Blatt 11
Werbung

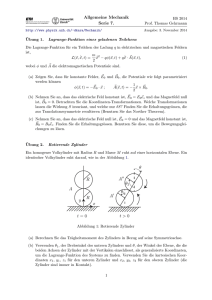
b) Für einen Zylinder bieten sich Zylinderkoordinaten an. Legt man den Ursprung in den Schwerpunkt und die z- bzw. x3 - Achse entlang der Zylinderachse, verschwinden alle Deviationsmomente. Dies liegt daran, dass diese Koordinatenwahl bereits den Hauptachsen angepasst ist. Wir verzichten daher auf eine Berechnung der Deviationsmomente; der interessierte Leser kann dies aber gerne überprüfen. Aufgrund der Symmetrie sind zwei Trägheitsmomente identisch, Θ11 = Θ22 . Das dritte, Θ33 wird sich im allgemeinen davon unterscheiden. Wir beginnen mit der Berechnung von Θ11 : Z R Z 2π Z H/2 dzρ ρ2 sin2 φ + z 2 dφ dρ Θ11 = µ −H/2 0 0 Hier wurde die Jacobi-Determinante der ZylinderKoordinaten verwendet (det J = ρ). Wir führen zunächst die ρ-Integration durch: Z 2π Z H/2 1 4 2 1 2 2 Θ11 = µ dφ dz R sin φ + z R 4 2 0 −H/2 Die z-Integration liefert 2π Z dφ Θ11 = µ 0 1 4 1 R H sin2 φ + R2 H 3 4 24 Die Stammfunktion von sin2 φ ist (φ − sinφ cos φ)/2. Der zweite Term darin trägt nicht zum Integral bei, da er sowohl für φ = 0 als auch für φ = 2π verschwindet. Daher ist π π 2 3 1 2 1 2 4 Θ11 = µ R H+ R H =M R + H , 4 12 4 12 wobei M = πµR2 H für die Zylindermasse eingesetzt wurde. Fu?r das dritte Trägheitsmoment gilt Z R Z 2π Z H/2 π 1 dzρ3 = µR4 H = M R2 . dφ dρ Θ33 = µ 2 2 −H/2 0 0 Offensichtlich ist ein Zylinder ein Kugelkreisel (Θ11 = Θ33 ), wenn H 2 = 3R2 erfüllt ist. c) Die Berechnung für einen Hohlzylinder erfordert erneut eine Oberflächen-Massendichte. Für das erste Trägheitsmoment gilt Z 2π Z H/2 dφ dzR(R2 sin2 φ + z 2 ) . Θ11 = σ −H/2 0 Die z-Integration führt auf 2π Z Θ11 = σ 0 1 dφR R H sin φ + H 3 12 2 2 , die φ-Integration auf Θ11 π 3 = σR πR H + H = M 6 2 1 2 1 R + H2 2 12 . Die Gesamtmasse ist hierbei M = 2πσRH. Das dritte Trägheitsmoment ist Z 2π Z H/2 Θ33 = σ dφ dzR3 = 2πσR3 H = M R2 . 0 −H/2 Ein Hohlzylinder mit H 2 = 6R2 ist demnach ein Kugelkreisel. 2 Übung 8.2: Rollender Zylinder Zylinders (z = H) t die Berechnung die Grenzen der M R ω 2 � Messung ... Ein anfänglich ruhender Zylinder rolle eine schiefe Ebene hinunter (siehe Abbildung). Der Aufgaben 149 Neigungswinkel der Ebene ist α. Der Zylinder hat eine homogene Dichte, Masse M und Radius R. V ϕ + z . (5.165) FG grationen durch, � z) ein � α (5.166) . . Abbildung 5.12dass Einder Zylinder (Radius R und Masse M )welche rollt unter demgilt dann a) Wenn man annimmt, Zylinder rollt und nicht gleitet, Relation Einfluss der Gravitationskraft Ebenebewegt, mit Neigung G eine zwischen der Geschwindigkeit v, mit derFsich der schiefe Schwerpunkt und derα und finden hinunter. Dabei bewegt sich sein Schwerpunkt mit Geschwindigkeit V, Winkelgeschwindigkeit ω des Zylinders um den Schwerpunkt? und der Mantel dreht sich mit Winkelgeschwindigkeit ω. b) Bestimmen Sie die kinetische Energie des Zylinders, die sich aus der Translations- und Rotationsenergie ergibt. c) Wie gross ist die Komponente der nach unten zeigenden Gravitationskraft |FG | = M g (5.167) man annimmt, dass der Zylinder rollt und nicht gleientlang1. derWenn schiefen Ebene? Relation des giltZylinders dann zwischen der schiefen Geschwindigkeit d) Wie stark tet, wirdwelche der Schwerpunkt entlang der Ebene beschleunigt? Nutzen SieV, beimit der der Rechnung die Schwerpunkt Energieerhaltung aus. sich der bewegt, und der Winkelge- schwindigkeit ω des Zylinders um den Schwerpunkt? . (5.168) 2. Bestimmen Sie die kinetische Energie des Zylinders, die sich Lösung von Übung 8.2 aus der Translations- und Rotationsenergie ergibt. schließlicha) Der Zylinderschwerpunkt 3. Wie groß ist die der nach Zeitintervall unten zeigenden Gra-ds = V dt legtKomponente in einem infinitesimalen die Strecke zurück. Dies muss gleichzeitig abgerollten entsprechen. vitationskraft |FG | der = Mg entlangBogenlänge der schiefen Ebene? In der gleichen Zeit muss sichstark um einen dφ = ωdt drehen. Winkel und entlang Bogenlänge 4. er Wie wirdWinkel der Schwerpunkt des Zylinders dersind über (5.169) ds = Rdφ verknüpft. Daher folgt schiefen Ebene beschleunigt? Nutzen Sie dazu die EnergieV = Rω erhaltung aus. µ 0 � 0 H Hinweis: b) Die kinetische Energie der Translation ist dz R4 (z). (5.170) Resultat: ausführliche Lösung: 1 TS = M V 2 . 2 Für die Rotation gilt MR2 . (5.171) üglich der Spitze de. Mit dem Steior bezüglich des 1. Der Zylinderschwerpunkt legt 1 in einem infinitesimalen ZeitTR = Θω 2 , intervall die Strecke ds = V 2dt zurück. Dies muss gleichzeitig der abgerollten Bogenlänge entsprechen. In der gleichen Zeit muss er sich um einen Winkel dϕ = ω dt drehen. Winkel und 3 Bogenlänge sind über ds = R dϕ verknüpft. Daher folgt V = Rω. (5.173) wobei Θ das Trägheitsmoment bezüglich des Schwerpunktes für eine Drehung um die Symmetrieachse ist. Aus der vorherigen Aufgabe bzw. aus der Literatur wissen wir, dass 1 Θ = M R2 2 ist. Insgesamt gilt also 3 1 1 T = M V 2 + M R2 ω 2 = M V 2 . 2 4 4 Der Zylinder hat daher eine um den Faktor 3/2 höhere kinetische Energie als eine Punktmasse M mit der gleichen Geschwindigkeit V . c) Die auf den Zylinder wirkende Kraft lässt sich in zwei Anteile zerlegen. Eine Komponente wirkt senkrecht auf die schiefe Ebene und trägt nicht zur Beschleunigung bei. Die andere wirkt parallel zur schiefen Ebene. Dies führt auf eine Kraft F = −M g sinα . d) Unter Vernachlässigung von Reibungskräften entspricht die Abnahme der potentiellen Energie beim Herabrollen gerade der Zunahme der kinetischen Energie. Der Potentialnullpunkt kann beliebig verschoben werden, sodass wir 3 0 = E = M V 2 + M gh 4 für die Energie E schreiben können, wobei h < 0 die Höhe des Schwerpunktes bezüglich der Anfangslage ist. Aufgrund der Geometrie ist die zurückgelegte Strecke entlang der Ebene s= h . sinα Dabei gilt ausserdem ν = ṡ < 0 und somit 3 2 ṡ + gs sinα = 0 . 4 Einmaliges Ableiten nach der Zeit ergibt 3 ṡs̈ = −g ṡ sinα 2 und schiesslich 2 s̈ = − sinαg < 0 . 3 Die Beschleunigung ist dem Betrage nach aus zwei Gründen geringer als die beim freien Fall: Zum einen wirkt aufgrund der schiefen Ebene nur ein Teil der Gewichtskraft entlang der Ebene. Andererseits beansprucht die Drehbewegung einen Teil der kinetischen Energie, welcher der Schwerpunktsbewegung fehlt. 4 Übung 8.3: Kräftefreier symmetrischer Kreise Diese Aufgabe verwendet die Notation und Gleichungen aus dem Skript zur Vorlesung. Das Skript kann aus dem Internet unter http://www.physik.uni-muenchen.de/lehre/vorlesungen/sose 13/T1/mechanikskript.pdf heruntergeladen werden. Bevor Sie mit dieser Aufgabe beginnen, sollten Sie sich noch einmal mit der Notation im Kapitel 4 des Skripts vertraut machen. Die Rotation des kräftefreien symmetrischen Kreisels soll genauer untersucht werden. a) Entwickeln Sie die Figurenachse ê∗3 nach den Basisvektoren êi im raumfesten Koordinatensystem S und die Drehimpulsachse ê3 nach den Basisvektorene ê∗i im körperfesten System S ∗ .Verwenden Sie dazu die Transformationsmatrix D in (4.9). b) Zeigen Sie, dass sowohl ê∗3 in S als auch ê3 in S ∗ präzediert und geben Sie jeweils die Präzessionsfrequenz an. Beachten Sie dabei die Lösung der Euler-Winkel in (4.150). c) Begründen Sie anhand der Struktur der Matrix D, dass beide Frequenzen nicht identisch sind. Wie gross ist ihr Verhältnis? Wie lautet die Bedingung, dass beide Frequenzen identisch sind? d) Scheinbar kann die Frequenz Ω0 beliebig gross werden, wenn cos θ → 0. Begründen Sie, warum Ω0 stets endlich bleibt. e) Mit den bisher erhaltenen Zwischenergebnissen ist es relativ leicht, die Gültigkeit von (4.131) zu zeigen: Berechnen Sie die Komponenten der Winkelgeschwindigkeit ω in S. Gehen Sie dabei von (4.126) aus. — Lösung von Übung 8.3 a) Wir beginnen mit (5.12), was auf unser Problem angewandt ê∗i · ê3 = Di3 und ê∗3 · êj = D3j ergibt. Dies bedeutet, dass die Entwicklungskoeffizienten von ê3 in der Basis von S ∗ gerade durch die drei Matrixelemente Di3 gegeben sind. Daher kann man die Entwicklung ê3 = sinθ sinψ ê∗1 + sinθ cosψ ê∗2 + cosθ ê∗3 (1) direkt aus der Matrix D ablesen. Analog findet man ê∗3 = sinφ sinθ ê1 − cosφ sinθ ê2 + cosθ ê3 . (2) Diese Gleichungen sind für Kreisel aller Art gültig, da bisher keinerlei Annahmen gemacht wurden. b) Für den kräftefreien symmetrischen Kreisel ist insbesondere θ eine Konstante. Dies bedeutet, dass die Zeitabhängigkeit von ê3 in S ∗ und von ê3 in S nur in ψ bzw. φ enthalten ist. Hier wissen wir, dass ψ̇ und φ̇ Konstanten sind. Wir hatten im Text ψ̇ = Ω = Θ − Θ3 ∗ ω3 , Θ φ̇ = Ω0 = Θ3 ω3∗ Θ cosθ gefunden. Anhand von (1) und (2) sieht man somit, dass die Projektionen von ê∗3 auf ê3 und von ê3 auf ê∗3 konstant sind. Doch ê∗3 führt in der ê1 − ê2 -Ebene eine Oszillation mit 5 Frequenz φ̇ = Ω0 aus, denn es gilt φ = Ω0 t + φ0 . Gleichzeitig oszilliert ê3 in der ê∗1 − ê∗2 Ebene mit Frequenz ψ̇ = Ω, da überdies ψ = Ωt + ψ0 erfüllt ist. Es ist dabei allerdings zu beachten, dass beide Oszillation gegenläufig sind, da in (2) ein Minuszeichen auftritt. c) Offensichtlich unterscheiden sich die beiden Oszillationsfrequenzen ψ̇ und φ̇ dem Betrage nach. Dies liegt daran, dass die Matrix D nicht symmetrisch ist. Im einen Fall wird die dritte Zeile, im anderen die dritte Spalte für die Transformation verwendet. Das Verhältnis der beiden Frequenzen lautet ψ̇ Θ − Θ3 cosθ . = Θ3 φ̇ Je nach der Art des Kreisels (oblat, Θ < Θ3 , oder prolat, Θ > Θ3 ) und der Neigung θ der Figurenachse zur Drehimpulsachse kann der Quotient beliebige positive oder negative Werte annehmen. Beide Frequenzen sind dem Betrage nach identisch, wenn cosθ = Θ3 Θ − Θ3 gilt. d) Die Frequenz Ω0 lässt sich in der Form Ω0 = L∗3 Θ cosθ schreiben. Der Drehimpuls ist entlang ê3 ausgerichtet, L = Lê3 . Der Grenzfall cos θ → 0 entspricht θ → 90o . Andererseits folgt aus (1), dass die Projektion von L auf die Figurenachse ê∗3 ebenfalls cos θ ist, L∗3 = L · ê∗3 = L cosθ Somit ist Ω0 = L Θ völlig unabhängig vom Winkel θ zwischen Figurenachse und Drehimpuls. e) Die Winkelgeschwindigkeit erfüllt ω = φ̇ê3 + θ̇êK + ψ̇ê∗3 . (3) Um ihre Komponenten in S zu berechnen, muss sie auf die Vektoren êi projiziert werden. Der erste Term in (3) ist trivial. Der letzte wurde bereits in (2) bestimmt. Die Knotenlinie lässt sich direkt aus Abbildung 5.3 zu êK = cosφ ê1 + sinφ ê2 ablesen. Nach einer kurzen Sortierung folgt das Endergebnis sin φ sin θ ω1 0 cos φ ω2 = φ̇ 0 + θ̇ sin φ + ψ̇ − cos φ sin θ . ω3 1 0 cos θ 6