technische universit ¨at m ¨unchen
Werbung

TECHNISCHE UNIVERSITÄT MÜNCHEN
Zentrum Mathematik
P ROF. D R .D R . J ÜRGEN R ICHTER -G EBERT, T HORSTEN O RENDT
Projektive Geometrie (WS 2009/2010)
— Aufgabenblatt 13 (27. Januar 2010) —
Aufgabe 44. Die Kugel als Modell der elliptischen Geometrie.
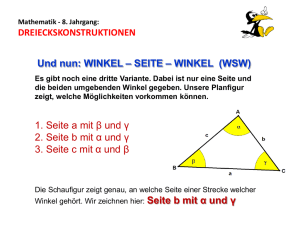
Für die projektive Ebene kann als Modell die Sphäre mit Identifizierung gegenüberligender Punkte gewählt werden,
d.h. einem Punkt P = (px , py , pz ) ∈ RP2 wird das Punktepaar ( kP1 k P, − kP1 k P ) zugeordnet. Projektive Geraden sind
dann Grosskreise auf der Kugel, d.h. Schnittmengen der Kugel mit durch den Ursprung gehenden Ebenen: Für jede
Gerade ist es der Schnitt der Kugel mit der Ebene, auf welcher der Vektor der homogenen Koordinaten der Gerade
senkrecht steht (Beispiel: siehe Gerade l rechte Skizze unten, die Gerade m ist die Gerade im Unendlichen).
Als Abstandsmessung zweier auf der Kugel liegender Punkte A und B kann der Winkel zwischen A, dem Ursprung
und B gewählt werden, also dist(A, B) :=<)AOB.
Der Winkel zwischen zwei Geraden l und m sei durch den Winkel zwischen den beiden definierenden Ebenen bestimmt.
A
l
B
O
dist(A,B)
angle(l,m)
m
Es soll bewiesen werden, dass diese Massbestimmung genau der Geometrie nach Cayley-Klein mit Fundamentalgebilde x2 + y 2 + z 2 = 0 entspricht, d.h. der sog. elliptischen Geometrie.
1. Die Abstandsbestimmung soll als erstes behandelt werden. Es ist zu zeigen, dass für zwei Punkte A und B der
oben definierte Abstand dist(A, B) gleich der Cayley-Klein-Distanz ist. Zur Erinnerung: Sei l die Gerade durch
die Punkte A und B und seien die beiden Punkte P und Q deren Schnittpunkte mit dem Fundamentalgebilde
x2 + y 2 + z 2 = 0. Dann ist die Cayley-Klein-Distanz von A und B gerade als − 2i ln(A, B; P, Q) definiert.
Um die Übereinstimmung dieser beiden Definitionen nachzuweisen, gehen Sie wie folgt vor:
a.) Als elliptische Transformationen werden diejenigen projektiven Transformationen bezeichnet, die das
Fundamentalgebilde x2 + y 2 + z 2 = 0 auf sich selbst abbilden. Zeigen Sie, dass die elliptischen Transformationen bis auf skalares Vielfaches die orthonormalen Abbildungen sind, d.h. die Abbildungen mit
Matrizen T ∈ R3×3 mit T T T = I3 , wobei I3 die Einheitsmatrix ist.
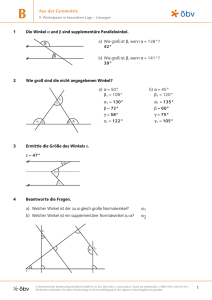
b.) Aus der Linearen Algebra ist bekannt, dass die orthogonalen Abbildungen die Drehungen und Spiegelungen im R3 sind, also Längen und Winkel von beteiligten Vektoren erhalten. Argumentieren Sie, dass es
immer eine orthogonale Abbildung gibt, die einen Grosskreis l auf einen anderen Grosskreis m abbildet.
Warum bedeutet dies eine Vereinfachung unseres Problems? Oder konkreter: Warum ist es möglich, sich
auf Punkte A und B, die in der z = 0 Ebene liegen, zu beschränken?
(Hinweis: Was tun orthogonale Abbildungen mit der oben definierten dist-Funktion, was tun sie mit der
Cayley-Klein-Distanz?)
z
l
A
y
B
z=0
x
A’ B’
c.) Zeigen Sie, dass die Schnittpunkte der Geraden im Unendlichen l∞ (z = 0) mit dem Fundamentalgebilde
x2 + y 2 + z 2 = 0 gerade die beiden Punkte I = (−i, 1, 0)T und J = (i, 1, 0)T sind. Was ist die CayleyKlein-Distanz zweier Punkte A und B auf l∞ ?
(Hinweis: A = (ax , ay , 0)T , B = (bx , by , 0)T , wobei kAk2 = a2x + a2y = 1 und kBk2 = 1.)
Warum entspricht diese Distanz gerade dem Winkel zwischen A, O und B?
O
A
B
2. Führen Sie die (ganz ähnliche und ebenfalls in mehreren Schritten machbare) Betrachtung für die Übereinstimmung
der Winkel durch.
Aufgabe 45. Hyperbolische Abstandsbestimmung.
Wir betrachten die hyperbolische Metrik auf der Gerade RP1 . Das Fundamentalgebilde bestehe aus den Punkten X
und Y .
a) Der hyperbolische Abstand auf der Gerade ist gegeben durch d(P, Q) := ln(P, Q; X, Y ), wobei das Doppelverhältnis als
[XP ][Y Q]
(P, Q; X, Y ) :=
[Y P ][XQ]
definiert ist. Für einen beliebigen Punkt P ∈ RP1 , bestimmen Sie den Punkt Q, sodass d(P, Q) = 1.
Hinweis: Im nicht degenerierten Fall (den wir hier annehmen, gibt es für alle Q Skalare λ und µ, sodass Q =
λX + µY . Bestimmen Sie λ und µ und hieraus Q.
b) Das Fundamentalgebilde sei nun festgelegt auf C = {(x, y) : x2 − xy = 0}. Was sind X und Y ? Zeichnen Sie
sie in die auf einem projektive Zahlengerade ein.
c) Sei Q0 = (1/2, 1)T . Berechnen Sie den Punkt Q1 , der von Q0 den Abstand 1 hat. Dann analog Q2 , der Abstand
1 zu Q1 hat usw. Zeichnen Sie die Qi in die Skizze ein. Was fällt auf?
Aufgabe 46. Spezielle Transformationen.
Gegeben sei eine Cayley-Klein Geometrie G mit einer Ellipse F als Fundamentalgebilde. Ferner seinen l, m zwei
Geraden aus RP2 , dich sich innerhalb von F schneiden. Wir nennen eine projektive Transformation τ aus RP2 eine
Drehung von G, wenn τ genau einen Fixpunkt innerhalb von F hat und F als Ganzes fest lässt. Geben Sie ein
Verfahren an, mit dem Sie die Drehung τ von G bestimmen können, die als Fixpunkt den Schnittpunkt von l und m
hat und l auf m abbildet.
Hinweis: Suchen Sie harmonische Punkte auf F , die τ eindeutig festlegen.