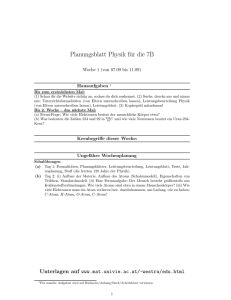
Vom Makrokosmos zum Teilchen
Werbung

Vom Makrokosmos zum Teilchen
∼ 1 cm
Kristall
1/10 000 000
10−9m
Molekül
1/10
10−10m
Atom
1/10 000
Atomkern
10−14m
1/10
Proton,
Neutron
10−15m
< 1/1000
Elektron,
Quark
1. Einführung
< 10−18m
22. Oktober 2008
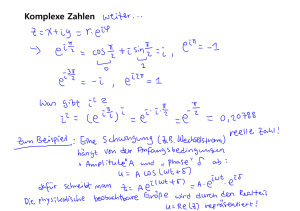
Gebiete der Physik
Kosmologie
Ursprung und Entwicklung
des Universums
Astrophysik
Vorgänge in Sternen,
Galaxien etc.
Geophysik
Erde
Mechanik
Bewegungsgesetze
makroskopischer Körper
Wärmelehre
Gase etc. (makroskopisch)
Elektrodynamik
elektr. und magnetische
Phänomene
Optik
Licht
Biophysik
belebte Materie
Festkörperphysik
Kristalle, Metalle etc.
(mikroskopisch)
Statistische Physik
Gase (mikroskopisch)
Atom- und
Molekülphysik
Elektronenhüllen
Kernphysik
Atomkerne
Teilchenphysik
Elementarteilchen
1. Einführung
QM
RT
22. Oktober 2008
Klassische Physik,
Quantenmechanik,
Relativitätstheorie
log10(L/m)
Kosmos
26
Galaxie
20
Sonnensystem
14
0
Mensch
Atom
allgemeine RT
Klassische
Physik
Spezielle
RT
E · t, p · L ≫ ~
v & 0.1c
QM
QM+RT
1
v/c
-10
Elementarteilchen -18
E · t, p · L & ~
h = 1.056 · 10−34 Js
~ = 2π
c = 3 · 108 m/s
1. Einführung
22. Oktober 2008
Experiment und Theorie
Experiment
Reproduzierbare Messung
(genau definierte Anfangsbedingungen)
Bekannte Genauigkeit −→ Messfehler
Test der
Vorhersagen
Überprüfbare
Anpassung der
Vorhersagen
Parameter
Widerlegung
von Modellen
Theorie
Mathematische Gesetzmäßigkeiten
Zurückführung auf Modelle und Axiome
Über einzelne Messungen hinaus gültig
1. Einführung
22. Oktober 2008
Physikalische Größen
Quantifizieren
Eigenschaften von Objekten und
Vorgängen
D
E
Phys. Größe = Symbol =
D
ED
E D
ED
E
Maßzahl Einheit ± Maßzahl Einheit
|
{z
}
Messfehler
Beispiel: Länge = L = 1.50 m ± 0.01 m
Symbole:
• meist lateinischer oder griechischer Buchstabe
• nicht eindeutig festgelegt (aber es gibt Konventionen)
• muss stets definiert werden!
Einheiten:
• SI-Einheitensystem
• Basis-Einheiten: m, s, kg, mol, K, A, cd
• alle anderen Einheiten davon abgeleitet
• Präfixe zur Angabe von 10er-Potenzen
1. Einführung
22. Oktober 2008
Geschwindigkeit, Beschleunigung
Hier: Geradlinige Bewegung
Quantitative Beschreibung:
Angabe des Ortes x zu jedem Zeitpunkt t
(→ Funktion x(t))
Definitionen:
dx(t)
= ẋ(t)
dt
dv(t)
d2 x(t)
Beschleunigung = a(t) =
= v̇(t) =
= ẍ(t)
dt
dt2
Einheiten: [v] = m s−1 , [a] = m s−2
Geschwindigkeit = v(t) =
Konstante
Geschwindigkeit
Konstante
Beschleunigung
v = v0 = const.
a = a0 = const.
a(t) = 0
v(t) = v0
x(t) = x0 + v0t
Anfangswert:
x0 = x(t = 0)
a(t) = a0
v(t) = v0 + a0t
x(t) = x0 + v0 t +
1
a 0 t2
2
Anfangswerte:
x0 = x(t = 0),
v0 = v(t = 0)
2.1 Kinematik
22. Oktober 2008
Differentiation
f (x + ∆x) − f (x)
df (x)
= lim
∆x→0
dx
∆x
Winkel α der
y=f(x)
Tangente:
α
∆f
∆x
tan α =
f(x)
x
x+∆ x
df (x)
dx
x
Regeln:
df
dg
d
[f (x) + g(x)] =
+
dx
dx
dx
df
dg
d
[f (x) · g(x)] =
· g(x) + f (x) ·
dx
dx
dx
dg
df
f
(x)
·
d f (x)
dx
= dx −
2
dx g(x)
g(x)
g(x)
d
df dg
f (g(x)) =
·
dx
dg dx
2.1 Kinematik
22. Oktober 2008
Integration
Zx2
x1
Fläche unter Graph von f (x)
f (x) dx =
zwischen x1 und x2
Hauptsatz der
Differential- und
Integralrechnung:
y=f(x)
f(x)
∆x*f(x 2)
d
dx
Zx
f (x′) dx′
x1
= f (x)
x1
x 2 x 2+∆ x
x
Stammfunktionen:
Zx2
x1
unbestimmtes Integral = Stammfunktion
d(Stammfunktion)
Integrand =
dx
Z
xn+1
n
Beispiel:
x dx =
n+1
f (x)dx = Stammfunktion(x2 ) − Stammfunktion(x1 )
2.1 Kinematik
29. Oktober 2008
Fehler physikalischer Messungen
Statistische Fehler:
• variieren von Messung zu Messung
• werden oft durch Messreihen ermittelt:
K Messungen:
x(1), . . . , x(K)
• Annahme: x(i) (i = 1, . . . K) Gauss-verteilt
Häufigkeit
N
N
N/e
x0−σ
x0+σ
x0
h
(x−x0)2
· exp −
2σ 2
√
N = 1/( 2πσ)
i
x
Messergebnis = xgem ± ∆xgem mit
K
xgem
σgem
∆xgem
1 X (i)
=
x ≈ x0 = Mittelwert
K i=1
v
u
K
u 1 X
(x(i) − xgem )2 ≈ σ
=t
K − 1 i=1
σgem
= Fehler des Mittelwerts
= √
K
Systematische Fehler:
• bei allen Einzelmessungen gleich
• durch Messgerät oder Messmethode bedingt
2.1 Kinematik
29. Oktober 2008
Fehlerfortpflanzung
Problemstellung:
Experimentelle Bestimmung
einer physikalischen Größe x,
die von M gemessenen Größen a1, . . . , aM
mit bekannten Messfehlern ∆a1, . . . , ∆aM
abhängt (d.h. x = x(a1, . . . , aM )).
Frage: Was ist der Fehler ∆x von x?
Antwort:
v
u
"
#2
K
uX
∂x
u
∆aj
∆x = t
∂aj
j=1
∂x/∂aj = partielle Ableitung von x nach aj
= Ableitung bei festen a1 , . . . , aj−1, aj+1, . . . , aK
(∂x/∂aj ) · ∆aj = Änderung von x
bei Variation von aj um ∆aj
Beispiel: Messung von g
• g = 2L/t2 ⇒ 2 Messgrößen L und t
• Identifiziere: x , g, a1 , L, a2 , t und K = 2
• (∂x/∂a1 ) , (∂g/∂L) = 2/t2,
(∂x/∂a2 ) , (∂g/∂t) = −4L/t3
s
s
2 2
2
∆L 2
2∆t 2
−4L
∆g =
+
∆L +
∆t = g
t2
t3
L
t
2.1 Kinematik
29. Oktober 2008
Drehbewegungen
Eindeutige Beschreibung:
• Angabe der Drehachse (o.B.d.A.: z-Achse)
• Bewegung eines Punktes um Drehachse
(o.B.d.A.: in der x-y-Ebene)
y
R = Radius
x = R cos(φ)
R sin(φ )
y = R sin(φ)
R
φ
Rcos(φ )
x
Definition:
dφ
Winkelgeschwindigkeit = ω =
;
dt
[ω] = s−1
ω = ω0 = const.:
• Periodischer Vorgang mit Periode T = 2π
ω0
ω0
• Drehfrequenz: ν = T1 = 2π
[ν] = s−1 = Hz
• Umfangsgeschwindigkeit:
vUmf = 2πR
T = 2πRν = Rω0
2.1 Kinematik
29. Oktober 2008
Vektoren und Koordinatensysteme
Vektoren:
Gerichtete Größen (z.B. Geschwindigkeit)
können durch Pfeile dargestellt werden.
Mathematische Beschreibung durch Vektoren.
z
Koordinatendarstellung
von Vektoren:
x
~
r = y
z
z
r
y
y
x
x
Koordinatensysteme:
• drei paarweise zueinander senkrechte Achsen
• jede mit Maßeinteilung
• rechtshändiges System
Rechte−Hand−Regel
Daumen zeigt
in z−Richtung
2.1 Kinematik
Finger drehen x−Achse
zur y−Achse
29. Oktober 2008
Rechenregeln für Vektoren
• Addition:
x1 + x2
x2
x1
~
r1 + ~
r2 = y1 + y2 = y1 + y2
z1 + z2
z2
z1
(Aneinandersetzen der Pfeile)
• Multiplikation mit Zahl a ∈ R:
x
ax
a·~
r=~
r · a = a · y = ay
z
az
• Betrag (Länge):
|~
r| =
• Skalarprodukt:
q
x2 + y 2 + z 2
~
r1 · ~
r2 = ~
r2 · ~
r1 = x1 x2 + y1y2 + z1 z2 = |~
r1| · |~
r2 | · cos φ
(φ ist der Winkel zwischen beiden Vektoren)
• Kreuzprodukt:
x1
x2
y1z2 − y2z1
~
r1 × ~
r2 = y1 × y2 = z1x2 − z2x1 = −~
r2 × ~
r1
z1
z2
x1 y2 − x2y1
|~
r1 × ~
r2 | = |~
r1 | · |~
r2| · sin φ
~
r1 · (~
r1 × ~
r2 ) = ~
r2 · (~
r1 × ~
r2 ) = 0
(~
r1 × ~
r2 steht senkrecht auf der Ebene,
die von ~
r1 und ~
r2 aufgespannt wird
und entspricht im Betrag der Fläche des von
~
r1 und ~
r2 gebildeten Parallelogramms)
2.1 Kinematik
29. Oktober 2008
Vektorielle Darstellung von
Geschwindigkeit u. Beschleunigung
Wenn ~
r(t) die Bahnkurve eines bewegten Objekts
beschreibt, so ist dessen
dx/dt
d
Geschwindigkeit = ~v (t) = ~
r(t) = ~
r˙(t) = dy/dt
dt
dz/dt
d2
d
r(t) = ~
r¨(t)
Beschleunigung = ~a(t) = ~v (t) = ~v˙ (t) = 2 ~
dt
dt
Beispiel: Wurfparabel
Bewegung im Schwerefeld der Erde:
• Konstante Beschleunigung mit Betrag g nach unten
(d.h. negative z-Richtung)
• o.B.d.A.: Startpunkt im Koordinatenursprung
• o.B.d.A.: Bewegung in x-z-Ebene
~v = ~v0 +
Zt
0
~a(t′)dt′ = ~v0 + ~a · t
Zt
1
~v (t′ )dt′ = ~
r0 + ~v0 · t + ~a · t2
2
0
v0,x t
x
= y
=
0
v0,z t − gt2/2
z
~
r=~
r0 +
Elimination von t ergibt mit v0,x = v0 cos φ, v0,z = v0 sin φ:
gx2
z = x tan φ − 2
2v0 cos2 φ
2.1 Kinematik
29. Oktober 2008
Vektordarstellung von
Drehbewegungen
y
R cos φ
~
r = R sin φ
z0
− sin φ
dφ
~v = R
cos φ
dt
0
dφ
= ω ; |~v | = ωR
dt
v
r
a zentr
φ
x
Beschleunigung:
~a =
d~v
=
dt
−
sin
φ
d2 φ
R 2
cos φ +
dt
0
{z
}
|
(anti)parallel zu ~v ,
d2 φ/dt2 =
Winkelbeschleunigung
R
|
dφ
dt
2
− cos φ
− sin φ
0
{z
}
Zentripetalbeschleunigung,
zeigt zum Drehzentrum
= ~azentr ; |~azentr | = ω 2 R
Beachte: ~v · ~
r = ~v · ~azentr = 0 ⇔ ~v ⊥ ~
r, ~v ⊥ ~azentr
Winkelgeschwindigkeit als Vektor ω
~:
Betrag =
dφ
;
dt
Richtung = Richtung der Drehachse
Rechte-Hand-Regel:
Finger entsprechend Drehsinn ⇒ Daumen in ω
~ -Richtung
⇒ ~v = ω
~ ×~
r
2.1 Kinematik
(wenn Drehachse durch Koordinatenursprung)
29. Oktober 2008
Längen- und Zeitmessung
Laufzeitmessung:
Längenmessmethoden
• Laufzeitmessung
Quelle
Detektor
Reflektor
L
Signalgeschw. c bekannt
L = ct
2
• Triangulation
• Maßstäbe
Metermaß, Schublehre, . . .
• Mikroskop
max. Genauigkeit etwa eine
Wellenlänge λ ≈ 0.5 µm
• Interferometrie
Triangulation:
α
B
Bruchteile von λ
• Elektronenmikroskop
β
Elektronenstrahl-Optik bis
10−10 m → einzelne Atome
• Rastertunnelmikroskop
L
sin α
L = B sin(α+β)
Oberflächenuntersuchungen,
bis ca. 10−10 m
Zeitmessmethoden
• Zählen periodischer Vorgänge
Mechanische oder elektrische Schwingungen,
Umlauf der Erde um die Sonne, . . .
von ∼ µs bis Jahre
• Oszilloskop
Steuerung von Elektronenstrahl mit Spannungssignalen,
Sichtbarmachung von zeitlichen Abläufen bis ca. 1 ns
• Radiometrische Methoden
nützen radiaoaktives Zerfallsgesetz N (t) = N0 exp(−t/τ ),
z.B. C14-Methode bis ca. 40000 a
2.1 Kinematik
29. Oktober 2008
Kraft und Masse
Kraft hat Betrag (Stärke) und Richtung
~
⇒ Darstellung durch Vektor F
• Gewichtskraft:
Im Schwerefeld der Erde wirkt auf Körper mit
Masse m eine Kraft
~ =F
~Gew = m~g
G
Masse = Eigenschaft des Körpers, [m] = kg
~ = Gewichtskraft, [F ] = kg m s−2 = N(ewton)
G
• Federkraft:
Spiralfeder erzeugt bei Auslenkung um Strecke ~
x
Rückstellkraft
~ = −D~
F
x,
D = Federkonstante
(Hook’sches Gesetz,
gilt für alle elastischen Verformungen)
|F|
D groß
D klein
2.2 Bewegungsgleichungen. . .
x
29. Oktober 2008
Reibungskräfte
m
Fzug
FN =mg=G
Reibung ist eine der
Bewegung entgegenwirkende
Kraft, die entsteht, wenn
zwei sich berührende Körper
sich gegeneinander bewegen.
Haftreibung
~zug = F
~H ist die Kraft, die benötigt wird, um die Körper
F
gegeneinander in Bewegung zu versetzen.
~ ~ FH = µH F
N
µH = Haftreibungskoeffizient ∼ 0.5 . . . 1.2
(µH hängt von Material und Oberflächenbeschaffenheit
ab, aber nicht von der Größe der reibenden Oberflächen)
Gleitreibung
~zug = F
~G ist die Kraft, die benötigt wird, um die Körper
F
mit konstanter Relativgeschwindigkeit zu bewegen.
~ ~ FG = µG F
N
µG = Gleitreibungskoeffizient ∼ 0.2 . . . 1.0 < µH
(µG hängt von Material, Oberflächenbeschaffenheit und
Geschwindigkeit ab)
Rollreibung (→ 2.3)
2.2 Bewegungsgleichungen. . .
05. November 2008
Kraftfelder
Definition:
Die Kraft, die ein Körper auf einen anderen ausübt,
lässt sich für jeden Punkt im Raum angeben:
~ =F
~ (~
F
r ) = Kraftfeld
(unabhängig davon, ob sich am Punkt ~
r ein Körper
befindet, auf den die Kraft tatsächlich wirkt).
Beispiel: Schwerefeld der Erde
Die Schwerkraft auf einen Körper (Masse m) ist eine
Folge der Gravitationswechselwirkung zwischen
der Erde (Masse ME ) und diesem Körper.
r
mME ~
~ (~
F
r ) = −G
r2 |~
r|
~
r = Ortsvektor von Erdmittelpunkt zu m
~
r/|~
r | = Einheitsvektor in ~
r-Richtung
2
−11 N m
G = Gravitationskonstante = 6.67 · 10
kg2
m
r
Erde, ME
2.2 Bewegungsgleichungen. . .
F
Erdoberfläche:
~ (|~
|F
r | = RE )| = mg
GME
=
m
2
RE
GME
⇒g =
2
RE
⇒ME = 6.0 · 1024 kg
(mit RE = 6.4 · 106 m)
05. November 2008
Das Gravitationsgesetz
Körper mit Masse ziehen sich an:
m1m2 ~
r12
~
F12 = −G
|~
r12|2 |~
r12
m2
F 12
r
Bei ausgedehnten Körpern wirkt die Kraft,
als wäre die Masse jeweils in einem Punkt
(dem sog. Schwerpunkt) vereinigt.
Bei homogenen Kugeln ist
der Schwerpunkt der Mittelpunkt.
12
m1
Messung der Gravitationskonstante:
Gravitationswaage: Gravitations-Anziehung wird durch
Torsionskraft eines Drahtes kompensiert
~G| = 2G
2|F
m1m2
Tφ
=
R2
d
• T = Winkelrichtgröße
• φ = Verdrillung
des Drahtes
Winkeländerung ∆φ
bei Umlegen der
schweren Kugeln:
R2 T ∆φ
G=
4m1 m2 d
2.2 Bewegungsgleichungen. . .
Laser
M
FG
Draht
mit Spiegel
m
m
FG
d
R
M
05. November 2008
Newtonsche Gesetze 1 und 2
Definition:
Impuls = p
~ = m~v
[p] = kg m s−1
Das 1. Newtonsche Gesetz:
Ein Körper, auf den keine Kraft wirkt, verharrt
im Zustand der Ruhe oder der gleichförmigen
Bewegung:
~ =0⇔p
F
~ = const.
Das 2. Newtonsche Gesetz:
Die zeitliche Impulsänderung eines Körpers mit
Masse m wird durch die auf ihn wirkende Kraft
verursacht und ist gegeben durch:
d~
p m=const.
d~v
~
F =
=
m
= m~a
dt
dt
Achtung:
Diese Gesetze gelten nur, wenn das
Bezugssystem unbeschleunigt ist
(d.h. sich mit gleichbleibender
Geschwindigkeit bewegt)
→ Inertialsystem
2.2 Bewegungsgleichungen. . .
05. November 2008
Inertial- und andere Systeme
Scheinkräfte
Betrachte zwei Koordinatensysteme S und S ′:
• S ist Inertialsystem
• S ′ ist beschleunigt
2. Newtonsche Gesetz in S
(m = const.):
¨
′
~ + ~¨
~ = m~
r
F
r¨ = m R
¨
~ − mR
~
⇒ m~r = F
¨′
Beobachter in S ′ erfährt
¨.
~
Scheinkraft −mR
Beispiel: Beobachter in
frei fallendem Fahrstuhl
ist schwerelos
r’
S’
r
R
S
Schwere Masse = träge Masse
• schwere Masse: erzeugt Schwerkraft
• träge Masse: widersetzt sich Beschleunigung
Diese Gleichheit ist nicht selbstverständlich!
Ausgangspunkt für Einsteins allg. Relativitätstheorie:
Beobachter kann Schwerkraft (schwere Masse)
und Beschleunigung (träge Masse) nicht unterscheiden!
2.2 Bewegungsgleichungen. . .
05. November 2008
3. Newtonsches Gestz,
Kraftstoß, Impulserhaltung
Das 3. Newtonsche Gesetz:
Wechselwirken zwei Körper miteinander,
aber nicht mit anderen Körpern, so üben sie
entgegengesetzt gleiche Kräfte aufeinander
aus:
~1 = −F
~2
F
Der Kraftstoß:
Eine über endliche Zeit (von t1 bis t2) einwirkende Kraft
(Kraftstoß) erzeugt eine Impulsänderung:
Zt2
~ (t)dt
F
∆~
p=
(∗)
t1
Impulserhaltung:
Aus (∗) und dem 3. Newtonschen Gesetz folgt für die
Impulsänderung der beiden wechselwirkenden Körper
∆~
p1 = −∆~
p2 ⇒ (~
p1 + p
~2 )|vorher = (~
p1 + p
~2)|nachher
In einem abgeschlossenen System
(keine äußeren Kräfte)
ist die Summe aller Impulse konstant!
2.2 Bewegungsgleichungen. . .
05. November 2008
Die Rakete
Antrieb durch Ausstoß von Treibgas oder Flüssigkeit
wegen Impulserhaltung.
Annahmen: konstante Ausstoßrate dm
=µ
dt
konstante Ausstoßgeschwindigkeit v0
z
p=(m−dm)(v+dv)
p=mv
p=dm(v−vo )
t
t+dt
Impulsänderung in infinitesimalem Zeitintervall dt
p
~ (t) = m~v
p
~ (t + dt) = (m − dm)(~v + d~v ) + dm(~v − ~v0 )
= m~v + m · d~v − dm · ~v0 − |dm{z· d~v}
vernachl.
p
~ (t + dt) − p
~ (t)
d~v
d~
p
!
~ext
=
=m
− µ~v0 = F
dt
dt
dt
=~
0 und ~v (t=0) = ~
0:
⇒
~ext
Für F
µ
µ
d~v
=
~v0 =
~v0
dt
m(t)
m0 − µt
Zt
m0
µ~v0 dt
= [−~v0 ln(m0 − µt)]t0 = ~v0 ln
⇒ ~v (t)=
m0 − µt
m(t)
0
2.2 Bewegungsgleichungen. . .
05. November 2008
Arbeit und Wegintegrale
Arbeit = W =
R
~d
F
[W ] = N m = kg m2 s−2
C
FN
∆s N
Z
~ d~s = lim
F
N
X
|∆~s |→0
N →∞ i=1
C
~i · ∆~si
F
Die ∆~si bilden
einen Polygonzug
entlang dem Weg C.
C
F
1
∆s 1
Beispiele:
Arbeit gegen Schwerefeld beim Heben einer Masse m:
0
0
~ = 0 = −G
~
d~s = 0 ; F
dz
mg
Zz2
Z
~ d~s = mg dz = mg (z2 − z1)
⇒W = F
| {z }
C
z1
=h
Arbeit gegen Federkraft:
dx
Dx
~ = 0 = −F
~Rückstell
d~s = 0 ; F
0
0
Zx2
Z
~ d~s = Dx dx = D x2 − x2
⇒W = F
1
2
2
C
2.2 Bewegungsgleichungen. . .
x1
05. November 2008
Arbeit in Kraftfeldern
~ (~
In einem Kraftfeld F
r ) ist
Z
~ (~
F
r ) d~
r
C
die vom Feld bei Bewegung eines Körprs
entlang dem Weg C geleistete Arbeit.
Achtung: Vorzeichenwechsel bzgl. vorherigen Beispielen
Konservative Kraftfelder
~ (~
Ein Kraftfeld F
r ), in dem die Arbeit entlang
geschlossener Wege verschwindet, heißt konservativ.
⇒
Für Weg C(~
r1 → ~
r2 )
(von Anfangspunkt ~
r1 bis Endpunkt ~
r2 )
r1 und ~
r2 ab, aber nicht von C.
hängt W nur von ~
I
C2
r2
C
~ d~
F
r=
Z
~ d~
F
r +
C1 (~
r1 →~
r2 )
Z
~ d~
F
r
C2 (~
r →~
r )
| 2 {zR 1 }
~ d~
=−
F
r
C2 (~r1 →~r2 )
⇒
C1
Z
~ d~
F
r=
C1 (~
r1 →~
r2 )
F
r1
2.2 Bewegungsgleichungen. . .
Z
~ d~
F
r
C2 (~
r1 →~
r2 )
~ = const.,
z.B. F
alle kugelsymmetrischen
Zentralfelder
12. November 2008
Potentielle Energie
In konservativen Kraftfeldern:
Z
~ d~
W =
F
r
C1 (~
r1 →~
r2 )
= Ep(~
r1) − Ep(~
r2) = − [Ep(~
r2) − Ep(~
r1)]
• Ep = potentielle Energie; [Ep] = [W ] = N m
• Beachte Vorzeichen: Ep nimmt zu,
wenn Bewegung gegen das Kraftfeld gerichtet ist
• Wahl des Nullpunkts von Ep willkürlich
bzw. durch Konvention festgelegt.
Potentielle Energie einer Masse m im Erd-Schwerefeld:
Ep (z) = mgz (Wahl des z-Ursprungs willkürlich)
Potentielle Energie bei Dehnen einer Feder:
1
Dx2 (x-Ursprung: Gleichgewichtslage)
2
Potentielle Energie im Erd-Gravitationsfeld:
Ep (x) =
r
~
r
~ = −G mME ~
; F
|~
r|
|~
r |2 |~
r|
r2
Zr2
Z
|~
r |=r
dr
GmM
E
~ d~
r = −GmME
⇒W = F
=
r2
r
r1
r1
C
1
1
!
= Ep (r1) − Ep (r2)
−
= GmME
r2 r1
GmME
⇒ Ep (r)= −
(Nullpunkt so, dass Ep (∞) = 0)
r
d~
r = dr
2.2 Bewegungsgleichungen. . .
12. November 2008
Der Energiesatz
Herleitung aus 2. Newtonschen Gesetz:
p
~ = d~
F
dt
⇒
Zt2
t1
m=const.
=
~ ~v dt = m
F
|{z}
d~
r =~v dt
⇒ Ep (t1) − Ep (t2) =
Zt2
t1
m
d~v
dt
d~v
~v dt
dt
1
1
mv(t2 )2 − mv(t1 )2
2
2
1
mv 2 = const. = Etot
2
Definition: kinetische Energie = 12 mv 2 = Ekin
⇒ Ep +
t=0, v=0
Schiefe Ebene:
p
1
2
mgh = mv ⇒ v = 2gh
2
h
t=t1 , v=v1
E
Feder:
Etot = Ep + Ekin
1
1
= Dx2 + mv 2
2
2
Wegen Ekin > 0 ist nur der
Bereich mit Etot ≥ Ep
erlaubt.
E p= Dx
2
erlaubter Bereich
E tot
(→ Schwingungen,
Abschnitt 2.4)
− x0
2.2 Bewegungsgleichungen. . .
x0
x
12. November 2008
2
Berechnung der Kraft
aus der potentiellen Energie
In konservativen Kraftfeldern:
⇒ Potentielle Energie Ep ergibt sich
durch Integration aus Kraftfeld
⇒ Umkehrung? Ja:
∂Ep (~
r )/∂x
~
~ (~
~ p (~
F
r ) = − ∂Ep (~
r ) = −∇E
r)
r )/∂y = −gradE
p (~
∂Ep (~
r )/∂z
(ohne mathematischen Beweis!)
Beispiel: Gravitationsfeld der Erde
mME
Ep (~
r ) = Ep(r) = −G
r
q
mit r = x2 + y 2 + z 2
⇒ Anwendung der Kettenregel:
∂ 1
∂r
∂Ep (r)
= −GmME
∂x
∂r r
∂x
1
x
= −GmME − 2
r
r
⇒ Genauso für y und z; insgesamt:
x/r
r
~G = −G mME y/r = −G mME ~
F
r2
r2 r
z/r
2.2 Bewegungsgleichungen. . .
12. November 2008
Leistung
Definition:
dW
Leistung = P =
;
dt
[P ] = N m/ s = J/ s = W(att)
~ und ~v :
Zusammenhang mit F
Betrachte Wegintegral über Kraft entlang Weg C,
der durch ~
r=~
r (t) gegeben ist:
Z
d
~ d~s
F
P =
dt
C
d
=
dt
Zt
t0
r ′
d
~ (t′ ) d~
F
dt
=
dt′
dt
Zt
~ (t′) ~v (t′ ) dt′
F
t0
~ · ~v
⇒P =F
Beispiel:
Maximale Beschleunigung a eines Autos mit
50 kW Motorleistung und Masse m = 103 kg
bei Geschwindigkeit v = 20 m
?
s
~ k ~v ⇒ P = F v = mav
F
P
5 · 104 kg m2 s
m
⇒a=
=
=
2.5
mv
103 · 20 s3 kg m
s2
2.2 Bewegungsgleichungen. . .
12. November 2008
Kreisbahn um die Erde,
Fluchtgeschwindigkeit
Kreisbahn um die Erde:
Gravitations-Kraftfeld zeigt radial zum Erdmittelpunkt
⇒ Kreisbewegung mit konstantem ω möglich
(Umlauf von Masse m in Radius R um Erdmittelpunkt)
~G| = m|~azentr |
⇒ 2. Newtonsches Gesetz: |F
v2
mME
2
= mω R = m
⇒G
R2
R
GME
⇒R=
v2
⇒ Achtung: Andere Bahnformen (Ellipsen) möglich,
siehe 2.3
Fluchtgeschwindigkeit:
Energiebilanz im Erd-Gravitationsfeld
1
mME
+ mv 2 = const.
r
2
ME m
< 0: Bewegung beschränkt auf r ≤ G
|Etot|
≥ 0: Bewegung nach r → ∞ möglich
Etot = Ep + Ekin = −G
⇒ Etot
⇒ Etot
⇒ Grenzfall: Etot = 0
1
ME m
= mv02
REs
2
p
2GME
v0 =
= 2gRE
RE
= 11.2 km/ s
E
E tot >0
G
= Fluchtgeschw.
2.2 Bewegungsgleichungen. . .
0
RE
r
E tot <0
Ep =
GM Em
r
12. November 2008
Stoßprozesse
Problemstellung:
Wechselwirkung zweier Körper miteinander,
aber nicht mit anderen Objekten
⇒ Körper lenken sich gegenseitig ab
⇒ Anfangs- und Endzustand: Abstand groß,
keine (bzw. vernachlässigbare) Wechselwirkung
→ Etot = Ekin
⇒ 3. Newtonsches Gesetz → Impulserhaltung
p’1
p1
Impulssumme:
p
~tot = p
~1 + p
~2
~ ′2
=p
~ ′1 + p
p2
Schwerpunktsystem:
p
~tot = ~
0
p’2
Elastisch oder inelastisch ?
′
⇒ Elastisch: Ekin = Ekin
– in konservativen Kraftfeldern
– wenn sich die Körper nicht berühren
und unverändert bleiben
′
>0
⇒ Inelastisch: Q = Ekin − Ekin
– Kinetische Energie wird umgewandelt
– Verformung, Schall, Wärme, . . .
2.2 Bewegungsgleichungen. . .
12. November 2008
Zentrifugalkraft
Definition:
• Körper, der in rotierendem Bezugssystem ruht,
erfährt Beschleunigung aZ = ρω 2 in Richtung zur
Drehachse (ρ = Abstand Körper–Drehachse)
• Körper übt Zentrifugalkraft mit Betrag
m aZ radial nach außen aus
Vektorschreibweise:
~Z = m ~aZ = m ω
F
~ × (~
r×ω
~)
Rotierendes Wasserglas:
• Wasseroberfläche stelt sich senkrecht zur
insgesamt wirkenden Kraft ein
~Z ! dzo(r)
|F
=
tan α =
~
dr
FG
ω2r
⇒ tan α =
g
⇒zo(r) =
Zr 2 ′
ω r
dr′ =
zo(0) +
g
o
ω2r2
zo(0) +
2g
2.2 Bewegungsgleichungen. . .
z
zo(r)
ω
α
α
FZ
FG Ftot
r
12. November 2008
Tiefdruckgebiete
2.3 Drehungen. . .
19. November 2008
Corioliskraft
Beobachter außen
Beobachter auf Scheibe
∆s
v
2R
ω
ω
Berechnung der Coriolis-Beschleunigung:
• Beobachter auf Scheibe sieht gekrümmte Bahn
wenn Bewegung in Inertialsystem geradlinig ist
(Geschwindigkeit ~v )
• Beobachter schließt auf Existenz einer Kraft,
die diese Beschleunigung verursacht
• Er sieht Ablenkung ∆s in Zeitintervall ∆t:
∆t =
R
v
⇒
R = v∆t
1
ac ∆t2
2
⇒ ac = Coriolis-Beschleunigung = 2vω
!
∆s = Rω∆t = ωv∆t2 =
Coriolis-Kraft:
ω
ac
v
2.3 Drehungen. . .
~c = m~ac
F
= 2m(~v × ω
~)
19. November 2008
Drehimpuls
Definition:
~ =~
Drehimpuls = L
r×p
~
[L] = kg m2/ s = J s = [~]
z
L=r x p
p=mv
y
r
x
Eigenschaften des Drehimpulses:
•
•
•
~ steht senkrecht auf ~
L
r und ~v
~ hängt von Wahl des Koordinatenursprungs ab!
L
Für Drehung mit konstanter Winkelgeschwindigkeit ω
~
und ~
r⊥ω
~ ist |~v | = r|~
ω | = rω und damit
~ | = m v r = m ω r2
|L
2.3 Drehungen. . .
(~
r⊥ω
~)
19. November 2008
Drehmoment und Drehimpuls
Zeitliche Änderung des Drehimpulses:
~
dL
d~
r
d~
p
=
×~
p + ~
r×
dt
dt
dt
|{z}
|{z}
~
=F
| =~v{z
}
=~
0
~ =D
~ = Drehmoment
r×F
=~
[D] = N m = J
Wenn kein Drehmoment angreift,
bleibt der Drehimpuls zeitlich
konstant (d.h. erhalten).
Beispiele:
~ ist Erhaltungsgröße bei Bewegung in Zentralfeldern
• L
~ =~
(bzgl. Zentrum des Kraftfeldes, da ~
r×F
0).
~ ist Erhaltungsgröße in abgeschlossenen Systemen
• L
(d.h. ohne äußere Krafteinwirkung). Der Beitrag
zum Gesamtdrehmoment von jedem Paar (1,2)
von Objekten ist Null:
~ 12 = ~
~12 + ~
~21 = (~
~12 = ~
D
r1 × F
r2 × |{z}
F
r1 − ~
r2 ) × F
0
~12
=−F
da der Ortsvektor ~
r1 − ~
r2 von (2) nach (1)
~12 ist (3.N.G.)
(anti)parallel zu F
2.3 Drehungen. . .
19. November 2008
Drehmoment im Erdschwerefeld
Schwerpunkt:
• Betrachte starren Körper als zusammengesetzt aus
N kleinen Massenelementen ∆mi mit
Ortsvektoren ~
ri bzgl. Aufhängungspunkt
• Berechnung des Drehmoments:
~ =
D
=
N
X
~
ri × (∆mi~g )
i=1
N
X
i=1
∆mi~
ri
!
× ~g
= Mtot · ~
rS × ~g
wobei ~
rS der Schwerpunkt ist:
PN
PN
∆m
~
r
ri
i i
i=1 ∆mi~
Schwerpunkt = ~
rS = Pi=1
=
N
Mtot
i=1 ∆mi
⇒ Schwerkraft wirkt, als wäre Masse des Körpers
in Schwerpunkt konzentriert
⇒ Körper ist in jeder Orientierung im Gleichgewicht,
wenn er im Schwerpunkt aufgehängt ist
⇒ Wenn nicht, ist im Gleichgewichtszustand der
Schwerpunkt unterhalb des Aufhängepunkts.
Aufhängepunkt=Schwerpunkt
m1
m2
Balkenwaage:
Gleichgewicht für
~ = 0 ⇒ d1 m1 = d2 m2
D
d1
d2
2.3 Drehungen. . .
19. November 2008
Kraftwirkung auf starre Körper
F
F
A
A
F1
r
r
F2
SP
SP
Kraft auf starren Körper:
~
• Für ausgedehnte Körper muss außer der Kraft F
auch der Angriffspunkt A beachtet werden
~
• Wenn A nicht der Schwerpunkt SP ist, kann man F
durch ein in SP angreifendes Kräftepaar
~1 = F
~ und F
~2 = −F
~
F
~1 + F
~2 = ~
ergänzen (wegen F
0 ändert das nichts)
~1 führt zu einer Beschleunigung des Körpers:
• F
p
~1 = F
~ = d~
F
dt
~ und F
~2 erzeugen ein Drehmoment bzgl.
• F
des Schwerpunkts (aber keine Beschleunigung):
~
dL
~
~
D=~
r×F =
dt
Im allgemeinen bewirkt eine Kraft auf einen
starren Körper sowohl dessen Beschleunigung
wie auch eine Änderung seines Drehimpulses.
2.3 Drehungen. . .
19. November 2008
Grundlagen Vektormultiplikation Drehbewegungen
Vektorrechnung in der Physik und
Drehbewegungen
Simon Grüner
26. November 2008
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Vektoren
Vektoren sind bestimmt durch
a) Betrag und
b) Richtung
Beispiel
Darstellung
in 3 Dimensionen:
x
~k = y
z
Vektor in kartesischen Koordinaten
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Addition von Vektoren
Addition von Vektoren
wird komponentenweiße durchgeführt
Berechnung
Beispiel
k1
~k1 + ~k2
k res
k2
Simon Grüner
x1
x2
= y1 + y2
z1
z2
x1 + x2
= y1 + y2 = ~kres
z1 + z2
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Beispiel
Beispiel: Flug mit Gegenwind
siehe Übungen, Aufgabe 7
Beispiel: Bootsfahrt quer zur Strömung
Berechnung
sin(α) =
|~vF |
|~vB |
und
Simon Grüner
vg = |~vg | =
p
|~vB |2 − |~vF |2
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Komponentenzerlegung
Komponentenzerlegung von Vektoren
vx
vx
0
0
~v = vy = 0 + vy + 0 = ~vx + ~vy + ~vz
vz
0
0
vz
Beispiel in 2 Dimensionen
y
Zerlegung
y
vy
v
v
vx
x
x
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Beispiel
Beispiel: schiefer Wurf im Schwerefeld
vy
v
a
Startbedingungen
g
0
vx
Beschleunigungen
Kräfte
vx,0 = |~v0 | · cos(α)
Fx = 0
ax = 0
vy,0 = |~v0 | · sin(α)
Fy = −m · g
ay = −g
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Beispiel: schiefer Wurf im Schwerefeld
Startbedingungen
Beschleunigungen
Kräfte
vx,0 = |~v0 | · cos(α)
Fx = 0
ax = 0
vy,0 = |~v0 | · sin(α)
Fy = −m · g
ay = −g
Geschwindigkeits-Zeit-Gesetze
Weg-Zeit-Gesetze
vx (t) = vx,0
sx (t) = vx,0 · t
vy (t) = vy,0 − g · t
sy (t) = vy,0 · t − 0, 5 · g · t2
Parameter-Darstellung: sy (sx )
vy,0
g
sy (sx ) =
· sx − 0, 5 · 2 · s2x
vx,0
vx,0
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Beispiel
Beispiel: Abrutschen auf der schiefen Ebene
FH
FN
FG a
Berechnung
|F~H | = |F~G | · sin α
|F~N | = |F~G | · cos α
|F~R | = µ · |F~N |
Abrutschbedingung: |F~H | > |F~R |
|F~G | · sin α = µ · |F~G | · cos α
Simon Grüner
⇔
tan α = µ
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Skalarmultiplikation
Multiplikation mit einem Skalar s
vx
s · vx
s · ~v = s · vy = s · vy
vz
s · vz
Darstellung
k
2k
-1 k
Resultat
a) Betrag (also die Pfeillänge) wird
um den Faktor s vergrößert
b) Orientierung bleibt unverändert
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Vektormultiplikation
Multiplikation von zwei Vektoren
Arten von Vektormultiplikation
a) Skalarprodukt
b) Kreuzprodukt
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Skalarprodukt
Berechnung
x1
x2
~a1 · ~a2 = y1 · y2 = x1 · x2 + y1 · y2 + z1 · z2
z1
z2
grafische Bedeutung
insbesondere
~a1 · ~a2 = |~a1 | · |~a2 | · cos α
~a1 ⊥ ~a2 ⇒ ~a1 · ~a2 = 0
~a1 k ~a2 ⇒ ~a1 · ~a2 = |~a1 | · |~a2 |
~a1 = ~a2 ⇒ ~a1 · ~a1 = |~a1 |2
a1
a
a2
Betrag eines Vektors
p
√
|~a| = ~a · ~a = x2 + y 2 + z 2
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Beispiel
Beispiel: mechanische Arbeit W
W = F~ · ~s = |F~ | · |~s| · cos α
anschaulich
F
a
s
Projektion: nur die x-Komponente verrichtet Arbeit
Fx
x
W = 0 · 0 = Fx · x
Fz
0
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Beispiel
Beispiel: Anheben einer Masse m um die Strecke z
0
0
0
0 =m·g·z
W =
·
m·g
z
Aber: Eine Masse m die Strecke x tragen
0
x
W = 0 · 0 =0
m·g
0
Oder: einfach nur festhalten
0
0
W = 0 · 0 =0
m·g
0
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
mechanische Arbeit verallgemeinert
im Allgemeinen kann ...
die Kraft eine Funktion der Ortsvariablen x, y und z sein! Dann ist
Z s2
W =
F~ · d~s
s1
Beispiel: Dehnen einer Feder in x-Richtung
D·x
dx
F~ = 0
d~s = 0
0
0
dazu notwendige Arbeit
Z x2
1
W =
D x dx = D (x22 − x21 )
2
x1
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Kreuzprodukt
Berechnung
x1
x2
y1 z2 − z1 y2
~a1 × ~a2 = y1 × y2 = z1 x2 − x1 z2 = ~a3
z1
z2
x1 y2 − y1 x2
grafische Bedeutung
Rechte-Hand-Regel
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Kreuzprodukt
Berechnung
x1
x2
y1 z2 − z1 y2
~a1 × ~a2 = y1 × y2 = z1 x2 − x1 z2 = ~a3
z1
z2
x1 y2 − y1 x2
Also: Richtung
~a3 ⊥~a1
und
~a3 ⊥~a2
Und: Betrag
|~a3 | = |~a1 | · |~a2 | · sin α
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Beispiel
Beispiel: Corioliskraft
F~c = m 2 (~v × ω
~)
| {z }
|~ac | = 2 |~v | |~
ω| = 2 v ω
für ~v ⊥ ω
~
~ac
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Beispiel
Beispiel: Zentripetalkraft
F~z = −m ω
~ × (~r × ω
~)
|
{z
}
|~az | = r ω 2 =
v2
r
für ~r ⊥ ω
~
~az
r
w
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Drehbewegungen
Drehbewegungen
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Drehimpuls
Definition
~ = ~r × p~ = m ~r × ~v
L
~ = mvr
|L|
für ~r ⊥ ~v
v
L
r
Drehimpulserhaltung
~ wirkt, dann bleibt der
Wenn kein resultierendes Drehmoment D
~
Drehimpuls L zeitlich konstant, also erhalten!
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Drehimpulserhaltung und Drehmoment
Beweis
d~r
~
dL
d~
p
~
= ~r × F~ = D
=
×~
p + ~r ×
dt
dt
dt
|{z}
|{z}
~v
~
F
Achtung!
Es ist der Drehimpulsvektor erhalten – also sowohl Betrag als auch
Richtung des Drehimpulses sind zeitlich konstant, wenn kein
Drehmoment wirkt!
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Drehimpulserhaltung
~ = L = mvr
Erhaltung des Betrages: |L|
~ = ~r × p~
Erhaltung der Richtung: L
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Balkenwaage
Prinzip der Balkenwaage
Austarieren
⇒ System ist in Ruhe
⇒ es wirkt kein resultierendes Drehmoment (Dges = 0)
d1
d2
Berechnung: einfach, da d~ ⊥ F~
~ 1 | = D1 = d1 · m1 · g
|D
~ 2 | = D2 = −d2 · m2 · g
|D
m1 g
m2 g
!
Dges = D1 + D2 = g · (d1 · m1 − d2 · m2 ) = 0
Also: d1 · m1 = d2 · m2
⇒ Hebelgesetz
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Schwerpunkt
Konzept ausgedehnter, starrer Körper
Gesamtdrehmoment auf Körper der Masse mtot im Erdschwerefeld
ist Summe aus den Drehmomenten auf kleine Masseelemente ∆mi
!
N
N
X
X
~ =
D
~ri × (∆mi ~g ) =
∆mi ~ri × ~g = mtot ~rS × ~g
i=1
i=1
Schwerpunkt ~rS
PN
~rS =
∆mi ~ri
Pi=1
N
i=1 ∆mi
PN
=
ri
i=1 ∆mi ~
mtot
Resultat
Die Schwerkraft wirkt, als wäre die gesamte Masse des Körpers im
Schwerpunkt konzentriert!
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Schwerpunkt
Beispiel: Gleichgewichtslage des physikalischen Pendels ...
... zum experimentellen Auffinden des Schwerpunktes!
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Schwerpunkt
Beispiel: im Schwerpunkt gelagert ...
... wirkt kein resultierendes Drehmoment!
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Schwerpunkt
Beispiel: Umkippen, wenn ...
... der Schwerpunkt über die Auflagefläche gedreht wird!
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Schwerpunkt
Beispiel: Umkippen ohne ESP!
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Kraftwirkung auf starre Körper
Eine Kraft F~ bewirkt im allgemeinen ...
... sowohl dessen translatorische Beschleunigung
d~
p
F~ =
dt
... als auch eine Änderung seines Drehimpulses
~
~ = ~r × F~ = dL
D
dt
Für letztere ist der Angriffspunkt der Kraft am Körper
entscheident!
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Kraftwirkung auf starre Körper
Beispiel: Translation und Rotation
SP
r
A
Simon Grüner
F
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Kraftwirkung auf starre Körper
Beispiel: nur Translation
SP
Simon Grüner
r
A
F
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Rotationsenergie Erot
Frage: welche Energie steckt in der Rotation eines starren Körpers?
Wieder betrachen wir den Körper zusammengesetzt aus vielen
kleinen Massen ∆mi am Ort ~ri mit der Geschwindigkeit ~vi . Dann
ist
~vi = ω
~ × ~ri
⇒
vi2 = ω 2 ρ2i
w
Dmi
ri
0
Simon Grüner
ri
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Rotationsenergie Erot
Frage: welche Energie steckt in der Rotation eines starren Körpers?
Wieder betrachen wir den Körper zusammengesetzt aus vielen
kleinen Massen ∆mi am Ort ~ri mit der Geschwindigkeit ~vi . Wegen
~vi = ω
~ × ~ri
vi2 = ω 2 ρ2i
⇒
ist die kinetische Energie dann gegeben durch
N
Ekin =
N
1X
1
1X
∆mi vi2 =
∆mi ρ2i ω 2 = I ω 2 = Erot
2
2
2
i=1
|i=1 {z }
I
mit dem Trägheitsmoment I =
Simon Grüner
PN
2
i=1 ∆mi ρi .
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Trägheitsmoment I
Bedeutung
Das Trägheitsmoment I ist die physikalische Größe, die die
Trägheit eines starren Körpers gegenüber einer Änderung seiner
Rotationsbewegung angibt!
Nicht vergessen!
In
I=
N
X
∆mi ρi 2
i=1
bezeichnet ρi den senkrechten Abstand des Masseelementes ∆mi
zur betrachteten Rotationsachse. Deshalb hängt I auch
entscheident von der Drehachse ab!
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Trägheitsmoment I
Beispiel: Ändern des Trägheitsmomentes und Energieerhaltung
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Volumenintegrale
Summation → Integration
∆mi
N →∞,∆mi →0
−→
dm = %(~r) dV
mit der lokalen Dichte %(~r). Die diskrete Summation geht dann
über in eine kontinuierliche Integration
N
X
∆mi
N →∞,∆mi →0
Z
−→
%(~r) dV
V
i=1
Trägheitsmoment I
Z
I=
ρ2 %(~r) dV
V
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Volumenintegrale
Kartesische Koordinaten
Z
Z
Z
Z
dV = dx dy dz
V
Zylinderkoordinaten
Z
Z
dV =
Z
ρ dφ
Z
dρ
dz
V
wobei
x = ρ cos(φ)
y = ρ sin(φ)
z = z
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Volumenintegrale und Trägheitsmomente
Beispiel: homogener Zylinder, Masse M , Radius R, Höhe H
Z
I =
Z
2
ρ % dV = %
V
R
3
Z
ρ dρ
0
2π
Z
H
dφ
0
dz
0
1 4 R
H
= %· ρ
· [φ]2π
0 · [z]0
4
0
1
2
=
% π R H R2
2 | {z }
M
=
1
M R2
2
Beispiel: Zylindermantel, Masse M , Radius R, Höhe H
trivialerweiße
I = M R2
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Beispiele für Trägheitsmomente
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Trägheitsmoment I
Beispiel: Wettrennen gleicher Massen und Energieerhaltung
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
punktachse, der Vektor ri von der Drehachse zum Massenelement ∆mi und der Vektor si von der Schwerpunktachse
zum Massenelement. Es gilt also
i
Grundlagen Vektormultiplikation Drehbewegungen
Satz von Steiner
r =a+s
i
das Trägheitsmoment des K
se. Im mittleren Summanden
(II),
i
∑ ∆mi ⋅ si = 0 ,
i
da die Vektoren si von der Sc
Bedeutung
Aus (IV) folgt somit der Satz v
JA = M ⋅ a2 + JS
1214-Sel
Dieser Satz wird im Versuch
scheibe verifiziert. Deren Trä
achse mit dem Abstand a z
aus der Schwingungsdauer
Kreisscheibe befestigt wird. E
2
T
JA = D ⋅
2π
D: Winkelrichtgröße der Drilla
Fig. 1
IA =
N
X
∆mi (~a + ~si )2
Schematische Darstellun
Steiner (Parallelachsenth
1
i=1
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Satz von Steiner
Herleitung
IA =
N
X
∆mi (~a + ~si )2
i=1
= a
2
N
X
∆mi +2 ~a
|i=1{z }
M
N
X
∆mi ~si +
|i=1 {z
0
}
N
X
∆mi s2i
|i=1 {z
IS
}
= IS + M a2
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Grundlagen Vektormultiplikation Drehbewegungen
Vergleich: Translation – Rotation
Simon Grüner
Vektorrechnung in der Physik und Drehbewegungen
Rotation starrer Körper
Starrer Körper:
Wird beschrieben als Satz von fest miteinander
verbundenen Massenelementen ∆mi (i = 1, . . . , N )
mit Ortsvektoren ~
ri .
Drehmoment und Trägheitsmoment:
~ =
L
N
X
i=1
∆mi (~
ri × |{z}
~vi )
=~
ω ×~
ri
Bei Drehung um Symmetrieachse (oder i.a. geeignete
Wahl des Koordinatenursprungs auf Drehachse) ist
~ =
L
I=
N
X
N
X
i=1
ω
∆mi ρ2
~ =Iω
~
i
−ρi
∆mi ρ2
i
ρi
∆m i
∆m i’
i=1
= Trägheitsmoment
[I] = kg m2
ri
0
⇒ I hängt von Orientierung
der Drehachse ab
⇒ Symmetrieachse geht
durch Schwerpunkt
ω
2.3 Drehungen. . .
3. Dezember 2008
Translation
Rotation
3. Dezember 2008
Länge x
Drehwinkel φ
Geschwindigkeit v = dx
dt
Winkelgeschwindigkeit ω = dφ
dt
Masse M
Trägheitsmoment I
Impuls p
~ = M~v
~ = I~
ω
Drehimpuls L
~
Kraft F
~ =~
~
r×F
Drehmoment D
~ = d~p
2. Newtonsches G. F
dt
~
~ = dL
D
dt
kinetische Energie
Rotationsenergie
1 M v2
Ekin = 2
2
Erot = 1
Iω
2
Vergleich Drehung - Translation
2.3 Drehungen. . .
Äquivalente Variablen:
Planetenbahnen
Erhaltungssätze:
• Impuls: p
~tot = p
~P + p
~S (P = Planet, S = Sonne)
⇒ Beschreibung im Schwerpunktsystem,
MS
Verwendung der reduzierten Masse µ = MMP P+M
≈ MP
S
~ =~
• Drehimpuls: L
rSP × p
~P (~
rSP zeigt von S zu P)
~
⇒ ebene Bewegung (da p
~P ⊥ L)
• Energie: Etot = Ep + Ekin = −G MrPSPMS + Ekin
Keplersche Gesetze:
(können aus den Erhaltungssätzen hergeleitet werden)
1. Die Planeten bewegen sich auf Ellipsenbahnen
um die Sonne, die in einem der Brennpunkte steht.
2. Die vom Abstandsvektor ~
rSP pro Zeiteinheit
überstrichene Fläche ist konstant:
y
t2
S
A2
A1
=
= const.
∆t1
∆t2
A2
t2 +∆ t2
rSP
t 1 +∆ t1
A1
x
t1
3. Für die Umlaufzeiten TP und die großen Halbachsen
aP aller Planetenbahnen gilt
TP2
a3
P
= const.
2.4 Schwingungen und Wellen. . .
3. Dezember 2008
Ellipsen
y
b
P
r SP
r
S
−a
BP1
0
a
BP2
x
−b
Mathematische Beschreibung
• Charakterisiert durch Halbachsen
a (große Halbachse), b (kleine Halbachse)
• Ellipsengleichung:
• Exzentrität:
• Brennpunkte:
y2
x2
+ 2 =1
a2
b
s
2
b
ǫ= 1−
a
BP1,2 = (±aǫ, 0)
• Konstruktion: Umfang des Dreiecks ∆(BP1BP2 P )
ist konstant für alle P auf Ellipse
2.4 Schwingungen und Wellen. . .
3. Dezember 2008
Die Schwingungsgleichung
Mechanische Schwingungen . . .
sind periodische Bewegungsvorgänge:
~
r (t + T ) = ~
r (t)
(T ist die Schwingungsdauer)
D
0 (Gleichgewicht)
M
x
Beispiel: Federpendel
• Masse M an Feder mit Federkonstante D
im Schwerefeld der Erde
• x = 0 im Gleichgewicht (Schwerkraft = Federkraft)
• Auslenkung aus Gleichgewicht ⇒
Schwingung um x = 0
• 2. Newtonsches Gesetz:
dp
= F ⇒ M ẍ = −Dx
dt
⇒ Schwingungsgleichung (SG):
2.4 Schwingungen und Wellen. . .
ẍ = −
D
x
M
3. Dezember 2008
Harmonische Schwingungen
Lösung der Schwingungsgleichung:
• SG ist Differentialgleichung
• Lösung bei gegebenen Anfangsbedingungen
x(0) = x0 und ẋ(0) = v0 eindeutig.
• Ansatz:
ẋ(t) = Aω cos(ωt + ϕ)
x(t) = A sin(ωt + ϕ) ⇒ ẍ(t) = −Aω 2 sin(ωt + ϕ)
−Aω 2 = −A D (SG)
M
p
ω = D/M = 2π/T = Kreisfrequenz
= x0ω/v0 = Phasenverschiebung
⇒ tan ϕq
A = x2 + (v0 /ω)2 = Amplitude
0
• Energiebilanz:
Ep = Dx2 /2 = D [A sin(ωt + ϕ)]2 /2
Ekin = M ẋ2/2 = M [Aω cos(ωt + ϕ)]2 /2
⇒ Etot = Ep + Ekin = DA2/2 = M (Aω)2/2 = const.
x , v, a
v
Sinusförmige
Schwingungen
heißen
harmonisch.
x
T
0
2T
t
a
Ep ,
Ekin
E tot =const.
t
2.4 Schwingungen und Wellen. . .
3. Dezember 2008
Das mathematische Pendel
Mathematisches
Pendel:
• Masse M an Faden der
Länge l im
Schwerefeld der Erde
• Schwerkraft wirkt
Auslenkung entgegen
• Geometrische Ausdehnung
von M vernachlässigbar
(andernfalls:
“physikalisches Pendel”)
φ
l
M
FII
FN
F=Mg
Gesucht: Winkel φ(t)
• Drehbewegung um Aufhängepunkt (•)
• Beschreibung mit Drehimpuls L und Drehmoment D
L = Iω = M l2φ̇
D = −lFk = −lF sin φ = −M lg sin φ
⇒ −M lg sin φ = M l2φ̈ ⇒ φ̈ = −(g/l) sin φ
• Keine harmonische Schwingung
(φ(t) = A sin(ωt + ϕ) ist keine Lösung)!
• Für φ ≪ 1 gilt sin φ ≈ φ. In dieser Näherung
ist die Schwingung harmonisch:
p
φ(t) = A sin(ωt + ϕ) mit ω = g/l
• Schwingungsfrequenz ist unabhängig von M und von
der Amplitude A
• Messung von ω und l ⇒ Bestimmung von g.
2.4 Schwingungen und Wellen. . .
3. Dezember 2008
Drehschwingungen
• Körper ist um Achse (•) durch
Schwerpunkt drehbar
• Spiralfeder oder verdrillter Draht
erzeugt rückstellendes
Drehmoment D bei Auslenkung
aus Gleichgewichtslage
• Hooksches Gesetz:
τ
φ
D = −τ φ
τ = Winkelrichtgröße
Gleichgewichtslage
Schwingungsgleichung:
dL
= D ⇒ I φ̈ = −τ φ
dt
• Harmonische
Schwingung φ(t) = A sin(ωt + ϕ)
p
mit ω = τ /I
• Schwingungsfrequenz ist unabhängig von A
• Kann zur Messung von Trägheitsmoment I oder
Winkelrichtgröße τ verwendet werden.
2.4 Schwingungen und Wellen. . .
10. Dezember 2008
Gedämpfte Schwingungen
Schwingungen mit Reibung
• In vielen Fällen: Reibungskraft FR = −bẋ mit
konstantem b > 0 (→ Dämpfung)
• Bewegungsgleichung: M ẍ = −Dx − bẋ
• Reibung wirkt Bewegung entgegen
⇒ Schwingung kommt zum Erliegen (Dissipation:
Schwingungenergie wird an Umgebung übertragen)
D
b
• Abkürzungen: ω02 =
; γ=
M
2M
(1) Gedämpfte Schwingung (ω0 > γ)
q
x(t) = Ae−γt cos(ωt + ϕ) mit ω = ω02 − γ 2
x/A
A, ϕ durch Anfangsbedingungen festgelegt
1
Gedämpfte Schwingung
0.75
0.5
A exp(-γ t)
0.25
0
-0.25
A exp(-γ t) cos(ω t)
ω /γ=20
-0.5
-0.75
-1
0
0.5
1
2.4 Schwingungen und Wellen. . .
1.5
2
2.5
3
γt
10. Dezember 2008
Kriechfall, aperiodischer Grenzfall
(2) Kriechfall (ω0 < γ)
x/A
αt + e−αt
e
x(t) = Ae−γt
mit α =
2
(für x(0) = A, ẋ(0) = 0)
1
q
γ 2 − ω02
Kriechfall
0.8
A exp(-γ t)*(exp(-α x)+exp(α x))/2
α / γ=0.9
0.6
0.4
0.2
0
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
γt
(3) Aperiodischer Grenzfall (ω0 = γ)
x(t) = A(1 + γt) e−γt
x/A
(für x(0) = A, ẋ(0) = 0)
1
Aperiodischer Grenzfall
0.8
0.6
A exp(-γ t)(1+γ x)
0.4
0.2
0
0
0.5
1
1.5
2
2.4 Schwingungen und Wellen. . .
2.5
3
3.5
4
4.5
5
γt
10. Dezember 2008
Erzwungene Schwingungen
• Schwingfähiges System
mit Eigenfrequenz
p
ω0 = D/M − γ 2 wird
mit Kraft F0 cos(ωt)
angeregt
• Bewegungsgleichung:
ω
F=F0 cos ω t
D
M ẍ = −Dx − bẋ + F0 cos(ωt)
• Beispiele: Lautsprecher,
Musikinstrumente, Schaukel,. . .
M
Lösung der Bewegungsgleichung:
• Setzt sich additiv aus zwei Anteilen zusammen:
– Gedämpfter Anteil mit Frequenz ω0
– Ungedämpfter Anteil mit Frequenz ω
• Nach “Einschwingvorgang” bleibt nur ungedämpfter
Anteil übrig (γ = b/(2M )):
x(t) = A(ω) cos (ωt + ϕ(ω))
F0/M
A(ω) = q
(ω 2 − ω02 )2 + (2γω)2
tan ϕ(ω) = −
• Spezialfälle:
A
ϕ
ω→0
→ F0/(M ω0)2
→0
2γω
ω02 − ω 2
ω = ω0
= F0/(2γM ω0)
= −90◦
2.4 Schwingungen und Wellen. . .
ω→∞
→ F0/(M ω)2 → 0
→ −180◦
10. Dezember 2008
x/Amax
Resonanzkurve
1
Erzwungene
Schwingung
0.75
0.5
0.25
0
-0.25
γ / ω0=0.1
ω steigt linear mit t
-0.5
-0.75
-1
φ [°]
0
0.5
1
1.5
2
2.5
0
-20
3
ω / ω0
Phasenverschiebung
-40
-60
-80
-100
-120
-140
-160
-180
0
0.5
1
2.4 Schwingungen und Wellen. . .
1.5
2
2.5
3
ω / ω0
10. Dezember 2008
Wellen
Definition und Beispiele
Schwingung breitet sich durch Kopplung an
benachbarte schwingfähige Systeme im Raum aus.
Beispiele:
•
•
•
•
Seilwelle, Pendelkette, Wasserwelle, . . .
Schallwellen
Elektromagnetische Wellen (Licht, Radio, . . . )
Teilchen in der Quantenmechanik
ξ
Ausbreitung mit
Geschwindigkeit v
t=0
ξ
t>0
z
z
vt
Mathematische Beschreibung
• Vollständige Beschreibung: Auslenkung ξ = ξ(z, t)
aus Gleichgewichtslage (bei Ausbreitung in z-Richtung)
• Homogenes Medium
⇒ konstante Ausbreitungsgeschwindigkeit v
• Ungedämpft ⇒ Wellenform bleibt erhalten.
⇒
ξ(z, t) = ξ(z − vt)
• Daraus folgt die Wellengleichung:
∂ 2ξ
1 ∂ 2ξ
= 2 2
∂z 2
v ∂t
2.4 Schwingungen und Wellen. . .
12. Dezember 2001
Harmonische Wellen
Anregung durch harmonische Schwingung:
• Anregung bei z = 0 (o.B.d.A) ⇒ ξ(0, t) = A sin(ωt + ϕ)
• Auslenkung erreicht z > 0 zur Zeit t + z/v
h i
z
z
= A sin ω t −
+ϕ
⇒
ξ(z, t) = ξ 0, t −
v
v
ξ
v
z
Wellenlänge λ
Wellenlänge:
Harmonische Welle:
2π
v
λ = Tv =
v=
ω
ν
i
h z
+ϕ
ξ(z, t) = A sin ω t −
v
= A sin [ωt − kz + ϕ]
h i
z
= A sin 2π νt −
+ϕ
λ
• sin-förmig als Funktion von t
bei festem z
• sin-förmig als Funktion von z
bei festem t
Wellenzahl:
k=
ω
2π
=
λ
v
2.4 Schwingungen und Wellen. . .
12. Dezember 2001
Ebene und Kugelwellen
Wellenausbreitung im Raum:
• I.a. breitet sich Welle im 3-dimensionalen Raum aus
⇒ ξ(z, t) → ξ(~
r , t)
• Wellenfront = Orte gleicher Phasenlage
• Verschiedene Wellenformen:
Kugelwelle oder
Kreiswelle
Ebene Welle
y
Wellenfront
y
Wellenfront
x
k
x
Ebene Wellen:
• Ausbreit. in ~v -Richtung
• Wellenvektor:
~k = 2π ~v
λ |~v |
• Wellendarstellung:
h
i
~
ξ(~
r , t) = A sin ωt − k~
r+ϕ
• Wellenfronten:
~k~
r = const.
2.4 Schwingungen und Wellen. . .
Kugel/Kreiswellen:
• Ausbreitung von Zentrum
radial nach außen
• Wellendarstellung:
ξ(~
r, t) = A sin [ωt − k|~
r| + ϕ]
• Amplitude r-abhängig
• Wellenfronten:
r = const.
19. Dezember 2008
Transversale und longitudinale
Polarisation
Polarisation
. . . bezeichnet die Orientierung der
Auslenkungsrichtung bzgl. der Ausbreitungsrichtung
(je nach Richtung der rücktreibenden Kraft!)
ξ
Transversale Welle
z
• Auslenkung ⊥ Ausbreitung
• Auslenkung in einer Ebene: lineare Polarisation
• Beispiele: Seilwelle, elektromagnetische Wellen
Longitudinale Welle
z
Wellenfront
niedrige
Dichte
hohe
Dichte
• Auslenkung k Ausbreitung
• Z.B. Schallwellen: Ausbreitung von Zonen kleiner
bzw. großer Dichte
2.4 Schwingungen und Wellen. . .
07. Januar 2009
Überlagerung von Wellen
Prinzip:
Die Auslenkungen von zwei oder mehr gleichartigen
Wellen, die sich zu gleicher Zeit in einem gemeinsamen
Raumgebiet ausbreiten, addieren sich:
ξ(~
r , t) = ξ1 (~
r, t) + ξ2 (~
r, t) + . . .
Maxima
(konstruktive
Interferenz)
r2
r1
Auslöschung
(destruktive
Interferenz)
Konstruktive und destruktive Interferenz:
• Überlagerung von Wellen gleicher Wellenlänge
ergibt stationäre Zonen kompletter Auslöschung
(destruktive Interferenz) bzw. maximaler Amplitude
(konstruktive Interferenz).
• Geometrische Bedingungen (zwei phasengleiche
Punktquellen):
konstruktiv:
destruktiv:
|~
r1| − |~
r2| = nλ
|~
r1| − |~
r2| = (2n + 1)
2.4 Schwingungen und Wellen. . .
λ
2
(n ∈ Z)
(n ∈ Z)
07. Januar 2009
Reflexion
Trifft eine einlaufende Welle
ξi (z, t) = A sin(ωt − kz)
senkrecht auf ein
undurchdringliches Hindernis bei z = 0,
so wird eine zurücklaufende Welle erzeugt:
ξf (z, t) = A sin(ωt + kz + ∆ϕ)
• Zwei Möglichkeiten:
ξ
einlaufende Welle
– am festen Ende:
Phasensprung ∆ϕ = π
– losen Ende:
Phasensprung ∆ϕ = 0
z
• Ein- und auslaufende
Wellen überlagern sich:
auslaufende Welle
strut
ξ
ξ(z, t) = ξi(z, t) + ξf (z, t)
( ∆φ =0)
• Am Ort der Reflexion:
z=0
z
– festes Ende: “Knoten”
ξ(0, t) = 0
– loses Ende: “Bauch”
ξ(0, t) = 2A sin(ωt)
2.4 Schwingungen und Wellen. . .
auslaufende Welle
(∆φ =π )
07. Januar 2009
Stehende Wellen
Addition ein- und auslaufender Wellen:
ξ(z, t) = ξi(z, t) + ξf (z, t)
= A [sin(ωt − kz) + sin(ωt + kz + ∆ϕ)]
ϕ
ϕ
sin ωt +
= 2A cos kz +
2
2
Stehende Welle
z
• Stehende Welle:
gleichphasige
Schwingung an allen
Orten, räumlich
variable Amplitude
• Vergleiche mit
normaler Welle:
überall gleiche
Amplitude, aber
räumlich variierende
Phase
z
strut
z
z
z
z
t
2.4 Schwingungen und Wellen. . .
07. Januar 2009
Wellenresonanzen
Anordnung und Resonanzbedingung:
• Welle wird an zwei parallelen Hindernissen reflektiert.
• Konstruktive Überlagerung, wenn alle in eine
Richtung laufende Wellen gleiche Phase haben.
• Dieser Fall heißt Resonanz.
• Beispiele: Saiten von Musikinstrumenten, Antenne,. . .
• Bedingung an Abstand L der Hindernisse und an
Wellenlänge λ, hängt von Art der Reflexion ab:
fest
fest
fest
lose
λ /4
λ /2
3 λ /2
Knoten
z
z
Bauch
λ
Knoten
Knoten
z
3 λ /4
z
5 λ /4
z
L
λ
L=n
2
n∈Z
2.4 Schwingungen und Wellen. . .
z
L
λ
L =(2n + 1)
4
n∈Z
14. Januar 2009
Stehende Welle in Luftsäule
Anordnung
• Luftsäule in Glasrohr,
abgeschlossen durch
Wasser (unten) bzw.
durch Lautsprecher
(oben)
• Durch Variation der
Frequenz werden die
Resonanzen gesucht
(Glasrohr wird zu
Schwingungen angeregt
→ Lautstärkezunahme)
Lautsprecher
L
Luft
Flüssigkeit
Resonanzen:
• Reflexion an Wasser: festes Ende
• Reflexion am oberen Ende: loses Ende
(da Amplitude bei Lautsprecher maximal)
⇒ L = (2n + 1)
λn
cS
2n + 1 cS
⇒ νn =
=
4
λn
4
L
L = 48 cm; cS = 343 m/s bei 20◦ und Normaldruck
⇒ νn = (2n + 1) · 179 Hz
n
0
1
2
berechnet
νn [Hz] λn [m]
179
1.91
537
0.64
895
0.38
2.4 Schwingungen und Wellen. . .
gemessen
νn [Hz]
160
550
880
14. Januar 2009
Dichte und Stoffmenge
Dichte
ρ=
Masse
;
Volumen
[ρ] = kg m−3
Material
Wasser
Beispiele: Luft (trocken, 20◦ C)
Eisen
Blei
ρ [kg/m−3 ]
1.0 × 103
1.3
7.9 × 103
11.4 × 103
Stoffmenge
Zahl der Atome bzw. Moleküle
;
NA
[n] = mol
n=
NA = Avogadro-Zahl
= Zahl der Atome in 12 g
12
C (= 1 mol)
= 6.022 × 1023 mol−1
• 1 mol eines Stoffes hat eine Masse (in Gramm),
die der mittleren Atom/Molekülmasse in amu
(atomare Masseneinheiten) entspricht.
1 amu = 1.66 × 10−27 kg
• Beispiel: 1 mol Sauerstoff O2 hat Masse M = 32 g;
mit ρ = 1.43 kg m−3 ergibt sich
V (1 mol O2 ) = M/ρ = 0.0224 m3
22.4 Liter = “Molvolumen”, für alle Gase bei
Normalbedingungen etwa gleich
3 Flüssigkeiten und Gase
14. Januar 2009
Druck
Druck
~N |
|F
Normalkraft
=
; strut
p=
Fläche
A
A
[p] = N m−2 = kg m−1 s−2
FN
= Pa(ascal)
Umgebung
Luftdruck
(Normalbedingungen)
Beispiele:
Mensch (75 kg) auf
Fläche 20 cm × 20 cm
Vakuum
p [Pa]
1.013 × 105
(105 Pa = 1 bar)
1.84 × 104
& 10−6
Isotroper Druck in
ruhenden Flüssigkeiten & Gasen
Betrachte infinitesimalen
Würfel in Medium
⇒ Gesamtkraft = ~
0
~l = F
~r ,
⇒ F
~o = F
~u,
F
~v = F
~h;
F
⇒ Druck muss in alle
Richtungen gleich
stark wirken
3 Flüssigkeiten und Gase
Fo
Fh
Fl
strut
Fr
Fv
Fu
14. Januar 2009
Kompressibilität
Definition
Die Kompressibilität gibt die relative Volumenänderung
bei Änderung des Drucks an:
1 ∂V
·
V ∂p
[κ] = 1/[p] = Pa−1 = N−1 m2 = m s2 kg−1
κ=−
• Volumen V wird kleiner bei steigendem Druck p
⇒ Kompressibilität κ > 0 .
• Partielle Ableitung ∂V /∂p wird bei festen anderen
Zustandsgrößen (z.B. Temperatur) berechnet.
• Relative Volumenänderung:
∆V
= −κ · ∆p
V
Typische Werte und Beispiel
• κ ist klein für Flüssigkeiten, groß für Gase:
Material
Wasser
Luft (trocken, 20◦C, Meereshöhe)
κ [ m2/ N]
5.0 × 10−10
1.0 × 10−5
• Beispiel: Volumenänderung von 1 m3 Wasser
zwischen Meeresoberfläche und 1 km Tiefe
Berechnung: Druckänderung ist ∆p = 107 Pa ⇒
∆V = −V · κ · ∆p = −1 m3 · 5.0 × 10−10 Pa−1 · 107 Pa
= −5 · 10−3 m3 = −5 Liter
3 Flüssigkeiten und Gase
14. Januar 2009
Hydrostatischer Druck
Druck in homogener Flüssigkeit
im Erd-Schwerefeld:
• Dichte = ρ = const.
• Druck erzeugt durch
Gewichtskraft auf
Flüssigkeitssäule
über gegebener
Grundfläche A
und mit Höhe h
A
ρ
h
~N | = M g = hAρg
|F
~N |
|F
p=
⇒
A
p = hρg
• Druck hängt nur von Höhe h ab, nicht von der
Form des Gefäßes
• Zum hydrostatischen Druck muss der äußere Druck
(Luftdruck) addiert werden.
Anwendung:
• Kleine Steigleitung kann
großes Flüssigkeitsreservoir
unter Druck setzen
• Anwendungen:
Wasserturm, Heizung, . . .
3 Flüssigkeiten und Gase
h
p= ρ gh
ρ
14. Januar 2009
Hydraulische Presse
A1
A2
F1
F2
s1
s2
Funktionsweise:
• Flüssigkeitsgefülltes Gefäß mit zwei Kolben
(Querschnittsflächen A1, A2)
• Auf Kolben 1 wirkt Normalkraft F1 und erzeugt
Druck p = F1/A1 in Flüssigkeit
• Druck in Flüssigkeit hängt nur von Höhe unter
Flüssigkeitsspiegel ab ⇒ auf Kolben 2 wirkt Kraft
F2 = pA2 =
A2
· F1
A1
⇒ “Kraftverstärkung” (hydrostatischer
Druck in Gefäß meist vernachlässigbar)
Anwendungsbeispiele:
• Wagenheber, Hydraulik bei Lastwagen, Maschinen etc.
• Meist mit (Elektro)pumpe statt Kolben 1
• Wegen Inkompressibilität von Flüssigkeiten:
A1 · s1 = A2 · s2 (s1, s2 = Hubwege von Kolben 1,2)
⇒ F1 · s1 = F2 · s2 (Energieerhaltung!)
3 Flüssigkeiten und Gase
14. Januar 2009
Auftrieb
Kraft auf Körper in Flüssigkeit
• Betrachte Quader mit
horizontalen Flächen
und Volumen V in
Flüssigkeit mit
Dichte ρFl
• Hydrostatischer Druck
unten größer als oben
⇒ resultierende
~A
Auftriebskraft F
nach oben:
Fo
ρK
H
A
ρ
ρFl
Fu
~A| = |F
~u| − |F
~o| = ρFl g HA = ρFl gV
FA = |F
|{z}
=V
Die Auftriebskraft entspricht der Gewichtskraft
auf die vom Körper verdrängte Flüssigkeit
(Archimedisches Prinzip)
• Gilt unabhängig von geometrischer Form des Körpers
• Wenn Körper mittlere Dichte ρK hat:
ρK > ρFl ⇒ Körper sinkt
ρK = ρFl ⇒ Körper schwebt
ρK < ρFl ⇒ Körper schwimmt
• Wenn Körper schwimmt:
~A| = |F
~G| ⇒ Vin ρFlg = VK ρK g ⇒
|F
Vin /VK = ρK /ρFl
• Eisberg:
ρEis /ρH2O = Vin/VK ≈ 0.9
3 Flüssigkeiten und Gase
VK −Vin
ρK
V in
ρ Fl
21. Januar 2009
Boyle-Mariotte’sches Gesetz
Zusammenhang von Druck und Volumen
in einem Gas
Boyle-Mariotte’sches Gesetz:
p · V = const.
A
~ |/A (äußerer Druck)
• p = |F
• Die Konstante ist Temperaturabhängig (siehe Kapitel 3)
• Zusammenhang von Druck und
Dichte für feste Gasmenge
(Masse M ):
F
p,V
M
= M · const. · p
⇒
V
ρ ∝ p (bei fester Temperatur)
ρ=
Kompressibilität
• Boyle-Mariotte’sches Gesetz: V = C/p (C = const.)
Für Kompressibilität folgt:
1
C
1 ∂V
1
=− · − 2 =
κ=− ·
V ∂p
V
p
p
Gase lassen sich umso leichter komprimieren,
desto kleiner der Druck ist.
3 Flüssigkeiten und Gase
21. Januar 2009
Druckmessung
Dampfdruck
(klein)
zu messender Druck
(z.B. Luftdruck)
∆h
Flüssigkeit
(z.B. Hg)
Manometer und Barometer:
• Prinzip: Zu messender Gasdruck wird in
hydrostatischen Druck umgewandelt (z.B. in U-Rohr)
• Messung von Druckdifferenz links–rechts:
∆p = ρg∆h
• Bei einem abgeschlossenen und evakuiertem Ende
des U-Rohrs ist ∆p der Druck am anderen Ende
(kleine Korrektur für Dampfdruck der Messflüssigkeit)
• Manometer = allgemeines Druckmessgerät,
Barometer = Messgerät für Luftdruck
• (Früher) oft verwendet: Quecksilber
∆p(1 mm Hg) = 133.3 Pa =
1 Torr
| {z }
alte Druckeinheit
760 Torr entspricht Atmosphärendruck (1.013 × 105 Pa)
3 Flüssigkeiten und Gase
21. Januar 2009
Barometrische Höhenformel
Druck in Atmosphäre im Erd-Schwerefeld:
• Druck wird erzeugt von
Gewichtskraft auf Luft
• Dichte ρ ∝ p nimmt mit h ab
• Druckänderung in kleinem
Höhenintervall dh bei
konstanter Temperatur:
A
gρ(h)A · dh
g · dM
=−
dp = −
A
A
ρ(0)
dp
= −gρ(h) = −g
p(h)
⇒
dh
p(0)
ρ(0)
gh
p(h) = p(0) · exp −
p(0)
h
dh
dM
A
(barometrische Höhenformel)
• Barometrische Höhenformel nur näherungsweise gültig,
da Temperatur in Atmosphäre nicht konstant ist.
• Atmosphäre hat keinen scharfen Rand!
p(0) = 1.013×105 Pa,
ρ(0) = 1.24 kg/ m3 ,
g = 9.81 m/ s2 ⇒
p(h) =
p(0)· exp −
p / p0
1
p=p0 exp(−h / 8.3km)
1/2
h
8.33 km
1/4
1/8
5.8
3 Flüssigkeiten und Gase
11.6
17.4
h [km]
21. Januar 2009
Oberflächenspannung
Kraft auf "Testmolekül":
in
Flüssigkeit
an Oberfläche
Ftot = 0
Ftot = 0
zeigt in Flüssigkeit hinein
Mikroskopisches Bild:
• Atome/Moleküle in Flüssigkeit ziehen einander an
• An Oberfläche: Gesamtkraft auf Atom/Molekül
zeigt in Flüssigkeit hinein
• Es ist Arbeit ∆W nötig,
um Oberfläche um ∆A zu vergrößern:
spezifische Oberflächenenergie = ǫ =
• Arbeit zur Vergrößerung
von Flüssigkeitsfilm:
∆W
;
∆A
L
~ |∆h = 2ǫL∆h
∆W = |F
• Oberflächenspannung:
~|
|F
σ=
=ǫ
2L
• Typische Werte:
σH2O = 0.072 J/ m2
σHg = 0.475 J/ m2
3 Flüssigkeiten und Gase
[ǫ] = J/ m2
Flüssigkeits−
film
h
∆h
F
21. Januar 2009
Seifenblase
pa
d|F|=(p −pa ) dA
i
dA
p
i
2r
Überdruck im Inneren:
• Oberflächenspannung will Oberfläche verkleinern
• ⇒ Überdruck im Inneren, der Kraft nach außen ausübt
• Gleichgewicht, wenn potentielle Energie Ep (r)
minimal ist (wegen Fr = ∂Ep /∂r = 0)
Ep = EOf + EDruck
∂EOf
= 16ǫπr
∂r
∂EDruck
dEDruck = −4πr2 p dr ⇒
= −4πr2p
∂r
4ǫ
∂Ep
=0 ⇒ p=
∂r
r
• Faktor 2, da Seifenblase 2 Oberflächen hat
• Überdruck nimmt mit steigendem Radius ab
EOf = 2ǫ · 4πr2 ⇒
Merke: Gleichgewichtskonfiguration weist
immer minimale potentielle Energie auf!
3 Flüssigkeiten und Gase
28. Januar 2009
Grenzflächen
Oberflächenenergie/spannung bei
Grenzflächen zwischen verschiedenen Medien
• Grenzflächen zwischen zwei Medien 1 und 2 haben
spezifische Oberflächenenergie bzw. -spannung σ1,2 ,
die von den Kräften zwischen den jeweiligen
oberflächennahen Atomen/Molekülen abhängt.
• Bei Flüssigkeiten stellt sich die Oberfläche immer
so ein, dass die Gesamtenergie minimal wird
ε 13
ε
13
g
3
1
φ
1 = Glas
2 = H2 O
3 = Luft
ε 23
3
1
φ
ε 23
2
2
ε 12
1 = Glas
2 = Hg
3 = Luft
ε 12
ε 12 < ε 13
ε 12 > ε 13
Flüssig–flüssig–Gas
• Flüssigkeit 2 schwimmt auf Flüssigkeit 1
• Tropfen stabil, wenn
σ1,3 < σ1,2 + σ2,3
3
ε 23
• Flüssigkeit 2 bildet
Schicht maximaler Fläche
(monomolekular), wenn
σ1,3 > σ1,2 + σ2,3
3 Flüssigkeiten und Gase
ε 12
2
ε 13
1
28. Januar 2009
Kapillarität
Taucht man ein (Glas)röhrchen (Kapillare, Radius R) in
Flüssigkeit, stellen sich innen und außen
unterschiedliche Höhen des Flüssigkeitspiegels ein:
1
1
3
h
3
r
h
2
σ1,2 < σ1,3
φ
2
2R
σ1,2 > σ1,3
Steighöhe:
• Bei ausreichend dünnen Kapillaren ist die
Flüssigkeitsoberfläche näherungsweise kugelförmig
(Radius r = R/ cos φ)
⇒ Druck p = 2σ2,3 /r (halb so groß wie bei Seifenblase,
da hier nur eine Oberfläche existiert).
• Druck p erzeugt Kraft Fp = πR2p = 2πR σ2,3 cos φ
nach oben, die mit Schwerkraft M g = ρπR2hg
im Gleichgewicht ist:
h=
2σ2,3 cos φ
ρgR
• Steighöhen können sehr groß sein (z.B. h ≈ 15 m
für Wasser in Kapillare mit Radius R = 1 µm)
• Ermöglich z.B. Planzen, Wasser in Höhen von mehr als
10 m zu transportieren.
3 Flüssigkeiten und Gase
28. Januar 2009
Strömungen
Vollständige Beschreibung:
• Angabe der Strömungsgeschwindigkeit als Funktion
von Ort und Zeit:
~
u=~
u(~
r, t)
• Im Prinzip: Berechenbar aus Anfangsbedingungen
und Bewegungsgleichung für Volumenelement ∆V
(für alle ~
r und t):
~g (~
~ (~
~p(~
r, t) +
F
r, t) = F
r, t) + F
| {z }
| {z }
Druckkraft
!
= ∆M
| {z }
=ρ∆V
Schwerkraft
~ (~
F
r, t)
| R {z }
Reibungskraft
d~
u(~
r, t)
d~
u(~
r, t)
= ρ(~
r, t)∆V
dt
dt
• In Wirklichkeit: Strömungsprobleme nur in Näherungen
und für Spezialfälle analytisch lösbar.
Strömungstypen
• Stationär:
~
u(~
r) zeitlich konstant
⇒ Bewegung entlang festen
Bahnen (Stromfäden)
• Laminar:
(|~
u| klein, Reibung groß)
Stromfäden vermischen sich
nicht
• Turbulent:
Stromfäden vermischen sich,
nicht stationär, Wirbel
3 Flüssigkeiten und Gase
Strom−
fäden
Turbulente
Strömung
28. Januar 2009