Ferienkurs Experimentalphysik 1
Werbung

Ferienkurs Experimentalphysik 2
Vorlesung 5
Elektrodynamik
Andreas Brenneis, Marcus Jung, Ann-Kathrin Straub
17.09.2010
Inhaltsverzeichnis
1
2
3
Zeitlch veränderliche Felder
1
1.1
Faradaysches Induktionsgesetz . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
1.2
Lenzsche Regel
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
1.3
Induktion
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
1.4
Verschiebungsstrom . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
1.5
Maxwell Gleichungen und elektrodynamische Potentiale . . . . . . . . . . . . . .
3
1.6
Wechselstrom
5
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Elektromagnetische Schwingungen
6
2.1
Elektromagnetische Schwingkreise . . . . . . . . . . . . . . . . . . . . . . . . . .
6
2.2
Gedämpfte elektromagnetische Schwingung . . . . . . . . . . . . . . . . . . . . .
7
2.3
Hertz'scher Dipol
9
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Elektromagnetische Wellen im Vakuum
10
3.1
Die Wellengleichung
10
3.2
Lösung der Wellengleichung
3.3
Eigenschaften elektromagnetischer Wellen
. . . . . . . . . . . . . . . . . . . . .
10
3.4
Polarisation elektromagnetischer Wellen
. . . . . . . . . . . . . . . . . . . . . .
10
3.5
Energie- und Impulstransport durch elektromagnetische Wellen . . . . . . . . . .
11
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10
1 Zeitlch veränderliche Felder
1.1 Faradaysches Induktionsgesetz
Eine sich ändernder magnetischer Fluss induziert eine Spannung. Dieses Phänomen wird durch das
Faradaysche Induktionsgesetz beschrieben:
Uind = −
dφm
dt
(1)
Dazu betrachten wir eine Leiterschleife, die die Fläche A einschlieÿt und senkrecht von einem Magnetfeld B(t) durchsetzt wird.
B(t)
Fläche A
U
Dann ist die induzierte Spannung
Z
−
Ḃ(t) dA = Uind =
Z
E dr =
Z
∇ × E dA .
(2)
Im letzten Schritt wurde der Stokessch Satz verwendet. Aus Vergleich sehen wir das gilt:
∇ × E = −Ḃ
!
(3)
Wir haben damit gezeigt, dass ein sich zeitlich änderntes Magnetfeld ein elektrisches Wirbelfeld
erzeugt.
Die Tatsache, dass es sich dabei um ein Wirbelfeld handelt bedeutet auch, dass wir dieses Feld (wie
es bei den freien Ladungen in der Elektrostatik war) nicht durch ein Potential ausdrücken können.
1.2 Lenzsche Regel
Das Minuszeichen im Faradayschen Induktionsgesetz (vgl. Gleichung 1) drückt folgenden Sachverhalt
aus. Die Ströme, die in einem Leiter induziert werden, wenn er durch ein Magnetfeld bewegt wird,
sind so gerichtet, dass das dadurch erzeugte Magnetfeld der Bewegung des Leiters entgegen wirkt.
Das induzierte Magnetfeld Bind zeigt dabei in die Richtung des sich änderten Feldes, wenn Ḃ < 0.
Für Ḃ > 0 ist es diesem entgegengesetzt.
!
Der Leiter versucht also das herrschende Magnetfeld aufrecht zu erhalten und wirkt einer
Änderung entgegen.
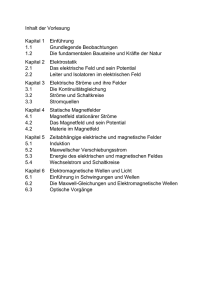
Ein schönes Beispiel dafür ist, wenn man einen kleinen Stabmagneten durch ein (nicht ferromagnetisches) Rohr gleiten lässt. Man beobachtet, dass der Magnet langsamer fällt als im freien Fall.
1
Bind
N
S
g
Bind
1.3 Induktion
Wenn sich in einem stromdurchossenen Leiter (insb. eine Spule) der Strom ändert, dann ist die
induzierte Spannung (nach dem Faradayschen Induktionsgesetzt) so gerichtet, dass sie der Änderung
entgegenwirkt (Lenzsche Regel).
Der Zusammenhang zwischen dem magnetischen Fluss φm und dem Strom durch einen Leiter drückt
die Indkuktivität L aus:
Z
φm = B dA = L · I
(4)
Leiten wir diese Gleichung ab, dann erhalten wir zusammen mit dem Faradayschen Induktionsgesetz
(Gleichung 1):
dI
(5)
Uind = −L ·
dt
1.4 Verschiebungsstrom
Aus der Magnetostatik kennen wir das Amperesche Gesetz in der Form:
I
B · ds = µ 0 I = µ 0
Z
j dA
(6)
Oder dierenziel:
∇ × B = µ0 · j
(7)
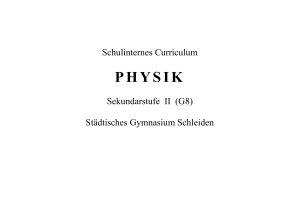
Dabei stellt sich folgendes Problem: In einer Wechselstromschaltung mit Kondensator kann man die
Integration des B-Felds entlang einer geschloÿenen Kurve auf verschiedene Flächen zurückführen,
die durch die geschloÿene Kurve begrenzt werden.
2
Wählt man als Fläche A1 , so erhält man mit der bisherigen Form des Ampereschen Gesetzes ein
korrektes Ergebnis. Ist die Fläche aber gekrümmt, so dass sie zwischen den beiden Platten des
Kondensators verläuft (A2 ), dann verschwindet dort die Stromdichte j .
Lösen lässt sich dies mit der Denition des Verschiebungsstroms j V . Dazu überlegen wir uns
welcher Strom in einem Wechselstromkreis auf den Kondensator ieÿt:
∂E
dQ d
= (0 · A · E) = 0 · A ·
(8)
I=
dt
dt
∂t
Dieser Strom stellt den Verschiebungsstrom zwischen den Platten da:
j V = 0 ·
∂E
∂t
(9)
Man verwendet hier nur die partiellen Zeitableitungen, da diese Formel auch für inhomogene Felder
gilt.
Um also allgemeingültig den Zusammenhang zwischen B-Feld und Strom herzustellen, müssen wir
zum Ampereschen Gesetz den Verschiebungsstrom dazu addieren:
I
B · ds = µ 0 I = µ 0
Z
(j + j V )dA
(10)
Entsprechend wird auch die dierenzielle Form erweitert:
∇ × B = µ0 · (j + j V ) = µ0 · j +
1 ∂E
c2 ∂t
(11)
Im letzten Schritt haben wir c−2 = 0 µ0 verwendet.
Diese Betrachtung führt uns zur folgender Erkenntnis:
!
Neben Strömen erzeugen auch sich zeitlich ändernde elektrische Felder ein Magnetfeld.
Dieses Phänomen wird uns zu den elektromagnetischen Wellen führen.
Das obige Ergebnis wurde für Vakuum hergeleitet. Bei Anwesendheit von Materie kann man die
Gleichung über das vom Dielektrikum unabhängige D-Feld und das H-Feld ausdrücken:
∇×H =j+
∂D
∂t
(12)
Dies lässt sich einfach formulieren, man beachte aber, dass D- und H-Feld in einer Messung nicht
messbar sind.
1.5 Maxwell Gleichungen und elektrodynamische Potentiale
Rückblickend auf die Betrachtungen in der Magneto- sowie Elektrostatik und Dynamik können wir
nun die vier Maxwell Gleichungen im Vakuum angeben:
∇×E =−
∂B
∂t
1 ∂E
∇ × B = µ0 j + 2
c ∂t
ρ
∇·E =
0
∇·B =0
3
(13)
(14)
(15)
(16)
In Materie lauten die Maxwell Gleichungen:
∂B
∂t
∂D
∇×H =j+
∂t
∇·D =ρ
∇·B =0
∇×E =−
(17)
(18)
(19)
(20)
Wir fassen noch einmal zusammen:
!
!
Die Quellen elektrischer Felder sind Ladungen oder sich zeitlich ändernde Magtnetfelder.
Magnetfelder werden von Strömen oder sich zeitlich ändernden elektrischen Feldern erzeugt.
Wir möchten nun die Maxwell Gleichungen auf die Potentiale φ bzw. das Vektorpotential A übertragen. Wie bereits gelernt ist in der Dynamik das elektrische Feld nicht mehr rotationsfrei, deswegen
gilt nicht mehr, dass das elektrische Feld aus dem Gradienten des elektrischen Potentials φel folgt.
Wir können aber Gleichung 13 umstellen:
∇ × E + Ḃ = ∇ × (E + Ȧ) = 0
(21)
Damit muss das Feld E + Ȧ ein Potential besitzen:
E + Ȧ = −∇φ
(22)
Wir erhalten also für das elektrische Feld:
E = −∇φ − Ȧ
(23)
Das Vektorpotential ist nicht eindeutig bestimmt (man könnte zu A immer ein rotationsfreies Feld
dazuaddieren und man erhält das selbe B-Feld). Deswegen fordert man die Lorentzsche Eichbedinung:
∇·A=−
4
1 ∂φ
c2 ∂t
(24)
Damit können wir die Maxwell Gleichung ∇ · E = ρ/0 durch das Potential φ ausdrücken:
ρ
∇ · E = ∇ · −∇ · φ − Ȧ =
0
2
1∂ φ
ρ
→ ∆φ − 2 2 = −
c ∂t
0
(25)
(26)
(27)
Dies ist ein dynamischer Ausdruck für die Poisson Gleichung. Ein ähnliches Ergebnis erhält man
für A, wenn man die Rotation auf Gleichung 14 anwendet1 . Es stellt eine Erweiterung des BiotSavart-Gesetzes dar:
2
1
∂ A
=
= −µ0 j
c2
∂t2
∆A −
(28)
1.6 Wechselstrom
Betrachten wir einen Stromkreis, der aus einer Wechselspannungsquelle Ue = U0 · cos ωt und aus
einer Spule L besteht. Für die Spannung gilt:
Ue + Uind = 0 = U0 cos ωt −
dI
·L
dt
(29)
Integration liefert als Lösung für den Strom:
I=
!
Der Strom ist also 90
◦
U0
sin ωt
Lω
(30)
gegenüber der Spannung verzögert.
Mit diesem Ergebnis können wir den induktiven Widerstand ZL einer Spule formulieren:
|ZL | =
U0
= ωL
I0
(31)
Ein elegantes Konzept ist es, diesen Widerstand als komplex zu betrachten, wobei der Phasenwinkel ϕ
gerade die oben genannte Phasenverschiebung angibt.
tan ϕ =
Re{Z}
Im{Z}
(32)
Mit ϕ = 90◦ folgt für die Spule, dass der Realteil verschwindet und es gilt:
ZL = i · ωL
(33)
Ersetzt man die Spule druch eine Kapazität C dann erhält man mit einer analogen Betrachtung:
ZC =
!
1
1
i · ωC
Der Strom eilt der Spannung also um 90
Es gilt ∇ × (∇ × A) = ∇ · (∇ · A) − ∆A
5
(34)
◦
voraus.
Man kann nun allgemein einen Schaltkreis betrachten der aus einer Spule einem Widerstand und
einer Kapazität besteht, die in Reihe geschaltet sind.
Q
Ue = I · R + LI˙ +
C
(35)
Leitet man diese Gleichung ab, dann erhält man eine DGL in zweiter Ordnung in I .
Um diese zu lösen stellen wir Ue komplex dar: Ue = U0 eiω̇t . Entsprechend wählen wir folgenden
Lösungsansatz:
I = I0 ei·ωt−i·ϕ
(36)
Wohlwissend, dass alle physikalische Gröÿen in diesem Zusammenhang reell sind ist dieser Weg
mathematisch gerechtfertigt. Für eine lineare Dierenzialgleichung gilt, dass wenn die Funktion g(t)
und f (t) Lösungen der DGL sind, dann sind es auch alle Linearkombinationen h(t) = a·g(t)+b·f (t).
Unseren Lösungsansatz können wir schreiben als
ei·ωt−i·ϕ = cos(ωt − ϕ) +i · sin(ωt − ϕ)
{z
}
|
{z
}
|
g(t)
(37)
f (t)
und a = 1, b = i. Wir sehen also, dass wenn unser Ansatz eine Lösung liefert, dann liefert auch sein
Realteil eine Lösung und nur dieser trägt einen physikalischen Sinn.
Als Lösung erhält man:
1
i · ωU = I · −Lω + i · ωR +
C
U
1
→Z=
= R + i · ωL −
I
ωC
2
(38)
(39)
Damit gilt für den Phasenverschiebungswinkel:
tan ϕ =
Für denn Fall ωL =
1
ωC
ωL −
R
1
ωC
(40)
erhält man eine Schaltung in der Strom und Spannung in Phase sind.
2 Elektromagnetische Schwingungen
2.1 Elektromagnetische Schwingkreise
Der elektromagnetische Schwingkreis besteht prinzipiell aus einer Schaltung aus einem Kondensator
C und einer Induktivität (Spule) L, in welcher der Kondensator periodisch aufgeladen und entladen
wird. Dies verhält sich analog zu einem mechanischen System aus 2 Federn, zwischen denen eine
Masse schwingt. Jedoch wird hier elektrische Energie Wel = 12 CU 2 des Kondensators (dies entspricht der potentiellen Energie der Masse m), in magnetische Energie Wm = 12 LI 2 der Spule (dies
entspricht der kinetischen Energie der Masse m im mechanischen Modell), umgewandelt. Bei der
Entladung des Kondensators ieÿt der Strom I = dQ
. Folgende Schritte laufen also bei dem Prozess
dt
ab:
• Der Kondensator wird über eine externe Quelle geladen. Anschlieÿend wird die Quelle entfernt.
6
• Beginnt der Strom sich abzuschwächen, entsteht in der Spule eine Induktionsspannung, welche
die Abnahme von I hemmt, also den Strom weiter treibt, bis der Kondensator umgekehrt
aufgeladen ist.
• Nun beginnt der selbe Prozess in der anderen Richtung.
2.2 Gedämpfte elektromagnetische Schwingung
Analog zum mechanischen Modell, bei dem Reibung die Schwingung dämpft, wirken beim elektromagnetischen Schwingkreis die ohm'schen Widerstände R von Spule und Leitungen als Energiever= I 2 R abnimmt. Man hat es also nun mit einer
lustquellen, sodass die Energie pro Sekunde um ∆W
∆t
gedämpften Schwingung zu tun.
Man betrachtet wieder den Bereits bekannten Schwingkreis. Kondensator wird wieder über eine externe Quelle aufgeladen.
7
Mithilfe der Kirchho'schen Regeln lässt sich die Spannungsbilanz wie folgt aufstellen:
+ RI +
Ue = L dI
dt
Q
C
Leitet man dies nun nach t ab, erhält man:
dUe
dt
2
= L ddt2I + R dI
+
dt
I
C
Nach Abschalten der externen Spannungsquelle führt dies nun zu einer homogenen Dierentialgleichung 2. Ordnung:
2
L ddt2I + R dI
+
dt
I
C
=0
Zur Lösung der Dierentialgleichung verwendet man nun folgenden Ansatz:
I = aeλt
Setzt man dies nun in die Dierentialgleichung ein, erhält man:
λ2 + R
λ+
L
1
LC
=0
Und als Lösung bekommt
man:
q
R2
4L2
R
+−
λ1,2 = − 2L
−
1
LC
= α + −β
Somit wählt man als allgemeine Lösung der Dierentialgleichung eine
Linearkombination:
I(t) = A1 e−(α−β)t + A2 e−(α+β)t
Nun lassen sich je nach β 3 Fälle unterscheiden:
q
• Kriechfall: β reell: → R > 2 CL
Je nach Anfangsbedingungen erhält man nun leicht unterschiedliche Lösungen:
˙ = 0) = 0
a) Anfangsbedingungen: I(t = 0) = I0 , I(t
→ I(t) = I0 e−αt [cosh(βt) + αβ sinh(βt)]
Der Strom fällt monoton und kriecht asymptotisch gegen 0.
˙ = 0) 6= 0 → I(t) = I˙0 e−αt sinh(βt)
b) Anfangsbedingungen: I(t = 0) = 0, I(t
β
Der Strom steigt erst von 0 an um dann wieder asymptotisch gegen 0 zu sinken.
q
• aperiodischer Grenzfal:l β =0 (R = 2 CL )
Für β = 0 erhält man die Lösung I(t) = e−αt (I0 + A3 t) mit der Konstanten A3 = I˙ + αI0 .
Für I0 = 0 erhält man I(t) = I˙0 te−αt
q
• Gedämpfte Schwingung: β imaginär (R < 2 CL )
Setzt man nun β = iω an, erhält man als Lösung: I(t) = 2|A|e−αt cos(ωt + ϕ) Der Strom
I(t) führt
q also eine gedämpfte Schwingung aus mit der Frequenz
ω=
1
LC
−
R2
4L2
8
2.3 Hertz'scher Dipol
Nachdem nun elektromagnetische Schwingkreise behandelt worden sind, bei denen die Energie periodisch zwischen elektrischer Feldenergie eines Kondensators und magnetischer Energie einer Induktivität oszilliert, versucht man nun, den geschlossenen Schwingkreis in einen oenen zu überführen.
• Zunächst liegt ein ungedämpfter Schwingkreis mit Kapazität und Induktivität vor.
• Die Spule wird nun soweit auseinander gezogen, das sie am Ende nur noch aus einer Windung
besteht.
• Danach werden die Kondensatorplatten voneinander getrennt, sodass ein gerader Draht mit
zwei geladenen Platten entsteht.
• Die Platten können im letzten Schritt entfernt werden, sodass nur noch ein gerader Draht
vorhanden ist.
Dies ist nun der Hertz'sche Dipol. Durch diese Vereinfachungen werden natürlich Kapazität und
Induktivität stark verringert, was eine erhöhte Schwingungsfrequenz zur Folge hat. In diesem Dipol
können die Ladungen zur Schwingung angeregt werden. Dies hat einen Wechselstrom im Draht zur
Folge. Experimentell lässt sich zeigen, dass der funktionale Verlauf des Stromes einer stehenden
Welle entspricht, deren Amplitude an den Drahtenden 0 ist. die maximale Wellenlänge beträgt also
λ = 2l Durch diese periodische Ladungsverteilung entsteht abwechselnd ein elektrisches Dipolfeld
parallel zum Dipol und ein magnetisches Wirbelfeld senkrecht zum Dipol.
Auf diese Weise werden vom Dipol elektromagnetische Wellen in den Raum abgestrahlt. Ein solcher
Dipol muss technisch natürlich permanent zu Schwingungen angeregt werden, da diese sonst, aufgrund von Reibung, schnell zum erliegen kommen würden. Die Energiestromdichte eines Dipols, also
die pro Zeit- und Flächeneinheit transportierte Energie beträgt S = 0 cE 2 Die mittlere abgestrahlte
q 2 w4 d20
Leistung beträgt: P = 12π
3
0c
9
3 Elektromagnetische Wellen im Vakuum
3.1 Die Wellengleichung
Um auf die Wellengleichung zu kommen, betrachtet man sich zunächst die Maxwell-Gleichungen,
und rotB = − c12 ∂E
vereinfachen. Wendet man auf die linke
die sich im Vakuum zu rotE = − ∂B
∂t
∂t
Seite die Rotation an, und setzt die Rechte Gleichung ein, erhält man:
∇ × ∇ × E = −∇ ×
∂B
∂t
2
∂
= − ∂t
(∇ × B) = − c12 ∂∂tE2
Unter der Verwendung von
∇ × ∇ × E = grad(divE) − div(gradE) = 0 − div(gradE) = −∆E
erhält man schlieÿlich die Wellengleichung für das elektrische Feld:
2
∆E = − c12 ∂∂tE2
Für das Magnetfeld lässt sich auf analoge Weise auch eine Wellengleichung herleiten.
3.2 Lösung der Wellengleichung
Als Lösung der Wellengleichung bietet sich in den meisten Fällen eine ebene Welle an: E(r, t) =
E 0 ei(kr−ωt)
Hier ist |k| = k =
2π
λ
die Wellenzahl und ω = 2πν die Kreisfrequenz mit c = νλ
3.3 Eigenschaften elektromagnetischer Wellen
Man nimmt nun an, dass sich das elektrische Feld in x-Richtung ausbreitet. Wegen divE = 0 folgt
∂E
= 0 und somit ist das elektrische Feld in x-Richtung konstant, also E ⊥ k. Nun legt man das
∂x
Koordinatensystem so, dass das elektrische Feld nur noch eine y-Komponente hat. Mit der Maxwellndet man, dass das magnetische Feld nur noch eine z-Komponente hat.
gleichung rotE = − ∂B
∂t
Dies bedeutet also:
E⊥k
B⊥k
B⊥E
Dies lässt sich auch über folgende Formel ausdrücken:
B = ω1 (k × E)
Dies führt zu folgendem Betrag des magnetischen Feldes:
B = 1c E
Elektromagnetische Wellen sind somit transversale Wellen, bei denen beide Felder senkrecht aufeinander stehen und zudem noch senkrecht zur Ausbreitungsrichtung.
3.4 Polarisation elektromagnetischer Wellen
Prinzipiell unterscheidet man zwischen linear, zirkular, elliptisch und unpolarisierten Wellen.
• Eine linear polarisierte Welle schwingt in einer Ebene, d.h. der Amplitudenvektor der Welle
zeigt immer in die gleiche Richtung, also E 0 = E0x ex + E0y ey Zudem sind die verbleibenden
Komponenten in Phase.
10
• Bei einer zirkular polarisierten Welle sind die Beträge E0x , E0y gleich, aber ihre Phasen um
90◦ gegeneinander verschoben, also Ex = E0x cos(ωt − kz) und Ey = E0y cos(ωt − kz − π2 )
• Bei elliptisch polarisierten Wellen ist entweder die Bedingung E0x = E0y nicht erfüllt, oder die
Phasenverschiebung nicht genau 90◦ .
• Hat der E 0 Vektor der Welle keine zeitlich konstante Richtung in der x-y-Ebene, und durchläuft
auch keine Ellipse, sondern ändert er seine Richtung im Laufe der Zeit, liegt eine unpolarisierte
Welle vor. Lichtwellen sind im Allgemeinen unpolarisiert.
3.5 Energie- und Impulstransport durch elektromagnetische Wellen
Die Energiestromdichte ist die Energie, die pro Zeiteinheit durch eine Flächeneinheit senkrecht zu
k, also senkrecht zur Ausbreitungsrichtung transportiert wird:
I = c0 E 2
Der Poynting-Vektor gibt die Richtung des Energieusses an:
S = E × H = 0 c2 (E × B) mit S = |S| = I
Ebenso, wie man einer elektromagnetischen Welle eine Energiestromdichte zuordnen kann, kann man
ihr auch eine Impulsdichte zuordnen:
Π = c12 S = 0 (E × B) mit|Π| = cI2
Bei Reexion einer Welle an einer Wand, herrscht ein Druck auf die Wand. So lässt sich nun der
Strahlungsdruck für elektromagnetische Wellen denieren:
pst = c|Πst | = 0 E 2 = w
11