B1-10Fo3 - Bionik TU
Werbung

Ingo Rechenberg
PowerPoint-Folien zur 3. Vorlesung „Bionik I“
Evolutionistische Bionik auf dem Prüfstand
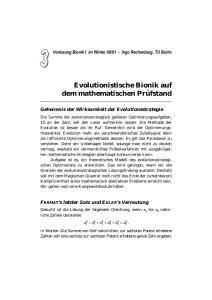
Der Fundamentalbeleg der Bionik
Am Anfang war die
Bionik
Evolution
Synthetische
Evolutionstheorie
Ernst Mayer 1904 - 2005
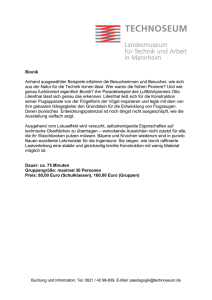
Mutation
Rekombination
Gentransfer
Isolation
Migration
Gendrift
Synthetische Theorie der Evolution
Genpool
der
Population
Selektion
Eine einfache Theorie der Evolution
Nur Mutation und Selektion
Evolutionsstreit
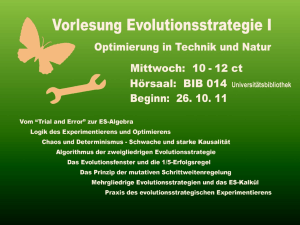
Windkanal
Flexible Stahlhaut
Formgebungsproblem
Tragflügelprofil
Idee für ein mechanisches
Evolutionsexperiment (1964)
„Darwin“ im Windkanal
Schlüsselexperiment mit der Evolutionsstrategie
1964
Zahl der Einstellmöglichkeiten:
515 = 345 025 251
xi
2 3
1
4
5
x1
x2
x3
x5
x4
5 4 3 2 1 0
+1 + 2 +3 + 4 + 5
Fiktive Mutationsmaschine
GALTONsches Nagelbrett
1
2
3
4
5
6
7
8
9
10
11
12
W id e rs ta n d
6
E rg e b n is
4
2
0
0
40
80
120
160
200
240
280
M u ta tio n e n
320
Künstliche Evolution: Gelenkplatte im Windkanal
Ändern
der
Umwelt
W id e rs ta n d
6
5
E rg e b n is
4
3
2
1
0
20
40
60
80
100
120
140 160 180
M u ta tio n e n
200
Künstliche Evolution: Angewinkelte Gelenkplatte im Windkanal
18. November 1964
Google: Der Spiegel Zickzack nach Darwin
Evolution eines
90°-Rohrkrümmers
Sechs verschiebliche Stangen bilden die
Variablen der flexiblen Rohrumlenkung
Start
Ergebnis
9% weniger
Umlenkverluste
Optimaler 90°- Strömungskrümmer
Zur Herstellung der Varianten
Heißwasserdampfdüse für das
Evolutionsexperiment mutierbar gemacht
h = 45%
0
1
16
31
2
17
32
3
18
33
4
19
34
5
20
35
6
21
36
7
22
37
8
23
38
9
24
39
10
25
40
11
26
41
12
27
42
13
28
43
14
29
44
15
30
Evolutionsexperiment
mit einer
Heißwasserdampfdüse
h = 79%
45
Evolution des Pferdefußes
Vom Eohippus zum Equus (60 Millionen Jahre)
Bionik
Evolution
Fundament
Fundamentalbeleg
der Bionik
Wie effektiv arbeitet die
biologische Evolution ?
Ist es nur die lange Zeit oder
ist es die Raffinesse der
Evolutionsstrategie ?
Herrmann von Helmholtz
„Einen Naturvorgang verstehen heißt,
ihn in Mathematik
Mechanik zu übersetzen“
(1 + 1)-ES
DARWINs Theorie in
maximaler Abstraktion
Algorithmus der zweigliedrigen Evolutionsstrategie
xNg x gE z g
g 1
xE
xNg für Q( xNg ) Q( xEg )
xEg sonst
x = Variablenvektor
z.B. 5 Gelenkwinkel
= Mutationsschrittweite
z = Normalverteilter Zufallsvektor
Q = Qualität (Tauglichkeit)
N = Index Nachkomme
E = Index Elter
g = Generationenzähler
z.B. Galtonsches Nagelbrett
Wie schnell ist bei
der Problemlösung …
Der Mathematiker
Die Biologische Evolution
Komplexität
?
Objekt
Eingangs-Ausgangs-Verhalten eines Objekts
in der Biologie und der Technik
Behauptung
Das Eingangs-Ausgangs-Verhalten eines
technischen oder biologischen Objekts ist im
Bereich kleiner Änderungen voraussehbar
Ausgang: Stärke
des Kaffeestroms
Eingang: Neigung
der Kaffeekanne
Starke Kausalität
Normalverhalten der Welt
Es gibt eine universelle Weltordnung
Kausalität
Gleiche Ursache, gleiche Wirkung
Schwache Kausalität
Kleine Ursachenänderung, große Wirkungsänderung
Starke Kausalität
Kleine Ursachenänderung, kleine Wirkungsänderung
!
Normales Verhalten der Welt
Starke Kausalität
y
y
x
nicht so
x
sondern so
Suchfeld
Experimentator
Schwache
Kausalität
Suche nach dem höchsten Gipfel
Suchfeld
Experimentator
Starke
Kausalität
Suche nach dem höchsten Gipfel
Dünenwanderung mit verbundenen Augen
Folgen des steilsten Anstiegs
Definition der
Fortschrittsgeschwindigkeit
im Fall der starken Kausalität
j
Bewegte Strecke bergauf
Zahl
Zahlder
derGenerationen
Versuche
nichtlinear
Lokales Klettern
linear
Lokales Klettern
Dünenwanderung mit verbundenen Augen
Folgen des steilsten Anstiegs
Strecke bergan
j Bewegte
Zahl der Versuche
Fortschritt
Z
y
Fortschritt
x
Linearitätsradius
Lokale deterministische Suche
Wandern entlang des steilsten Anstiegs
j
(2)
grad
( n)
grad
j
3
Versuchszahl
n 1
(1 + 1)-ES
DARWINs Theorie in
maximaler Abstraktion
2. Kind
Elter
1. Kind
Z
y
x
Linearitätsradius
Lokale stochastische Suche
Zufallsdriften entlang des steilsten Anstiegs
( 2)
j evo
?
(n)
j evo
?
Plus-Kind
Schwerpunkt der
Halbkreislinie
Minus-Kind
Elter
Linearitätsradius
Bestimmung des
linearen Fortschritts
+
−
Weil die Hälfte der Kinder
Misserfolge sind !
Statistisches Mittel
des Fortschritts
j s/ 2
Schwerpunkt
r
r
s
2 Dim.
s2
r
s
s
n Dim.
3 Dim.
1
s r
2
s
n
( 2 )
r
n
1
(
)
1
2
Die 1. Guldinsche Regel
Eine Kurve erzeugt durch Rotation um 360
Grad eine Rotationsfläche. Dann ist die
Oberfläche der Rotationsfläche gleich der
Länge der erzeugenden Kurve mal dem
Weg des Schwerpunktes dieser Kurve.
Paul Guldin (1577 – 1643)
Die 1. Guldinsche Regel
Eine Kurve erzeugt durch Rotation um 360
Grad eine Rotationsfläche. Dann ist die
Oberfläche der Rotationsfläche gleich der
Länge der erzeugenden Kurve mal dem
Weg des Schwerpunktes dieser Kurve.
Paul Guldin (1577 – 1643)
Beispiel:
Ein Halbkreis erzeugt durch Rotation um 360°
eine Kugel. Dann ist die Oberfläche der Kugel
gleich der Länge des Halbkreises ( r) mal dem
Rotationsweg des Schwerpunkts des Halbkreises.
s
Halbkreis mit dem Radius r
Halbkreisschwerpunkt
Schwerpunktsweg
Okugel = 2s
½ UKreis
OKugel
OKugel
s
UKreis
2 s 1 UKreis
2
Formel für die
Oberfläche einer
n-dimensionalen
Hyperkugel
Beispiel n = 2:
( n)
OKugel
n/2
2
r n1
(n/ 2)
(m) = (m – 1)! für ganzzahlige m
(x +1) = x (x), (1) = (2) = 1, (1/2) =
(2)
OKugel 2 r UKreis
gedeutet als
s
(2)
(3)
OKugel
( 2)
OKugel
( n 1)
Allgemein
(n)
s
OKugel
(n)
OKugel
(n
)
2
1
r
s
n
1
( 2 )
( n)
Was ist eine Hyperkugel ?
Eine n-dimensionale Kugel ?
Die Fortentwicklung einer konstruktiven mathematischen Idee
a
Beispiel:
Volumenelement
a
a
a
a
a
a
a
2
a
3
a
n
Genannt:
Stecke
Fläche
Volumen
Hypervolumen
P2
Analoge Extrapolationsidee für die
Entfernung zweier Punkte
P1
P1 { x1 }
P1 { x1 , y1 }
P1 { x1 , y1 , z1 }
P1 { x1 , y1 , z1 ,,1 }
P2 { x2 }
P2 { x2 , y2 }
P2 { x2 , y2 , z2 }
P2 { x2 , y2 , z2 ,,2 }
( x2 x1 )2
( x2 x1 )2 ( y2 y1 )2
( x2 x1 )2 ( y2 y1 )2 ( z2 z1 )2
( x2 x1)2 ( y2 y1)2 ( z2 z1)2 (21)2
( n)
s
n
(
1 2)
r
n
1
( 2 )
Wichtige asymptotische Formel:
n
2 2
Für n >> 1 gilt:
n 1
n
2
= mittlere Eltern-Pluskind-Pfeillänge
Richtung bergan im n-dimensionalen Raum
Fortschrittsgeschwindigkeit j
j ( n)
Weg bergauf
Versuchsza hl
Asymptotische
Näherung
n
(
2)
1
r
n
1
2 ( 2 )
( n)
s
2
j (n) r
2
1
n
2
1
n
für n >> 1
2. Kind
Elter
1. Kind
Z
y
x
Linearitätsradius
Lokale stochastische Suche
Zufälliges Folgen des steilsten Anstiegs
j
(2)
evo
(n
n))
jevo
evo
n
( )
1 2
n 1 n >> 1
(n
2 2
)
2
Ausgeklügeltes Handeln kontra Evolution
Für n >> 1
( n)
jgrad
n
(n)
jevo
1
2 n
1/n
1/ n
Gradientenstrategie
Evolutionsstrategie
Text
Bionik
Evolution
Fundamentalbeleg
Ende
www.bionik.tu-berlin.de
Ergebnis der linearen Theorie:
Eine ausgeklügelte Strategie (hier die einfachste Form einer Gradientenstrategie)
erzielt den größtmöglichen Fortschritt. Doch dazu muss die Umgebung durch
Messungen (bei der Gradientenstrategie n +1 Messungen) erkundet werden. Bei 2
Dimensionen sind das lediglich 3 Messungen. Bei 1000 Dimensionen müssen aber
1001 Erkundungsmessungen durchgeführt werden, um optimalen Fortschritt zu
erreichen. Anders bei der Evolutionsstrategie: Hier erbringt im linearen Funktionsbereich im Mittel schon jeder 2. Versuch einen Fortschritt. ½ mal dieser reduzierte
Zufallsfortschritt erbringt mehr als 1/(n+1) mal der größtmögliche Gradientenfortschritt.
Behauptung:
Ausgeklügelte Optimierungsstrategien, auch wenn sie raffiniert über den linearen
Funktionsbereich hinaus extrapolieren, werden mit wachsender Variablenzahl immer
irgendwann von der Evolutionsstrategie überholt. Daraus folgt: Die Evolutionsstrategie
ist für sehr, sehr viele Variablen die bestmögliche Optimierungsstrategie.