Teil 3: Elektrodynamik [ ]
Werbung

D. Michel
Vorlesung Experimentalphysik
(revidierte Fassung, 2004)
Teil 3: Elektrodynamik
1. Elektrostatik
1.1. Elektrische Ladungen und Kräfte zwischen Ladungen
Ladungen qi
-
zwei Arten (+,-)
q = N⋅ e, e = 1.602 ⋅ 10-19 C = Elementarladung
N ganz,
1 Coulomb = 1 C = 1 A ⋅ s
Kraft zwischen zwei Ladungen q1, q2
r
F=
q ⋅q r
1
⋅ 1 2 2 ⋅ er
4 ⋅π ⋅ ε0
r
q1
q2
r
er
Coulombsches Gesetz
C2
N ⋅ m2
Elektrische Feldkonstante
ε0 = 8.854 ⋅ 10-12
r
Anziehung: zwei ungleiche Ladungen (+,-)
Abstoßung: zwei gleichartige Ladungen (+,+) oder (-,-)
Versuch: Messung von Ladung durch Elektrometer
Messung der 1 r 2 - Abhängigkeit
1.2. Elektrische Felder
r r
Im Gebiet, wo Coulombkräfte wirken, gibt es ein elektrisches Feld: E (r )
r r
Def. E (r )
Sei Q raumfeste Ladung und q kleine Probeladung.
r
F=
1
4 ⋅π ⋅ ε0
r
r
F
E = lim =
q →0 q
[E ] = N
A⋅ s
⋅
r r
r
Q
(r )
⋅
q
⋅
e
=
q
⋅
E
r
r2
1
Q r
⋅ 2 ⋅ er
4 ⋅π ⋅ ε0 r
El. Feldstärke von Q im Vakuum
1
r
Beachte: Diese Def. ist nicht geeignet zur allg. Berechnung von E !
Veranschaulichung
Versuch: El. Feld d. Punktladungen
Die Dichte der Feldlinien ist Maß für Stärke
des Feldes.
(Dichte = Zahl der Durchstoßpunkte durch
Oberfläche einer Kugel um Q)
Positive Ladung
Beachte:
r
Richtung von E immer von ⊕ ausgehend!
Hier:
Radiales Feld
Negative Ladung
Feldlinien:
- von ⊕ zu - treten senkrecht aus Oberfläche eines leitenden Körpers aus
- In Richtung der Feldlinien herrscht “Zug”, quer zu ihnen “Druck”.
- Je nach Verlauf der Feldlinien: radiales Feld (vom Mittelpunkt ⊕ oder ! aus)
homogenes Feld (parallel)
inhomogenes Feld (nicht parallele Feldlinien)
Überlagerung von Feldlinien:
r
r
E = ∑ Ei
i
z.B.: +q, -q
Dipolfeld
Dipolfeld:
r r r r
3 ⋅ ( p ⋅ r ) ⋅ r − p ⋅ r 2
⋅
4 ⋅π ⋅ ε 0
r5
r
r
r
p = q ⋅ l ⋅ el (für l → 0, q → ∞, so daß p = q ⋅ l = const.)
r r
E (r ) =
1
l
-q
r
el
⊕
+q
2
r
Versuch: Veranschaulichung des E - Feldes einer Punktladung, Dipolfeld
1.3. Elektrischer Fluß (Φ) und Ladung
-
r
dΦ = E ⊥ ⋅ dA
r
= E ⋅ dA ⋅ cos α
r r
= E ⋅ dA
E ⊥ = E ⋅ cos α
-
Φ=
r r
d
Φ
=
E
∫∫
∫∫ ⋅ dA
Fläche A, die
Ladg. umschließt
-
r
Beispiel: E von Punktladung Q, A Kugel um Punktladung:
r
r
dA = r 2 ⋅ sin ϑ ⋅ dϑ ⋅ dϕ ⋅ er
π 2π 1
r
Q r
Φ= ∫
⋅
⋅ er ⋅ r 2 ⋅ sin ϑ ⋅ dϕ ⋅ dϑ ⋅ er
∫
ϑ =0 ϕ =0 4πε o r 2
=
Q
π 2π
Q
0 0
o
sin ϑ ⋅ dϑ ⋅ dϕ =
4 ⋅π ⋅ ε ∫ ∫
ε
4π
3
Der Satz
wobei
r r Q
gilt allgemein,
Φ = ∫∫ E ⋅ dA =
ε
A
o
Q = Qumschlossen, A beliebige Fläche
Gauß – Ostrogradski – Satz bzw. 1. Maxwellsche
Gleichung
r
- Dieser Satz ist die theoretische Grundlage für die Berechnung elektrischer Felder E aus
r
Ladung, die allgemein durch Ladungsdichte ρ (r ) beschrieben wird:
Q=
r
∫∫∫ ρ (r ) ⋅ dV
Volumen
Versuche:
- Im Innern einer geladenen metall. Hohlkugel gibt es keine Ladungen:
Φ=
Qinnen
=0
εo
Im äußeren Raum: Feld wie bei einer Punktladung.
r
- Im Inneren eines metall. Käfigs (Faraday – Käfig) herrscht kein E - Feld
r
- Hohe Werte von E bei Flächen mit kleinem Krümmungsradius (“Spitzenentladung”)
1.4. Influenz
r r
Ein elektrisch geladener Körper ist von einem elektr. Feld E (r ) umgeben, das auf Ladungen
r r
r r
q, die sich im Feld befinden, Kräfte ausübt: F (r ) = q ⋅ E (r ) .
Sind die Ladungen frei beweglich (z. B. Metall), so tritt eine räumliche Ladungstrennung auf,
“Influenz”.
Versuch:
- Nachweis der Influenz an Metallkugeln und –plättchen
r
- E - Feldlinienbild einer geladenen Kugel vor ungeladener Metallplatte
“fiktive Spiegelladung” (-q)
- Influenzmaschine
4
- Van de Graaf – Generator
Auf Nichtleiter (Isolatoren) wirkt ein elektrisches Feld durch Polarisation
1.5. Elektrostatisches Potential
Br r
r
W AB = q ⋅ ∫ E (r ′) ⋅ dr ′
A
Arbeit, um Probeladung von A nach B zu bringen:
W AB = − q ⋅ V AB
r
W AB ist unabhängig vom Weg, wenn E wirbelfrei ist, d.
r r
h. rot E (r ) = 0 ist.
r
In diesem Falle existiert eine Potentialfunktion (“Potential”) V (r ) derart, daß gilt:
r r
r
r
E (r ) = − grad V (r ) = −∇ V (r )
∇ = Nabla - Operator :
∂ r
∂ r
∂ r
∇=
⋅ ex + ⋅ e y + ⋅ ez
∂x
∂y
∂z
und
r
B r r
r
r
r r
V (r )− V (ro ) = − ∫ E (r ′)dr ′ = V AB = U AB = −U
r
B
A
A r
0
r
Potentialdifferenz oder elektrische Spannung zwischen den Orten r (B ) und r0 ( A)
[U ] = 1 Volt = V = N ⋅ m
A⋅ s
r
Gewöhnlich wählt man: r∞ → ∞ und setzt V (∞ ) = 0 , dann gilt
5
r
rr r
r
r
V (r ) = − ∫ E (r ′) ⋅ dr ′
∞
Beispiel:
Punktladung:
r
V (r ) =
Dipol:
r
V (r ) =
Q
4 ⋅π ⋅ ε o ⋅ r
r r
p⋅r
4 ⋅π ⋅ εo ⋅ r 3
Beachte: Situation analog zur Mechanik. Dort Potential bei konservativen Kräften:
r r
r r
F (r ) = q ⋅ E (r )
ist eine konservative Kraft, falls die obige Bedingung
erfüllt ist.
1.6. Kondensatoren
Def. der Kapazität C
C=
Q
:
U
Q = gespeicherte Ladung
U = angelegte Spannung
[C ] = 1 A ⋅ s = 1 Farad = 1 F
V
1 F ist sehr große Zahl, für praktische Anwendungen 1µF (10-6 F), 1nF (10-9 F), 1pF (10-12F)
Plattenkondensator
Zwei entgegengesetzt geladene parallele Flächen im Abstand d << a, b (Seitenlängen
Rechteck)
+Q
-Q
r
E
b, A = a⋅ b
(Fläche)
0
d
x
a
r
Idealfall: Keine Randeffekte, Feld außerhalb der Platten = 0, innerhalb E = const. , senkrecht
auf Fläche:
r r
E = En ,
n = “Normale” zur Fläche
Flächenladungsdichte:
σ=
Q
A
6
1. Maxwellsche Gleichung (vgl. Kap. 1.3.)
r r Q
E
∫∫ ⋅ dA = ,
εo
Q
Q = Qumschlossen
r
Die Striche bezeichnen “umschlossene” Fläche. Da E = 0 außerhalb
der Kondensatorplatten gilt, folgt ganz leicht:
r r r
Q σ⋅A
E
∫∫ ⋅ dA = En ⋅ A = =
-
r σ r
E = ⋅ ex ,
ε0
ε0
r
e x = Richtung der Normale.
εo
dr r
r
σ d
σ
U AB = − ∫ E (r ′) ⋅ dr ′ = −
⋅ ∫ dx = −
⋅ d = −U (siehe Definition von UAB!)
ε o
εo
o
o
- Damit:
C=
Q σ ⋅ A εo ⋅ A
=
=
σ
U
d
⋅d
εo
Wirkprinzip eines Kondensators:
1)
2) Aufladen einer Platte, durch Influenz Ladungstrennung
ungeladen
U
+Q +
+
+
+
+
+
+
-
+
+
+
+
+
+
+
(Erde)
3) Rechte Platte wird geerdet, d. h. +Q rechts fließt ab, aber –Q rechts bleibt
+Q +
+
+
+
+
+
- -Q
-
Versuche:
1. Plattenkondensator
Q = const., d variabel → U?
7
U = const., d variabel → Q?
2. Q ∼ U, Q ∼ A
3. Parallel- und Reihenschaltung von C’s
Parallel:
U
C1
C2
C3
C = ∑ Ci
Entspricht: Addition der Ladungen:
i
Reihenschaltung:
C1
U
C2
Addition der Spannungen:
C3
1
1
=∑
C
i Ci
Energie des elektr. Feldes
Transportiere +dq zur positiven Platte, Arbeit
1
⋅ q ⋅ dq
C
Q
1
Q2
1
W = ∫ q ⋅ dq =
= ⋅ C ⋅U 2
Co
2⋅C 2
dW = U ⋅ dq =
Versuch:
4. Spannungswaage (Kraft zwischen Platten eines Plattenkondensators)
W =
1
1 ε ⋅A 2
1 ε ⋅ A ⋅U 2
⋅ C ⋅U 2 = ⋅ o
⋅ U → W (x ) = ⋅ o
2
2
d
x
d →x 2
r r
r
d
1 ε ⋅ A ⋅U 2 r
W = ∫ F ⋅ dr → F ( x ) = − [W ( x )] ⋅ e x = ⋅ o
⋅ ex
dx
2
x2
Versuch:
5. Kondensator als Energiespeicher
8
Ergänzung: Kugelkondensator
r < R1
r
keine Ladung E ≡ 0
R1 < r < R2 Ladung +Q wirkt wie
Punktladung im Mittelpunkt
r > R2
∑Q
i
= 0 , kein Feld außen
i
U = V (R1 ) − V (R2 )
=
1
Q
1
⋅ −
4 ⋅ π ⋅ ε o R1 R2
1
Q
1
= C = 4 ⋅π ⋅ εo ⋅ −
U
R1 R2
−1
1.7. Dielektrika im elektrischen Feld. Darstellung am Beispiel des Plattenkondensators
6. Versuch:
Isolierende Platte (Dielektrikum) zwischen Platten eines Kondensators schieben:
U sinkt um Faktor ε > 1. Da Q = const. gilt.
C Dielektrikum = ε ⋅ CVakuum
ε ⋅εo ⋅ A
,
d
ε > 1 relative Dielektrizitätskonstante
r
r
r
Weiter: Da U sinkt, muß auch E um Faktor ε abgenommen haben: E = EVakuum
r
r
1 r
E ⇒ ⋅ E = E Diel
ε
Verallgemeinerung:
Führe ein
r
r
r
D = ε ⋅ ε ⋅ E( Diel ) = ε o ⋅ E (Vakuum ) Dielektrische Verschiebung
o
(elektrische Flußdichte!), so daß
9
r r
D
∫∫ ⋅ dA = Q frei ,
mit Qfrei = freie Ladungen, d. h. ohne Influenzladung!
[D] = [ε ⋅ ε o ⋅ E ] = 1 ⋅ A2⋅ s = 1 ⋅ C2
r
m
m
r
r
Also: D widerspiegelt den Einfluß der freien Ladungen, während E im Dielektrikum auch
durch die Polarisationsladungen (infolge Influenz, vgl. Kap. 1.4.) bestimmt wird: Das führt
auch auf die Schreibweise:
r
r
D = ε ⋅ ε o ⋅ E
Diel
r
r
P = ε o ⋅ (ε − 1) ⋅ E
r
= ε o ⋅ E
r
r
+ P = εo ⋅ E
Vak
Diel
Diel
r
= ε o ⋅ χ ⋅ E
Diel
χ = [chi ] = ε − 1
Dielektrische Polarisation
dielektrische Suszeptibilität
Versuche:
7. Kondensator mit Dielektrikum ε (siehe Nr. 6)
+Q
C=
U
-Q
Q ε ⋅Q
=
= ε ⋅ CVak
U
U
Da Q = const.
Dielektrikum
→
C ↑, U ↓
8. Kondensator teilweise mit Dielektrikum gefüllt
A1
+ +
+
A2
+++++++
r
ε 1 ⋅ E Diel
EVak
Ladungsdichte nimmt im Dielektrikum
sprunghaft zu.
Gesamtkapazität durch Parallelschaltung
-
-
-
---------
C = C1 + C 2
ε ⋅ A1 ε ⋅ ε o ⋅ A2
+
d
d
= o
zweier Teilkondensatoren mit Flächen
A1 , A2 ;
U
überall
A1 (ε o ), A2 (ε ⋅ ε o )
gleich;
10
9. Kondensator mit geschichtetem Dielektrikum aus Materialien mit unterschiedlichem ε i
+Q
di
εi
Ladung überall gleich. Spannung ändert
sich sprunghaft zwischen Schichten,
Reihenschaltung.
1
1 di
=
⋅∑ .
C A ⋅ ε o i ε i
-Q
10. Funkendurchschlag bei Rückschub eines Dielektrikums
Elektrische Feldenergie im Dielektrikum
Ausgangspunkt:
U = d ⋅E
Wel =
D = ε ⋅ε0 ⋅ E
1
1 ε ⋅εo ⋅ A 2 1
1
⋅ C ⋅U 2 = ⋅
⋅U = ⋅ A ⋅ d ⋅ E ⋅ ε ⋅ ε o ⋅ E = ⋅V ⋅ E ⋅ D
2
2
d
2
2
Wichtig: Die Energie befindet sich im elektrischen Feld:
wel =
Wel 1 r r
= ⋅E⋅D,
V
2
wel : Energiedichte des elektr. Feldes
Versuch:
Steighöhe einer dielektr. Flüssigkeit im elektr. Feld eines Plattenkondensators
d
ρ Fl = Dichte der Flüssigkeit
Beachte:
h
- U = const.
- Q wird nachgeliefert
- Flüssigkeit steigt so lange, bis Kräftegleichgewicht
(D = ε ⋅ ε 0 ⋅ E ) :
r
r
Fel + Fgrav = 0
- Da
r r
W = ∫ F ⋅ dr :
Hier
r
dW
F =
,
dh
daraus
dWmech = ρ Fl . ⋅ g ⋅ h ⋅ dV , dV = b ⋅ d ⋅ dh,
r
1 r r
1
1 r
= dWelektr = ⋅ E ⋅ D ⋅ dV − ⋅ ε 0 ⋅ E 2 ⋅ dV = ⋅ E 2 ⋅ ε 0 ⋅ (ε − 1)dV
2
2
2
11
h=
ε o ⋅ (ε − 1) ⋅ E 2
2 ⋅ ρ Fl ⋅ g
2. Stationäre Ströme
2.1. Stromstärke I
Strom als Ladungstransport:
I=
dQ
:
dt
Ladungsmenge dQ, die pro Zeit dt durch
Querschnitt des stromführenden Leiters fließt.
Stromrichtung ⊥ Querschnitt
[I] = 1Ampere = 1 A,
André Marie Ampère, 1775 – 1836
Einheit des Stromes: Kraft zwischen zwei parallelen Stromleitern:
Festsetzung:
L = 1m
r
I
F
r = 1m
r
−F
I = 1A
F
= 2 ⋅ 10 −7 N ⋅ m −1 , wegen
L
F µo ⋅ I 2
=
, (Details später), r = 1 m, I = 1 A
L 2 ⋅π ⋅ r
führt dies auf Festsetzung:
µ o = 4 ⋅ π ⋅ 10 −7 V ⋅ s ( A ⋅ m )
(Def.)
2.2. Ohmsches Gesetz
Zusammenhang zwischen Strom und Spannung bei verschiedenen Leitern.
Versuch: I, U – Kennlinie für Wolfram, Kohle, Draht (Normalwiderstand)
Nur, wenn gilt
I∝U
R=
U
,
I
ist Widerstand definierbar.
sonst
nur
diff.
Widerstand:
Rdiff =
dU
dI
(Anstieg!)
Bei Draht mit Querschnitt A und Länge l gilt; mit ρ = spezifischer Widerstand:
12
R= ρ⋅
σ=
l
A
Versuch: Zeige R ∝ l , R ∝
1
1
A
elektrische Leitfähigkeit
ρ
Parallel- und Reihenschaltung von Ohmschen Widerständen (von Drähten):
Versuch: Parallel-, Reihenschaltung von Drähten
R=
U
,
I
U = const., messe I
Reihe:
Parallel:
l wächst,
R wächst,
I wird kleiner
A nimmt zu, R nimmt ab, I wird größer
a) Parallele Widerstände
R1
U
I1
R2
I2
Spannung U überall gleich
Strom nimmt zu: I = I 1 + I 2 + I 3 + ...
R3
I3
1
U
1
1
= U ⋅ +
+
+ ...
R ges
R1 R2 R3
1
1
=∑
R ges
i Ri
I=
b) Reihenschaltung
U
123
U1
123
U2
123
U3
Strom überall gleich, Spannung vergrößert
U = U1 + U2 + U3 + ...
U = Rges ⋅ I = I ⋅ (R1 + R2 + R3 +...)
R ges = ∑ Ri
i
13
Spannungsteiler
A
B
x
Schema
x
⋅U o
L
x−L
U 2 (x ) =
⋅U o
L
U 1 (x ) =
Spannung Uo zwischen A und B.
Draht mit Länge l, gleichmäßiger Querschnitt:
l
R= ρ⋅
A
R∝x
gegen Punkt A
gegen Punkt B
Zeige auch Wirkung als Vorwiderstand:
Lampe
regelbarer Widerstand
U1
U2
R1
R2
Uo
Uo
Uo
=
=I
R
R1 + R2
U o = I ⋅ R1 + I ⋅ R2
123 123
U
U
1
2
R1
U1 = Uo ⋅
R1 + R2
R2
U2 = Uo ⋅
R1 + R2
Spannungsteiler ohne Last
2.3. Kirchhoffsche Regeln
Ausgangspunkt:
- Ladung gehorcht Erhaltungssatz
r
- E − Feld besitzt ein Potential
14
Versuche:
1.) Knotenregel
∑I
k
=0
k
Die Summe aller Ströme, die in den Knoten
münden, ist Null. (Stromrichtungen können
beliebig festgelegt werden, zufließende Ströme
sind positiv.)
2.) Maschenregel
∑U
k
k
= ∑ (Rk ⋅ I k + U e ,k ) = 0
U(e)k
Spannungen
Rk ⋅ Ik Spannungsabfälle an Widerständen
und Ue,k
− ∑ U ( e ) k = ∑ Rk ⋅ I k
k
eingefügte (eingeprägte) gerichtete
i
+
Ue, k
gibt Richtungssinn an, für den positiv zu
zählen ist, in Summe
Stromrichtung
+
zu zählende Spannungsrichtung
15
Ergänzung:
Bezeichnet man in einem geschlossenen Stromkreis die im Sinne des Uhrzeigers fließenden
Ströme bzw. gerichteten Spannungen (Spannungsanstiege!) als positiv, dagegen die im
entgegengesetzten Sinne fließenden Ströme bzw. gerichteten Spannungen als negativ, so ist
die Summe der Größen Uk (Spannungsanstiege, elektromotorischen Kräfte) gleich der Summe
der Produkte Ik ⋅ Rk.
∑I
k
⋅ Rk = −U e ,k
∑ (I
oder
k
k
⋅ Rk + U e , k ) = 0
k
Dies folgt aus:
r r r
E
∫ (r ) ⋅ dr = 0
r r r
r
− ∫ E (r ) ⋅ dr = V (r )
Beachte:
A r
r r
U AB = V A − VB = − ∫ E (r ) ⋅ dr
B
oder
r r r
E
∫ (r ) ⋅ dr = VB − V A = −U AB
Spannungsabfall ist positiv,
falls:
+
Spannungsabfall U
Spannungsanstieg:
+
Spannungsanstieg, wenn Spannungsquelle
(EMR) von – nach ⊕ durchlaufen.
Bsp.
R1 ⋅ I 1 + R2 ⋅ I 2 + R3 ⋅ I 3 − R5 ⋅ I 5 = −(− U 1 − U 2 + U 3 )
= U1 + U 2 − U 3
2.4. Gleichstrommeßtechnik
1.) Energie uned Leistung
Energie:
Leistung:
W = Q ⋅U
P = W& = U ⋅ Q& = U ⋅ I
U = const.
P =U ⋅I = I2 ⋅R =
Joulesches Gesetz
2
U
R
[P] = 1 Watt = 1 V ⋅ A = 1 J ⋅ s −1
[W ] = 1 J = 1 V ⋅ A ⋅ s
16
2.) Innenwiderstand einer Spannungsquelle
Ersatzschaltbild
Ri
Uo = Leerlaufspannung
Ri = Innenwiderstand
U = Uo – Ri ⋅ I
Uo
U falls I ≠ 0
Falls
R = Raußen ≠ 0 :
Kirchhoff
I
r
I
Uo
R
U = Uo - Ri ⋅ I = R ⋅ I
Uo
I=
Ri + R
Ri
Falls
R=0
U
IK = 0
Ri
(Kurzschluß)
Kurzschlußstrom
Frage: Wann ist P = U⋅ I, Leistung am Verbraucher, maximal: Bei R = Ri (Anpassung)
3.) Messung von I und U
Spannung:
Ri
Ri groß gegen alle anderen Widerstände!
U
17
Strom:
Ri
Ri << R, Ri sehr klein!
Meßgerät
4.) Meßbereichserweiterung
Voltmeter (Spannungsmesser)
Es ist ein Vorwiderstand RV nötig:
RV
UV
I
V
U2 = UV + U1
U2 = I ⋅ RV + I ⋅ Ri = m ⋅ U1
U1
m:
Faktor zur Erweiterung
U2
RV = (m − 1) ⋅ Ri
Ampèremeter (Strommesser)
Parallelschaltung eines Widerstandes RP
I1
A
I2
I2
RP
I2 = I1 + IP
U U
U
n⋅
=
+
Ri Ri RP
n:
Erweiterung
IP
RP =
Ri
n −1
Kompensationsmethode nach Poggendorff
Stromlose Messung einer unbekannten Spannung U ′ durch Vergleich mit einer gegebenen
Spannung UV:
18
I (Strommessung)
U'
r
U
R-r
UV
Falls I = 0:
U ′ = UV = U ⋅
r
R
Brückenschaltungen zur Messung von Widerständen
Wheatstone - Brücke
Ia, Ra
C
Rb, Ib
FG
A
G
B
Id
Rc Ic
Ia
Bei Stromlosigkeit, IG = 0, muß gelten
(Kirchhoffsche Regeln)
= Ib,
Ic = Id
Ia ⋅ Ra = Ic ⋅ Rc
Ib ⋅ Rb = Id ⋅ Rd
oder
Ra Rb
=
Rc R d
Rd
D
U
Wenn Ra, Rc, Rb bekannt, kann Rd = Rx bestimmt werden.
Thomson – Brücke
Problem: Widerstand der Zuleitungsdrähte beeinflußt Genauigkeit. Dies wird umgangen
durch Nebenschluß r1, r2.
19
Falls IG = 0:
R x r1 R1
= =
R r2 R2
r1
Rx
r2
R
Genauigkeit bis 10-6!
IG
R2
R1
U
3. Statische Magnetfelder
3.1. Kräfte im Magnetfeld
3.1.1. Zur Einführung und Begriffsbildung:
Magnete. Polstärke. Feldgrößen. Kräfte im Magnetfeld. Permanentmagnete.
Magnetische Pole.
Griech. Altertum: Bestimmte Mineralien ziehen Eisen an: Lithos “magnetes”, benannt nach
nordgr. Landschaft “Magnissia” oder nach griech. - kleinasiatischer Stadt “Magnesia”.
Permanentmagnete
Magnetnadeln zeigen immer nach Norden (Navigation).
Versuch
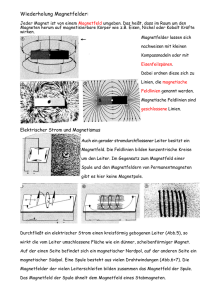
Feldlinienbild eines stabförmigen Permanentmagneten. Demonstration mit Eisenfeilspänen:
⇒ Stabmagnet im Rohr, das zylindrisch mit
Feinglycerin umgeben ist.
⇒ Stabmagnet unter Glasplatte, auf der Fe –
Späne sind. Overhead – Projektor
⇒ Stabmagnet unter Platte, auf der viele
bewegliche El. – Magnete stehen.
Die Späne lassen Linien erkennen, die sich über zwei Punkten häufen, die magnetische Pole
heißen; entsprechend Nord- oder Südpol, je nachdem ob die Pole nach Norden oder Süden
zeigen, bzw. bei Drehung ausrichten.
Beim Durchbrechen eines Stabmagneten erhält man wieder zwei Stücke mit N – und S – Pol.
Dies gilt nach heutiger Erkenntnis allgemein: Es gibt keine isolierten magnetischen Pole,
sondern es kommen N – und S – Pole immer gemeinsam vor.
20
Weiter: Während elektrische Feldlinien immer an den Ladungen enden, sind magnetische
Feldlinien immer geschlossen.
Man kann jedoch durch einen langen dünnen Stabmagneten beide Pole räumlich weit
voneinander entfernen, so daß näherungsweise magnetisches Monopol realisiert ist.
Versuch:
Magnetische Drehwaage: Gleichnamige Pole stoßen sich ab, ungleichnamige ziehen einander
an. Damit gibt es eine Analogie zu den Ladungen in der Elektrostatik:
Elektrischer Ladung Q entspricht in der Magnetstatik die Polstärke p.
Magnetische (Dreh)Waage:
Kraft zwischen p1 und p2 im Abstand r:
r
p ⋅p r
F = ƒ · 1 2 2 ⋅ er
r
SI:
µ0 :
ƒ, Konstante, abhängig von [p]:
V ⋅s
1
, µ 0 = 4 ⋅ π ⋅ 10 −7 ⋅
4 ⋅π ⋅ µ0
A⋅m
Magnetische Feldkonstante (auch: magnet. Permeabilität(skonstante) oder
Induktionskonstante, vgl. Abschnitt
)
[p)] = 1 V · s,
ƒ=
1
Versuch: Magn. Waage, zeige
F∝ 2
r
r
Magnetische Feldstärke H der Polstärke p1
r
r
F
H = lim
p2 →0 p
2
[H ] = A ⋅ m
Analog zum elektrischen Feld, für weitere
Betrachtungen aber nicht von Wichtigkeit.
−1
r
Die Begriffsbildung “Magnetische Feldstärke” für H ist historisch begründet. Sie resultiert
aus der Analogie zum Coulombgesetz der Elektrostatik.
r
Es wird noch gezeigt, daß das eigentliche Analogon zur elektrischen Feldstärke E die Größe
r
r
B = µ 0 ⋅ H (hier: Betrachtungen für Vakuum!) ist, denn es gibt analoge Gleichungen in
r
r
Magnetostatik (mit B ) und in der Elektrostatik (mit E ).
r
B:
magnetische Induktion oder magnetische Flußdichte (historisch begründete
Bezeichnungen), neuerdings in Lehrbüchern auch:
r
B = magnetische Feldstärke
r
H = magnetische Erregung
In dieser Vorlesung: Verwende historisch begründete Bezeichnungen, auch wegen der
Einheiten.
21
r
B =B
def .
[B] = 1 ⋅ V ⋅ s ⋅ m
−2
↓
= 1 Tesla = 1 ⋅ T
1 Gauß = 1 ⋅ G = 10 −4 ⋅ T (ältere Einheit)
Bsp.: Mittlere Induktion des Erdmagnetfeldes ca. 0,2 G
große Magnete (supraleitend) B bis zu 20 T
r
r
3.1.2. Kräfte F auf Ladungen q im Magnetfeld mit Induktion B
Aussage: Überall dort, wo Kräfte dieser Art wirken, herrscht Feld
r
Kraft F , geladene Teilchen q
r
r
- bewegte geladene Teilchen, F ∝ v ⋅ q
r r
r
r
r r
r
- F⊥v ; es gibt eine v − Richtung, bei der F = 0; F ∝ sin α , α = ∠ v , B
( )
- Damit Vektorprodukt:
[
r
r r
F = q⋅ v×B
r
F
]
Lorentz – Kraft
r
B
α
r
zur Richtung von F
r
v
Versuche: Lorentzkraft
Kraft auf stromdurchflossenen Leiter im Magnetfeld
[
r r
r
F = I⋅ l ×B
]
r r
l, v
Draht
Stromrichtung
Querschnitt A
Folgt aus Lorentz – Kraft:
r r
dq
I=
= ∫∫ j ⋅ dA
dt
A
q = − e ⋅n⋅ A⋅l
r
r
r
j = const. , ersetze: q ⋅ v = I ⋅ l
mit:
e:
Ladungseinheit (Elementarladung)
n:
Anzahl pro VE
Α ⋅ l: Vol.
Versuch: Lorentz – Schaukel. Kraftrichtung abhängig von Stromrichtung.
22
Versuch: Kraft auf beweglichen stabförmigen Leiter, der im Magnetfeld weg- oder heran
rollt.
3.2. Magnetfeld stationärer Ströme
3.2.1. Magnetfeld eines geradlinigen Stromleiters
(als spezielles Beispiel zum allg. Verständnis)
Versuch:
Messung des Feldes mit Kompaßnadel, die um
Leiter herumgeführt wird. I fließe aus
Papierebene heraus:
r
r
Die Feldlinien B zeigen in Richtung eϕ und
stellen eine geschlossene Kurve dar, wobei
r
B(r ) = const. für r = const., falls
r > r0
(Drahtradius r0 ).
((Zylinderkoordinaten: r, ϕ, z = h))
Bei Umkehrung der Stromrichtung ändert sich die Feldrichtung.
Wenn I in Richtung des Daumes der rechten Hand zeigt, dann zeigen die übrigen Finger in
Richtung der Feldlinien (Rechte – Hand – Regel).
Versuch:
r
Messung der Abnahme des Betrages von B(r ) mit dem Abstand (senkrecht) vom Draht mit
einer Feldmeßsonde (Hall – Sonde, s. später: Hall – Effekt).
Es ergibt sich eine Abhängigkeit:
r
I
B(r ) ∝ ⋅ eϕ
r
⇒
r
I r
B(r ) = Const ⋅ ⋅ eϕ
r
23
r
I r
B(r ) = Const ⋅ ⋅ eϕ
r
Die Konstante ist durch die Definition der Einheit Ampère festgelegt:
Const =
µ0
2 ⋅π
r
B(r ) = µ 0 ⋅
I
2 ⋅π ⋅ r
r
⋅ eϕ ,
r
H (r ) =
I
2 ⋅π ⋅ r
r
eϕ
3.2.2. Ampèresches Gesetz
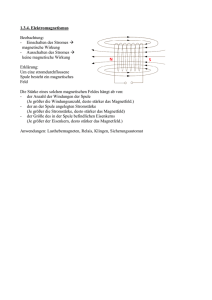
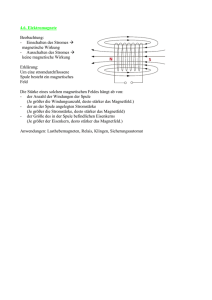
Feldlinienbilder bei verschiedenen stromdurchflossenen Leitern sind ähnlich wie für
Permanentmagnete
→
sehr langer Draht
→
Spule
→
Ringspule (Toroid)
24
r r r r
Richtung von H (r ), B(r )
Rechte – Hand – Regel
Verallgemeinerung der Situation für unendlich langen Draht
r
r
längs einer H - Feld – Linie
r
∫ H (r ) ⋅ ds
Bilde Integral
y
r
H (r )
r
0
Strom in z – Richtung
r
H in x – y – Richtung
x
r
H (r )
r
r
ds = r ⋅ dϕ
r
r
r
H (r ) ds
r
H (r ) ⋅ ds = H (r ) ⋅ r ⋅ dϕ
0
Damit
H (r ) =
r r
H
∫ ⋅ ds =
geschlossene
Kurve
2⋅π
∫ H (r ) ⋅ r ⋅ dϕ =
ϕ =0
I
2 ⋅π ⋅ r
2⋅π
I
⋅ dϕ = I
2 ⋅ π ∫0
Ampèresches Gesetz
Das Ampèresche Gesetz gilt allgemein, d. h. für beliebige geschlossene Kurven um Flächen,
die vom Strom I durchflossen sind.
r
r r
I = ∫∫ j (r ) ⋅ dA
r
r
r r
r r
r r
(
)
(
)
H
⋅
d
s
≡
rot
H
r
⋅
d
A
=
j
r
⋅
d
A
=I
∫
∫∫
∫∫
A
A
differentielle Schreibweise:
r r
r r
rot H (r ) = j (r )
(2. Maxwellsche Gleichung)
(umschlossen)
25
3.3. Beispiele zur Berechnung von Magnetfeldern beliebiger Stromverteilungen mit dem
Ampèreschen Gesetz
3.3.1. Geradliniger stromdurchflossener Leiter
(Zylinder mit Radius r0)
r0
r > r0 : I = const., j =
H (r ) =
I
2 ⋅π ⋅ r
I
= const.
π ⋅ r02
(s. oben)
r < r0 :
Es wird nur ein Teil ( I ′ ) des Stromes vom
Integrationsweg umschlossen:
r r
2
H
∫ ⋅ ds = I ′ = π ⋅ r ⋅ j : Da B(r ) = µ 0 ⋅ H (r ) = const.
für r=const.:
2 ⋅ π ⋅ r ⋅ H (r ) = π ⋅ r 2 ⋅ j
H (r ) =
I
2 ⋅π
⋅ r02
⇒
⋅r
⇒
H (r ) =
1
⋅ j⋅r
2
B(r ) =
µ0 ⋅ I
⋅r
2 ⋅ π ⋅ r02
Vgl. früheren Versuch.
3.3.2. Stromdurchflossene lange Spule
Integrationsweg
r0 << L
n - Windungen
26
r r B r r C r r
∫ H ⋅ ds = ∫ H ⋅ ds + ∫ H ⋅ ds +
A
r r
H⊥ds
B
H →0
B
D
r r A r r
∫ H ⋅ ds + ∫ H ⋅ ds = n ⋅ I
C
r r
H⊥ds
D
= H ⋅L
D
∫ ... = 0
wegen
A
∫ ... = 0
C
beliebigem
Abstand
von Spule
C
∫ ... = 0
B
H=
n⋅I
L
3.3.3. Toroid (Ringspule)
n Windungen, Radius der Toroidspule r, Stromrichtung
und Feldrichtung analog wie bei langer Spule
r r
H
∫ ⋅ ds
=
H ⋅ 2 ⋅π ⋅ r = n ⋅ I
H (r ) =
n⋅I
2 ⋅π ⋅ r
Geschlossene
Kurve hier
längs Umfang
2πr, H = const.
27
Der Außenraum einer (idealen) Ringspule ist völlig feldfrei, da alle Feldlinien umschlossen
sind.
*) André Marie Ampère (1775 – 1836)
Pierre Simone Laplace (1749 – 1827)
3.4. Biot – Savart – Gesetz
differentielles B. – S. – Gesetz, oft auch Ampère – Laplace- Gesetz genannt
3.4.1. Magnetfeld eines beliebigen stromdurchflossenen Drahtes
r
- Strom: I (r ′)
r
- Feld: H (r )
r r
- dünner Draht mit ro << r − r ′
Ursprung des Koord.-Systems
r r r
r r
I ⋅ dl × (r − r ′)
dH (r ) =
r r 3
4 ⋅π ⋅ r − r ′
r r
Das gesamte Feld H (r ) wird durch Integration über den gesamten Leiter bestimmt.
3.4.2. Anwendung: Kreisförmige Stromschleife (circular current loop)
r
r
Anstelle von dl : verwende ds
y
ds
x
rechts:
r
ds zeigt in Papierebene hinein!
links:
r
ds zeigt heraus!
Berechnung des Feldes auf Symmetrieachse (z – Achse durch Mittelpunkt).
dB⊥
dB⊥
dB⊥
r r
r µo
ds × r
⋅I ⋅ 3
dB =
4 ⋅π
r
r
ds zeigt in Papierebene hinein.
r
r
dB in Ebene ⊥ ro
dB⊥
28
z
Bei der Integration über alle Wegelemente des
Kreises bleibt nur die Parallelkomponente dB⊥ is
r
pairwise compensated! (zu e z )
µ
r r
ds ⋅ r
dB = o ⋅ I ⋅ 3 , ds ⊥r
4 ⋅π
r
ds ⋅ r
µ
dB = dB ⋅ sin α = o ⋅ I ⋅
⋅ sin α
4 ⋅π
r3
dB⊥
dB||
r
r
z
r
dB
α
α
R
λB⊥
R = r ⋅ sin α
r r
Wegen ds ⊥r :
r ⋅ sin α = R
und nach Summation (Integral) über alle Punkte des Kreises folgt:
B z = ∫ dB =
µo
µ
1
R 2 ⋅ 2 ⋅π µo ⋅ I R 2
⋅ I ⋅ 3 ⋅ R ⋅ ∫ ds = o ⋅ I ⋅
=
⋅ 3
{ 4 ⋅π
4 ⋅π
2
r
r3
r
2⋅π ⋅R
r 2 = R2 + z2 :
Mit
Bz =
I ⋅ µo
⋅
2
R2
2
R +z
2
3
= B( z )
r
3.4.3. Feld eines magnetischen Dipols m
Formel erläutern:
r
r r r
r r
1 m 3 ⋅ r ⋅ (m ⋅ r )
H (r ) = −
⋅ 3 −
4 ⋅π r
r5
r
r
Das Dipolmoment m befindet sich dabei im Koordinatenursprung. Der Vektor r zeigt zu
r r
dem Punkt, wo das Feld H (r ) gegeben ist.
Feldlinienbild diskutieren in Analogie zum Stabmagnet bzw. auch zum elektrischen
Dipolmoment.
3.5. Magnetfelder in Stoffen
29
r
Bringt man Stoffe in ein Magnetfeld, dann ändert sich die Feldgröße B . Dies ist dadurch
zu erklären, daß neben den freien Strömen, die im äußeren Stromkreis fließen und mit
Strommeßgeräten meßbar sind, noch gebundene Ströme fließen. Damit ergibt sich folgende
Situation:
r r
Feld H (r ) :
r r
Feld B(r ) :
erzeugt durch freie Ströme
erzeugt durch freie und durch gebundene Ströme. Gebundene Ströme
können in Stoffen durch freie Ströme hervorgerufen werden. Sie
können auch ständig vorhanden sein (z. B. in Ferromagnetika, usw.).
Diese Ströme lassen sich nur über die in diesen Materialien wirkenden
Kräfte messen.
Beachte Vergleich mit elektrischem Feld
r r
Feld E (r ) :
r r
Feld D(r ) :
verursacht durch freie und gebundene Ladungen
verursacht durch freie Ladungen
Also:
r r
E (r ) [Elektrisch] entspricht
r r
D(r ) [Elektrisch] entspricht
r r
B (r ) [magnetisch]
r r
H (r ) [magnetisch]
r
Wir wissen bereits: Es gibt keine magnetischen Monopole, d. h. alle B - Feldlinien sind
geschlossen. Nord- und Südpole kommen immer nur zusammen vor. Damit muß stets gelten:
r
B
∫∫ ⋅ dA = 0
geschlossene
Fläche A
Beachte:
Die Größe
r r
B
∫∫ ⋅ dA = Φ m
r
Fläche, die von B
durchsetzt wird
heißt magn. Fluß Φ m .
Nach Gaußschem Satz:
r
r
∫∫ B ⋅ dA ≡
A
r
r r
∫∫∫ div B ⋅ dV = 0 ⇒ div B(r ) = 0
eingeschlossenes
Volumen V , nämlich
von geschl . Fläche
r r
Vektor B(r ) im 3D (Euklidischen) Raum:
r r
r
r
r
B(r ) = B x ⋅ e x + B y ⋅ e y + B z ⋅ e z ,
r
Bi = Bi (r ), i = x, y, z
30
r r
r r ∂B
∂B y ∂B z
div B(r ) = ∇ ⋅ B = x +
+
∂x
∂y
∂z
r
∇ = Nablaoperator
r r
r r
Beziehungen zwischen H (r ) und B(r )
(
)
r
r
r r
B = µ ⋅ µo ⋅ H = µo ⋅ H + M
r
r
M = (µ − 1) ⋅ H
Magnetisierung
µ≥1
µ-1
µo
relative Permeabilität
magnet. Suszeptibilität
magnet. Feldkonstante (s. o., Kap. 2.1.)
r
Def.: M ist Magnetisches Moment pro Volumeneinheit
r
r r
M = A ⋅ m −1 (wie Einheit von H (r ) )
[ ]
µ, χ
µ, χ
r r
sind materialabhängige Größen, die von H (r ) und von Temp. T abhängen
können (s. spätere Vorlesungen).
können in anisotropen Materialien auch von Richtung abhängen. Dann spricht
man von µ- und χ- Tensoren.
Allg. Gesetze:
r r r
H
∫ (r ) ⋅ ds = I
⇔
r r
r r
rot H (r ) = j (r )
r r
B
∫∫ ⋅ dA = 0
⇔
r r
div B(r ) = 0
geschl . Weg
um Fläche A
A
r
r
3.6. Drehmoment T auf Leiterschleife im Magnetfeld B
Drehachse
I
I
a
[
r r
r
T = I ⋅ A× B
]
r
A = Fläche = a ⋅ b
r
A ⊥ Fläche
r
r
B = Induktion des Magnetfeldes B
b
⋅
31
r
B
α
b
r
A
r r r
A, B, T = Rechtssystem
r
T steht ⊥ Papierebene
r
T = I ⋅ A ⋅ B ⋅ sin α
α
r
r
r
Die Größe I ⋅ A ist das magnetische Moment der Stromschleife: m = I ⋅ A
Damit gilt auch:
r r r
T = m× B
r r
r
Also: Schleife möchte sich so stellen, daß T = 0 wird, daß also A B (sin α = 0; α = 0) gilt.
Beispiel: Lange Spule mit n Windungen, Strom I:
r
r
m = n⋅I ⋅ A
3.7. Magnetfeldmessungen
3.7.1. Versuche zur Magnetfeldmessung
siehe Folien
3.7.2. Hall – Effekt* (Ergänzungen)
siehe Folien
3.7.3. Magnetfeld der Erde* (Ergänzungen)
siehe Folien
4. Magnetische Induktion
4.1. Faradaysches Induktionsgesetz
Michael Faraday, 1791 – 1867
Ausgangspunkt:
r
- Betrachte langsame zeitliche Änderungen der Ladungsverteilung ρ (r , t ) und der
r r
Stromdichte j (r , t ) ; langsam bedeutet im Vergleich zur Laufzeit des Lichtes (als
r
elektromagn. Welle) über den Bereich von ρ und j .
Induktionsversuche von Michael Faraday, ca. 1831:
r r
Räumliche und zeitliche Änderung des magnetischen Flusses Φ m = ∫∫ B ⋅ dA , A = die vom
A
r
B - Feld durchsetzte Fläche, führt zu einer “induzierten” Spannung U ind :
32
U ind = −
dΦ m
d r r
= − ∫∫ B ⋅ dA
dt
dt A
Das “Minus” – Vorzeichen vermittelt eine Aussage über die Richtung des induzierten
Stromes (Lenz’sche Regel, Heinrich Freidrich Emil Lenz, 1804 – 1865). U ind ist der
Änderung von Φ m entgegen gerichtet; die durch U ind erzeugten Ströme wirken der Änderung
entgegen.
Experimente zum Faradayschen Induktionsgesetz
Lange Spule als Magnet
n⋅I
, B = µo ⋅ H ⋅ µ
L
L = Länge, n Windungszahl
H=
Spule mit N - Windg. mit Galvanometer: Messung von S ∝ ∫ U ⋅ dt oder ∫ I ⋅ dt
Experiment:
(1) Verändere I in Magnet
(2) Verändere N in Spule (N = 150, 300)
(3) Verändere A in Spule (A = A1, 2 ⋅ A1)
(4) Verändere Winkel α
S
S
S
S
S
S
(5) Verändere Material in Magnet
Spannungsstoß
(6) Prüfe: S (t )
Stromstoß
R – Widerstand in Reihe mit
∝I
∝ N ⋅I ∝ H
∝ A∝ H ⋅A
∝ cos α ∝ H ⋅ A ⋅ cos α
r r
∝H⋅A
r r r r
∝ µ ∝ µ⋅H ⋅ A = B⋅ A
S ∝ ∫ U ⋅ dt
Galvanometer: S (t ) ∝ R −1
Ergebnis:
S ∝ ∫ U ⋅ dt , U ∝
(
d r r
B⋅ A
dt
)
33
Versuche:
a)
-
Räumliche Änderung
Bewegen eines Leiters senkrecht zur Feldrichtung eines Magneten
Versuche mit Drahtschlinge, verbunden mit Galvanometer
Stabmagnet in Spule hineinschieben und herausziehen
b) Zeitliche Änderung
- Zwei Spulen, deren Felder sich gegenseitig durchdringen. Wenn sich B in einer Spule
zeitlich ändert, wird in der anderen Spule eine Spannung induziert.
- Kopplung zwischen Spulen wird dadurch erhöht, daß Spulen durch Eisenkern miteinander
verbunden werden.
Einheit von Φ m :
[Φm] = 1⋅ T ⋅ m-2 = 1 ⋅ Wb = 1 ⋅ Weber = 1⋅ V ⋅ s
Wilhelm Weber, 1804 – 1891, Göttingen – Leipzig.
Ergänzung:
In einem supraleitenden Ring ist der magnetische Fluß quantisiert in Einheiten des Flußquants
h
Φo =
= 2.06783461 ⋅ 10 −15 ⋅ Wb , h = Plancksche Konstante, e = (Betrag der)
2⋅e
Elementarladung.
Ausgedehnte Leiter
Die induzierten Ströme, d. h. die durch die induzierte Spannung erzeugten Ströme, nennt man
auch Wirbelströme.
Versuch:
Waltenhofensches Pendel
Anwendung:
Bremsung in elektrisch angetriebenen Fahrzeugen
4.2. Selbstinduktion L
Ausgangspunkt
Für techn. Anwendungen von Spulen oder allgemein Leiteranordnungen ist es zweckmäßig,
r
den magnetischen Fluß Φ m (bzw. die darin eingehenden Felder B ) durch den
augenblicklichen Wert I(t) der Stromstärke zu beschreiben.
Definition L:
r r
Φ m = ∫ B ⋅ dA = L ⋅ I
def.
34
[L] = 1 ⋅ V ⋅ s = 1 Henry = 1 ⋅ H
A
Selbstinduktionskoeffizient, Selbstinduktivität
Damit:
U ind = − L ⋅
dI
= − L ⋅ I&
dt
Beispiel:
Zylinderspule, Länge l, Querschnitt A << l2, Windungszahl N, Vakuum mit µ 0 .
Es wurde im Seminar (vgl. Kap. 3.3.2.) gezeigt: B = µ 0 ⋅ I ⋅ N l (homogen, d. h. konstant
über Fläche A)
I
A
N Windungen, Länge l
Φm = N ⋅ B ⋅ A = [µo ⋅ N2 ⋅ A/l] ⋅ l
L
4.3. Energie und Energiedichte im Magnetfeld
Beispiel:
Abschalten eines Gleichstromes durch Spule (mit L) und Ohmschen Widerstand (R)
Vor Abschalten nach Kirchhoffscher Regel
U = R ⋅ I = U 0 + U ind = U 0 − L ⋅ I&
Abschalten zur Zeit t = 0, Lösung der Differentialgleichung erster Ordnung mit Bedingung
35
I (t = 0) = I o =
Uo
R
liefert uns:
I (t ) = I o ⋅ e −t τ ,
τ=
L
Zeitkonstante der Dämpfung
R
Suche jetzt Joulesche Wärme am Widerstand R
∞
W Joule = ∫ I 2 (t ) ⋅ R ⋅ dt =
0
1
⋅ L ⋅ I o2
2
Diese Energie ist der Energie gleich, die im Magnetfeld der Spule gespeichert ist:
Wmagn = WJoule
Für lange Zylinderspule gilt z. B. (s. Kap. 4.2.)
L = µo ⋅ N 2 ⋅ A l
B = µo ⋅ H = µo ⋅
Wmagn =
bzw.
N ⋅ Io
bzw.
l
1
⋅ B ⋅ H ⋅V ,
2
N2 ⋅A
l
(mit eingeschobenem Material
relativen Permeabilität µ )
L = µ ⋅ µ0 ⋅
der
B = µ ⋅ µo ⋅ H
V=A⋅l
Allgemeiner Ausdruck für Energie
Wmagn = ∫ wmagn ⋅ dV
wmagn =
1 r r
⋅B⋅H
2
Energiedichte
Allgemeine Definition für L
L=
r r
1
⋅ B ⋅ H ⋅ dV
2 ∫
Io V
36
4.4. Gegeninduktion. Gegeninduktivität Lik
Beachte:
r
Mehrere getrennte Leiterkreise, in denen Ströme Ik fließen und beachte, daß Gesamtfeld B
r
sich additiv aus den Einzelfeldern Bk zusammensetzt:
r
r
B = ∑ Bk
k
Dann ist auch der Gesamtfluß Φi durch den Fluß des Kreises i (Strom Ii) und additiv durch
den von den anderen Kreisen (k ≠ i) herrührenden Anteilen Φik bestimmt:
r
r
Φ i = ∑ Bk ⋅ dAi =∑ I k Lik
k
k
Def. von Lik
U ind ,i = −Φ& i = −∑ Lik ⋅ I&k
k
− Lii ⋅ I&i , Lii = Selbstinduktivität
− Lik ⋅ I&k , Lik = Gegeninduktivität
k ≠i
Es muß gelten: Lik = Lki (Reziprozität)
5. Magnetismus
r
Def. der Magnetisierung M in Verbindung mit der Beziehung:
(
)
r
r
r
r
B = µ0 ⋅ H + M = µ ⋅ µo ⋅ H
r
r
r
M = (µ − 1) ⋅ H
= χ ⋅H
r
r Magnetisches Moment m
Magnetisierung M =
Volumen
r
r
m
M =
V
k
r
[mr ] = A ⋅ m 2 , M = A
m
r
r
m = ∑ mk ,
[ ]
5.1. Diamagnetismus
- Diamagnetismus bei Stoffen, d. h. Atome, Moleküle, Festkörper, wobei kein permanentes
magnetisches Dipolmoment vorhanden ist.
r
- Im Magnetfeld entstehen induzierte Dipole m(ind ) , die so gerichtet sind, daß ihr Magnetfeld
dem äußeren Magnetfeld entgegen gerichtet ist.
r
r
- Also: M = χ ⋅ H (s. oben), mit χ < 0, µ < 1
37
r
- Energie W im Magnetfeld, Kraftwirkung F
r r
W = −m ⋅ B
r r r
r
∂W
Falls B = B(r ) (inhomogenes Feld) wirkt die Kraft F = − grad W = − r , d. h. da
∂r
r
m = const.
r
r r
r
F = (m ⋅ grad ) ⋅ B(r )
r
r
r m
r
χ r
Da M = = χ ⋅ H =
⋅ B , folgt für F :
µo
V
(
)
r χ ⋅V r
r
F=
⋅ B ⋅ grad ⋅ B .
µo
r
Da µ − 1 = χ < 0 , wirkt Kraft nach außen, wo Feld B schwächer wird.
Versuch:
Ein diamagnetischer Körper wird aus Magnetfeld herausgedrängt.
Versuch:
Bei supraleitenden Stoffen existiert im Inneren kein Magnetfeld; sie sind ideale diamagn.
Stoffe.
Folie:
Zusammenfassende Erläuterungen zum Diamagnetismus
5.2. Paramagnetismus
r
- Atome mit permanenten magnetischen Dipolmomenten m
r
- Magnetismus durch Orientierung der Dipole m im Magnetfeld:
ohne Magnetfeld
r
χr⋅ Hr schwache Felder
r
M H komplizierte Abh. Von H
und dann Sättigung bei
wachsendem Feld
r 1
r
M = ⋅ ∑ mi =
V i
( )
r
r
- Falls M = χ ⋅ H , χ > 0, µ > 1 , dann
χ = N ⋅ µo ⋅
1
m2
3⋅ k ⋅T
=
C
T
Curie – Gesetz
38
1
N
:
µo :
k
:
T
:
2
m :
Anzahl der magn. Dipole pro m-3 (V – Einheit)
magn. Feldkonstante
Boltzmann – Konstante
Temperatur in K
Quadr. Mittelwert des magnetischen Momentes (falls Fluktuationen vorhanden,
r
sonst m 2 = m 2 )
Versuch:
Paramagn. Stoffe werden ins Feld hieingezogen. Z. B. Steighöhe einer paramagnet.
Flüssigkeit im Magnetfeld, völlige Analogie zur Steighöhe einer dielektrischen Flüssigkeit im
elektr. Feld.
5.3. Ferromagnetismus
- Substanzen, in denen Bereiche geordneter magntischer Momente vorhanden sind (z. B.
magnetische Momente in Verbindung mit Elektronen – Spin und Elektronen – Bahn –
Momenten).
- Existenz einer spontanen Magnetisierung ohne Wirkung eines äuß. Magnetfeldes (z. B.
Permanentmagnete ⇒ Ferrit – Materialien, etc.)
- Die Ordnung der magn. Momente hängt von Kristallstruktur ab (⇒ Festkörpereigenschaft).
r
r
r
r
- Im Magnetfeld H ist M = χ ⋅ H im allg. nicht linear von H abhängig:
r
χ >> 0, χ = χ H , T ist im allg. anisotrop ( χ ist tensorielle Größe!)
- Damit: Wichtige Eigenschaften sind Remanenz – Magnetisierung, Koerzitivfeld, Hysterese
– Eigenschaften
(
)
Versuch:
Hysterese – Schleife
MR = Remanenz – (Magnetis)
HC = Koerzitiv – Feld
Wenn eingeschlossene Fläche klein ist,
magnetisch weiches Material ⇒ geringer
Energieverlust beim Ummagnetisieren.
Versuch:
Ferromagn. Materialien werden oberhalb einer Temp. TC (Curie – Temp.) paramagnetisch.
Dann gilt für T > TC:
χ=
C
T − TC
Curie – Weiss – Gesetz
39
Versuch:
Barkhausen – Sprünge: Hörbarmachung des Umklappens der (geordneten) Weiss’schen
Bezirke.
Folien:
Ferromagnetische Ordnung als Kristalleigenschaft; Spinordnung in Ferro- und AntiferroMagneten
6. Wechselströme
6.1. Darstellung von Wechselstrom und –spannung
Es sei ein sinus- oder cosinus-förmiger Strom I (t ) oder eine Spannung U (t ) gegeben.
U (t ) = U o ⋅ sin (ω ⋅ t + ϕ ′)
T=
T=
2 ⋅π
Periode
ω
ω = 2 ⋅ π ⋅ f Kreisfrequenz
ϕ ′ , ϕ ′′ =
Phasenwinkel
Uo =
maximale Auslenkung,
Amplitude
Wechselstrom I (t ) , der durch Wechselspannung am Widerstand erzeugt wird:
I (t ) = I o ⋅ sin (ω ⋅ t + ϕ ′′) , im allg. gilt: ϕ ′ ≠ ϕ ′′ .
6.2. Leistung Pel des Wechselstromes
Momentan:
Pel (t ) = U (t ) ⋅ I (t )
Mittelwert über Periode T:
T
1
Pel = ⋅ ∫ Pel (t ) ⋅ dt
T 0
Mit Hilfe des Additionstheorems folgt:
sin α ⋅ sin β =
1
⋅ [cos(α − β ) − cos(α + β )]
2
α = ω ⋅ t + ϕ ′′ , β = ω ⋅ t + ϕ ′ , α − β = ϕ ′′ − ϕ ′ = ϕ ,
α + β = 2 ⋅ (ω ⋅ t ) + ϕ ′ + ϕ ′′
40
also:
T
1
1
Pel = ⋅ U 0 ⋅ I 0 ⋅ cos ϕ − ⋅ ∫ U 0 ⋅ I 0 ⋅ cos(2 ⋅ ω ⋅ t + ϕ ′ + ϕ ′′) ⋅ dt
2
T 0
1444442444443
=0
Pel =
U eff =
PBlind =
1
2
1
⋅ U 0 ⋅ I 0 ⋅ cos ϕ = U eff ⋅ I eff ⋅ cos ϕ
2
⋅ U 0 , I eff =
1
2
Wirkleistung
⋅ I 0 (bei sinus-förmigem Strom und Spannung!)
1
⋅ U 0 ⋅ I 0 ⋅ sin ϕ
2
Blindleistung: nicht wirklich verbraucht,
sondern von Wechselstromwiderständen
aufgenommen.
6.3. Wechselstromwiderstände (Impedanzen)
Versuch:
Zeige, daß Spule (mit L = Selbstinduktion) und Kondensator (mit C = Kapazität) einen
bestimmten, frequenzabhängigen Widerstand besitzen.
Beachte dazu folgende Reihenschaltung
R
L
C
UR
UL
UC
U(t)
Kirchhoff:
U (t ) = U R + U L + U C
I (t ) = I R = I L = I C
Sei
I (t ) = I 0 ⋅ cos(ω ⋅ t ) .
a)
U R = R ⋅ I = R ⋅ I 0 ⋅ cos(ω ⋅ t )
b)
U L = −U ind = L ⋅
dI
π
= − L ⋅ ω ⋅ I 0 ⋅ sin (ω ⋅ t ) = L ⋅ ω ⋅ I 0 cos ω ⋅ t +
dt
2
Lenzsche Regel
XL =ω ⋅L
ist der Betrag des induktiven Widerstandes.
41
Beachte: UL ist gegenüber IL = I um +
π
⋅ (+ 90°) in Phase verschoben.
2
c)
1
Q 1
= ⋅ ∫ I (t ) ⋅ dt =
⋅ I 0 ⋅ sin (ω ⋅ t )
ω ⋅C
C C
1
π
=
⋅ I 0 ⋅ cos ω ⋅ t −
ω ⋅C
2
1
XC =
ist der Betrag des kapazitiven Widerstandes.
ω ⋅C
UC =
Beachte: UC ist gegenüber IC um −
π
⋅ (− 90°) in Phase verschoben.
2
Darstellung der Phasenverschiebungen mittels Zeigerdiagramm (“Vektor”- Darstellung)
UL
+ 90°
I, UR
- 90°
UC
6.4. Komplexe Wechselstromrechnung
Wesentlicher Inhalt
Verknüpfung der Zeigerdarstellung mit den Eulerschen Formeln aus der Rechnung mit
komplexen Zahlen z : z = a + ib = a 2 + b 2 ⋅ e iϕ , wobei z = a 2 + b 2 , e iϕ = cos ϕ + i sin ϕ ,
ϕ = Phasenwinkel, a = Realteil, b = Imaginärteil, i2 = -1 (i = komplexe Einheit).
Komplexe Schreibweise:
I = I 0 ⋅ cos(ω ⋅ t )
{
U = Re{I
I = Re I 0 ⋅ e iω ⋅t
→
U = U 0 ⋅ cos(ω ⋅ t + ϕ )
→
0
}
⋅ e iω ⋅t ⋅ e iϕ
}
Beispiel: Reihenschaltung von R, L, C (s.o.)
U (t ) = U R
= R ⋅ I (t )
+
+
UL
π
i
2
+ X L ⋅ I (t ) ⋅ e{ +
=+ i
UC
−i
π
2
X C ⋅ I (t ) ⋅ e{
=−i
42
1
= R + i ω ⋅ L −
⋅ I (t )
ω ⋅ C
1
Z = R + i ω ⋅ L −
ω ⋅C
komplexer Widerstand (Impedanz)
Im
tan ϕ =
iωL
ω⋅L−
1
ω ⋅C
R
1
z = R + ω ⋅ L −
ω ⋅C
2
2
i(ωL -
1
)
ωC
Z
ϕ
Re
R
Parallelschaltung von R, L, C
U = U 0 ⋅ cos(ω ⋅ t )
R
Nach Kirchhoff
U = U R = UC = U L
C
I = I R + IC + I L
L
1 1
1
ω ⋅ C 1 iϕ
= +
+ −
⋅e
=
Z R iω ⋅ L
i Z
1
=
Z
2
1
1
+ ω ⋅ C −
,
2
ω⋅L
R
tan ϕ =
1
ω ⋅ L = R(ωC − 1
1
ωL
R
ω ⋅C −
Lineare Netzwerke
Def. Zwischen I und U gibt es stets eine lineare Beziehung: U = Z ⋅ I
Anwendungen: Hochpaß, Tiefpaß, Frequenzfilter
U 1 =Eingangsspannung, U 2 =Ausgangsspannung
43
-Tiefpass: lässt Frequenzen unter f G =
1
passieren
2πRC
1
U2
1
jωC
=
=
1
U1
1 + ω 2 R 2C 2
R+
jω C
-Hochpass: lässt Frequenzen über f G =
U2
=
U1
R
R+
1
jω C
=
1
passieren
2πRC
ωCR
1 + ω 2 R 2C 2
-Frequenzfilter/ Bandpass: lässt Frequenzen um f G =
1
mit maximaler Intensität
2πRC
passieren
U2
=
U1
R
jωC
1
R+
jω C
R
1
jω C
R+
+
1
jω C
R+
jωC
=
1
3 + j (ωRC −
1
)
ωRC
44
Wichtig ist dabei generell:
Die Phasenverschiebung ist Null, falls gilt: ω 2 =
Resonanzfrequenz ω = ω 0 =
1
L ⋅C
1
. Dies führt zur Definition einer
L ⋅C
.
7. Elektromagnetische Schwingungen
7.1. Der Schwingkreis
1
- Z = i ω ⋅ L −
ω ⋅C
C
L
- Resonanz bei Z = 0 : ω 02 =
1
L ⋅C
1
⋅ C ⋅U 2
2
1
( =ˆ potentieller Energie ) und Wm = ⋅ L ⋅ I 2
2
( =ˆ kinetischer Energie ) ohne Verluste im Idealfall
(⇒ ungedämpfte Schwingung)
- Jeder Schwingungskreis besitzt noch ROhm, d. h. Verluste ⇒
gedämpfte Schwingungen
- Periodischer Wechsel von
Wel =
7.2. Schwingungsgleichung
Betrachte wieder Serienkreis
R
L
C
S
Erregen des Schwingkreises, dann S schließen
U R +UC +U L = 0
I ⋅R+
(s. voriges Kapitel 6.3.)
1
dI
⋅ ∫ I ⋅ dt + L ⋅
=0
C
dt
Differentiation nach Zeit t:
I
I& ⋅ R + + L ⋅ I&& = 0
C
Division mit L:
I&& + ω 02 ⋅ I + 2 ⋅ γ ⋅ I& = 0
ω 02 =
1
R
, 2 ⋅ γ = , I (t ) = Strom
L ⋅C
L
45
Schw.-Glch. für gedämpfte Schwingg. in Analogie zur Mechanik; wo an Stelle von I (t ) ⇒
Auslenkung x(t ) aus Ruhelage.
7.3. Lösg. der Glch. für gedämpfte Schwingungen
Bedingung:
R2
1
<
2
L ⋅C
4⋅ L
Allg. Vorgehen:
Verwende Ansatz I (t ) = A ⋅ e λ ⋅t in Schw.-Gl. und bestimme A, λ durch Vergleich.
Ergebnis:
I (t ) = A1 ⋅ e λ1 ⋅t + A2 ⋅ e λ2 ⋅t
λ1, 2 = −
R
R2
1
±
−
= −α ± β
2
2⋅ L
L ⋅C
4⋅L
Für gedämpfte Schwingungen ist β = iω R rein imaginär, und es fogt nach Umformungen:
I (t ) = I 0 ⋅ e −α ⋅t ⋅ cos(ω R ⋅ t + ϕ )
1
R2
ωR =
−
= ω 02 − γ 2
2
L ⋅C 4⋅ L
R
α =γ =
L
(Resonanzfreq. bei ged. Schwingung)
(Dämpfungskonstante)
Max. zweier aufeinanderfolgender Perioden:
IN
= e −α ⋅T
I N +1
⇒
I
ln N = −α ⋅ T
I N +1
log. Dämpfungsdecrement
46
7.4. Weitere Lösg. der Schw.-Gleichg.
- Kriechfall
β ist reell,
R2
1
>
2
L ⋅C
4⋅ L
α
I (t ) = I 0 ⋅ e −α ⋅t ⋅ cosh (β ⋅ t ) + ⋅ sinh (β ⋅ t )
β
sei: I (t = 0 ) = I 0 , I&(t = 0 ) = 0
- Aperiodischer Grenzfall
R2
1
β = 0,
=
2
L⋅C
4⋅ L
I (t ) = e −α ⋅t ⋅ (I 0 + B ⋅ t )
Sei I (t = 0 ) = I 0 , dann langsame Zunahme für kleine Zeiten und aperiodische Abnahme auf
I (t = ∞ ) = 0 .
7.5. Erzwungene Schwingungen
R
C
U(t)
L
a) Serienschwingkreis
U(t)
C
R
L
b) Parallelschwingkreis
U(t) wirkt ständig
Wir betrachten nur a).
47
U R + U C + U L = U (t ) ⇔ U 0 ⋅ e iω ⋅t
(komplexe Schreibweise)
I (t ) = I 0 ⋅ e iϕ ⋅ e iω ⋅t
I ⋅R+
(komplexe Schreibweise
für Ansatz)
1
⋅ ∫ I ⋅ dt + L ⋅ I& = U 0 ⋅ e iω ⋅t
C
i
iϕ
iω ⋅t
iω ⋅t
R − ω ⋅ C + iω ⋅ L ⋅ I 0 ⋅ e ⋅ e = U 0 ⋅ e
I 0 ⋅ e iϕ
1
U 0 ⋅ R − i ω ⋅ L −
ω ⋅ C
U0
U0
=
=
=
2
1 Z
1
2
R + i ω ⋅ L −
R + ω ⋅ L −
ω ⋅C
ω ⋅C
1
Z = R + i ω ⋅ L −
ω ⋅C
Wechselstromwiderstand (s. u.)
oder Scheinwiderstand
− tan ϕ =
1
2
2
ω ⋅ C = ω − ω0 ,
R
2 ⋅γ ⋅ω
ω⋅L−
2 ⋅γ =
R
L
2
1
Z = R 2 + ω ⋅ L −
ω ⋅C
U
U0
U
2 ⋅γ ⋅ω
I0 = 0 =
= 0⋅
2
Z
R
1
4 ⋅ γ 2 ⋅ ω 2 + ω 2 − ω 02
R 2 + ω ⋅ L −
ω ⋅C
(
a) Stromamplitude für Serienkreis
)
2
b) Stromamplitude für Parallelkreis
Leistungsaufnahme im Schwingkreis bei Serienresonanz
48
Bereits behandelt:
Momentane Leistung P(t ) = U (t ) ⋅ I (t ) wird gemittelt über eine Periode T =
P = PWirk =
2 ⋅π
ωR
:
1
⋅ I 0 ⋅ U 0 ⋅ cos ϕ
2
In komplexer Schreibweise:
P=
1
1
⋅ I (t ) ⋅ U * (t ) = PW + i ⋅ ⋅ I o ⋅ U o ⋅ sin ϕ
2
2
Def
PB, Blindleistung
Nur der Realteil PW ist meßbar!
Damit: Leistungsaufnahme im Schwingkreis bei Serienresonanz einfach zu berechnen:
Wir gehen wieder aus von der komplexen Schreibweise:
P=
1
1
1 U2
⋅ I ⋅ U * = ⋅ I 0 ⋅ e iϕ ⋅ U 0 = ⋅ 0
2
2
2 Z
Bei Resonanz gilt: ϕ = 0, Z = R
Der Maximalwert von P beträgt dann:
Pmax
1 U 02 1 2
= ⋅
= ⋅ I0 ⋅ R =
2 R
2
Maximalwert der Wirkleistung, die bei
Resonanz im Schwingkreis verbraucht
wird.
Resonanzbreite:
Frequenzdifferenz ∆ω 1 / 2 = ω 2 − ω 1 ,
Frequenzen, bei denen im Ausdruck für
2
1
2
Leistung P: ω ⋅ L −
=R
ω
⋅
C
oder, mit
(ω
2
− ω 02
)
2
= 4 ⋅γ 2 ⋅ω 2
ω 2 − ω 02 = ±2 ⋅ γ ⋅ ω
ω1/2 = mγ + ω 02 + γ 2
ω 2 − ω 1 = 2 ⋅ γ = R L = ∆ω 1 / 2 = 2 ⋅ π ⋅ ∆ν 1 / 2
49
γ = π ⋅ ∆ν 1/ 2
vgl. Versuch: Messung der Dämpfungskonstanten γ = 1 τ
8. Elektromagnetische Wellen
8.1. Maxwellsche Gleichungen
(i)
Die
bisher
abgeleiteten
Zusammenhänge
erst
vollständig, wenn man
r
r
Verschiebungsstrom einführt, dessen Stromdichte durch D& gegeben ist. Die Größe D&
schließt den Stromkreis in einem Kondensator.
(ii)
Maxwellsche Gleichungen
1. Coulombsches Gesetz. Gesetz von der umschlossenen Ladung
Integrale Form
r
r
r
∫∫ D ⋅ dA = Q(r , t )
sind
Differentielle Form
bzw.
r
r
div D = ρ (r , t )
2. Verallg. Ampèresches Gesetz mit Verschiebungsstrom. Verallg. Durchflutungsgesetz
r r
r r
∫ H ⋅ dr = I + ∫∫ D& ⋅ dA
bzw.
r r r
rot H = j + D&
bzw.
r
r
rot E = − B&
A
3. Induktionsgesetz
r r
U ind = ∫ E ⋅ dl = − dΦ m dt
r r
Φ m = ∫∫ B ⋅ dA
4. Quelldichte der magn. Induktion ist Null, geschlossene Feldlinien, keine magn.
Monopole
r r
B
∫∫ ⋅ dA = 0
bzw.
r
div B = 0
Materialgleichungen für homogenes Medium:
r
r
r
r
,
D = ε ⋅ε0 ⋅ E
B = µ ⋅ µ0 ⋅ H
Ohmsche Gesetz in differentieller Form:
r
r
j =σE
σ ...entspricht Leitfähigkeit
zu 2. Existenz des Verschiebungsstromes:
-
begründet Existenz elektromagnetische Wellen
r
D spielt bei nicht all zu hohen Frequenzen keine Rolle
r
r
r
D = ε ⋅ ε 0 ⋅ E = ε ⋅ ε 0 E 0 e iϖ t
50
r
r
r
iϖε ⋅ ε 0 r
J ges = j + iϖε ⋅ ε 0 ⋅ E = σ (1 +
)E
σ
Zahlenwerte: σ =
1
ρ
=
1
1,678 * 10 −8 Ω
( für Cu ,20°C ) wobei ρ der spez. Widerstand ist
ε0
= 1,5 * 10 −19 s
σ
r
ω
Damit gilt also: D ist vernachlässigbar für
kleiner 1019 Hz
2π
Allerdings: für andere Stoffe sind die Frequenzen nicht so hoch,
z.B. Diamant
ε0
ω
kleiner 1010 Hz
= 2,4 * 10 −11 s hier
σ
2π
8.2. Elektromagnetische Wellen im Vakuum (ohne Beweise!)
r
Betrachte die Maxwellschen Gleichungen im ladungsfreien ( ρ = 0 ) und stromfreien ( j = 0 )
Vakuum, wo ε = µ = 1 gelten muß.
Betrachte hier nur differentielle Form:
r
r
rot E = − B&
r
r
rot H = + D&
r
div D = 0
r
div B = 0
r
r
r
r
Unter Verwendung von D = ε ⋅ ε 0 ⋅ E und B = µ ⋅ µ 0 ⋅ H (beachte ε = 1, µ = 1 , falls Vakuum),
folgt nach einigen Umformungen unter Verwendung von Regeln der Vektoranalysis:
r
r r r
r ∂B
r
∂ r
∂2 r
Mit ∇ × (∇ × E ) = −∇ ×
= − (∇ × µ 0 ⋅ H ) = − µ 0 ε 0 2 E folgt:
∂t
∂t
∂t
r
r 1 ∂2E
∂2
∂2
∂2
∆E = 2 ⋅ 2 , ∆ = 2 + 2 + 2
∂x
∂y
∂z
c0 ∂x
(Laplace - Operator)
Wellengleichung
r r r
Bsp.: Lösung für fortschreitende Wellen in Richtung k k , k = {k x , k y , k z }, Wellenzahlvektor
[(
)]
r r
r r
r
→ E (r , t ) = E 0 ⋅ exp i ω ⋅ t − k ⋅ r
mit
r
r2
2 ⋅π
k 2 = k 2 = k x2 + k y2 + k z2 = k , k =
λ
λ = Wellenlänge, ω = 2 ⋅ π ⋅ν = Kreisfrequenz
51
und der Bedingung
2
k =
→
ω2
c02
⇒
c 02 =
ω2
k
2
, c0 =
ω
k
c 0 ist Ausbreitungsgeschwindigkeit im Vakuum.
Es folgt (mit ε = µ = 1 )
c0 =
1
ε 0 ⋅ µ0
r
→ E 0 Polarisation der Wellen
r
→ B - Feld der elektromagnetischen Welle
rr
r
ks
mit u = ωt − k r = ωt − s = (t − )ω , s sei dabei die Projektion der Raumrichtung r auf die
ω
r
ks
s
Ausbreitungsrichtung k , erhält man die retardierte Zeit t R = t − = t − , das
c0
ω
r
elektrische Feld an der Stelle r ist durch die retadierte Zeit charakterisiert:
(
r 1 r r
B = ⋅ k ×E
ω
)
Vektorgleichung, beschreibt begleitendes Dreibein
r r r r r r
B⊥E , E⊥k , B⊥k
Transversale Welle:
r r r r
k ∝ E×H = S
r
S = Poynting – Vektor
r
S : Vektor für Energiestromdichte
52