1 (Oi0 ) mit Oi0 ∈ T2 für i ∈ I. Also ist
∪i∈I Oi = ∪i∈I f −1 (Oi0 ) = f −1 (∪i∈I Oi0 ) mit ∪i∈I Oi0 ∈ T2 , d.h. ∪i∈I Oi ∈ T .
T ist also eine Topologie mit f −1 (O) ∈ T für O ∈ T2 , d.h. f ist T , T2 -stetig.
Ist T 0 eine weitere Topologie, bzgl. derer f T 0 , T2 -stetig ist, so ist zu zeigen:
T ⊂ T 0.
Ist nun O ∈ T , dann ist O = f −1 (O2 ) mit O2 ∈ T2 . Da f T 0 , T2 -stetig ist folgt
dann O = f −1 (O2 ) ∈ T 0 .
(i) Nach (ii) gilt:
(1)
Daher folgt
(2)
{f −1 (O) : O ∈ T (S2 )} ist eine Topologie über X1 .
T1 := T ({f −1 (O) : O ∈ S2 }) ⊂ {f −1 (O) : O ∈ T (S2 )}.
Es bleibt somit zu zeigen
(3)
f −1 (O) ∈ T1 für O ∈ T (S2 ).
(3) gilt zunächst für O ∈ S2 , nach Definition von T1 in (2), und dann auch für
O ∈ S2 ∪ {X2 } wegen f −1 (X2 ) = X1 ∈ T1 . Ist nun O = O1 ∩ . . . ∩ On mit
Oi ∈ S2 ∪ {X2 }, dann ist f −1 (O) = ∩ni=1 f −1 (Oi ) ∈ T1 , da T1 eine Topologie
ist. Ist schließlich O ∈ T (S2 ), also eine beliebige Vereinigung solcher endlichen
Durchschnitte (siehe 36.52), so folgt entsprechend, da T1 eine Topologie ist, daß
f −1 (O) ∈ T1 ist. Somit gilt (3).
36.55 Kriterium für die Stetigkeit
Seien (X1 , T1 ) und (X2 , T2 ) topologische Räume. S2 erzeuge die Topologie
T2 , und es seif : X1 → X2 eine Abbildung mit
f −1 (S2 ) ∈ T1 für S2 ∈ S2 .
Dann ist f T1 , T2 -stetig.
Beweis. Es ist nach Voraussetzung {f −1 (S2 ) : S2 ∈ S2 } ⊂ T1 und daher, da
T1 eine Topologie ist, gilt:
(1)
T ({f −1 (S2 ) : S2 :∈ S2 }) ⊂ T1 .
Nach Voraussetzung gilt T2 = T (S2 ), und die Behauptung folgt daher aus (1)
wegen
{f −1 (O) : O ∈ T (S2 )} = T ({f −1 (S2 ) : S2 ∈ S2 }).
36.54(i)
C1
[36]–33
Kapitel VIII
Normierte, metrische und topologische Räume
Für die Anwendung von Satz 36.55 ist es wichtig, (möglichst kleine) Erzeugendensysteme von Topologien zu kennen:
36.56 Spezielle Erzeugendensysteme von Topologien
(i)
Sei (X, d) ein pseudometrischer Raum, dann ist {Uε (p) : p ∈ X,
ε ∈ R+ } ein Erzeugendensystem von T (d).
(ii) {]a, b[: a, b ∈ R ∧ a < b} erzeugt die kanonische Topologie von R;
{]a, ∞[, ] − ∞, b[ : a, b ∈ R} ebenfalls.
b ε ∈ R+ } erzeugt die kanonische Topologie von R;
b
(iii) {Uε (p) : p ∈ R,
{]a, ∞], [−∞, b[ : a, b ∈ R} ebenfalls.
(iv) Seien (Xi , Ti ) für i = 1, . . . , n topologische Räume und seien πi :
X1 × . . . × Xn → Xi definiert durch
πi (p1 , . . . , pn ) := pi für (p1 , . . . , pn ) ∈ X1 × . . . × Xn ,
dann ist ∪ni=1 {πi−1 (Oi ) : Oi ∈ Ti } ein Erzeugendensystem der Produkttopologie über X1 × . . . × Xn .
Beweis. (i) Es ist S := {Uε (p) : p ∈ X, ε ∈ R+ } ⊂ T (d) (benutze 33.14) und
somit gilt:
T (S) ⊂ T (d).
Ist umgekehrt O ∈ T (d), so gibt es für jedes p ∈ O ein ε(p) ∈ R+ mit Uε(p) ⊂ O.
Dann ist O = ∪p∈O Uε(p) (p) ∈ T (S).
(ii) Wir wenden (i) auf die kanonische Metrik von R an. Dann ist
{]p − ε, p + ε[: p ∈ R, ε ∈ R+ }
ein Erzeugendensystem der kanonischen Topologie T . Da jedes ]p − ε, p + ε[ ein
Intervall der Form ]a, b[ mit a, b ∈ R, a < b ist und umgekehrt ]a, b[=]p − ε, p + ε[
b−a
mit p = a+b
2 und ε = 2 ist, folgt der erste Teil von (ii).
Da S := {]a, ∞[, ] − ∞, b[ : a, b ∈ R} ⊂ T ist, reicht es T ⊂ T (S) zu zeigen.
Zunächst gilt für a, b ∈ R mit a < b
]a, b[=]a, ∞[∩] − ∞, b[∈ T (S).
Also folgt nach dem eben bewiesenen Teil auch T ⊂ T (S).
b und ε ∈ R+ (siehe 13.4(vi)). Setzt
(iii) Es sind Uε (p) ∈ Tb für alle p ∈ R
b ε ∈ R+ }, so ist also S ⊂ Tb und daher T (S) ⊂ Tb .
man S := {Uε (p) : p ∈ R,
Wie in (i) folgt nun (benutze Definition 13.3(i) für O ∈ Tb ), daß jedes O ∈ Tb
Vereinigung von Mengen von S ist. Somit ist auch Tb ⊂ T (S).
Setze S1 := {]a, ∞], [−∞, b[, a, b ∈ R}. Dann gilt S1 ⊂ Tb (benutze Definition 13.3(i)) und somit auch T (S1 ) ⊂ Tb . Umgekehrt ist S ⊂ T (S1 ) wegen
Uε (−∞), Uε (∞) ∈ S1 und Uε (p) =]p − ε, p + ε[=]p − ε, ∞] ∩ [−∞, p + ε[∈ T (S1 )
für p ∈ R. Also gilt auch Tb = T (S) ⊂ T (S1 ).
(iv) Nach Definition von πi gilt:
πi−1 (Oi ) = X1 × . . . × Xi−1 × Oi × Xi+1 × . . . × Xn
[36]–34
C1
Topologische Räume, Stetigkeit und Konvergenz von Funktionen
und somit ist
(1)
∩ni=1 πi−1 (Oi ) = O1 × . . . × Oi−1 × Oi × Oi+1 × . . . × On .
Setzt man S 0 := ∪ni=1 {πi−1 (Oi ) : Oi ∈ Ti } und S := {∩ni=1 πi−1 (Oi ) : Oi ∈ Ti },
so gilt S 0 ⊂ S (beachte πi−1 (Oi ) = X1 × . . . × Xi−1 × Oi × Xi+1 × . . . × Xn =
∩nj=1 πj−1 (Oj ) mit Oj = Xj für j 6= i) und T (S) ist wegen (1) die Produkttopologie (siehe 36.53(i)).
Nun ist T (S 0 ) ⊂ T (S) und S ⊂ T (S 0 ), also auch T (S) ⊂ T (S 0 ). Somit ist
T (S 0 ) = T (S), d.h. S 0 erzeugt die Produkttopologie.
Für den Fall Xi := R hatten wir die Projektionsabbildungen vom Rn in R mit
xi bezeichnet.
36.57 Beschreibung der Produkttopologie über X1 × . . . × Xn
durch Projektionen
Seien (Xi , Ti ) topologische Räume für i = 1, . . . , n.
Dann ist die Produkttopologie über X1 × . . . × Xn die kleinste Topologie,
bzgl. derer die Projektionsabbildungen π1 , . . . , πn stetig sind.
Beweis. Sei T die Produkttopologie, dann ist zu zeigen:
(1)
πi ist T , Ti -stetig für jedes i = 1, . . . , n.
(2)
Ist jedes πi T 0 , Ti -stetig bzgl. einer Topologie T 0 über X1 × . . . × Xn ,
dann ist T ⊂ T 0 .
Zu (1): Sei Oi ∈ Ti . Dann ist πi−1 (Oi ) = X1 ×. . .×Xi−1 ×Oi ×Xi+1 ×. . .×Xn ∈ T .
Daher ist πi T , Ti -stetig (siehe 36.13).
Zu (2): Nach 36.56(iv) genügt es für T ⊂ T 0 zu zeigen, daß gilt:
πi−1 (Oi ) ∈ T 0 für Oi ∈ Ti .
Dies folgt aber aus der T 0 , Ti -Stetigkeit von πi .
36.58 Stetigkeit für Abbildungen in einen Produktraum bedeutet Stetigkeit der Komponentenfunktionen
Seien (X, T ) und (Xi , Ti ) für i = 1, . . . , n topologische Räume. Dann ist
die Abbildung
f = (f1 , . . . , fn ) : X → X1 × . . . × Xn
genau dann bzgl. T und der Produkttopologie über X1 × . . . × Xn stetig,
wenn alle fi T , Ti -stetig sind.
Beweis. ⇒“ Es ist fi = πi ◦ f, und somit ist fi , als Komposition der nach
”
36.57 stetigen Funktion πi mit der nach Voraussetzung stetigen Funktion f,
stetig.
⇐“ Da S2 := ∪ni=1 {πi−1 (Oi ) für Oi ∈ Ti } ein Erzeugendensystem für die Pro”
dukttopologie ist (siehe 36.56(iv)), reicht es nach 36.55 zu zeigen:
f −1 (πi−1 (Oi )) ∈ T für Oi ∈ Ti .
C1
[36]–35
Kapitel VIII
Normierte, metrische und topologische Räume
Dies folgt aus der Stetigkeit von fi wegen
f −1 (πi−1 (Oi )) = (πi ◦ f )−1 (Oi ) = fi−1 (Oi ).
Betrachtet man für i = 1, . . . , n normierte Räume (V, k ki ) mit der zugehörigen
Topologie T (k ki ), so läßt sich die Produkttopologie für V1 × . . . × Vn mit Hilfe
einer Norm über V1 × . . . × Vn erzeugen. Insbesondere erweist sich die von
irgendeiner Norm herrührende Topologie des Rn als Produkttopologie.
36.59 Ein endliches Produkt von normierten Räumen ist ein
normierter Raum
(i) Seien (Vi , k ki ) für i = 1, ..., n normierte Räume. Dann ist V1 ×. . .×Vn
nach linearer Algebra ein R-linearer Raum, der vermöge
k(v1 , . . . , vn )k := kv1 k1 + . . . + kvn kn
zu einem normierten Raum wird. Seine Topologie T (k k) ist die
Produkttopologie der T (k ki ), i = 1, . . . , n.
(ii) Betrachtet man (Rn , T (k k)), wobei k k irgendeine Norm für den Rn
ist, so ist (Rn , T (k k)) der topologische Produktraum der (R, T ),
wobei T die kanonische Topologie von R bezeichne.
Beweis. (i) Wir zeigen als erstes, k k ist eine Norm für V1 × . . . × Vn .
k(v1 , . . . , vn )k = 0 ⇐⇒ kvi ki = 0 für i = 1, . . . , n ⇐⇒ vi = 0 für i = 1, . . . , n
⇐⇒ (v1 , . . . , vn ) = (0, . . . , 0).
Ferner gilt:
kλ(v1 , . . . , vn )k = k(λv1 , . . . , λvn )k = kλv1 k1 + . . . + kλvn kn
= |λ| kv1 k1 + . . . + |λ| kvn kn = |λ| k(v1 , . . . , vn )k, sowie
k(v1 , . . . , vn ) + (w1 , . . . , wn )k = k(v1 + w1 , . . . , vn + wn )k
= kv1 + w1 k1 + . . . + kvn + wn kn ≤ kv1 k1 + kw1 k1 + . . . + kvn kn + kwn kn
= k(v1 , . . . , vn )k + k(w1 , . . . , wn )k.
Also ist (V1 × . . . × Vn , k k) ein normierter Raum. Es bleibt zu zeigen:
T (k k) ist die Produkttopologie von T (k ki ) für i = 1, . . . , n.
Sei hierzu zunächst O ∈ T (k k) und p = (p1 , . . . , pn ) ∈ O. Dann gibt es ein ε ∈ R+
mit Uε (p) ⊂ O. Wegen Uε (p) ⊃ Uε (p1 ) × . . . × Uε (pn ) mit Uε (pi ) := {qi ∈ Vi :
kqi − pi ki < ε/n} gilt Uε (p1 ) × . . . × Uε (pn ) ⊂ Uε (p) ⊂ O mit T (k ki )-offenen
Mengen Uε (pi ). Also ist O offen bzgl. der Produkttopologie (siehe 36.53(ii)).
Ist umgekehrt O offen bzgl. der Produkttopologie und p = (p1 , . . . , pn ) ∈ O,
so gibt es Oi ∈ T (k ki ) mit pi ∈ Oi und O1 × . . . × On ⊂ O. Da Oi ∈ T (k ki )
und pi ∈ Oi für i = 1, . . . , n sind, gibt es εi ∈ R+ mit Uεi (pi ) ⊂ Oi . Setze
ε := min(ε1 , . . . , εn ), dann ist
Uε (p) ⊂ Uε1 (p1 ) × . . . × Uεn (pn ) ⊂ O1 × . . . × On ⊂ O.
Also ist O ∈ T (k k).
[36]–36
C1
Topologische Räume, Stetigkeit und Konvergenz von Funktionen
(ii) Da alle Normen dieselbe Topologie für den Rn liefern, können wir annehmen, daß die Norm k k für den Rn gegeben ist durch
k(v1 , . . . , vn )k = |v1 | + . . . + |vn |.
Da T die durch den Betrag | | (gleich Norm) gegebene kanonische Topologie ist,
folgt (ii) aus (i).
Die Topologie eines Raumes rührt nicht immer von einer Metrik oder Pseudometrik her. Topologien, für die dies gilt, erhalten einen besonderen Namen:
36.60 Pseudometrisierbarkeit und Metrisierbarkeit
Sei (X, T ) ein topologischer Raum. (X, T ) oder auch T heißt pseudometrisierbar (bzw. metrisierbar ), wenn es eine Pseudometrik d (bzw. eine
Metrik d) für X gibt mit
T (d) = T .
b
Wir wollen im folgenden insbesondere nachweisen, daß die Topologie Tb von R
metrisierbar ist. Der nächste Satz zeigt zunächst, wie eine injektive Abbildung
f : X → R zur Konstruktion einer Metrik d(f ) verwendet werden kann. Hierbei
erweist sich dann T (d(f ) ) als die kleinste Topologie, bzgl. der f T (d(f ) ), TR -stetig ist.
36.61 Die von einer reellwertigen Funktion erzeugte Topologie
ist pseudometrisierbar
Seien eine beliebige nicht-leere Menge X und f : X → R gegeben. Setze
d(f ) (p, q) := |f (p) − f (q)|
und bezeichne mit T die kanonische Topologie von R. Dann ist:
(i)
(X, d(f ) ) ein pseudometrischer Raum.
(ii)
Ist f injektiv, so ist (X, d(f ) ) ein metrischer Raum.
(iii)
T (d(f ) ) ist die kleinste Topologie T 0 , bzgl. derer f T 0 , T -stetig
ist.
(iv)
T (d(f ) ) = {f −1 (O) : O ∈ T }.
Beweis. (i) Wir weisen die drei Rechenregeln für eine Pseudometrik nach
(siehe 33.6):
d(f ) (p, p) = |f (p) − f (p)| = 0,
d(f ) (p, q) = |f (p) − f (q)| = |f (q) − f (p)| = d(f ) (q, p),
d(f ) (p, r) = |f (p) − f (r)| ≤ |f (p) − f (q)|+|f (q) − f (r)| = d(f ) (p, q)+d(f ) (q, r).
(ii) Zu zeigen bleibt wegen (i): d(f ) (p, q) = 0 ⇒ p = q. Nun gilt:
0 = d(f ) (p, q) = |f (p) − f (q)| ⇒ f (p) = f (q) ⇒ p = q.
f inj.
C1
[36]–37
Kapitel VIII
Normierte, metrische und topologische Räume
(iii),(iv) Wir zeigen zunächst: f ist T (d(f ) ), T -stetig; d.h.
(pn → p bzgl. T (d(f ) )) ⇒ f (pn ) → f (p).
Da pn → p gleichbedeutend mit d(f ) (pn , p) = |f (pn ) − f (p)| → 0 ist, ist dies
trivial.
Nach 36.54(ii) ist
{f −1 (O) : O offen in R} die kleinste Topologie T 0 ,
bzgl. derer f T 0 , T -stetig ist. Also gilt:
Zum Nachweis von
{f −1 (O) : O ∈ T } ⊂ T (d(f ) ).
T (d(f ) ) ⊂ {f −1 (O) : O ∈ T }
und damit von (iii) und (iv), reicht es zu zeigen (siehe 36.56(i)), daß für p ∈ X,
ε ∈ R+ gilt:
Uε (p) ∈ {f −1 (O) : O ∈ T }.
Dies folgt wegen
Uε (p) = {q ∈ X : d(f ) (q, p) < ε} = {q ∈ X : |f (q) − f (p)| < ε}
= {q ∈ X : f (q) ∈]f (p) − ε, f (p) + ε[} = f −1 (]f (p) − ε, f (p) + ε[)
= f −1 (O)
mit O := ]f (p) − ε, f (p) + ε[∈ T .
b ist metrisierbar
36.62 Die Topologie Tb von R
Setze f (−∞) := − π2 , f (∞) := π2 und f (t) := arctan(t) für t ∈ R. Dann
b d.h. es gilt T (d(f ) ) = Tb .
metrisiert d(f ) die Topologie R,
Beweis. Es ist arctan eine bijektive Abbildung von R auf ] − π2 , π2 [ (siehe
b auf [− π , π ]. Nach 36.61
22.8(iii)). Daher ist f eine bijektive Abbildung von R
2 2
(f
)
ist daher (X, d ) ein metrischer Raum und
(1)
T (d(f ) ) = {f −1 (O) : O ∈ T }
ist die kleinste Topologie T 0 , bzgl. derer f T 0 , T stetig ist (siehe 36.61(iii), (iv)).
Zu zeigen bleibt
(2)
T (d(f ) ) ⊂ Tb ,
(3)
Tb ⊂ T (d(f ) ).
Zu (2): Es reicht zu zeigen, f ist Tb , T -stetig. Da f |R = arctan in jedem Punkt
p ∈ R T , T -stetig ist, T = (Tb )R und R ∈ Tb gilt, ist f in jedem Punkt
13.4(iv)
13.4(v)
p ∈ R auch Tb , T stetig (siehe 36.15(ii)), f ist aber auch in −∞ und ∞ stetig.
Denn zu ε ∈ R+ gibt es offensichtlich ein δ ∈ R+ mit
f (Uδ (−∞)) ⊂] − π2 − ε, − π2 + ε[ und f (Uδ (∞)) ⊂] π2 − ε, π2 + ε[,
wobei Uδ (−∞), Uδ (∞) ∈ Tb sind.
[36]–38
C1
Topologische Räume, Stetigkeit und Konvergenz von Funktionen
Zu (3): Zu zeigen reicht (siehe 36.56(iii))
(5)
]a, ∞], [−∞, b[∈ T (d(f ) ).
Man zeigt leicht, da f streng monoton wachsend ist:
(6)
]a, ∞] = f −1 (]f (a), ∞[)
(7)
[−∞, b[= f −1 (] − ∞, f (b)[).
Aus (6), (7) und (1) folgt daher (5).
Wir verallgemeinern nun den Begriff der Konvergenz einer Funktion f : D → R.
b und X2 := R,
b so zeigt 16.2(iii), daß 36.63(i) den dort gegeSetzt man X1 := R
b a0 ∈ R
b
benen Konvergenzbegriff reellwertiger Funktionen für beliebige t0 ∈ R,
als Spezialfall enthält. Man beachte, daß die Umgebungen von t0 und u0 in
b aufzufassen sind.
16.2(iii) als Umgebungen in R
36.63 Konvergenz von Funktionen
Sei (X1 , T1 ) ein topologischer und (X2 , T2 ) ein Hausdorff-Raum. Seien
D ⊂ X1 und f : D → X2 . Dann heißt q0 Grenzwert der Funktion f in p0 ,
wenn p0 Berührungspunkt von D ist, und eine der beiden äquivalenten
Bedingungen gilt:
(i) Für jede Umgebung U2 von q0 gibt es eine Umgebung U1 von p0
mit
f (U1 ∩ D) ⊂ U2 .
(ii) Setzt man f (p) := f (p) für p ∈ D und f (p0 ) := q0 , so sind
f : D ∪ {p0 } → X2 eindeutig definiert und stetig in p0 .
Besitzt f in p0 den Grenzwert q0 , so schreibt man auch
limp→p0 f (p) = q0 oder f (p) → q0 für p → p0 .
Der Grenzwert ist, wenn er existiert, eindeutig bestimmt.
Beweis. Wir zeigen zunächst, es gibt höchstens ein q0 , welches (i) erfüllt.
Sei indirekt q00 6= q0 ein weiterer Punkt, für den (i) gilt. Wähle Umgebungen
O(q00 ), O(q0 ) ∈ T2 von q00 bzw. q0 mit O(q00 ) ∩ O(q0 ) = ∅. Dies ist möglich, da
(X2 , T2 ) hausdorffsch ist. Nun gibt es nach (i) Umgebungen U10 und U1 von p0
mit
f (U10 ∩ D) ⊂ O(q00 ), f (U1 ∩ D) ⊂ O(q0 ).
Dann gilt f (U10 ∩ U1 ∩ D) ⊂ O(q00 ) ∩ O(q0 ) = ∅ und somit U10 ∩ U1 ∩ D = ∅. Dies
ist ein Widerspruch, da sowohl U10 ∩ U1 ∈ (T1 )p0 als auch p0 Berührungspunkt
von D ist.
Sei für die Äquivalenz von (i) und (ii) zunächst p0 6∈ D angenommen. Dann
ist f eindeutig definiert und wegen f (p0 ) = q0 sowie f |D = f auch (i) mit (ii)
äquivalent.
Sei nun p0 ∈ D: Für (i)⇒(ii) ist nur f (p0 ) = q0 zu zeigen. Wäre f (p0 ) 6= q0 ,
so gibt es O0 (f (p0 )), O(q0 ) ∈ T2 mit
(1)
O0 (f (p0 )) ∩ O(q0 ) = ∅.
C1
[36]–39
Kapitel VIII
Normierte, metrische und topologische Räume
Sei zu O(q0 ) gemäß (i) ein U1 ∈ (T1 )p0 gewählt mit f (U1 ∩ D) ⊂ O(q0 ). Wegen
f (p0 ) ∈ f (U1 ∩ D) ⊂ O(q0 ) und f (p0 ) ∈ O0 (f (p0 )) ergibt sich ein Widerspruch
zu (1).
(ii) ⇒(i) , da wegen der eindeutigen Definiertheit von f gilt: q0 = f (p0 ) und
f = f.
Aufgrund der Zurückführung des Konvergenzbegriffs auf den Stetigkeitsbegriff,
lassen sich viele Aussagen über stetige Funktionen in Aussagen über die Konvergenz von Funktionen umschreiben. Allerdings ist es oft übersichtlicher, diese
umgeschriebenen Aussagen noch einmal zu beweisen, als den Beweis auf die
entsprechende Aussage über stetige Funktionen zurückzuführen.
36.64 Kriterien für die Konvergenz von Funktionen in metrischen Räumen
Seien (X1 , d1 ) ein pseudometrischer und (X2 , d2 ) ein metrischer Raum.
Seien D ⊂ X1 und p0 Berührungspunkt von D. Sei f : D → X2 . Dann
sind äquivalent:
(i)
limp→p0 f (p) = q0 .
(ii) (∀ε ∈ R+ )(∃δ ∈ R+ ), so daß für alle p ∈ D gilt:
p ∈ Uδ (p0 ) ⇒ f (p) ∈ Uε (q0 ).
(iii) Für jede Folge (pn )n∈N in D mit pn → p0 gilt: limn→∞ f (pn ) = q0 .
Beweis. (Siehe den Beweis für die stetigen Funktionen in 33.34).
(i)⇒(iii) Sei U2 eine Umgebung von q0 . Ist (pn )n∈N eine Folge aus D mit
pn → p0 , so ist zu zeigen
(1)
f (pn ) ∈ U2 für fast alle n.
Nach (i) gibt es nun zu U2 eine Umgebung U1 von p0 mit
(2)
f (U1 ∩ D) ⊂ U2 .
Wegen pn → p0 liegen fast alle pn in U1 , also auch in U1 ∩ D. Aus (2) folgt
daher, daß fast alle f (pn ) in U2 liegen, d.h. es gilt (1).
(iii)⇒(ii) Angenommen, (ii) sei nicht wahr. Dann gibt es ein ε ∈ R+ , so daß
für jedes δ ∈ R+ ein p ∈ D existiert mit d1 (p, p0 ) < δ und d2 (f (p), q0 ) ≥ ε.
Insbesondere gibt es für jedes n ∈ N ein pn ∈ D mit d1 (pn , p0 ) < 1/n und
d2 (f (pn ), q0 ) ≥ ε. Dann gilt pn → p0 und nach (iii) müßte gelten f (pn ) → q0
im Widerspruch zu d2 (f (pn ), q0 ) ≥ ε für alle n ∈ N.
(ii)⇒(i) Sei U2 eine Umgebung von q0 . Dann gibt es ein ε ∈ R+ mit Uε (q0 ) ⊂
U2 . Nach (ii) gibt es dann ein δ ∈ R+ mit f (Uδ (p0 ) ∩ D) ⊂ Uε (q0 ). Da Uδ (p0 )
eine Umgebung von p0 in (X1 , d1 ) ist, folgt hieraus (i).
[36]–40
C1
Topologische Räume, Stetigkeit und Konvergenz von Funktionen
36.65 Rechenregeln für die Konvergenz von vektorwertigen
Funktionen
Seien (X, d) ein pseudometrischer Raum, D, E ⊂ X und (W, k k) ein
normierter Raum. Es seien f : D → W, g : E → W und h : E → R
Funktionen mit
f (p) → q0 ∈ W, g(p) → r0 ∈ W und h(p) → s0 ∈ R für p → p0 .
Sei p0 ein Berührungspunkt von D ∩ E, dann gilt für die folgenden (in
(i)–(iii) über D ∩ E) punktweise definierten Funktionen
(i)
(ii)
(iii)
(iv)
(f + g)(p) → q0 + r0 für p → p0 .
(f − g)(p) → q0 − r0 für p → p0 .
(h · g)(p) → s0 · r0 für p → p0 .
kf k(p) → kq0 k für p → p0 .
Beweis. Wir führen den Beweis wie in 16.9. Sei (pn )n∈N eine Folge in D ∩ E
(bzw. D in(iv)), die gegen p0 konvergiert. Nach 36.64(iii) gilt dann
Hieraus folgt
f (pn ) → q0 , g(pn ) → r0 , h(pn ) → s0 .
(f + g)(pn ) = f (pn ) + g(pn ) → q0 + r0 nach 33.22(ii).
(1)
(f − g)(pn ) = f (pn ) − g(pn ) → q0 − r0 nach 33.22(iii).
(2)
(h g)(pn ) = h(pn )g(pn ) → s0 r0 nach 33.22(iv).
(3)
kf (pn )k → kq0 k nach 33.22(v).
(4)
Aus (1)–(4) ergibt sich (i)–(iv).
36.66
Konvergenz von Funktionen mit Werten in einem endlich-dimensionalen Vektorraum
Seien (X, d) ein pseudometrischer und W ein m-dimensionaler R-Vektorraum mit m ∈ N. Seien (w1 , . . . , wm ) eine beliebige
Pm Basis von W und
D ⊂ X sowie f : D → W. Dann gilt f =
i=1 fi wi mit eindeutig
bestimmten Funktionen fi : D → R, und es sind äquivalent:
(i)
f (p) → q0 für p → p0 .
(l ◦ f )(p) → l(q0 ) für p → p0 und jede R-lineare Abbildung
l : W → R.
P
(iii) fi (p) → q0i für p → p0 und i = 1, . . . , m, mit q0 = m
i=1 q0i wi .
(ii)
Beweis. (Siehe den Beweis für die stetigen Funktionen in 34.15).
(i)⇒(ii) Sei pn ∈ D mit pn → p0 gegeben. Dann gilt f (pn ) → q0 und daher
(l ◦ f )(pn ) = l(f (pn )) → l(q0 ), da l : W → R nach 34.12 stetig ist. Also besitzt
l ◦ f in p0 den Grenzwert l(q0 ).
C1
[36]–41
Kapitel VIII
Normierte, metrische und topologische Räume
(ii)⇒(iii) Betrachte für festes j ∈ {1, . . . , m} die nach linearer Algebra I
existierende lineare Abbildung l, die definiert ist durch
l(wi ) = δij für i = 1, . . . , m.
Dann ist fj = l ◦ f und besitzt daher nach (ii) den Grenzwert l(q0 ) = q0j .
(iii)⇒(i) Zunächst besitze fi (p)wi in p0 den Grenzwert q0i wi nach 36.65(iii).
Die Behauptung ergibt sich dann aus 36.65(i).
Literatur zu diesem Kapitel:
¦ Kapitel XIV und XIX des Lehrbuch der Analysis, Teil II (8. Auflage 1993)
von H. Heuser.
Insbesondere zur Topologie die drei ausführlichen und studentenfreundlich geschriebenen Bücher:
¦ W. Franz, Topologie I, Allgemeine Topologie, Sammlung Göschen [relevant
für die hier betrachteten Fragestellungen sind in etwa die ersten 100 Seiten].
¦ H. Schubert, Topologie, B.G. Teubner (4. Auflage 1975) [relevant für die hier
betrachteten Fragestellungen sind in etwa die ersten 60 Seiten].
¦ G. Preuß, Allgemeine Topologie, Springer Verlag, Hochschultext (2. Auflage
1975).
Das Buch von
¦ Jänich, Topologie, Springer Verlag, Lehrbuch (4. Auflage 1994)
ist in sehr anregender Form geschrieben und gibt viele Bereiche der Mathematik
an, in der die Topologie nutzbringend verwendet werden kann. Es enthält 182
Figuren, die die angegebenen Begriffe und Konstruktionen verdeutlichen. Viele
Beweise sind jedoch nur sehr knapp dargestellt oder werden ganz dem Leser
überlassen.
Das Buch von
¦ L. A. Steen und J. A. Seebach Jr., Counterexamples in Topology, Springer
Verlag (2. Auflage 1978)
gibt 143 ausführlich beschriebene Beispiele für topologische Räume an, die gewisse Eigenschaften besitzen bzw. nicht besitzen. Am Schluß des Buches findet
man eine Reference Chart“, d.h. eine große Tabelle, in der für jedes dieser
”
Beispiele und für jede von 61 topologischen Eigenschaften zu erkennen ist, ob
das Beispiel diese Eigenschaft hat oder nicht.
[36]–42
C1