Scheinkräfte
Werbung

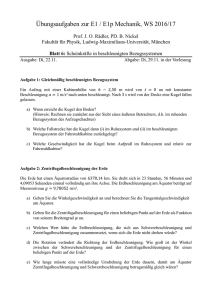
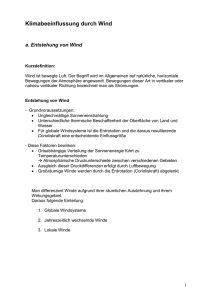
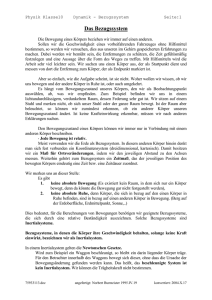
Kräfte in rotierenden Koordinatensystemen Es ist eine grundlegende Erkenntnis, dass die Wirkung physikalischer Gesetze nicht von der Wahl des Koordinatensystems abhängig ist. Allerdings hängt die mathematische Beschreibung von Vorgängen von der Wahl des Bezugssystems ab. Beim Übergang von einem Inertialsystem zu einem anderen ändern sich die Geschwindigkeiten der Bewegung aller Teilchen just um die Differenz der Geschwindigkeiten beider Inertialsysteme. Werden in einem Inertialsystem Beschleunigungen von Körpern als Folge angreifender Kräfte gemessen, so werden in einem anderen Inertialsystem genau dieselben Beschleunigungen festgestellt. Lediglich die Teilchengeschwindigkeiten ändern sich um den Wert der Differenzgeschwindigkeit der Bezugssysteme. Somit sind Rückschlüsse auf die angreifenden Kräfte als Ursache der Teilchenbewegung unabhängig von der Wahl des Bezugssystems. Begibt sich der Beobachter dagegen in ein beschleunigt bewegtes Bezugssystem, werden im Vergleich mit einem Inertialsystem alle Ortsvektoren von Körpern mit einer zusätzlichen Beschleunigung beaufschlagt. Eindeutige Rückschlüsse auf angreifende Kräfte sind somit nicht ohne weitere Informationen möglich. Linear beschleunigtes Bezugssystem Ein im ruhenden Bezugssystem ruhender Körper bewegt sich im mit a translatorisch beschleunigten Bezugssystem mit der Beschleunigung atrans = − a . Bewegt sich der Körper im ruhenden System mit der Beschleunigung a (es wirkt auf ihn die eingeprägte Kraft m ⋅ a ), so befindet er sich im beschleunigten Bezugssystem in Ruhe. Für einen im beschleunigten Bezugssystem ruhenden Körper gilt somit ∑ F − m⋅a = 0 (1) i mit den eingeprägten Kräften Fi und der sogenannten Scheinkraft oder Trägheitskraft FT = −m ⋅ a . Bewegt sich der Körper im beschleunigten Bezugssystem mit der Beschleunigung atrans , so gilt ∑ F − m⋅a = m⋅a . (2) Als Beispiel soll ein Aufzug betrachtet werden. Auf eine sich darin befindliche Person wirken die Gewichtskraft Fg = mg und die Zwangskraft FZ . Bei ruhendem Aufzug (bzw. v =const.) gilt a = 0 und i trans somit folgt aus (1) Fg + FZ = 0 . Bewegt sich der Aufzug beim Anfahren mit a > 0 beschleunigt nach oben, gilt m ⋅ g + FZ − m ⋅ a = 0 , folglich FZ = m ⋅ ( a − g ) . Der Bodendruck, welchen der Insasse verspürt, ist vom Betrag gleich m(a + g) und somit größer als bei ruhendem Aufzug. Wirkt eine weitere eingeprägte Kraft F (z.B. Federkraft auf einen in Schwingung versetzten Federschwinger), so führt dies zu einer von Null verschiedenen Beschleunigung im beschleunigten Bezugssystem gemäß F = m ⋅ atrans . Rotierendes Bezugssystem Betrachtet wird zunächst eine um die Z-Achse im Abstand r gleichmäßig rotierende Punktmasse. Hierzu ist die Wirkung einer Zwangskraft FZ = − m ⋅ ω 2 ⋅ r notwendig. Im mit der Winkelgeschwindigkeit ω um die Z-Achse rotierenden Bezugssystem befindet sich die PM in Ruhe. Allerdings scheint es, als ob eine Kraft auf die PM einwirke, welche diese nach außen zieht. Diese Trägheitskraft Fzentr = m ⋅ ω 2 ⋅ r ist die Gegenkraft zur Radialkraft, zeigt somit nach außen und wird als Zentrifugalkraft bezeichnet. Als Insasse eines PKW erfährt man dies während der Kurvenfahrt. Im Kreisverkehr vermeint man die Wirkung einer Kraft zu spüren, die den Körper zur Kurvenaußenseite zieht. Da man gern im Auto bleiben möchte (somit im bewegten Bezugssystem in Ruhe), stemmt man sich dagegen, wobei gut geformte Sportsessel dienlich sind. Diese Kraftentfaltung wirkt als eingeprägte Kraft und hält den Körper auf Kreisbahn. Ein Außenstehender wundert sich darüber nicht, er sieht ja eine Masse auf Kreisbahn. Die Zentrifugalkraft existiert für ihn nicht. Auch den Insassen zieht real nichts zur Kurvenaußenseite, die Zentrifugalkraft ist eine Scheinkraft und nicht Folge einer Wechselwirkung. Allerdings wirkt Reibung auf die Pneus, wird über Fahrgestell und Karosserie auf den Sitz übertragen und wirkt auf den Körper des Fahrers in Richtung Kurveninnenseite. Bewegt sich die Punktmasse im rotierenden System, ändert sich der Abstand zur Rotationsachse und somit die Scheinkraft. Die Beschreibung des allgemeinen Falles erfordert deshalb etwas mehr Aufwand: Bezugssysteme Das ruhende System X,Y,Z und das rotierende System x,y,z haben den gleichen Ursprung. Die Rotation erfolgt um die zu Z parallele z-Achse mit der Winkelgeschwindigkeit ω. Dargestellt ist ein in XYZ ruhender Vektor B sowie seine Änderung in xyz bei einer kleinen Drehung von xyz um den Winkel dϕ Auf der Abbildung ist das rotierende System xyz als ruhend dargestellt, der mitbewegte Beobachter bemerkt eine entgegen gesetzte Rotation des Systems XYZ. Nach der kurzen Zeit dt haben sich dessen X- und Y-Achsen um den Winkel -dϕ gedreht (gestrichelt dargestellt). Sei B eine physikalische Größe. Da der Vektor sich nicht ändert, wenn man ihn auf unterschiedliche Koordinatensysteme projiziert (hierbei sind natürlich die Koordinaten verschieden voneinander), gilt BXYZ = Bxyz . Der in XYZ ruhende Vektor B zeigt gegenüber xyz eine Rotation. Im Zeitintervall dt ändert er sich um den Wert dBrot dBrot = −dϕ × B, folglich = −ω × B . dt Nun kann sich der Vektor B im System XYZ im Zeitintervall dt zusätzlich um dB ändern (ist also nun keine Konstante mehr). Insgesamt ändert er sich dadurch im rotierenden System um dBrot dB dBrot = dB − dϕ × B, folglich = −ω × B dt dt dB dBrot oder umgestellt = +ω×B. dt dt Da B ein beliebiger Vektor ist, schreibt man diese Gleichung als Operator für den Übergang vom ruhenden in ein rotierendes Koordinatensystem auf: d d = +ω × . (3) dt dt rot Wird der Operator auf einen Ortsvektor R angewendet, der einen Punkt in XYZ angibt, erhält man dR rot d dessen Geschwindigkeit R=v = + ω × R = vrot + ω × R . dt dt Für den Fall ω = 0 ist die Lösung trivial, weil die Geschwindigkeiten in beiden Systemen gleich sind ɺ ( v = vrot ). Befindet sich der Punkt im rotierenden System in Ruhe ( Rrot = vrot = 0 ), bewegt er sich im ruhenden System mit v = ω × R . Ein im ruhenden System konstanter Ortsvektor R vollführt im rotierenden System eine Kreisbewegung mit vrot = −ω × R . Wird der Operator (3) noch einmal angewendet, erhält man für die Beschleunigung dv d vrot + ω × R = + ω × vrot + ω × R dt dt rot ( ) ( ( ) ) a = arot + 2ω × vrot + ω × ω × R . Der Betrachter im rotierenden System verfolgt die Bewegung einer Masse m mit der Beschleunigung arot . Die effektiv wirkende Gesamtkraft besteht aus der eingeprägten (Gesamt-)Kraft F und zwei Scheinkräften: Feff = marot = effektive Gesamtkraft F ( ) − 2m ω × vrot − m ω × ω × R . = eingeprägte + Corioliskraft + Zentrifugalkraft (4) Kraft ( ) Der dritte Summand beschreibt die Zentrifugalkraft Fzentr = − m ω × ω × R = m ω 2 R . Wenn sich die Masse im rotierenden Bezugssystem bewegt, tritt eine weitere Scheinkraft auf, die Corioliskraft Fcor = −2m ω × vrot . Zur Veranschaulichung folgender Versuch: Auf einer Kreisscheibe, die mit ω rotiert, befindet sich eine Punktmasse m, welche mit der Scheibe rotiert und durch einen an deren Mittelpunkt befestigten Faden auf Abstand r fixiert ist. Der auf der Scheibe mitrotierende Beobachter stellt die Zentrifugalkraft als Scheinkraft fest, welche danach trachtet, die Punktmasse radial nach außen zu beschleunigen. Um den Abstand zur Drehachse konstant zu halten, wird der Faden benötigt, der mit einer eingeprägten Kraft auf die Masse wirkt. Der außen stehende, also ruhende, Beobachter sieht die Kreisbahn als Folge der Radialkraft, die vom Faden auf die Masse wirkt. Wenn der Faden durchtrennt wird, sieht er, dass sich die Masse (reibungsfrei) tangential und gleichförmig geradlinig fortbewegt. Ganz anders nimmt der rotierende Beobachter den Vorgang war. Nach Durchtrennen des Fadens (in horizontaler Richtung wirkt keine eingeprägte Kraft mehr) entfernt sich die Punktmasse von der Rotationsachse mit der Beschleunigung azentr = m ⋅ ω 2 ⋅ r , dies aber nicht geradlinig (radial), sondern auf einer gekrümmten Bahn, bleibt dabei hinter der Drehbewegung zurück. Es scheint eine Kraft zu wirken, welche die Bewegungsrichtung der Punktmasse ändert (seitlich ablenkt). Diese Richtungsänderung erfolgt durch die Corioliskraft. Wirkung der Corioliskraft Auf der Scheibe, die mit der Winkelgeschwindigkeit ω rotiert, werden Punktmassen, die sich anfangs radial bewegen, in ihrer weiteren Bewegungsrichtung abgelenkt. Bei der gewählten Richtung der Rotation erfolgt die Ablenkung, in Bewegungsrichtung gesehen, stets nach rechts. Bei umgekehrter Rotation entsprechend nach links. Die Corioliskraft ist für unterschiedliche Bewegungsrichtungen im rotierenden System dargestellt, die daraus resultierenden Trajektorien durch gepunktete Kurven. Satellitenaufnahme einer Zyklone (Tiefdruckgebiet) auf der Nordhalbkugel (http://www.meteoworld.de/index9.htm) Bewegte Luftmassen erfahren durch die Erdrotation eine Ablenkung infolge der Corioliskraft auf der Nordhalbkugel nach rechts, auf der Südhalbkugel nach links. Anstatt nur dem Druckgefälle zu folgen, strömen Luftmassen in ein Tiefdruckgebiet deshalb nicht radial ins Zentrum des Tiefdrucks, sondern werden abgelenkt und rotieren auf der Nordhalbkugel entgegen dem Uhrzeigersinn um das Zentrum des Tiefs. Analog strömen die Luftmassen aus einem Hoch nicht radial nach außen, sondern rotieren im Uhrzeigersinn um den Kern des Hochdruckgebietes. Prüfungsaufgabe 2008 Auf einer mit der konstanten Winkelgeschwindigkeit ω rotierenden Kreisscheibe befindet sich ein kleines Wägelchen im Abstand r0 von der Rotationsachse auf einer in radialer Richtung montierten Schiene. Ein Beobachter befindet sich im Zentrum der Scheibe, rotiert mit der Scheibe mit und beobachtet das Wägelchen. Zum Zeitpunkt t = 0 löst er die v (r) Arretierung und beobachtet, dass sich der Wagen beschleunigt nach außen bewegt (Reibung ist zu vernachlässigen; r ω wird konstant gehalten). r0 a) Charakterisieren Sie die Kraft, welche den Wagen in radialer Richtung beschleunigt. b) Stellen Sie die Bewegungsgleichung auf für die Bewegung des Wägelchens in radialer Richtung. c) Bestimmen Sie die allgemeine Lösung r(t) der Bewegungsgleichung. d) Wie lautet die spezielle Lösung mit den Randbedingungen r(t=0) = r0 und vr(t=0) = 0? e) Eine halbe Umdrehung nach Freigabe des Wägelchens ist der Abstand von der Rotationsachse auf welchen Wert angewachsen? Geg.: ω, r0 Lösung: a) Diese Kraft wird als Zentrifugalkraft bezeichnet und ist eine Scheinkraft. Sie ist somit nicht Folge einer Wechselwirkung (keine eingeprägte Kraft) sondern der trägen Masse des Körpers (Trägheitskraft) geschuldet. b) Eine Punktmasse m die sich auf einer Kreisbahn von Radius r mit konstanter Winkelgeschwindigkeit ω bewegt, befindet sich für den mitbewegten Beobachter in Ruhe. Nach dem d’Alembertschen Prinzip befindet sich ein Körper im beschleunigten Bezugssystem dann in Ruhe, wenn die Summe aller eingeprägten Kräfte und Scheinkräfte gleich Null ist. Die Zentrifugalkraft Fzentr ist Gegenkraft zu der Radialkraft Fr , die einen Körper auf der Kreisbahn hält (Zwangskraft). In diesem Fall gilt also Fzentr + Fr = 0 . Da in radialer Richtung im aktuellen Fall aber keine Zwangskraft wirken soll ( Fr = 0 ), tritt für den im Zentrum der Scheibe mit rotierenden Beobachter eine Radialbeschleunigung mrɺɺ auf: mrɺɺ = m ω 2 r . In der Normalform lautet diese Differentialgleichung 2. Ordnung rɺɺ − ω 2 r = 0 c) Lösung der Bewegungsgleichung erfolgt mittels Exponentialansatz r (t ) = c eλ t Dieser Ansatz wird zweimal nach t differenziert und in die DGlg. eingesetzt: c λ 2 eλ t − ω 2 c eλ t = 0 . Man erhält die charakteristische Gleichung λ 2 − ω 2 = 0 mit den beiden reellen Wurzeln λ1,2 = ± ω . Die den beiden Wurzeln entsprechenden Lösungsfunktionen werden linear miteinander kombiniert und bilden die allgemeine Lösung: r (t ) = c1eω t + c2 e −ω t d) Die Nebenbedingungen werden eingesetzt: r (0) = r0 = c1 + c2 rɺ(t ) = c1ω eω t − c2ω e −ω t r0 2 Man erhält die diesen Nebenbedingungen genügende spezielle Lösung r r (t ) = 0 ( eω t + e −ω t ) = r0 cosh ωt 2 rɺ(0) = c1ω − c2ω = 0 ⇒ c1 = c2 = e) Die für eine halbe Umdrehung benötigte Zeit entspricht einer halben Periode T ωt =ω =π 2 r r (T ) = 0 (eπ + e −π ) ≃ 11, 6 r0 2 2 Zusätzlich ist von Interesse, in welchem Maße die tangential auf die Masse wirkende Zwangskraft Ft anwächst, die von der Schiene ausgeübt wird. Diese kompensiert gerade die Corioliskraft. r Ft (t ) = 2m ω ⋅ vrot = 2m ω 2 ⋅ 0 ( eω t − e−ω t ) = 2m ω 2 r0 sinh ωt . 2 Die Tangentialkraft ist zunächst gleich Null, wächst aber nach Freigabe der Masse rasch an und nähert sich dem doppelten Wert der Zentrifugalkraft Fzentr (t ) = mω 2 r0 cosh ωt , kann also beachtliche Werte annehmen. Auf nebenstehender Grafik ist die Zeitabhängigkeit des Abstandes r(t) dargestellt (blaue Kurve). Diese entspricht einer Kosinus Hyperbolicus-Funktion. Die rote Kurve entsprich der Zeitabhängigkeit der Zwangskraft Ft, die der Corioliskraft Fcor vom Betrag her gleich ist. Der Kurvenverlauf entspricht dem einer Sinus Hyperbolicus-Funktion. Während der prägende Einfluss der Corioliskraft auf das Wettergeschehen unstrittig ist, sind andere Auswirkungen mit Skepsis zu betrachten. So sollen die nach Norden fließenden sibirischen Ströme Ob, Jenissej und Lena asymmetrische Flussbetten aufweisen, da sie ja durch die Corioliskraft nach Osten abgelenkt werden. Ist dort wirklich das Flussbett tiefer als an der Westseite? Ebenso werden Schienenstränge, auf denen Züge nach Norden fahren, angeblich auf der Ostseite stärker abgenutzt als auf der Westseite. Analog seien die Verschleißerscheinungen auf dem Gegengleis auf der Westschiene stärker ausgeprägt. Untersuchen wir die folgende Situation: Ein Zug fährt auf ϑ =6o° nördlicher Breite mit 60m/s bzw. 216 km/h nach Norden. Die Masse eines ICE beträgt je Radsatz (Triebkopf) 20 000 kg. Wie groß ist die hierbei auftretende Corioliskraft? Damit die Insassen sich nicht ständig wegen der Corioliskraft festhalten müssen, wenn sie mal ins Bordrestaurant gehen, könnte man das Gleis etwas in Schieflage verlegen, die Ostseite etwas höher als die Westseite. Dann würde der Passagier ja gar nichts wahrnehmen, da die Corioliskraft durch eine im Idealfall gleich große Hangabtriebskraft kompensiert würde. Der Koordinatenursprung möge sich an der Erdoberfläche befinden, dort wo der Zug gerade fährt. Die x-Achse des Koordinatensystems zeigt nach Osten, die z-Achse verläuft parallel zur Erdachse und ist nach Norden ausgerichtet, die y-Achse zeigt auf die Erdachse. Für die Corioliskraft ergibt sich somit ex ey ez sin ϑ FC = −2m ω × v = −2m ω v 0 0 1 = 2m ω v 0 . 0 0 sin ϑ cos ϑ 2 ⋅ 20 ⋅103 kg ⋅ 2π ⋅ 60m ⋅ 3 =151N. 86400s ⋅ s ⋅2 Das ist sehr wenig im Vergleich zur Gewichtskraft eines Waggons. Um welchen Wert müssten die Gleisbauer das Gleis gegen die Horizontale schief verlegen? Bei einer Spurweite von b=1435mm ist das rechte Gleis um h höher als das linke. h FC = FHA → 2m ω v sin ϑ = mg sin α ≅ mg b 2 2ω v b sin ϑ 2 ⋅ 2π ⋅ 60m ⋅1, 435m ⋅ s 3 h= = =1,1mm. g 86400s ⋅ s ⋅ 9,81m ⋅2 Nach der Europäischen Norm zur Gleislagequalität (EN 13848-1:2003+A1:2008) erfolgt die Beurteilung der sog. Überhöhung (Differenz der Höhe beider Schienenlaufflächen gegenüber der waagerechten Bezugsebene) mittels Messwagen mit einer Auflösung ≤0,5mm. Die absolute Genauigkeit beträgt dabei ±5mm, wobei die Differenz aufeinander folgender Messungen (an gleicher Stelle) ±1mm betragen darf. Die nach den aktuell geltenden Gesetzen einzuhaltende Genauigkeit bei der Verlegung von Gleisen ist somit um den Faktor 5 größer als erforderlich wäre, um den Coriolis-Effekt gezielt auszugleichen. Mithin sind auch die existierenden Gleisanlagen weit davon entfernt, an ihrem Verschleißzustand mögliche Folgen dieses Effektes nachweisen zu gestatten. Der Betrag der Corioliskraft errechnet sich zu FC = 2m ω v sin ϑ = Was das Flussbett sibirischer Ströme anbetrifft – hier ist wegen der viel geringeren Fließgeschwindigkeit die Corioliskraft je Masse bewegten Materials noch deutlich geringer. Da sich der Fluss sein Bett selber schafft, würde eine merkliche Querkraft zur Hangabtriebskraft auch nur dazu führen, dass der Fluss etwas schräg zur Hangneigung fließen würde, bis sich beide Einflüsse die Waage halten. Letztendlich würde das Flussbett wieder einen schön symmetrischen Querschnitt aufweisen.