Berechnung und Optimierung permanenterregter
Werbung

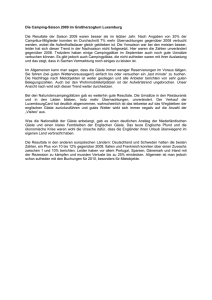
6. Optimierung — Resultate 130 6.2.1. Pareto Menge und weitere Resultate des multikriteriellen Optimierungsproblems, Variante 1 mit Is ≤ 5120 A p´/1 35 60 G Kosten / kEuro 400 Aktiv kbN/1 0.5 0.48 −97 0.46 600 80 500 Kosten / kEuro 400 60 GAktiv / t 0.44 60 GAktiv / t Rf: Is ≤ 5120A η/% −95 0.75 0.7 −97 0.65 600 80 500 Kosten / kEuro 400 Rf: Is ≤ 5120A η/% 3000 2500 −96 2000 −97 600 500 Kosten / kEuro 400 0.8 −96 60 GAktiv / t AJ/A²/(mm²cm) 3500 −95 21 khN/1 80 60 G Aktiv 1500 Thermische Belastung η/% 0.52 80 500 Kosten / kEuro 400 /t −96 21.4 21.2 30 Rf: Is ≤ 5120A 21.6 −96 600 80 500 21.8 −97 η/% 600 Rf: Is ≤ 5120A −95 1000 /t Abbildung 6.15.: Pareto Menge, Variante 1 mit Is ≤ 5120 A Magnethöhe −97 Quotient Nutbreite zu Nutteilung η/% 40 −96 Polpaare s 0.6 Quotient Nuthöhe zu Polteilung Rf: I ≤ 5120A −95 −95 hM/mm 22 45 6.2. Effiziente Menge des multi- bzw. bikriteriellen Optimierungsproblems 131 lFe/m Is/A 4800 60 G Kosten / kEuro 400 Aktiv 2 600 80 500 60 G Kosten / kEuro 400 /t bN/mm N 140 −97 η/% −96 600 Kosten / kEuro 400 80 500 100 Aktiv 30 600 80 60 G 35 −96 −97 120 500 s −95 160 Nuthöhe η/% −95 40 Rf: I ≤ 5120A 180 s 60 G Kosten / kEuro 400 /t Aktiv /t GMagnet/kg −96 −97 4000 600 Kosten / kEuro 400 60 G Aktiv −0.92 −96 −0.93 −97 600 80 500 s −95 η/% 4500 −0.91 Rf: I ≤ 5120A Magnetgewicht η/% −95 cos(φ)/1 5000 Rf: Is ≤ 5120A 60 G Kosten / kEuro 400 Aktiv /t Pv Bδ/T −96 0.96 −97 0.94 500 Kosten / kEuro 400 80 60 GAktiv / t 0.92 300 Rf: I ≤ 5120A s −95 η/% 1 0.98 600 /kW gesamt Luftspaltflussdichte η/% −95 −0.94 80 500 /t Rf: Is ≤ 5120A 1.8 /t Aktiv h /mm Rf: I ≤ 5120A Paketlänge −97 Nutbreite 80 500 2.2 250 −96 −97 200 600 500 Kosten / kEuro 400 80 60 G Aktiv Abbildung 6.16.: Resultate, Variante 1 mit Is ≤ 5120 A /t Gesamtverlust 600 −96 Leistungsfaktor 4900 −97 2.4 s −95 η/% 5000 −96 Rf: I ≤ 5120A Phasenstrom −95 η/% 5100 Rf: Is ≤ 5120A Pv /kW Cu Rf: I ≤ 5120A −96 40 −97 600 35 80 500 Kosten / kEuro 400 60 G Aktiv 250 s −95 η/% 45 Eisenverluste η/% Rf: I ≤ 5120A s −95 200 −96 −97 150 600 80 500 Kosten / kEuro 400 /t 60 G Aktiv /t τf/kN/m² −96 60 −97 55 600 Kosten / kEuro 400 Aktiv 910 −96 −97 900 600 50 80 60 G 80 500 60 G Kosten / kEuro 400 /t 920 s −95 η/% Aktiv U /V s Rf: I ≤ 5120A η/% 695 s −95 −96 690 −97 600 500 Kosten / kEuro 400 80 60 G Aktiv Statorspannung η/% 65 Rf: I ≤ 5120A Kraftdichte s 500 s0 70 Rf: I ≤ 5120A −95 U /V 685 /t Abbildung 6.17.: Resultate, Variante 1 mit Is ≤ 5120 A 890 /t Leerlaufspannung @ Überdrehzahl PvFe/kW 50 Stromwärmeverluste gesamt 6. Optimierung — Resultate 132 6.2. Effiziente Menge des multi- bzw. bikriteriellen Optimierungsproblems 133 6.2.2. Pareto Menge und weitere Resultate des bikriteriellen Optimierungsproblems, Variante 1 mit Is ≤ 5120 A und η ≥ 95% Magnethöhe 23 45 44 43 42 41 395 hM / mm p´ / 1 Polpaare 22 21 395 390 Kosten / kEuro 43.4 43.8 43.6 G /t 390 Kosten / kEuro Aktiv 43.8 43.6 GAktiv / t Rf: Is ≤ 5120A & η ≥ 95% Rf: I ≤ 5120A & η ≥ 95% s Quotient Nutbreite zu Nutteilung Quotient Nuthöhe zu Polteilung 0.7 0.52 0.5 0.48 0.46 0.44 khN / 1 kbN / 1 43.4 0.65 395 395 390 Kosten / kEuro 43.4 43.8 43.6 GAktiv / t 390 Kosten / kEuro Rf: Is ≤ 5120A & η ≥ 95% 43.4 43.8 43.6 GAktiv / t Rf: Is ≤ 5120A & η ≥ 95% AJ / A²/(mm²cm) Thermische Belastung 3200 3000 395 390 Kosten / kEuro 43.4 43.8 43.6 GAktiv / t Rf: I ≤ 5120A & η ≥ 95% s Abbildung 6.18.: Pareto Menge, Variante 1 mit η ≥ 95% und Is ≤ 5120 A als Rf 6. Optimierung — Resultate 134 Paketlänge Fe /m 5300 5200 5100 5000 4900 l Is / A Phasenstrom 1.85 1.8 1.75 1.7 395 395 390 Kosten / kEuro 43.8 43.4 390 Kosten / kEuro 43.6 G /t Aktiv Rf: I ≤ 5120A & η ≥ 95% Rf: Is ≤ 5120A & η ≥ 95% s Nutbreite Nuthöhe 30 bN / mm h / mm 120 N 115 110 395 28 26 395 43.8 390 Kosten / kEuro 43.4 43.6 GAktiv / t 390 Kosten / kEuro Rf: Is ≤ 5120A & η ≥ 95% 43.8 43.6 GAktiv / t s Leistungsfaktor 3800 cos(φ) / 1 GMagnet / kg 43.4 Rf: I ≤ 5120A & η ≥ 95% Magnetgewicht 3600 0.96 0.94 0.92 0.9 0.88 3400 395 395 390 Kosten / kEuro 43.8 43.4 390 Kosten / kEuro 43.6 G /t Aktiv 43.4 43.8 43.6 GAktiv / t Rf: I ≤ 5120A & η ≥ 95% Rf: Is ≤ 5120A & η ≥ 95% s Luftspaltflussdichte Gesamtverlust / kW 1.05 290 gesamt 1 δ B /T 43.8 43.6 GAktiv / t 43.4 Pv 0.95 280 270 395 395 390 Kosten / kEuro 43.8 43.4 43.6 G /t Aktiv Rf: Is ≤ 5120A & η ≥ 95% 390 Kosten / kEuro 43.4 43.8 43.6 GAktiv / t Rf: Is ≤ 5120A & η ≥ 95% Abbildung 6.19.: Resultate, Variante 1 mit η ≥ 95% und Is ≤ 5120 A als Rf 6.2. Effiziente Menge des multi- bzw. bikriteriellen Optimierungsproblems Stromwärmeverluste gesamt Cu / kW 35 34 33 32 31 395 Pv PvFe / kW Eisenverluste 255 250 245 240 235 395 43.8 390 Kosten / kEuro 43.4 390 Kosten / kEuro 43.6 GAktiv / t 43.4 43.8 43.6 GAktiv / t Rf: Is ≤ 5120A & η ≥ 95% Rf: I ≤ 5120A & η ≥ 95% s Kraftdichte Leerlaufspannung @ nmax s0 /V 72 70 68 66 U τf / kN/m² 135 395 940 920 900 880 860 395 43.8 390 Kosten / kEuro 43.4 43.6 G /t Aktiv 390 Kosten / kEuro 43.4 43.8 43.6 GAktiv / t Rf: Is ≤ 5120A & η ≥ 95% Rf: I ≤ 5120A & η ≥ 95% s Statorspannung 700 s U /V 720 680 660 395 390 Kosten / kEuro 43.4 43.8 43.6 GAktiv / t Rf: Is ≤ 5120A & η ≥ 95% Abbildung 6.20.: Resultate, Variante 1 mit η ≥ 95% und Is ≤ 5120 A als Rf 6. Optimierung — Resultate 136 6.3. Auswahl und Auslegung des optimalen Generators anhand der Optimierungsresultate Der fiktive Auftraggeber des Windkraftanlagenprojektes entscheidet sich, dass ein Nennwirkungsgrad von η = 95% für den Generator ausreichend ist. Aus Abbildung 6.14 auf Seite 129 ist ersichtlich, dass die Einsparung in Generatorkosten zwischen Variante 1 und 2 so groß ist, dass der finanzielle Mehraufwand für den Umrichter-Überspannungsschutz gerechtfertigt ist. In Abbildung 6.5 auf Seite 124 ist die effiziente Menge der bikriteriellen Optimierung für Variante 1 bei η ≥ 95% und Is ≤ 5120 A dargestellt. Daraus kann entnommen werden, dass unterhalb einem Gewicht der aktiven Massen von GAktiv ≤ 43, 5 t die Kosten sehr stark ansteigen. Kosten / kEuro 400 395 p´=40 p´=42 p´=44 p´=45 p´=48 p´=opti 390 385 43 43.5 44 GAktiv / t 44.5 45 Abbildung 6.21.: Effiziente Menge des bikriteriellen Optimierungsproblems bei unterschiedlichen Polpaarzahlen Man entscheidet sich, dieses Gewicht als Grenze zu nehmen. Aus Abbildung 6.18 kann man entnehmen, dass die optimale Polpaarzahl bei p′ ≈ 43 liegt. In Abschitt 5.2 wurde geschrieben, dass es bei der Wahl der Polpaarzahl darauf ankommt, nicht nur eine ganze Anzahl zu wählen, sondern eine Polpaarzahl mit möglichst vielen Teilern, damit man bei der Verschaltung der Wicklung flexibel ist. Eine naheliegende ganzzahlige Polpaarzahl, die mehr Teiler als p′ = 43 hat, ist z.B. p′ = 42 bzw. p′ = 44. Damit wäre es möglich, bei der Verschaltung der Wicklung 2, 6, 7 oder 21 bzw. 2, 4, 11 oder 22 parallele Zweige zu bilden. Eine gern gewählte Polpaarzahl bei dieser Art Generatoren ist p′ = 48, da sich damit besonders viele Verschaltungsmöglichkeiten ergeben. Durch Festlegung der oberen und unteren Schranke von Parameter p′ des Parametervektors ~x auf eine bestimmte Polpaarzahl 6.3. Auswahl und Auslegung des optimalen Generators anhand der Optimierungsresultate137 (z.B. p′ = 44) kann der Parameterraum von R 5 auf R 4 verkleinert werden. Wie sich die Wahl zwischen verschiedenen Polpaarzahlen auf die effiziente Menge auswirkt, kann aus Abbildung 6.21 entnommen werden. Die mit opti gekennzeichnete Linie ist die effiziente Menge, bei der die Polpaarzahl im Parametervektor enthalten war. Die Wahl der Polpaarzahl kann man letztendlich anhand der zu realisierenden Windungszahl treffen. Abbildung 6.22 zeigt die Leiterzahl je Strang für die Paretooptimalen Generatoren mit der Polpaarzahl p′ = 42 bzw. p′ = 44. Für GAktiv = 43, 5 t ist die geforderte Leiterzahl je Strang bei beiden Varianten Z ≈ 105. Dies kann mit der in Tabelle 6.5 aufgeführten Verschaltungsweise realisiert werden. Die Wahl fällt auf p′ = 44 mit einer Anzahl von parallelen Zweigen ap = 22 und einer Anzahl der Leiter in beiden Lagen der Nut zNut = 26. Damit erhält man eine Leiterzahl je Strang ZStrang = 104, bzw. eine Windungszahl WStrang = 52. Tabelle 6.6 gibt die Parameter und Generatorkenngrößen des ausgewählten optimalen Generators wieder. Leiterzahl je Strang 110 110 105 105 Z/1 Z/1 Leiterzahl je Strang 100 95 394 392 390 388 Kosten / kEuro 43.8 43.6 GAktiv / t 44 100 95 395 390 Kosten / kEuro Rf: Is ≤ 5120A & η ≥ 95% 43.4 43.8 43.6 GAktiv / t Rf: Is ≤ 5120A & η ≥ 95% p′ = 42 p′ = 44 Abbildung 6.22.: Leiterzahl je Strang für Polpaarzahl p′ = 42 bzw. p′ = 44 42 Polpaare Anzahl paralleler Zweige ap Anzahl Leiter in beiden Lagen der Nut zNut 44 Polpaare Anzahl paralleler Zweige ap Anzahl Leiter in beiden Lagen der Nut zNut 2 2,5 6 7,5 7 8,75 21 26,3 2 2,4 4 4,8 11 13,1 22 26,3 Tabelle 6.5.: Wicklungsentwurf Damit steht die optimale Blechschnittgeometrie fest. Die reale Blechschnittgeometrie richtet sich letztendlich nach den zur Verfügung stehenden Profildrahtgrößen, mit denen die Formspule aufgebaut wird. Tabelle A.2 auf Seite 175 im Anhang zeigt 6. Optimierung — Resultate 138 Parameter Polpaare p′ Quotient Nutbreite zu Nutteilung kbN Quotient Nuthöhe zu Polteilung khN Magnethöhe hMag Thermische Belastung A·J Generatorkenngrößen elektrische Nennleistung Pel Nenndrehzahl nN Luftspaltdurchmesser Dsi Luftspaltweite δ Paketlänge lFe Nuthöhe hN Nutbreite bN Windungszahl WStrang Magnetgewicht GMagnet Gewicht aktive Massen GAktiv Kraftdichte τf Leerlaufspannung @ Überdrehzahl Us0 Statorspannung Us Phasenstrom Is Leistungsfaktor cos(ϕ) Luftspaltflussdichte Bδ Eisenverluste P vFe Stromwärmeverluste gesamt P vCu Gesamtverlust P vgesamt Nennwirkungsgrad @ nN ηN Teillastwirkungsgrad @ 1/4 PN & n = 7, 2 min−1 η1/4 Teillastwirkungsgrad @ 1/2 PN & n = 11 min−1 η1/2 Teillastwirkungsgrad @ 3/4 PN & n = nN η3/4 Kosten Kosten 44 0, 48 0, 685 22 mm 3183 A2/( cm mm2 ) 5, 3 MW 12 min−1 4800 mm 6 mm 1, 75 m 117, 3 mm 27, 4 mm 52, 1 3567, 4 kg 43, 5 t 69, 9 kN/ m2 896 V 690 V 5120 A −0, 91 0, 99 T 33, 6 kW 245, 4 kW 279 kW 95% 95, 6% 96, 3% 95, 9% 389,6 kEuro Tabelle 6.6.: Parameter und Generatorkenngrößen des ausgewählten optimalen Generators 6.3. Auswahl und Auslegung des optimalen Generators anhand der Optimierungsresultate139 die gewählten Größen und Tabelle 6.7 gibt die Abmessungen der Generatorgeometrie wieder. Das FE-Modell des somit ausgewählten Generatorblechschnittes ist in Abbildung 6.23 dargestellt. Abbildung 6.23.: FE-Modell des optimalen Entwurfs Weitere Parameter des ausgewählten optimalen Generators sind im Anhang A.4 dargestellt. 6. Optimierung — Resultate 140 Hauptabmessungen Rotorinnendurchmesser Mechanischer Rotordurchmesser am Luftspalt Wellendurchmesser Rotor Durchmesser Magnet innen Statoraußendurchmesser Statorinnendurchmesser = Luftspaltdurchmesser Blechpaketlänge Luftspaltweite Statorgeometrie Nutbreite Nutöffnung Nuthöhe Höhe Streusteg Statornut Polteilung Stator Nutteilung Nuttiefe (Luftspalt-Nutboden) Massen&Gewichte Magnetgewicht Gewicht des Statorrückens Gewicht der Statorzähne Gewicht des Rotorrückens Kupfergewicht Masse des aktiven Generatorteils Moment&Leistung Drehzahl max. Überdrehzahl mechanisches Nennmoment mechanische Leistung elektrische Wirkleistung elektrische Blindleistung elektrische Scheinleistung Betrag Leistungsfaktor Nennwirkungsgrad DRi DRMech DRw DRMag DSa DSi lFe δ 4856 mm 4812 mm 4936 mm 4812 mm 4466 mm 4800 mm 1750 mm 6 mm bN bö hN hS τP τN hNeff 27, 4 mm 27, 4 mm 115 mm 2 mm 171, 36 mm 57, 12 mm 117 mm GMagnet GRS GZS GRR GCu GAktiv 3408 kg 9272 kg 11437 kg 8290 kg 10034 kg 42441 kg n nmax MN Pmech Pel Qel Sel cos ϕ ηn 12 min−1 16, 2 min−1 −4446, 6 kN m −5587, 8 kW −5300 kW 2733, 4 kV A 5963, 4 kV A −0, 889 94, 9% Tabelle 6.7.: Abmessungen der Generatorgeometrie und Moment&Leistung des ausgewählten optimalen Generators 6.3. Auswahl und Auslegung des optimalen Generators anhand der Optimierungsresultate141 Zeigergrößen Statorfrequenz Stromflusswinkel Phasenwinkel Polradwinkel Polradspannung Polradspannung Betrag ind. Strangspannung (2D Streuung) ind. Strangspannung (2D Streuung) Betrag Hauptfeldspannung Hauptfeldspannung Betrag Statorspannung Statorspannung Betrag Statorstrom Statorstrom Betrag Winkel q-Achse auf Us Winkel q-Achse auf Up Winkel q-Achse auf Ui Winkel q-Achse auf Uh Statorstromdichte Thermische Belastung Nutstrom Statorstrombelag fs ψ ϕ θ Up Up USi2D USi2D Uh Uh Us Us Is Is φUs φUp φUs φUh JSN A·J INut As 8, 8 Hz 170° 207, 3° −40, 8° (−23, 2 + i381, 6) V 382, 3 V (234, 6 + i324, 3) V 400, 3 V (101, 6 + i351, 1) V 365, 5 V (234, 86 + i308, 5) V 387, 7 V (−890, 3 − i5048, 9) A 5126, 8 A −37, 3° 3, 5° −35, 9° −19, 7° 3, 01 A/ mm2 3193 A2/( cm mm2 ) 6059 A 1060, 7 A/ cm Tabelle 6.8.: Zeigergrößen des ausgewählten optimalen Generators 6. Optimierung — Resultate 142 6.4. Verlustberechnung Die Verluste, die in dem optimalen Generator anfallen, sind in Tabelle 6.9 dargestellt. Dabei machen die Stromwärmeverluste 82,8 %, die Eisenverluste 14,6% und die Rotorverluste 2,6 % der Gesamtverluste aus. Details zu den Verlustberechnungen werden in Abschnitt 6.4.1 bis 6.4.3 aufgeführt. Ummagnetisierungsverluste Klassische semiempirische Methode Hystereseverluste (Hauptfluss) in Statorzähnen Pv,Fe,Z,H Wirbelstromverluste (Hauptfluss) in Statorzähnen Pv,Fe,Z,WS Wirbelstromverluste (Oberwellen Polradfeld) in Stator- Pv,Fe,Z,WS,P zähnen Verluste in den Zähnen Pv,Fe,Z Hystereseverluste (Hauptfluss) im Statorrücken Pv,Fe,J,H Wirbelstromverluste (Hauptfluss) im Statorrücken Pv,Fe,J,WS Wirbelstromverluste (Oberwellen Polradfeld) in Stator- Pv,Fe,J,WS,P zähnen Verluste im Statorrücken Pv,Fe,J Eisenverluste im Ständer Pv,Fe Finite-Elemente-Methode Verluste in den Zähnen Pv,Fe,Z Verluste im Statorrücken Pv,Fe,J Eisenverluste im Ständer Pv,Fe Rotorverluste Magnet-Wirbelstromverluste Pv,Mag Rotor-Wirbelstromverluste Pv,rJ Faktor für tangentiale Magnetunterteilung ξMag,t Verluste Stromwärmeverluste PvCu gesamte Statorverluste Pv,s gesamte Rotorverluste Pv,r Reibungsverluste PvR Reibungskoeffizient krb gesamte Verluste Pv 21, 5 kW 3, 6 kW 3, 5 kW 28, 5 kW 10, 7 kW 1, 8 kW 1, 0 kW 13, 4 kW 42, 0 kW 23, 9 kW 11, 7 kW 35, 6 kW 5, 6 kW 1, 8 kW 1 238, 5 kW 280, 5 kW 7, 4 kW 0, 2 kW W 2, 5 s2 m m3 288, 1 kW Tabelle 6.9.: Verluste des ausgewählten optimalen Generators 6.4.1. Berechnung der Stromverdrängung Die Erhöhung des Gleichstromwiderstandes durch Stromverdrängung 1. und 2. Ordnung beträgt 1,4 %. Die Berechnungsfaktoren dafür sind in Tabelle 6.10 angegeben. Die dazugehörigen Berechnungsformeln finden sich im Anhang A.1. Die Stromver- 6.4. Verlustberechnung 143 drängung fällt aufgrund der kleinen Frequenz sehr niedrig aus. Den größten Beitrag wird durch die Stromverdrängung in den einzelnen Teilleitern verursacht. Stromverdrängung Stromverdrängungsfaktor Widerstand Faktor für reduzierte Leiterhöhe aufgrund SVD 1. Ordnung (Schlingströme) Faktor für reduzierte Leiterhöhe aufgrund SVD 2. Ordnung (in jedem Teilleiter) Stromverdrängungskomponente für SVD 1. Ordnung (Schlingströme) Stromverdrängungskomponente ungesehnt für SVD 2. Ordnung (in jedem Teilleiter) Stromverdrängungsfaktor Widerstand für SVD 1. Ordnung (Schlingströme) Stromverdrängungsfaktor Widerstand für SVD 2. Ordnung (in jedem Teilleiter) Stromverdrängungsfaktor Widerstand ungesehnt für SVD 2. Ordnung (in jedem Teilleiter) Stromverdrängungsfaktor Widerstand gesehnt für SVD 2. Ordnung (in jedem Teilleiter) kr βSVD 1,014 0,106 ξSVD 0,117 LSVD 42 LSVDu 225 kr1 1,002 kr2 1,014 kr2u 1,014 kr2g 1 Tabelle 6.10.: Stromverdrängungsfaktor für den ausgewählten optimalen Generator 6.4.2. Berechnung der Eisenverluste Für die Berechnung der Eisenverluste wurden die in Tabelle 6.11 angegebenen Kenngrößen verwendet und die Berechnung des Generators erfolgte mit fünf Schrägungssegmenten. Die Eisenverluste wurden für Nennbetrieb und für Leerlauf berechnet. Für die Leerlaufberechnung muss die Schrägung nicht berücksichtigt werden, da in jedem Segment die gleichen Verluste anfallen. Bei der in Abschnitt 2.2.3 vorgestellten Methode, die die Eisenverluste je Element aus den Resultaten der FEMagnetkreisberechnung bestimmt, werden die Verluste für jedes Schrägungssegment ermittelt. Die Summe der Verluste wird in Tabelle 6.12 und 6.13 getrennt für Zähne und Rotorjoch (Pv,Fe,Z und Pv,Fe,J ) mit den klassisch semiempirisch bestimmten Verlusten (nach Gleichung A.13 auf Seite 164) verglichen und die Differenz ∆ in Prozent, bezogen auf die FE-Methode, dargestellt. Bei beiden Methoden wurden die Baufaktoren für Joch und Zähne auf 2 gesetzt, um die Ergebnisse vergleichen zu können. Die vorgestellte FE-Methode kann diese Korrekturfaktoren nicht ersetzen, da Zusatzverluste, wie sie an den Stanzrändern entstehen, nicht berücksichtigt werden. 6. Optimierung — Resultate 144 Eisenfüllfaktor Blechstärke Dichte des Blechmaterials Exponent für Ummagnetisierung spezifische Wirbelstromverluste im Eisen spezifische Hystereseverluste im Eisen Baufaktor für Wirbelstromverluste im Statorjoch Baufaktor für Hystereseverluste im Statorjoch Baufaktor für Wirbelstromverluste in den Statorzähnen Baufaktor für Hystereseverluste in den Statorzähnen Referenzflussdichte für Ummagnetisierung Referenzfrequenz für Ummagnetisierung Referenzblechstärke für Ummagnetisierung kFe sBlech ρFe alp σWS σH kJ,WS kJ,H kZ,WS kZ,H Bref fref sBlechref 0, 97 0, 65 mm 7, 7 kg/ dm3 2 1.825 W/ kg 3.25 W/ kg 2 2 2 2 1.5 T 50 Hz 0.5 mm Tabelle 6.11.: Kenngrößen für verwendetes Elektroblech Jedoch kann mit dieser Methode der Feldverlauf und der Grad der Eisensättigung berücksichtigt werden, was bei der klassischen semiempirischen Methode nicht möglich ist. @ PN Pv,Fe,Z spezifisch Pv,Fe,J spezifisch kW kW/ kg kW kW/ kg Seg 1 3,26 1,43 1,34 0,72 Seg 2 3,96 1,74 1,81 0,98 FE Methode Seg 3 Seg 4 Seg 5 4,76 5,58 6,34 2,09 2,45 2,79 2,35 2,86 3,31 1,27 1,54 1,79 P 23,9 2,10 11,69 1,26 klass. 28,5 2,49 13,4 1,45 ∆ 19% 15% Tabelle 6.12.: Eisenverluste bei Nennleistung @ Leerlauf Pv,Fe,Z kW spezifisch kW/ kg Pv,Fe,J kW spezifisch kW/ kg FE-Methode 23,1 2,03 9,9 1,07 klass. 25,5 2,23 8,5 0,92 ∆ 10% -14% Tabelle 6.13.: Eisenverluste bei Leerlauf Abbildung 6.24 zeigt die mit der FE-Methode ermittelten Verlustdichten in den Elementen des FE-Modells im Leerlauf. Man erkennt, dass in den Zähnen hohe Verlustdichten zu finden sind, da dort auch die Flussdichte am höchsten ist (Abbildung 6.29 auf Seite 148)2 . Zusätzlich erkennt man, dass im Zahnkopf die höchsten 2 Die Zähne sind in Jochnähe durch die hohe Flussdichte stark gesättigt. Da diese Sättigung jedoch nur über einen Teil des Zahnes stattfindet, ist der damit zu erbringende Magnetisie- 6.4. Verlustberechnung 145 Verlustdichten erreicht werden. Dies hat neben der hohen Flussdichte seine Ursache im Korrekturfaktor KF1 , der die Wirbelstromzusatzverluste durch die Minor Loops innerhalb der Hystereseschleife (Abbildung 6.26) berücksichtigt und in der Summe der Korrekturfaktoren KF2l + a · KF2q , welche die Hysteresezusatzverluste durch die Minor Loops innerhalb der Hystereseschleife (Abbildung 6.27) berücksichtigt. Die resultierende Erhöhung der Zusatzverluste wird durch die Multiplikation KF1 · (KF2l + a · KF2q ) berechnet (siehe Abbildung 6.25). Weiterhin sieht man, dass im Eisen am Übergang von Zahn zu Joch erhöhte Verluste auftreten, deren Ursache auch in den Korrekturfaktoren liegt. Abbildungen 6.30 und 6.31 zeigen die radiale und tangentiale Komponente der Flussdichte (Grundwelle). Man sieht deutlich, dass in den Zähnen die Grundwelle der Flussdichte eine reine Wechselmagnetisierung erzeugt. Dies spiegelt sich auch im Achsenverhältnis a der Flussdichte in Abbildung 6.28 wider. An der Stelle, wo der Zahn in das Joch übergeht, erzeugt die Grundwelle der Flussdichte eine reine Drehmagnetisierung, was in einem Achsenverhältnis von a = 1 widergespiegelt wird. 1 MN MX ANSYS 10.0 JAN 11 2006 13:29:03 PLOT NO. 1 ELEMENT SOLUTION SUB =1 TIME=.568182 PV (NOAVG) SMX =3.504 0 .2 .4 .6 .8 1 1.2 1.4 1.6 1.8 W/kg Abbildung 6.24.: OptiRes_Leerlauf : Verlustdichten in W/ kg durch Ummagnetisierung im Ständereisen rungsaufwand vertretbar. Bei der Optimierungsrechnung wurde der Magnetisierungsaufwand mit berücksichtigt, da die nichtlineare Magnetkreisberechnung den Sättigungseffekt des Eisens nachbildet 6. Optimierung — Resultate 146 1 MN MX ANSYS 10.0 JAN 16 2006 15:35:59 PLOT NO. 1 ELEMENT SOLUTION SUB =1 TIME=.568182 WS (NOAVG) SMX =4.438 0 1 1.5 2 2.5 3 3.5 4 4.5 Abbildung 6.25.: OptiRes_Leerlauf : Produkt der Korrekturfaktoren KF1 · (KF2l + a · KF2q ) zur Berücksichtigung der Minor Loops innerhalb der Hystereseschleife 1 MN MX ANSYS 10.0 JAN 16 2006 14:59:03 PLOT NO. 1 ELEMENT SOLUTION SUB =1 TIME=.568182 WS (NOAVG) SMX =2.839 0 1 1.25 1.5 1.75 2 2.25 2.5 2.75 Abbildung 6.26.: OptiRes_Leerlauf : Korrekturfaktor KF1 für Wirbelströme 6.4. Verlustberechnung 147 1 ANSYS 10.0 JAN 16 2006 15:38:09 PLOT NO. 1 ELEMENT SOLUTION SUB =1 TIME=.568182 WS (NOAVG) SMX =1.935 0 1 1.2 1.4 1.6 1.8 2 MN MX Abbildung 6.27.: OptiRes_Leerlauf : Korrekturfaktor KF2l + a · KF2q für Hysterese 1 ANSYS 10.0 JAN 11 2006 13:39:40 PLOT NO. 1 ELEMENT SOLUTION SUB =1 TIME=.568182 A1 (NOAVG) SMX =.927788 0 .125 .25 .375 .5 .625 .75 .875 1 MN MX Abbildung 6.28.: OptiRes_Leerlauf : Achsenverhältnisse a der Flussdichte 6. Optimierung — Resultate 148 1 MN MX ANSYS 10.0 JAN 11 2006 13:45:45 PLOT NO. 1 ELEMENT SOLUTION SUB =1 TIME=.568182 BELEM (NOAVG) SMX =3.03 0 .25 .5 .75 1 1.25 1.5 1.75 2 2.25 T Abbildung 6.29.: OptiRes_Leerlauf : Betrag der Flussdichte (Grundwelle) 1 MN MX ANSYS 10.0 JAN 11 2006 13:43:11 PLOT NO. 1 ELEMENT SOLUTION SUB =1 TIME=.568182 BELEM (NOAVG) SMX =2.19 0 .25 .5 .75 1 1.25 1.5 1.75 2 2.25 T Abbildung 6.30.: OptiRes_Leerlauf : x-Komponente der Flussdichte (Grundwelle, tangential) 6.4. Verlustberechnung 149 1 MN MX ANSYS 10.0 JAN 11 2006 13:44:39 PLOT NO. 1 ELEMENT SOLUTION SUB =1 TIME=.568182 BELEM (NOAVG) SMX =2.098 0 .25 .5 .75 1 1.25 1.5 1.75 2 2.25 T Abbildung 6.31.: OptiRes_Leerlauf : y-Komponente der Flussdichte (Grundwelle, radial) 6.4.3. Berechnung der Rotorverluste Die Rotorverluste berechnen sich nach der in Abschnitt 2.2.3 beschriebenen Methode. Dabei wurde für die Permeabilität des Rotorjochs (µ4 aus Modell in Abbildung 2.17 auf Seite 25) die mittlere Permeabilität des Rotoreisens µr,Jm = 830 aus der FE-Berechnung eingesetzt. Die Harmonischen der Luftspaltflussdichte, die eine Relativbewegung zum Rotor ausführen, sind im Anhang in Tabelle A.5 auf Seite 178 aufgelistet. Da das Luftspaltflussdichtespektrum für jede Rotorposition unterschiedlich ist, wurden die Fourierkoeffizienten über alle Rotorpositionen gemittelt. Diese Spektren, abhängig von der Rotorposition (hier 64 Positionen) sind in Abbildung 6.32 zu sehen. Die erste Säule, insofern sie zu sehen ist, stellt den Mittelwert dar. Wurde der Generator mit mehreren Schrägungssegmenten berechnet, so erfolgt eine weitere Mittelwertbildung. Abbildung 6.33 zeigt die gemittelten Fourierkoeffizienten für Leerlauf und Nennlast. Die dazugehörigen Zeitverläufe (gesamte Luftspaltflussdichte und Anteil mit Relativbewegung) ist in Abbildung 6.34 für eine Rotorposition zu sehen. Die Ergebnisse der Verlustberechnung für Leerlauf und Nennlast sind in Tabelle 6.14 aufgeführt. 6. Optimierung — Resultate 150 Pv / kW Magnete Rotorjoch @ Pn 5,6 1,8 @ Leerlauf 4,6 1,4 Tabelle 6.14.: Rotorverluste bei Nennbetrieb und Leerlauf Abbildung 6.32.: Fourierkoeffizienten der Luftspaltflussdichte mit Relativbewegung zum Rotor bei 64 Rotorpositionen über eine Nutteilung 0,25 Leerlauf Pn 0,20 B/T 0,15 0,10 0,05 0,00 0 3 6 9 12 15 18 21 24 Ordnung Abbildung 6.33.: Fourierkoeffizienten der Luftspaltflussdichte mit Relativbewegung zum Rotor 6.5. Kurzschlussberechnung und Entmagnetisierung 151 1,5 1,0 Leerlauf, Bl Leerlauf, Bl,harm Pn, Bl Pn, Bl,harm B/T 0,5 0,0 0 60 120 180 240 300 360 g/° -0,5 -1,0 -1,5 Abbildung 6.34.: Luftspaltflussdichte im Leerlauf und Nennbetrieb Pn (Bl ) und Anteil, der sich relativ zum Läufer bewegt (Bl,harm ) 6.5. Kurzschlussberechnung und Entmagnetisierung Bei der Durchführung der FE-Parametervariationsrechnung wurden die Generatorgeometrien nicht auf Entmagnetisierungsfestigkeit oder maximales Kurzschlussmoment überprüft, da dies zu rechenzeitintensiv gewesen wäre. Zur Überprüfung wird in einer transienten FE-Berechnung aus dem Nennleistungsbetrieb ein 2- und 3phasiger Kurzschluss durchgeführt. Die Ergebnisse aus diesen Berechnungen sind in Tabelle 6.15 und Abbildungen 6.35 bis 6.40 dargestellt. Das maximale Kurzschlussmoment tritt beim 2-phasigen Kurzschluss aus dem Nennbetrieb auf und beträgt Mk,max = 8526, 6 kN m. Damit ist Mk,max < 2 · MN und unterschreitet damit die Anforderung aus der Spezifikation (Tabelle 6.2 auf Seite 118). Dies hat sehr große Vorteile für die Auslegung der mechanischen Konstruktion (z.B. Flansche, Schrauben etc.), da diese sich nach dem maximalen Moment richten3 . Bei nicht permanenterregeten Maschinen beträgt das maximale Kurzschlussmoment, abhängig vom Dämpferkäfig, bis zum 10fachen des Nennmoments. Die maximale Belastung des Magnetmaterials bei Betriebstemperatur wird im 3phasigen Kurzschluss aus dem Nennbetrieb erreicht und beträgt H = 1061, 9 kA/ m. Damit ist auch die Entmagnetisierungsfestigkeit gewährleistet, da die Koerzitivfeldstärke des Magnetmaterials bei Betriebstemperatur HcJ = 1108, 6 kA/ m beträgt. Es sei angemerkt, dass diese Grenze hier nur knapp eingehalten wird4 . Daher ist es sehr Noch wichtiger als das maximale Moment ist bei der Auslegung jedoch die Resonanzlage des Wellenstrangs. 4 Die Auslegung ist damit sehr kritisch. Um mehr Sicherheit zu spendieren, sollte das Verhält- 3 6. Optimierung — Resultate 152 wichtig, dass die Betriebstemperatur eingehalten wird, da der Temperatureinfluss auf die Koerzitivfeldstärke sehr stark ist. Der maximale Kurzschlussstrom tritt beim 3-phasigen Kurzschluss aus dem Nennbetrieb auf und beträgt mit Imax = 20, 7 kA ungefähr das 2,8-fache der Amplitude des Nennstromes. Dies ist im Vergleich zu nicht permanenterregten Maschinen sehr gering und hat Vorteile für die Wicklungsbeanspruchung, besonders der Wickelköpfe und für die Verkabelung des Generators. Der Zeitpunkt des Kurzschlusses wurde bei den Kurzschlussrechnungen jeweils auf den Spannungsnulldurchgang einer Phase gelegt, da in diesem Fall sowohl das maximale Kurzschlussmoment als auch der maximale Kurzschlussstrom maximal werden. Mk,max / kN m Hmax / kA m Imax / kA 2-phasig, Pn 8526,6 1034,3 16,9 3-phasig, Pn 7275,5 1061,9 20,7 Tabelle 6.15.: Maximalwerte bei 2- und 3-phasigem Kurzschluss aus Nennleistung nis Nuthöhe zu Polteilung khN vergrößert werden. Damit wird die Nutstreuung vergrößert, welche im Kurzschlussfall das entmagnetisierende Feld verkleinert. Die Maßnahme der Erhöhung der Magnethöhe ist ungünstig, da sich damit der effektive Luftspalt vergrößert und die Synchronreaktanz sich verkleinert. Dies bewirkt einen höheren Kurzschlussstrom und demzufolge ein größeres Gegenfeld. Das Mindestverhältnis von Nuthöhe zu Polteilung kann in der Optimierungsrechnung als Restriktion eingesetzt werden. Das Mindestverhältnis kann schrittweise vergrößert und anschließend ein optimaler Entwurf ausgewählt werden, welcher auf seine Entmagnetisierfestigkeit untersucht wird. Die Auswirkungen dieser Maßnahme auf den Entwurf sind eine höhere Polpaarzahl und größere Eisenlänge, welche sich in den Kosten und im Gesamtgewicht bemerkbar macht. 6.5. Kurzschlussberechnung und Entmagnetisierung 153 9000 6000 M / kNm 3000 0 0,0 0,1 0,2 0,3 0,4 0,5 0,6 -3000 t/s -6000 Abbildung 6.35.: Generatormoment bei 2-phasigem Kurzschluss nach Nennleistung 9000 6000 M / kNm 3000 0 0,0 0,1 0,2 0,3 0,4 0,5 0,6 -3000 t/s -6000 Abbildung 6.36.: Generatormoment bei 3-phasigem Kurzschluss nach Nennleistung 6. Optimierung — Resultate 154 1200 1000 H / kA/m 800 600 400 200 0 0,0 0,1 0,2 0,3 t/s 0,4 0,5 0,6 Abbildung 6.37.: Maximal auftretende magnetische Feldstärke im Permanentmagnet bei 2-phasigem Kurzschluss nach Nennleistung 1200 1000 H / kA/m 800 600 400 200 0 0,0 0,1 0,2 0,3 t/s 0,4 0,5 0,6 Abbildung 6.38.: Maximal auftretende magnetische Feldstärke im Permanentmagnet bei 3-phasigem Kurzschluss nach Nennleistung 6.5. Kurzschlussberechnung und Entmagnetisierung 155 20 I1 I2 I3 15 10 Is / kA 5 0 0,0 0,1 0,2 0,3 0,4 0,5 0,6 -5 -10 -15 t/s -20 Abbildung 6.39.: Generatorstrom bei 2-phasigem Kurzschluss nach Nennleistung 20 I1 I2 I3 15 10 Is / kA 5 0 0,0 0,1 0,2 0,3 0,4 0,5 0,6 -5 -10 -15 -20 -25 t/s Abbildung 6.40.: Generatorstrom bei 3-phasigem Kurzschluss nach Nennleistung 6. Optimierung — Resultate 156 6.6. Interpretation der Optimierungsresultate Tabelle 6.16 gibt die Bereiche an, in denen die Parameter und charakteristische Generatorkenngrößen bei den oben beschriebenen Optimierungsszenarien variieren. Für Variante 1 mit Is ≤ 5120 A, aus der der optimierte Generator aus Abschnitt 6.3 ausgewählt wurde, sollen hier nun die Optimierungsresultate (siehe Abbildungen 6.15 bis 6.17) interpretiert werden. • Die Magnethöhe befindet sich fast im gesamten Bereich der Pareto Menge an ihrer oberen Grenze, welche aus konstruktiven Gründen festgelegt wurde. Dies wird unter anderem durch die Kostenfunktion beeinflusst. Je stärker die Kosten von den Materialkosten der Permanentmagnete dominiert werden, desto mehr wird sich die optimale Magnethöhe verringern. • Der Quotient Nutbreite/Nutteilung kbN variiert zwischen 0,44 – 0,53. Über die Länge der effizienten Menge sind alle kbN dieses Intervalls möglich. Betrachtet man jedoch die Nutbreite bN , welche sich zwischen 25 – 41 mm bewegt, so tendiert diese zu kleinen Nutbreiten für niedrige Kosten, niedriges Gewicht und niedrigen Wirkungsgrad. Dies liegt an der Anzahl der Polpaare, die in diesem Bereich zu großen Werten tendiert. • Der Quotient Nuthöhe/Polteilung khN variiert zwischen 0,6 – 0,83 und tendiert zu kleinen Werten für niedrige Kosten, niedriges Gewicht und niedrigen Wirkungsgrad. Das selbe gilt für die Nuthöhe hN , welche sich im Bereich von 100 – 190 mm bewegt. Der Grund dafür ist in der Reduzierung des Zahngewichts und des Kupfergewichts zu finden, welches sich sowohl auf die Zielfunktion Kosten als auch auf das Gesamtgewicht auswirkt. • Die Anzahl der Polpaare p′ variiert zwischen 30 – 46 und tendiert zur oberen Grenze für niedrige Kosten, niedriges Gewicht und niedrigen Wirkungsgrad. Eine hohe Generatorauslastung wird für eine niedrige Generatorinduktivität erreicht. Die Hauptinduktivität verringert sich mit steigendem p′ . Gleichzeitig steigt jedoch die Streuinduktivität, so dass ein Optimum existiert. Gegen diese Tendenz wirkt jedoch die Kostenfunktion, welche von der Anzahl der Spulen abhängig ist und damit von der Anzahl der Polpaare. Sie verschiebt das Optimum zu keineren Polpaarzahlen. • Die thermische Belastung A · J variiert im gesamten zulässigen Bereich zwischen 1000 – 3500 A2 /( cm mm2 ) und ist groß für niedrige Kosten, Gewicht und Wirkungsgrad. 6.7. Fazit 157 • Das Magnetgewicht GMagnet variiert zwischen 3500 – 5120 kg und ist niedrig für niedrige Kosten, da die Magnetkosten einen großen Anteil der Kostenfunktion darstellen. • Der Phasenstrom Is variiert zwischen 4750 – 5120 A und ist groß für niedrige Kosten, Gewicht und Wirkungsgrad. • Die Paketlänge lFe variiert zwischen 1,73 – 2,55 m und ist klein für niedrige Kosten, Gewicht und Wirkungsgrad. • Die Stromwärmeverluste Pv,Cu variieren zwischen 105 – 279 kW und sind groß für niedrige Kosten, Gewicht und Wirkungsgrad. • Die Eisenverluste Pv,Fe sind klein für niedrige Kosten, Gewicht und Wirkungsgrad und variieren zwischen 31 – 50 kW. • Die Gesamtverluste Pv,gesamt variieren zwischen 153 – 310 kW. • Die maximale Leerlaufspannung Us0 variiert zwischen 890 – 924 V und ist klein für niedrige Kosten, Gewicht und Wirkungsgrad. • Der Leistungsfaktor cos(ϕ) variiert zwischen -0,956 – -0,897 und ist betragsmäßig niedriger für niedrige Kosten, Gewicht und Wirkungsgrad. • Die tangentiale Kraftdichte τf variiert zwischen 46 – 71 kN m2 und ist groß für niedrige Kosten, Gewicht und Wirkungsgrad. 6.7. Fazit Geht man von einer Generator-Tragstrukturmasse (inkl. Lagerung) von etwa 60 t aus, so dürfte der ausgewählte optimale Generator mit etwa 100 t realisierbar sein. 5 MW Windenergieanlagen haben üblicherweise eine Turmkopfmasse zwischen 250− 500 t. Bei einer Rotormasse von 120 t könnte somit eine Turmkopfmasse von 250 t realisierbar sein. Gerade im Offshore-Bereich ist die Turmkopfmasse entscheidend für die Fundamentkosten. Getriebelose Windenergieanlagen mit permanenterregten Generatoren sind daher auch im Offshore-Bereich absolut konkurrenzfähig. Falls für Offshore-Windenergieanlagen die Restriktion maximaler Aussendurchmesser Da < 5 m wegfallen könnte, dürften sich noch weitere Massen- und Kostenvorteile ergeben. Weitere Aussagen zum Kostenvergleich mit konventionellen Anlagen sind schwer zu treffen und würde den Umfang dieser Arbeit sprengen. 6. Optimierung — Resultate 158 Parameter hMag mm A2 A·J cm mm2 p′ 1 khN 1 kbN 1 cos(ϕ) 1 kN τf m2 lFe m GMagnet kg GAktiv t Z 1 Us0 V Us V Is A hN mm bN mm Kosten kEuro Pv,Fe kW Pv,Cu kW Pv, gesamt kW Bδ T ηN % η1/4 % η1/2 % η3/4 % Variante 1 Is ≤ 5120 A Is ≤ 5760 A min max min max 20,9 22 16,8 22 1000 3500 1000 3500 30 46 32 50 0,6 0,83 0,6 0,84 0,44 0,53 0,42 0,54 -0,956 -0,897 -0,964 -0,843 46,6 70,9 46,5 74,9 1,73 2,55 1,63 2,56 3504 5118 2898 5141 41,2 82,3 41,4 78 79 107 78 107 890 924 850 928 690 690 690 690 4745 5120 4712 5517 97,4 195,3 93,4 172,7 25,5 41 24,6 40,2 373,6 655,4 361,7 644,4 30,9 50,3 30,9 51,1 105,4 278,7 107 296,8 152,8 310 153,7 328,3 0,905 1,012 0,915 1,01 94,5 97,2 94,2 97,2 95,4 96,7 95,2 96,7 96,1 97,3 95,9 97,3 95,6 97,4 95,4 97,4 Variante 2 Is ≤ 5760 A Is ≤ 6400 A min max min max 20,9 22 17,4 22 1011 1846 1000 3500 36 56 30 49 0,6 0,75 0,62 0,84 0,45 0,54 0,41 0,53 -0,981 -0,952 -0,953 -0,832 45,4 49,6 47,3 74,8 2,43 2,62 1,64 2,52 4878 5242 2914 5046 54 73,9 41,5 81,3 59 66 66 92 760 760 760 760 561 570 569 620 5757 5760 5776 6224 88,7 154,1 94,9 188,2 21,3 36,9 24,7 41,9 505,4 629,5 361,9 655,1 39,1 49 31,6 51 110,9 191,1 105,3 281,2 157,1 233,2 152,7 314,1 0,935 1,016 0,901 1,008 95,8 97,1 94,4 97,2 95,9 96,7 95,2 96,8 96,5 97,3 96 97,3 96,4 97,4 95,5 97,4 Tabelle 6.16.: Bereich in dem Parameter und Generatorgrößen variieren 7. Zusammenfassung Diese Arbeit beschäftigt sich mit der Berechnung und Optimierung langsam drehender permanenterregter Synchrongeneratoren, die in direkt angetriebenen Windkraftanlagen zum Einsatz kommen. Es wurde das Maschinenberechnungsprogramm PermagnetSG2 entwickelt, welches aus einer Formelsammlung selbständig die Berechnungsabfolge erstellt. Es können Iterationsparameter festgelegt werden und das Programm ermittelt selbständig die für die Iteration notwendige Iterationsschleife. Dies reduziert den maschinenspezifischen Programmieraufwand erheblich und ermöglicht dem Benutzer eine einfache Wartung der verwendeten Berechnungsformeln, da diese nur einmal in der programmierten Formelsammlung stehen. Für die Berechnung des magnetischen Kreises wird das FEM-Programm ANSYS verwendet, welches direkt von PermagnetSG2 aufgerufen werden kann. Ist die Form des Stromes bekannt (Sinusstrom eingeprägt durch einen gesteuerten Gleichrichter), so ist eine statische Magnetkreisberechnung ausreichend. In dieser FE-Berechnung werden dann verschiedene Stellungen des Rotors ausgewertet, um den Einfluss der Nutung zu erfassen. Es können alle Parameter des Ersatzschaltbildes, unter Berücksichtigung unterschiedlicher Komponenten für d- und q-Achse, berechnet werden. Um Rechenzeit zu sparen ist es für eine Grundwellenbetrachtung möglich, mit zwei Rotorpositionen auszukommen. Sollen zusätzlich Oberwellen der induzierten Spannung oder der Kraftdichte bzw. des Drehmoments berechnet werden, müssen mehrere Rotorpositionen ausgewertet werden. Ist die Stromform nicht bekannt (Generatorbetrieb an einem Diodengleichrichter, mit und ohne Einsatz von Kompensationskondensatoren oder Generator mit Klemmenkurzschluss), so kann der Magnetkreis mit einer transienten FE-Berechnung berechnet werden, indem die Diodenbrücke mit Gleichspannungszwischenkreis und evtl. verwendete Kompensationskondensatoren in dem FE-Modell mit berücksichtigt werden. 160 7. Zusammenfassung Für die Kurzschlussberechnungen werden in dem transienten FE-Modell Widerstände zwischen den Generatorklemmen modelliert, welche je nach Kurzschlussfall hoch- oder niederohmig sind. Aus dieser transienten FE-Berechnung kann neben dem Kurzschlussmoment auch Rückschluss auf die Gefahr einer Entmagnetisierung gezogen werden, da die lokalen magnetischen Feldstärken in jedem Element der Permanentmagnete zur Verfügung stehen. Es ist möglich, den Kurzschluss sowohl aus dem Lastbetrieb als auch aus dem Leerlauf zu untersuchen. Die axiale Schrägung einer Maschine kann durch Berechnung mehrerer Schrägungssegmente berücksichtigt werden. Für die Anordnung und Gewichtung dieser Segmente gibt es unterschiedliche Methoden, die auf ihr Konvergenzverhalten hin untersucht wurden. Aus Gründen der Geräuschemission versucht man, die durch die Nutung auftretenden Kraftdichteschwankungen zu minimieren. Dies wird zum einen durch die Schrägung realisiert, jedoch hat diese Lösung keinen Einfluss auf die lokal anregende Kraftdichteschwankung. Diese kann durch die Wahl der Polbedeckung oder durch eine Magnetstaffelung, bei der die Magnete eines Polpaares um eine halbe Nutteilung zusammenrücken, reduziert werden. Diese drei Methoden sowie eine Kombination derer wurde untersucht und miteinander verglichen. Es wurde eine Methode zur Berechnung der Eisenverluste implementiert, die die Form der lokalen Magnetisierung im Zahn oder Joch berücksichtigt. Dieser Flussdichteverlauf, welcher in den Zähnen eher einer Wechselmagnetisierung und im Joch eher einer Kreismagnetisierung gleicht, kann für jedes Element aus der FEBerechnung extrahiert werden. Die Methode erlaubt dabei auch die Berücksichtigung der im Flussdichteverlauf auftretenden Oberwellen. Mit der vorgestellten Methode kann zwar nicht auf die in der klassischen Methode eingesetzten Baufaktoren verzichtet werden, jedoch kann deren Korrektur weitestgehend auf die Verlusterhöhung an den Stanzrändern reduziert werden. Die durch Wirbelströme verursachten Rotorverluste wurden mit einem analytischen Wanderwellenansatz in einem Mehrschichtenmodell berechnet, bei dem die relativ zum Rotor sich bewegenden Flussdichteharmonische mit Hilfe der FE-Berechnung bestimmt werden. Das Berechnungsprogramm wurde mit Hilfe von Messergebnissen eines direktangetriebenen permanenterregten Synchrongenerators, der in einer Windkraftanlage 161 in Betrieb steht, validiert. Dieser Generator besitzt parallelgeschaltete Kompensationskondensatoren und zwei 3-phasige Wicklungen, die über einen getrennten Sternpunkt verfügen. Der Generator speist auf einen Zwischenkreiskondensator über einen Diodengleichrichter mit nachfolgenden Hochsetzsteller ein. Es standen Messergebnisse der Spannungen und Ströme aus drei unterschiedlichen Messungen, nämlich Leerlauf und Betrieb unter Last mit und ohne Kompensationskondensatoren zur Verfügung. Es konnte eine gute Übereinstimmung der FE-Berechnung mit diesen Messergebnissen festgestellt werden. Für die mehrkriterielle Optimierung eines permanenterregten Synchrongenerators wurde in einem 5-dimensionalen Parameterraum (Parameter p′ , hMag , hN , bN , Is ) eine Parametervariationsrechnung mit der FE-Methode durchgeführt, bei der die Parameter in einem definierten Bereich äquidistant variiert wurden. Dadurch entstand ein 5-dimensionales Gitter für diverse Ergebnisse der Generatorberechnung wie Kraftdichte, Phasenstrom, Gewicht, Kosten etc. In diesem Gitter konnte durch Interpolation jeder beliebige Generatorblechschnitt schnell berechnet werden. Dies ermöglichte den Einsatz von Optimierungsalgorithmen, bei denen in der Regel hunderte von Funktionsauswertungen (Generatorberechnungen) auf der Suche nach einem Optimum nötig sind. Da in der Realität meist mehrere Optimierungsziele gewünscht sind, die sich zumeist gegenläufig verhalten, wurde ein mehrkriterieller Optimierungsalgorithmus implementiert, welcher die effiziente Menge der Zielfunktionen und die Pareto-Menge des Parametervektors bestimmt. Die damit gefundenen Lösungen geben dann Einblick in das Kosten-Nutzen-Verhältnis der betrachteten Zielfunktionen. Das Bemerkenswerte an der hier implementierten mehrkriteriellen Optimierungsmethode ist, dass die berechneten Punkte, welche die effiziente Menge approximieren, auch zur effizienten Menge gehören. Es findet somit keine Annäherung von außen an die effiziente Menge statt, wie bei den meisten mehrkriteriellen Optimierungsalgorithmen, die auf evolutionären oder genetischen Algorithmen basieren. Somit kann schon nach wenigen berechneten Punkten auf den Verlauf der effizienten Menge geschlossen werden. Als Anwendungsbeispiel wurde ein 5, 3 MW Generator nach den Zielfunktionen minimales Gewicht der aktiven Massen, minimale Kosten und maximaler Wirkungsgrad optimiert. Dabei wurden verschiedene Varianten von gesteuerten Gleichrichtern berücksichtigt, welche sich in den Randbedingungen maximal erlaubte Klemmenspannung und Phasenstrom bemerkbar machten. Mit Hilfe der berechneten effizienten Mengen wurde ein Generator ausgewählt. Bei der endgültigen Auslegung 162 7. Zusammenfassung muss beachtet werden, dass manche Größen wie Polpaarzahl, Windungszahl, Leiterhöhe und -breite nur diskret gewählt werden können. Mitunter kann es schwierig sein, die Wicklung so, wie sie von der Optimierung berechnet wurde, zu realisieren. Dann muss eine alternative Polpaarzahl gewählt werden, welche es erlaubt, die geforderte Windungszahl zu treffen. Das in dieser Arbeit entwickelte Generatorauslegungs- und Optimierungsprogramm stellt ein leistungsfähiges Werkzeug dar. Bei der Berechnung der magnetischen Kreise kann die Geometrie des Generatorblechschnittes und die nichtlinearen Materialeigenschaften mit Hilfe der FE-Methode genau berücksichtigt werden. Der einzige Nachteil der FE-Methode ist die benötigte Rechenzeit, welche jedoch im Zuge der extrem schnell steigenden Rechenleistung immer unbedeutender wird. Durch die mehrkriterielle Optimierung ist es möglich, die richtigen Entscheidungen zu treffen um den für die jeweilige Anwendung optimalen Generator zu realisieren.