Kombinatorische Suche
Werbung

Westfälische Wilhelms-Universität Münster
Ausarbeitung
Kombinatorische Suche
im Rahmen des Seminars Parallele Programmierung
Christian Hermanns
Themensteller: Prof. Dr. Herbert Kuchen
Betreuer: Prof. Dr. Herbert Kuchen
Institut für Wirtschaftsinformatik
Praktische Informatik in der Wirtschaft
Inhaltsverzeichnis
1
Einleitung...............................................................................................................1
2
Branch-and-Bound .................................................................................................1
2.1
Traveling Salesman Problem..........................................................................3
2.2
Parallele Branch-and-Bound Algorithmen......................................................7
2.2.1
2.2.2
2.2.3
3
Multiprozessor Algorithmen.......................................................................7
Multicomputer Algorithmen.......................................................................8
Anomalien beim parallelen Branch-and-Bound ........................................10
Alpha-Beta Suche.................................................................................................14
3.1
3.1.1
3.2
3.2.1
3.2.2
3.2.3
Sequenzielle Alpha-Beta Suche....................................................................14
Erweiterungen der Alpha-Beta Suche.......................................................18
Parallele Alpha-Beta Suche..........................................................................18
Parallelisierung der Zugerzeugung und der Positionsbewertung ...............18
Parallele Aspirationssuche........................................................................19
Parallele Teilbaumsuche...........................................................................19
4
Zusammenfassung ................................................................................................21
5
Literaturverzeichnis ..............................................................................................22
II
Kapitel 1: Einleitung
1 Einleitung
Die kombinatorische Suche ist ein Verfahren zur Lösung von Problemen, deren
Lösungsparameter nur ganzzahlige Werte annehmen können. Die untersuchten
Probleme lassen sich unterteilen in Entscheidungsprobleme, deren Lösungen sämtliche
Nebenbedingungen des Problems erfüllen, und Optimierungsprobleme, deren Lösungen
zusätzlich eine gegebene Zielfunktion minimieren.
Die in dieser Arbeit behandelten kombinatorischen Optimierungsprobleme treten in
vielen Anwendungsgebieten, wie z.B. der künstlichen Intelligenz, dem Operations
Research oder der Datenbanktechnik, auf. Aufgrund der hohen Komplexität dieser
Probleme ist die Suche nach einer Lösung oft sehr aufwendig und zeitintensiv. Es stellt
sich die Frage, wie gut sich kombinatorische Suchalgorithmen parallelisieren lassen, um
deren Ausführung zu beschleunigen. Im Rahmen dieser Ausarbeitung sollen einige
kombinatorische Suchalgorithmen vorgestellt und deren Parallelisierungsmöglichkeiten
aufgezeigt werden.
Das zweite Kapitel beschäftigt sich mit dem Branch-and-Bound Verfahren. Nach einer
allgemeinen Beschreibung dieses Verfahrens wird ein Algorithmus zur Lösung des
Traveling Salesman Problems vorgestellt. Im Anschluss daran wird gezeigt, wie sich
das Branch-and-Bound Verfahren parallelisieren lässt. Im dritten Kapitel wird zunächst
der sequenzielle Alpha-Beta Algorithmus vorgestellt. Anschließend werden auch hier
Möglichkeiten der Parallelisierung erläutert. Die Ausarbeitung endet mit einer
Zusammenfassung im vierten Kapitel.
2 Branch-and-Bound
Das Branch-and-Bound Verfahren ist eine Variante des Backtrackings. Während beim
Backtracking
eine
erschöpfende
Suche
durchgeführt
wird,
um
alle
Lösungsmöglichkeiten auf Optimalität zu prüfen, kann das Suchfeld durch das Branchand-Bound Verfahren eingeschränkt werden. Teillösungen, die zu keiner optimalen
Lösung führen können, werden vernachlässigt.
Ein Branch-and-Bound Algorithmus versucht ein gegebenes Problem bei gleichzeitiger
Minimierung einer Ziel- oder Kostenfunktion
zu lösen. Falls ein Problem nicht
1
Kapitel 2: Branch-and-Bound
unmittelbar lösbar ist, wird das Problem in ein oder mehrere Teilprobleme zerlegt.
Diese werden durch Einschränkung des übergeordneten Problems gebildet. Die
Teilprobleme werden so lange zerlegt, bis sie eine zulässige Lösung darstellen oder
gesichert ist, dass sie zu keiner optimalen Lösung führen. Dieser Vorgang wird als
Branching bezeichnet.
Um zu erkennen, dass ein Teilproblem nicht zu einer optimalen Lösung führen kann,
wird zu jedem Teilproblem eine untere Schranke
berechnet. Diese gibt an, wie hoch
die Kosten für jede mögliche Lösung des Teilproblems mindestens sind. Ist bereits eine
Lösung gefunden worden, brauchen nur noch die Teilprobleme untersucht werden,
deren untere Schranken kleiner sind als die Kosten
der besten bereits gefundenen
Lösung. Da somit einige der Teilprobleme nicht weiter untersucht werden, wird diese
Technik auch als Bounding (Begrenzen) bezeichnet.
Der Zerlegungsprozess des Problems lässt sich durch einen Suchbaum darstellen. Die
Knoten des Baumes entsprechen den Teilproblemen und die Kanten beschreiben die
Zerlegungsschritte von der Wurzel zu den Blättern. Die Wurzel repräsentiert das
Gesamtproblem und die Blätter entsprechen gelösten oder nicht weiter untersuchten
Teilproblemen.
Während der Zerlegung enthält der Suchbaum meist mehrere noch nicht untersuchte
Teilprobleme. Das nächste zu untersuchende Teilproblem muss durch eine
Suchstrategie bestimmt werden. Diese legt die Reihenfolge fest, in der der Baum
durchlaufen wird. Mögliche Suchstrategien sind die Tiefensuche (depth-first), die
Breitensuche (breadth-first) und die Bestensuche (best-first).
Die vier wesentlichen Bestandteile eines Branch-and-Bound Algorithmus sind:
•
Eine Regel zur Generierung von Teilproblemen,
•
eine Auswahlregel für nicht untersuchte Teilprobleme,
•
eine Regel zur Eliminierung uninteressanter Teilprobleme und
•
eine Abbruchbedingung.
2
Kapitel 2: Branch-and-Bound
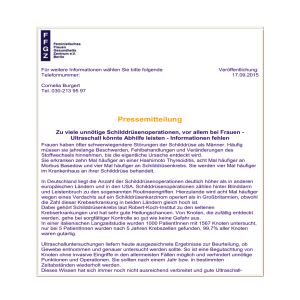
2.1 Traveling Salesman Problem
Das Traveling Salesman Problem (TSP) lässt sich folgendermaßen beschreiben: Eine
Menge von Städten soll durch eine möglichst kostengünstige, zyklische Tour
miteinander verbunden werden, wobei keine der Städte mehr als einmal besucht werden
darf. Zur Veranschaulichung kann das Problem durch einen zusammenhängenden,
gewichteten und ungerichteten Graphen (vgl. Abbildung 1) dargestellt werden. Die
gesuchte Tour ist der kürzeste, zyklische Pfad, der alle Knoten des Graphen genau
einmal enthält.
Abbildung 1: Ein gewichteter Graph mit TSP-Tour [Qu94, S.344]
Im Folgenden soll nun der Branch-and-Bound Algorithmus von Little (vgl. [Li63]) zur
Lösung des TSP vorgestellt werden (vgl. Abbildung 2).
Der Algorithmus arbeitet mit Hilfe einer Liste, die die bisher noch nicht untersuchten
Teilprobleme enthält. Zu Beginn wird das Ausgangsproblem, welches der Menge aller
möglichen Routen entspricht, in die Liste eingefügt. Da der Algorithmus eine best-first
Suche durchführt, entnimmt er jeweils das Teilproblem mit der niedrigsten unteren
Schranke aus der Liste und prüft, ob dieses direkt lösbar ist. Ein Teilproblem ist direkt
lösbar, wenn es nur eine mögliche Route zulässt. In diesem Fall ist die optimale Route
gefunden und der Algorithmus terminiert. Ist ein Problem nicht direkt lösbar, wird es
mit Hilfe einer Kante in zwei Teilprobleme unterteilt. Das eine Teilproblem entspricht
der Menge aller Routen, die die ausgewählte Kante enthalten, das andere Teilproblem
entspricht der Menge aller Routen, die die ausgewählte Kante nicht enthalten. Es wird
immer diejenige Kante gewählt, deren Ausschluss die untere Schranke am stärksten
anhebt. Mit dieser Heuristik wird versucht, die untere Schranke möglichst schnell zu
3
Kapitel 2: Branch-and-Bound
erhöhen. Der Suchbaum soll hierdurch so stark wie möglich beschränkt werden, um nur
wenige Knoten untersuchen zu müssen.
public static Tour tsp( WeightMatrix matrix ) {
// Erzeuge Knoten für das Ausgangaproblem
TspNode node = new TspNode( matrix );
// Finde untere Schranke durch Matrizenreduktion
node.findLowerBound();
// Knoten in leeren Suchbaum einfügen
TspTree tree = new TspTree( node );
while (true) {
// Wähle nicht untersuchten Knoten mit kleinster unterer
// Schranke
node = tree.removeSmallestLowerBoundNode();
// Ende, falls Tour gefunden
if ( node.representsTour() ) return node.getTour();
// Finde Kante, deren Ausschluß die untere Schranke am
// meißten erhöht.
Edge e = node.getMostIncreasingEdge();
for (int i=0; i<2; i++) {
// Kinder mit Einschränkungen werden erzeugt.
// Mit i=0 für Einschluss und i = 1 für Ausschluss der
// Kante e
Node child = node.createChild( i, e );
child.findLowerBound();
tree.addNode( child );
}
}
}
Abbildung 2: Java-Implementierung eins sequenziellen
Branch-and-Bound Algorithmus von
Little zur Lösung des Traveling Salesman Problems.
Die Berechnung der unteren Schranke für die Kosten einer Route wird mit Hilfe der
Matrixreduktion durchgeführt. Die Kosten für die Kanten lassen sich in einer
Kostenmatrix darstellen, in der jede Zeile und jede Spalte einem Knoten des Graphen
zugeordnet ist. Die Zeile der Matrix gibt den Startknoten, die Spalte den Zielknoten
einer Kante an. In einer Zeile der Kostenmatrix stehen die Kosten für alle Kanten, die
von einem bestimmten Knoten weg führen. Für jeden Knoten wird nun die wegführende
Kante mit den geringsten Kosten ermittelt, d.h. der kleinste Wert der Zeile wird
gewählt. Alle Einträge in der Zeile der Matrix werden um den Wert dieser Kante
reduziert und anschließend wird die untere Schranke um diesen Wert erhöht. Genauso
wird anschließend mit den Spalten der Matrix verfahren. Eine Spalte beinhaltet die
Kosten aller zu einem bestimmten Knoten hinführenden Kanten. Die entstehende
Matrix enthält nun nur noch die Zusatzkosten für die Kanten. Die Länge einer Route
4
Kapitel 2: Branch-and-Bound
berechnet sich also aus der Höhe der unteren Schranke und den zusätzlichen Kosten der
gewählten Kanten. Das Verfahren beruht auf der Tatsache, dass in der gesuchten Route
jeder Knoten genau eine hinführende und eine wegführende Kante besitzt. Für alle
Knoten wurde zur Ermittlung der unteren Schranke jeweils die kürzeste dieser beiden
Kantenarten gewählt. Ein Beispiel für die Matrizenreduktion wird in Abbildung 3
gezeigt.
Abbildung 3: Beispiele für die Matrizen Reduktion aus dem TSP Algorithmus von Little. (a) zeigt
die Berechnung der unteren Schranke für das Ausgangsproblem. In (b) und (c)
wird eine untere Schranke für die beiden ersten Teilprobleme berechnet (vgl.
Abbildung 4).
In Abbildung 3 ist der Suchbaum für die optimale Route des Graphen aus Abbildung 1
dargestellt. Jeder Knoten des Suchbaumes stellt eine Menge von Routen dar. Die
Wurzel repräsentiert die Menge aller möglichen Routen. Jeder Kindknoten stellt eine
Teilmenge der Menge des übergeordneten Knotens dar. Die Teilmengen werden durch
Einschränkung der erlaubten Routen gebildet. Der linke Kindknoten der Wurzel stellt
5
Kapitel 2: Branch-and-Bound
z.B. die Menge aller Routen dar, die die Kante (B,C) enthalten und der rechte
Kindknoten die Menge aller Routen, die die Kante (B,C) nicht enthalten. Die gebildeten
Teilmengen werden in jedem Verzweigungsschritt durch neue Einschränkungen weiter
unterteilt. Die Werte innerhalb der Knoten entsprechen jeweils den unteren Schranken,
die mittels der Matrixreduktion ermittelt wurden (vgl. Abbildung 3). Der Algorithmus
berechnet zunächst einen Wert von 25 für die untere Schranke der Wurzel, was
bedeutet, dass alle möglichen Routen eine Mindestlänge von 25 besitzen. Anschließend
wird die Kante gesucht, deren Ausschluss die untere Schranke am stärksten erhöht.
Hierfür wird derjenige Null-Wert der Ergebnismatrix gewählt, für den der nächst höhere
Wert in der zugehörigen Zeile oder Spalte möglichst groß ist. In diesem Fall ist das die
Kante (B,C) (vgl. Abbildung 3(a)). Die untere Schranke erhöht sich auf 29 für den
Ausschluss von (B,C). Für den Einschluss beträgt die untere Schranke nur 28, daher
wird die Suche im linken Teilbaum fortgesetzt. Dort werden die Kindknoten mit den
unteren Schranken 31 und 34 erstellt. Da nun der Knoten „Ohne (B,C)“ die kleinste
untere Schranke besitzt, wird an dieser Stelle weitergesucht. Nachdem die Kindknoten
des Knotens „Ohne (B,C)“ erstellt sind, existieren zwei Knoten mit identischen unteren
Schranken auf gleicher Ebene. In diesem Fall ist egal, ob der Knoten „Mit (E,D)“ oder
„Mit (E,C)“ untersucht wird. Die Suche wird nach dem beschriebenen Muster
fortgesetzt, bis eine zulässige Lösung gefunden ist.
Abbildung 4:
Der Suchbaum des TSP - Algorithmus aus Abbildung 2.
6
Kapitel 2: Branch-and-Bound
2.2 Parallele Branch-and-Bound Algorithmen
Dieses Kapitel beschreibt die Möglichkeiten einen Branch-and-Bound Algorithmus zu
parallelisieren. Während im Abschnitt 2.2.1 auf Parallelisierungen mit Hilfe einer
globalen Liste der noch nicht untersuchten Teilprobleme eingegangen wird, beschäftigt
sich der Abschnitt 2.2.2 mit Parallelisierungen durch Verwendung von verteilten Listen
für die nicht untersuchten Teilprobleme. In beiden Fällen dient das Traveling Salesman
Problem als Grundlage. Der letzte Abschnitt beschreibt Bedingungen, unter denen bei
parallelen
Branch-and-Bound
Algorithmen
Anomalien,
wie
z.B.
überlineare
Beschleunigung, auftreten können.
2.2.1 Multiprozessor Algorithmen
An dieser Stelle sollen zwei von Mohan (1983) entwickelte Parallelisierungen des TSP
Algorithmus von Little vorgestellt werden.
Der erste Algorithmus basiert auf
einer Parallelisierung der for-Schleife (vgl.
Abbildung 2), die die beiden Teilprobleme – eines für den Einschluss und eines für den
Ausschluss einer bestimmten Kante – erzeugt und für diese jeweils eine untere
Schranke berechnet. Ursprünglich hat die Schleife eine natürliche Parallelität von zwei,
da jeder Knoten des Suchbaumes genau zwei Kinder besitzt. Um eine größere Anzahl
von
Prozessoren
zu
ermöglichen,
lässt
sich
der
Verzweigungsfaktor
des
Zustandsbaumes durch die Betrachtung weiterer Kanten erhöhen. Werden bei der
Erstellung von Teilproblemen an jedem Knoten des Baumes jeweils k Kanten
berücksichtigt, so besitzt jeder Knoten des Baumes insgesamt 2k Kinder, da für jede
Kombinationsmöglichkeit die k Kanten einzuschließen oder auszuschließen ein
Teilproblem erzeugt wird. Entsprechend der Heuristik von Little werden hier die k
Kanten ausgewählt, deren Ausschluss die unteren Schranken am stärksten anheben.
Dieser Algorithmus eignet sich für die Ausführung auf 2k Prozessoren.
Der zweite Algorithmus arbeitet mit einer sortierten Liste, die die nicht untersuchten
Teilprobleme des Zustandsbaumes enthält. Diese Liste wird von mehreren von einander
unabhängigen Prozessen bearbeitet. Dabei entnimmt ein Prozess das Teilproblem mit
der niedrigsten unteren Schranke aus der Liste und berechnet, sofern das Problem noch
keine Lösung darstellt, anhand des bekannten Verfahrens zwei neue Teilprobleme mit
zugehörigen unteren Schranken. Die beiden neuen Teilprobleme werden entsprechend
7
Kapitel 2: Branch-and-Bound
ihren unteren Schranken in die Liste einsortiert. Zu beachten ist, dass der Zugriff auf die
Liste synchronisiert werden muss. Ein Prozess hat also immer exklusives Schreib- oder
Leserecht. Quinn weist aber darauf hin, dass die Listenoperationen im Vergleich zur
Erstellung von Teilproblemen nur relativ wenig Zeit in Anspruch nehmen. Demnach
sollten diese die Beschleunigung kaum negativ beeinflussen.
Vergleicht man die praktisch erreichte Beschleunigung der beiden Algorithmen, so fällt
auf, dass insbesondere der erste Algorithmus bei größeren Prozessorzahlen sehr
ineffektiv arbeitet. Die Beschleunigung ist bei mehr als 8 Prozessoren sogar rückläufig.
Nach Quinn liegt dies an der Tatsache, dass mit zunehmender Prozessorzahl vermehrt
Knoten erzeugt werden, die wegen ihrer hohen unteren Schranke für die optimale
Lösung nicht in Betracht kommen. Bei nur zwei Prozessoren ist die Beschleunigung
erwartungsgemäß nahezu linear, da hier der gleiche Zustandsbaum wie beim seriellen
Algorithmus durchlaufen wird. Der zweite Algorithmus erreicht in dem Testdurchlauf
mit 16 Prozessoren immerhin eine Beschleunigung von 8 bei einem 30-Knoten TSP.
Als Hindernis für eine höhere Beschleunigung nennt Quinn die nicht lokalen
Speicherzugriffe der Prozessoren.
2.2.2 Multicomputer Algorithmen
Es sollen nun vier Varianten eines asynchronen, parallelen Branch-and-Bound
Algorithmus von Quinn (vgl. [Qu90]) zur Lösung des Traveling Salesman Problems auf
einem Hypercube – Multicomputer vorgestellt werden. Der Algorithmus sieht für jeden
Prozessor eine eigene Prioritätswarteschlange für die noch nicht untersuchten
Teilprobleme vor. Die Prozessoren bearbeiten ihre Warteschlangen unabhängig von
einander. Der Unterschied zwischen den vier Varianten des Algorithmus besteht
ausschließlich in der Heuristik für den Austausch von nicht untersuchten
Teilproblemen. Der Ablauf des Algorithmus lässt sich wie folgt beschreiben: Jeder
Prozessor, dessen Warteschlange nicht leer ist, entfernt das Teilproblem mit der
niedrigsten unteren Schranke aus seiner Warteschlange. Sollte sich das Teilproblem
nicht direkt lösen lassen, wird es mittels der bereits beschriebenen Methode von Little
in zwei Teilprobleme unterteilt. Nachdem diese wieder in die Warteschlange eingefügt
wurden, wird entsprechend einer Heuristik eines der Teilprobleme aus der
Warteschlange entfernt und an einen benachbarten Prozessor geschickt. Alle
Algorithmen verwenden bei der Wahl des Zielprozessors folgende Regel: Sei p=2d die
Anzahl der Prozessoren, dann sendet ein Prozessor i bei der Iteration j ein nicht
8
Kapitel 2: Branch-and-Bound
untersuchtes Teilproblem an Prozessor r. Die Nummer r wird durch Invertierung des
Bits an der Stelle (j mod d) der Zahl i ermittelt.
Zu Beginn der Ausführung enthält die Warteschlange von Prozessor 0 das
Ausgangsproblem. Jeder Prozessor, dessen Warteschlange nicht leer ist, kann bei jeder
Iteration einen weiteren Prozessor mit einem Teilproblem versorgen. Die Anzahl der
aktiven Prozessoren kann also mit jeder Iteration verdoppelt werden. Nach log2(p)
Iterationen sind somit alle p Prozessoren aktiviert (vgl. Abbildung 5).
Abbildung 5: 3-dimensionaler Hypercube (aus 8 Prozessoren). Die Pfeile mit den Ziffern
verdeutlichen die Aktivierungsreihenfolge zu Beginn der Ausführung (wie sie in den
hier vorgestellten Algorithmen implementiert ist).
Entsprechend dem seriellen TSP Algorithmus ist die Suche beendet, sobald die beiden
Abbruchbedingungen eines Branch-and-Bound Algorithmus erfüllt sind. Es muss
mindestens eine Lösung gefunden sein und es darf keine nicht untersuchten Knoten mit
einer unteren Schranke geben, die niedriger ist, als die beste der bisher gefundenen
Lösungen.
Wie bereits erwähnt, hat Quinn vier Varianten dieses Algorithmus hinsichtlich der
erzielten Beschleunigung getestet. Die Unterschiede der Algorithmen beruhen auf der
Verteilungsheuristik für nicht untersuchte Teilprobleme und können der Tabelle 1
entnommen werden.
Algorithmus 1
Füge neues Teilproblem, bei dem die Kante eingeschlossen
wird, in die Warteschlange ein und sende Teilproblem bei dem
die Kante ausgeschlossen wird.
Algorithmus 2
Füge neues Teilproblem mit kleinerer unterer Schranke in die
Warteschlange ein und sende das Teilproblem mit der größeren
9
Kapitel 2: Branch-and-Bound
unteren Schranke.
Algorithmus 3
Füge die beiden neuen Teilprobleme in die Warteschlange ein.
Sende und entferne das zweitbeste Problem der Warteschlange.
Algorithmus 4
Füge beide neuen Teilprobleme in die Warteschlange ein. Sende
und entferne das beste Problem der Warteschlange.
Tabelle 1:
Austauschheuristiken der vier Varianten des parallelen Algorithmus von Quinn für
das TSP.
Ein theoretischer und praktischer Vergleich der vier Varianten in [QU94] für ein 30Knoten Taveling Salesman Problem führt zu dem Ergebnis, dass die Algorithmen 3 und
4 den beiden anderen deutlich überlegen sind. Die Performanceunterschiede weisen laut
Quinn darauf hin, dass es bei dieser Art von parallelen Algorithmen wichtig ist, eine
gute Heuristik für das Austauschen von nicht untersuchten Teilproblemen zu
verwenden. Das Ziel eines guten parallelen Algorithmus, der verteilte Warteschlangen
benutzt, sollte es folglich sein, möglichst viele Prozessoren mit sinnvoller Arbeit zu
versorgen. In diesem konkreten Fall bedeutet dies, dass die Prozessoren einen möglichst
großen Anteil ihrer Arbeit mit der Untersuchung von „lohnenswerten“ Knoten
verbringen sollen. Der durchlaufene Zustandsbaum soll dem des seriellen Algorithmus
möglichst ähnlich sein.
2.2.3 Anomalien beim parallelen Branch-and-Bound
Unter bestimmten Voraussetzungen lassen sich bei parallelen Branch-and-Bound
Algorithmen Aussagen über die theoretisch erreichbare Beschleunigung machen. Die
folgenden Sätze beruhen auf der Analyse von Lai und Sahni. Zunächst werden aber
noch einige vereinfachende Annahmen gemacht, um die folgende Analyse zu
erleichtern:
1. Für alle Knoten des Zustandsbaumes sei die benötigte Zeit, um diese in
Teilprobleme aufzuteilen, konstant.
2. Bei jeder Iteration bearbeitet jeder Prozessor ein anderes Teilproblem (sofern
genügend Teilprobleme vorhanden sind).
3. I(p) sei die Anzahl der Iterationen, die p Prozessoren benötigen, um ein
gegebenes Branch-and-Bound Problem zu lösen.
10
Kapitel 2: Branch-and-Bound
Außerdem soll g(x) dem Wert der unteren Schranke eines Knotens x entsprechen und f*
dem Wert der optimalen Lösung.
Satz 1 besagt, dass eine Erhöhung der Prozessorenzahl zu einer Verlängerung der
Ausführungszeit führen kann.
Satz 1: Sei n1 < n2 und k > 0, dann gibt es einen Zustandsbaum, für den gilt
k * I(n1) < I(n2). (vgl. [LS84])
Beweis:
Die Richtigkeit des Satzes lässt sich leicht durch Konstruktion eines
geeigneten Zustandsbaumes zeigen. Abbildung 6 stellt einen solchen Baum dar. Alle
„=“ - Knoten haben die gleiche untere Schranke, wie der Knoten mit der optimalen
Lösung (Knoten A). Entsprechend besitzen alle „>“ - Knoten eine größere untere
Schranke, als der Knoten mit der optimalen Lösung (g(x)>f*).
Führen nun n1 Prozessoren die Suche durch, so wird in der ersten Iteration das
Ausgangsproblem, also die Wurzel des Zustandsbaumes, erweitert. Das Resultat sind
n1+1 entstehende Teilprobleme. Angenommen der Algorithmus verfolgt die n1 am
weitesten links stehenden Teilprobleme, so werden diese zu n1 neuen Knoten erweitert.
Bei der 3. Iteration werden nun in jedem Fall der „=“ – Knoten auf Ebene 3 und der
Knoten B erweitert, da diese die kleinsten unteren Schranken aufweisen. Nach der 3.
Iteration ist eine optimale Lösung, der Knoten A, bereits erreicht. Weitere Knoten
brauchen nicht untersucht zu werden, da alle unteren Schranken der nicht untersuchten
Knoten größer oder gleich der Lösung im Knoten A sind. Es gilt I(n1) = 3.
Abbildung 6: Zustandsbaum, der zeigt, dass eine Erhöhung der Prozessorenzahl zu einer
Verlängerung der Ausführungsdauer führen kann.
11
Kapitel 2: Branch-and-Bound
Bei n2 Prozessoren verläuft die Suche folgendermaßen: Bei der ersten Iteration wird die
Wurzel des Zustandsbaumes auf n1+1 neue Knoten erweitert. Im nächsten Schritt
werden alle n1+1 Knoten erweitert, da n2
n1 + 1 ist. Aus den n1+n2 entstandenen
Knoten wählt dieser Algorithmus nun die n2 am weitesten rechts stehenden aus. Diese
werden nun bis zur Iteration 3k ständig erweitert. Bei der Iteration 3k+1 wird in jedem
Fall der verbleibende „=“ – Knoten der 3. Ebene zum Knoten A erweitert, da dieser die
niedrigste untere Schranke aufweist. Die Suche ist hier also erst nach 3k+1 Iterationen
beendet. Es gilt I(n2) = 3k+1. Aus beiden Ergebnissen folgt: kI(n1) = 3k < 3k + 1 = I(n2)
Die Anomalie, die in Satz 1 beschrieben wird, beruht auf der relativ großen Anzahl an
Knoten, für die gilt g(x)=f*. Wenn jedoch für alle inneren Knoten g(x) f* gilt, so führt
eine größere Anzahl Prozessoren in jedem Fall zu einer größeren Beschleunigung (vgl.
Satz 2).
Definition: Jeder Knoten x mit g(x)< f* wird als kritischer Knoten bezeichnet
(vgl. [Qu94]).
Satz 2: Wenn für alle Knoten, die keine Lösungsknoten sind, gilt g(x)
daraus I(1)
f*, dann folgt
I(n) für alle n > 1. (vgl. [LS84])
Beweis: Bei nur einem Prozessor werden wegen der best-first Suchstrategie des Branchand-Bound Algorithmus bis zum Erreichen einer optimalen Lösung ausschließlich
kritische Knoten untersucht. Angenommen es existieren genau m solcher Knoten, dann
terminiert
die
Suche
mit
einem
Prozessor
nach
m
Iterationen.
Es gilt I(1) = m.
Aufgrund der Tatsache, dass in einem Suchbaum die unteren Schranken der Knoten von
der Wurzel zu den Blättern nicht kleiner werden dürfen, gilt das folgende Lemma.
Lemma: In einem Suchbaum ist jeder Knoten, der einem kritischen Knoten
übergeordnet ist, ebenfalls ein kritischer Knoten.
Für den Fall, dass nun n (n>1) Prozessoren eine best-first Suche durchführen, wird,
wegen der Gültigkeit des Lemmas, bei jeder Iteration mindestens einer dieser kritischer
Knoten erweitert. Nach höchstens m Iterationen enthält der Zustandsbaum also keine
ununtersuchten kritischen Knoten mehr. Spätestens jetzt ist eine optimale Lösung
gefunden. Bei m kritischen Knoten gilt: I(n)
m. Es folgt also: I(1)
I(n).
Der dritte Satz zeigt, dass es unter bestimmten Umständen zu einer überlinearen
Beschleunigung ( I(n1)/I(n2) > n2/n1 ) kommen kann.
12
Kapitel 2: Branch-and-Bound
Satz 3: Sei n1 < n2 und k > n2/n1, dann existiert ein Zustandsbaum, für den gilt
I(n1)/I(n2)
k. (vgl. [LS84])
Beweis: Der Zustandsbaumes aus Abbildung 7 zeigt die Korrektheit des Satzes. Wird
das zugehörige Problem von n1 Prozessoren bearbeitet, so wird bei der ersten Iteration
das Ausgangsproblem erweitert. Auf der Ebene 1 des Baumes entstehen n2 neue
Knoten. Der Algorithmus wählt nun die n1 am weitesten links stehenden Knoten aus
und erweitert diese bis zur Ebene k. Die restlichen Knoten der Ebene 1 werden also erst
nach k Iterationen untersucht. Es gilt I(n1)
k.
Wird die Suche von n2 Prozessoren durchgeführt, so ergeben sich nach einer Iteration
ebenfalls n2 neue Knoten auf Ebene 1. Der Algorithmus terminiert hier also schon nach
einer Iteration, da der Knoten A mit einer optimalen Lösung erreicht ist. Alle nicht
untersuchten unteren Schranken sind größer oder gleich der gefundenen Lösung. Es gilt
I(n2) = 1. Aus beiden Ergebnissen folgt, I(n1)/I(n2)
k (bzw. I(n1)/I(n2) > n2/n1 ).
Abbildung 7: Zustandsbaum, der zeigt, wie es zu einer überlinearen Beschleunigung kommt.
Es gilt k > n1/n2.
Im Allgemeinen kann jedoch nicht mit einer überlinearen Beschleunigung gerechnet
werden, wie der folgende Satz zeigt.
Satz 4: Wenn für alle Knoten, die keine optimalen Lösungsknoten sind, gilt:
g(x)
f* ist dann ist I(1)/I(n)
n für alle n > 1. (vgl. [LS84])
Beweis: Sei m die Anzahl der kritischen Knoten, dann gilt I(1) = m (vgl. Satz 2). Bei
mehreren Prozessoren kann die Suche frühestens nach Untersuchung aller kritischen
13
Kapitel 3: Alpha-Beta Suche
Knoten terminieren. n (n>1) Prozessoren benötigen hierfür mindestens m/n Iterationen.
Also gilt, I(n) m/n. Es folgt, dass I(1)/I(n)
n.
3 Alpha-Beta Suche
3.1 Sequenzielle Alpha-Beta Suche
Die Alpha-Beta Suche ist eine Erweiterung des Minimax Verfahrens und eine Methode
zur Bewertung von Spielzügen in so genannten Zwei-Personen-Null-Summen
Computerspielen, wie z.B. Schach, Dame oder „Tic Tac Toe“.
Die möglichen Spielverläufe eines solchen Spieles lassen sich durch einen Spielbaum
darstellen (vgl. Abbildung 8). Die gestrichelten Kanten stellen die Zugvarianten des
ersten Spielers dar, die durchgezogenen die des zweiten Spielers. Mögliche Zustände
des Spieles werden durch die Knoten repräsentiert, wobei die Wurzel des Baumes den
Startzustand und die Blätter die Endzustände darstellen. In den Blättern ist der Endwert
des Spieles vermerkt, dieser entspricht dem Gewinn des ersten Spielers (bzw. der
Verlust des zweiten Spielers). Der erste Spieler wird versuchen, den Endwert zu
maximieren, während der zweite Spieler bemüht ist, diesen zu minimieren. Ausgehend
von den Blättern des Spielbaumes ist es mit Hilfe des Minimax Algorithmus möglich,
die restlichen Knoten mit Werten zu versehen. Alle Knoten, bei denen Spieler Eins an
der Reihe ist, werden mit dem maximalen Wert ihrer Kindknoten versehen, da Spieler
Eins immer den Zug wählen wird, der den Spielwert maximiert. Dem entsprechend
erhalten die Knoten, bei denen Spieler Zwei an der Reihe ist, den minimalen Wert ihrer
Kindknoten. Die Knoten von Spieler Eins werden daher auch als Maximum-Knoten, die
Knoten von Spieler Zwei als Minimum-Knoten bezeichnet. Der Wert eines MaximumKnotens gibt den Gewinn an, den Spieler Eins mindestens erhält, sofern er nach der
Maximum-Strategie spielt. Der Wert eines Minimum-Knotens steht für den höchstens
erreichbaren Gewinn von Spieler Eins.
Da die Spielbäume vieler Null-Summen Spiele oft zu komplex sind, um sie komplett zu
durchsuchen, muss die maximale Suchtiefe in diesen Fällen (die Höhe des Baumes)
beschränkt werden. Die Werte der Blätter werden in diesem Fall durch eine
Schätzfunktion für den Wert des Spieles ermittelt. Da eine Schätzfunktion den Wert des
14
Kapitel 3: Alpha-Beta Suche
Spieles nur sehr ungenau bestimmen kann, ist für eine gute Prognose des Spielwertes an
der Wurzel ein Suchbaum mit möglichst hoher Tiefe wünschenswert.
Abbildung 8: oben: Spielbaum eines Null-Summen Spiels. Die Knoten repräsentieren die
Spielstellungen, die Kanten die Spielzüge. Die Blätter enthalten
Der Alpha-Beta Algorithmus versucht die Suchtiefe zu erhöhen, in dem er durch
Anwendung einer Branch-and-Bound Technik diejenigen Teilbäume, die das Ergebnis
der Suche nicht beeinflussen, aus der Suche ausschließt. Eine mögliche JavaImplementierung des Alpha-Beta Algorithmus zeigt Abbildung 9. Der Algorithmus
wird mit vier Parametern aufgerufen: Dem Knoten des zu durchsuchenden Teilbaumes,
der Tiefe des Suchvorganges und den Parametern alpha und beta, die eine untere bzw.
obere Grenze für den gesuchten Spielwert darstellen.
public static int alphaBeta (MinMaxNode node, int depth,
int alpha, int beta) {
if (node.isLeaf() || depth <= 0)
return node.evaluate();
Iterator moves = node.getMoves();
if ( node.isMinNode() ) {
while ( moves.hasNext() ) {
int val = alphaBeta ( (MinMaxNode)moves.next(), depth-1,
alpha, beta);
if ( val < beta )
beta = val;
if alpha >= beta
return beta;
}
return beta;
}
else {
15
Kapitel 3: Alpha-Beta Suche
while ( moves.hasNext() ) {
int val = alphaBeta ( (MinmaxNode)moves.next(), depth-1,
alpha, beta);
if ( val > alpha )
alpha = val;
if alpha >= beta
return alpha;
}
return alpha;
}
}
Abbildung 9: Java-Implementierung des sequenziellen Alpha-Beta Algorithmus
Die Abbildung 10 verdeutlicht den Ablauf des Alpha-Beta Algorithmus anhand eines
Spielbaumes. Der „preorder“ Durchlauf startet an der Wurzel mit den Parametern
= -
und
=
. Im Verlauf der Suche gibt
den minimal und
den maximal
erreichbaren Endwert des Spieles im Bezug auf alle bisher durchsuchten Knoten an. Ein
innerer Knoten wird mit den ermittelten
und
Werten des übergeordneten Knotens
durchsucht. Handelt es sich bei diesem Knoten um einen Maximum-Knoten, so wird in
dessen Nachfolgern nach einem größeren Wert für
gesucht. Im Falle eines Minimum-
Knotens wird in den Nachfolgern nach einem geringeren Wert für
gesucht. Das
Ergebnis der Suche wird an den übergeordneten Knoten zurückgegeben. Im Falle eines
Maximum-Knotens ist dies der
Wert und im Falle eines Minimum-Knotens der
Wert. Wird ein Blatt untersucht, so wird der Wert des Blattes zurückgegeben.
Abbildung 10: Suchbaum einer Alpha-Beta Suche. Die Werte der Blätter werden durch eine
Schätzfunktion bestimmt.
Alle inneren Knoten werden durch ihre Nachfolger
berechnet. An den markierten Knoten wird der Suchbaum beschnitten.
Zu einer Beschneidung des Suchbaumes kommt es, sobald in einem Knoten der
größer oder gleich dem
Wert
Wert ist. In diesem Fall ist für den Spieler, dessen Zug zu
diesem Knoten führen würde, bereits eine gleich gute oder bessere Zugfolge gefunden
worden. Eine solche Beschneidung tritt zum Beispiel im Knoten A von Abbildung 10
auf. Da der Vorgänger von A, ein Minimum-Knoten, in seinem linken Teilbaum bereits
16
Kapitel 3: Alpha-Beta Suche
einen Spielwert von 2 ermittelt hat, wird Knoten A mit den Werten
=-
und
=2
untersucht. Dieser untersucht zunächst seinen ersten Nachfolger, ebenfalls mit den
Werten
= - und
= 2. Da dieser Knoten ein Minimum-Knoten ist und sich in dessen
Nachfolgern (den Blättern) keine kleineren Werte als
(= 2) befinden, wird der Wert
(= 2) zurückgegeben. Im Maximum-Knoten A wird darauf hin
=
= 2 gesetzt. Da nun
gilt, braucht dieser Teil des Suchbaumes nicht weiter untersucht zu werden, denn
für den Spieler des übergeordneten Knoten ist bereits eine mindestens gleichwertige
Zugfolge ermittelt worden.
Der Aufwand der Alpha-Beta Suche entspricht größenordnungsmäßig der Anzahl der
untersuchten Blätter des Spielbaums. Der Worst-Case tritt auf, falls von jedem Knoten
aus der beste Zug zuletzt untersucht wird. In diesem Fall müssen alle Blätter des
Spielbaums durchsucht werden. Wenn b der Verzweigungsfaktor des Baumes und d die
Suchtiefe ist, dann beträgt der Aufwand der Alpha-Beta Suche O( bd ). Im Best-Case
wird von jedem Knoten aus der beste Zug zuerst untersucht (vgl. Abbildung 11). Slagle
und Dixon [SD69] haben gezeigt, dass der Alpha-Beta Algorithmus im Best-Case nur
b
d /2
+b
d /2
+ 1 Blätter untersucht. Es ergibt sich also ein Aufwand von O( 2bd/2 ).
Abbildung 11: Suchbaum der Alpha-Beta Suche im Best-Case. Es gibt drei Typen von Knoten. Die
Wurzel des Baumes ist ein Typ 1 Knoten. Der erste Nachfolger eines Typ 1 Knotens
ist wieder ein Typ 1 Knoten. Alle weiteren sind vom Typ 2. Der erste Nachfolger
eines Typ 2 Knotens ist ein Typ 3 Knoten. Alle weiteren Nachfolger werden nicht
untersucht. Alle Nachfolger eines Typ 3 Knotens sind vom Typ 2.
Der effektive Verzweigungsfaktor eines Algorithmus, der einen Spielbaum durchsucht
berechnet sich nach der Definition von Quinn [Qu94] durch folgende Formel:
d
Anzahl der untersuchten Blätter , wobei d die Suchtiefe des Algorithmus bezeichnet.
Der Verzweigungsfaktor der Alpha-Beta Suche im Best-Case ist also gleich
d
2b d/2 = d 2 * b . Bei größeren Suchtiefen entspricht dies näherungsweise einem
17
Kapitel 3: Alpha-Beta Suche
Verzweigungsfaktor von
b . Bei gleichem Aufwand kann die Suchtiefe also
verdoppelt werden.
Quinn [Qu94] weist darauf hin, dass optimal geordnete Spielbäume in der Praxis nicht
auftauchen und daher in der Regel mit einem 50 Prozent Mehraufwand im Vergleich
zum Best-Case gerechnet werden muss.
3.1.1 Erweiterungen der Alpha-Beta Suche
An dieser Stelle sollen zwei Erweiterungsmöglichkeiten der Alpha-Beta Suche, die
Aspirationssuche und die iterative Vertiefung, vorgestellt werden.
Die Aspirationssuche versucht die Alpha-Beta Suche durch Verkleinerung des
Suchfensters, das durch
und
beschrieben wird, zu beschleunigen. Statt der Werte
(- , ) für die Parameter ( , ) wird das Suchfenster auf ( - , + ) beschränkt. Wobei
ein Schätzer für das erwartete Ergebnis der Suche ist und
die Höhe des zulässigen
Fehlers angibt. Liegt das tatsächliche Ergebnis innerhalb des verkleinerten Suchfensters,
so verkürzt sich die Suchzeit. Entspricht das Ergebnis der Suche jedoch der oberen oder
unteren Schranke des Suchfensters, so befindet sich das tatsächliche Ergebnis oberbzw. unterhalb des Suchfensters. Es muss eine erneute Suche mit den Parametern ( + ,
) bzw. (- , - ) durchgeführt werden.
Bei der iterativen Vertiefung wird die Alpha-Beta Suche mehrmals hintereinander mit
steigender Suchtiefe durchgeführt. Obwohl bei dieser Vorgehensweise Teile des
Spielbaumes mehrfach durchsucht werden, stellt dieses Verfahren eine Verbesserung
dar. Die Informationen vorheriger Iterationen dienen dazu, die folgenden Iterationen zu
beschleunigen, indem z.B. der Suchbaum optimiert oder das Suchfenster verkleinert
wird. Zudem ist es bei der iterativen Vertiefung möglich, die Laufzeit der Suche zu
kontrollieren. Sollte die Suche während einer Iteration unterbrochen werden, ist sie
nicht ergebnislos, da die vorherigen Iterationen bereits Ergebnisse geliefert haben.
3.2 Parallele Alpha-Beta Suche
3.2.1 Parallelisierung der Zugerzeugung und der Positionsbewertung
Die Zugerzeugung und die Bewertung von Spielpositionen lassen sich bei der AlphaBeta Suche leicht parallelisieren. Beide beziehen sich nur auf einen Teil des
18
Kapitel 3: Alpha-Beta Suche
Algorithmus (vgl. Abbildung 9). Der Suchprozess bleibt weiterhin sequenziell. Zudem
ist die erreichbare Beschleunigung, z.B. durch die Anzahl der Zugmöglichkeiten,
begrenzt.
3.2.2 Parallele Aspirationssuche
Auch die weiter oben vorgestellte Aspirationssuche lässt sich einfach parallelisieren.
Mit 3 Prozessoren ist es möglich, für jedes der Suchfenster (- , - ), ( - , + ) und ( ,
) gleichzeitig eine Suche durchzuführen. Liegt das tatsächliche Ergebnis nicht im
vermuteten Suchfenster ( - , + ), so garantiert die parallele Suche für die beiden
anderen Suchfenster, dass die Suche mindestens genauso schnell beendet ist, wie die
Suche mit einem Prozessor im Bereich (- , ). Durch Änderung der Größe und Anzahl
der Suchfenster kann die Anzahl der Prozessoren weiter erhöht werden. Zu beachten
ist, dass
( 2bd/2 ) auch eine untere Schranke für den Aufwand der Suche mit
minimalem Suchfenster ist. Nach Quinn [Qu94] kann daher unabhängig von der Anzahl
an Prozessoren nur eine maximale Beschleunigung von 5 oder 6 erreicht werden.
3.2.3 Parallele Teilbaumsuche
Eine weitere Methode, die Alpha-Beta Suche zu parallelisieren, besteht darin, den
Spielbaum in eine Menge von unanhängigen Teilbäumen zu zerlegen und diese mit
einer Menge von Prozessoren parallel zu untersuchen.
Auf Grund der Tatsache, dass mehrere Teilbäume gleichzeitig durchsucht werden,
entsteht im Vergleich zur sequenziellen Suche ein zusätzlicher Aufwand. Dieser besteht
aus
zusätzlichem
Kommunikationsaufwand
und
zusätzlichem
Suchaufwand.
Angenommen ein Spielbaum ließe sich an seiner Wurzel in mehrere Teilbäume
zerlegen. Ein sequenzieller Alpha-Beta Algorithmus würde die einzelnen Teilbäume
nacheinander durchsuchen. Die Suche würde in diesem Fall im ersten Teilbaum mit
dem Suchfenster (- ,
) beginnen und alle nachfolgenden Teilbäume mit einem
eingeschränkten Fenster durchsuchen. Werden nun aber alle Teilbäume gleichzeitig mit
einem Suchfenster von (- ,
) durchsucht, so müssen in einigen Teilbäumen mehr
Knoten untersucht werden, als im sequenziellen Fall. Dieser zusätzliche Suchaufwand
lässt sich nur durch zusätzlichen Kommunikationsaufwand reduzieren, indem die
Prozessoren ihre neu ermittelten Suchfenster untereinander austauschen.
19
Kapitel 3: Alpha-Beta Suche
Im Folgenden sollen die beiden Extremfälle, ein Algorithmus mit minimalem
zusätzlichem
Kommunikationsaufwand
und
ein
Algorithmus
mit
minimalem
zusätzlichem Suchaufwand, untersucht werden.
Eine einfache Möglichkeit, den Kommunikationsaufwand zu minimieren, besteht darin,
den Spielbaum an seiner Wurzel in mehrere Teilbäume zu unterteilen und jedem
Teilbaum einen Prozessor zuzuordnen. Die Prozessoren durchsuchen die Teilbäume
unabhängig voneinander, ohne ihre neu ermittelten Schranken auszutauschen.
Wie bereits oben erwähnt kommt es bei diesem Vorgehen zu einem erheblichen
zusätzlichen Suchaufwand. Unterstellt man einen optimal geordneten Spielbaum und
nimmt weiterhin an, dass der erste Teilbaum des Spielbaumes von nur einem Prozessor
durchsucht wird, so ist die maximal erreichbare Beschleunigung äußerst gering (vgl.
[Qu94]). Dies liegt daran, dass der erste Teilbaum eines optimalen Spielbaumes der
Höhe d ebenfalls ein optimaler Spielbaum mit Höhe d-1 ist (vgl. Abbildung 11). Ein
überproportional großer Anteil des Suchaufwandes entfällt damit auf den ersten
Teilbaum. Quinn nennt hier als Beispiel einen optimal geordneten Spielbaum der Höhe
8 mit einem Verzweigungsfaktor von 38. Hier entfallen ca. 51,3% des Suchaufwandes
auf den ersten Teilbaum, die erreichbare Beschleunigung wäre niedriger als 2.
Um den zusätzliche Suchaufwand zu minimieren muss sichergestellt werden, dass der
parallele Algorithmus die gleichen Knoten untersucht, wie der sequenzielle Alpha-Beta
Algorithmus. Unter der Annahme, dass ein optimal geordneter Spielbaum untersucht
wird, muss ein paralleler Algorithmus daher die folgenden Regeln einhalten.
Wird der Teilbaum eines Knotens vom Typ 1 (vgl. Abbildung 11) untersucht, so muss
zunächst der Kindknoten vom Typ 1 untersucht werden, bevor mit der Suche in den
Kindknoten vom Typ 2 begonnen werden kann. Hierdurch wird garantiert, dass die
Suche in den Kindknoten vom Typ2 mit minimalem Suchfenster begonnen wird. Nur so
ist sichergestellt, dass möglichst wenig Knoten untersucht werden müssen. Alle Knoten
vom Typ 2 können anschließend parallel zueinander durchsucht werden.
Ein Teilbaum eines Knotens vom Typ 2 wird nur in seinem ersten Kindknoten
durchsucht, daher kann hier keine parallele Suche angewandt werden.
Ein Teilbaum eines Knotens vom Typ 3 enthält nur Knoten vom Typ 2 und kann daher
ohne Einschränkungen parallel durchsucht werden.
20
Kapitel 4: Zusammenfassung
Bei der hier angewandten Strategie wird mit der Durchsuchung von Teilen des
Spielbaumes gewartet, bis kleinere Suchfenster gefunden sind. Dies führt auch bei nicht
optimalen
Spielbäumen
zu
einer
erheblichen
Reduzierung
des
zusätzlichen
Suchaufwands.
4 Zusammenfassung
Im Rahmen dieser Ausarbeitung wurden zwei Arten von Algorithmen für die
kombinatorische Suche vorgestellt, das Branch-and-Bound Verfahren und die Alpha
Beta Suche.
Für das Branch-and-Bound Verfahren, welches anhand des Traveling Salesman
Problems erläutert wurde, sind drei parallele Algorithmen vorgestellt worden. Zwei
Algorithmen von Mohan für ein Multiprozessorsystem und ein Algorithmus von Quinn
für einen Hypercube Multicomputer. Die Arbeit hat gezeigt, dass die erreichbare
Beschleunigung für parallele Branch-and-Bound Algorithmen umso größer ist, je besser
es gelingt, die einzelnen Prozessoren mit sinnvoller Arbeit zu beschäftigen.
Für die Alpha-Beta Suche wurden drei Möglichkeiten der Parallelisierung aufgezeigt,
die parallele Zugerzeugung und Bewertung, die parallele Aspirationssuche und die
parallele Teilbaumsuche. Es wurde gezeigt, dass beim Einsatz von einer größeren
Anzahl an Prozessoren nur die parallele Teilbaumsuche eine akzeptable Beschleunigung
erzielt.
21
Literaturverzeichnis
5 Literaturverzeichnis
[Qu94]
Michael J. Quinn: Parallel Computing Theory and Practise, 2. Aufl.,
McGrawn-Hill, 1994.
[Qu90]
Michael J. Quinn: Analysis and implementation of branch-and-bound
algorithms on a hypercube multicomputer. IEEE Transactions on
Computers, vol. C-39, no. 3, S. 384-387, 1990
[LS84]
T. H. Lai und S. Sahni: Anomalies in parallel branch-and-bound algorithms,
Communications of the ACM, vol. 27, no.6, S. 594-602, 1984
[Li63]
J. D. C. Little, K. G. Murty, D. W. Sweeney, C. Karel: An algorithm for the
traveling salesman problem. Operations Research, vol. 11, no. 6, S. 972989, 1963
[SD69]
J. R. Slagle, J. K. Dixon: Experiments with some programs that search game
trees. Journal of the ACM, vol. 16, no.3, S.189-207, 1969.
22