Prüfung Geoinformatik Erik
Werbung

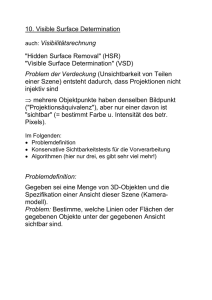
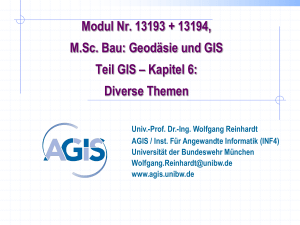
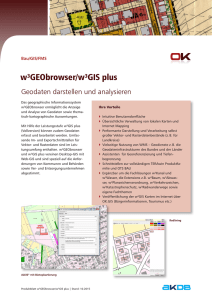
Prüfung Geoinformatik Erik Vektor/Rasterdaten Einsprechthema kurz hintereinander vorgestellt (10 insgesamt) Besondere Merkmale Enumerationsverfahren/ Randdarstellung Grundelemente; Topologie; Darstellbarkeiten der Elemente Enumerationsverfahren (spatial occupancy enumeration) Beschreibung 2D Flächenelement (Pixel) < Volumenelement (Voxel) Rastermatrix < Raumgitter Anwendung GIS: Rasterdatenmodell, z.B. Klassifikation von Fernerkundungsdaten Beschreibung 3D Objektbeschreibung durch Menge gleichförmiger Volumenelemente (=Voxel), z.B. Quader Merkmale Darstellungsraum besitzt festes Raumgitter Zusammensetzung eines Objektes durch Voxel Darstellung vollständig und eindeutig Randdarstellung (Boundary representation Beschreibung 2D Objektbeschreibung durch seine Begrenzungselemente Flächen (Maschen), Linien (Kanten), Punkte (Knoten, Ecken), bestimmt durch analytische Funktionen, Approximationen Merkmale Flächen: eben, gekrümmt (Bezier-, Splineflächen) Linen: Geraden, Kurven, Kreisbögen Einfache Trennung zwischen Geometrie und Topologie Darstellung vollständig, aber nicht eindeutig Anwendung GIS: Vektordatenmodell 3D Fläche (2D) Enumerationsverfahren - 3D-Objekt Haus - Fläche zusammengesetzt zusammengesetzt aus aus gleichförmigen gleichförmigen Flächenelementen (Pixel) Volumenelementen - Bildung homogener (=Würfel) thematischer Raster - Würfelzerlegung Oktogonalbaum Randdarstellung - 3D-Objekt Haus - Fläche zusammengesetzt zusammengesetzt aus aus unterschiedlichen unterschiedlichen Linienzügen, Polygone Begrenzungselementen - Bildung von Punkt-, (Polygone) Linien-, Flächenmaßen - Bildung von Punkt-, Linien-, Flächenmaßen 1 Datenerfassung/ Methoden bedingen zum Teil den Maßstab Datenerfassung GIS: Aufnahme der geometrischen, semantischen Objektmerkmale durch Beobachtung der Realwelt, Auswertung von Datensammlungen Funktion/Relevanz Datenerfassung entscheidend für Anwendung und Erfolg eines GISEinsatzes, da Daten entscheidende GIS- Komponente Datenerfassung: bis 85% Gesamtkosten von GIS = 15-50% jedes GISProjekts Erfassungsverfahren Verfahren regeln Prozess der Datenakquisition, legen fest, welche Daten erfasst werden Verfahren bestimmen Merkmale der zu erfassenden Daten bezüglich Datenqualität, Genauigkeit: Dokumentation durch Metadaten Erfassungsvorschrifthäufig Grundlage der Datenerfassung Gliederung nach Erfassungsverfahren der Geodaten o primäre Datenerfassung: Ersterfassung in Realwelt o sekundäre Datenerfassung: Übernahme aus Datenquellen Gliederung Primäre Erfassungsmethoden Datenakquisition unmittelbar: Realweltobjekt bzw. Abbild Primärdaten o Vermessung: Fernerkundung, Photogrammetrie o Geländeaufnahme, Befragung Sekundäre Erfassungsmethoden Datenakquisition mittelbar: Übernahme vorverarbeiteter Analog-/Digitaldaten Sekundärdaten o Digitalisierung, Scannen: Tastatureingabe Datentyp Raster Vektor Erfassung primär digitale GPS-Messungen: Fernerkundungsdaten: Vermessungsdaten digitale Luftbilder sekundär gescannte Karten bzw. topographische Karten (Luft)Bilder: Digitale Namendatenbanken Geographische Höhenmodelle aus Karten Datenerfassung: Methodenvergleich Erfassungsmethode primär Vermessung Orthogonalaufnahme Tachymetrie GPS Photogrammetrie Stereoauswertung DGM Fernerkundung Interpretation Element Genauigkeit Raumbezug Aufwand Punkt, Linie Punkt, Linie Punkt, Linie cm-dm cm-dm cm-m lokal lokal lokal-global gering mittel gering Punkt, Linie Punkt, Linie 1*10-5mb 1*10-4hg lokal-regional lokal-regional hoch hoch Fläche k.A. lokal-global gering 2 Dig. Bildverarbeitung sekundär Digitalisierung manuell automatisch (Scannen) Fläche >10 m regionalglobal hoch Punkt, Linie Punkt, Linie 2,5*10-4*mk 2,5*10-4*mk lokal-global lokal-global mittel hoch Einschub von Asche: bei Rasterdaten und Darstellungsmöglichkeiten in Hinblick auf Auflösung tägliche Anwendung Bilder in der Zeitung: Unschärfe liegen bei ca. 300 dpi damit keine erkennbaren Pixel ab 2500 dpi (Hochleistungsfarbdrucke in Bildbänden z.B.) Punktdichte in dpi (dots per inch, engl. für Punkte pro Zoll), Konvertierung der Geometriedatenarten Möglichkeiten der Überführung beider Datenarten in einander: entsprechende Probleme (an Skizzen erklärt) Konvertierung Vektor Raster: einfach, Standardverfahren (bsp. Scannen) Raster Vektor: problematisch, interaktive Nachbearbeitung erforderlich Vektor- Raster- Konvertierung Wandlung von Vektor- in Rasterdaten o Sortierung der Vektoren in horizontale/vertikale Bänder bzw. Kacheln (Pixel) o Berechnung des Geradenschnittes mit Zeilen-/ Spaltenindizes der Rastermatrix Ergebnis: binäre Rasterdaten entsprechend Pixelgröße, gemäß Länge, Richtung der Vektoren Die Vektor-Raster-Konvertierung ist mit relativ einfachen Algorithmen durchführbar: 3 Über das vektorielle Untersuchungsgebiet wird ein Rastersystem gelegt Diejenigen Rasterzellen, die einen Knoten beinhalten bzw. von einer Kante geschnitten werden, sind mit ihren zugehörigen Raster-Indizes zu markieren und mit dem entsprechenden Attribut des Vektorobjektes zu versehen. Probleme bei dieser Vektor-Raster-Konvertierung entstehen z.B. dann, wenn in einer Rasterzelle Bestandteile mehrerer Vektorobjekte liegen (z.B. 2 Knoten) ein Knoten genau auf der Grenze zwischen zwei Rasterzellen liegt zwei Vektorobjekte nicht benachbart sind, in der gröberen Rasterstruktur aber künstlich Nachbarschaften entstehen Kanten diagonal verlaufen, dann entsteht bei der Konvertierung in die Rastergeometrie ein Treppeneffekt polygonale Flächen so klein sind, dass sie bei der notwenigen Dominanzprüfung in der Rasterzelle (bei Anteilen aus verschiedenen Polygonen wird in der Regel nach dem grössten Anteil entschieden) vernachlässigt werden Raster-Vektor- Konvertierung Wandlung von Raster- in Vektordaten: o Erzeugung eines Binärbildes aus Vordergrundflächen (=Vektoren) und komplementären Hintergrundflächen o Berechnung des Geradenschnittes mit Zeilen-/Spaltenindizes der Rastermatrix Verfahren 4 o Randlinienextraktion: Ränder der Vordergrundpixel durch geschlossene Vektorpolygone ersetzt o Mittellinienextraktion: Vordergrundflächen durch Rasterskelette ersetzt, die abhängig von Pixelgröße in Vektorpolygone gewandelt werden Der umgekehrte Weg der Raster-Vektor-Konvertierung ist nur teilweise automatisch (algorithmisch) lösbar, weil wegen der gröberen Auflösung des Raster-Modells und der anderen Art von Topologie (Ecken/Kanten der Rasterzellen) nicht in allen Fällen eine eindeutige Zuordnung zu Punkten, Linien oder Flächen des Vektor-Modells möglich ist. Nur vier Beispiele für Probleme: Ist eine Folge von 3 Rasterzellen ein Linienzug oder eine längliches Flächenelement? Bei ecken-benachbarten Rasterzellen muss eine Entscheidung zum vektoriellen Linienverlauf getroffen werden: Linien kreuzen sich: nur „willkürliche“ Regeln können die Priorität entscheiden, jedenfalls geht die Konnektivität einer der Linien verloren. Flächen grenzen in Zellen bei ambivalenten Regeln aneinander (50%-Anteil, Mittelpunkt etc.) Verfahren zur Raster-Vektor-Konvertierung beinhalten z.B. folgende Lösungsansätze: Umwandlung des Rasters in ein vektoriell definiertes Gitter (Raster"grenzen" werden zu Gitterlinien), um die vektoriellen Objekte mittels Koordinaten überhaupt definieren zu können Reduzierung der Rasterdaten auf ein binäres Attribut (1=Attributwert soll für Vektorobjekt übernommen werden, 0=keine Übernahme) Soll eine Rasterzelle in einen Punkt konvertiert werden, so wird die Geometrie des Punktes aus dem Mittelpunkt der Gitterkoordinaten berechnet Die Vektorisierung von Linien wird durch schrittweise Skelettierung der zugehörigen Pixelabfolge durchgeführt (bis die Raster-'Linie' nur noch 1 Pixel breit ist) Vektorisieren von Rasterzell-Haufen zu vektoriellen Polygonen durch Absuchen topologisch benachbarter Rasterzellen (Kanten- und Ecken/KantenTopologie?) nach dem binären Attributwert =1. In der Regel ist bei der Raster-Vektor-Konvertierung ein interaktives Bearbeiten am Monitor oder gar Nacharbeiten per Hand notwendig. Daher ist jeweils zu prüfen, ob 5 eine vektorielle Neuerfassung der Basisdaten sogar weniger arbeitsaufwendig und ggf. auch genauer ist. Darstellung in GIS Darstellung in GIS wie geregelt; parallele Darstellung; möglich Speicherart anders Darstellung beider Datenformate in Zusammenhang mit Höhendarstellung lief auf TINs hinaus Modellierung von Oberflächen: Methoden Modellierungsverfahren Repräsentation einer kontinuierlichen Oberfläche hauptsächlich durch drei Modellierungsverfahren Gittermethode (Grid) triangulierte Isolinienmethode Stützpunktfelder (TIN) Modellierung von Oberflächen: Gitter (Grid) Raster Konstruktion Oberflächenmodellierung mit regelmäßig verteilten Stützzellen Rasterdaten flächenhafte Interpolation der Wertkoten (Kote: Höhenpunkt oder Höhenachse, Messreferenz der Geodäsie und Geometrie) Gitter Merkmale Darstellungsraum: festes Raumgitter, konstante Maschenweite, keine Zwischenpunkte möglich homogene Wertinformation pro Gitterzelle Maschenweite abhängig von Punktdichte, Rechenaufwand, Speicherbedarf generalisierte Wertefelddichte, Werte generalisierte Oberflächenapproximation Objektzusammensetzung durch Pixel Darstellung vollständig und eindeutig Modellierung von Oberflächen: Dreiecke (TIN) Konstruktion Oberflächenmodellierung mit unregelmäßigen Dreiecken lineare Verknüpfung der Wertkoten: Dreiecksvermaschung Vektordaten Merkmale Darstellungsraum: variable Raumzellen: Zwischenpunkte möglich zWertermittlung durch Interpolation in Dreiecken 6 unregelmäßige Maschenweite erlaubt kompakte Repräsentation der Oberflächenrauhigkeit exakte Oberflächenapproximation Dreiecksvermaschung abhängig von Dichte, Verteilung des Wertefeldes, Reihenfolge Vermaschung Darstellung vollständig, u.U. nicht eindeutig Delauney- Triangulation Ableitung von Thießen- Polygonen möglich: Mittelsenkrechte Dreiecksvermaschung Bei der Dreiecksvermaschung (Triangulation) werden die in den vorangegangenen Schritten gewonnenen signifikanten Stützpunkte so mit Linien verbunden, dass Dreiecke entstehen. Aus der Abbildung rechts wird deutlich, dass es für die vier Punkte zwei verschiedene Triangulationsmöglichkeiten gibt. Eine grundlegende Idee geht davon aus, dass die Genauigkeit von Oberflächen an gemessenen Stützpunkten am größten ist, daher jeder Punkt in einem Dreieck einem Stützpunkt möglichst nahe sein soll. Genau diese Eigenschaft wird von möglichst gleichseitigen Dreiecken am ehesten gewährleistet. Die Delaunay- Triangulation [sprich: delonä'] ergibt optimal kompakte Dreiecke und ist daher in praktisch allen Systemen implementiert. Definitionsgemäß bilden drei Punkte genau dann ein Delaunay- Dreieck, wenn ein durch diese drei Punkte bestimmter Kreis keinen anderen Stützpunkt einschließt. Da die definitionsgemäße Umsetzung des Delaunay- Ansatzes rechentechnisch sehr aufwendig ist, geht man meist von Thiessenpolygonen als Konstruktionsalgorithmus aus: Zwei Punkte sind dann mit einer Dreieckskante zu verbinden, wenn ihre Thiessenpolygone eine gemeinsame Kante / Grenzlinie aufweisen. Ergebnis: erzeugte Dreiecke überlappungsfrei: Vermaschung ist eindeutig, ergibt stets dieselbe Vermaschung Thießen- Polygone (Voronoi- Diagramm) Begriff: Verfahren der Flächenerstellung als Grundlage für Interpolationen: beschreibt Nachbarschaftsbeziehungen von Flächen bzw. Punkten Nachbarschaftsgraph Konstruktion: Thießen- Polygon eines Punktes durch Konstruktion der Mittelsenkrechten von allen Nachbarpunkten: dabei Berücksichtigung von 6-8 Nachbarpunkten, die nahe bei gesuchtem Punkt liegen: die Mittelsenkrechten schneiden sich an Thießen- Scheitelpunkten, deren Verbindung ergibt Thießen- Polygon 7 Anwendung Thießen- Polygonmethode als Funktion in GIS integriert Zusammenhang mit Voronoi- Diagrammen Die Delaunay- Triangulierung ist der duale Graph des Voronoi- Diagramms der Punktemenge: Die Ecken der Voronoizellen sind die Umkreismittelpunkte der Dreiecke der Delaunay- Triangulation Der Vorteil einer solchen Netzwerkstruktur gegenüber regelmäßigen Rastern besteht in der hohen Abbildungsqualität der Oberfläche bei wesentlich geringerer Punktezahl. Dieser Vorteil muss allerdings durch eine aufwendigere Speicherstruktur und kompliziertere Verarbeitungsalgorithmen erkauft werden. Modellierung von Oberflächen: Isolinien Konstruktion Oberflächenmodellierung mit Isolinien: Verbindung von interpolierten Stützpunkten gleicher Werte Wertlinien lineare Verknüpfung der Stützpunkte Vektordaten Merkmale Darstellungsraum: variables Liniennetz, Anpassung an reale Oberfläche Zwischenpunkte möglich z-Wertermittlung durch Interpolation Richtungsänderung von Isolinien erfordert dichtes Punktefeld Exaktheit der Oberflächenapproximation abhängig von Dichte, Verteilung des Wertefeldes Darstellung vollständig und eindeutig Ableitung von Schichtflächen zwischen willkürlich definierten, i.d.R. nicht äquidistanten Schichtabständen Verschiedene Analyseverfahren Layerprinzip Konstruktion Separation der semantischen Merkmale von Geoobjekten in verschiedene Ebenen (layer) thematische Dimension der Semantikattribute: 1-n Ausprägungen Ordnung der Ebenen nach Objekten: objektbasierte Modelle Ordnung der Ebenen nach Einzelattributen: primitivenbasierte Modelle Kartographie: Folienprinzip Geographie: Länderkundliches Schema Merkmale hierarchielose Strukturierung, alle Ebenen gleichberechtigt jeder Ebene Attributtabelle zugehörig Ebenen unabhängig voneinander: Inhalte ebenengetrennt auswertbar, präsentierbar Aggregation, Überlagerung, Verschneidung der Ebenen möglich Erzeugung neuer Ebenen Beispiel Geobasisdaten/ Geofachdaten: Senatsverwaltung für Stadtentwicklung Berlin 8 Die Verknüpfung der Ebene untereinander erfolgt durch den Raumbezug. Verschneidung was mit der Datenstruktur passiert (Verschneidung pkt./poly; linie/polygon usw.) Begriff: Verschneidung, overlay Überlagerung verschiedener Informationsebenen (Layer) zur Bestimmung neuer Geoobjekten (Fläche, Linie) mit bestimmten Merkmalskombinationen digitales Zusammenführen von Lage- bzw. Attributinformationen mehrerer Objekte, Objektklassen, thematischer Ebenen Gruppe grundlegender GIS- Funktionen: Kernfunktionen Ziel Selektion von Geoobjekten nach topologisch-thematischen Kriterien durch Verschneidungsoperationen Generierung neuer Geoobjekte durch geometrische Überlagerung mehrerer Geoobjekte: Übernahme der Attribute von Basisobjekten Neuaufteilung Geometrie, Sachattribute Arten Vektorverschneidung: häufigster Fall in GIS Kartographie Rasterverschneidung: einfache Realisierung durch Matrix Fernerkundung Operationen Polygonverschneidung mit Fläche (=Flächenverschneidung), Linie (=Linienverschneidung), Punkt (=Punktverschneidung) Historie Kartenüberlagerung (overlay mapping): Überlagerung von Karten(folien) über Lichtquelle: Ziel: Erzeugung neuer Karten hoher Informationsdichte durch Datenaggregation Anwendung Eignungsbewertung von Flächen: Standortsuche für Deponie o gewünschte Eigenschaften der Zielfläche: wasserundurchlässiger (toniger) Untergrund, festgelegte Entfernung von Siedlungsgebieten, Gewässern, maximales Gefälle Gelände 5 %. o Lösung: Verschneidung der DB- Layer Geologie bzw. Boden, Siedlung (mit Pufferzonen), Gewässer (mit Pufferzonen), Hangneigung ergibt Fläche bzw. verschiedene Flächen mit geforderten Merkmalen: ggf. Fall Selektion optimal geeigneter Fläche anhand weiterer Kriterien Flächenveränderungen (change detection): multitemporale Analyse: z.B. Überlagerung von Flächennutzungen verschiedener Erfassungszeitpunkte Markierung der Veränderung Flächenverschneidung, polygon overlay Befehl „intersect“ Begriff: Verschneidung von Flächen mit Flächen Erzeugung neuer Polygone durch geometrische Überlagerung mehrerer Datenmengen Neuflächen werden Attribute der Ursprungsflächen vererbt Voraussetzungen, z.T. problematisch o Flächendeckung o Einheitlichkeit von Metrik, Maßstab, Genauigkeit o Unabhängigkeit (=keine gemeinsamen Daten) Funktion: wichtige Analysemethode zur Ableitung neuer Informationen aus vorhandenen Datenbeständen 9 Anwendung: Werden z.B. die Großstädte Deutschlands mit den Bundesländern verschnitten, entstehen neue Stadtobjekte, die zusätzliches Attribut (=Namen der Bundesländer) besitzen Grenzen: bei mehrfacher Flächenverschneidung, z.B. von Landnutzung, Bodenarten, Verwaltungsgebieten, Erzeugung sehr vieler neuer Polygone Optionen: Klärung, ob o inhaltliche Generalisierung der Polygone sinnvoll ist Reklassifikation o u.U. entstandene Kleinstflächen realen Flächen entsprechen (Attribute) oder Artefakte aufgrund ungenauer Digitalisierung sind Splitterpolygone (sliver polygon): Tilgung Vektorverschneidung aufwendige Schnittpunktberechung zwischen Polygonlinien Setzen/Tilgen neuer Knoten an Schnittpunkten Aufbau neuer Topologie Erzeugung neuer Attributtabelle mit allen bzw. ausgewählten Attributen der Ausgangsdaten Beispiele für Vektorverschneidungen Punkt mit Fläche, point in polygon Selektion der Punkte innerhalb Polygon gelegenen Punkten werden an eigene Attribute neue Flächenattribute angehängt Identifizierung über Lagebezug Linie mit Fläche, line in polygon Berechnung der Schnittpunkte von Linien mit Flächengrenzen Teilung der Linien an den Flächengrenzen Bildung neuer Linienstücke mit eigener Geometrie und Topologie Anhängen der Flächenattribute an Attributtabelle der Linien Fläche mit Fläche, polygon in polygon Berechnung der Schnittpunkte von Flächengrenzen mit Flächengrenzen Teilung Grenzlinien Bildung neuer neue Polygone, die Attribute durch logische AND-Verbindung von Basis-Polygonen erhalten Zusammenführen aller Flächenattribute in Attributtabelle der Ergebnisfläche Pufferung (Arten von Puffern) Zonenbildung Begriff: Zonenbildung (buffering) Pufferung: Erzeugung von Distanzfläche ( Pufferzone) durch Polygonbildung um Punkt, Linie, Polygon (Flächenrand) grundlegende Funktion räumlicher Analyse Funktion räumliche Abfragen durch Generierung von Distanzflächen o Erzeugung neuer Flächen: Berechnung Zonenkontur für jedes Geoobjekt über konstanten bzw. variablen Abstand (Distanzwert), z.B. Grenzlinie, die 500 m von Ufer eines Flusses entfernt ist o Bestimmung räumlicher Nähe von Objektmerkmalen, z.B. alle Industriegebiete, die unter 5 km von Güterbahnhof entfernt sind häufig genutzte GIS- Analysefunktion 10 Pufferzone, buffer zone Fläche, die um Flächenrand, Linie, Punkt gebildet wird Polygongrenzen in bestimmten Abstand zu Punkt, Linie, Polygon Arten Ausprägungen als Außen- und Innenpuffer (Innerpuffer nur bei Flächen) Punktpuffer(Kreis, Linienpuffer Polygonpuffer Quadrat) Ausprägungen Puffergenerierung mit unterschiedlichen, jeweiliger Fragestellung angepassten Pufferbreiten, ggf. unterschiedlich nach Seiten, Abschnitte spezifische Pufferung: einheitlicher Distanzwert für gesamte selektierte Objektmenge, z.B. Abstand 500 m von Fluss konstanter Linienpuffer unspezifische Pufferung: variabler Distanzwert aus Sachdaten bzw. Ergebnis von Berechnung: z.B. Verkehrsdichte auf Straßenabschnitten variabler Linienpuffer synchrone Pufferung mehrerer Objekte: Eliminierung der Überlappung von Pufferflächen durch Flächenverschmelzung Anwendung/Analyse Puffer nicht nur grafische Darstellungen, sondern Objekte, mit denen Analysen durchgeführt oder die z.B. verschnitten werden können Einfluss Geoobjekt auf Nachbarschaft, z.B. Auswirkungen der Emissionen eines Schornsteins auf Umgebung Einfluss Nachbarschaft auf Geoobjekt, z.B. Eintrag von Nähr-/Schadstoffen eines Fließgewässers über Uferrandstreifen Schachtelung von Pufferzonen um Geoobjekte mit unter-schiedlicher Gewichtung, z.B. verschiedene Schutzzonenkategorien Netzwerkanalysen (kürzester Weg; traveling salesman usw.) Begriff: network analysis Gruppe grundlegender GIS- Funktionen: lineares Pendant zur Flächenverschneidung Funktionen basieren auf Liniennetzen lineare Geoobjekte (Kanten), durch Knoten verbunden, z.B. Straßennetze, Elektrizitätsnetze Ziel Untersuchung, Berechnung von Beziehungen in Liniennetzen: Voraussetzung: Ablage der Netze als planare Graphen, die Nachbarschaftsbeziehungen, aber keine Geometrie abbilden Topologie, Vektor- GIS planare Graphen: Abstraktion zur Analyse verschiedenster Anwendungen mit ähnlichen Methoden Analysen Geometrie: Weglängen im Netzwerk (Minimierungsproblem) 11 Topologie: Verbindungen, Hindernisse (Lücken) im Netzwerk Netzwerkattribute: Eigenschaften von Knoten bzw. Kanten, z.B. Durchflusskapazität von Straßenabschnitten Funktionsgruppen 4 Hauptgruppen der Netzwerkanalyse: o Beste Wege o Bester Standort o Reisendenproblem o Streckenverfolgung Funktionsgruppen Vergleich Beste Wege Bester Standort Reisendenproblem Bester Weg, best path Begriff: Suche des optimalen Weges zwischen 2 Orten (Start-/ Zielpunkt): Funktion der Netzwerkanalyse Randbedingungen: Ermittlung kriterienabhängig, z.B. o geometrisch kürzester Weg Minimumdistanz, räumlich direkte Verbindung o topologisch kürzester Weg Minimum an Knoten, Kanten, Kreuzungsfreiheit, z.B. Autobahn o attributiv kürzester Weg: minimale Widerstandswerte der Kanten, geringster Aufwand kumulativer Kosten schnellste Fahrzeit, geringste Fahrkosten Anwendung: Fahrzeugnavigation, Fahrplanauskunft schnellster, kürzester, (kosten)günstigster Weg Bester Standort, best place Begriff: Suche optimalen Standortes für (geplantes) Objekt, z.B. Schule, Supermarkt, Tankstelle: Funktion der Netzwerkanalyse Erreichbarkeit: Ermittlung der Punkte, die von Zentralpunkt in bestimmtem Zeitraum erreicht werden, z.B. Krankenwagen in vorgeschriebener Zeit vollständige notärtzliche Versorgung eines Raumes Einzugsbereich: 12 Ermittlung, Optimierung des Wegeaufwands der Interessenten/Kunden eines Einzugsbereichs: Randbedingung: Minimierung der absoluten Wegekosten der Kunden Anwendung: Einzugsgebiet, Erreichbarkeit eines Standortes z.B. Standortplanung Reisenden-Problem, travelling salesman problem (TGP) Begriff: Suche des optimalen (schnellsten, kürzesten) Rundreiseweges von Startpunkt zu Startpunkt, auf dem n-Anzahl von Orten in beliebiger Reihenfolge angelaufen werden, ohne einen Ort doppelt zu besuchen: Funktion der Netzwerkanalyse Ziel: Minimierung von Wege-/Zeitkosten Problem: Berechnung kürzester Weg mathematisch einfach, aber zunehmende Anzahl von Orten erhöht Komplexität der Analyse (x-1), z.B. 3 Orte > 2 Rundreisen, 4 Orte > 6 Rundreisen, 5 Orte > 24 Rundreisen, 6 Orte > 120 Rundreisen, 8 Orte =20.160 Rundreisen: Konsequenz: suboptimale Lösungen Anwendung: Logistik, Fahrzeugeinsatz, Tourenplanung Streckenverfolgung, route tracing Begriff: Kontrollsystem zur Überwachung, Steuerung und Prognose von Bewegungen in Netzwerken: Funktion der Netzwerkanalyse Parameter: Richtung, Kapazität, Geschwindigkeit, Konnektivität Anwendung: Analyse von Verkehrsnetzen auf Engstellen Stauprognosen, Verkehrsleitsysteme jeweils Beispiele für praktische Anwendung Rasterverschneidung einfache Flächenzusammenfügung, da alle Daten im gleichen Rasterformat vorliegen Zusammenfassung/Differenzbildung Aufbau neuer Topologie unter Einsatz Boolescher Operatoren Erzeugung neuer Attributtabelle mit alle bzw. ausgewählten Attributen der Ausgangsdaten Möglichkeiten auch für Rasterdaten gegeben Modellierung mit Rastern overlay (spatial Analyst) geht auch mit Rastern Zusammenfügen mit Combine (Spatial Analyst local) Modelle Begriff „Abbildung von für die jeweilige Fragestellung bedeutsamen Teilaspekten der Wirklichkeit zu einem vereinfachten System“ 13 Merkmale Nachbildung der Realwelt (Original) durch Analogien: Texte, mathematische Beziehungen, Abbildungen (graphisch: 2D/ 3D) Modelle stets für bestimmten Anwender, Zweck, Maßstab und Zeitpunkt bestimmt Ergebnis digitales bzw. analoges Raummodell o Primärmodell Objektmodell o Sekundärmodell Karte Methodik Modellierung Modellerzeugung nach Grundsatz sinnvoller Informationsdarstellung durch gedankliche Konzeptionierung sowie praktisch-technische Realisierung bei wechselseitiger Beeinflussung Relevanz Modell „ersetzt“ Original aufgrund der Struktur-/ Funktions- oder Verhaltensanalogien deshalb Erkenntnisgewinnung über Realität am Modell möglich „Die Modellierung bildet die Grundlage für den Aufbau eines GIS(-Projekts) und bestimmt wesentlich dessen Leistungsfähigkeit“ zelluläre Automaten Grundlagen Zellulärer Automaten Ein zellulärer Automat stellt ein Computermodell dar, welches meistens aus einer regelmäßigen Anordnung identischer Zellen besteht. Jede Zelle kann bestimmte Zustände annehmen und steht mit einer definierten Anzahl von Nachbarzellen in Wechselwirkung. Die Grundbestandteile eines solchen Systems, die Zellen und Regeln zur Berechnung des nächsten Zustandes einer Zelle, sind sehr einfach strukturiert, können in ihrem Zusammenwirken jedoch komplexe Systeme hervorbringen. Dabei sind vier Merkmale zu unterscheiden: Das erste ist die Geometrie der Zellenanordnung. Meist verwendet man ein rechtwinkliges Kästchen-Gitter aus identischen Quadraten. Auch drei- oder vierdimensionale Anordnungen lassen sich ohne weiteres konstruieren, allerdings nicht mehr so ohne weiteres veranschaulichen. Als zweites muss festgelegt werden, welche Plätze in einer bestimmten Anordnung als benachbart zu einer beliebigen Zelle gelten. Zwei häufig auftretende Nachbarschaften sind in der Abbildung dargestellt. Turmnachbarschaft Damennachbarschaft benachbarte Kanten benachbarte Ecken 4er- Nachbarschaft 8er- Nachbarschaft von- Neumann- Nachbarschaft Moore- Nachbarschaft Die dritte Kenngröße eines zellulären Automaten ist die Zahl der Zustände pro Zelle. Das vierte und letzte Merkmal, welches vor allen anderen für die Vielfalt im Universum der zellulären Automaten sorgt, ist die Regel, nach welcher der künftige 14 Zustand einer Zelle aus der momentanen Nachbarschafts- Konstellation ermittelt wird (Transition Rule). Zelluläre Automaten finden in der Architektur, im Städtebau und der Geografie zahlreiche Anwendungsmöglichkeiten. Beispiel: Das Nagel-Schreckenberg-Modell (kurz NaSch-Modell) ist ein theoretisches Modell zur Simulation des Straßenverkehrs Mit Hilfe elementarer Regeln liefert es Voraussagen zum Straßenverkehr, insbesondere zur Verkehrsdichte (Autos je Streckenabschnitt) und zum Verkehrsfluss (vorbeifahrende Autos je Zeiteinheit). Das Modell erklärte das erste Mal den Stau aus dem Nichts als Folge von Überreaktionen beim Bremsen der Vorderleute. 15