Allgemeine Mechanik Serie 7.
Werbung

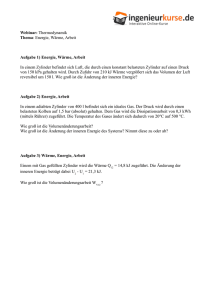
Allgemeine Mechanik Serie 7. Ausgabe: 3. November 2014 http://www.physik.uzh.ch/~dkara/Mechanik/ Übung 1. HS 2014 Prof. Thomas Gehrmann Lagrange-Funktion eines geladenen Teilchens Die Lagrange-Funktion für ein Teilchen der Ladung q in elektrischen und magnetischen Feldern ist, m ~ x, t), (1) L(~x, ~x˙ , t) = ~x˙ 2 − qφ(~x, t) + q~x˙ · A(~ 2 ~ die elektromagnetischen Potentiale sind. wobei φ und A ~ 0 und B ~ 0 , die Potentiale wie folgt parametrisiert (a) Zeigen Sie, dass für konstante Felder, E werden können ~ 0 · ~x ; ~ x, t) = − 1 ~x × B ~ 0. φ(~x, t) = −E A(~ 2 ~ 0 = E0~ez und das Magnetfeld null (b) Nehmen Sie an, dass das elektrische Feld konstant ist, E ~ ist, B0 = 0. Betrachten Sie die Koordinaten-Transformationen. Welche Transformationen lassen die Wirkung S invariant, und welche nur δS? Finden Sie die Erhaltungsgrössen, die aus Translationssymmetrie resultieren (Benutzen Sie das Noether Theorem). ~ 0 = 0 und das Magnetfeld konstant ist, (c) Nehmen Sie an, dass das elektrische Feld null ist, E ~ 0 = B0~ez . Finden Sie die Erhaltungsgrössen. Benutzen Sie diese, um die BewegungsgleiB chungen zu lösen. Übung 2. Rotierende Zylinder Ein homogener Vollzylinder mit Radius R und Masse M ruht auf einer horizontalen Ebene. Ein identischer Vollzylinder ruht darauf, wie in der Abbildung 1. Abbildung 1: Rotierende Zylinder (a) Berechnen Sie das Trägheitsmoment des Zylinders in Bezug auf seine Symmetrieachse. (b) Verwenden θ1 , der Drehwinkel des unteren Zylinders und θ, der Winkel der Ebene, die die beiden Achsen der Zylinder mit der Vertikalen einschliesst, als generalisierte Koordinaten, um die Lagrange-Funktion des Systems zu finden. Verwenden Sie die kartesischen Koordinaten x1 , y1 , z1 für den unteren Zylinder und x2 , y2 , z2 für den oberen Zylinder (die Zylinder sind immer in Kontakt). 1 (c) Welches sind die Konstanten der Bewegung? (d) Zeigen Sie, dass, solange die Zylinder in Kontakt bleiben, θ̇2 = Übung 3. 12g(1 − cos θ) . R(17 + 4 cos θ − 4 cos2 θ) (2) Steiner-Theorem I ist der Trägheitstensor eines starren Körpers im Koordinatensystem x1 , x2 , x3 , wobei der Ursprung im Schwerpunkt ist. Wir transformieren zu einem neuen Koordinatensystem x01 ,x02 ,x03 , durch eine Verschiebung des Koordinatensystems um einen Abstand ~a, so dass die neuen Achsen parallel zu den alten sind. Zeigen Sie, dass der Trägheitstensor in dem neuen Koordinatensystem I 0 gegeben ist durch Iij0 = Iij + m (ak ak δij − ai aj ) . 2