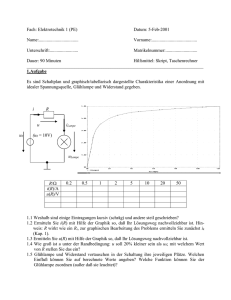
praktikum elektrotechnik
Werbung

PRAKTIKUM ELEKTROTECHNIK Institut für Mikroelektronik und Mikrosensorik 16. Auflage, 2017 Alle Rechte vorbehalten Johannes Kepler Universität Linz, Institut für Mikroelektronik und Mikrosensorik A-4040 Linz • Altenberger Straße 69 • Internet: http://www.ime.jku.at/ • DVR 0093696 Einleitung Dieses Skriptum zum Praktikum Elektrotechnik soll den Studierenden die über die theoretischen Grundkenntnissen aus der Vorlesung hinausgehenden Kenntnisse zur Durchführung der Übungen vermitteln. Auf langwierige Ableitungen und Erklärung von Details ist in den vorliegenden Unterlagen weitgehend verzichtet worden. Sie werden in der angeführten Literatur sowie in entsprechenden Folgevorlesungen behandelt. Falls Sie trotz dieses Skriptums (oder vielleicht gerade deswegen) Probleme mit dem grundlegenden Verständnis haben, wenden Sie sich bitte an einen Übungsbetreuer (wenn möglich schon vor der Übung). Der Schwerpunkt in den Übungen liegt in der praktischen Anwendung einfacher und grundlegender Zusammenhänge. Messtechnische Probleme werden nur soweit behandelt, als sie die Übungsdurchführung direkt betreffen. Da die Zeit bei manchen Übungen knapp bemessen ist, überlegen Sie sich vor den Messungen, welche Messpunkte wirklich interessant sind (sofern diese nicht schon vorgegeben sind), und bauen Sie die Schaltungen möglichst übersichtlich auf, um den Betreuern die Überprüfung zu erleichtern. Organisatorisches Bevor Sie mit Ihrer ersten Übung beginnen, geben Sie bitte die unterschriebene Kenntnisnahme der Sicherheitsbestimmungen beim Übungsleiter ab. Am Beginn jeder Übung findet ein schriftlicher Test zum Stoffgebiet der aktuellen sowie der vorangegangenen Übungen statt (was konsequenterweise auch den Stoff der Vorlesungen und Übungen Elektrotechnik 1 und 2 inkludiert!). Als Vorbereitung dienen die am Ende jedes Kapitels angeführten Kontrollfragen. Ein positives Testergebnis ist für die Übungsdurchführung Voraussetzung. Bei einer negativen Beurteilung werden sie von der weiteren Teilnahme am Praktikum ausgeschlossen. Vor dem ersten Praktikumstermin wird eine Zuteilung der Termine veröffentlicht. Nach dieser Zuteilung ist eine Verschiebung ihrer Termine nur möglich, indem sie ihren Termin mit jemandem tauschen. Derartige Wechsel dürfen sie nach Belieben durchführen, sie müssen jedoch am Beginn der Praktikumsübung den Übungsbetreuer darauf hinweisen. Die Praktikumsübungen werden in Zweiergruppen durchgeführt. Die Einteilung der Gruppen erfolgt jeweils am Beginn einer Übung und gilt nur für die jeweilige Übung. Am Ende jeder Übung ist die Kopie der Mitschrift der Messwerte (Urprotokoll) einem Übungsbetreuer zu übergeben. Während des Praktikums dürfen keine alten Protokolle verwendet werden. Auch beim Verfassen des Protokolls dürfen keine Vorlagen aus früheren Jahrgängen verwendet werden. Beschreiben Sie IHRE Meinung und IHRE Überlegungen. Die Abgabe eines Plagiats führt unweigerlich zu einer negativen Beurteilung. 2 Protokolle Für jede Übung ist von jedem Team ein Protokoll auszuarbeiten, welches spätestens eine Woche nach der Übung abzugeben ist1 . Das Protokoll hat zu enthalten: • Deckblatt (aktuelle Version auf www.ime.jku.at>Teaching>Praktikum Elektrotechnik ) • Aufgabenstellung (kurz und in eigenen Worten, keine Kopie aus dem Skript) • Berechnungen zur Dimensionierung (wenn notwendig) • Messschaltung, Erklärung was, wie und warum so und nicht anders gemessen wurde (wenn notwendig), sowie verwendete Messgeräte • Tabelle mit Messwerten (mit Einheiten!) und daraus berechnete Größen • Berechnungen zur Auswertung der Ergebnisse • Diagramme mit ausreichender Beschriftung, wie in Abbildung 1 gezeigt. • Bemerkungen und Erklärungen (speziell wenn unerwartete Messergebnisse aufgetreten sind, soll versucht werden, diese zu interpretieren). Fertigen sie die Protokolle entsprechend den Richtlinien ab Seite 4 an. Wenn Sie Anregungen, Kritik, Beschwerden usw. bezüglich des Skriptums und der Übungsinhalte haben, ersuchen wir Sie diese zu äußern, damit wir die Qualität der Lehrveranstaltung verbessern können. Bitte nutzen Sie die die Evaluierung der Lehrveranstaltung im KUSSS! 1 Sie können das Protokoll entweder im Sekretariat abgeben oder in den Postkasten des Instituts (im Erdgeschoß, Aufschrift ’Prof. Jakoby’ einwerfen). Laborordnung und Sicherheitsbestimmungen 1. Überprüfen Sie vor dem Übungsbeginn, ob alle Steckbretter und dgl. vollständig bestückt sind. 2. Führen Sie alle Schaltungsum- oder -aufbauten, sofern möglich, im spannungslosen Zustand durch. 3. Bauen Sie die Schaltungen übersichtlich auf und verwenden Sie verschiedenfärbige Leitungen für verschiedene Signale. 4. Beschriften Sie keinenfalls Geräte und berühren sie Oszilloskop und Messgeräte nicht mit Schreibgeräten oder harten Gegeständen. 5. Vermeiden Sie alles, was Geräten und Bauteilen schaden könnte. Eventuell auftretende Schäden sind sofort dem Übungsleiter zu melden. 6. Überprüfen Sie vor dem Einschalten, ob bei den Messgeräten der richtige Messbereich gewählt wurde und ob sie richtig angeschlossen sind. Beachten Sie, dass bei den am Übungsplatz vorhandenen Multimetern die Anschlüsse für Strom- und Spannungsmessung verschiedene sind! 7. Schalten Sie die Multimeter während der Umbauten und am Ende der Übung ab, um Batterie zu sparen. 8. Beachten Sie bei jeder Übungsanordnung die entsprechenden Grenzwerte! 9. Bringen Sie am Ende einer Übung die Steckbretter in jenen Zustand, in dem Sie sie übernommen haben. Der Übungsleiter muss die Vollständigkeit der Messgeräte und Bauelemente kontrollieren. 4 Richtlinien für Praktikumsprotokolle Grundlagen • Schreiben Sie das Protokoll für jemanden, der die theoretischen Grundlagen beherrscht. Geben Sie ihm die Information, die nötig ist, um die Übung in möglichst kurzer Zeit gedanklich oder experimentell nachvollziehen zu können. • Beschreiben Sie kurz die wichtigsten physikalischen Prinzipien und Größen dieser Übung. • Keine allgemeine Lehrbuchtheorie zum Thema, keine Abschreibübung aus der Übungsanleitung. • Geben Sie Gleichungen an, mit denen Sie Ihre Messungen später auswerten. Nummerieren der Formeln erleichtert im Folgenden das Verweisen auf sie. • Keine Ableitungen oder Beweise. (Können eventuell in einem Anhang gebracht werden.) Messschaltung • Skizzieren Sie sauber (mit Lineal) die Messschaltung, ohne Schnörkel (Hinterlegung, Schatten etc.). • Erläutern Sie eventuell notwendige Dimensionierungen. Geräteliste • Eine Liste der verwendeten Messgeräte (Marke, Type, Inventarnummer) ermöglicht es, die verwendeten Geräte wiederzufinden, wenn Unstimmigkeiten bei der Auswertung der Messergebnisse auf einen Instrumentenfehler schließen lassen, oder der Versuch mit denselben Geräten wiederholt werden soll. Messungen • Alle gemessenen Werte müssen im Protokoll angegeben werden, die Angabe von Mittelwerten oder Auswertungsergebnissen reicht nicht (Ausnahme: Messungen am Oszilloskop nicht in Skalenteilen sondern in Sekunden bzw. Volt). Messwerte bestehen immer aus Maßzahl und Einheit. In jeder Tabelle muss daher auch eine Angabe der Einheit vorhanden sein. Einheiten dürfen nach DIN nicht in eckige Klammern gesetzt werden. • Große (> 9999) und kleine (< 0,1) Zahlen werden mit Hilfe von Zehnerpotenzen dargestellt. • Falls Größen aus anderen Quellen stammen (Übungsanleitung, Tabellenwerke, ...), so sind diese Quellen anzugeben. • Während der Übung sind die Messwerte auf Plausibilität zu überprüfen. • Wählen Sie Messpunkte und Messbereich so, dass die Genauigkeit der Messung möglichst hoch ist. 5 • Bei der Berechnung von Größen sind alle verwendeten Formeln anzugeben (oder auf sie zu verweisen). Außerdem ist darauf zu achten, dass alle eingesetzten Werte bekannt sind. Täuschen Sie nicht durch die Angabe vieler Nachkommastellen eine größere Genauigkeit vor, als tatsächlich vorhanden ist. • Gewöhnen Sie sich daran, Formeln vor dem ersten Einsetzen der Messwerte anzuschreiben, auch wenn Sie die Formeln auswendig wissen. Berechnung: Formel allgemein – Zahlen mit Einheiten eingesetzt – Ergebnis mit Einheit. • Oberstes Prinzip ist die Nachvollziehbarkeit: Anhand Ihres Protokolls muss es möglich sein, den gesamten Messvorgang, der zu Ihrem Endergebnis geführt hat, lückenlos zu rekonstruieren (auch noch nach Jahren). Diagramme Abbildung 1: Strom durch eine Halbleiterdiode (Musterdiagramm) • Wahl der Achsen: Abszisse (horizontale Achse): Jene Werte, die vom Experimentator vorgegeben werden (Ursache), Ordinate (vertikale Achse): Jene Werte, die durch den Versuch bestimmt werden (Wirkung). • Jede Achse erhält einen Namen (Größe), eine Einheit, eine Skala und eventuell einen Pfeil für den Wertzuwachs. Größe und Einheit werden entweder durch einen Bruchstrich oder durch das Wort in“ getrennt, die Verwendung eckiger Klammern ” ist nicht erlaubt. Beispiele: U /V, UV , Spannung in Volt, Spannung in V, U in V. • Die Messpunkte werden deutlich markiert (◦, , △,▽, ⋄, ×, +, ...) und eine Ausgleichskurve darübergelegt. • Die Ausgleichskurve muss einer physikalisch sinnvollen Funktion entsprechen. Folglich muss die Ausgleichskurve nicht durch jeden Messpunkt verlaufen (Stichwort Messfehler). • Falls Sie Diagramme von Hand zeichnen, achten Sie auf eine ansprechende Form (glatte Kurven; falls nötig Kurvenlineal und Millimeterpapier benützen). 6 • Offensichtliche Ausreißer werden beim Zeichnen der Kurve nicht berücksichtigt. Stimmt die gemessene Kurve nicht mit der Theorie überein, so ist eine Erklärung anzufügen. • Nach Möglichkeit sollen folgende Maßstäbe verwendet werden: 1 cm = b 1 Einheit, 1 cm = b 2 Einheiten, 1 cm = b 5 Einheiten, sowie Vielfache davon. Nötigenfalls sind die gewählten Maßstäbe anzugeben (sinnvoll z. B. bei Zeigerdiagrammen). • Das Diagramm, sowie bei Kurvenscharen die einzelnen Kurven, sind zu benennen. • Ein sauberes Diagramm, welches händisch mit Hilfe eines Kurvenlineals auf Millimeterpapier gezeichnet wurde, ist einer Computergrafik mit krummen Maßstäben und eckigen Kurven vorzuziehen. • Bei computergenerierten Diagrammen Gitter (Grid) verwenden, Diagrammfläche nicht hinterlegen. Erkenntnisse • Die Ergebnisse der Messungen müssen kommentiert werden. Vor allem bedürfen unerwartete Messergebnisse einer Erklärung. • Die Interpretation der Ergebnisse in eigenen Worten ist (nach der Nachvollziehbarkeit der Experimente) am wichtigsten und für die Beurteilung des Protokolls entscheidend! Äußere Form • Deckblatt (Kopiervorlage liegt dem Skriptum bei) • Aus Gründen der Lesbarkeit ist der Text der Protokolle am Computer zu schreiben. Diagramme (Messaufbau, Oszi–Bilder,...) dürfen von Hand gezeichnet werden (wird aus Zeitgründen auch explizit empfohlen). • Reine Maple- oder Mathematica-Ausdrucke werden nicht akzeptiert, sie können eventuell im Anhang beigelegt werden. • Wählen Sie einen Seitenrand von 2 cm. • Formelzeichen werden kursiv geschrieben, Funktionen (wie cos, ln, ...) und Zahlen werden aufrecht geschrieben. Einheiten werden aufrecht geschrieben. Beispiel: U2 = 12 V. ❳ ✘ ✘ ❳✘ ✘ ❳12 ❳❳ • Einheiten dürfen nicht in Klammern gesetzt werden. Beispiel: ✘ U2✘ = [V] ❳ • Zwischen Zahl und Einheit ist ein Abstand zu lassen, ebenso vor und nach einem Gleichheitszeichen. • Schriftart und Schriftgröße sind in Text und Formeln gleich zu wählen. • Die Protokolle sind im Original abzugeben, Kopien werden nicht angenommen. Auffallende Ähnlichkeiten mit anderen Protokollen führen zu einer negativen Beurteilung. 7 Inhaltsverzeichnis 1 Oszilloskop 1.1 Allgemeines . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.2 Aufbau und Funktionsweise eines analogen Oszilloskops . . . 1.2.1 Elektronenstrahlröhre . . . . . . . . . . . . . . . . . . 1.2.2 Blockschaltbild . . . . . . . . . . . . . . . . . . . . . 1.2.3 Triggerung . . . . . . . . . . . . . . . . . . . . . . . . 1.3 Aufbau und Funktionsweise eines Digitalspeicheroszilloskops 1.3.1 Signalerfassung . . . . . . . . . . . . . . . . . . . . . 1.3.2 Triggerung . . . . . . . . . . . . . . . . . . . . . . . . 1.3.3 Bedienungsgrundlagen . . . . . . . . . . . . . . . . . 1.3.4 Gedehnte Signaldarstellung . . . . . . . . . . . . . . 1.4 Messmethoden . . . . . . . . . . . . . . . . . . . . . . . . . 1.4.1 yt-Betrieb . . . . . . . . . . . . . . . . . . . . . . . . 1.4.2 xy-Betrieb . . . . . . . . . . . . . . . . . . . . . . . . 1.5 Zeigerdiagramme . . . . . . . . . . . . . . . . . . . . . . . . 1.6 Hinweis zur Genauigkeit von Ergebnissen . . . . . . . . . . . 1.7 Serien– und Parallelersatzschaltung . . . . . . . . . . . . . . 1.7.1 Kapazitive Phasenverschiebung . . . . . . . . . . . . 1.7.2 Induktive Phasenverschiebung . . . . . . . . . . . . . 1.7.3 Allgemeines . . . . . . . . . . . . . . . . . . . . . . . 1.8 Übungsdurchführung . . . . . . . . . . . . . . . . . . . . . . 1.8.1 Ausmessen einer symmetrischen Rechteckspannung . 1.8.2 Laden und Entladen eines Kondensators . . . . . . . 1.8.3 R, L und C im Wechselstromkreis . . . . . . . . . . . 1.8.4 RLC–Kombination . . . . . . . . . . . . . . . . . . . 1.8.5 Schaltvorgang an einer RLC–Kombination . . . . . . 1.8.6 Ausmessen einer unbekannten Kombination . . . . . 1.8.7 Beobachten von nichtlinearem Verhalten . . . . . . . 1.9 Fragen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 9 10 10 10 12 13 13 14 15 21 22 22 23 24 25 26 27 29 31 32 32 32 34 35 35 36 36 37 2 Netzwerke und Drehstrom 2.1 Ersatzspannungsquelle . . . . . . . . . . . . . 2.1.1 Theorie . . . . . . . . . . . . . . . . . 2.1.2 Spannungs– und stromrichtiges Messen 2.2 Leistungsanpassung . . . . . . . . . . . . . . . 2.3 Spannungsteiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41 41 41 43 44 45 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 INHALTSVERZEICHNIS 2.4 2.5 2.6 2.7 2.8 2.9 2.3.1 Unbelasteter und belasteter Spannungsteiler . . . . . . . Frequenzunabhängiger Spannungsteiler . . . . . . . . . . . . . . 2.4.1 Theorie . . . . . . . . . . . . . . . . . . . . . . . . . . . Wechselstrom . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.5.1 Wechselstromkenngrößen . . . . . . . . . . . . . . . . . . Leistungsmessung bei Sinusgrößen . . . . . . . . . . . . . . . . . Dreiphasenwechselstrom . . . . . . . . . . . . . . . . . . . . . . 2.7.1 Einführung . . . . . . . . . . . . . . . . . . . . . . . . . 2.7.2 Spannungen und Phasenlage . . . . . . . . . . . . . . . . 2.7.3 Leistungsmessung in Dreileitersystemen - Aronschaltung Übungsdurchführung . . . . . . . . . . . . . . . . . . . . . . . . 2.8.1 Leistungsanpassung . . . . . . . . . . . . . . . . . . . . . 2.8.2 Spannungsteiler . . . . . . . . . . . . . . . . . . . . . . . 2.8.3 Frequenzkompensierter Spannungsteiler . . . . . . . . . . 2.8.4 Effektivwertmessung . . . . . . . . . . . . . . . . . . . . 2.8.5 Sternschaltung . . . . . . . . . . . . . . . . . . . . . . . 2.8.6 Dreieckschaltung . . . . . . . . . . . . . . . . . . . . . . Fragen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 Transformator 3.1 Theoretische Grundlagen des Transformators . . . . . . . 3.1.1 Idealer Transformator . . . . . . . . . . . . . . . 3.1.2 Ersatzschaltbild des realen Transformators . . . . 3.2 Übungsdurchführung . . . . . . . . . . . . . . . . . . . . 3.2.1 Bestimmen des Transformator–Ersatzschaltbildes 3.2.2 Eigenbau–Trafo . . . . . . . . . . . . . . . . . . . 3.3 Fragen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 Filter und Schwingkreise 4.1 Allgemeines . . . . . . . . . . . . . . . . . 4.1.1 Dämpfungsmaß und Bodediagramm 4.1.2 Bandbreite und Grenzfrequenz . . . 4.2 Filter . . . . . . . . . . . . . . . . . . . . . 4.3 Schwingkreise . . . . . . . . . . . . . . . . 4.3.1 Parallelschwingkreis . . . . . . . . . 4.3.2 Serienschwingkreis . . . . . . . . . 4.4 Übungsdurchführung . . . . . . . . . . . . 4.4.1 Tiefpass . . . . . . . . . . . . . . . 4.4.2 Serienschwingkreis . . . . . . . . . 4.4.3 Bandpass . . . . . . . . . . . . . . 4.5 Fragen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45 45 45 47 47 48 49 49 50 51 53 53 53 53 54 54 55 56 . . . . . . . 61 61 61 62 67 67 69 70 . . . . . . . . . . . . 73 73 73 73 74 75 75 76 76 76 77 77 78 9 Kapitel 1 Oszilloskop 1.1 Allgemeines Das Oszilloskop (kurz: Oszi) ist eines der wichtigsten Messgeräte in der Elektrotechnik. Es dient zur Darstellung von elektrischen Signalen (in der Regel zeitabhängige Signale) auf einem Bildschirm. Damit lassen sich • Signalformen bestimmen (z.B. Sinus, Rechteck, Dreieck. . . ) • Impulse vermessen (z.B. wie lange ist ein Impuls, welche Amplitude hat er...) • Frequenzen ermitteln (z.B. mit welcher Wiederholrate tritt ein Impuls auf). Es lassen sich aber auch Zusammenhänge zwischen Signalen herstellen: • Sind zwei Signale synchron? Haben sie die gleiche Frequenz? • Gibt es eine Zeitverzögerung oder Phasenverschiebung zwischen den Signalen? • Frequenzgänge vermessen (z.B. Ausgangssignal zu Eingangssignal eines Filters) Im Gegensatz zu anderen Messgeräten steht bei Oszilloskopen nicht die Genauigkeit der gemessenen Amplituden im Vordergrund. Vielmehr ist die maximal darstellbare Frequenz sowie die Anzahl der gleichzeitig messbaren Signale (Kanäle) ein Qualitätskriterium. Als Bildschirm wurde ursprünglich eine Braun’sche Röhre (1897 von Karl Ferdinand Braun entwickelt) verwendet, moderne Oszilloskope arbeiten hingegen fast ausschließlich digital und stellen die Signale auf grafischen Displays dar. Um die Funktionsweise zu verdeutlichen wird sowohl der Aufbau eines analogen Oszis (mit einer Braun’scher Röhre) als auch die Funktionen eines digitalen (Speicher-) Oszis beschrieben. Im Praktikum wird ein digitales Oszilloskop verwendet (Tektronix TDS 1002). 10 KAPITEL 1. OSZILLOSKOP 1.2 1.2.1 Aufbau und Funktionsweise eines analogen Oszilloskops Elektronenstrahlröhre Eine Oszilloskopröhre besteht aus dem Elektronenstrahlerzeugungssystem, den Ablenksystemen in horizontaler (x) und vertikaler (y) Richtung und dem Leuchtschirm. Abbildung 1.1 zeigt die Anordnung dieser Komponenten in einem evakuierten Glaskolben. Abbildung 1.1: Aufbau einer Oszilloskopröhre Die geheizte Kathode emittiert Elektronen. Diese werden durch die Anode beschleunigt und durch diverse Elektroden auf dem Leuchtschirm fokussiert, wo sie Leuchterscheinungen hervorrufen. Die Ablenkung des Strahls wird durch ein elektrisches Feld bewerkstelligt. Zu diesem Zweck sind zwei Plattenpaare, je eines für die x- und die y-Ablenkung, vorgesehen. Im Normalbetrieb wird an die y-Platten eine Spannung angelegt, welche der zu messenden Spannung proportional ist, und an die x-Platten eine Spannung, welche der Zeit proportional ist (lineare Rampe). 1.2.2 Blockschaltbild Abbildung 1.2 zeigt die wichtigsten Komponenten eines Zweikanaloszilloskops mit den Eingängen y1 (CH1) und y2 (CH2) sowie einem externen Triggereingang (EXT. TRIG.). Die Funktionen der einzelnen Baugruppen sind: • Eingangswahlschalter: Er erlaubt die Erdung (GND) der Eingangsstufe um die Nulllinie am Schirm einstellen zu können, die direkte Kopplung des Messsignales (DC ... Direct Current, Gleichstrom) und die Kopplung über einen Kondensator (AC ... Alternating Current, Wechselstrom). Letztere Möglichkeit wird bei der Messung von Wechselsignalen, welchen ein Gleichspannungsanteil überlagert ist, verwendet. Dadurch bleibt der Gleichanteil bei der Anzeige unberücksichtigt und es können auch sehr kleine Wechselanteile gemessen werden. Allerdings kommt es bei niederfrequenten Signalen zu einer Verfälschung der Kurvenform. 1.2. AUFBAU UND FUNKTIONSWEISE EINES ANALOGEN OSZILLOSKOPS 11 Abbildung 1.2: Blockschaltbild eines Zweikanaloszilloskops • Bereichsumschalter: Er dient der Anpassung des Eingangssignals an den Eingang des Oszilloskops. Ein grober stufiger Abschwächer ist in Spannung pro Rastereinheit kalibriert, ein fein einstellbarer Verstärker oder Abschwächer erlaubt die stufenlose Skalierung der Anzeige. Allerdings ist bei Verwendung dieser Feineinstellung (VAR) die Kalibrierung der Eingangsempfindlichkeit nicht gegeben (UNCAL). • Vertikalverstärker und Horizontalverstärker: Um die für die Ablenkung des Elektronenstrahls nötigen hohen Spannungen zu erreichen sind geeignete Verstärkerstufen vorgesehen. • Kanalumschalter: Der Benutzer kann auswählen, welches der beiden Eingangssignale er am Bildschirm betrachten will. Da für die Vertikalablenkung nur ein Plattenpaar vorgesehen ist, muss zwischen den beiden Kanälen umgeschaltet werden. Um dennoch beide Kurven gleichzeitig am Schirm anzuzeigen gibt es zwei Möglichkeiten: Bei der ersten Variante werden die beiden Signale abwechselnd (ALTernating) dargestellt. Durch das Nachleuchten des Bildschirms entsteht für den Betrachter ein Bild mit zwei unabhängigen Signalverläufen. Sind die Signalfrequenzen sehr niedrig kommt es jedoch zu Flimmereffekten. Die andere Möglichkeit ist während eines Strahldurchlaufs permanent zwischen den beiden Signalen hin und herzuschalten, wodurch die Signale in kurze Stücke ”‘zerhackt”’ (CHOPped) werden. Diese Methode eigent sich gut für langsame Signale. Weiters kann man die Signale beider Kanäle addieren (y1 + y2 ) oder durch zusätzliches Invertieren eines Kanals subtrahieren (y1 − y2 ). • Triggereinheit: Sie dient der zeitlichen Abstimmung der Zeitablenkung mit dem Messsignal. Es kann auf y1 (CH1 ... Channel 1), y2 (CH2 ... Channel 2) oder auf ein anderes Signal (EXT ... Extern) getriggert werden. Bei der Triggerung auf die steigende Flanke (↑) wird bei jedem Überschreiten des Triggerpegels ein Triggerimpuls erzeugt, bei der Triggerung auf die fallende Flanke (↓) bei jedem Unterschreiten. Die Höhe des Triggerpegels kann eingestellt werden (LEVEL). Bei normaler Triggerung (NORM) bleibt der Schirm beim Ausbleiben von Triggerimpulsen finster, bei 12 KAPITEL 1. OSZILLOSKOP automatischer Triggerung (AUTO) läuft der Zeitablenkgenerator in diesem Fall frei und erzeugt ein durchlaufendes Bild. • Zeilenablenkgenerator: Um den Elektronenstrahl in horizontaler Richtung zu bewegen, muss eine mit der Zeit linear ansteigende Spannung generiert werden. Beim Auftreten eines Triggerimpulses startet der Zeilenablenkgenerator einen Durchlauf einer Sägezahnspannung mit einstellbarer Anstiegszeit (Zeitbasis kalibriert in Zeit pro Rastereinheit). Dadurch bewegt sich der Strahl mit konstanter Geschwindigkeit von links nach rechts und sehr schnell wieder zurück. • Dunkeltastung: Um den Strahl beim Rücklauf und beim Warten auf ein neues Triggerereignis unsichtbar zu machen, wird eine negative Spannung an den Wehneltzylinder des Strahlerzeugungssystems (Z-Modulation) gelegt. Dadurch wird der Elektronenstrahl abgeschaltet (dunkelgetastet). 1.2.3 Triggerung Das Zusammenspiel von Trigger und Zeitablenkung zeigen die Diagramme in Abbildung 1.3. In diesem Beispiel sei die Triggerung auf die positive Flanke gewählt. Befindet sich der Strahl dunkelgetastet in Warteposition, so wird beim Auftreten eines Triggerimpulses der Sägezahn der Zeitablenkung gestartet und der Strahl hellgetastet. Triggerereignisse, die während eines Strahldurchlaufs stattfinden, werden ignoriert. Nach einem vollständigen Durchlauf wird der Strahl dunkelgetastet und wieder in die Anfangsposition gebracht. Bei periodischer Wiederholung dieses Vorgangs ergibt sich ein stehendes Schirmbild. Das analoge Oszilloskop ist daher nur für die Betrachtung periodischer Signale geeignet. Abbildung 1.3: Zeitdiagramme von Messsignal, Trigger, Zeitablenkung und Dunkeltastung sowie resultierendes Schirmbild 1.3. AUFBAU UND FUNKTIONSWEISE EINES DIGITALSPEICHEROSZILLOSKOPS 1.3 1.3.1 13 Aufbau und Funktionsweise eines Digitalspeicheroszilloskops Signalerfassung Die Funktionsweise eines digitalen Speicheroszilloskops (DSO) unterscheidet sich grundlegend von der eines analogen Oszis. Die Eingangssignale werden von Analog-DigitalWandlern digitalisiert, anschließend gespeichert und auf einem LCD-Display als Kurvenzug angezeigt. Im Erfassungsmodus ist festgelegt, auf welche Weise das Signal digitalisiert wird. Die Einstellung der Zeitbasis beeinflusst die Zeitdauer und Detailgenauigkeit der Erfassung. Erfassungsmodi Es gibt drei Erfassungsmodi: Sample (Abtasten), Pk Detect (Spitzenwert) und Mittelwert. Abtasten (Sample) : Bei diesem Erfassungsmodus wird das Signal vom Oszilloskop in regelmäßigen Zeitabständen abgetastet und als Kurvenzug dargestellt. In diesem Modus werden Signale meistens sehr präzise wiedergegeben, es werden jedoch keine schnellen Signalschwankungen erfasst, die zwischen den einzelnen Abtastungen auftreten können. Dies kann zu Aliasing führen, so dass schmale Impulse möglicherweise nicht erkannt werden. In diesem Fall sollten Sie den Spitzenwerterfassungsmodus zur Erfassung der Daten verwenden. Spitzenwerterfassung: Bei diesem Erfassungsmodus zeichnet das Oszilloskop die höchsten und niedrigsten Werte des Eingangssignals in jedem Abtastintervall auf und stellt sie als Kurvenzug dar. Auf diese Weise kann das Oszilloskop schmale Impulse erfassen und anzeigen, die im Abtastmodus womöglich gar nicht entdeckt worden wären. Störrauschen tritt in diesem Modus stärker in Erscheinung. Mittelwert: In diesem Modus erfasst das Oszilloskop mehrere Perioden eines Signals, bildet daraus eine Mittelwertkurve und zeigt diese an. Dadurch lässt sich unkorreliertes Rauschen reduzieren. Zeitbasis Das Oszilloskop digitalisiert Signale, indem es den Wert eines Eingangssignals an einzelnen Punkten erfasst. Anhand der Zeitbasis lässt sich festlegen, wie oft die Werte digitalisiert werden. Zur Einstellung der Zeitbasis auf eine für Ihre Zwecke geeignete Horizontalskala verwenden Sie den Drehknopf SEC/DIV. Zeitbereichs-Aliasing Aliasing tritt dann auf, wenn das Oszilloskop das Signal nicht schnell genug abtastet, um eine genaue Signalaufzeichnung darzustellen. In diesem Fall zeigt das Oszilloskop ein Signal mit einer niedrigeren Frequenz an als das tatsächliche Eingangssignal oder stellt trotz Triggerung ein instabiles Signal dar. Der Aliasing–Effekt ist in Abbildung 1.4 dargestellt. Zur Vermeidung von Aliasing muss das Oszilloskop das Signal mehr als doppelt so 14 KAPITEL 1. OSZILLOSKOP Abbildung 1.4: Aliasing durch Unterabtastung schnell abtasten wie die höchste Frequenzkomponente des Signals. Die höchste Frequenz, welche bei gegebener Oszilloskop–Abtastrate theoretisch dargestellt werden kann, wird als Nyquist-Frequenz bezeichnet. Die Abtastrate wird als Nyquist–Rate bezeichnet und beträgt das Doppelte der Nyquist–Frequenz. 1.3.2 Triggerung Einer der wichtigsten Unterschiede zwischen analogem und digitalem Oszi ist die Triggerung. Beim analogen Oszi kann nur betrachtet werden, was nach einem Triggerereignis passiert (da der Strahl ja immer mit dem Trigger startet). Digitale Oszilloskope können auch Signalverläufe vor einem Trigger (pre–trigger) darstellen, indem während dem Warten auf das Triggerereignis die Signale laufend gespeichert werden. Erst nach dem Auftreten des Triggerereignisses wird die Kurvenform angezeigt. Ein weiterer Vorteil digitaler Oszilloskope ist, dass auch nicht periodische Signale betrachtet werden können. Ein einmal gespeichertes Signal kann beliebig lange auf dem Bildschirm dargestellt werden. Dazu wird die folgende Sequenz nur einmal durchlaufen (SINGLE SEQ), im RUN–Modus wird die Sequenz endlos wiederholt, das Oszi arbeitet vergleichbar einem analogen Gerät. 1. Es werden genügend Daten erfasst, um den Teil der Signalaufzeichnung links vom Triggerpunkt auszufüllen. Dies wird auch als Vortrigger bezeichnet. 2. Es werden fortlaufend Daten erfasst, während das Oszilloskop auf das Auftreten der Triggerbedingung wartet. 3. Die Triggerbedingung wird erkannt. 4. Es werden weiterhin Daten erfasst, bis die Signalaufzeichnung abgeschlossen ist. 5. Das neu erfasste Signal wird angezeigt. Quelle Die Option Trigger–Quelle wird benutzt, um das Signal auszuwählen, welches das Oszilloskop als Trigger verwendet. Die Quelle kann ein beliebiges Signal sein, das über den Kanal-BNC-Stecker oder über den EXT TRIG–BNC–Stecker eingespeist wird. Der Trigger kann auch von der Netzversorgung abgeleitet werden (nur bei Flankentriggern verfügbar). 1.3. AUFBAU UND FUNKTIONSWEISE EINES DIGITALSPEICHEROSZILLOSKOPS 15 Arten Das Oszilloskop verfügt über drei Trigger-Arten: Flanke, Video und Impulsbreite. Modi Sie können einen Trigger–Modus auswählen, um festzulegen, wie das Oszilloskop Daten erfassen soll, wenn es keine Triggerbedingung erkennt. Im Normal–Modus wird nur bei einem realen Triggerereignis die Triggerung ausgelöst, das aufgenommene Signal wird bis zum nächsten Triggerereignis am Bildschirm angezeigt. Im Auto–Modus wird auch ein Trigger ausgelöst, wenn eine gewisse Zeit kein Triggerereignis stattfand. Dadurch bleibt ein einmal aufgezeichnetes Signal nicht beliebig lange am Bildschirm und der Benutzer kann erkennen, dass kein Triggerereignis mehr auftritt. Kopplung Mit der Option Trigger–Kopplung können Sie bestimmen, welcher Signalteil zur Triggerschaltung geleitet werden soll. Auf diese Weise läßt sich das Signal stabiler anzeigen. Zur Verwendung der Trigger–Kopplung drücken Sie die Taste TRIG MENÜ und wählen einen Flanken– oder Impulstrigger sowie eine Kopplungsoption aus. Um das konditionierte Signal anzuzeigen, das zur Triggerschaltung geleitet wird, halten Sie die Taste TRIG VIEW gedrückt. Position Durch Einstellung der horizontalen Position wird die Zeit zwischen dem Trigger und der Bildschirmmitte festgesetzt. Flanke und Pegel Die Bedienelemente Flanke und Pegel helfen bei der Trigger–Definition. Mit der Option Flanke (nur bei Flankentriggern verfügbar) wird festgelegt, ob der Triggerpunkt auf der steigenden oder abfallenden Flanke liegen soll. Über den Drehknopf TRIGGERPEGEL wird eingestellt, wo der Triggerpunkt auf der Flanke erscheint. 1.3.3 Bedienungsgrundlagen Die Front des TDS 1002 ist in der Abbildung 1.5 dargestellt. Anzeigebereich Zusätzlich zur Anzeige des Signals selbst enthält der Anzeigebereich eine Fülle von Details über das Signal sowie die Oszilloskopeinstellungen. In Abbildung 1.6 bedeuten die Zahlen folgendes: 1: Das angezeigte Symbol steht für den Erfassungsmodus: Abtastmodus, Spitzenwertmodus und Mittelwertmodus. 2: Der Triggerstatus weist auf folgendes hin: 16 KAPITEL 1. OSZILLOSKOP Abbildung 1.5: Front des TDS 1002 • Armed: Das Oszilloskop erfasst Vortrigger-Daten. In diesem Zustand werden sämtliche Trigger ignoriert. • Ready: Alle Vortrigger–Daten wurden erfasst, das Oszilloskop ist jetzt zur Trigger–Erkennung bereit. • Triggered: Das Oszilloskop hat einen Trigger erkannt und erfasst jetzt die Nachtrigger–Daten. • Stop: Das Oszilloskop hat die Erfassung der Signaldaten beendet. • Acquisition complete: Das Oszilloskop hat eine Einzelfolgeerfassung abgeschlossen. • Scan: Signaldaten werden im Abtastmodus vom Oszilloskop kontinuierlich erfasst und angezeigt. 3: Der Marker zeigt die horizontale Triggerposition an. Drehen Sie den Knopf HORIZONTAL POSITION, um die Position des Markers einzustellen. 4: Die Anzeige zeigt die Zeit in der Rastermitte bezogen auf die horizontale Triggerposition an. Die Triggerzeit ist Null. 5: Der Marker zeigt den Flanken- oder Impulsbreitentriggerpegel an. 6: Bildschirmmarkierungen zeigen die erdbezogenen Messpunkte der angezeigten Signale. Falls keine Markierung vorliegt, wird der Kanal nicht angezeigt. 7: Ein Pfeilsymbol weist darauf hin, dass das Signal invertiert wird. 8: Die vertikalen Skalenfaktoren der Kanäle werden angezeigt. 9: Das BW–Symbol deutet darauf hin, daß die Bandbreite dieses Kanals begrenzt wurde. 10: Anzeige zeigt die Einstellung der Hauptzeitbasis (Main Time Base) an. 1.3. AUFBAU UND FUNKTIONSWEISE EINES DIGITALSPEICHEROSZILLOSKOPS 17 Abbildung 1.6: Schirmbild des TDS 1002 11: Anzeige zeigt die Fenstereinstellung der Zeitbasis an, wenn diese verwendet wird. 12: Anzeige zeigt die zur Triggerung verwendete Triggerquelle an. 13: Das Symbol steht für die jeweils ausgewählte Trigger-Art: Flankentrigger auf der steigenden Flanke Flankentrigger auf der fallenden Flanke Videotrigger auf der Zeilensynchronisation Videotrigger auf der Halbbildsynchronisation Impulsbreiten-Trigger, positive Polarität Impulsbreiten-Trigger, negative Polarität 14: Die Anzeige zeigt den Flanken- oder Impulsbreitentriggerpegel an. 15 : Im Anzeigebereich erscheinen Meldungen, die Ihnen weiterhelfen sollen. Manche werden allerdings nur drei Sekunden lang angezeigt. Wenn Sie ein gespeichertes Signal abrufen, werden Informationen zum Referenzsignal angezeigt, z.B. RefA 1,00 V 50 µs. 16: Anzeige zeigt die Triggerfrequenz an. Vertikale Bedienelemente Im Folgenden sind die Bedienelemente nach Abbildung 1.7 erklärt. CH 1, CH 2, CURSOR 1 und CURSOR 2 POSITION: Positioniert das Signal vertikal. Wenn Sie Cursor anzeigen und verwenden, leuchtet die LED, um auf die alternative Funktion der Drehknöpfe zum Verschieben der Cursor hinzuweisen. 18 KAPITEL 1. OSZILLOSKOP Abbildung 1.7: Bedienelemente für die Vertikalablenkung CH 1, CH 2 MENÜ: Zeigt die Auswahl im vertikalen Menü an und schaltet die Anzeige des Kanalsignals ein und aus. VOLTS/DIV (CH 1, CH 2): Dient zur Auswahl der kalibrierten Skalenfaktoren. MENÜ MATH: Ruft das Menü für mathematische Signaloperationen auf und lässt sich zum Ein- und Ausschalten des berechneten Signals verwenden. Horizontale Bedienelemente Im Folgenden sind die Bedienelemente nach Abbildung 1.8 erklärt. Abbildung 1.8: Bedienelemente für die Zeitablenkung POSITION: Dient zur Einstellung der horizontalen Position aller Kanäle und berechneten Signale. Die Auflösung dieses Drehknopfes variiert je nach Zeitbasis-Einstellung. MENÜ HORIZ: Ruft das horizontale Menü auf. 1.3. AUFBAU UND FUNKTIONSWEISE EINES DIGITALSPEICHEROSZILLOSKOPS 19 AUF NULL SETZEN: Setzt die Horizontalposition auf Null. SEC/DIV: Dient zur Auswahl der horizontalen Zeit/div (Skalenfaktor) für die Hauptoder Fensterzeitbasis. Wenn der Zoombereich aktiviert ist, wird die Breite des Zoombereichs durch Änderung der Fensterzeitbasis geändert. Trigger-Steuerung Für die Einstellung des Triggers sind die Bedienelemente von Abbildung 1.9 notwendig. Abbildung 1.9: Bedienelemente für die Trigger-Steuerung PEGEL und ERWEITERT: Bei Verwendung eines Flankentriggers besteht die Hauptfunktion des Drehknopfes PEGEL darin, die Amplitude einzustellen, die das Signal zum Auslösen einer Erfassung durchlaufen muss. Außerdem wird der Drehknopf ERWEITERT zur Durchführung erweiterter Alternativfunktionen verwendet. Die LED unter dem Drehknopf leuchtet, wenn eine alternative Funktion aktiviert ist. MENÜ TRIG: Ruft das Trigger-Menü auf. AUF 50 % SETZEN: Der Triggerpegel wird auf den vertikalen Mittelpunkt zwischen den Spitzenwerten des Triggersignals gesetzt. TRIG ZWANG: Schließt die Erfassung ab, ganz gleich ob ein adäquates Triggersignal vorliegt oder nicht. Wenn die Erfassung bereits angehalten wurde, hat diese Taste keinerlei Auswirkungen. TRIG ANZEIGE: Wenn Sie die Taste TRIG ANZEIGE gedrückt halten, wird statt des Kanalsignals das Triggersignal angezeigt. So können Sie beispielsweise feststellen, wie sich die Triggereinstellungen z.B. bei Triggerkopplung auf das Triggersignal auswirken. 20 KAPITEL 1. OSZILLOSKOP Menü- und Steuerungstasten Abbildung 1.10 zeigt die Tasten zum Aufrufen der Menüs und zur Steuerung der Oszilloskopfunktionen. Abbildung 1.10: Bedienelemente für die Trigger-Steuerung SPEICHERN/ABRUFEN: Ruft das Menü Speichern/Abrufen für Einstellungen und Signale auf. MESSUNG: Ruft das Menü für automatische Messungen auf. ERFASSUNG: Ruft das Menü Erfassung auf. DISPLAY: Ruft das Menü Display auf. CURSOR: Ruft das Menü Cursor auf. Über die Drehknöpfe für die vertikale Position läßt sich die Cursorposition einstellen, während das Cursor-Menü angezeigt wird und die Cursor aktiviert werden. Die Cursor werden auch nach Verlassen des CursorMenüs angezeigt (es sei denn, die Cursor-Option wurde auf AUS gestellt), lassen sich aber nicht einstellen. DIENSTPGM: Ruft das Menü Dienstprogramm auf. HILFE: Ruft das Menü Hilfe auf. GRUNDEINSTELLUNG: Ruft die werkseitige Einstellung ab. AUTO-SETUP: Das Oszilloskop wird automatisch so eingestellt, dass eine verwertbare Anzeige der Eingangssignale stattfindet. EINZELFOLGE: Das Oszilloskop erfasst eine Einzelfolge und hält dann an. RUN/STOP: Das Oszilloskop erfasst Signaldaten kontinuierlich oder hält die Erfassung an. DRUCKEN: Startet Druckvorgänge. Zum Drucken ist das Erweiterungsmodul mit Centronics” , RS-232- oder GPIB-Schnittstelle erforderlich. 1.3. AUFBAU UND FUNKTIONSWEISE EINES DIGITALSPEICHEROSZILLOSKOPS 21 Abbildung 1.11: Anschlussbuchsen Anschlüsse Die Anschlüsse des Oszilloskops sind in Abbildung 1.11 dargestellt. TASTKOPF ABGL: Ausgang und Erdung für die Spannungstastkopfkompensation. Wird verwendet, um den Tastkopf mit der Eingangsschaltung des Oszilloskops abzugleichen. Die Erdung für die Tastkopfkompensation und die Abschirmung der BNC-Stecker sind mit der Stromnetzerdung verbunden und fungieren als Erdungsklemmen. CH 1, CH 2: Eingangsstecker zur Anzeige von Signalen. EXT TRIG: Eingangsstecker für eine externe Triggerquelle. Verwenden Sie das TriggerMenü, um die Triggerquelle Ext. oder Ext./5 auszuwählen. VORSICHT: Wenn Sie eine Spannungsquelle an eine Erdungsklemme oder den Außenleiter einer BNC-Buchse (Koaxialstecker) anschließen, kann das Oszilloskop oder der Prüfaufbau beschädigt werden. Schließen Sie daher keinesfalls eine Spannungsquelle an eine Erdungsklemme oder den Außenleiter einer BNC-Buchse an! 1.3.4 Gedehnte Signaldarstellung Bei einem analogen Oszilloskop kann ein Signaldetail, welches eine bestimmte Zeit nach dem Triggerzeitpunkt auftritt, durch eine verzögerte Zeitbasis gedehnt dargestellt werden. Dabei wird zuerst die Verzögerungszeit (= Zeit zwischen Triggerzeitpunkt und interessantem Signaldetail) gesucht (Search) und eingestellt (Delay). Die Darstellung am Schirm beginnt dann erst verzögert zum eingestellten Zeitpunkt. Jetzt kann die Zeitablenkung gedehnt werden, um das gewünschte Detail in einer höheren Zeitauflösung darzustellen. Beim Digitaloszilloskop wird diese Betriebsart im Horizontalmenü eingestellt und funktioniert, obwohl digital realisiert, ähnlich. Ein großer Vorteil des Digitaloszilloskops ist der Pretrigger. Da die Digitalisierung ständig läuft und bei Auftreten eines Triggerereignisses nach einer gewissen Zeit gestoppt wird, befinden sich auch Daten für die Zeit vor dem Triggerereignis im Speicher. Die Zeitverschiebung zwischen Triggerzeitpunkt und darzustellendem Signalausschnitt kann daher auch negativ eingestellt werden. 22 1.4 1.4.1 KAPITEL 1. OSZILLOSKOP Messmethoden yt-Betrieb Kalibrierte Messung Im Normalbetrieb (yt-Betrieb) können die Zeitverläufe von ein oder zwei Signalen dargestellt und ausgemessen werden. Für Messungen müssen die entsprechenden Rastereinheiten am Schirm abgelesen und mit der eingestellten Eingangsempfindlichkeit beziehungsweise Zeitablenkung multipliziert werden. In diesem Fall müssen die Knöpfe für die variablen Einstellungen auf 1 bzw. CAL gestellt werden. In den folgenden Formeln bedeutet Div“ Rastereinheit (engl. Division“). ” ” U Skalenf aktor U = · (1.1) V Div V/Div t t Skalenf aktor = · s Div s/Div (1.2) Verhältnismessung Die variablen Abbildungsmaßstäbe bei Eingangsempfindlichkeit und Zeitablenkung werden für Verhältnismessungen benötigt. Messung von Anstiegs- und Abfallzeit: Die Anstiegszeit eines Impulses ist definiert durch jene Zeit, in welcher das Signal von 10 % auf 90 % des Gesamthubes ansteigt. Das Oszilloskop ermöglicht auch im Menü Messung die selbständige Messung von Anstiegsund Abfallzeit. Phasenmessung: Zur Messung der Phasenverschiebung zwischen zwei Wechselgrößen gleicher Frequenz betrachtet man gleichwertige Punkte der beiden Größen. Am einfachsten misst man die Nulldurchgänge. Am Analogoszilloskop wird durch Dehnung und Positionierung der Referenzkurve eine vollständige Periode τ auf eine ganze Zahl von Rastereinheiten (z. B. 8) eingestellt. Der Abstand eines Nulldurchganges des Referenzsignales zu jenem des zweiten Signales ergibt die Phasenverschiebung nach folgender Formel: ϕ ϕ = Div τ · 360 Grad Div (1.3) Am Speicheroszilloskop verwendet man die Zeit-Cursor. Zuerst stellt man beide Cursor auf aufeinanderfolgende Nulldurchgänge und misst mit Delta die Periodendauer τ . Danach stellt man den zweiten Cursor auf den Nulldurchgang das zweiten Signales und misst die Zeit t zwischen den Nulldurchgängen des ersten und des zweiten Signales. Die Phasenverschiebung ist dann ϕ t = · 360 (1.4) Grad τ Das Vorzeichen der Phasenverschiebung ergibt sich je nach Vor- oder Nacheilung nach folgender Regel: Tritt der Nulldurchgang des zu messenden Signales nach dem (d. h. rechts 23 1.4. MESSMETHODEN vom) Nulldurchgang des Referenzsignales auf, so ist die Phase negativ. Bei voreilendem Signal ist die Phase positiv (siehe auch Kapitel 1.7). 1.4.2 xy-Betrieb Anstatt die Zeitablenkung zu verwenden, kann auch ein Messsignal an die x-Ablenkung angeschlossen werden. In Verbindung mit einem zweiten Signal an der y-Ablenkung ergibt sich bei der Messung sinusförmiger Größen eine geschlossene Kurve als Schirmbild. Die Umschaltung zwischen xt- und xy-Betrieb geschieht am TDS 1002 im Menü DISPLAY. ACHTUNG: Sind im xy-Betrieb keine Signale vorhanden, so ist am Schirm nur ein Punkt zu sehen. Bei einem Analogoszilloskop mit Kathodenstrahlröhre kommt es dadurch bei normaler Einstellung der Strahlintensität durch die Konzentration des Elektronenstrahles auf eine Stelle zur Zerstörung des Leuchtschirmes! Sollen die Positionen von x- und y-Signal bei der Stellung GND“ des Eingangswahlschalters zentriert werden, so ” muss die Strahlintensität (INTENSITY) verringert werden. Signale gleicher Frequenz Die Phasenverschiebung lässt sich mit der Ellipsenmethode folgendermaßen bestimmen: 1. Erste Spannung U1 · sin(ωt) an den x-Eingang legen; 2. Zweite Spannung U2 · sin(ωt + ϕ) an den y-Eingang legen; 3. Ellipse zentrieren; 4. Zur Messung yx=0 und ymax oder xy=0 und xmax ablesen und Phasenverschiebung nach (1.5) berechnen. sin(ϕ) = yx=0 xy=0 = ymax xmax (1.5) In den Sonderfällen ϕ = 0◦ und ϕ = 180◦ entartet die Ellipse zu einer Geraden. Dies ermöglicht eine einfache Prüfung auf Phasengleichheit. Für voreilendes y erfolgt der Strahlumlauf im Uhrzeigersinn, für nacheilendes y entgegengesetzt. Aus dem Schirmbild ist dies aber wegen der Augenträgheit nicht erkennbar, sodass die Ellipse keine Auskunft über das Vorzeichen des Phasenwinkels gibt. Lissajous-Figuren Sind die Frequenzen von x- und y-Signal (fx und fy ) verschieden, so ergibt sich im allgemeinen kein stehendes Schirmbild. Nur wenn das Verhältnis ffxy rational ist, ergibt sich eine so genannte Lissajous-Figur (Abbildung 1.13). Das Frequenzverhältnis lässt sich aus dem Schirmbild bestimmen. Man zählt die Anzahl der Maxima in x-Richtung (nx , d. h. Stellen mit größtmöglicher x-Auslenkung) und in y-Richtung (ny ) und setzt sie laut Gleichung (1.6) ins Verhältnis. fy ny = fx nx (1.6) 24 KAPITEL 1. OSZILLOSKOP 0 I 0 −1 −1 I θ = π/4 1 0 U θ = π/2 −1 −1 1 1 1 0 0 −1 −1 I I θ=0 1 0 U 1 −1 −1 0 U θ = 3/4 π 1 0 U 1 Abbildung 1.12: xy-Diagramme für unterschiedliche Phasenverschiebungen Abbildung 1.13: Lissajous-Figur für 1.5 fy fx = 3 2 Zeigerdiagramme Mit Zeigerdiagrammen lassen sich die Phasenlage von Strom und Spannung oder die Admittanz /Impedanz einer Schaltung darstellen. Im Strom-/Spannungsdiagramm werden die Amplitude und die Phasenlage von Strom und Spannung durch Zeiger visualisiert. Wichtig ist, dass die Phasendifferenz zwischen Spannung und Strom aus dem Diagramm abgelesen werden kann. Deshalb müssen x- und y-Achse die gleiche Skalierung aufweisen. Diese sollte in einer Art Legende neben dem Diagramm für Strom und Spannung angegeben werden (Bsp: 1cm = ˆ 1V, 1cm = ˆ 2mA). Die Beschriftung der Achsen mit der Skalierung ist nicht sinnvoll, da es schwierig ist, eine Achse mit 2 unterschiedlichen Skalierungen zu beschriften ohne Übersichtlichkeit/Lesbarkeit zu verlieren. In der Regel wird die Phasenlage so gewählt, dass einer der Zeiger auf der x-Achse liegt (Beispiel: siehe Abbildung 1.14). Mit einem Impedanz-/Admittanzdiagramm werden Betrag und Phase der Impedanz/Admittanz 1.6. HINWEIS ZUR GENAUIGKEIT VON ERGEBNISSEN 25 dargestellt. Auch hier ist es wichtig, dass die Phase direkt aus dem Diagramm abgelesen werden kann. Somit müssen reelle und imaginäre Achse die gleiche Skalierung aufweisen (Beispiel: siehe Abbildung 1.15). Im U : 1cm = ˆ 1V I: 1cm = ˆ 2mA U ∆ϕ I Re Abbildung 1.14: Beispiel für ein Strom-/Spannungsdiagramm 140 Im(Z)in Ω 120 100 80 60 40 20 ∆ϕ 0 0 20 40 60 80 Re(Z) in Ω Abbildung 1.15: Beispiel für ein Impedanzdiagrammm 1.6 Hinweis zur Genauigkeit von Ergebnissen Die Genauigkeit einer Messung muss sich auch in Endergebnissen und Rechnungen widerspiegeln. Misst man beispielsweise an einem Widerstand einen Spannungsabfall von 3.7 V, wobei die Spannung auf 0.1 V genau abgelesen werden kann und einen Strom von 10 mA (± 1 mA), so ist es nicht sinnvoll den Widerstand mit mehr als zwei signifikaten Stellen anzugeben (R = 0.37 kΩ). 26 KAPITEL 1. OSZILLOSKOP Mehr Informationen zu dem Thema finden sie beispielsweise unter http://www.physik.uniwuerzburg.de/˜reusch/fehler/wisem0102/vorlesung1.pdf 1.7 Serien– und Parallelersatzschaltung Aus einer Strom–/Spannungsmessung an einem Zweipol geht nicht hervor, ob die Impedanz Z aus in Serie geschalteten oder parallelgeschalteten Elementen besteht. Z lässt sich folgendermaßen als Serienschaltung eines Wirkwiderstandes (ohmschen Widerstandes) R und eines Blindwiderstandes X darstellen: Z= U U cos(ϕZ ) + j sin(ϕZ ) = R + jX I I (1.7) Für die Parallelersatzschaltung ergibt sich die duale Formel für die Admittanz Y als Summe von Wirkleitwert G und Blindleitwert B: Y = I I cos(ϕY ) + j sin(ϕY ) = G + jB U U (1.8) Beim Vorzeichen des Blindanteiles ist zu beachten, dass die Phasenverschiebung ϕ auf die richtige Größe bezogen wird. Die Impedanz errechnet sich aus Spannung durch Strom, daher wird als ϕZ die Phasenverschiebung der Spannung gegen den Strom bezeichnet: ϕZ = ϕU − ϕI (1.9) Bei der Admittanz (Strom durch Spannung) gilt: ϕY = ϕI − ϕU (1.10) Je nach Vorzeichen ist eine Induktivität L oder eine Kapazität C als Realisierung von X bzw. B zu wählen. 1.7. SERIEN– UND PARALLELERSATZSCHALTUNG 1.7.1 27 Kapazitive Phasenverschiebung Kapazitive Phasenverschiebung heißt, dass die Spannung dem Strom nacheilt. Wegen Ũ = Z I˜ ist ϕZ < 0, beziehungsweise wegen I˜ = Y Ũ ist ϕY > 0. Parallelschaltung Abbildung 1.16: Schaltung und Zeigerdiagramme für Admittanz und Strom bzw. Spannung einer Parallelschaltung von Widerstand und Kondensator 1 + jωC R 1 I˜ = + jωC Ũ R Y = (1.11) (1.12) Abbildung 1.17: Zeitdiagramm von Strom und Spannung bei der Parallelschaltung von Widerstand und Kondensator u(t) = Û sin(ωt) , ϕu = 0 i(t) = Iˆ sin(ωt + ϕi ) , ϕi > 0 (1.13) 28 KAPITEL 1. OSZILLOSKOP Serienschaltung Abbildung 1.18: Schaltung und Zeigerdiagramme für Impedanz und Strom bzw. Spannung einer Serienschaltung von Widerstand und Kondensator 1 jωC j I˜ Ũ = R − ωC Z =R+ (1.14) (1.15) Abbildung 1.19: Zeitdiagramm von Strom und Spannung bei der Serienschaltung von Widerstand und Kondensator i(t) = Iˆ sin(ωt) , ϕi = 0 u(t) = Û sin(ωt + ϕu ) , ϕu < 0 (1.16) 1.7. SERIEN– UND PARALLELERSATZSCHALTUNG 1.7.2 29 Induktive Phasenverschiebung Induktive Phasenverschiebung heißt, dass der Strom der Spannung nacheilt. Wegen I˜ = Y Ũ ist ϕY < 0, beziehungsweise wegen Ũ = Z I˜ ist ϕZ > 0. Parallelschaltung Abbildung 1.20: Schaltung und Zeigerdiagramme für Admittanz und Strom bzw. Spannung einer Parallelschaltung von Widerstand und Spule 1 1 + R jωL 1 j I˜ = Ũ − R ωL Y = (1.17) (1.18) Abbildung 1.21: Zeitdiagramm von Strom und Spannung bei der Parallelschaltung von Widerstand und Induktivität u(t) = Û sin(ωt) , ϕu = 0 i(t) = Iˆ sin(ωt + ϕi ) , ϕi < 0 (1.19) 30 KAPITEL 1. OSZILLOSKOP Serienschaltung Abbildung 1.22: Schaltung und Zeigerdiagramme für Impedanz und Strom bzw. Spannung einer Serienschaltung von Widerstand und Spule Z = R + jωL (1.20) Ũ = (R + jωL) I˜ (1.21) Abbildung 1.23: Zeitdiagramm von Strom und Spannung bei der Serienschaltung von Widerstand und Spule i(t) = Iˆ sin(ωt) , ϕi = 0 u(t) = Û sin(ωt + ϕu ) , ϕu > 0 (1.22) 31 1.7. SERIEN– UND PARALLELERSATZSCHALTUNG 1.7.3 Allgemeines Zu allen Zeigerdiagrammen lässt sich auch das duale Diagramm angeben. 1 ϕY = −ϕZ ⇒ Y = Y = Z1 Z (1.23) Für das folgende Beispiel wird eine Impedanz mit positivem ϕZ gewählt (induktive Phasenverschiebung). Abbildung 1.24: Zeigerdiagramme von Impedanz und Admittanz sowie von Strom und Spannung Ob man den Stromzeiger oder den Spannungszeiger in die reelle Achse legt, ist prinzipiell egal, fix ist nur die Phasenverschiebung zwischen Strom und Spannung ϕu − ϕi . ϕZ = (ϕu − ϕi ) > 0 ϕY = (ϕi − ϕu ) < 0 (1.24) Welche der beiden Möglichkeiten man wählt, hängt von der Schaltung ab, da entweder die Spannung für beide Elemente die selbe ist und die Ströme komplex addiert werden müssen (Parallelschaltung ⇒ Ũ in die reelle Achse legen) oder der Strom der selbe ist und die Spannungen verschieden sind (Serienschaltung ⇒ I˜ in die reelle Achse legen). ϕi = 0 ϕu > 0 ⇒ ϕZ = (ϕu − ϕi ) > 0 ϕY = (ϕi − ϕu ) < 0 = ˆ ϕu = 0 ϕi < 0 ⇒ 32 KAPITEL 1. OSZILLOSKOP 1.8 1.8.1 Übungsdurchführung Ausmessen einer symmetrischen Rechteckspannung Aufgabenstellung Messen Sie Amplitude U2pp (Upp ... Upeak to peak ), Periodendauer T , Anstiegszeit trise und Abfallzeit tf all des Signals des Funktionsgenerators bei der maximal möglichen Frequenz und der maximal möglichen Amplitude der Rechteckspannung. Messaufbau Verbinden Sie die Ausgänge des Funktionsgenerators (UA und M asse) mit dem Eingang CH1 des Oszilloskops. Stellen Sie am Generator fgrob auf ×2000, die Feineinstellung auf Maximum und den Wahlschalter für die Kurvenform auf symmetrisches Rechtecksignal. Stellen Sie am Oszilloskop den Eingangswahlschalter auf DC und wählen Sie geeignete Einstellungen für Empfindlichkeit und Zeitablenkung. Messung Messen Sie U2pp und T . Vergewissern Sie sich, dass die stufenlose Verstellung von Empfindlichkeit und Zeitbasis auf 1 bzw. CAL steht1 . Zur Messung von trise und tf all verwenden Sie die verzögerte Zeitbasis (DELAY) bzw. die ZOOM-Funktion 2 . Vergleichen Sie die automatische Messung mit Ihrer sorgfältigen Ablesung am Schirmbild. 1.8.2 Laden und Entladen eines Kondensators Wertangaben auf passiven Bauteilen Bei dreistelligen Aufdrucken entspricht die letzte Ziffer dem Zehnerexponenten, wobei die Grundeinheit für Kondensatoren 1 pF und für Induktivitäten 1 µH beträgt. Beispiele: 223“ auf einem keramischen Kondensator bedeutet: 22 · 103 pF = 22 nF. ” 332“ auf einer Induktivität bedeutet: 33 · 102 µH = 3,3 mH. ” Die Bauteilwerte sind auf Normreihen abgestimmt. Beispielsweise sind in der E12-Reihe i pro Dekade 12 Werte vorgesehen, nämlich 10 12 mit i = 0 ... 11. Dies ergibt (gerundet): 1 1,2 1,5 1,8 2,2 2,7 3,3 3,9 4,7 5,6 6,8 und 8,2 . Aufgabenstellung Nehmen Sie die Lade– und Entladekurve des 0,47 µF–Kondensators auf und berechnen Sie daraus den Kapazitätswert. Nehmen Sie eine Skizze der beiden Kurven in das Protokoll 1 Analoge Oszis haben zum Einstellen von Amplitude und Zeitbasis Stufenschalter mit einem kleineren aufgesetzten Drehregler. Mit diesem Drehregler kann eine stufenlose Feineinstellung erfolgen, die Skalierung auf dem Bildschirm stimmt aber nur in einer bestimmten Position dieses Reglers (die sog. CALibrated–Position). Bei digitalen Oszis gibt es diesen Regler nicht. 2 Sie können verzögerte Zeitbasis oder Zoom natürlich nicht nur hier, sondern auch bei allen weiteren Aufgaben verwenden, um besonders interessante Kurventeile vergrößert darzustellen. 33 1.8. ÜBUNGSDURCHFÜHRUNG auf. Messaufbau Zur Strommessung muss ein Shuntwiderstand Rshunt = 100 Ω laut Abbildung 1.25 vorgeUshunt sehen werden. Daraus folgt I = R . DUT“ bezeichnet das Messobjekt ( device under shunt ” ” test“). Als Spannungsversorgung wird das unsymmetrische Rechtecksignal des Funktionsgenerators bei 1 kHz verwendet. Wählen Sie die Amplitude so groß, dass am Messobjekt 5 V anliegen. Abbildung 1.25: Messaufbau zur Strom-/Spannungsmessung am Oszilloskop Da die Masseleitungen der beiden Oszilloskopeingänge intern miteinander verbunden sind, muss die Schaltung gemäß Abbildung 1.25 verwendet werden. Um die verkehrte Polarität des Spannungssignals am Shunt bei diesem Aufbau zu berücksichtigen, wird der zweite Kanal invertiert (CH2 INVERT). Der Aufbau nach Abbildung 1.25 funktioniert nur, da der Funktionsgenerator netzgetrennt und seine Masse daher nicht mit Erde verbunden ist. Andernfalls läge der Shuntwiderstand mit beiden Anschlüssen auf Erdpotenzial und die Strommessung wäre damit unmöglich. Messung Nehmen Sie den zeitlichen Verlauf von I und U auf und zeichnen Sie die Kurvenverläufe auf Millimeterpapier. Zur Berechnung von C wird die e–Potenz ausgewertet. Am Analogoszillsokop messen Sie die Zeitkonstante τ , indem Sie eine Flanke am Schirm dehnen, bis sie in das Raster des Oszilloskopschirmes passt. Nach der Zeit τ ist die e–Potenzkurve auf e−1 , das heißt auf das 1e –fache abgefallen bzw. auf 1− 1e (≈ 63 %) angestiegen. Es kann also τ an jenem Punkt abgelesen werden, an dem die Kurve die entsprechende Prozentmarke schneidet. Am Digitaloszillsokop nehmen Sie die Cursor zu Hilfe. Da der Beginn der Kurve meist verschliffen ist, muss für eine genaue Messung eine andere Vorgangsweise gewählt werden. U∞ sei die Endspannung nach Abklingen des Lade– bzw. Entladevorganges. Messen Sie für zwei Zeitpunkte t1 und t2 die zugehörigen Spannungswerte U (t1 ) und U (t2 ). Aus t U (t) − U∞ = ∆U0 e− τ (1.25) 34 KAPITEL 1. OSZILLOSKOP ergibt sich aus der Division der zwei Gleichungen für die zwei Messpunkte t1 −t2 U (t1 ) − U∞ = e− τ U (t2 ) − U∞ τ= ln t − t1 2 U (t1 )−U∞ U (t2 )−U∞ (1.26) (1.27) Messen Sie τ auch mit dieser Methode, wobei Sie für die zwei Messpunkte jene für ungefähr 1 und 32 des Gesamthubs verwenden. 3 Berechnen Sie aus τ und R die Kapazität C und vergleichen Sie diesen Wert mit dem Aufdruck und messen Sie den Kondensator mit dem mit dem Multimeter nach. Kommentieren Sie Abweichungen (welche Rolle spielt der Ausgangswiderstand der Signalquelle?). Hinweis: Verwenden Sie auch bei den folgenden Aufgaben einen Shuntwiderstand von 100 Ω zur Strommessung. 1.8.3 R, L und C im Wechselstromkreis Aufgabenstellung Messen Sie Strom, Spannung und Phasenwinkel und zeichnen Sie die maßstäblichen Zeigerdiagramme von Strom und Spannung für R, ZL und ZC für R = 680 Ω, L = 40 mH (im Übungsbrett integriert) und C = 1 µF bei einer Frequenz des Sinussignals von f = 1 kHz. Bestimmen Sie die Verlustfaktoren von Spule und Kondensator. Erstellen Sie aus den gemessenen Werten ein Zeigerdiagramm für die Impedanzen von R, L und C und ein Zeigerdiagramm für die Admittanzen von R, L und C unter Berücksichtigung der Verlustwinkel. Berechnen Sie die Blindwiderstände XL und XC aus den gemessenen Strömen und Spannungen und berechnen Sie daraus zur Kontrolle C und L. Messaufbau Für diese Messung wird dieselbe Schaltung wie für die Lade- und Entladevorgänge (Punkt 1.8.2) verwendet. Als DUT wird die zu messende Impedanz (R, L oder C) eingesetzt. Als Spannungsversorgung wird der Sinusausgang des Funktionsgenerators verwendet. Messung Für alle Messungen sei die Spannung am DUT konstant (Upp = 10 V). Wegen des Spannungsabfalles am Shunt muss bei jeder Messung nachjustiert werden. Für die Zeigerdiagramme von Strom und Spannung legen Sie den Stromzeiger in die reelle Achse. Der Verlustfaktor ist definiert durch Verlustfaktor = tan(δ) (1.28) wobei δ den Verlustwinkel bezeichnet. Ist ϕ der Phasenwinkel zwischen Strom und Spannung, so gilt δ = 90◦ − |ϕ| (1.29) 1.8. ÜBUNGSDURCHFÜHRUNG 1.8.4 35 RLC–Kombination Aufgabenstellung Messen Sie Strom, Spannung und Phasenwinkel der Parallelschaltung von R = 680 Ω, L = 40 mH und C = 1 µF bei einer Frequenz des Sinussignals von f = 1 kHz. Erstellen Sie aus den gemessenen Werten ein maßstäbliche Zeigerdiagramm für die Admittanz. Vergleichen Sie das Ergebniss mit den Ergebnissen aus Punkt 1.8.3, indem sie die in 1.8.3 einzeln gemessenen Werte für R,L,C graphisch addieren und zusätzlich in das Diagramm eintragen. Messaufbau Für diese Messung wird dieselbe Schaltung wie für die Lade– und Entladevorgänge (Punkt 1.8.2) verwendet. Als DUT wird die zu messende Impedanz (RkLkC) eingesetzt. (Der Shuntwiderstand sollte wieder auf 100 Ω erhöht werden.) Messung Führen Sie die Messung wie unter Punkt 1.8.3 durch und erstellen Sie das Zeigerdiagramm aus den gemessenen Werten. Kontrollieren Sie das Diagramm, indem Sie die Ergebnisse von Punkt 1.8.3 eintragen. 1.8.5 Schaltvorgang an einer RLC–Kombination Aufgabenstellung Nehmen Sie den zeitlichen Verlauf von Strom und Spannung nach einem Schaltvorgangs an einer RLC–Kombination auf. Als DUT wird eine LC–Kombination mit L = 40 mH und C = 0,22 µF verwendet, Rshunt wird durch einen 10 Ω Widerstand ersetzt. Stellen Sie am Funktionsgenerator ein symmetrisches Rechtecksignal mit einer Frequenz von etwa 100 Hz ein. Bestimmen Sie die Resonanzfrequenz und die Dämpfungskonstante der Eigenschwingung. Messaufbau Verwenden Sie für diese Messung eine Schaltung ähnlich der aus Punkt 1.8.2. Als DUT wird eine LC–Kombination mit L = 40 mH 3 und C = 0,22 µF eingesetzt, Rshunt wird durch einen 10 Ω Widerstand ersetzt. Messung Beobachten Sie die Verläufe der Kondensatorspannungen sowie des Stromes im DUT bei steigender Flanke des Rechteckssignals. Zeichnen Sie diese auf Millimeterpapier oder mitgebrachte Oszi–Schirm–Vordrucke. Bestimmen Sie aus den Kurven die Frequenz der auftretenden Schwingung und die Dämpfungskonstante. Hinweis: Verwenden Sie zum Bestimmen der Zeiten und Amplituden die Cursor–Funktion des Oszilloskops. 3 Manche Labor–Boards haben keine eingebaute Induktivität mit 40 mH. Verwenden Sie in diesem Fall eine steckbare Induktivität mit 60 mH. 36 KAPITEL 1. OSZILLOSKOP Überprüfen Sie rechnerisch anhand der Bauteilwerte ob die Dämpfung richtig gemessen wurde. Kommentieren und begründen Sie Abweichungen. 1.8.6 Ausmessen einer unbekannten Kombination Aufgabenstellung Messen Sie Strom, Spannung und Phasenwinkel einer unbekannten RL– oder RC–Kombination und finden Sie heraus, ob es sich bei der Kombination um eine Serien- oder eine Parallelschaltung handelt. Messaufbau und Messung Verwenden Sie denselben Aufbau und dieselben Messmethoden wie unter den Punkten 1.8.3 und 1.8.4 (Sinussignal!). Die unbekannte Kombination (Z x) wird Ihnen vom Praktikumsbetreuer gegeben. Bestimmen Sie aus dem Phasenwinkel, ob es sich um eine kapazitive oder induktive Schaltung handelt und bestimmen Sie die Werte der Elemente im entsprechenden Eratzschaltbild (RS, P und LS, P bzw. RS, P und CS, P der Serien- oder Parallelersatzschaltung) gemäß Punkt 1.7. Messung im xy–Betrieb Vermessen sie das Bauteil auch im xy–Modus des Oszilloskops und vergleichen sie die Ergebnisse. Passen sie ihren Messaufbau so an, dass auf der horizontalen Achse die Spannung und auf der vertikalen Achse der Strom dargestellt wird. Achten sie dabei auch auf die richtigen Vorzeichen! 1.8.7 Beobachten von nichtlinearem Verhalten Vom Praktikumsbetreuer erhalten sie ein unbekanntes Bauteil (NZ x). Untersuchen sie das Verhalten dieses Bauteils im xy–Betrieb bei Veränderung der Spannungsamplitude des Funktionsgenerators. Dokumentieren sie das Verhalten durch Anfertigung geeigneter Diagramme und beschreiben sie es in Stichworten (z.B. Strom steigt proportional/exponentiell mit Spannung...). Sie sollen nicht bestimmen um welches Bauteil es sich handelt sondern nur das Verhalten beschreiben. Überlegen sie, welchem Zweck dieses Bauteil in einer Schaltung dienen könnte. 1.9. FRAGEN 1.9 37 Fragen Die Fragen dienen der Vorbereitung auf das Praktikum und stellen nicht notwendigerweise Prüfungsfragen dar. Nicht alle Fragen können ausschließlich mit den Informationen aus dem Skriptum beantwortet werden. Recherchieren sie selbstständig und diskutieren sie mit Kollegen! • Sie wollen mit dem Oszi den Wechselstrom des Stromnetzes überprüfen. Was müssen sie dabei beachten? • Zeichnen sie das Zeigerdiagramm der Admittanz einer Parallel– sowie Serienschaltung von C = 100 nF und R = 1 kΩ bei f = 1kHz. • Skizzieren sie das Schirmbild eines Oszis im xy–Betrieb beim Vermessen eines reellen Widerstandes. (Schaltung lt. Abb. 1.25.) • Skizzieren sie die Lissajous–Figur für folgende Signale: CH1 = sin(ωt) CH2 = cos(2ωt + π4 ) • Sie vermessen mit dem Oszi die Betriebsspannung einer Schaltung (5 Volt DC). Das Oszi zeigt einen Mittelwert von nur 2 mV an, die Schaltung funktioniert aber und die Messleitung ist korrekt angeschlossen. Worauf deutet das hin? • Wozu dienen die 10% und 90% Marken im Raster des Schirmes eines analogen Oszilloskops? • Ein Zweipol nimmt bei Anlegen einer Wechselspannung einen Strom mit einer Phasenlage ϕu − ϕi = −30◦ auf. Verhält sich der Zweipol induktiv oder kapazitiv? Wird der Phasenwinkel größer oder kleiner werden, wenn man die Frequenz der Spannung erhöht? • Was wird mit dem ”‘Triggerpegel”’ eingestellt? • Welche Rolle spielt der Triggerpegel im xy–Betrieb? 38 KAPITEL 1. OSZILLOSKOP INSTITUT FÜR MIKROELEKTRONIK UND MIKROSENSORIK JOHANNES KEPLER UNIVERSITÄT LINZ Praktikum Elektrotechnik WS 2017 Protokoll Übung 1: Oszilloskop Übungsdatum Abgabedatum Name Name Matr.Nr. Matr.Nr. Unterschrift Unterschrift 41 Kapitel 2 Netzwerke und Drehstrom 2.1 2.1.1 Ersatzspannungsquelle Theorie Ein Satz der Netzwerktheorie, dessen Ableitung und Beweis den Rahmen dieses Skriptums sprengen würde, besagt, dass jedes lineare Netzwerk in seiner Eigenschaft, bezogen auf zwei Anschlüsse (Klemmen), durch eine Ersatzschaltung dargestellt werden kann, die - entweder aus einer idealen Spannungsquelle mit einem Serienwiderstand - oder aus einer idealen Stromquelle mit einem Parallelwiderstand besteht (ideale Spannungsquellen liefern Spannung unabhängig vom Laststrom, ideale Stromquellen liefern Strom unabhängig von der Lastspannung). Linear bedeutet hier, dass das Netzwerk aus idealen R, L, C, Spannungs- und Stromquellen besteht und insbesondere, dass R, L und C konstant sind und nicht spannungs- oder stromabhängig. Ri Ia Ia Ik Ul Ua = Ri Ua Abbildung 2.1: Äquivalenz des Klemmenverhaltens von Ersatzspannungsquelle (Leerlaufspannung Ul ) und Ersatzstromquelle (Kurzschlussstrom Ik ). Häufig interessiert an einem komplizierten Netzwerk nur dessen elektrisches Verhalten (Zusammenhang zwischen Strom und Spannung) in einem Zweig bzw. zwischen zwei Klemmen. Der Satz von der Ersatzspannungs- bzw. Stromquelle besagt nun, dass sich jedes lineare Netzwerk, auch wenn es noch so kompliziert ist, auf ein Ersatzschaltbild (ESB) entsprechend Abbildung 2.1 zurückführen lässt. Dieses gilt dann natürlich nur bezüglich dieser beiden Klemmen, für jedes andere Klemmenpaar kann aber genauso ein ESB gefunden werden. Selbstverstädlich gilt dies auch für Netzwerke mit Kapazitäten und 42 KAPITEL 2. NETZWERKE UND DREHSTROM Induktivitäten, so lange diese in ihren linearen Bereichen betrieben werden (Stichwort Sättigung). Wie aus dem Ersatzschaltbild ersichtlich ist, ändert sich die Klemmenspannung Ua linear mit dem Laststrom Ia (Ua = Ul − Ia Ri , Ri ist der Innenwiderstand der Ersatzspannungsquelle). Enthält das Netzwerk jedoch auch nichtlineare Elemente, so gilt der Satz von der Ersatzspannungsquelle nicht mehr. Hier bietet sich aber die Möglichkeit ein lineares Kleinsignal–ESB für einen bestimmten Arbeitspunkt, in dem die nichtlinearen Bauelemente betrieben werden, zu bestimmen. Alle nichtlinearen Kennlinien werden dann in der Umgebung des Arbeitspunktes linear approximiert. Voraussetzung für die Gültigkeit eines solchen Kleinsignal–ESB ist natürlich, dass sich Ströme und Spannungen gegenüber dem Arbeitspunkt nur geringfügig ändern. Die Spannung der Ersatzspannungsquelle ist gleich der Leerlaufspannung (Ia = 0) der beiden Netzwerkklemmen, der Strom der Ersatzstromquelle ist gleich dem Kurzschlussstrom (Ua = 0) der Netzwerkklemmen. Der Kurzschlussstrom kann nur in den seltensten Fällen direkt gemessen werden (z. B. sind die Sicherungen und Zuleitungen einer normalen Netzsteckdose nicht geeignet, den Kurzschlussstrom zu führen!). Kurzschlussstrom und Leerlaufspannung hängen wie folgt zusammen Ul = Ik Ri . (2.1) Ist das Netzwerk bekannt, so kann der Widerstand Ri einfach bestimmt werden: Jede Spannungsquelle wird durch einen Kurzschluss und jede Stromquelle durch einen Leerlauf ersetzt. Durch Zusammenfassung der so erhaltenen Schaltung zwischen den Klemmen ergibt sich Ri . Diese Vorgangsweise soll an folgendem Beispiel gezeigt werden. R1 Ia Ri Ia Uq R2 Ua = Ul Ua Abbildung 2.2: Ersatzspannungsquelle für einen Spannungsteiler Die Quellenspannung der Ersatzquelle ergibt sich zu Ul = Uq R2 . R1 + R2 (2.2) Zur Bestimmung des Widerstandes wird die Spannungsquelle im Netzwerk durch einen Kurzschluss ersetzt. Dann erscheint an den Klemmen die Parallelschaltung von R1 und R2 . Daher ist der Widerstand R1 R2 . (2.3) Ri = R1 + R2 43 2.1. ERSATZSPANNUNGSQUELLE Ist das Netzwerk nicht bekannt und kann der Kurzschlussstrom nicht gemessen werden, so muss aus der linearen Abhängigkeit der Ausgangsspannung Ua vom Laststrom Ia auf den Widerstand Ri und in weiterer Folge auf Ik rückgerechnet werden. Man misst also die Klemmenspannung bei einem bekannten Laststrom Ia und erhält mit der zuvor gemessenen Leerlaufspannung aus der Gleichung Ua = Ul − Ia Ri den Innenwiderstand Ri . Es empfiehlt sich, diese Messung bei verschiedenen Lastströmen zu wiederholen, um zu kontrollieren, ob sich das Netzwerk wirklich linear verhält. Das Superpositionsprinzip (Satz von Helmholtz) Enthält ein Netzwerk mehrere Strom- und/oder Spannungsquellen, dann kann der Strom bzw. die Spannung in einem Zweig des Netzwerks durch Superposition der Wirkungen der einzelnen Quellen bestimmt werden. Die Vorgangsweise ist wie folgt: Alle bis auf eine Quelle im Netzwerk werden entfernt (d. h. Spannungsquellen werden durch Kurzschlüsse und Stromquellen durch Leerläufe ersetzt). Nun wird im interessanten Zweig der Strom oder die Spannung zufolge der übriggebliebenen Quelle bestimmt. Dieser Vorgang wird für alle anderen Quellen im Netzwerk wiederholt. Am Schluss werden die Teilströme bzw. -spannungen im Zweig aufaddiert. Die so gewonnenen Größen entsprechen jenem Zweigstrom oder jener Zweigspannung, die zu beobachten sind, wenn alle Quellen im Netzwerk in Betrieb sind. Voraussetzung für die Anwendung des Superpositionsprinzips ist die Linearität des Netzwerkes. 2.1.2 Spannungs– und stromrichtiges Messen Für die oben erwähnte messtechnische Bestimmung von Ri müssen Strom und Spannung am Lastwiderstand gleichzeitig bestimmt werden. Dazu sind grundsätzlich zwei Schaltungsvarianten möglich (siehe Bild 2.3). Uerr A IR V R UR a) A Ierr V IR R UR b) Abbildung 2.3: a) Stromrichtiges und b) spannungsrichtiges Messen Beim stromrichtigen Messen ist der gemessene Strom identisch (abgesehen vom Messfehler des Instrumentes) mit jenem durch den Widerstand. Die Spannung am Voltmeter ist um den Betrag des Spannungsabfalls am Innenwiderstand des Amperemeters größer als jene am Widerstand. Wird spannungsrichtig gemessen, so sind die Spannungen am Voltmeter und am Widerstand gleich, das Amperemeter misst aber die Summe der Ströme durch den Widerstand und durch das Voltmeter. Je nach Größe des Widerstandes liefern die beiden Methoden unterschiedlich genaue Ergebnisse. Ist der Widerstand groß, so hat der 44 KAPITEL 2. NETZWERKE UND DREHSTROM zusätzliche kleine Innenwiderstand des Amperemeters bei der stromrichtigen Methode nur wenig Einfluss. Wird aber spannungsrichtig gemessen, kann der hohe Innenwiderstand des Voltmeters parallel zum ebenfalls hohen Lastwiderstand den gemessenen Strom deutlich verfälschen. Bei kleinen Lastwiderständen sind die Verhältnisse genau umgekehrt. Für besonders genaue Messungen können durch die Berücksichtigung der Innenwiderstände der Messgeräte die Messwerte noch korrigiert werden. 2.2 Leistungsanpassung Abbildung 2.4: Leistungsanpassung bei einem Generator mit Innenwiderstand Ri Während von Spannungsquellen üblicherweise ein sehr geringer (idealerweise verschwindender) und von Stromquellen ein sehr großer (idealerweise unendlicher) Innenwiderstand erwartet wird, gibt es auch Situationen, in denen das Auftreten eines nicht vernachlässigbaren Generatorwiderstandes unvermeidbar oder sogar erwünscht ist. Ein typisches Beispiel dafür ist die Hochfrequenztechnik, in der zumeist mit Innenwiderständen von 50 Ω gearbeitet wird. In diesem Fall ist es von großem Interesse herauszufinden, wie sich der Innenwiderstand des Generators und eine daran angeschlossene Last zueinander verhalten müssen, um dem Generator die maximal mögliche Leistung zu entnehmen. Abbildung 2.4 zeigt die eben beschriebene Situation eines Generators mit Leerlaufspannung U0 und Innenwiderstand Ri , an den eine Last RL angeschlossen wird. Aus der Spannungsteilerregel ergibt sich die Spannung an der Last zu UL = RL U0 Ri + RL (2.4) und aus einem einfachen Maschenumlauf der Laststrom zu IL = U0 . Ri + RL (2.5) Die an die Last abgegebene Leistung errechnet sich dann zu PL = UL IL = U02 RL . (Ri + RL )2 (2.6) Durch Differenzieren von Gleichung 2.6 nach RL und Nullsetzen folgt die Bedingung für maximale Leistung zu (2.7) RL = Ri . 2.3. SPANNUNGSTEILER 45 Hinweis: Versuchen Sie zur Vorbereitung auf das Praktikum diese Ableitung vollständig durchzuführen! Besonders soll noch darauf hingewiesen werden, dass für die reflexionsfreie Anpassung von Leitungen an Generatoren und Empfänger das gleiche Ergebnis gefunden wird. Dies ist wiederum in der Hochfrequenztechnik von außerordentlicher Wichtigkeit, da es bedeutet, dass durch eine Leitung, die reflexionsfrei an Generator und Last angepasst ist, gleichzeitig die maximal mögliche Leistung übertragen wird. Anmerkung: In der Energietechnik ist man nicht an der Maximierung der übertragbaren Leistung interessiert, sondern an der Minimierung der auftretenden Verluste. Bei Leistungsanpassung verliert man 50% der erzeugten Energie durch die Übertragung, dies wäre für das Stromnetz (und den Strompreis) fatal! 2.3 2.3.1 Spannungsteiler Unbelasteter und belasteter Spannungsteiler Für diesen Übungsteil ist das Wissen um Serien- und Parallelschaltung von Widerständen, wie es in den Übungen zur Vorlesung ausführlichst behandelt wurde, ausreichend. 2.4 2.4.1 Frequenzunabhängiger Spannungsteiler Theorie Für die Messung bei höheren Frequenzen werden häufig frequenzkompensierte Spannungsteiler (z. B. Eingangsabschwächer oder Oszilloskoptastköpfe) verwendet. Diese bestehen aus der Parallelschaltung eines Widerstands- und eines Kapazitätsspannungsteilers (Bild R1 2 2.5) Wenn beide genau dasselbe Spannungsteilerverhältnis haben, so gilt R = C und C1 2 Abbildung 2.5: Frequenzkompensierter Spannungsteiler das Übertragungsmaß ist theoretisch vollkommen frequenzunabhängig (zur Vertiefung des Verständnisses wird empfohlen, den Spannungsteiler ausführlich nachzurechnen). Das ist gleichbedeutend damit, dass der obere und der untere Teil des Spannungsteilers die gleiche Zeitkonstante haben (τ1 = R1 C1 = τ2 = R2 C2 ). Die bei sehr hohen Frequenzen trotzdem auftretenden Abweichungen sind durch die inneren Frequenzabhängigkeiten der Bauteile und durch vorhandene parasitäre Induktivitäten gegeben. Am besten lässt sich die korrekte Frequenzkompensation mit einem rechteckförmigen Signal überprüfen, da dieses auch sehr hohe Frequenzen enthält. Einen entsprechenden Kurvenverlauf zeigt Bild 2.6. 46 KAPITEL 2. NETZWERKE UND DREHSTROM Abbildung 2.6: Ausgangsspannung für über-, unter- und richtig kompensierten Spannungsteiler Da im Messbetrieb der Spannungsteilerabgriff belastet wird (mit einem Kabel und einem Verstärkereingang), muss dieser Lastwiderstand (R und C) berücksichtigt werden. Daher ist bei Oszilloskoptastköpfen einer der beiden Parallelkondensatoren einstellbar ausgeführt um den Spannungsteiler an das Kabel und den Verstärkereingang anzupassen. Der wichtigste Verwendungszweck von Tastköpfen, die einen Vorschaltspannungsteiler (meist 1/10) darstellen, ist es, die kapazitive Belastung des Messobjektes zu verkleinern. Abbildung 2.7: Gesamtschaltung Oszilloskoptastkopf mit Kabel und Oszilloskop Die Eingangskapazität Ce ergibt sich dabei aus der Serienschaltung der Kompensationskapazität C1 mit C2 des Spannungsteilers samt der parallelliegenden Kabel- und Eingangskapazität des Oszilloskops. 1 1 1 = + Ce C1 C2 + CK + CeOsz (2.8) Die kapazitive Belastung wird also annähernd um das Spannungsteilerverhältnis kleiner als die Eingangskapazität des Oszilloskops mit dem Kabel ohne Tastkopf. Vor der Messung mit Tastköpfen ist immer darauf zu achten, dass sie richtig kompensiert sind. Dazu stellen die meisten Oszilloskope eine Rechteckspannung zur Verfügung. 47 2.5. WECHSELSTROM 2.5 2.5.1 Wechselstrom Wechselstromkenngrößen Für die Messung eines Signals nach Abbildung 2.8 werden verschiedene Kenngrößen definiert. Als Beispiel wird ein Stromsignal i(t) gewählt. Die Periodendauer wird mit τ = f1 bezeichnet. Der Maximalwert des Stromes ist imax , der Minimalwert imin . Abbildung 2.8: Zeitdiagramm eines allgemeinen periodischen Signals Gleichwert Den arithmetischen Mittelwert ī bezeichnet man als Gleichwert. Er wird durch Integration über eine Periode berechnet. Zτ 1 ī = τ 0 1 i(t)dt = τ tZ 0 +τ i(t)dt (2.9) t0 Gleichrichtwert Wird das Signal vor der Mittelwertberechnung gleichgerichtet, so erhält man den Gleichrichtwert |i|. tZ 0 +τ Zτ 1 1 |i(t)|dt (2.10) |i(t)|dt = |i| = τ τ 0 t0 Bemerkung: Allgemein gilt |i| 6= | ī |. Effektivwert Die wichtigste Kenngröße für Wechselstrom ist der Effektivwert Ief f . Würde ein Gleichstrom der Höhe I = Ief f durch einen Widerstand fließen, so wäre die in Wärme umgesetzte Leistung die gleiche wie für den Wechselstrom i(t). v v u tZ0 +τ u Zτ u u u1 u1 [i(t)]2 dt (2.11) [i(t)]2 dt = t Ief f = t τ τ 0 t0 48 KAPITEL 2. NETZWERKE UND DREHSTROM Im Folgenden wird bei Effektivwerten der Index eff“ weggelassen. ” Spitze-Spitze, Brumm Der Gesamthub des Signales zwischen maximalem und minimalem Wert heißt ipp oder iss (peak to peak ... Spitze-Spitze). Bei Gleichströmen und Gleichspannungen, welchen nur ein kleines Wechselsignal überlagert ist, spricht man von Brumm. ipp = imax − imin (2.12) Sinusförmige Wechselgröße Abbildung 2.9: Zeitdiagramm eines Sinussignales Handelt es sich um ein rein sinusförmiges Signal i(t) = Iˆ sin(ωt + ϕ) mit der Amplitude (dem Scheitelwert) Iˆ nach Abbildung 2.9, so gelten folgende Beziehungen: ī = 0 (2.13) 1 I = Iˆ √ 2 2 |i| = Iˆ π ipp = 2 Iˆ 2.6 (2.14) (2.15) (2.16) Leistungsmessung bei Sinusgrößen Wird an einen Verbraucher eine sinusförmige Wechselspannung gelegt, so fließt durch ihn ein ebenfalls sinusförmiger Wechselstrom. Ist der Verbraucher nicht rein ohmsch, ergibt sich eine Phasenverschiebung ϕ = ϕu − ϕi zwischen Strom und Spannung. Bei induktiver Last ist ϕ positiv, bei kapazitiver Last negativ. Abbildung 2.10 zeigt die Zeitdiagramme von Spannung und Strom. Multipliziert man die Effektivwerte von Strom I und Spannung U ohne Berücksichtigung der Phasenverschiebung, so erhält man die Scheinleistung S (PS ). Der ohmsche Anteil der Leistung heißt Wirkleistung P (PW ), der Blindanteil Blindleistung Q (PB ). S =UI, P = U I cos(ϕ) , Q = U I sin(ϕ) , [S] = 1 VA [P ] = 1 W [Q] = 1 var . (2.17) (2.18) (2.19) 2.7. DREIPHASENWECHSELSTROM 49 Abbildung 2.10: Spannung und Strom einer Impedanz Abbildung 2.11: Zusammenhang zwischen Schein-, Wirk- und Blindleistung Diese Beziehungen können durch ein Dreieck laut Abbildung 2.11 dargestellt werden. Der Zusammenhang zwischen S, P und Q ergibt sich daraus zu p (2.20) S = P 2 + Q2 . 2.7 2.7.1 Dreiphasenwechselstrom Einführung Drehstromsysteme entstehen durch Zusammenschalten mehrerer phasenverschobener Spannungen. Das gebräuchlichste Drehstromsystem, das in der Regel auch im öffentlichen Stromversorgungsnetz eingesetzt wird, liefert drei sinusförmige Wechselspannungen, die miteinander verkettet und um 120◦ gegeneinander phasenverschoben sind. In der Abbildung 2.12 sind die drei Spannungen als Zeitdiagramm u(t) und in der Abbildung 2.13 als Zeigerdiagramm dargestellt. Bei den Spulen des Drehstromgenerators und auf der Verbraucherseite beim Anschluss von z. B. Motoren sind grundsätzlich zwei Schaltungsarten üblich, nämlich die Sternschaltung und die Dreieckschaltung. In der Abbildung 2.14 sind diese zwei Möglichkeiten dargestellt. Die Leiter werden folgendermaßen bezeichnet: L1, L2, L3 Phasen, Leiter N Neutralleiter UL1,L2 , UL2,L3 , UL3,L1 verkettete Spannungen, Außenleiterspannungen, Dreieckspannungen UL1,N , UL2,N , UL3,N Phasenspannungen, Sternspannungen, 50 KAPITEL 2. NETZWERKE UND DREHSTROM Abbildung 2.12: Zeitdiagramm der drei Spannungen eines Drehstromsystems Abbildung 2.13: Zeigerdiagramm der drei Spannungen eines Drehstromsystems wobei statt UL1,N , UL2,N und UL3,N auch U1 , U2 und U3 geschrieben wird. Als Strangspannung wird jeweils die Spannung an den Anschlüssen eines Stranges bezeichnet. Je nach Schaltung kann die Strangspannung daher gleich der Außenleiterspannung oder der Phasenspannung sein. 2.7.2 Spannungen und Phasenlage Die von einem Drehstromgenerator erzeugten drei sinusförmigen und um 120◦ phasenverschobenen Wechselspannungen sind so miteinander verkettet, dass drei Strangspannungen und drei verkettete Spannungen abgegriffen werden können. Das Spannungszeigerdiagramm (Abbildung 2.15) zeigt die Zusammenhänge zwischen den Spannungen in Bezug auf Größe und Phasenlage. Der Zusammenhang zwischen Phasenspannung ULN und verketteter Spannung ULL lässt sich leicht aus dem Zeigerdiagramm ablesen ULL = ULN sin (60◦ ) 2 ⇒ ULL = √ 3 ULN . (2.21) Üblicherweise werden die Spannungen in Effektivwerten angegeben. Im öffentlichen Versorgungsnetz gilt daher ULN = 230 V und ULL = 400 V (früher 220 V / 380 V). 2.7. DREIPHASENWECHSELSTROM 51 Abbildung 2.14: Sternschaltung und Dreieckschaltung. Abbildung 2.15: Komplettes Zeigerdiagramm der Spannungen in einem Drehstromnetz 2.7.3 Leistungsmessung in Dreileitersystemen - Aronschaltung Für die Bestimmung der Gesamtleistung in einem Drehstromdreileitersystem ist die Messung von 2 Spannungen und 2 Strömen ausreichend. Das lässt sich für die Sternschaltung (vgl. Abbildung 2.14) wie folgt sehen: Die gesamte komplexe Leistung im System ist (2.22) S = U L1, N I ∗1 + U L2, N I ∗2 + U L3, N I ∗3 ¯ ¯ ¯ ¯ ¯ ¯ ¯ wobei I X der Strom in der Phase LX ist und ∗ “ die komplexe Konjugation bezeichnet. ” ¯ Da im Dreileitersystem kein Neutralleiter vorhanden ist, muss die Beziehung I 1 + I 2 + I 3 = 0 ⇒ I ∗1 + I ∗2 + I ∗3 = 0 (2.23) ¯ ¯ ¯ ¯ ¯ ¯ gelten. Wird I3 aus dieser Gleichung ausgedrückt und in die Leistungsgleichung eingesetzt, so erhalten wir (2.24) S = I ∗1 U L1, N − U L3, N + I ∗2 U L2, N − U L3, N = I ∗1 U L1, L3 + I ∗2 U L2, L3 . ¯ ¯ ¯ ¯ ¯ ¯ ¯ ¯ ¯ ¯ ¯ 52 KAPITEL 2. NETZWERKE UND DREHSTROM A L1 V I1 L1 UL3, N UL1, L3 UL1, N A V V UL2, L3 V I2 L2 A I3, 1 I3 L3 UL2, N I1, 2 UL1, L3 I3 L3 L2 I1 UL2, L3 A I2, 3 I2 Abbildung 2.16: Aronschaltung Durch Messung von 2 Strangströmen und 2 verketteten Spannungen entsprechend Abbildung 2.16 ist es also möglich, auf die Gesamtleistung im dreiphasigen Verbraucher zu schließen. Da Ströme und Spannungen multipliziert werden, welche nicht an einem Strang (Zweipol) auftreten, ist die Phasenverschiebung nicht gleich dem Phasenwinkel der Strangimpedanz. So ist beispielsweise bei Verwendung dreier gleicher, rein ohmscher Lastwiderstände die Phasenverschiebung zwischen I1 und UL1, L2 30◦ . Eine ähnliche Ableitung ist im Fall der Dreieckschaltung des Verbrauchers möglich. Hier gilt (2.25) S = U L1, L2 I ∗1, 2 + U L2, L3 I ∗2, 3 + U L3, L1 I ∗3, 1 , ¯ ¯ ¯ ¯ ¯ ¯ ¯ wobei I X, Y der Strom in jenem Strang ist, der die Phase LX mit der Phase LY verbindet. ¯ Mit den Gleichungen I 2, 3 = I 1, 2 + I 2 ¯ ¯ ¯ ⇒ I ∗2, 3 = I ∗1, 2 + I ∗2 ¯ ¯ ¯ (2.26) I 3, 1 = I 1, 2 − I 1 ¯ ¯ ¯ ⇒ I ∗3, 1 = I ∗1, 2 − I ∗1 ¯ ¯ ¯ (2.27) sowie erhalten wir (2.28) S = U L2, L3 I ∗2 − U L3, L1 I ∗1 + I ∗1, 2 U L1, L2 + U L2, L3 + U L3, L1 . ¯ ¯ ¯ ¯ ¯ ¯ ¯ ¯ ¯ Da U L1, L2 + U L2, L3 + U L3, L1 = 0 und U L1, L3 = −Ū L3, L1 gilt, ergibt sich wieder ¯ ¯ ¯ ¯ S = I ∗1 U L1, L3 + I ∗2 U L2, L3 . ¯ ¯ ¯ ¯ ¯ (2.29) Die im Drehstromsystem insgesamt umgesetzte Wirkleistung entspricht dann dem Realteil der komplexen Gesamtleistung S während die Blindleistung durch den Imaginärteil ¯ von S gegeben wird. ¯ In der Praxis dient die Aronschaltung der Bestimmung der Wirkleistung mit einem Wattmeter. Dabei misst man hintereinander die Wirkleistungen, die sich durch Verknüpfung der Spannungen und Ströme, wie soeben beschrieben, ergeben. Die Gesamtleistung ist dann die Summe der Ergebnisse beider Messungen. Durch die im Drehstromsystem vorhandenen Phasenverschiebungen können bei den Einzelmessungen auch negative Werte auftreten. Diese Methode liefert auch bei unsymmetrischer Last ein korrektes Ergebnis. 2.8. ÜBUNGSDURCHFÜHRUNG 2.8 2.8.1 53 Übungsdurchführung Leistungsanpassung Messen Sie die von einer Gleichspannungsquelle (U0 = 15 V, Ri = 1 kΩ; Ri muss der idealen Spannungsquelle extern beigefügt werden!) an einen Lastwiderstand RL abgegebene Leistung und bestätigen Sie so die Theorie der Leistungsanpassung. Der Innenwiderstand nach dieser Angabe muss extern vorgesehen werden, da die elektronisch stabilisierte Spannungsquelle einen verschwindend kleinen Innenwiderstand aufweist. Überlegen Sie sich die passende Schaltung sowie geeignete Lastwiderstände für eine Kennlinie P = f(RL ) mit mindestens 10 Messpunkten inklusive RL = 0. Überlegen Sie sich vor Beginn der Übung (zu Hause) sinnvolle Werte für die Lastwiderstände bzw. deren Kombinationen. Welche Messmethode ist für diese Messung besser, strom- oder spannungsrichtige Messung? Zeichnen Sie U = f(RL ), I = f(RL ) und P = f(RL ) in ein Diagramm. Ziehen sie eine logarithmische X–Achse in Betracht (was ist dann mit RL = 0?)! 2.8.2 Spannungsteiler Vom Übungsleiter erfahren Sie zwei Parameter (R1 , R2 , Rges , Ra , UUae ) eines Spannungsteilers, den sie dimensionieren sollen. Berechnen Sie die unbekannten Parameter und finden Sie die entsprechende Kombination aus den vorhandenen Widerständen, um diesen Spannungsteiler zu realisieren. Verlassen Sie sich aber nicht auf die aufgedruckten Werte, da die Widerstände einen Toleranzbereich von 5% aufweisen, messen Sie die korrekten Werte zuerst mit dem Ohmmeter. Kontrollieren Sie den so bestimmten Spannungsteiler durch die Messung von Ue und Ua . Belasten Sie den Spannungsteiler nun mit folgenden Lastwiderständen: 15 kΩ, 10 kΩ, 5 kΩ, 1 kΩ, 0,5 kΩ. Zeichnen Sie im Protokoll Ua als Funktion von RL und vergleichen Sie drei gemessene Werte mit den zugehörigen gerechneten. 2.8.3 Frequenzkompensierter Spannungsteiler Entwerfen Sie mit den vorhandenen Kondensatoren und Widerständen einen frequenzkompensierten Spannungsteiler nach Abbildung 2.5 mit einem Teilerverhältnis von annähernd Ue /Ua = 3/1. Verwenden Sie als R1 einen Widerstand von 1 kΩ und, um den Spannungsteiler auch abgleichen zu können, das Potentiometer als R2 . ACHTUNG, bei Verwendung eines kleineren Wertes als 1 kΩ für R1 kann wegen der auftretenden hohen Querströme das Potentiometer zerstört werden. Gleichen Sie den Spannungsteiler mit einer Rechteckspannung (f = 1 kHz) ab und messen Sie dann das tatsächliche Spannungsteilerverhältnis. Nehmen Sie je eine Skizze des Schirmbildes für die drei verschiedenen Kompensationsfälle in das Protokoll auf. Beobachten Sie das Verhalten des frequenzkompensierten Spannungsteilers auch bei sehr tiefen und sehr hohen Frequenzen der Rechteckspannung. Was fällt Ihnen auf und wie können Sie eventuell störende Phänomene bekämpfen (Kommentare ins Protokoll!). 54 2.8.4 KAPITEL 2. NETZWERKE UND DREHSTROM Effektivwertmessung Messen Sie die Amplitude Û und den Effektivwert U einer Sinusspannung und einer symmetrischen Rechteckspannung bei ca. 50 Hz. Verwenden Sie als Signalquelle den Funktionsgenerator bei der maximalen Amplitude. Messen Sie mit dem Oszilloskop und mit dem Digitalmultimeter und berechnen Sie aus beiden Messungen den Effektivwert. (Falls nötig auf AC schalten!) Achtung: Es gibt zwei verschiedene Typen von Messgeräten. Die billigeren (AVG ... average, z. B. Metex MX40) haben keine Möglichkeit der echten Effektivwertmessung, sondern zeigen gemäß Gleichung (2.30) nur den Gleichrichtwert umskaliert auf den Effektivwert einer Sinusgröße an. π 1 √ uAnzeige = |u| · (2.30) 2 2 Um den Effektivwert der Rechteckspannung mit diesem Multimeter messen zu können, muss zuerst |u| aus Gleichung (2.30) berechnet werden. Überlegen Sie sich den Zusammenhang zwischen |u| und U und berechnen Sie so U . Vergleichen Sie den aus Û berechneten mit dem aus uAnzeige berechneten Effektivwert. Bessere Ausführungen von Messgeräten (True RMS ... root mean square, z. B. Metex MX47, Fluke 175) quadrieren vor der Mittelung die Messgröße und können so auch bei nicht sinusförmigen Signalen den korrekten Effektivwert anzeigen. Voraussetzung dafür ist, dass der Crest-Faktor Û /Ueff des Signales nicht zu groß ist. Der zulässige Crest-Faktor hängt vom konkret verwendeten Messgerät ab. Messen Sie mit beiden Messgeräten und vergleichen Sie berechneten und abgelesenen Effektivwert. 2.8.5 Sternschaltung Symmetrische Belastung mit Neutralleiter: Beschalten Sie den am Übungsbrett vorhandenen Drehstromgenerator mit drei Widerständen R à 1 kΩ in Vierleiter-Sternschaltung laut Abbildung 2.17. Messen Sie die Strangströme IL1 , IL2 und IL3 , sowie den Abbildung 2.17: Messaufbau für Sternschaltung Nullleiterstrom IN mit den Digitalmultimetern. Berechnen Sie die gesamte umgesetzte Leistung PStern . 2.8. ÜBUNGSDURCHFÜHRUNG 55 Symmetrische Belastung ohne Neutralleiter: Entfernen Sie den Neutralleiter und bestimmen Sie erneut die umgesetzte Leistung im Stern mit Hilfe der Aronschaltung. Wie bereits in Abschnitt 2.7.3 ausgeführt worden ist, sind dabei die Außenleiterspannung UL1, L3 und der Leiterstrom I1 nicht in Phase, was genauso für UL2, L3 und I2 gilt. Bei der Berechnung der Leistung nach Gleichung (2.18) muss diese Phasenverschiebung daher berücksichtigt werden und es gilt cos(ϕ) 6= 1. Würden Strom und Spannung nicht getrennt voneinander gemessen werden, sondern statt dessen, wie in der Praxis üblich, ein richtiges Wattmeter eingesetzt, wäre diese Korrektur nicht nötig, da dann die Phasenverschiebung vom Messgerät selbst berücksichtigt wird. Unsymmetrische Belastung: Wiederholen Sie die beiden Messungen mit drei verschiedenen Widerstandswerten für R1 , R2 und R3 nach Angabe des Übungsleiters und zeichnen Sie die ZeigerdiagrammePfür Ströme und Spannungen. Kontrollieren Sie für die Sternschaltung mit Neutralleiter IL,i = IN und messen Sie bei der Sternschaltung ohne Neutralleiter die Sternpunktverschiebung (Spannung US, N zwischen dem Sternpunkt S und dem Neutralleiter N). Berechnen Sie die gesamte umgesetzte Leistung PStern . Da mit den vorhandenen Messgeräten die Phasenbeziehungen zwischen Strömen und Spannungen nicht einfach gemessen werden können, kann die Aronschaltung hier nicht angewandt werden. 2.8.6 Dreieckschaltung Symmetrische Belastung: Beschalten Sie den am Übungsbrett vorhandenen Drehstromgenerator mit drei Widerständen R à 1 kΩ in Dreieckschaltung laut Abbildung 2.18. Messen Sie die Leiterströme IL1 , IL2 und IL3 , sowie die Strangströme IR1 , IR2 und IR3 Abbildung 2.18: Messaufbau für Dreieckschaltung mit den Digitalmultimetern. Berechnen Sie die gesamte umgesetzte Leistung PDreieck und vergleichen Sie diese mit PStern . Bestimmen Sie die umgesetzte Leistung auch mit der Aronschaltung. Unsymmetrische Belastung: Wiederholen Sie die Messung mit drei verschiedenen Widerstandswerten für R1 , R2 und R3 nach Angabe des Übungsleiters und zeichnen Sie P das Zeigerdiagramm aller sechs Ströme. Kontrollieren Sie IL,i = 0. Überlegen Sie sich, für welche Ströme (IL,i oder IR,i ) die Phasenbeziehung von 120◦ gelten muss. Berechnen Sie 56 KAPITEL 2. NETZWERKE UND DREHSTROM die gesamte umgesetzte Leistung PDreieck . Die Aronschaltung ist hier aus den genannten Gründen ebenfalls nicht anwendbar. 2.9 Fragen Die Fragen dienen der Vorbereitung auf das Praktikum und stellen nicht notwendigerweise Prüfungsfragen dar. Nicht alle Fragen können ausschließlich mit den Informationen aus dem Skriptum beantwortet werden. Recherchieren sie selbstständig und diskutieren sie mit Kolleginnen und Kollegen! • Geben Sie die Formel für die Impedanz eine RC-Serienschaltung an, zeichnen Sie das dazugehörige Zeigerdiagramm für die Impedanz. Skizzieren Sie das Zeigerdiagramm für I und U und den dazugehörigen Zeitverlauf (sinusförmige Größen). Überlegen Sie, wie sich die einzelnen Skizzen verändern, wenn Sie eine bestimmte Größe variieren (R, C, ω, ...). Führen Sie die obige Aufgabe für verschiedene Kombinationen durch (RC-Parallelschaltung, RL-Serienschaltung, RLC...). • Wann verwendet man die stromrichtige-, wann die spannungsrichtige Messschaltung, wie sehen die Schaltungen aus? • Wozu braucht man einen frequenzunabhängigen Spannungsteiler? • Was gibt der Effektivwert an? Wie wird er berechnet? • Was passiert bei einer symmetrisch (unsymmetrisch) belasteten Sternschaltung, wenn man den Neutralleiter entfernt? Skizzieren Sie die Zeigerdiagramme für die Ströme und Spannungen. • Unser Stromnetz hat eine Phasenspannung von 230 Volt (Leiter zu Neutralleiter). Zwischen zwei Leitern sind es 400 V 6= 2 · 230 V. Wie kann das sein? • Sie schließen einen Kondensator mit einer Spannungsfestigkeit von Umax = 250 V an das Stromnetz an. Nach zwei Minuten explodiert er. Warum? • Sie benötigen in einer Schaltung eine Betriebsspannung von 1 V bei einem Strom von 3 bis 10 mA. Sie haben eine Batterie mit 1,5 V. Kann diese Anpassung mittels eines Spannungsteilers durchgeführt werden? Wenn ja, dimensionieren sie diesen. • Der Maximalstrom, der aus einer Schuko-Steckdose entnommen werden kann, beträgt 16 A. Welche elektrische Leistung kann ein Gerät maximal aufnehmen? • Wie groß ist die maximale Leistung bei Drehstrom (und 16 A Maximalstrom)? Ist das von der Schaltung (Stern/Dreieck) abhängig? • Wie ist der Effektivwert definiert und wie hängen Spitzenwert und Effektivwert bei einer a) sinusförmigen b) symmetrisch rechteckförmigen Spannung zusammen? • Einer Wechselspannung von 230 V wird eine Gleichspannung von 100 V überlagert. Wie hoch ist der Effektivwert? 2.9. FRAGEN 57 • Die sinusförmige Spannung einer idealen Spannungsquelle wird mit einem kapazitiven Teiler bestehend aus zwei Kondensatoren mit je 2 µF geteilt. Bilden Sie eine Ersatzquelle für den Ausgang des Teilers. Wie groß ist der Ausgangswiderstand? 58 KAPITEL 2. NETZWERKE UND DREHSTROM INSTITUT FÜR MIKROELEKTRONIK UND MIKROSENSORIK JOHANNES KEPLER UNIVERSITÄT LINZ Praktikum Elektrotechnik WS 2017 Protokoll Übung 2: Netzwerke und Drehstrom Übungsdatum Abgabedatum Name Name Matr.Nr. Matr.Nr. Unterschrift Unterschrift 60 KAPITEL 2. NETZWERKE UND DREHSTROM 61 Kapitel 3 Transformator 3.1 3.1.1 Theoretische Grundlagen des Transformators Idealer Transformator Transformatoren und Übertrager bestehen aus zwei oder mehreren Wicklungen (Spulen), die magnetisch durch einen Eisenkern miteinander gekoppelt sind. Sie dienen zur Spannungs–, Strom– und Widerstandsanpassung und –umformung, sowie zur Trennung von Stromkreisen (galvanische Trennung). Abbildung 3.1: Schematische Darstellung eines Transformators In Abbildung 3.1 bezeichnet Φh den Hauptfluss, welchen die Ströme beider Spulen gemeinsam aufbauen (im Nennbetrieb wirken die beiden Durchflutungen gegeneinander), Φ1σ und Φ2σ die Streuflüsse der Primär- und Sekundärwicklung (jener Teil des Flusses der die jeweils andere Spule nicht durchtritt). Als Streufluss bezeichnet man jenen Teil des Flusses, welcher nicht zur Energieübertragung beiträgt und sich außerhalb des Eisenkerns schließt. Mit N1 und N2 werden die Windungszahlen der beiden Wicklungen bezeichnet. Beim idealen (das heißt verlustlosen) Transformator ist die aufgenommene Leistung gleich der abgegebenen Leistung. Der reale Transformator verursacht dagegen Verluste, die in der Wicklung und im Kern entstehen. 62 KAPITEL 3. TRANSFORMATOR Die Grundlage des Transformators bildet das Induktionsgesetz dΦ . dt u(t) = N (3.1) Damit ergeben sich Primär- und Sekundärspannung zu dΦh dt dΦh . uh2 (t) = N2 dt uh1 (t) = N1 (3.2) Daraus folgt unmittelbar das Spannungsübersetzungsverhältnis ü = 3.1.2 uh1 N1 = . uh2 N2 (3.3) Ersatzschaltbild des realen Transformators Herleitung Für die Primärseite (u1 ) und die Sekundärseite (u2 ) gelten mit den ohmschen Widerständen der Primär- bzw. Sekundärwicklung (R1 , R2 ) dΦ1 dt dΦ2 u2 = i 2 R 2 + N 2 dt u1 = i 1 R 1 + N 1 (3.4) wobei sich die Gesamtflüsse Φ1 und Φ2 zu Φ1 = Φh + Φ1σ Φ2 = Φh + Φ2σ und (3.5) ergeben. Mit den Gleichungen Φ= I Z ~ dA ~ B ~ d~s = i N H (3.6) und s ~ = µH ~ B ergibt sich der Hauptfluss zu Φh = 1 Rm, F e (i1 N1 + i2 N2 ) , mit Rm, F e = lF e µAF e (3.7) und die Streuflüsse zu A1,Lu i1 N 1 l1,Lu A2,Lu i2 N 2 . = µ0 l2,Lu Φ1σ = µ0 Φ2σ (3.8) 3.1. THEORETISCHE GRUNDLAGEN DES TRANSFORMATORS 63 In Gleichung (3.7) bezeichnet AF e den Querschnitt und lF e die mittlere Länge des Eisenkerns. ALu und lLu der Gleichungen (3.8) bezeichnen die mittleren Querschnitte und Längen der Streupfade, wobei der Eisenpfad aufgrund des kleinen magnetischen Widerstandes im Vergleich zu Luftpfaden vernachlässigt wird. Die Wicklungen besitzen daher die Streuinduktivitäten A1,Lu l1,Lu A2,Lu = N22 µ0 l2,Lu (3.9) AF e lF e A Fe = N22 µ lF e (3.10) L1σ = N12 µ0 L2σ und die Hauptinduktivitäten L1h = N12 µ L2h sowie eine gemeinsame Gegeninduktivität AF e . lF e Die Spannungsgleichungen (3.4) gehen somit über in M = N1 N2 µ di1 di2 di1 + L1h +M dt dt dt di2 di1 di2 + L2h +M . u2 = i2 R2 + L2σ dt dt dt (3.11) u1 = i1 R1 + L1σ (3.12) Zur einfacheren Darstellung der Verhältnisse ist es üblich, beide Gleichungen auf die Windungszahlen der Primärseite zu beziehen. Die auf die Primärseite umgerechneten Sekundärgrößen werden mit (′ ) bezeichnet und lauten daher N2′ = N1 = N2 ü u′2 = u2 ü u′2 i′2 = u2 i2 ⇒ ′ 2 i′2 2 R2 = i2 R2 L′2σ = L2σ ü2 ⇒ L′2h = L2h ü2 = N22 µ 1 ü ′ R2 = R2 ü2 i′2 = i2 (3.13) A A N12 = N12 µ = L1h . 2 l N2 l Erweitert man in den Spannungsgleichungen (3.12) die sekundärseitigen Größen folgendermaßen mit dem Übersetzungsverhältnis d iü2 di1 di1 u1 = i1 R1 + L1σ + L1h + M ü dt dt dt i2 i2 d d di1 i2 u2 ü = R2 ü2 + L2σ ü2 ü + L2h ü2 ü + M ü dt dt dt ü (3.14) 64 KAPITEL 3. TRANSFORMATOR und beachtet AF e AF e N1 = N12 µ = L1h lF e N2 lF e = L1h M ü = N1 N2 µ 2 L2h ü = L′2h und (3.15) so erhält man di1 di1 di′2 u1 = i1 R1 + L1σ + L1h + dt dt dt ′ di1 di′2 ′ ′ ′ ′ di2 u2 = i2 R2 + L2σ + L1h + . dt dt dt (3.16) Der Übergang von den Augenblickswerten mit Hilfe der komplexen Schreibweise auf die komplexen Zeiger ergibt u(t) = Re (U (t)) i(t) = Re (I(t)) ωL = X . mit U (t) = Ũ ejωt ˜ jωt mit I(t) = Ie (3.17) Eingesetzt in (3.16) erhält man daraus Ũ1 = I˜1 R1 + jX1σ I˜1 + jXh I˜1 + I˜2′ ′ ˜′ Ũ2′ = I˜2′ R2′ + jX2σ I2 + jXh I˜1 + I˜2′ . (3.18) Wenn man noch zusätzlich die Eisenverluste VF e durch einen Verlustwiderstand RF e berücksichtigt, ergibt sich die Ersatzschaltung nach Abbildung 3.3. Ein idealer Transformator ohne Verluste und ohne Streufelder kann durch ein Ersatzschaltbild, wie es in Abbildung 3.2 dargestellt ist, beschrieben werden. Da die Hauptinduktivitäten L1h und L′2h Abbildung 3.2: Ersatzschaltbild eines verlustlosen Transformators ohne Streufeld gleich groß sind, können Primär- und Sekundärwicklung im Ersatzschaltbild durch eine einzige Reaktanz Xh = ωL1h berücksichtigt und Primär- und Sekundärkreis miteinander verbunden werden. Dabei müssen die sekundärseitigen Größen mit dem Übersetzungsverhältnis auf die Primärseite umgerechnet werden. Die Eisenverluste werden durch einen Wirkstrom I˜F e durch RF e parallel zum Blindstrom (Magnetisierungsstrom), I˜m durch die Hauptreaktanz Xh modelliert. Die Streuinduktivitäten L1σ und L′2σ werden durch die ′ Streureaktanzen X1σ und X2σ dargestellt. Die Kupferverluste in Primär- und Sekundärspule werden durch die Widerstände R1 und R2 repräsentiert. 3.1. THEORETISCHE GRUNDLAGEN DES TRANSFORMATORS 65 Abbildung 3.3: Ersatzschaltbild des realen Transformators Eisenverluste Die Eisenverluste setzen sich aus Hysterese- und Wirbelstromverlusten zusammen. VF e = VHy + VW (3.19) Die Hystereseverluste entstehen im Eisenkern durch die andauernde Ummagnetisierung infolge der angelegten Wechselspannung. Sie sind proportional der Frequenz der Wechselspannung und der Fläche der Hysteresekurve. Aus diesem Grund werden spezielle Trafobleche mit möglichst schmaler Hystereseschleife (magnetisch weiches Material) verwendet. Die Wirbelstromverluste entstehen im Eisenkern, der wie eine geschlossene Wicklung wirkt. Die Ausbreitung der Wirbelströme kann durch Lamellierung des Eisenkerns oder durch Verwendung gesinterter Pulverkerne reduziert werden. Die Wirbelstromverluste sind proportional f 2 B 2 . Kupferverluste Die Kupferverluste sind die ohmschen Verluste der beiden Wicklungen, die im Ersatzschaltbild durch R1 und R2′ berücksichtigt sind. Sie ergeben sich zu VCu = I12 R1 + I22 R2 (3.20) Es ist zu beachten, dass die Kupferverluste immer für die Betriebstemperatur der Wicklungen (75◦ C) angegeben werden. Im kalten Zustand (ϑ) gemessene Werte sind daher auf Betriebstemperatur umzurechnen. 75◦ − ϑ 75◦ ϑ (3.21) VCu = VCu 1 + 235◦ + ϑ Leerlauf– und Kurzschlussversuch Mit diesen beiden Versuchen lassen sich die Größen im Ersatzschaltbild (näherungsweise) bestimmen. Die im Leerlauf vom Transformator aufgenommene Verlustleistung PL wird zum überwiegenden Teil von den Eisenverlusten bestimmt, da die Kupferverluste wegen der geringen 66 KAPITEL 3. TRANSFORMATOR Stromaufnahme vernachlässigbar sind. Die Leerlaufleistung PL kann den Eisenverlusten VF e gleichgesetzt werden. Weiters sind die Streuinduktivitäten typischerweise wesentlich kleiner als die Hauptinduktivität, weshalb die Hauptreaktanz der Primärreaktanz näherungsweise gleichgesetzt werden kann. Im Kurzschlussfall ist nur eine geringe Spannung erforderlich, um große Ströme im Transformator zu treiben. Es wird deshalb eine wesentlich kleinere Hystereseschleife durchlaufen und die Eisenverluste sind damit sehr klein. Die Kurzschlussleistung PK ergibt sich daher zu PK = I12 R1 + I22 R2 = VCu . (3.22) Für die Streuinduktivitäten gilt meist L1σ ≈ L′2σ = L2σ ü2 . Schaltzeichen Abbildung 3.4 zeigt das Schaltzeichen eines einphasigen Transformators. Abbildung 3.4: Schaltzeichen eines Transformators mit zwei getrennten Wicklungen 3.2. ÜBUNGSDURCHFÜHRUNG 67 Abbildung 3.5: Aufgeschnittener Drehstromtrafo. Auf jedem Schenkel des Eisenkerns sitzt je eine Primär– und eine Sekundärwicklung. Zur Kühlung ist der Trafo in einem ölgefüllten Gehäuse eingebaut. Quelle: Wikipedia 3.2 3.2.1 Übungsdurchführung Bestimmen des Transformator–Ersatzschaltbildes Auf ihrem Steckbrett steht ihnen ein kleiner Trafo in einem PVC–Gehäuse zur Verfügung. Der Trafo hat zwei Wicklungen die an den Pins herausgeführt sind. Diesen Trafo sollen Sie charakterisieren. Bestimmen Sie dazu zunächst die Kupferwiderstände mit einem Multimeter. Leerlaufversuch Ermitteln Sie das Spannungsübersetzungsverhältnis des Transformators, indem Sie den Trafo auf der Primärseite mit Û1 = 8 V (Scheitelwert), 1 kHz (fix) aus dem Funktionsgenerator speisen und auf der Sekundärseite die Leerlaufspannung messen (mit Multimeter). Oszillographieren Sie anschließend Strom und Spannung auf der Primärseite des leerlaufenden Trafos und messen Sie so U1 und I1 , sowie deren Phasenverschiebung ϕ. Verwenden Sie zur Strommessung einen Shunt von 10 Ω nach Abbildung 1.25 (Seite 33). Beachten Sie, dass Sie bei der Phasenmessung durch die gemeinsame Masse der Oszilloskopeingänge die Shuntspannung invertieren müssen, um die richtige Phase zu erhalten. Verwenden Sie für diese Messung folgenden Tabellenkopf: 68 KAPITEL 3. TRANSFORMATOR Û1 V ÛS V U1 V I1 U2 mA V ϕ cos ϕ S1 P1 mVA mW Dabei ist ÛS die Spannungsamplitude, die Sie am Shunt messen, S1 = U1 I1 die Scheinleistung und P1 die Wirkleistung, die der Trafo aufnimmt und die den Eisenverlusten VF e entspricht. Zeichnen Sie für einen beliebigen Betriebsfall (U1 > 0) den zeitlichen Verlauf von U1 (t), I1 (t), P1 und B(t) für 2 Perioden in ein gemeinsames Diagramm. Kurzschlussversuch Hier wird der Ausgang des Trafos kurzgeschlossen und dann die Eingangsspannung so eingestellt, dass sich als primärseitig aufgenommene Ströme folgende Werte ergeben: Iˆ1 = 4 mA, 8 mA, 15 mA, 30 mA und 50 mA. Zu messen, berechnen bzw. zu oszillographieren sind folgende Größen: Û1 V ÛS V U1 V I1 ϕ mA cos ϕ 75 S1 P1 VCu mVA mW mW ◦ 75 = f(I1 ). Vergleichen Sie die Werte von R1 Zeichnen Sie aus den berechneten Größen VCu und R2 mit denen die Sie mit dem Multimeter erhalten haben. ◦ Auswertung Bestimmen Sie nun aus den gewonnenen Daten die Parameter des Ersatzschaltbildes. Entsprechen die Werte Ihren Erwartungen? Wie groß ist der Ausgangswiderstand des Trafos, wenn Sie ihn als Quelle betrachten? (Hinweis: Dieser hängt nicht nur vom Trafo ab!) In welchem Betriebszustand weist der Trafo • die geringsten absoluten Verluste • den besten Wirkungsgrad auf? Kommentieren Sie ihre Überlegungen. Überprüfen Sie anhand des folgenden Belastungsversuchs, ob der Trafo das von Ihnen prognostizierte Quellen–Verhalten zeigt (vergleichen Sie die gemessenen Werte von U2 mit den berechneten). Kommentieren Sie das Ergebnis Ihrer Untersuchung. Belastungsversuch Belasten Sie die Sekundärseite des Trafos mit den Lastwiderständen RL = 10 kΩ, 4,7 kΩ, 2 kΩ, 1 kΩ, 680 Ω, 330 Ω, 220 Ω, 150 Ω, 100 Ω, 55 Ω, 33 Ω und 0 Ω und messen bzw. berechnen Sie die Größen für die nachstehende Tabelle. Der Wirkungsgrad η ergibt sich aus η = P2 /P1 . Kontrollieren Sie vor jeder Messung die Eingangsspannung des Transformators und stellen Sie Û1 = 6 V ein. Zeichnen Sie aus den berechneten Größen die Diagramme P2 = f(P1 ), cos ϕ = f(P1 ) und η = f(P1 ). Û1 V ÛS V U1 V I1 U2 mA V ϕ cos ϕ S1 P1 P2 η mVA mW mW % 3.2. ÜBUNGSDURCHFÜHRUNG 3.2.2 69 Eigenbau–Trafo Bauen sie nun aus zwei Spulen und den beiden Kernhälften einen Transformator. Die Windungszahlen werden ihnen vom Übungsleiter mitgeteilt. Hinweis: Achten sie beim Zusammenbau darauf, dass die beiden Kernhälften frei von Verunreinigungen sind und der der Kern ordentlich geschlossen ist. Stecken sie einen kleinen Brückenverbinder unter dem Kern in das Steckbrett. Dadurch wird der Kern etwas angehoben und ein unerwünschter Luftspalt vermieden. Trafo ohne Luftspalt Bestimmen Sie wiederum die Parameter des Ersatzschaltbildes dieses Trafos. Dokumentieren Sie die Messungen in geeigneter Weise (wie bei voriger Aufgabe). Stellen Sie einmal die Frequenz der Quelle auf einen möglichst geringen Wert und versuchen Sie dann, die obere Kernhälfte aus dem Trafo zu ziehen. Wiederholen Sie den Versuch mit einer anderen Primärwindungsanzahl und dokumentieren (und begründen) Sie Ihre Beobachtung. Trafo mit Luftspalt Fügen sie nun in den Magnetkreis des Trafos einen Luftspalt ein. Vom Übungsleiter erhalten sie dazu einen speziellen selbstklebenden Luftspalt zum Applizieren zwischen den beiden Kernhälften. (Nach der Übung ist der Luftspalt gemeinsam mit den Kopien ihrer Mitschrift abzugeben!) Wiederholen sie nun die Messungen für den Trafo mit geändertem Magnetkreis und vergleichen sie die Ergebnisse mit denen ohne Luftspalt. Kommentieren sie die Unterschiede (und die Auswirkung des Luftspaltes) im Protokoll und berechnen sie aus den gemessenen Werten die Dicke des Luftspaltes. (Hinweis: Für die Berechnung benötigen Sie den Eisenquerschnitt!) Überlegen Sie, welche Vor- bzw. Nachteile ein Trafo mit Luftspalt hat und welche Anwendung für einen solchen Trafo geeignet ist. 70 KAPITEL 3. TRANSFORMATOR 3.3 Fragen Die Fragen dienen der Vorbereitung auf das Praktikum und stellen nicht notwendigerweise Prüfungsfragen dar. Nicht alle Fragen können ausschließlich mit den Informationen aus dem Skriptum beantwortet werden. Recherchieren sie selbstständig und diskutieren sie mit Kollegen! • Ist Kupfer ein Kalt– oder Heissleiter? • Was bedeutet ‘galvanische Trennung’ ? • Zeichnen sie das Trafo–Ersatzschaltbild und benennen sie die Komponenten. • Leiten sie den formellen Zusammenhang zwischen Windungszahlen und Übersetzungsverhältnis her. • Wodurch entstehen in einem Trafo Verluste und mit welchen konstruktiven Maßnahmen kann man diese minimieren? • Überlegen sie, wie man bei einem Schweißtrafo den Ausgangsstrom (bei Schweißbetrieb = im Kurzschlussfall) verstellen könnte ohne dabei eine hohe Verlustleistung in Kauf nehmen zu müssen. • Oft hört man Transformatoren brummen. Woran liegt das? Welcher physikalische Effekt verursacht das Geräusch und welche Frequenz hat der Brummton? • Ihr Onkel aus Japan hat ihnen völlig blauäugig an Stelle eines Radios/Videos/TV einen Jodelautomaten geschenkt, der nur mit 110 Volt Netzspannung betrieben werden kann. Sie haben einen 1:1 Trafo für den Betrieb an 230 Volt. Können sie mit diesem (ohne den Trafo zu verändern) eine Spannung von 110 Volt erreichen? Wenn ja, wie? • Zeichnen sie für einen Trafo im Leerlauf/Kurzschluss den Verlauf von Fluss / Primärstrom / Sekundärspannung bei sinusförmiger Primärspannung. • Modellieren Sie den Magnetkreis eines Trafos mit magn. Spannungsquellen und magn. Widerständen. INSTITUT FÜR MIKROELEKTRONIK UND MIKROSENSORIK JOHANNES KEPLER UNIVERSITÄT LINZ Praktikum Elektrotechnik WS 2017 Protokoll Übung 3: Transformator Übungsdatum Abgabedatum Name Name Matr.Nr. Matr.Nr. Unterschrift Unterschrift 72 KAPITEL 3. TRANSFORMATOR 73 Kapitel 4 Filter und Schwingkreise 4.1 4.1.1 Allgemeines Dämpfungsmaß und Bodediagramm Das Dämpfungsmaß a ist das logarithmische Verhältnis von Eingangsleistung zu Ausgangsleistung einer elektronischen Schaltung. Seine Maßeinheit ist das Dezibel (dB). P1 (4.1) a = 10 log P2 Ist der Bezugswiderstand, in dem die Leistung umgesetzt wird, für Eingang und Ausgang gleich, so kann das Leistungsverhältnis in ein Spannungs- oder Stromverhältnis umgewandelt werden (P = U 2 /R = I 2 R) und es ergibt sich mit Hilfe der Rechenregeln für Logarithmen: |U1 | a = 20 log und (4.2) |U2 | |I1 | a = 20 log (4.3) |I2 | Häufig wird auch der Betrag des komplexen Übertragungsverhältnisses ü = uuae in Dezibel angegeben (20 log (|ü|)). Ein Diagramm, in dem sowohl der Logarithmus des Betrags (in dB) als auch die Phase des Übertragungsverhältnisses über dem Logarithmus der Frequenz dargestellt ist, heißt Bodediagramm. Abbildung 4.1 zeigt ein solches Bodediagramm für den einfachen Fall eines RC-Tiefpasses (Abbildung 4.2). 4.1.2 Bandbreite und Grenzfrequenz Der Kurvenverlauf im Bodediagramm wird oft durch Geradenstücke angenähert. In Abbildung 4.1 a) kann also der Teil links von fg durch eine waagrechte Gerade und der Teil rechts von fg durch eine Gerade mit der Steigung −1 ersetzt werden, wenn 20 dB durch dieselbe Länge repräsentiert werden wie eine Dekade der Frequenz (U2 nimmt mit 20 dB/Dekade ab). Diese beiden Geraden schneiden sich genau bei √ fg . fg ist jene Frequenz, bei der die Ausgangsspannung U2 auf den 1/ 2-fachen Wert der maximalen Ausgangsspannung abgesunken ist (−3 dB-Punkt), sie heißt Grenzfrequenz. Bei 74 KAPITEL 4. FILTER UND SCHWINGKREISE Abbildung 4.1: Bodediagramm eines RC-Tiefpasses der Grenzfrequenz ist die Ausgangsleistung die Hälfte der maximalen Ausgangsleistung und beim RC-Glied eilt die Ausgangsspannung der Eingangsspannung um exakt 45◦ nach. Bei Schaltungen, deren Ausgangsgröße (Strom oder Spannung) ein Maximum besitzt, treten zwei Grenzfrequenzen fgo und √ fgu oberhalb und unterhalb des Maximums auf, bei denen die Ausgangsgröße um 1/ 2 abgesunken ist. Die Differenz zwischen fgo und fgu heißt Bandbreite B. B = fgo − fgu 4.2 (4.4) Filter Filter sind aus passiven und aktiven oder nur aus passiven Elementen aufgebaute Netzwerke, deren Übertragungsverhalten frequenzabhängig ist und deutlich getrennte Durchlassund Sperrbereiche besitzt. Bei Filtern unterscheidet man je nach Lage der Grenzfrequenzen vier Grundtypen: Tiefpass, Hochpass, Bandpass und Bandsperre. Tiefpass Tiefpässe haben die Aufgabe, unerwünschte Frequenzen eines Spektrums, wie sie z. B. bei der Modulation, Demodulation, Gleichrichtung, Verstärkung entstehen, oberhalb einer bestimmten Grenzfrequenz zu unterdrücken. Hochpass Im Gegensatz zum Tiefpass soll der Hochpass Frequenzen oberhalb der Grenzfrequenz möglichst ohne Dämpfung übertragen und unterhalb sperren. 75 4.3. SCHWINGKREISE Bandpass Aufgabe des Bandpasses ist es, nur ein ganz bestimmtes Frequenzband passieren zu lassen (Durchlassbereich) und alle anderen Frequenzen zu sperren. Bandpässe werden z. B. in Empfängern eingesetzt, um unerwünschte von erwünschten Frequenzen zu trennen, oder in Sendern, um störende Modulationsprodukte von der Antenne fernzuhalten. Bandsperre Die Bandsperre ist das Gegenteil“ vom Bandpass, d. h. sie sperrt ein definiertes Frequenz” band und lässt alle anderen Frequenzen passieren. 4.3 Schwingkreise Die Theorie zu den Schwingkreisen ist in den Vorlesungsskripten zu Elektrotechnik nachzulesen. 4.3.1 Parallelschwingkreis Der Parallelschwingkreis ist eine frequenzabhängige Schaltung, bestehend aus einem Widerstand, einer Induktivität und einer Kapazität, die parallel geschaltet sind. Wird eine Wechselspannung an den Schwingkreis gelegt, so gerät dieser bei einer bestimmten Frequenz in Resonanz. Diese Resonanzfrequenz ist abhängig von der Kapazität und der Induktivität. 1 ωR = √ (4.5) LC Im Resonanzfall hat der Parallelschwingkreis seinen größten Widerstand. Das bedeutet, dass der Gesamtstrom ein Minimum wird. In der Induktivität bzw. Kapazität können Ströme auftreten, die erheblich höher als der Gesamtstrom sind, sich aber durch ihre entgegengesetzte Phasenlage kompensieren ( Stromüberhöhung“). ” Das Verhältnis vom Spulenstrom bzw. Kondensatorstrom zum Gesamtstrom bei der Resonanzfrequenz wird als Gütefaktor oder Güte Qp bezeichnet. r |IL | C =R Qp = |I| ω=ωR L (4.6) Der Kehrwert der Güte ist der Verlustfaktor oder die Dämpfung d1 . Die Bandbreite B des Parallelschwingkreises bestimmt sich aus jenen beiden Frequenzen, an denen die Spannung am Schwingkreis auf den √12 -fachen Wert der Spannung bei Resonanzfrequenz abgesunken ist, wenn der Schwingkreis mit einer idealen Stromquelle angespeist wird. B= 1 ωR 1 = . RC Qp (4.7) Achtung, verwechseln Sie die Dämpfung d eines Schwingkreises nicht mit dem in Abschnitt 4.1.1 eingeführten Dämpfungsmaß! 76 KAPITEL 4. FILTER UND SCHWINGKREISE 4.3.2 Serienschwingkreis Der Serienschwingkreis stellt die zum Parallelschwingkreis duale Schaltung dar, bei welcher Widerstand, Induktivität und Kapazität in Serie geschaltet sind. Die Resonanzfrequenz berechnet sich genauso wie beim Parallelschwingkreis, jedoch hat der Serienschwingkreis bei der Resonanzfrequenz seinen kleinsten Widerstand. Das bedeutet, dass der Gesamtstrom ein Maximum wird. An der Induktivität bzw. Kapazität können Spannungen auftreten, die erheblich höher als die Gesamtspannung sind, sich aber durch ihre entgegengesetzte Phasenlage kompensieren ( Spannungsüberhöhung“). ” Entsprechend der Dualität von Serien- und Parallelschwingkreis ergibt sich für die Güte r 1 L (4.8) Qs = R C und für die Bandbreite R ωR B= = . (4.9) L Qs 4.4 Übungsdurchführung • Bei allen Messungen ist darauf zu achten, dass die Eingangsspannung konstant ist. Im Allgemeinen ist daher wegen des endlichen Innenwiderstandes des Generators nach jeder Frequenzänderung die Eingangsspannung nachzuregeln! Sollte der Aussteuerbereich nicht ausreichen, müssen sie dies in der Auswertung der Ergebnisse berücksichtigen! • Verwenden Sie zur Messung der Wechselspannungen entweder das Multimeter vom Typ MX 47 (Dieses Messgerät ermöglicht die Messung von Wechselspannungen und Wechselströmen bis 20 kHz) oder die Messfunktion des Oszilloskops (MEASURE PEAK bzw. EFFEKTIV). • Achten Sie auf den Unterschied zwischen Spitzenwert und Effektivwert. • Messen Sie bei allen Messaufgaben im Bereich starker Änderungen der Ausgangsspannung zusätzliche Frequenzpunkte. • Der vermessene Frequenzbereich sollte mindestens die Dekade unter und die über der Eckfrequenz bzw. Resonanzfrequenz erfassen. 4.4.1 Tiefpass Bauen sie einen Tiefpass entsprechend Abbildung 4.2 auf. Vom Übungsleiter werden ihnen entweder die Werte für R und C oder die erforderliche Grenzfrequenz bekanntgegeben (Wählen sie eine geeignete Bauteilkombination aus den zur Verfügung stehenden Bauteilen aus). Ermitteln sie anschließend das Bode–Diagramm des Tiefpasses indem sie das Übertragungsverhalten an mindestens 10 verschiedenen Frequenzen messen. Wählen sie dazu eine geeignete Verteilung der Messpunkte. Bestimmen sie die Grenzfrequenz des Tiefpasses rechnerisch aus den Bauteilwerten und grafisch aus dem Diagramm. Vergleichen Sie beide Ergebnisse. 77 4.4. ÜBUNGSDURCHFÜHRUNG R ue ua C Abbildung 4.2: RC–Tiefpass 4.4.2 Serienschwingkreis Bauen sie einen Schwingkreis entsprechend Abbildung 4.3 auf und nehmen sie das Bode– Diagramm auf (mindestens 10 Messpunkte). Die Werte für R, C und L werden ihnen vom Übungsleiter bekanntgegeben. Dokumentieren sie neben Ûe , Ûa und ϕ auch die Spannungen ÛC und ÛL ! Die Spannungen Ûe und Ûa , die Frequenzen und der Phasenwinkel ϕ = ϕua − ϕue sind mit dem Oszilloskop zu messen (Achten Sie auf die gemeinsame Masse!). Die Spannungen UC und UL sind mit dem Multimeter zu messen und in Spitzenwerte umzurechnen. R C uC ue ua L uL Abbildung 4.3: Serienschwingkreis Bestimmen Sie die Resonanzfrequenz des Serienschwingkreises rechnerisch aus den Bauteilwerten und grafisch aus dem Diagramm. Vergleichen Sie die Ergebnisse. Ermitteln Sie weiters grafisch die Bandbreite des Schwingkreises. 4.4.3 Bandpass Bauen sie einen Bandpass entsprechend Abbildung 4.4 auf. Die Bauteilwerte werden ihnen wieder vom Betreuer bekanntgegeben. Ermitteln sie anschließend das Bode–Diagramm der Schaltung indem sie das Übertragungsverhalten an mindestens 15 verschiedenen Frequenzen messen. Wählen sie dazu eine geeignete Verteilung der Messpunkte. Bestimmen Sie die Grenzfrequenzen des Bandpasses rechnerisch aus den Bauteilwerten und grafisch aus dem Diagramm. Vergleichen Sie die Ergebnisse. 78 KAPITEL 4. FILTER UND SCHWINGKREISE C1 ue L1 C2 L2 R ua Abbildung 4.4: Bandpass 4.5 Fragen Die Fragen dienen der Vorbereitung auf das Praktikum und stellen nicht notwendigerweise Prüfungsfragen dar. Nicht alle Fragen können ausschließlich mit den Informationen aus dem Skriptum beantwortet werden. Recherchieren sie selbstständig und diskutieren sie mit Kollegen! • Warum wird für die Beschreibung von Grenzfrequenzen die -3 dB – Marke verwendet? • Wie groß ist der Widerstand eines verlustlosen a) Serienschwingkreises b) Parallelschwingkreises im Resonanzfall? • Leiten sie die Resonanzfrequenz eines LC–Parallelschwingkreises als Funktion der Windungszahl der zylindrischen Luftspule her. • Warum haben zwei räumlich getrennte Spulen mit je 100 Windungen bei Serienschaltung eine geringere Induktivität als eine Spule mit 200 Windungen? Notieren sie den formellen Zusammenhang und finden sie eine phyikalische Begründung. • Sie haben einen RC–Tiefpass erster Ordnung als integriertes Bauteil mit 3 Anschlüssen zu Hand, benötigen aber einen Hochpass mit gleicher Resonanzfrequenz. Können sie das Bauteil gebrauchen? Wenn ja, welche Anpassung müssen sie vornehmen um aus dem Tiefpass einen Hochpass zu machen? • Für eine Schaltung benötigen sie eine Spule mit einer Induktivität von 245 mH. Ihr Lieferant bieten aber nur Werte von 100 mH und 500 mH an. Welche Möglichkeiten gibt es den gewünschten Wert zu erhalten? INSTITUT FÜR MIKROELEKTRONIK UND MIKROSENSORIK JOHANNES KEPLER UNIVERSITÄT LINZ Praktikum Elektrotechnik WS 2017 Protokoll Übung 4: Filter und Schwingkreise Übungsdatum Abgabedatum Name Name Matr.Nr. Matr.Nr. Unterschrift Unterschrift