Weg- und Drehwinkelmessung
Werbung

HSD
Hochschule
FB E I
Düsseldorf
Fachbereich
Elektro- und
Informationstechnik
Praktikum Sensorsysteme
Weg- und Drehwinkelmessung
(Differentialtransformator/LVDT, Präzisionspotentiometer)
Datum:
+s
LVDT
Teilnehmer
WS/SS 201..
Name
Gruppe:
Matr.-Nr.
U
1
2
3
Testat
–s
ϕ
Labor für Sensorsysteme
Prof. Dr. Lauffs · BSc. Moudeni
Raum 5.4.49 · Tel.: 0211 / 4351-2321, -2320
Praktikum Sensorsysteme: Weg- und Drehwinkelmessung
Seite 1
1. Grundlagen
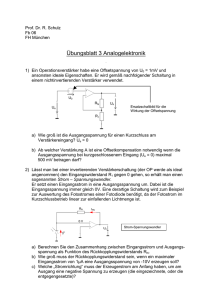
Zur Erfassung und Umformung eines Weges s oder eines Drehwinkels α in ein elektrisches Signal werden oft potentiometrische oder transformatorische Sensoren eingesetzt.
1.1 potentiometrische Wegaufnehmer: Linearpotentiometer
Die Messgröße (der Weg s) wird über die Schleiferstellung eines Linearpotentiometers erfasst:
1
Potentiometer
widerstand
UB
Betriebsspannung
RP
R(s)
smax
1:∞
RP
RL = 1:10
1:2
U(s)
UB
0,5
1:1
5:1
s
U(s)
RL
Lastwiderstand
10 :1
0
0
0,5
s
s
max
1
Bild 1: Schaltung/Kennlinien eines Wegaufnehmers mit verstellbarem Widerstandsabgriff
Der Teilwiderstand R(s) soll linear vom Weg s abhängig sein:
R( s ) =
s
⋅R
smax P
Als belasteter Spannungsteiler geschaltet, ist der Zusammenhang zwischen Teilspannung U(s) und Weg s:
s
smax
U (s ) =
1+
RP
RL
2
s − s
smax smax
⋅U B
Kennlinien und Formel zeigen, dass die Linearität der Wegmessung vom Belastungswiderstand RL abhängig ist.
1.2 Drehwinkelaufnehmer
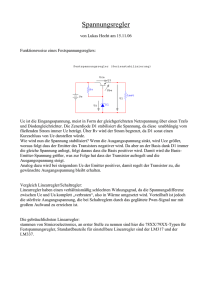
In potentiometrischen Drehwinkelaufnehmern greift der Schleifer eine winkelproportionale Teilspannung ab:
1 Ringkörper
2 Widerstandswicklung
3 Schleifbürste
4 Gabelkupplung
A1...A3 Anschlussklemmen
α Drehwinkel
RP Potentiometerwiderstand
R(α) Teilwiderstand
UB Betriebsspannung
U(α) Teilspannung
Bild 2: potentiometrischer Drehwinkelaufnehmer, Drahtpotentiometer, Aufbau und Anschlüsse
Zur Verbindung an die winkelgebende Mechanik ist manchmal eine Kuplung (z.B. eine Gabelkupplung – wie im Bild) unvermeidlich, deren mechanisches Spiel oft Hysteresefehler verursacht.
Praktikum Sensorsysteme: Weg- und Drehwinkelmessung
Seite 2
Abhängig vom Durchmesser des für die Ringkörperbewicklung verwendeten Widerstandsdrahtes hat das dargestellte Drahtpotentiometer nur eine endliche Widerstandsauflösung: die kleinste Widerstandsänderung ist ∆R(α)min ≠ 0 Ω. Dafür zeichnet sich diese Bauart durch einen sehr linearen Widerstandsverlauf R(α) aus, weil Widerstandsdraht sich sehr präzise herstellen und aufwickeln läßt.
Im Vergleich dazu haben Potentiometer mit einer Widerstandsschicht eine schlechtere Linearität, aber eine fast ideale Auflösung. Sogenannte Hybridpotentiometer, eine Kombination aus Draht- und Schichtpotentiometer, vereinen die Vorteile beider
Bauarten. Der im Versuch eingesetzte Drehwinkelaufnehmer ist ein Drahtpotentiometer.
Wenn der Teilwiderstand R(α) linear vom Drehwinkel abhängt:
R(α ) =
α
α max
⋅ RP
,
ist bei Belastung des Schleifers mit einem Lastwiderstand RL (ähnlich wie beim Linearpotentiometer):
α
α max
U (α ) =
1+
RP
RL
2
α − α
α max α max
⋅U B
1.3 Meßschaltung für potentiometrische Weg- oder Winkelaufnehmer
Zur Nullpunkt- und Empfindlichkeitsjustierung kann ein potentiometrischer Sensor nach Bild 3 in eine Brücke eingebaut
werden. Durch Variation der Widerstände R1 bis R4 lässt sich ein eingeschränkter Weg/Winkelbereich auf einen
gewünschten Ausgangsspannungsbereich U(s, α) abbilden.
R1
s, α
RP
R1
Ua(s, α)
R3
αmax
UB
RP
αmin
(Nullpunkt)
Betriebsspannung
Ri
R2
R4
R2
RA
RB
R3
R4
Bild 3: Meßschaltung für potentiometrische Sensoren
So soll im Versuch eine symmetrische Brückenschaltung mit einem potentiometrischen Drehwinkelaufnehmer aufgebaut
werden, die bei Änderung des Drehwinkels zwischen αmin und αmax eine Ausgangsspannung zwischen Ua(α = αmin) = 0 V
und Ua(α = αmax) abgibt.
Wenn die Brücke symmetrisch sein soll, müssen im Nullpunkt bei α = αmin die Teilwiderstände RA = RB = R3 = R4 sein.
Bei der Bemessung der Betriebsspannung UB hilft folgende Überlegung weiter: zwischen den Potentiometerabgriffen bei
αmax und αmin muß die Spannung Ua(αmax) - Ua(αmin) liegen.
Eine mögliche Belastung der Brückenschaltung durch den Innenwiderstand Ri des Voltmeter beeinträchtigt auch hier die
Lineariät der Messung. Im Gegensatz zu Bild 1 verschwindet dieser Fehler nur bei abgeglichener Brücke, wenn mit Ua = 0 V
auch der Strom durch Ri verschwindet.
Praktikum Sensorsysteme: Weg- und Drehwinkelmessung
Seite 3
1.4 Transformatorische Wegaufnehmer: Differentialtransformatoren (LVDT)
In einem LVDT (Linearer Variabel Differential-Transformator) ist eine Primärspule über einen hochpermeablen (µr >>1)
Kern variabel mit zwei Sekundärspulen gekoppelt (Bild 4). Bei Speisung der Primärspule mit einer Wechselspannung Upri
im Frequenzbereich 50 Hz ... 20 kHz werden in den Sekundärspulen die Spannungen Usek1 und Usek2 induziert.
Die Punkte an den Spulenanschlüssen kennzeichnen die Anfänge gleichsinnig gewickelter Spulen und sollen die Erkennung
der Phasenlage erleichtern: Zeigt der Zählpfeil der Primärspannung vom Punkt weg, so gilt dies auch für die Zählpfeile der
Sekundärspannungen.
Aufbau
Schaltzeichen
s
s
Sekundärspule 1
Usek1
µr
>>1
Primärspule
Usek1
-Usek2
Upri
Usek2
Sekundärspule 2
-s
-s
Bild 4: Aufbau und Schaltzeichen eines LVDT
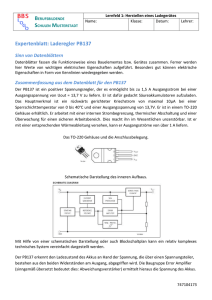
Bei Verschiebung des Kerns wird die Kopplung der Primärspule zu einer Sekundärspule größer, zur anderen kleiner. Deshalb sind |Usek1| und |Usek2| gegensätzlich vom Weg s abhängig (Bild 5a). In Mittelstellung des Kerns (s = 0 mm) ist
|Usek1| = |Usek2|. Werden die beiden Sekundärspulen gegenphasig in Reihe geschaltet, so sollte die resultierende Ausgangsspannung Usek1 - Usek2 in Mittelstellung des Kerns gleich 0 V sein. Aufgrund von Phasenfehlern (Bild 5c) sind die beiden
Sekundärspannungen aber nicht immer exakt gleichphasig und es verbleibt eine minmale Restspannung mit einer Phase von
ca. 90°.
U
_________U
5a
5b
5c
|Usek2|
|Usek1|
|Usek1-Usek2|
aufgrund von Phasenfehlern
verbleibende Restspannung UR
einfache
Gleichrichtung
-Usek2
|Usek1| = |Usek2|
UR
Restspannung UR
s
s
Synchrongleichrichtung
Diskriminatorkurve
Ua
Upri
Im
Re
Meßbereich
Bild 5: LVDT-Signale
Usek1
Wird die Differenzspannung Usek1 - Usek2 ohne Berücksichtigung der Phasenlage gleichgerichtet (z.B. mit einem einfachen
Wechselspannungsmeßgerät, das nur den Betrag |Usek1 - Usek2| anzeigt), so läßt sich nicht mehr feststellen, ob der Kern
nach oben oder unten verschoben wird – die Wegmessung ist nicht mehr eindeutig (5b). Außerdem erreicht die gleichgerichtete Spannung aufgrund der Phasenfehler in Mittelstellung des Kerns nicht mehr den Wert 0 V – ausgerechnet in der Nullposition hat der LVDT damit einen verhältnismäßig großen Nullpunktfehler, der sich erst bei großen Wegen relativiert.
Beide Probleme lösen sich, wenn ein Synchrongleichrichter nur den Realteil der Differenzspannung Re{Usek1 - Usek2} phasenrichtig gleichgerichtet. Der Synchrongleichrichter (in der Nachrichtentechnik auch als Synchrondemodulator bezeichnet)
Synchrongleichrichter
s > 0 mm
Tiefpaß
Usek1-Usek2
2 fo
Usek1
+1
fg << 2 fo
+1
-1
-1
Upri
fo =
20 Hz
.... 20 kHz
Komparator
(Rechteckformer)
Usek2
LVDT
Ua(s)
× (+1)
× (-1)
ϕ
Phasenschieber
Bild 6: LVDT-Beschaltung mit Synchrongleichrichter, Signalverläufe für s > 0 mm (wegen s > 0 mm ist Usek1 > Usek2!)
Lauffs
Praktikum Sensorsysteme: Weg- und Drehwinkelmessung
Seite 4
ist im Prinzip ein Multiplizierer. Er multipliziert die Signalspannung Usek1 - Usek2 mit +1 oder -1, abhängig vom Vorzeichen des Synchronsignals, das aus der primären Speisespannung über einen Phasenschieber und einen Komparator erzeugt
wird (Bild 6). Bei s > 0 mm werden die positiven Halbwellen der Signalspannung mit +1 multipliziert, die negativen mit -1.
Als Ergebnis gibt der Multiplizierer positve Halbwellen mit der Frequenz 2 fo ab, aus denen ein Tiefpaßfilter den positiven
Gleichanteil ausfiltert.
Die Ausgangsspannung Ua(s) ist eine nur noch sehr schwach (in der Darstellung übertrieben stark) mit 2 fo pulsierende
Gleichspannung. Glättung und Antwortverhalten hängen entscheidend von Grenzfrequenz und Typ des Tiefpaßfilters ab: Eine niedrige Grenzfrequenz fg filtert verbleibende Wechselanteile besser aus, macht das Gesamtsystem aber auch träger. Der
Typ des Tiefpaßfilters beeinflußt z.B. die Sprungantwort auf einen abrupten Weganstieg ∆s.
Bei s < 0 mm werden die negativen Halbwellen der Signalspannung mit +1 multipliziert, die positiven mit -1. Der Multiplizierer gibt negative Halbwellen ab, aus denen ein Tiefpaß den negativen Gleichanteil ausfiltert (Bild 7):
Synchrongleichrichter
2 fo
Tiefpaß
Usek1-Usek2
s < 0 mm
Ua(s)
Usek1
+1
fg << 2 fo
+1
-1
-1
× (-1)
Upri
fo =
20 Hz
.... 20 kHz
Komparator
(Rechteckformer)
Usek2
LVDT
× (+1)
ϕ
Phasenschieber
Bild 7: Signalverläufe für s < 0 mm
Das Synchrongleichrichter-Tiefpaß-System reagiert nur auf Eingangssignale, die die gleiche Frequenz, aber auch die gleiche
Phase wie das Synchronsignal haben! Sogenannte orthogonale Signale mit einer Phasenverschiebung von ± 90º hinterlassen
hinter dem Synchrongleichrichter nur ein reines Wechselspannungssignal ohne Gleichanteil und hinter dem Tiefpaß eine
Ausgangsspannung von 0 V. Deshalb verschwindet durch die Synchrongleichrichtung auch die bei einfacher Gleichrichtung
auftretende Restspannung UR. Zwischen positiven und negativen Wegen s, d.h. beim Durchgang des Kerns durch die Mittelstellung, wird die Ausgangsspannung darum den Wert 0 V durchlaufen, selbst wenn |Usek1 - Usek2| nicht 0 V erreicht.
Weil die Ausgangsspannung Ua(s) nur dann ihre maximale Amplitude erreicht, wenn die Signalspannung Usek1 - Usek2
exakt phasenrichtig gleichgerichtet wird, sollte immer ein Phasenabgleich mit Hilfe des Phasenschiebers ausgeführt werden.
In der Realität muß der Phasenschieber nur geringe Phasenfehler zwischen dem Meßsignalzweig und dem Synchronsignalzweig kompensieren. Im Praktikumsversuch hat er zu Demonstrationszwecken einen Einstellbereich bis 90°. Bild 8 veranschaulicht, wie der Mittelwert der Spannung am Multipliziererausgang und die Gleichspannunng am Tiefpaßausgang verschwinden, wenn das Synchronsignal 90° Phasenverschiebung gegenüber der Signalspannung Usek1 - Usek2 hat.
Synchrongleichrichter
s > 0 mm
Tiefpaß
2 fo
Usek1-Usek2
Ua(s)
Usek1
+1
-1
fg << 2 fo
+1
-1
-1
Upri
fo =
20 Hz
.... 20 kHz
Komparator
(Rechteckformer)
Usek2
LVDT
× (-1)
× (+1)
× (-1)
90°
ϕ
Phasenschieber
Bild 8: Signalverläufe für s > 0 mm sowie für ϕ = 90°
Die gleichgerichteten Ausgangsspannung Ua(s) zeigt über dem Weg den Verlauf einer sogenannten Diskriminatorkurve mit
zwei Extremwerten und einem Wendepunkt bei s = 0 mm. Zwischen den beiden Extremwerten ist die Wegmessung eindeutig. Die beste Linearität besteht um den Wendepunkt herum. Abhängig von der geforderten Linearität ist der Meßbereich auf
einen Abschnitt zwischen den beiden Extremwerten begrenzt (Bild 5b) . Die LVDT-Hersteller verstehen es heute, durch geschickte Aufteilung der Primär- und Sekundärwicklungen die Linearität in diesem Abschnitt zu optimieren.
Lauffs
Praktikum Sensorsysteme: Weg- und Drehwinkelmessung
Seite 5
2. Aufgabenstellung und Versuchsdurchführung:
2.1 Winkelmessung mit einem Drahtpotentiometer
Versuchsobjekt ist ein Drahtpotentiometer mit Winkelskalierung. Anfang und Ende der Widerstandswicklung sowie der verstellbare Mittelabgriff sind auf 4mm-Anschlussbuchsen herausgeführt.
Zur Versuchsdurchführung stehen zur Verfügung: Digitale und analoge Vielfachmessinstrumente; ein stabilisiertes
Netzgerät für die Betriebsgleichspannung; diverse Widerstandsdekaden.
Es sind folgende Aufgaben zu lösen:
1. Aufnahme der Widerstandskennlinie R(α) sowie Messung der Widerstandsauflösung ∆R(α)min
2. Auswertung: Zusammenfassung der Eigenschaften des Potentiometers
3. Dimensionierung und Versuchsaufbau einer Brückenschaltung unter Einsatz des Dahtpotentiometers
4. Aufnahme der Kennlinie Ua(α ) der Brückenausgangsspannung für zwei Belastungsfälle
5. Bestimmung des maximalen absoluten und relativen Fehlers der Brückenausgangsspannung Ua(α )
6. Untersuchung des Betriebsspannungseinflusses Ua(UB) und des Lastwiderstandseinflusses Ua(RL)
2.1.1 Aufnahme der Widerstandskennlinie R(α) sowie Messung der Widerstandsauflösung ∆ R(α)min:
R(α)-Kennlinie gemäß folgender Messtabelle mit geeignetem Messgerät aufnehmen (1. mit steigenden und 2. mit fallenden Winkeln α).
Verwendetes Messgerät (Ohmmeter): ............................................................................
α
0°
30°
60°
90°
120°
150°
180°
210°
240°
270°
300°
330°
3...°
R(α)/Ω
steigend
R(α)/Ω
fallend
Die Messwerte sind zur Diagrammerstellung in die vorbereitete EXCEL-Tabelle 1 einzugeben.
Die minimalen Widerstandssprünge (Auflösung) sind bei R(α) ≈ 100 Ω im 200 Ω-Bereich des Ohmmeters zu messen!
Widerstandsauflösung ∆R(α)min = ............................ Ω
2.1.2 Auswertung:
Eigenschaften des Potentiometers. Wie groß sind :
a) Der Potentiometerwiderstand:
RP = ............................ Ω
b) Der Nullpunktfehler (bei 0°):
R(α = 0°) = ................. Ω
c) Die Empfindlichkeit:
EP = ............................ Ω / °
d) Die Winkelauflösung:
∆αmin = ........................ °
e) Der (max.) Linearitätsfehler: ............... Ω
bzw. ............... ° bzw. ............... % (bezogen auf den Skalenendwert)
............... Ω
bzw. ............... ° bzw. ............... % (bezogen auf den Skalenendwert)
f) Der Hysteresefehler:
Praktikum Sensorsysteme: Weg- und Drehwinkelmessung
Seite 6
2.1.3 Dimensionierung und Versuchsaufbau einer Brückenschaltung unter Einsatz des Drahtpotentiometers
Es ist eine symmetrische Brückenschaltung mit den Vorgaben nach folgender Abbildung zu dimensionieren:
RA
α
180°
90°
UB
Betriebsspannung
* Die Belastung der Brücke ist
vom Voltmeter-Typ abhängig:
Ua(α = 90°) = 0,0V
Ua(α =180°) = 0,9V
RP
R3
Ua(α)
Ia
(1)
*
(2)
R4
Ri
R2
Belastungsfall a):
Digitalmultimeter (DMM)
als Voltmeter mit Ri = 10 MΩ
Belastungsfall b):
Drehspulmeßgerät als Voltmeter
mit Ri = 50 kΩ im 1,5 V-Bereich
(parallelgeschaltet zum DMM)
Volt- und Amperemeter können für die Berechnung als ideal angesetzt werden. Berechnen Sie:
RA = ........................... Ω
R3 = ........................... Ω
R2 = ........................... Ω
R4 = ........................... Ω
sowie die Betriebsspannung der Brücke:
UB = ........................... V
Bauen Sie die Schaltung auf. Für die Widerstände R2 bis R4 benutzen Sie Widerstandsdekaden. Als Meßgeräte setzen Sie
zunächst nur Digitalmultimeter ein. Stellen Sie die berechneten Widerstandswerte ein und legen Sie die berechnete
Betriebsspannung an. Führen Sie dann einen Nullabgleich durch, indem Sie R3 und R4 wechselweise so variieren, daß
R3 + R4 konstant bleibt. Wenn Sie korrekt gerechnet haben, sollten kleine Variationen ausreichen.
2.1.4 Aufnahme der Kennlinien Ua(α) für zwei Belastungsfälle
Nehmen Sie die Kennlinien für die Belastungsfälle a) und b) auf. Für den Lastfall b) schalten Sie das Drehspulmeßgerät im
1,5V-Meßbereich parallel zum DMM-Voltmeter.
α
90°
100°
110°
120°
130°
140°
150°
Lastfall a)
Ua(α) / V
Lastfall a)
Ia(α) /nA
Lastfall b)
Ua(α) / V
Lastfall b)
Ia(α) /µA
Die Messwerte sind zur Diagrammerstellung in die vorbereitete EXCEL-Tabelle 2 einzugeben.
160°
170°
180°
Praktikum Sensorsysteme: Weg- und Drehwinkelmessung
Seite 7
2.1.5 Auswertung:
Berechnen Sie :
a) Die (bei α = 180° gemessene) Empfindlichkeit:
Lastfall a) E= ............................ mV/ °
Lastfall b) E= ............................ mV/ °
b) Die maximalen absoluten und relativen (auf den Meßbereichsendwert bezogenen) Fehler der Ausgangsspannung:
Lastfall a) ............... mV
bzw. ............... %
Lastfall b) ............... mV
bzw. ............... %
2.1.6 Einflüsse der Betriebsspannung UB und des Belastungswiderstandes RL auf die Ausgangsspannung Ua
a) Wie groß ist der maximale Anzeigefehler ∆Ua max im Belastungsfall a), d.h. für RL = Ri DMM = 10 MΩ, wenn sich die Betriebsspannung der Brücke um ±10% ändert?
∆Ua max(∆UB/UB= ±10%) = ........................... mV
b) Berechnen Sie den maximalen Innenwiderstand RiBr.max der Brückenschaltung (ohne die Meßgeräte!) zwischen den
Klemmen (1) und (2).
Hinweise: Die Spannungsquelle UB kann als ideal angesehen werden. Der Innnenwiderstand RiBr.(α) ist abhänig von α.
Überlegen Sie, für welchen Winkel er den Maximalwert erreicht!
Zeichnen Sie ein Ersatzschaltbild mit einer Leerlaufspannunngsquelle Uo(α), dem als konstant angenommenen MaximalBrückeninnenwiderstand RiBr.max, den Klemmen (1) und (2), der Ausgangsspannung Ua(α) und einem Lastwiderstand RL.
c) Wie groß muss der Lastwiderstand RL mindestens sein, damit der lastabhängige, relative Fehler der Ausgangsspannung
Ua(α) unter 1% bleibt?
(Für Ihre Berechnung können Sie vereinfachend annehmen, daß der Brückeninnenwiderstand RiBr. = RiBr.max = const. ist!)
RL min = ........................... kΩ
Überprüfen Sie Ihr Ergebnis durch Schaltung eines entsprechenden Widerstandes parallel zum DMM-Voltmeter und Messung!
Praktikum Sensorsysteme: Weg- und Drehwinkelmessung
2.2 Wegmessung mit einem
Differentialtransformator (LVDT)
Seite 8
LVDT
Trägerfrequenz Brückenverstärker
+15 V
+5 V
+1
2.2.1 Versuchsvorbereitung
Versorgen Sie zunächst den Trägerfrequenz-Brückenverstärker (TF-Verstärker) aus dem Rahmen-Netzgerät mit
±15 V, bezogen auf die 0 V Masseleitung. Verbinden Sie außerdem die 0 V
Leitung mit der Signalmasse des Oszilloskops, um den TF-Verstärker zu erden.
s
a
➀
c
➁
ϕ
Phasenschieber
➂
Synchrondemodulator
d
➃
Tiefpaß
Gain,
Offset
2 kHz
Oszillator
Speisen Sie die Primärspule a – b des
LVDT mit den zwei phaseninvertierten
Sinus-Wechselspannungen aus den
Ausgängen der beiden Pufferverstärker
hinter dem 2 kHz Sinus-Oszillator. Verbinden Sie das untere Ende der LVDTSekundärspule (Anschluß e) mit 0 V
(Masse).
e
-1
b
0V
−15 V
2.2.2 mechanischer Nullpunkt des Differentialtransformators
Bringen Sie den Tauchanker des LVDT in Mittelstellung. Messen Sie dazu die Differenzspannung der LVDT-Sekundärspulen zwischen den Anschlüssen c – e mit einem Wechselspannungs-Voltmeter, und verschieben Sie den Tauchanker über den
Seilzug solange, bis die Differenzspannung minimal wird. Merken Sie sich diese Stellung als mechanischen Nullpunkt des
Wegaufnehmers und notieren Sie die gemessene Restspannung:
UR eff =
mV
2.2.3 Voreinstellung des TF-Verstärkers
Die erste Einstellung ist bei offenem Eingang des Synchrondemodulators durchzuführen, die Anschlüsse c und ➁ dürfen also noch nicht verbunden sein!
Stellen Sie die Verstärkung (Gain) auf Maximum. Justieren Sie die Ausgangsgleichspannung Ua hinter dem Tiefpaß des
TF-Verstärkers (Meßpunkt ➃) mittels des "Offset"-Knopfes auf 0 V.
Verbinden Sie jetzt den LVDT mit dem Synchrondemodulator (c – ➁). Verschieben Sie den Tauchanker um ca. 2 cm und
stellen Sie die Phasenverschiebung ϕ so ein, daß die Ausgangsgleichspannung Ua ihr Maximum erreicht. Das Signal wird
nun phasenrichtig gleichgerichtet; der Phasenfehler ist ∆ϕ = 0º.
2.2.4 Untersuchung der Signale des TF-Brückenverstärkers bei phasenrichtiger Gleichrichtung
Stellen Sie auf dem ersten Kanal (CH1) des Vierkanal-Oszilloskops die LVDT-Speisespannung (gemessen zwischen Meßpunkt ➀ und 0V) und auf dem zweiten Kanal (CH2) die LVDT-Ausgangsspannung (gemessen zwischen Meßunkt ➁ und
0V) dar. Triggern Sie das Oszilloskop über den zweiten Kanal (CH2) so, daß der Nulldurchgang an der steigenden Flanke
der LVDT-Ausgangsspannung am linken Bildrand liegt. Beachten Sie die Phasenverschiebung zwischen Primär- und Sekundärseite!
Verbinden Sie den Ausgang des Synchrondemodulators (Meßpunkt ➂ ) mit Kanal 3 (CH3) und den Ausgang des Tiefpaßfilters (Meßpunkt ➃ ) mit Kanal 4 (CH4) des Oszilloskops.
Beobachten Sie nun die Signale an den Meßpunkten ➀, ➁, ➂ und ➃ bei verschiedenen Auslenkungen des LVDT-Tauchankers. Beachten Sie vor allem die phasenrichtige Gleichrichtung der auf dem zweiten Kanal dargestellten LVDT-Ausgangsspannung!
Skizzieren Sie auf dem folgenden Blatt die Oszillogramme der Meßpunkte ➀, ➁, ➂ und ➃, gemessen jeweils bei einer Auslenkung des LVDT-Tauchankers um +2 cm sowie um -2 cm vom mechanischen Nullpunkt. Stellen Sie die Zeitablenkung so
ein, daß eine Periode der LVDT-Speisespannung dargestellt wird, und die Y-Empfindlichkeiten so, daß die Bildschirmhöhe
des Oszilloskops möglichst ganz ausgenutzt wird. Reduzieren Sie dazu evtl. auch die Verstärkung des TF-Verstärkers.
Lauffs
Praktikum Sensorsysteme: Weg- und Drehwinkelmessung
Meßpunkt ➀
LVDT-Speisespannung
LVDT-Speisespannung
LVDT-Speisespannung
Meßpunkt ➁
s = 2 cm, ∆ϕ = +90º
Synchrondemodulator-Eingang
Synchrondemodulator-Eingang
Synchrondemodulator-Eingang
Meßpunkt ➂
s = -2 cm, ∆ϕ = 0º
Synchrondemodulator-Ausgang
Synchrondemodulator-Ausgang
Synchrondemodulator-Ausgang
Meßpunkt ➃
s = 2 cm, ∆ϕ = 0º
Seite 9
Tiefpaß-Ausgang
Tiefpaß-Ausgang
Tiefpaß-Ausgang
2.2.5 Einfluß eines Phasenfehlers
Verstellen Sie die Phasenverschiebung jetzt so, daß der Phasenfehler ∆ϕ = +90º beträgt (Die Schaltpunkte im Oszillogramm
des Meßpunktes ➂ sind jetzt nach rechts verschoben.). Skizzieren Sie die Oszillogramme der Meßpunkte ➀, ➁, ➂ und ➃ für
eine Auslenkung s = 2 cm.
Welche Ausgangsgleichspannunng Ua würde sich für einen Phasenfehler ∆ϕ = -90º hinter dem Tiefpaßfilter einstellen?
Lauffs
Praktikum Sensorsysteme: Weg- und Drehwinkelmessung
Seite 10
2.2.6 Aufnahme der Kennlinie des LVDT-Wegaufnehmers
Nehmen Sie die Kennlinie Ua(s) des LVDT-Wegaufnehmers auf. Korrigieren Sie dazu den Phasenfehler wieder auf 0º und
stellen Sie die Verstärkung des TF-Verstärkers so ein, daß die maximale Ausgangsspannung ±10 V nicht überschreitet.
s/mm
Lauffs
Ua / V
s/mm
Ua / V