Direktes Problem
Werbung

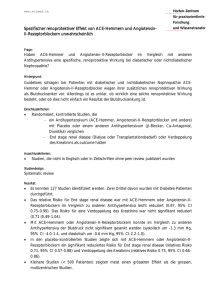
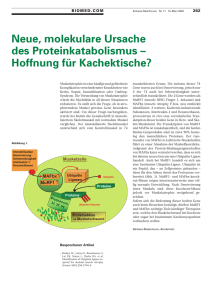
Schätzung von Modellparametern in PBPK Direktes Problem vs. Inverses Problem Direktes Problem: gegeben • Kompartimentenmode ll K, • Parameter p • Input x cause or input (x) gesucht • Output y z.B.Konzentration Model (K) Parameter ( p ) effect or output (y) ? Direktes Problem vs. Inverses Problem Ein inverses Problem: gegeben • Kompartimentenmodell K, • Output y • Input x cause or input (x) gesucht • Parameter p (model identification) Model (K) Parameter ( p ) ? effect or output (y) Ein Beispiel Lösen des Gleichungssystems: Gx=y • y zu bestimmen ist einfach (Matrix*Vektor) • x oder G zu bestimmen kann bei größeren Matrizen aufwendig sein, da eine, keine oder unendlich viele Lösungen existieren können. Parameter aus Experimenten • Im letzter Vortrag: Näherungsweise Bestimmung eines Parameter durch einen anderen. • Jetzt: Aus experimentellen Daten werden Parameter zur Benutzung in PBPK gefittet. Idee Gemessene Konzentrationen in einem Kompartiment y1,y2,y3,..... Berechnete Konzentrationen y(p,t1), y(p,t2), y(p,t3),..... Wir versuchen den Euklidischen Abstand zwischen den Vektoren zu minimieren. Minimierungsproblem Objektivfunktion • Zu minimieren: euklidische Norm von g(p)= [experiment] - [modell] = g(p)= yexp - y(p,t) • d.h. min g ( p) p 2 (ein nicht-lineares Problem) auf der Suche nach dem Minimum • Lokal: Wo ist das nächste Tal? • Global: Wo ist das tiefste Tal? Optimierungsmethode direkte Optimierung – – Simplex (lineare Programmierung) Nelder-Mead lokale Optimierung (ableitungsbasiert) • Steepest Descent • Newton Methode ersten Grads • • Conjugate Gradient Quasi-Newton globale Optimierung - „Brute-force“ – – Simulated Annealing genetische/evolutive Algorithmen Newton Methode 1. Grads • Wir tauschen –ein nicht-lineares Problem • gegen –viele lineare Probleme –in einem iterativen Verfahren Linearisierung • wir tauschen das nicht-lineare: min g ( p) p 2 • gegen 1. Ordnung Taylor Linealisierung min g ( p) g ' ( p)p 2 p • da die Funktion und ihre Quadrat monoton anwachsen min g ( p) g ' ( p)p p 2 2 Taylorentwicklung • um gegebenen Punkt pk g ' ' ( pk )p 2 g ( n ) ( pk )p n g ( pk p) g ( pk ) g ' ( pk )p ... ... 2! n! • ursprüngliche Funktion Taylorentwicklung 1. Ordnung g ( p p) g ( p) g ' ( p)p 2 2. Ordnung g ' ' ( p)p 2 g ( p p) g ( p) g ' ( p)p 3 2! z.B. um Punkt pk=3.0 Lösung der linearen Gleichung min g ( p) g ' ( p)p pk einmal pro Iteration 2 2 Newton Methode (auch Gauss-Newton-Raphson-Simpson-Fourier) • Parametersatz am Anfang p0 schätzen • bis p < Toleranz: 1. Löse Gleichungssystem zu Parametern pk 2. Setze g(pk)= [experiment] - [modell]= yexp - y(t,pk) 3. Berechne Ableitung g’ gegen p numerisch 4. Löse Minimierungsproblem also 5. Setze g ( pk ) g ' ( pk )p p [ g ' ( pk )T g ' ( pk )]1[ g ' ( pk )T g ( pk )] pk 1 pk p 2 Dicloxacillin Hintergrund: • Penicillin ähnliches Antibiotikum • Wird bei bakteriellen Infektionen der Haut gegen ein weites Spektrum gram-positiver Bakterien eingesetzt. • Inhibiert die Zellwandsynthese • Verhindert Quervernetzung Dicloxacillin Das PBPK-Toolbox Programm modelliert die Konzentration von Dicloxacillin in den Venen. Dabei werden folgende Parameter benutzt: • 1. f_muscle 0.48521 Fraction that equilibrates between blood and muscle tissue in one pass • 2. T_renal 3.22817 renal clearance Dicloxacillin - Curve fitting Dicloxacillin • Zuvor exakte Konzentrationen ausrechnen direktes Problem lösen. Dicloxacillin Parameter 1 • renal clearance Parameter 2 f_muscle Dicloxacillin Contour Plot Dicloxacillin Konvergenz für verschiedene Startwerte Rot [0,1;6,0] Blau [0,9;5,0] Grün [0,5;9,0] Dicloxacillin 3D Contour Plot Konvergenz • Wenn g(p) eine konvexe Funktion und p € P, P konvex dann ist das lokale Optimum auch das globales Optimum • Konvexe Funktion Hesse-Matrix positiv definit das heißt alle Eigenwerte > 0 • Schlechter Startwert(vermuteter Parameter) Schlechte Konvergenz • Vergrößerung des Konvergenzbereichs: Dämpfungsstrategie Berechnung von R2 Genetische Algorithmen Start Population Selektion Fittestes Individuum Abbruch? Crossover Mutation GA für Parameterschätzung • Individuen – Chromosomen sind Funktionsparameter p = (p1,...,pk) – Fitness: g ( pk ) 2 • Crossover zwischen Individuen (X, Y) – Tausch von zufälligen Parametern i: pxi = pyi, pyi = pxi • Mutation: zufällige Änderungen in p Simulated Annealing • Analogie mit Moleküldynamik • Energie g ( p) 2 Bilder © Accelerys, Inc. Umgehung von lokalen Minima Nelson and Cox - Lehninger Principles of Biochemistry – p195 Simulated Annealing Startwerte Vektor p0 pk mit zufälliges p akzeptieren? ja beste Werte pk ja konvergiert? nein T wird gesenkt nein SA für Parameterschätzung • Akzeptanzkriterium Steigt die „Energie“? g ( p) 2 nein: akzeptieren mit Wahrsch=100% g ( pk ) ja: akzeptieren exp mit Wahrsch= • konvergiert wenn… – T ist minimal – Maximale Schrittanzahl erreicht – Keine Verbesserung seit N Schritten 2 g ( pk 1 ) T 2 Referenz • • • • • • • Tamar Schlick; “Molecular Modeling and Simulation”; Chap. 10 on Multivariate Minimization in Computational Chemistry; Springer Verlag NY 2002 Harvey.Greenberg; “Mathematical Programming Glossary”; University of Colorado at Denver; carbon.cudenver.edu/~hgreenbe/glossary John A. Jacquez, „Compartmental Analysis in Biology and Medicine“, Kap. 1, 2, 4 und 7.4 Charles W. Groetsch, „Inverse problems in the mathematical sciences“, Kap. 3.1 und 3.3 Aarts and Korst; „Simulated Annealing and Boltzmann Machines: A stochastic approach to combinatorial optimization and neural computing“; Wiley 1989 W. Kinnebrock; „Optimierung mit genetischen und selektiven Algorithmen“; Oldenburg 1994 Lawrence Davis; „Genetic Algorithms and Simulated Annealing“; Pitman 1987