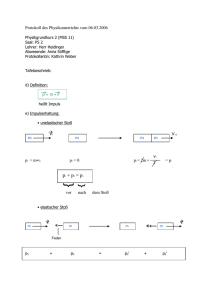
7. Impuls
Werbung

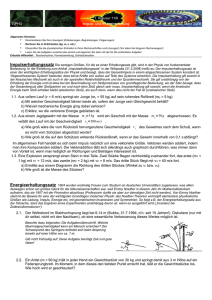
04.02.2013 7. Impuls 7.1 Definition und Impulserhaltung Versuch: Rakete Maß für die Schwierigkeit, den Bewegungszustand v eines Teilchens der Masse m zu ändern. Beispiel: Lastwagen oder Kleinwagen mit gleicher v abbremsen. Hängt ab von m und v. p mv Umgangssprache: Große Wucht oder Schwung (engl. momentum) = großer Impuls Ableitung nach der Zeit: dv dm dp d m v m v dt dt dt dt speziell für m = const: dp dm F ma v dt dt dp dv m ma F dt dt 2. Newtonsche Gesetz (allgemeine Form) System ohne äußere resultierende Kräfte (freie Körper oder abgeschlossenes System): Fext 0 v const für Fext 0 1. Newtonsche Gesetz dp 0 dt p const Impulserhaltung Der Gesamtimpuls von miteinander wechselwirkenden Teilchen eines abgeschlossenen Systems oder eines freien Teilchens bleibt zeitlich konstant. Definition: Zentraler Stoß: die stoßenden Körper bewegen sich in einer Linie 7-1 04.02.2013 Aufgabe: vorher nachher Systemgrenze Geg.: Zentraler Stoß zweier Schlittschuhfahrer ohne Reibung - mM = 70 kg vM = 0,3 m/s nach dem Abstoßen - mJ = 35 kg vJ = gesucht - Abstoßen: System = Mann + Junge in Ruhe FJ = FM Äußere Kräfte Fext 0 p ges const Vorher in Ruhe: vM v J 0 p ges 0 Nachher: p ges mM vM mJ v J 0 vJ Eisscholle unbewegt abgeschlossenes System Vorzeichen von v beachten m mM v M 2 v M 0,6 s mJ Beachte: Mechanische Gesamtenergie bleibt nicht erhalten; nicht konservative Kräfte Vorher: Wmech = Wkin + Wpot = 0 ; nachher: Wpot = 0 Wmech 1 1 2 mJ v J2 mM v M W pot 0 2 2 Wpot = 0 Gesamtenergie bleibt erhalten: Wmech wird erbracht durch chemische Energie der Beiden. kein elastischer Stoß 7.2 Elastischer Stoß Def.: Die kinetische Energie des abgeschlossenen Systems bleibt erhalten Beispiel: 7-2 04.02.2013 Geg.: v1a , v2a , m1 , m2 Stoß für v1a > v2a ; und keine Reibung, waagrechter Stoß Ges.: v1e; v2e. Zwei Unbekannte 2 Gleichungen 1. Impulserhaltung: m1 v1a m2 v2 a m1 v1e m2 v2 e 2. Energieerhaltung (Wpot = 0): 1 1 1 1 m1 v12a m2 v22a m1 v12e m2 v22e 2 2 2 2 Lösungsweg: v2 e v1e v2 a v1a Aus 1. und 2. Differenz nachher > 0 = Differenz vorher < 0 Entfernungsgeschwind. = Annäherungsgeschw. v1e m1v1a m2 2v2 a v1a m1 m2 v2 e Versuch: Luftkissenbahn (Video #11) 1. Elastischer Stoß Geg.: v2 a 0; m1 m2 m v1e m v1a m v1a 0 2m v2 e 0 m 2 v1a v1a 2m 7-3 Vorzeichenumkehr v2e > v1e m2v2 a m1 2v1a v2 a m1 m2 04.02.2013 7.3 Inelastischer Stoß (plastisch) Def.: Die gesamte kinetische Energie des abgeschlossenen Systems bleibt nicht erhalten Vereinfachung: vollständiger inelastischer Stoß, gemeinsame Bewegung nach dem Stoß d.h. Relativgeschwindigkeit nach dem Stoß = 0, d.h. v1e v2e abgeschlossenes System: waagrecht, keine Reibung Impulserhaltung pa m1 v1 m2 v2 pe ( m1 m2 ) ve = ve m1 v1 m2 v2 m1 m2 Versuch Luftkissenbahn (Video #12) 2. Inelastischer Stoß ve mit m1 m2 m und v2 0 : m1 1 v1 v1 m1 m2 2 Energiebetrachtung (mit Wpot = 0, wg. waagrechter Stoß): Vorher 1 1 Wkin,a m1v12 m2 v22 2 2 Wkin Wkin ,a Wkin ,e nachher Wkin ,e 1 m1 m2 v1 v2 2 2 m1 m2 1 ( m1 m2 ) ve2 2 keine mechanische Energieerhaltung nur für v1 = v2 kein Stoß Gesamtenergie bleibt aber erhalten ! Differenz Wkin 0 → Thermische Energie, Verformungsenergie In der Praxis: meist weder vollständig elastisch noch vollständig inelastisch 7-4 04.02.2013 7.4 Stöße in mehreren Dimensionen kein zentraler Stoß: vektorielle Form Zur Vereinfachung Sonderfall: Vollständig inelastischer Stoß (veränderte Wkin ) nur mges bewegt sich nur ein ve Beispiel: p ges m1 v1 m2 v2 (m1 m2 ) ve Beispiel 1: Zwei Autos mit rechtwinkeligem vollständig inelastischen Stoß: Geg.: v1 v1 ex v2 v 2 e y vorher: nachher: ve 1 m1 m2 p1 m1 v1 ex p2 m2 v2 e y m v p ges p1 p2 1 1 m2 v2 p ges m1 v1 1 ve m1 m2 m1 m2 m2 v2 m1v1 2 m2v2 2 p2 m2 v2 tg p1 m1v1 Lösung: 2 Gleichung für 2 Unbekannte vex , vey 7-5 ges: ve lösbar 04.02.2013 Beispiel 2: Schiefer vollständig elastischer Stoß auf eine Wand Geg: p1a und v2 a v2 e 0 d.h. unverrückbare Wand; Wkin = const. keine Reibung Stoß: p x : py : ohne Reibung unverändert, kein Abbremsen v x const kein Stoß aus 7.2: v1e m1v1a m2 2v2 a v1a m1 m2 mit v2 a 0 und v1a v ya v ye v2 e m2 v2 a m1 2v1a v2 a m1 m2 m1v ya m2 v ya m1 m2 v ye unverrückbare Wand v2e 0 m1 v ya v ya m2 m1 1 m2 m1 0 oder m2 m2 und v2e m1 2v ya m1 m2 und v2 e m1 2v ya m2 m1 1 m2 v ye v ya v y const und p y p ya p ye m1 v ya v ya 2 p y und mit p x const 7.5 Kraftstoß Der Gesamtimpuls bleibt erhalten, der Impuls der einzelnen Körper ändert sich aber. Wie groß ist er? Zeitlicher Verlauf? dpt F (t ) dt pe t e d p F t dt pa ta t e pe pa p F (t ) dt Kraftstoß oder Impulsübertrag ta 7-6 04.02.2013 typischer Kraftverlauf für Stoß: te t t a vorher: ta t t e nachher: F = 0 F (t ) dt F = 0 t Kontaktzeit sehr klein (ms-Bereich) Fmax oft sehr groß. Beispiel: Finger einzwicken in Türe: Finger ist Sensor für p der Türe Genauer Verlauf F (t ) häufig nicht bekannt. Näherung: Mittlere zeitlich konstante Kraft <F> te Flächengleichheit: F t dt p F t ta F t p tatsächliche noch größer in der Spitze, hat aber die selbe Wirkung Beispiel: Ei rollt vom Tisch h = 1 m m = 50 g Ges.: mittlere Kraftstoß beim Aufprall F p / t 1 m v2 2 Geschwindigkeit: m g h Impuls: pa m v 0,22 v 2 gh 4,4 m/s kgm s kurz vor Aufprall pe 0 p 0,22 Aufprallzeit: (ohne Reibung) nach dem Aufprall kgm s Bremsweg = ½ Eidurchmesser; Massenmittelpunkt 2 cm = h Annahme: Abbremsung = a = const 7-7 04.02.2013 mittlere Kraft: Gewichtskraft Ei: h 1 v t 2 t 2h 2 0,02 m 9 ms 4,4 m/s v F p 0,22 kgm 24 N t 9 10 3 s 2 G 0,05 9,81 0,5N Aufprallkraft ̂ ca. 50 fachen „Gewicht“ ̂ 2,4 kg allgemein: F p m Δ v 2 Wkin 2 h t Δh F Δh „Zerstörungsarbeit“ Bremsweg ~ 1 m (Knautschzone = h) Anderes Beispiel: Sicherheitsgurt Amaturenbrett ~ 10 cm 7.6 Raketenantrieb Gesucht: FS Schubkraft Ausgestoßene Masse dm 0 dm 0 dt u Ausstoßgeschw. rel. zur Rakete v-u Ausstoßgeschw. rel. zum Bezugssystem p1 m v p2 (m dm) (v dv) dm (v dv u ) Gesamtimpuls des Systems vgl. 2 Schlittschuhfahrer vor und nach der Trennung (7.1); entgegengesetzte Richtung p2 m v m dv v dm dv dm v dm dvdm u dm p1 m dv u dm p1 p2 p1 dp m dv u dm dt 7-8 04.02.2013 dp dv dm m u Fext dt dt dt Raketengleichung keine Impulserhaltung, wenn Fext 0 FS u mit m dm dt Schub oder Schubkraft mit dm 0 FS entgegen u dt dv FS Fext F dt Berechnung der Endgeschwindigkeit ve nach Brennschluß te: a) Startphase: Fext = - m· g: (g entgegengesetzt zu y) Start: v0 = 0 Startgeschwindigkeit t0 = 0 Zündzeitpunkt Brennschluß: m m0 Startmasse = Nutzlast + Treibstoff me Masse nach Brennschluß = Nutzlast te Brenndauer = Beschleunigungsdauer dv dm m g u dt dt dv u dm g dt m dt ve te me 0 0 m0 dv gdt u dt dm m mit Annahme: g = const. und u = const. v e g t e u ln me m0 Bremsen Beschleunigung ln me 0 m0 7-9 wg. me < m0 04.02.2013 b) für Fext = 0 (im Weltall im schwerelosen Zustand): Summe der äußeren Kräfte = 0 ve u ln typ. m0 me m0 10 me d.h. Nutzlast = 10% vom Startgewicht ve 2,3 u ln-Funktion begrenzt die Endgeschwindigkeit Eine weitere Reduzierung der Nutzlast bringt keinen wesentlichen Gewinn mehr. Für 1 % Nutzlast v 4,6 u Nutzlast Faktor 10 kleiner, nur doppelte Geschwindigkeit u optimieren: durch Düse, Treibstoff und mehrstufige Raketen 7-10