IV Eigenwerte und Lineare DGL-Systeme IV.1. Eigenwerte und
Werbung

21.1
IV
Eigenwerte und
Lineare DGL-Systeme
IV.1. Eigenwerte und
Eigenvektoren,
charakteristisches
Polynom
Ein Eigenvektor einer quadratischen
Matrix A ist ein vom Nullvektor
verschiedener Vektor v, so dass Av
und v parallel sind. Ein Eigenvektor
wird also nur gestreckt, wenn man ihn
mit A multipliziert und man bezeichnet
den Streckungsfaktor als Eigenwert
der Matrix.
21.2
Eigenwerte und Eigenvektoren
Sei A eine quadratische Matrix.
Def Eine Zahl l heisst ein
Eigenwert (oder "E-Wert")
von A, falls es einen Vektor
v = 0 gibt, so dass
A v = lv
gilt.
v und Av sind parallel
Der Vektor v heisst dann
Eigenvektor ("E-Vek") zu l.
Eigenvektoren dürfen nicht Null sein, da
A 0 = l 0 trivial ist und somit nichts aussagt.
21.3
Eigenwerte und Eigenvektoren
A v =lv
v = 0 ist
ein E-Vek
l ist ein
E-Wert
der quadratischen Matrix A
<=>
<=>
<=>
Av - l v = 0
(A- l En ) v = 0
v ist im Nullraum
der Matrix A- lE n .
PLAN:
1 Bestimmung der Eigenwerte
2 Bestimmung der Eigenvektoren
3 Anwendungen
1
21.4
Bestimmung der Eigenwerte:
Die E-Werte von A sind die
Zahlen l , so dass die Gleichung
A v - lv = 0
(A - l E n) v
nicht triviale Lösungen besitzt, also
genau die Zahlen, so dass die Matrix
A - l E n nicht invertierbar ist,
also genau die Zahlen l , so dass
det ( A - l E n) = 0.
Diese Gleichung heisst die
charakteristische Gleichung von A.
21.5
Def Das charakteristische
Polynom der nxn Matrix A
ist
pA( l ) = det ( A - l E n).
Es ist ein Polynom n-ten Grades.
Fazit:
Die E-Werte einer Matrix
sind die Nullstellen ihres
charakteristischen Polynoms.
Wir bestimmen die E-Werte einer
Matrix, indem wir die Nullstellen
ihres charakteristischen Polynoms
bestimmen.
21.6
Wie viele und was für Nullstellen hat pA (l )?
Gemäss dem Fundamentalsatz der Algebra
hat pA( l ) n Nullstellen, die reelle oder
komplexe Zahlen sind und nicht notwendigerweise verschieden sind (wir berücksichtigen
ihre Vielfachheit).
Es folgt, dass jede n-reihige
Matrix A genau n (reelle oder
komplexe) Eigenwerte besitzt,
l 1, l 2 ,..., l n,
wobei mehrfache Eigenwerte
entsprechend oft berücksichtigt
werden.
21.7
Bsp A = 1 2
4 3
Was sind die E-Werte?
pA ( l ) = det (A-l E2 )
= det 1-l
2
4
3- l
= (1- l )(3-l )-2 4
= l² - 4 l - 5
Die Nullstellen des char.
Polynoms sind:
l² - 4 l - 5 = 0
<=> l = -1 oder l = 5.
Mitternachtsformel
E-Werte: -1 und 5.
Bsp A =
1
1
1
Was sind
21.8
0 -2
3
1
0
4
die E-Werte?
pA ( l ) = det
1- l 0
-2
1
3- l
1
1
0
4- l
= (3- l) det 1- l -2
Laplacesche Entwicklung
1
4- l
nach der 2. Spalte
= (3- l) ( l²-5 l+6)
Nullstellen: 2 & 3
= (3- l)² (2- l)
Die E-Werte sind 2 und 3.
einfacher
E-Wert
doppelter
E-Wert
21.9
Eigenwerte einer Dreiecksmatrix
Ist A eine (obere oder untere)
Dreiecksmatrix, so sind ihre E-Werte
gleich den Hauptdiagonalelmente,
da die Determinante einer Dreiecksmatrix gleich dem Produkt der
Hauptdiagonalelemente ist.
Bsp A =
1 -9 57 33
0
2 0.1
7
0
0
3
0
0
0
0
4
pA ( l ) = det 1- l -9
57
33
0 2- l 0.1
7
0
0
3- l 0
0
0
0
4- l
= (1- l )(2- l )(3- l)(4- l)
=> Die E-Werte sind 1, 2, 3, 4.
Spur
21.10
Def Die Spur ("trace") der
n-reihigen Matrix A ist
die Summe ihrer Hauptdiagonalenelemente:
Sp A = a 11 + a 22 + ... + a nn
Bsp
A = 1 2 3
4 5 6
7 8 9
Sp A = 1 + 5 + 9 = 15
21.11
Eigenschaften der Eigenwerte
Satz:
Sp A = l 1+ l 2+ ... + l n
Summe aller E-Werte
Spur
det A = l 1 l 2 ... l n
Produkt aller E-Werte
Determinante
Beweis:
Vergleiche die zwei folgenden
Schreibweisen des
charakteristischen Polynoms.
21.12
Einerseits ist das
charakteristische Polynom
gleich
p ( l) = det ( A - l E n ) =
A
= det a11-l a 12 ... a 1n
a21 a 22-l ... a 2n
:
:
:
a n1 a n2 ... a nn- l
n
= (- l ) + Sp A (- l )
...+ det A
n-1
+...
Andererseits ist das
charak. Polynom gleich
21.13
p ( l) =
A
= ( l1- l) ( l2- l) ... ( l-n l)
wobei
l 1, l 2,..., l n
die Nullstellen / E-Werte sind
n
= (- l ) +( l+...+ ln)(- l)
1
+ ... + l l2 ... l n
n-1
1
Es folgt, dass
Sp A = l 1+ l 2+ ... + l n
det A = l 1 l 2 ... l n
=>
Eine Matrix A ist genau dann
invertierbar (d.h. det A = 0),
wenn 0 kein E-Wert von A ist!
Invertierbarkeit
21.14
Zusammenfassung - Teil 2
Die folgenden Behauptungen über
eine nxn Matrix A sind äquivalent:
A ist invertierbar
T
<=> A
<=> das
ist invertierbar
Gauss-Verf. auf A angewendet
liefert dreieckige Stufenformen mit
nicht verschwindenen Diagonalelementen
<=> A hat Rang n
n-Basis
die
Spalten
von
A
bilden
eine
R
<=>
<=> die Spalten von A sind lin. unabhängig
<=> der Nullvektor ist die einzige Lösung
der homogenen Gleichung Ax=0
<=> 0 ist kein Eigenwert von A
21.15
2 Bestimmung der Eigenvektoren:
Für jeden E-Wert l sind die
entsprechenden E-Vek die
Vektoren v = 0 in
Eig l = ker ( A - l E n ).
heisst der
l-
Eigenraum von A
Zur Erinnerung: ker(B) kennzeichnet die
Lösungsmenge der Gleichung B v = 0
und heisst Nullraum oder Kern von B.
Um die l - Eigenvektoren zu
bestimmen, lösen wir die
Gleichung ( A - l E n ) v = 0
mittels des Gauss-Verfahrens.
21.16
Bsp A = 1 2
4 3
Die E-Werte sind -1 & 5
(siehe früher).
Bestimmung der E-Vek:
E-Vek zu l1 = -1:
A-(-1)E2 = 1+1
2
4
3+1
= 2 2
1 1
4 4
0 0
=> Eig l1 = span 1
-1
v1 = 1 ist ein E-Vek
-1
zu l1 = -1.
21.17
E-Vek zu l2 = 5:
A-5E = 1-5
2
4
3-5
-1
= -4 2
1 2
4 -2
0 0
=> Eig l = span 1
2
2
v2 = 1
ist ein E-Vek
2
zu l2 = 5.
Bmk: Alle anderen E-Vek von A
sind Vielfache von v 1 oder v 2 .
Ziel:
Bestimme so viele linear unabhängige
Eigenvektoren wie möglich.
21.18
Bsp A = 5 -3
3 -1
Bestimme:
1 die E-Werte von A und
2 die E-Vek von A.
1 pA (l ) = det (A-l E2 )
= det 5-l
-3
3
-1-l
= (5- l )(-1-l ) + 9
= l²-4l +4
= ( l²-2)²
Daher ist l =2 der
einzige E-Wert von A.
21.19
2 Die E-Vek zu l =2 sind
die nicht Null Vektoren im
Kern der Matrix
A-2E2 = 5-2
-3
3
-1-2
=
3
-3
3
-3
Das Gauss-Verfahren liefert
die Stufenform
1 -1 .
0 0
Die E-Vek von A sind daher
die Vektoren von der Form
k 1 mit k=0.
1
21.20
Satz
E-Vek zu verschiedenen
E-Werten sind stets
linear unabhängig.
Beweis im Sonderfall von 3 Vektoren:
Der Beweis für beliebige Anzahl Vektoren ist ähnlich.
Seien v k E-Vek zu l k, k=1,2,3, mit
l 1, l 2 , l 3 paarweise verschieden.
Sei c 1v 1+ c 2v 2+ c 3v = 0 und zeige,
3
dass alle c 1, c 2, c 3 null sein müssen.
Multipliziere beide Seiten der obigen
Gleichung von links mit A,
c1l v + c
11
v +
l
2 2 2
c
v =
l
3 33
0,
21.21
und subtrahiere die Gleichung
l1(c 1v 1+ c 2v 2+ c 3v 3) = 0.
Es ergibt:
0 + c 2( l2- l1)v 2+ c 3( l3- l1)v 3= 0.
Mit dieser Gleichung wiederhole die
obigen Schritte mit l2 anstatt l1.
Es ergibt:
c 3(
l3- l2)( l3- l1)
Da v3=0, l =l , &
3
2
l3= l1,
v =
0.
3
muss c 3= 0.
Durch Umnummerierung und mit gleichem Vorgehen kann das Verschwinden
von c und c gezeigt werden.
1
2
Eigenbasis
21.22
Def Eine Eigenbasis ("E-Basis")
für eine nxn Matrix A ist
n
eine Basis {v1 ,...,vn } von R
wobei
A v k = l k v k (k=1,...,n).
v1,...,v n sind E-Vek und
l 1,..., l n die entsprechenden E-Werte
Eine Eigenbasis existiert genau
dann, wenn A *n* linear unabhängige E-Vek v1 ,...,vn besitzt.
Bsp Eine E-Basis für A = 1 2
4 3
ist z.B. {v1= 1 ,v2= 1 }.
-1
2
21.23
IV
Eigenwerte und
Lineare DGL-Systeme
IV.2. Komplexe
Eigenwerte und
Eigenvektoren einer
reellen Matrix
Ist eine Matrix reell, so treten
komplexe Eigenwerte als Paare von
konjugiert komplexen Zahlen auf.
Ist v ein Eigenvektor zu einem
komplexen E-Wert, so ist v ein E-Vek
zum konjugiert komplexen E-Wert.
Eigenschaften der komplexen
E-Werte und E-Vektoren
21.24
Sei A eine nxn reelle Matrix.
Komplexe Eigenwerte treten
stets als Paare zueinander
konjugiert komplexer Zahlen auf.
Wieso? Weil bei reellen Polynomen komplexe
Nullstellen als Paare zueinander konjugiert
komplexer Zahlen auftreten; s. Seite 13.14.
Zu einem komplexen Eigenwert
gehören komplexe Eigenvektoren.
Wieso? Av ist reell, wenn A & v reell sind.
Sind l & l konjugiert komplexe
E-Werte, so treten entsprechende
E-Vek auch als Paare auf (v und v).
Wieso? Aus Av= lv folgt, dass Av= lv.
Bsp Sei
A =
21.25
0 -2 .
2 0
1 Das charakteristische
Polynom p A( l) = l²+4 besitzt
die Nullstellen 2i und -2i
(die zweiten Wurzeln von -4).
l1=2i und l2=-2i sind deshalb
die Eigenwerte dieser Matrix.
2 Der E-Raum zu l1=2i ist
ker -2i -2 = ker 1 -i .
2 -2i
0 0
Wir wählen den E-Vek v1 = i
1
zu l1=2i. Dann ist v2= v1= -i
1
ein E-Vek zu l2 =l1 = -2i.
Bsp Sei
A =
11 -15 .
6 -7
21.26
1 Eigenwerte
Das charakteristische Polynom,
pA( l) = l²-4 l +13, besitzt
die Nullstellen
l = 4 216-52 = 2 3i.
2+3i und 2-3i sind deshalb
die E-Werte dieser Matrix.
2
Eigenvektoren
Die E-Vek zu l1= 2+3i sind die
vom Nullvektor verschiedenen
Vektoren im folgenden Kern:
=Nullraum
21.27
ker (A-(2+3i)E) = ker 9-3i -15
6
-9-3i
Elem. Zeilenumformungen ergeben:
1
x
9-3i -15
3-i -5
3
6
Z1
6
-9-3i - 9-3i
0
0
Der Kernel wird vom folgenden
Vektor aufgespannt: v1 = 5
3-i
Die E-Vek zu l2 = l1 = 2-3i sind
dann die Vielfachen von
v2 = v1 = 5 .
3+i
21.28
Die Lineare Algebra darf (soll) mit
komplexen Zahlen durchgeführt werden.
Das Gauss-Verfahren für Systeme
linearer Gleichungen mit komplexen
Koeff. lässt die gleichen elementaren
Zeilenumformungen wie früher zu.
Die Berechnung der Determinante
einer n-reihigen Matrix mit komplexen
Komponenten erfolgt wie früher
(Laplace-Entwicklung oder Formeln).
Die Berechnung der Inversen einer
komplexen Matrix anhand des
Gauss-Verfahrens oder einer Formel
erfolgt wie früher.
Basis, Dimension, Eigenwerte,
Eigenvektoren, etc auch wie früher!
21.29
Bsp Löse das System
a + ib + (-1-i)c = 3-5i
2a -2ib + (-1-2i)c = 7-9i
Gauss-Verfahren:
1
i
-1-i
3-5i
2 -2i -1-2i 7-9i
1
i -1-i
3-5i
0 -4i
1
1+i
3
19i
1
0 - 4 -i 13
4 4
i
1+ 1 i
0
1
4 4
4
-2Z1
+1
Z
4 2
x 4i
c=t komplexer Parameter
Lösungen:
19i +t 3 +i ,t C
a = 13
4 4
4
i
1
1
b
-4+4i
-4
c
0
1
21.30
Bsp Ist die Matrix A= i -1-i
1
2+i
invertierbar? Falls ja, was
ist ihre Inverse?
det A = i (2+i) - 1 (-1-i)
= 3i = 0
Deshalb ist A invertierbar.
Aus der Formel
-1
1
d -b
a b
=
ad-bc
-c a
c d
1
folgt: A =
3i
-1
Bmk:
1 =- 1 i
3i
3
2+i 1+i
-1
i
1 2
1
1
= 3- 3 i 3- 3 i
1
1
i
3
3
21.31
Bsp Sei
A =
2i
1-i .
-2
1+i
-2+2i
2
a) Was ist der Rang von A?
b) Was ist die Dimension
des Kerns von A?
c) Bestimme eine Basis von
ker A.
a) Das Gauss-Verfahren
liefert:
2i
1-i
...
1 - 21 - 21 i
-2
1+i
0
0
-2+2i
2
0
0
Der Rang von A ist daher gleich 1.
21.32
b) Nach dem Rangsatz gilt
2 = dim N(A) + rang A.
Da rang A = 1, ist die
Dimension des Kerns von A
gleich 1.
c) Die Stufenform vom Teil
(a) zeigt eine Basis von
ker A:
1+ 1i
2
2
1
22.1
IV
Eigenwerte und
Lineare DGL-Systeme
IV.3. Diagonalisierung
einer Matrix
Diagonalmatrizen (bei denen alle
Elemente ausserhalb der Hauptdiagonale Null sind) sind am
einfachsten für die Berechnungen.
Die sogennanten diagonalisierbaren
Matrizen benehmen sich teilweise
noch wie Diagonalmatrizen.
Dazu wird eine Basis gebraucht,
die aus Eigenvektoren besteht.
Diagonalisierbarkeit
22.2
Def Eine quadratische Matrix
heisst diagonalisierbar,
wenn eine invertierbare
Matrix S und eine
Diagonalmatrix D
existieren, sodass
-1
A = S D S .
Satz A ist genau dann
diagonalisierbar, wenn
eine Eigenbasis für A
existiert.
Beweis Zur Erinnerung:
Eine Eigenbasis (E-Basis)
für eine nxn Matrix A ist
n
eine Basis von R , die
aus E-Vek von A besteht.
22.3
Sei {v1,...,v n} eine
E-Basis für A.
Seien l1,..., l n die
entsprechenden E-Werte:
A v k = lk v k .
Wir definieren
S =
v1 ... vn
und D = l1
0
0
ln
22.4
Die Matrix D ist anschaulich
eine Diagonalmatrix und die
Matrix S ist invertierbar, da
ihre Spalten eine Basis von
n
R bilden.
Wir brauchen also nur zu
bestätigen, dass A S = S D.
S D =
v1 ... vn
=
S
1v1 ... nvn
0
1
0
n
D
A S = A
22.5
v1 ... vn
S
=
Av1 ... Avn
Spalten-Sichtweise des
Produkts zweier Matrizen
=
1v1 ... nvn
Definition Eigenwert: Av= v
A S = S D
Und umgekehrt: ist A = S D S -1
, so sind die
S-Spalten E-Vek von A und die Diagonalelemente
von D die entsprechenden E-Werte.
Bsp A = 1 2
4 3
Siehe Berechnung von
E-Werte & E-Vek in
der früheren Vorlesung.
22.6
1
E-Werte:
l 1 = -1 und l2 = 5.
2
E-Vek:
v1 = 1 ist E-Vek
-1 zu l 1 = -1,
v2 = 1 ist E-Vek
2 zu l2 = 5.
22.7
Zur Erinnerung:
2 linear unabhängige Vektoren
in R2 bilden eine Basis von R 2.
v1 und v2 sind linear
unabhängige E-Vek von A.
Deshalb ist {v1 ,v2 } eine
Eigenbasis für A und A
ist diagonalisierbar:
-1
A = S D S , wobei
D= -1
0
0
5
& S= 1
-1
1
2
Die Reihenfolgen l1 ,l2 in D und
v1,v2 in S müssen übereinstimmen!
Check: A S = S D.
Bsp A = 5 -3
3 -1
1 E-Werte:
pA ( l )=det 5-l -3
3 -1-l
=...=(l -2)²
l =2 ist der einzige
E-Wert
(doppelter E-Wert).
2 E-Vek:
ker(A-2E2 )=ker 3 -3
3 -3
=span 1
1
22.8
v = 1 ist ein E-Vek.
1
Alle andere E-Vek sind
Vielfachen von v.
Insbesondere kann man
nicht zwei linear unabh.
E-Vek dieser A finden.
Deshalb gibt es keine
Eigenbasis für A und A
ist nicht diagonalisierbar!
22.9
Aber die meisten Matrizen sind
diagonalisierbar! Insbesondere sind
alle nxn Matrizen mit n verschiedenen
Eigenwerte diagonalisierbar.
Abklärung
22.10
In diesem Kurs betrachten wir:
- Matrix Potenzen *nur* für
diagonalisierbare Matrizen;
- DGL-Systeme in der Ebene
auch mit nicht-diagonalisierbaren
Koeffizientenmatrizen und
- DGL-Systeme in Dim > 3 *nur*
mit diagonalisierbaren Matrizen.
Die Lineare Algebra ermöglicht
jedoch auch die effiziente Behandlung auch von nicht-diagonalisierbaren Matrizen in alle Dimensionen
- siehe "Jordansche Normalform".
22.11
IV
Eigenwerte und
Lineare DGL-Systeme
IV.4. Matrixpotenzen,
diskretes
Entwicklungsmodell
Die direkte wiederholte Matrixmultiplikation einer Matrix mit sich
selbst A N = A A A ... A erfordert
einen hohen Rechenaufwand.
Um Matrixpotenzen effizient zu
berechnen, kommen Eigenwerte und
Eigenvektoren zum Einsatz.
22.12
3
Anwendungen der
Eigenwerte & Eigenvektoren
Hier:
Matrix Potenzieren
Nachher: Differentialgleichungen
Diskretes Entwicklungsmodell
Seien v(N)
n
R die Zustände eines
Systems zu den
Zeitpunkten N=0,1,2,...
diskrete Zeit:
Jahr/Minute/Woche/...
v0
n
R die Anfangsbedingung
d.h. der gegebene
Zustand am Anfang
22.13
v (N+1) = A v (N)
Nächster
Zustand
Vorheriger
Zustand
In jedem Schritt wird der
Zustand mit A multipliziert.
v (0) = v 0
Anfangsbedingung
besitzt die Lösung
N
v (N) = A v 0
Wie berechnet man A
N
?
Bsp
Ein Populationsmodell:
22.14
Wir betrachten das australische
Ökosystem von Hasen und Füchsen
bei unbeschränktem Grasangebot.
Seien h(N) die Anzahl Hasen und
f(N) die Anzahl Füchse zur Zeit N.
Die folgenden Gleichungen für die
Dynamik der Hasen- und Fuchspopulationen wurden aufgestellt:
h(N+1) = 4 h(N) - 2 f(N)
f(N+1) = h(N) + f(N)
Die Anfangszahlen sind h(0)=100
f(0)=50. Bestimme h(33) und f(33).
22.15
h(N+1)
f(N+1)
=
4
1
-2
1
v(N+1)
h(0)
f(0)
=
h(N)
f(N)
v(N)
A
100
50
besitzt die Lösung
h(N) =
f(N)
4 -2
1 1
N
100
50
N
A
Wie berechnet man A
33
?
Matrix Potenzieren
22.16
(nur für quadratische Matrizen)
Ist A eine n-reihige Matrix so sind
0
A = En
p
A = A A ... A
(p=1,2,3,...)
wiederholte Matrixmultiplikation
mit p Faktoren
Es gelten die Potenzgesetze:
A
p+q
A
p q
p
= A A
q
p q
= ( A )
Berechnung von
Es gibt
- A ist
- A ist
- A ist
A
N
22.17
drei Fälle:
diagonal
in diesem Kurs
diagonalisierbar
nicht diagonalisierbar
Falls A = a 1
0
a2
dann ist A N = a N
1
0
0
a
a
N
2
diagonal ist,
n
0
einfach!
a Nn
weil das Produkt von Diagonalmatrizen
komponentenweise erfolgt.
22.18
Falls A diagonalisierbar ist, d.h.
A = S D S
-1
wobei
D diagonal und S invertierbar ist,*
dann ist
N
-1
A = (SDS )(SDS ) ... (SDS )
-1
= S D N S -1
-1
N Faktoren (SDS-1)
N
wobei D einfach zu berechnen ist.
*
D = Diagonalmatrix mit Hauptdiagonalelementen
gleich der Eigenwerte der Matrix A
S = Matrix mit Spalten gleich den
entsprechenden Eigenvektoren der Matrix A
22.19
Bsp (Hasen vs. Füchse Fort.)
A = 4 -2
1 1
1 E-Werte:
pA ( l )=det 4-l -2
1 1-l
= l²-5l +6
l1 = 2 und l2 = 3.
2 E-Vektoren
E-Vek zu l1= 2:
ker(A-2E2 )=ker 2 -2
1 -1
=ker 1 -1 = span 1
0 0
1
22.20
E-Vek zu l2= 3:
ker(A-3E2 )=ker 1 -2 = span 2
1 -2
1
-1
3 Deshalb ist A = S D S ,
wobei D= 2 0 & S= 1 2 .
0 3
1 1
33
33 -1
A = S D S
33
= 1 2 2
0
-1 2
33
1 1 0
3
1 -1
33
33
34
33
=...= 2 3 - 2
2 -2 3
34
33
33
33
3 - 2
2 -3
Antwort:
33
h(33) = A 100 = ......
f(33)
50
......
23.1
IV
Eigenwerte und
Lineare DGL-Systeme
IV.5. Systeme linearer
DGL erster Ordnung
mit konst. Koeffiz.
Systeme linearer DGL erster Ordnung
mit konstanten Koeffizienten
modellieren zeitabhängige Prozesse,
deren weiterer Verlauf nur vom
Anfangszustand, aber nicht von der
Wahl des Anfangszeitpunkts abhängt.
Sie sind die einfachsten "dynamischen
Systeme" und dienen auch als
Annäherungen für andere Systeme.
23.2
Systeme linearer DGL 1. Ordnung
mit konstanten Koeffizienten
a ij
R
Ableitung bzgl. Zeit-Variable
y1 = a11y1 +a12y2 +...+a1n yn
y2 = a21y1 +a22y2 +...+a2nyn
:
:
:
:
yn = an1y1 +an2 y2 +...+ann yn
+g1 (t)
+g2 (t)
:
+gn (t)
Eine Lösung des Systems besteht
aus einem n-Tupel von Funktionen
(y 1 (t), y 2(t),..., y n(t)), die die
n linearen Differentialgleichungen
(DGL) gleichzeitig erfüllen.
23.3
Bsp
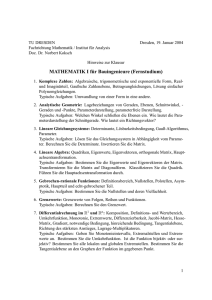
Glukose im Blut (Blutzucker)
Die Schwankungen des Blutzuckers (rot)
und des den Blutzucker kontrollierenden
Hormons Insulin (blau) beim Menschen
über den Tagesablauf mit 3 Mahlzeiten.
[nach wikipedia]
23.4
Ein Diabetiker muss genau auf seinen
Glukosestoffwechsel achten.
Es sei z(t) die Überschusskonzentration
der Glukose im Blut (in mg/dl) zur Zeit t,
d.h. die Abweichung von derjenigen, die
man nach mehreren Stunden Fasten misst.
Ein negativer Wert von z(t) zeigt an, dass
sich die Glukosekonzentration zur Zeit t
unter dem Fastenwert befindet. Es sei h(t)
die Überschusskonzentration des Insulins.
Die Forschung hat mathematische
Modelle entwickelt, die das System der
Glukoseregulation beschreiben, so z.B.
dz
dt
dh
dt
z
0.6 z
0.2 h
0.2 h
Aufgabe: Nach einem schweren
Festtagsessen, misst man z(0)=30 & h(0)=0.
Bestimme die Funktionen z(t) & h(t).
23.5
Matrizendarstellung des Systems:
y = A y + g
wobei
die Koeffizientenmatrix
A =
a 11
a 21
:
a n1
a 12 ...
a 22 ...
:
a n2 ...
a 1n
a 2n
:
a nn
eine quadratische Matrix ist,
der Lösungsvektor
23.6
y = y1
y2
yn
ist ein Vektor mit n (noch
unbekannten) Funktionen yi (t)
als Komponenten, dessen
Ableitung der Vektor der
Ableitungen yi (t) ist,
y = y1
y2
yn
der Störvektor ist ein
gegebener Vektor mit
Funktionen als Komponenten,
23.7
g = g 1(t) .
g2 (t)
g n (t)
Das System wird homogen gennant
falls g = 0 (d.h. falls alle g i (t)
die Nullfunktion sind), andernfalls
inhomogen. Das zu
zugehörige
homogene System ist
H
y = A y
Bsp 1
y1 = y1 - 2 y 3
y 2 = y1 + 3 y2 + y 3
y 3 = y1 + 4 y3
Hier ist A =
1
1
1
23.8
0 -2
3 1
0 4
und das System ist homogen.
Bsp 2
y 1 = - 5 y1 - 5 y 2
x
y2 = 4 y1 - y 2 + e
(
Hier A = -5 -5
4 -1
Bsp 3
)
()
und g = 0 .
ex
y1 = y1 + y2
y2 = - 4 y1 + 5 y 2
Hier ist A =
(
1
-4
1
5
)
und das System ist homogen.
Anfangswertproblem (AWP)
y = A y + g
y(t0) = y0
23.9
DGL System
gegebener
Anfangswert,
wobei t=t0 die
"Anfangszeit" ist
Satz (Sonderfall des berühmten
Picard-Lindelöf-Satzes)
Seien g 1(t), g 2(t),..., g n(t)
differenzierbare Funktionen.
Dann besitzt das AWP
y = A y + g
y (t 0) = y 0
eine eindeutige Lösung in einer
gewissen Umgebung von t 0,
für jede Anfangsbedingung y 0.
23.10
Lösungsverhalten
Es folgt, dass die Lösungsmenge
eines Systems n linearer DGL 1.
Ordnung mit konst. Koeffizienten
und n gesuchten Funktionen
y1 ,...,yn (ohne Anfangsbedingung)
eine n-parametrige Schar von
n-Tupel (y1 ,...,yn ) ist.
Eine Anfangsbedingung (wobei n
Werte y1 (t0 ),...,y n(t 0) angegeben
sind) legt die n Parameter fest
und bestimmt eine einzige Lösung.
Bsp
Glukose im Blut, Forts.
z
= -1
-0.2
h
0.6 -0.2
y
A
z(0) = 30
h(0)
0
y(0)
y0
23.11
z
h
y
Es gibt genau ein FunktionenPaar (z,h), das dieses AWP
erfüllt.
Aufgabe:
Bestimme dieses Funktionen-Paar (z,h).
Lösungsstrategie
23.12
y = A y + g
1. Löse das homogene System
y
=
A
y
H
Sei yH die allgemeine Lösung.
2. Bestimme eine partikuläre
Lösung yP des inhomogenen
Systems
.
Nach dem Superpositionsprinzip
(Linearität) ist die allgemeine
Lösung von
y = yP + yH .
23.13
IV
Eigenwerte und
Lineare DGL-Systeme
IV.6. Integration eines
homogenen Systems,
falls die KoeffizientenMatrix diagonalisierbar
ist mit reellen E-Werte
Wenn die Koeffizienten-Matrix A
diagonalisierbar ist, führt die Lösung
eines homogenen Systems linearer
DGL erster Ordnung auf das
Eigenwertproblem für A zurück.
23.14
Lösung des homogenen Systems
H
y = A y
Dieses System ist stets lösbar.
In diesem Kurs betrachten wir
allerdings nur die Fälle, wo die
Koeffizientenmatrix A n-reihig,
diagonalisierbar oder 2-reihig,
nicht diagonalisierbar ist.
Rufe die Eigenwerte und
Eigenvektoren ins Gedächtnis.
23.15
Idee:
Dank Linearität und Homogenität
sind Linearkombinationen von
Lösungen ebenfalls Lösungen. Es
genügt also, für ein System von
n DGL, n Lösungen zu bestimmen,
eine für jeden von n linear unabhängigen Anfangswerten y(0)=v.
Vom Fall n=1 inspiriert fangen wir
mit einem Exponentialansatz an:
Für welche Zahlen l und Vektoren
t
v ist y=e v eine Lösung von
H?
Genau dann ist y(t)=e t v eine
Lösung von y=Ay, wenn
d e t v = A e t v
dt
d.h. wenn
t
t
le v=Ae v
d.h. wenn
23.16
A v = lv
d.h. wenn l ein E-Wert der
Matrix A ist und v ein E-Vek
von A zum E-Wert l .
Besitzt A n linear unabhängige
E-Vek v1 ,...,vn (zu den E-Werte
l k ), d.h. ist A diagonalisierbar,
l1t
t
l
n
so sind e v1 ,..., e v n n linear
unabhängige Lösungen von
H.
23.17
Falls die Koeffizientenmatrix
A diagonalisierbar ist:
Seien l1 , l2 , ..., ln die nicht
notwendigerweise verschiedenen E-Werte
von A (wir berücksichtigen die Vielfachheit)
und seien v1 , v2 , ... , vn entsprechende
linear unabhängige E-Vek, i.e., A vj =lj vj .
Falls alle l j reell sind, ist die
allgemeine Lösung des homogenen
Systems
y=Ay wie folgt:
H
l1t
yH = k1 e
lnt
v 1 +...+ k n e
vn
wobei die k j beliebige reelle
Konstanten sind.
Bsp
Glukose im Blut, Forts.
z = -1
-0.2
h
0.6 -0.2
y
A
z(0) = 30
h(0)
0
y(0)
y0
23.18
z
h
y
1. Bestimmung der E-Werte
l der Matrix A
pA ( l) = det (A- l E)
= l² + 1.2 l + 0.32
= ( l +0.4)( l+0.8)
Eigenwerte: -0.4 & -0.8.
l1
l2
23.19
2. Bestimmung der E-Vek von A
ker(A+0.4E) =...= span 1
-3
v1
ker(A+0.8E) =...= span 1
-1
v2
3. Die allgemeine Lösung ist
l2
l1
-.4t
z(t) =k1e
h(t)
k1,k2
1 +k2e-.8t 1
-3
-1
v1
v2
R
23.20
4. Um die Anfangsbedingung zu
erfüllen, muss gelten:
0
k 1e
d.h.
1 + k 2e 0 1
-3
-1
=
30
0
k1 + k 2 = 30
-3 k 1 - k 2 = 0
Die Lösung dieses LGS lautet
k 1 = -15 und k 2 = 45.
Also ist die Lösung des AWP
-.8t
-.4t
z(t) = -15e +45e
-.8t
-.4t
h(t)
45e -45e
Bsp 1
A =
1
1
1
23.21
0 -2
3 1
0 4
hat die E-Werte 2, 3, 3
l1 l2=l 3
und die entsprechenden E-Vek
z.B.
0
-2
, -1
,
1
1
v1
0
1
v2
1
0
v3
Av1 =2v1 , Av2 =3v2 , Av3 =3v3
Dann sind y=e2t v1 ,e3t v2 ,e3t v3
drei Lösungen von y = A y.
Da wir drei linear unabhängige E-Vek
dieser 3-reihigen Matrix A bestimmen
konnten, ist A diagonalisierbar.
Die allgemeine Lösung des
homogenen Systems
23.22
y 1 = y1 - 2 y 3
y2 = y 1 + 3 y 2 + y 3
y3 = y 1 + 4 y 3
y = A y
lautet dann
yH=
2t -2
k1 e
1
1
+
3t -1
k 2e
0
1
v1
v2
2t
= -2 k 1e - k 2e3t
3t
2t
k1 e + k 3e
k1 e2t + k 2e 3t
wobei k1 , k 2, k 3
R.
+ k 3e
3t
0
1
0
v3
y1 (t)
y2 (t)
y3 (t)
Bsp 1' Was ist die Lösung des
folgenden AWP ?
y = A y wobei A = 1 0 -2
1 3 1
y(0) = -1
23.23
3
0
1
0
4
In der früheren allgemeinen Lösung y H
wählen wir k 1, k 2 und k 3, sodass die
Anfangsbedingung erfüllt wird:
-2k 1-k 2 = -1
k 1= 1
LGS
k1
+k 3= 3 ... k 2 = -1
k 1 +k 2
= 0
k 3= 2
Deshalb ist die Lösung dieses AWP:
y = -2 e 2t+ e 3t
y1 (t)
e 2t+ 2e 3t
y2 (t)
e 2t- e 3t
y3 (t)
Bsp 1"
A =
1
1
1
0 -2
3 1
0 4
23.24
Was ist die Lösung des
folgenden AWP ?
y = A y
y(0) = 1
2
-1
Da y(0) =
1
2
-1
= -v 2 + 2v 3
früher bestimmte
E-Vek
zufällig ;) ein E-Vek von A
zu E-Wert 3 ist, ist die
Lösung y = e3t v = e 3t .
3t
2e
3t
-e
24.1
IV
Eigenwerte und
Lineare DGL-Systeme
IV.7. Integration eines
homogenen Systems,
falls die KoeffizientenMatrix diagonalisierbar
ist und einige E-Werte
komplex sind
Wenn es Paare von konjugiert
komplexen Eigenwerte gibt, treten
Cosinus- und Sinusfunktionen in der
Lösung eines homogenen Systems auf.
24.2
Zur Erinnerung: Matrizendarstellung
eines homogenen Systems linearer
DGL 1. Ordnung mit konst. Koeff.
H
H
y1 = a11y1 +a12y2 +...+a1n yn
y2 = a21y1 +a y +...+a2nyn
:
:
:
:
yn = an1y1 +an2 y2 +...+ann yn
y = A y
wobei:
A die Koeffizientenmatrix ist
und y(x) der Lösungsvektor.
Zur Erinnerung:
24.3
Falls die Koeffizientenmatrix
A diagonalisierbar ist und ihre
Eigenwerte alle reell sind, ist
die allgemeine Lösung von
y = A y
die n-parametrige Schar von Funktionen
l1t
yH = k 1e
v1 +...+ k n e
l nt
vn
wobei die kj beliebig reelle Parameter
sind, die l j die nicht notwendigerweise
verschiedenen E-Werte von A (wir
berücksichtigen die Vielfachheit) und die
v j die entsprechenden E-Vek: Avj =lj vj .
24.4
Falls die Koeffizientenmatrix
A diagonalisierbar ist, aber
einige Eigenwerte komplex
sind, gilt die frühere Formel
noch als allgemeine komplexe
Lösung, wobei jetzt die kj
beliebig komplexe Zahlen sind.
Aber für ein reelles System
bevorzugen wir immer eine
reelle allgemeine Lösung!
Satz Sei
f(t) = Re f(t) + i Im f(t)
eine komplexe Lösung des
reellen Systems y = A y.
Dann sind der Real- und der
Imaginärteil von f(t) reelle
Lösungen des Systems.
24.5
Beweis:
f erfüllt die Gleichung, d.h., f = Af.
Aber eine komplexe Gleichheit
beinhaltet zwei reelle Gleichheiten:
d
Re f = Re(Af)
dt Re f = A(Re f)
<=> d
Im f = Im(Af)
Im f = A(Im f)
dt
und diese bedeuten, dass die reellen
Funktionen Re f und Im f beide
die Gleichung y = Ay erfüllen.
24.6
Sei l=a+ib ein komplexer E-Wert
der Matrix A und sei u+is ein
entsprechender komplexer E-Vek.
(a+ib)t
Dann ist f(t) = e
( u+is) eine
komplexe Lösung des reellen
Systems y = A y und deshalb
sind Re f(t) und Im f(t) reelle
Lösungen dieses Systems.
Zur Erinnerung: die Eulersche Formel
(a+ib)t
t
a
e
= e (cos( bt) + i sin( bt)) .
Deshalb sind die folgenden Fkt
reelle Lösungen von y = Ay:
at
Re f = e (cos( b t)u - sin( b t)s)
at
Im f = e (sin( b t)u + cos( bt)s)
24.7
Zur Erinnerung:
Bei reellen Matrizen A treten komplexe
Eigenwerte stets als Paare zueinander
komplex konjugierter Zahlen l , l auf.
Für jedes Paar von komplex
konjugierten E-Werten von A,
l =a + i b und l =a - i b ,
seien u+is und u-is zugehörige
komplex konjugierte E-Vek:
A ( u+is ) = l ( u+is ),
=> A ( u-is ) = l ( u-is ).
D.h. berechne einen E-Vek zu l und
bezeichne dessen Realteil als u, dessen
Imaginärteil als s. Dann ist u-is ein
E-Vek zu l . Wiederhole, falls es
mehrere linear unabhängige E-Vek gibt.
24.8
Um die allgemeine reelle Lösung
von
H aufzuschreiben, ersetze
in der früheren Formel für y H
die (komplexe) Kombination von
lt
lt
e ( u+is ) und e ( u-is )
durch die (reelle) Kombination von
at
e
(cos(b t)u - sin( b t)s)
und
at
e
(sin(b t)u + cos( b t)s).
Wiederhole diese Ersetzung für jedes
Paar von komplex konjugierten E-Werten,
falls es mehrere solche Paare gibt.
24.9
Zusammenfassung für den 2x2 Fall
Wir starten mit einem homogenen
System
H
x = a x + b y
y = c x + d y
wobei a,b,c,d vorgegebene reelle
Koeffizienten sind
und nehmem an, dass die
ensprechende Koeffizientenmatrix
A = a b
komplexe E-Werte
c d
hat:
l =a + i b
und
l =a - i b.
Wir bestimmen einen E-Vek
zu E-Wert l =a + i b und
schreiben ihn als u+is , wobei
u und s reelle Vektoren sind.
24.10
Dann ist die allgemeine Lösung
von
H
yH = k 1e a t (cos( b t)u - sin( bt)s)
at
+ k2e (sin( b t)u + cos( b t)s).
wobei k1, k2 reelle Konst. sind.
Bmk Man braucht die E-Vek zu l = a - ib
nicht aufzuschreiben, da diese
Vektoren (Vielfache von u-is )
nichts Neues bringen.
24.11
Bsp 2 H
y 1 = -5 y 1 -5 y 2
y2 = 4 y1 - y 2
<=> y = A y
wobei A =
(
-5 -5
4 -1
)
A hat die E-Werte -3 4i
l,l
a =-3, b =4
und entsprechende E-Vek
z.B.
5
i 0 .
(-2) (-4)
u
s
24.12
Die allgemeine reelle Lösung
des Systems y=Ay ist dann
-3t
(
yH = k 1e
e
cos(4t)
at
-3t
+ k2e
e
-3t
= e
(
-sin(4t)
( ))
0
-4
( cos( b t) u - sin( b t) s )
sin(4t)
(
at
( )
5
-2
+cos(4t)
( )
5
-2
( ))
0
-4
( sin( b t) u + cos(b t) s )
(5k1 ) cos(4t) + (5k2 ) sin(4t)
(-2k1 -4k2 )cos(4t)+(-4k1 -2k2 )sin(4t)
)
wobei k1 und k2 beliebige reelle Konstanten sind.
Das heisst, dass
{
-3t
y (t) = e ( 5k1 cos(4t) + 5k2 sin(4t) )
1
y2 (t) = e-3t((-2k1 -4k2 )cos(4t)-(4k1 +2k2 )sin(4t))
24.13
IV
Eigenwerte und
Lineare DGL-Systeme
IV.8. Integration eines
homogenen Systems in
der Ebene mit einer
nicht diagonalisierbaren
Koeffizientenmatrix
Wenn die Koeffizientenmatrix nicht
diagonalisierbar ist (d.h. es gibt
keine E-Basis), brauchen wir neben
den E-Vek sogennante Hauptvektoren.
Lösung eines homogenen
Systems
y = A
H
24.14
y
falls die Matrix A 2-reihig
& nicht diagonalisierbar ist:
Sei l der einzige (unbedingt reelle)
E-Wert von A und sei v ein E-Vek,
d.h., (A- l E) v = 0 und v = 0.
Bestimme einen sogenannten
Hauptvektor, d.h., einen Vektor w,
so dass (A- l E) w = v.
Dann ist die allgemeine Lösung:
lt
yH = k1 e
lt
v + k 2e (t v + w )
wobei k 1 & k 2 beliebig reell sind.
Check: setze diese y ins System ein und bestätige!
24.15
Bsp 3
y 1= y1 + y 2
y2 = -4 y1 +5 y 2
<=> y = A y
wobei A =
(
1
-4
1
5
)
A hat den einzigen E-Wert 3
l
und entsprechenden E-Vek
.
()
1
2
v
Da wir nicht zwei linear unabhängige E-Vek der 2-reihigen
Matrix A finden können, ist A
nicht diagonalisierbar.
24.16
Wir bestimmen dann einen
Vektor w, so dass
(
-2
-4
1
2
)
w =
1
2
()
(A- l E) w = v
z.B. w = 0 .
(1)
Die allgemeine Lösung des
Systems y = A y ist dann
yH =
3t 1
k 1e
2
3t
( ) +k e (t ( )( ))
lt
l
t
k1e v + k 2e (tv + w
3t
= e
2
1+ 0
2
1
k1 + k 2 t
(2k 1+k 2) +2k2t
(
)
)
y1 (t)
y2 (t)
wobei k 1 und k 2 beliebig reell sind.
25.1
IV
Eigenwerte und
Lineare DGL-Systeme
IV.9. Überblick der
homogenen Systeme in
der Ebene, Stabilität
Systeme in der Ebene modellieren die
Wechselwirkung zwischen zwei Grössen
(Populationsanzahlen, Stoffkonzentrationen, etc). Wir betrachten hier
Systeme zweier gekoppelten linearen
homogenen DGL mit konst. Koeff.,
die sehr oft im Einsatz kommen.
Überblick der
homogenen linearen
Systeme DGL 1. Ordnung
mit konstanten Koeffiz.
in der Ebene
25.2
n=2
x = a x + b y
y = c x + d y
a,b,c,d sind vorgegebene reelle Koeffizienten
Ein solches System liefert ein lineares
Modell eines zeitabhängigen Prozesses,
wobei x(t) und y(t) zwei unbekannte
Funktionen der Zeit t sind.
Bahnkurven
25.3
x = a x + b y
y = c x + d y
Eine Bahnkurve des Systems
ist eine Kurve (x(t),y(t)), wobei
(x(t),y(t)) eine Lösung von
ist.
y
x
Eine Bahnkurve (x(t),y(t)) heisst
geschlossen, falls die Komponenten
x(t) und y(t) periodisch sind.
Phasenporträt
25.4
Ein Phasenporträt eines Systems
ist eine graphische Darstellung,
wobei einige charakterisierende
Bahnkurven (oder "Trajektorien")
skizziert werden, um die Dynamik
des Systems zu erfassen.
Bmk Es folgt aus dem Satz von
Picard-Lindelöf, dass durch
jeden Punkt genau eine
Bahnkurve läuft.
(Gäbe es zwei sich kreuzende
Bahnkurven, so wäre die Lösung
des AWP nicht eindeutig.)
Fixpunkte
25.5
Der Ursprung heisst ein Fixpunkt oder
Gleichgewichtspunkt von
, da (0,0)
eine konstante Lösung von
ist.
Der Fixpunkt (0,0) heisst stabil,
wenn alle Lösungen des Systems
zu Anfangswerten in der Nähe vom
Ursprung (0,0) in der Zukunft auch
in der Nähe von (0,0) bleiben.
Sonst heisst der Fixpunkt (0,0)
instabil.
(0,0) ist stabil
(0,0) ist instabil
Matrix-Schreibweise
25.6
x = a x + b y
y = c x + d y
<=>
x = a b
y
c d
x
y
A
Es gibt drei Fälle für die Matrix A:
1 diagonalisierbar mit reellen Eigenwerten;
2 diagonalisierbar mit konjugiert
komplexen Eigenwerten;
3 nicht diagonalisierbar.
25.7
1
Falls A zwei linear unabhängige
Eigenvektoren v 1, v 2 zu reellen
Eigenwerten 1, 2 besitzt, dann
ist die allgemeine Lösung von
x = k1 e
y
1
t
v1 + k2 e
2
t
v2
wobei k1 und k 2 beliebige reelle
Konstanten sind.
Zum Beispiel ist
x(t) = 2 e 1t v 1- 3 e 2t v 2
y(t)
die Lösung des AWP mit dem
Anfangswert x(0) = 2v 1-3v 2.
y(0)
Zum Beispiel ist
= e 1t v
25.8
x(t)
1
y(t)
die geradlinige Lösung des AWP mit
dem Anfangswert
x(0) = v 1 .
y(0)
Diese Lösung...
strebt in der Zukunft (t>0) zu 0
falls
<0
,
0
1
ist konstant, falls
=0
oder
1
wächst auswärts, falls
>0
.
1
Sei Eig 1 der
-Eigenraum
von
A,
1
(d.h. die Menge aller Vektoren von
der Form kv 1, k R) und Eig der
2
Eig
-Eigenraum;
2
beide sind
Eig
Geraden:
Typen von Phasenporträts,
wenn A diagonalisierbar ist
mit reellen Eigenwerten:
Eig
Eig
Eig
0< 1<
2
25.9
(beide positiv)
Eig
1< 2<0
(beide negativ)
Eig
Eig
1<0< 2
(ein positiver E-Wert & ein negativer)
25.10
Ein Eigenwert ist null, der andere nicht:
Eig
Eig
Eig 0
1=0,
2 >0
Eig 0
1=0,
Ein doppelter Eigenwert und A =
1= 2>0
2 <0
l 0 :
0 l
1= 2<0
2 Falls A ein Paar konjugiert
komplexer Eigenwerte besitzt,
l1=a+ib
25.11
l2=l1=a -ib
seien u+is und u-is zugehörige
konjugiert komplexe Eigenvektoren.
Dann ist die allgemeine reelle
Lösung von
at
x = k1 e (cos(bt)u-sin(b t)s)
at
y
+k2 e (sin(bt)u+cos(b t)s)
wobei k 1 und k 2 beliebige reelle
Konstanten sind.
Bsp
x(t) = et cos t
y(t) = e t sin t
=> |x²+y²| = e 2t
Abstand zum Ursprung
wächst exponentiell
Typen von Phasenporträts
für komplexe Eigenwerte:
l=a+ib
mit a>0
l=a+ib
mit a<0
l= +ib
also a =0
25.12
25.13
3
Falls alle Eigenvektoren von A
kollinear sind, sei
der einzige
Eigenwert und v ein Eigenvektor.
Sei w ein "Hauptvektor", d.h.
ein Vektor w, so dass (A- E)w=v.
Dann ist die allgemeine Lösung
von
x = k1 e
y
t
v + k2 e
t
(tv+w),
wobei k1 und k 2 beliebige reelle
Konstanten sind.
Typen von Phasenporträts,
wenn die Koeffizientenmatrix
A nicht diagonalisierbar ist:
Eig
25.14
Eig
> 0
< 0
Eig
= 0
AW
*
25.15
Namen der verschiedenen Typen:
Quelle
oder
ist instabil
Senke
oder
ist stabil
Sattel
ist instabil
AW=Allgemeinwissen & nicht Gegenstand der Prüfung.
25.16
instabiler
Knoten
stabiler
Knoten
Linienquellen
sind instabil
Liniensenken
sind stabil
25.17
instabiler
Strudel
stabiler
Strudel
Wirbel
ist stabil
Alternative Sichtweise
x = a b
y
c d
25.18
x
y
A
Sei S = a+d die Spur der Matrix A
D = ad-bc
ihre Determinante
p ( ) = ²-S +D charak. Polyn.
A
= S²-4D
die Diskriminante
des charakteristischen Polynoms.
Nach der Mitternachtsformel sind die
Nullstellen des charak. Polynoms:
S
=
2
und deshalb:
reell und verschieden, falls
> 0;
reell und gleich, falls
konjugiert komplex, falls
= 0;
<0.
x = a b
y
c d
D
x
y
25.19
A
S
wobei S = a+d
= Sp A
D = ad-bc = det A
= S²-4D
Spur
Determinante
Diskriminante
Vorschau
Autonome dynamische Systeme
in der Ebene
25.20
x(t),y(t) sind zwei
unbekannte Funktionen
der Zeit t
Zeit kommt nicht
explizit vor
Modell eines
zeitabhängigen
Prozesses
Die früheren linearen Systeme liefern
Näherungen für Systeme von der Form:
x = f(x,y)
y = g(x,y)
(f und g sind vorgegebene Funktionen)
Siehe Mathematik II !
IV
25.21
Eigenwerte und
Lineare DGL-Systeme
*
IV.10. Integration eines
inhomogenen Systems
mittels Lösungsansätze
AW
Wenn alle Komponenten eines
Störvektors nur Funktionen enthalten,
die selbst in Lösungen von homogenen
Systeme erscheinen (e at, cos(bt),
sin(bt), t, t²,...), liefert die
Ansatzmethode eine spezielle
(d.h. partikuläre) Lösung des
inhomogenen Systems.
Bestimmung einer
partikulären Lösung
eines inhomogenen Systems
25.22
y = A y + g
Unsere Lösungsansatz-Methode
erfordert, dass alle
Komponenten des Störvektors
g Summen oder Produkte von
Cosinus-, Sinus-, Exponentialund Polynomfunktionen sind.
Um einen Lösungsansatz zu wählen, müssen
sowohl alle Komponenten von g als auch die
vorher bestimmte yH berücksichtigt werden.
Lösungsansatz-Methode
25.23
Zuerst schreibe eine Liste aller Funktionen
eat
, cos (bt) , sin (bt) , tm
(mit konkreten Konstanten a, b, m),
die in den Komponenten von g auftreten.
Wähle einen Lösungsansatz anhand einer
Tabelle, ähnlich der Tabelle Lösungsansätze
für lineare DGL 2. Ordnung mit konstanten
Koeffizienten (s. Seite 25.28).
Setze diesen Ansatz in das System ein,
setze die Koeffizienten der Grundfunktionen
gleich und löse das auf diese Weise
erhaltene LGS, um die unbekannten Koeff.
zu bestimmen.
Aufgrund der grossen Zahl von Parametern
kann das schnell anstrengend werden.
Bsp 2B Löse
{
25.24
y1 = -5 y1 -5 y2
y2 = 4 y1 -y 2 + e t
Der Störvektor ist g B=
0 .
et
Die E-Werte der Koeff.-Matrix
A sind -3 4i (siehe Vorlesung
24). Da 1 kein E-Wert von A
ist und die einzige relevante
Störfkt et ist, nehmen wir den
Lösungsansatz:
y(t) =
c 1e t
c2 e t
y1
y2
Um die Parameter c 1 und c 2
zu bestimmen, setzen wir den
Lösungsansatz im System ein.
{
t
t
t
c 1e = - 5c1e - 5c 2e
t
t
t
t
c2e = 4c 1e - c 2e + e
25.25
Wir setzen die Koeffizienten von
et gleich und lösen das LGS:
5
c1= - 32
c1= -5c1 -5c 2
<=>
3
c2 = 16
c2= 4c1 -c2 +1
{
{
5 et
Also ist yB = - 32
eine partik.
3 et
Lösung.
16
Die allgemeine Lösung y H des
zugehörigen homogenen Systems
haben wir auf der Seite 24.12
erhalten. Deshalb ist die
allgemeine Lösung des Systems
y = yB + y
-3t
e
H
= -
5et
32
3 et
16
+
(5k1) cos(4t) + (5k 2) sin(4t)
(-2k1-4k2)cos(4x)+(-4k1-2k2)sin(4t)
Bsp 2C Löse
{
y 1= -5 y 1 -5 y 2+3
y 2= 4 y 1 - y 2
25.26
Der Störvektor, g =
3 ,
C
0
enthält nur eine konstante Fkt.
Da 0 keine Nullstelle des charak.
Polynoms ist, nehmen wir den
Lösungsansatz y = c 1 .
y1
c2
y2
Nach Ersetzung im System
bestimmen wir c 1 und c 2 und
finden die partikuläre Lösung
3
y =
25 .
C
12
25
Die allg. Lösung ist y + y .
Bmk
C
H
Eine partikuläre Lösung lässt sich
einfach durch Substitution verifizieren.
Bsp 2A Löse
{
25.27
y 1= -5 y 1 -5 y 2+ 3
t
y 2= 4 y 1 - y 2 + e
Der Störvektor, g A =
3 , ist
et
gleich der Summe der vorherigen,
gA = g B + g . Dank Linearität
C
ist dann eine partikuläre Lösung
hier die Summe der früheren
partikulären Lösungen:
5 e t
3 .
y = yB + y =
+
A
32
25
C
3 e t
12
16
25
Die allgemeine Lösung ist wie
früher y = y + y .
A
Bmk
H
Alternativ könnten wir direkt den
folgenden Lösungsansatz verwenden:
y =
P
c 1 + c2 e t
c3 + c 4 e t
y1
y2
25.28
Bmk Lineare DGL 2. und höherer
Ordnung lassen sich als Systeme
betrachten. Wir tauschen
Ableitungen höherer Ordnung
gegen mehrere unbekannte
Funktionen: y=y 1,y'=y 2,y"=y 3,...
Z.B.
y" + b y' + c y = G(x)
wird
{
y'1 = y2
y'2 = - b y 2- c y 1+ G(x)
y" = - b y' - c y + G(x)
Deswegen sind die früheren
Lösungsmethoden für Systeme
auch für DGL höherer Ordnung
verwendbar.
AW=Allgemeinwissen & nicht Gegenstand der Prüfung.