Experimentalphysik II Strom und Magnetismus
Werbung

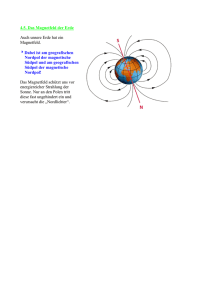
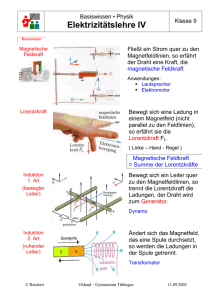
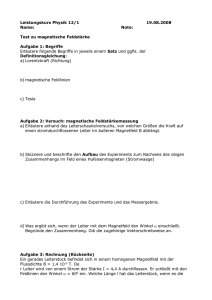
Experimentalphysik II Strom und Magnetismus Ferienkurs Sommersemester 2009 Martina Stadlmeier 08.09.2009 Inhaltsverzeichnis 1 Der 1.1 1.2 1.3 1.4 1.5 1.6 elektrische Strom Stromdichte . . . . . . . . . . . . . . . . . . . . . Kontinuitätsgleichung . . . . . . . . . . . . . . . Elektrischer Widerstand und Ohmsches Gesetz Stromleistung und Joulsche Wärme . . . . . . Kirchhoffsche Regeln - Netzwerke . . . . . . . . Innenwiderstand einer Stromquelle . . . . . . . 2 Statische Magnetfelder 2.1 Allgemeines . . . . . . . . . . . . . . . . 2.2 Ampéresches Gesetz . . . . . . . . . . . 2.3 Das Vektorpotential . . . . . . . . . . . 2.4 Biot-Savart-Gesetz . . . . . . . . . . . . 2.5 Magnetfeld spezieller Leitergeometrien 2.5.1 Gerader Leiter . . . . . . . . . . 2.5.2 Lange Spule . . . . . . . . . . . . 2.5.3 Kreisförmige Stromschleife . . . 2.6 Kräfte auf bewegte Ladungen . . . . . 2.7 Magnetische Dipole . . . . . . . . . . . 2.8 Materie im Magnetfeld . . . . . . . . . . 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 2 2 3 3 4 5 . . . . . . . . . . . 6 6 6 7 7 8 8 9 9 9 10 10 1 Der elektrische Strom Ganz allgemein bezeichnet Strom den Transport von elektrischen Ladungen. Die Stromstärke I bezeichnet dabei die Ladungsmenge Q, die pro Zeiteinheit durch eine Querschnittsfläche senkrecht zur Stromrichtung fließt: I= dQ dt 1.1 Stromdichte Eine weitere wichtige Größe in Zusammenhang mit dem elektrischen Strom ist → − die Stromdichte j . Sie bezeichnet den Strom, der durch eine Querschnittsflä→ − cheneinheit senkrecht zu j fließt. Der Gesamtstrom I durch eine geschlossene Oberfläche ergibt sich somit zu: R − → → − I = A j · dA Falls die Stromdichte räumlich konstant ist, ist das Ergebnis: I = j · A. Für einen geraden Leiter mit Querschnittsfläche A und der Teilchendichte n kann man folgendes herleiten: − → v : Geschwindigkeit der Ladungen n: Teilchendichte n = AnzahlderLadungen V olumen In dem Zeitintervall ∆t fließen alle Ladungen, die sich im Volumen ∆V = A · ∆t · v befinden durch den Querschnitt A. Somit ergibt sich für die Stromstärke: I = nqAv Für die Stromdichte folgt dann: → − → j = nq − v Definiert man die Ladungsdichte ρel = nq, so erhält man: → − → j = ρel − v 1.2 Kontinuitätsgleichung R − → → − Der Strom durch eine geschlossene Oberfläche ( A j · d A ) ist gleich der negativen R zeitlichen Abnahme der von der Oberfläche eingeschlossenen Ladung (Q = V ρel dV ). Also: R H − → → − d j · d A = − ρ dV dt V el A Mit dem Satz von Gauß (s. Elektrostatik) folgt dann die Kontinuitätsgleichung: → − ∂ div j = − ∂t ρel „Ladung kann weder erzeugt noch vernichtet werden.“ 2 1.3 Elektrischer Widerstand und Ohmsches Gesetz Auch ohne äußeres Feld bewegen sich die Ladungsträger in einem Leiter. Diese sogenannte thermische Geschwindigkeit, von Elektronen beispielsweise, ist meist sehr hoch. Allerdings stoßen sie dabei ständig mit Nachbarteilchen zusammen und ändern dabei ihre Richtung, sodass die Geschwindigkeitsverteilung und auch die Stromdichte im Mittel null ergibt. Legt man jedoch ein äußeres elektrisches Feld an, so werden die Ladungsträger zwischen zwei Stößen (das heißt während der Streuzeit τS ) immer in dieselbe Richtung beschleunigt, sodass sich dadurch die sogenannte Driftgeschwindigkeit (vD = q·E τ ) ergibt, m S die letztendlich auch für den Stromfluss verantwortlich ist. Diese Driftgeschwindigkeit ist erstaunlich klein (also nicht über das Ergebnis wundern)!! Die Stromdichte lässt sich dann in Abhängigkeit von der Driftgeschwindigkeit schreiben als: 2 → − j = nq − v→ = ρ · − v→ = nq τS · E D el D m nq 2 τS m Definiert man die elektrische Leitfähigkeit σel = erhält man das Ohmsche Gesetz: → − → − j = σel · E (materialabhängig), so Für einen homogenen Leiter mit Querschnitt A und Länge L gilt: R U = E dL = E · L R− → → − I = j · dA = j · A Hieraus folgt dann für den elektrischen Widerstand R: L R = ρs A ρs ist der spezifische Widerstand = Kehrwert der elektrischen Leitfähigkeit Diese Formel gilt allerdings nur für ohmsche Leiter, das heißt Leiter, bei denen die elektrische Leitfähigkeit bzw. der spezifische Widerstand weder von der angelegten Spannung, noch von der Stromstärke abhängt. Entlang eines Leiters, durch den ein Strom I fließt, tritt ein Potentialgefälle, zwischen einem Ende und dem betrachteten Ort x auf: U (x) = φ1 − φ(x) = R · I · 1.4 x L Stromleistung und Joulsche Wärme Beim Transport von elektrischen Ladungen (zum Beispiel von einem Ende eines Leiters zum anderen) wird die Arbeit W verrichtet: W = Q(φ1 − φ2 ) = Q · U Für die elektrische Leistung folgt dann: P = dW dt = d (Q dt · U) = dQ dt ·U P =U ·I (falls U und I zeitlich konstant) Diese Leistung entspricht der Verlustleistung, die in einem Ohmschen Widerstand in Joulsche Wärme umgewandelt wird: P = I · U = I 2R = 3 U2 R 1.5 Kirchhoffsche Regeln - Netzwerke In der Realität treten meist ganze Netzwerke, also Reihen- und Parallelschaltungen von Leitern auf. Zur Berechnung von Strömen und Spannungen in diesen Netzwerken verwendet man die Kirchhoffschen Regeln 1.Kirchhoffsche Regel (Knotenregel) Verzweigen sich mehrere Leiter in einem Punkt (Knoten), do muss die Summe der einlaufenden Ströme gleich der Summe der auslaufenden Ströme sein. Der Grund hierfür ist in der Kontinuitätsgleichung zu sehen: legt man um den Knoten eine Kugelschale, so muss genausoviel Ladung hinein- wie hinausfließen, da Ladungen ja weder erzeugt noch vernichtet werden können. P Ik = 0 2.Kirchhoffsche Regel (Maschenregel) In jedem geschlossenen Stromkreis (und in jeder Masche) ist die Summe aller Spannungen gleich null. Bei dieser Rechnung wird die Generatorspannung miteinbezogen, erhält als im Normalfall das entgegengesetzte Vorzeichen der Verbraucherspannungen. P Uk = 0 a) Reihenschaltung von Widerständen Die Spannungen im Stromkreis werden aufssummiert (Maschenregel): P U0 = U1 + U2 + U3 = (R1 + R2 + R3 )I = ( Rk )I Somit gilt für eine Reihenschaltung von Widerständen: P R = Rk 4 b) Parallelschaltung von Widerständen Hier gilt, dass der Gesamtstrom I gleich der Summe der Ströme in den Zweigen ist (Knotenregel). Zudem gilt: U0 = U1 = U2 , außerdem: U = R · I = R(I1 + I2 ) also U = R( RU1 + RU2 ). Somit gilt für eine Parallelschaltung von Widerständen: 1 R = P 1 Rk c) Allgemeines Rezept zur Berechnung von Netzwerken 1. Ströme in jedem Ast festlegen 2. Maschendurchlaufrichtung festlegen 3. Maschen komplett durchlaufen und Spannungen aufsummieren 4. Knotenregel anwenden Beachte: • Spannungsquellen, die von nach ⊕ durchlaufen werden, werden positiv gezählt • Verbraucher, die in Stromrichtung durchlaufen werden, werden negativ gezählt 1.6 Innenwiderstand einer Stromquelle Jede Stromquelle, besitzt einen sogenannten Innenwiderstand Ri , sodass die tatsächlich nutzbare Spannung U geringer ist, als die von der Quelle erzeugte Klemmspannung. Dabei ist der Betrag der nutzbaren Spannung abhängig von der Größe des Innenwiderstandes Ri und des Lastwiderstandes Ra : a U = U0 RiR+R a 5 2 Statische Magnetfelder 2.1 Allgemeines Zwischen elektrischen und magnetischen Feldern gibt es einige Analogien (gleichnamige Pole stoßen sich ab,...) aber auch einige wichtige Unterschiede. Besonders zu betonen ist hierbei, dass es keine isolierten magnetischen Pole, also keine magnetischen Monopole gibt, und dass magnetische Feldlinien immer geschlossen sind. Grundlegende Größen beim Betrachten von Magnetfeldern sin die magnetische → − → − Flussdichte B und die magnetische Feldstärke H . Es gilt der Zusammenhang: − → → − B = µ0 · H → − − → (Meist wird jedoch B als magnetische Feldstärke bezeichnet und H stattdessen als magnetische Erregung) 2.2 Ampéresches Gesetz Jeder elektrische Strom erzeugt ein Magnetfeld. Je nach Geometrie des stromdurchflossenen Leiters unterscheiden sich auch die dadurch erzeugten Magnetfelder. R → − → − Analog zum eletrischen Kraftfluss φel = A E · d A wird der magnetische Fluss definiert: R − → − → φm = A B · d A Dieser ist ein Maß für die Zahl der magnetischen Feldlinien durch die Fläche A. Da magnetische Feldlinien immer geschlossen sind, müssen auch durch eine geschlossenen Oberfläche A immer genausoviele ein- wie austreten. Also: H − → − → B · dA ≡ 0 A Wendet man nun noch den Gauß’schen Satz an: H − → − → R → − B · d A = V div B dV ≡ 0 A → − ⇒ div B = 0 „Es gibt keine magnetische Monopole“ → − Man beachte hier den Unterschied zum elektrischen Fall: div E = ρ0 , wobei ρ die Ladungsdichte ist. Im magnetischen Fall kommen Nord- und Südpol also nie getrennt vor!! H− → → Während im eletrostatischen Fall E · d− s = 0 (konserv. Kraftfeld!!), gilt dies für das magnetische Feld nicht mehr. Experimentell findet man das Ampére’sche Gesetz: H→ H− − − → − H · d→ s = I bzw. B · d→ s = µ0 I Integrationsweg umschließt Fläche, die von I durchflossen wird. 6 Bereits bekannt ist: I= R→ → H→ − − − − j d A = H d→ s Hieraus erhält man durch Anwendung des Stoke’schen Satzes: H− R → − → → → v d− s = rot− v dA µ0 R→ R → H→ − − → − − → − − j d A = H d→ s = rot B d A → − → − rot B = µ0 j 2.3 Das Vektorpotential → − →→ − → → Für das elektrische Feld E gab es ein skalares Potential φ(− r ) mit E (− r ) = −grad φ(− r ). Nun stellt sich die Frage, ob auch für das magnetische Feld ein Potential existiert, aus →→ − dem sich B (− r ) berechnen lässt. H− → → Aufgrund dessen, dass B · d− s = µ0 I auch 6= 0 sein kann, folgt dass es kein magne→− − → → tisches Potential mit B ( r ) = −gradφ(− r ) geben kann, denn ansonsten müsste gelten: → − rot B ≡ 0, was aber ebenfalls 6= 0 sein kann. →→ − Stattdessen wird das sogenannte Vektorpotential A (− r ) definiert: − → → − B = rot A − → → − → − A erfüllt automatisch div B = 0. Allerdings ist zu bedenken, dass A noch nicht eindeutig − → − → bestimmt ist: Sei A0 = A + grad f : − → → − → − → − div B = ∇ · (∇ × A0 ) = ∇ · (∇ × ( A + grad f )) = ∇ · (∇ × A ) + ∇ · (∇ × grad f ) ≡ 0 − → → − → − Somit erzeugen sowohl A , als auch A0 dasselbe Magnetfeld B . Um dies zu vermeiden, stellt man eine Eichbedingung, (für stationäre = zeitunabhängige Felder) die CoulombEichung: → − div A = 0 2.4 Biot-Savart-Gesetz → Im elektrischen Fall war es möglich aus einer beliebigen Ladungsverteilung ρ(− r ) das elektrische Potential φel zu berechnen. Ein solcher Zusammenhang besteht auch für das magnetische Feld: − − → → A(R) = µ0 4π R 7 − − → j (→ r) dV → − − ( R −→ r) Die Integration erfolgt hierbei über das gesamte stromführende Volumen. Mit der bereits → − → − →− − → bekannten Relation B = rot A lässt sich nun auch B ( R ) leicht bestimmen: − − → → B(R) = µ0 4π R → → − − − → r )×( R −− r) j (→ dV → − − → ( R − r )3 Mit dieser Formel kann man das Magnetfeld einer beliebigen Stromverteilung bestimmen, allerdings kann das Lösen des Volumenintegrals dabei auch beliebig kompliziert werden. Eine Vereinfachung liefert die Betrachtung von Stromfluss in dünnen Drähten. In diesem Fall berechnet sich → → → − → − − → j · dV = j · d A · d− s = I · d− s → − da j über der Querschnittsfläche A praktisch konstant ist. Somit reduziert sich das Volumenintegral auf ein einfaches Linienintegral und man erhält das Biot-Savart-Gesetz: R − − → → µ0 B ( R ) = − 4π ·I · − → − → r ×d− s R −→ → − − → ( R − r )2 2.5 Magnetfeld spezieller Leitergeometrien 2.5.1 Gerader Leiter Für diese Anordnung ist es sinnvoll, mit dem Ampéreschen Gesetz zu arbeiten: H− → − B d→ s = µ0 I Der Integrationsweg umschließt dabei die Fläche, die von I durchflossen wird. Praktischerweise integriert man also auf einer Kreislinie und es ergibt sich: H− R 2π → − B d→ s = 0 B · r · dϕ = 2πr · B(r) = µ0 I ⇒ B(r) = µ0 I 2πr Dasselbe Ergebnis erhält man auch mit dem Biot-Savart-Gesetz, doch ist die Rechnung komplizierter: − → − → ( R − r ) = sin β · dz = cos α · dz Da r = R cos α und z = R · tan α ⇒ dz = R cosdα2 α ⇒B= µ0 I 4πR R π 2 − π2 8 cos α = µ0 I 2πR 2.5.2 Lange Spule H→ RB RC RD RA − − B d→ s = A Bds + B Bds + C Bds + D Bds Legt man BC unendlich weit vom Spulenmittelpunkt entfernt und beachtet, dass RB RD A Bds = − C Bds, so bleibt übrig: RA D Bds = L · B = µ0 · N · I B= 2.5.3 µ0 N L ·I Kreisförmige Stromschleife Für eine kreisförmige Leiterschleife, die in der x-y-Ebene liegt und vom Strom I durch→ − flossen wird, besitzt das B -Feld nur eine z-Komponente: B(z) = µ0 IR2 3 2(R2 +z 2 ) 2 2.6 Kräfte auf bewegte Ladungen Bewegen sich elektrische Ladungen im Magnetfeld, so tritt neben er bereits bekannten Coulomb-Kraft noch eine weitere Kraft auf, die Lorentzkraft. − → → − → F = q(− v × B) Beachtet man auch ein evetuell vorhandenes elektrisches Feld, so erhält man die allgemeine Lorentzkraft: − → → − → − → F = q( E + (− v × B )) Strom in einem Leiter ist nichts anderes als bewegte Ladung, sodass auf einen geraden stromführenden Draht der Länge L im homogenen Magnetfeld ebenfalls die Lorentzkraft wirkt: − → → − − → F = I( L × B ) Bei der Berechnung der Hall-Spannung, die zur Messung von Magnetfeldern verwendet wird, geht man von einem Gleichgewicht zwischen Coulomb-Kraft und Lorentzkraft aus und gelangt zu (n: Teilchendichte): 9 UH = EH b = I nqd ·B 2.7 Magnetische Dipole − Zunächst definieren wir das magnetische Dipolmoment → pm → − − → pm =I· A → − als Produkt von Stromstärke I und der vom Strom I umflossenen Fläche A. A ist dabei der Flächennormalenvektor und bildet mit I eine Rechtsschraube. Bringt man nun eine rechteckige stromdurchflossene Leiterschleife in ein Magnetfeld, so bewirkt die auftretende Lorentzkraft → − → − F = aI(êa × B ) Kraft auf Leiterstücke b wird von der Aufhängung abgefangen ein Drehmoment: − → → − → − → − − → → D =− r × F = (2 2b êb ) × (Ia(êa × B )) = I · ( A × B ) → → − → − ⇒ D =− pm×B 2.8 Materie im Magnetfeld In einer Spule mit N Windungen und Länge L, die vom Strom I durchflossen wird, existiert im Inneren ein Magnetfeld: B0 = µ0 N L ·I Wird nun der Innenraum der Spule mit Materie gefüllt, so stellt man fest, dass sich der magnetische Kraftfluss R− → − → φm = B · d A → − um den Faktor µ verändert. Da die Fläche A konstant ist, muss also für B gelten: − → → − → − B = B 0 µ = µµ0 H 0 µ heißt relative Permeabilität und ist materialabhängig. Ähnlich dem elektrischen Feld mit elektrischer Polarisierung findet auch hier eine ma→ gnetische Polarisierung statt, das heißt atomare magnetische Momente − p m werden in der Materie erzeugt bzw. ausgerichet, was zu einer Magnetisierung M der Materie führt: 10 − → M= 1 V P− → pm Für das Magnetfeld gilt dann: − → → − − → B = µ0 ( H 0 + M ) wobei − → → − M = χ · H0 Der Proportionalitätsfaktor χ heißt magnetische Suszeptibilität und kann bei gegebenem µ berechnet werden: µ=1+χ Je nach Wert von χ unterscheidet man verschiedene Stoffe: Diamagnetische Stoffe Paramagnetische Stoffe Ferromagnete Antiferromagnete χ<0 χ>0 χ>0 χ<0 |χ| 1 |χ| 1 |χ| 1 |χ| 1 schwach abstoßende Wirkung schwach anziehende Wirkung stark anziehend stark abstoßend 11