Anwendertipps: Frequenzumrichter
Werbung

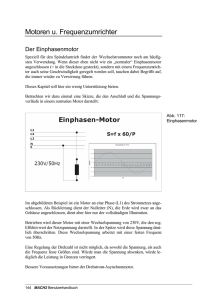
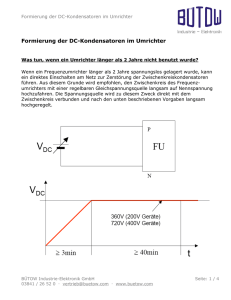
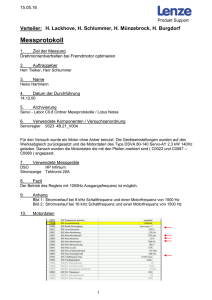
Anwendertipps: Frequenzumrichter Frequenzumrichter: Hinweise für den Anwender Inhalt 1. Zweck .............................................................................................................................................................3 2. Allgemeines zu Frequenzumrichtern..............................................................................................................3 2.1 Funktion und Aufbau ...............................................................................................................................3 2.2 Netzrückwirkungen..................................................................................................................................4 2.3 Zwischenkreiskondensator......................................................................................................................4 2.4 Schlanker Zwischenkreis ........................................................................................................................4 3. Wahl des Motors ............................................................................................................................................5 3.1 Motordaten ..............................................................................................................................................5 3.2 Thermistorschutz (Kaltleiter) ...................................................................................................................6 3.3 Motorisolation ..........................................................................................................................................6 3.4 Fremdbelüftung .......................................................................................................................................6 4. Motorbelastbarkeit am Frequenzumrichter ....................................................................................................6 5. Leistungs- oder Stromreduktion des Frequenzumformers.............................................................................6 5.1 Stromreduktion bei erhöhter Umgebungstemperatur..............................................................................7 5.2 Stromreduktion bei niedrigem Luftdruck .................................................................................................7 5.3 Leistungsreduktion in Funktion der Schaltfrequenz ................................................................................7 5.4 Stromreduktion bei langen Motorkabeln oder größeren Querschnitten..................................................7 6. Einstellungen am Frequenzumrichter ............................................................................................................8 6.1 Motordaten ..............................................................................................................................................8 6.2 Anlagespezifische Daten.........................................................................................................................9 6.3 Steuer- und Sollwertsignal ................................................................................................................... 10 7. Geschirmte Leitungen ................................................................................................................................. 11 7.1 Geschirmte Motorleitungen .................................................................................................................. 11 7.2 Schirmung der Steuersignale............................................................................................................... 11 8. Länge der Motorleitungen ........................................................................................................................... 12 9. Vor-Ort Schalter........................................................................................................................................... 12 10.Mehrmotorenbetrieb .................................................................................................................................... 12 10.1 Motorschutz.......................................................................................................................................... 12 10.2 Zu- und Abschalten der verschiedenen Motoren ................................................................................. 13 11.Hinweise ...................................................................................................................................................... 13 11.1 RCD (Fl – Schutzschalter) ................................................................................................................... 13 11.2 Hinweise für Wartungspersonal ........................................................................................................... 13 12.Messungen am FU ...................................................................................................................................... 14 FCHinweiseIII.doc Stand 03 / 2009 Seite 2 von 14 Frequenzumrichter: Hinweise für den Anwender 1. Zweck Dieses Dokument soll Inbetriebnehmer und Anfänger beim Einsatz von Frequenzumrichtern unterstützen. Es ist kein Ersatz für Betriebsanleitungen oder Projektierungshandbücher. 2. Allgemeines zu Frequenzumrichtern 2.1 Funktion und Aufbau Mit Frequenzumrichtern (FU) ist es möglich, Drehstrommotoren mit einer variablen Frequenz und Spannung von typisch ca. 0,1 Hz bis 100 Hz (oder 1000 Hz) bzw. 0 V bis 400 V (690 V) zu betreiben. Das Funktionsprinzip von FU ist aus untenstehendem Blockschaltbild ersichtlich. Die Netzspannung wird zuerst gleichgerichtet und im Zwischenkreis geglättet bevor sie dann mit einer Leistungsbrückenschaltung wieder in eine Wechselspannung gewandelt. Diese Umwandlung erfolgt meistens durch eine Pulsbreitenmodulation (PWM) mit einer Schaltfrequenz von heute üblichen 2 kHz bis 16 kHz. Die Regelgenauigkeit eines Frequenzumrichter bestimmt auch seine Einsatzmöglichkeiten. Typischerweise gibt es günstige Frequenzumrichtreaufbauvarianten mit einer einfacher Strommessung im Zwischenkreis. Diese, so ist es meist in den technischen Datenblättern ersichtlich, können jedoch gerade im unteren Drehzahlbereich nicht so genau regeln wie Frequenzumrichter, welche kostenintensiver alle 3 Motorphasen messen. Für dynamische Hubwerke sind letztere vorzuziehen. Ein Vorteil von Frequenzumrichtern ist seine Bremswirkung auf den angesteuerten Motor mit ca. 20 bis 30% seines Nennmoments. Diese Bremswirkung kann durch einen Bremschopper mit externem Lastwiderstand noch verstärkt werden. Solche Bremschopper werden, je nach Hersteller des Frequenzumrichters, standardmäßig oder als Option angeboten. Gleichrichter Wechselrichter DC-Drossel 1 Bremschopper L1 / 91 L2 / 92 Ladeschaltung NTC U / 96 V / 97 W / 98 L3 / 93 DC-Drossel 2 R+ / 82 +DC / 89 -DC / 88 R- / 81 Bremswiderstand Prinzipschaltbild: Spannungsgeführten Frequenzumrichter mit Bremschopper FCHinweiseIII.doc Stand 03 / 2009 Seite 3 von 14 Frequenzumrichter: Hinweise für den Anwender 2.2 Netzrückwirkungen Die für die Funktionsweise des Umrichters nötige Umwandlung von Wechsel in Gleichspannung erfolgt bei einem Umrichter in einem Drehstromnetz üblicherweise mit einer B6 Gleichrichterschaltung. Durch die nicht sinusförmige Stromaufnahme von Gleichrichterschaltungen wird das Netz belastet. Ein Transformator (4% Uk) sollte maximal mit 40% Gleichrichterlast (Umrichter, USV, Energiespaarlampen...) betrieben werden. Um dem Effekt, der durch die nicht sinusförmige Stromentnahme entsteht, entgegenzuwirken, werden Drosseln entweder im Zwischenkreis oder am Eingang des Frequenzumrichters verwendet. 2.3 Zwischenkreiskondensator Der Kondensator im Zwischenkreis übernimmt verschiedene Funktionen. Zum einen glättet er die pulsierende Gleichspannung des Gleichrichters, zum anderen dient er als Energiespeicher bei z.B. Laststößen. Wegen der großen Energiedichte werden üblicherweise Elektrolytkondensatoren eingesetzt, deren Lebensdauer allerdings aufbaubedingt begrenzt ist. Faktoren für die Lebensdauer sind neben Qualität des Bauteils u.a. Umgebungsbedingungen und Netzqualität. 2.4 Schlanker Zwischenkreis Um Netzrückwirkungen zu reduzieren, wurden in den letzten Jahren Frequenzumrichter mit so genanntem „Schlanken Zwischenkreis“ entwickelt. Bei diesem Verfahren wird auch die Kapazität des Kondensators stark herabgesetzt, was auch den Ersatz von Elektrolytkondensatoren durch preisgünstigere Kondensatortypen ermöglicht. Die Netzrückwirkungen im unteren Frequenzbereich werden so auch ohne Drosseln stark reduziert. Allerdings entstehen Störungen im höheren Frequenzspektrum, die sonst nicht auftreten Netzrückwirkung FU schlanker Zwischenkreis Netzrückwirkung FU mit Zwischenkreisdrossel Beim Einsatz eines Umrichters mit schlankem Zwischenkreis ist zu beachten, dass die kleinere Kapazität das Gerät anfälliger gegenüber Netzeinbrüchen und Spannungsschwankungen macht. Durch die reduzierte Glättungswirkung erreicht die Ausgangsspannung außerdem nur ca. 90% der Netzspannung. Dadurch nimmt der Drehstrommotor bei Nennleistung einen 10% höheren Strom auf und erwärmt sich zusätzlich. FCHinweiseIII.doc Stand 03 / 2009 Seite 4 von 14 Frequenzumrichter: Hinweise für den Anwender 3. Wahl des Motors 3.1 Motordaten Für kleinere Motoren bis 3,0 kW ist eine Stern- / Dreieckschaltung bei 400 / 230 V üblich. Wird dieser Motor nur mit max. 50Hz betrieben, so wird er in Stern angeschlossen. Die Feldschwächung beginnt bei 50Hz und somit fällt das Drehmoment ab. Um auch bei Drehzahlen höher als 50Hz das volle Moment zu erhalten, kann dieser Motor (am FU) in Dreieck angeschlossen und betrieben werden, d.h. 230 Volt bei 50 Hz. In dieser Betriebsart ist das volle Moment bis ca. 87 Hz möglich. Stern - Schaltung a} Dreieck - Schaltung b} 400 350 Spannung [V] 300 250 200 150 100 50 0 0 10 20 30 40 50 60 70 80 90 100 Frequenz [Hz] a) Feld-Schwächpunkt bei 50Hz b) Feld-Schwächpunkt bei 87Hz Für Motoren größer 3,0 kW ist eine Stern- / Dreieckschaltung mit 690 / 400 Volt üblich. Diese Motoren müssen in Dreieck Betrieb angeschlossen werden. Betrieb mit vollem Moment ist nur bis 50 Hz möglich. Sollen Motoren größer 3,0 kW in Stern/Dreieck bei 400 / 230 Volt angeschlossen werden, so ist ein Betrieb mit vollem Moment bis 87 Hz auch möglich. Wichtig: Bei 87 Hz Dreieck Betrieb mit Frequenzumrichtern muss auf Folgendes geachtet werden: • Der FU muss strommäßig entsprechend höher ausgelegt sein (ca. 1,73-fach). Dies bedeutet, der FU darf nicht nach seiner kW (kVA)-Angabe ausgewählt werden. • Die Anlage muss für die entsprechende Leistung bei 87 Hz ausgelegt sein. • Der Motor muss für die entsprechende Spannung (400 Volt über jeder Wicklung) zugelassen sein. Dies sollte durch den Herstellern bestätigt werden. FCHinweiseIII.doc Stand 03 / 2009 Seite 5 von 14 Frequenzumrichter: Hinweise für den Anwender 3.2 Thermistorschutz (Kaltleiter) Der in die Wicklung integrierte Kaltleiter (Thermistor) ist die zu bevorzugende Lösung des Motorschutzes. Die Gründe sind wie folgt: • Der FU begrenzt den Strom, deshalb ist ein Thermoblock nicht wirksam. • Der FU überwacht die thermische Überlastung jedoch nicht, wenn der Motor über den FU mehrmals ein- und ausgeschaltet wird. • 3.3 3.4 Die Überwachung bei niederen Drehzahlen ist nicht sichergestellt (bei Fehleinstellungen). Motorisolation • Vorzugsweise Klasse F (Lebensdauer). • Verstärkte Phasenisolation (Doppelisolation) ist sinnvoll. Fremdbelüftung Bei voller Nennlast ist eine Fremdbelüftung bei einem Betrieb mit weniger als 25...30 Hz vorzusehen. Im Zweifelsfall ist eine Abklärung mit dem Motorenlieferanten nötig. Der Fremdlüfter darf nicht am FU angeschlossen werden. Durch Überdimensionierung der Motoren ist ein Betrieb ohne Fremdbelüftung auch bei niedrigen Drehzahlen möglich. 4. Motorbelastbarkeit am Frequenzumrichter Typischerweise können Standard FU den 1,50 bis 1,60-fachen Strom für eine Minute liefern. Innerhalb einer Sekunde kann, je nach Hersteller, sogar das 1,8 bis 2-fache des FU-Nennstromes geliefert werden. Diese Möglichkeiten sind für Schweranläufe gedacht, um ein hohes Losbrechmoment zu ermöglichen. Über der Nenndrehzahl des Motors fällt das Drehmoment stark ab, da die Motorspannung nicht mehr weiter mit dem eingestellten Sollwert (Frequenz) ansteigen kann. (Der FU liefert bis zu max. 110% der Versorgungsspannung). Eine Möglichkeit das volle Moment bis 87 Hz zu erreichen, ist der Betrieb eines Motors, welcher für eine Sternschaltung ausgelegt ist, aber im Dreieck betrieben wird. In diesem Fall wird bei richtiger Einstellung des FU die Spannung bis zu 87Hz proportional dem Sollwert ansteigen. Der FU muss jedoch entsprechend größer ausgelegt werden (siehe Abschnitt 3.1). 5. Leistungs- oder Stromreduktion des Frequenzumformers Bei der Auswahl des richtigen FU‘s darf nicht nur von der Leistungsangabe des FU-Herstellers ausgegangen werden. Bei speziellen Motoren, wie z.B. wassergekühlten Motoren können die Nennstromwerte deutlich von den üblichen Werten abweichen. Auch beim Einsatz eines Motors mit vollem Moment bis 87Hz ist der typische Stromwert das 1,73-fache des Nennstromes (Nennstrom bei Dreieck- statt Sternschaltung). Auch Motore modernerer Bauart haben leicht höhere Nennstrom-Werte. Es ist deshalb sinnvoll, den FU nach dem Nennstrom des zugehörenden Motors auszuwählen. FCHinweiseIII.doc Stand 03 / 2009 Seite 6 von 14 Frequenzumrichter: Hinweise für den Anwender Je nach Betriebsart und Umgebungsbedingungen eines FU‘s sind Stromreduktionen zu berücksichtigen. Die typischen Angaben von FU-Herstellern sollten immer beachtet werden. 5.1 Stromreduktion bei erhöhter Umgebungstemperatur Wird die vom Hersteller angegebene Umgebungstemperatur des FU‘s im Schaltschrank überschritten, so ist eine Reduzierung des Ausgangsstromes notwendig. Es gibt FU-Hersteller, die nur eine Umgebungstemperatur von max. 40°C zulassen. Diese Temperatur wird gemäß EN 60204-1 als Umgebungstemperatur des Schaltschrankes gefordert. Da jedoch jeder Schaltschrank eine Eigenerwärmung aufweist, muss der eingesetzte FU entsprechend ausgelegt werden. 5.2 Stromreduktion bei niedrigem Luftdruck Üblicherweise sind bei FU‘s bis 1000m über dem Meeresspiegel keine Leistungsreduzierung erforderlich. Oberhalb einer Höhe von 1000m über dem Meeresspiegel muss die Umgebungstemperatur oder der max. Ausgangsstrom entsprechend reduziert werden. 5.3 Leistungsreduktion in Funktion der Schaltfrequenz Da die meisten FU‘s eine einstellbare Schaltfrequenz (Frequenz der PWM) haben, welche typisch zwischen 2 kHz und 16 kHz liegt, muss gegebenenfalls eine Leistungsreduktion entsprechend der gewählten Schaltfrequenz (Schaltverluste) vorgesehen werden. Nicht bei allen FU-Herstellern oder bei allen FU-Typen eines Herstellers wird eine Leistungsreduktion bei höheren Schaltfrequenzen verlangt. 5.4 Stromreduktion bei langen Motorkabeln oder größeren Querschnitten Wird die vom FU-Hersteller angegebene Motorleitungslänge überschritten, so bestehen folgende Möglichkeiten für einen reibungslosen Betrieb: • Einsatz von Motorleitungsdrosseln. • Gegebenenfalls Reduktion des Ausgangsstromes, sofern dies vom Hersteller so angegeben wurde. Es ist unbedingt zu beachten, dass die Kabellängen bei geschirmten und ungeschirmten Leitungen sehr unterschiedlich sind. Werden Motorkabel mit einem größeren Querschnitt eingesetzt, so sollte der Ausgangsstrom um je 5% für jede Stufe, um die der Kabelquerschnitt erhöht wird, reduziert werden. (Ein höherer Kabelquerschnitt bedeutet eine erhöhte kapazitive Last und damit einen erhöhten Ableitstrom gegen Erde). FCHinweiseIII.doc Stand 03 / 2009 Seite 7 von 14 Frequenzumrichter: Hinweise für den Anwender 6. Einstellungen am Frequenzumrichter Moderne Frequenzumrichter können hunderte von einstellbaren Parametern haben. Hier werden nur die Notwendigsten davon behandelt. Die übrigen Parameter werden meist nur für erweiterte Anwendungen wie Hubwerke, Prozeß- oder Drehzahlregler verändert. Die optimalen Einstellungen für den „Normalgebrauch" sind in der Werkseinstellung bei Auslieferung der Geräte schon voreingestellt. Für eine einfache Inbetriebnahme sind drei Parameter-Gruppen (Motordaten, anlagespezifische Daten und Steuerungssignale) notwendig. Die Einstellung des FU‘s sollte nach der Betriebsanleitung des Umrichters und der Anlage bzw. Maschine erfolgen. 6.1 Motordaten Motor 3~ 50Hz IEC 34-1 0.75 kW 1385 rpm CI . F cos = 0.75 400 230 V 2.3 A 3.98 A Cat. No. IP 54 Bevor ein FU mit Motor in Betrieb genommen wird, sind unbedingt die Motordaten zu programmieren. Ohne diese Programmierung kann der Motor im Betrieb zerstört werden (z.B. durch Überhitzung). Als Beispiel werden hier die Daten für das obige Typenschild benutzt. Bei einfachsten U/f Umrichter ist die entfällt ggfs. die Eingabe der Motordaten. Nennspannung: 400 V (Sternschaltung) Nennfrequenz: 230 V (Dreieckschaltung). 50 Hz Dieser Wert bestimmen den Feldschwächepunkt (oder den Eckpunkt für die sog. U/fKennlinie) bei 50 Hz. Soll bis 87 Hz ohne Feldschwächung gearbeitet werden, muss der Motor in Dreieck (230 V) angeschlossen werden. Der Wert der Nennspannung muss dann auf 230 V im FU programmiert werden. Für FU’s (mit 400 V Versorgung) kann es vorkommen, dass der Wert 230 V nicht einstellbar ist. Hier muss man 400 V für die Motornennspannung und 87 Hz als Motornennfrequenz eingeben. Es ist dabei zu beachten, dass der Motorstrom entsprechend höher ist. Nennstrom: 2,30 A (Sternschaltung). Bei Dreieckschaltung ist 3,98 A zu programmieren. Dient dem FU zur Überwachung des Motorstroms (Überstrom, thermische Überlastung, Anlaufstrom). Nenndrehzahl: 1385 U/Min. Somit ist dem FU der Schlupf des Motors bekannt (Schlupfkompensation). Je nach Fabrikat und Umrichterprinzip (linear, vector) werden noch andere Motordaten verlangt: Nennleistung: 0,75 kW Cos Phi: 0,75 Neben den Motordaten muss in seltenen Fällen noch die Netzspannung programmiert werden. FCHinweiseIII.doc Stand 03 / 2009 Seite 8 von 14 Frequenzumrichter: Hinweise für den Anwender 6.2 Anlagespezifische Daten Für den Betrieb einer Anlage oder Maschine ist es wichtig, anlagespezifische Daten vor der Inbetriebnahme zu programmieren. Hier wird von einer Steuerung ausgegangen, weil die Auflistung aller möglichen Fälle den Rahmen dieses Dokumentes sprengen würde. Folgende Parameter werden am häufigsten benutzt: Min. Drehzahl: Begrenzt die mögliche Drehzahl nach unten. Dies ist z.B. bei Verwendung eines Motors ohne Fremdlüftung oder bei einer Pumpe wichtig. Max. Drehzahl: Begrenzt die mögliche Drehzahl nach oben z.B. zum Schutz von Maschinen- / Anlageteilen. Andere Ausdrücke für die min./max. Drehzahl sind z.B. min./max. Frequenz oder min./max. Sollwert Beschleunigungszeit (Rampe-Auf): Eine zu kurze Beschleunigungszeit kann zum Abschalten des FU‘s wegen Überstrom in der Anlaufphase führen. Verzögerungszeit (Rampe-Ab): Ist die Verzögerungszeit zu kurz, so kann durch die Bremsenergie die Zwischenkreisspannung höher als zulässig werden. Das hat eventuell ein Abschalten des FUs zur Folge. Herstellerabhängig beziehen sich die Rampenzeiten auf unterschiedliche Eckpunkte. Übliche Rampenzeitdefinitionen sind: 0-fNetz, 0-max. Sollwert oder fest 0-3000 UPM. Drehmomentenkennlinie: (quadratisch oder konstant). Muss entsprechend der Anwendung eingestellt werden, z.B. quadratisches Verhalten für einen Ventilator oder eine Zentrifugalpumpe oder konstantes Verhalten für Förderbänder. Schlupfkompensation: Wird ein Motor am Netz mit 50 Hz betrieben, dreht die Motorwelle aufgrund des prinzipbedingten Schlupfs langsamer. Der Schlupfausgleich des Umrichter kompensiert den Schlupf durch eine höhere Frequenz am Stator des Motors. Wenn dem FU ein Sollwert von 50 Hz vorgegeben wird, dreht die Motorwelle mit 50 Hz. Der Schlupfausgleich ist auch bei wechselnden Lasten aktiv und erhöht die Drehzahlgenauigkeit auch ohne Rückführung. Voraussetzung: Die Motordaten sind richtig programmiert. FCHinweiseIII.doc Stand 03 / 2009 Seite 9 von 14 Frequenzumrichter: Hinweise für den Anwender 6.3 Steuer- und Sollwertsignal Nach der Programmierung der Motor- und anlagespezifischen Daten muss zum Schluss festgelegt werden, wie gesteuert wird. Bei diesem Hinweis, wird angenommen, dass alle nötigen Verdrahtungen an den Steuerklemmen vorgenommen wurden. Es gibt zwei Möglichkeiten zu steuern: Vor-Ort Steuerung: Man steht vor dem Gerät und startet bzw. stoppt mittels Tasten am Bedienpanel. Der Sollwert wird auch am Bedienpanel vorgegeben. Fernsteuerung: Durch digitale Signale an den Steuerklemmen wird gestartet bzw. gestoppt. Überwiegend wird mit 24 Vdc gearbeitet. „0“ (=0 V) bedeutet nicht starten oder stoppen und „1“ (=24 V) bedeutet starten. Einige Hersteller steuern mit 10 V oder 15 V. Starten/Stoppen: Es gibt die Möglichkeit mit einem Schalter (Dauersignal) zu starten und zu stoppen oder mit einem Taster (Schließer) zu starten und mit einem anderen (Öffner) zu stoppen. Das Startsignal wird auch „Reglerfreigabe“ genannt. Wechselrichtersperre: Zusätzlich zum „Reglerfreigabe“-Signal, wird aus sicherheitstechnischen Gründen an einer Klemme mit „0“ (=0 V) der Wechselrichter gesperrt (der Motor bekommt keine Spannung / Frequenz zur Verfügung gestellt) und mit „1“ (=24 V) wird der Wechselrichter freigeschaltet (Motor wird gesteuert). Sicherer Stopp: Einige Umrichter verfügen inzwischen über sichere Eingänge zum stoppen des Antriebs. Im Gegensatz z.B. zur Wechselrichtersperre wird die Funktion der Eingänge von einen Prüflabor abgenommen und zertifiziert. Es wird dabei unterschieden mit welcher Sicherheit (z.B. Sicherheitskategorie nach EN 954-1) eine definierte Stoppfunktion (z.B. Stoppkategorie nach EN 60204-1) ausgeführt wird. ACHTUNG: Stoppkategorie 0 nach EN 60204-1 bedeutet ein ungesteuertes Stillsetzen des Antriebs durch sofortiges Abschalten der Energiezufuhr. Der Antrieb trudelt nach Aktivierung des Sicheren Stopps aus. FCHinweiseIII.doc Stand 03 / 2009 Seite 10 von 14 Frequenzumrichter: Hinweise für den Anwender 7. Geschirmte Leitungen 7.1 Geschirmte Motorleitungen Motorleitungen sollten immer geschirmt geführt werden. Der Schirm muss schrankseitig, nahe beim FU, möglichst kurz und großflächig auf Erde gelegt werden. Der Schirm muss auch motorseitig auf das Gehäuse aufgelegt werden. Abhängig von Gehäusematerial des Motors empfehlen einige Motorhersteller den Schirm vom Gehäuse weiter zur Anlagenerdung zu führen. Wird die Motorleitung z.B. durch Schütze oder Sicherheitsschalter unterbrochen, so ist der Schirm durch möglichst kurze Verbindungen über diese Elemente weiterzuführen. Ist dies nicht möglich, so kann ausnahmsweise der Schirm an dieser Stelle beidseitig geerdet werden (da nur Störabstrahlung verhindert werden muss). Übrige Verdrahtungen gemäß Herstellerangaben (Vorschriften). Werden obige Richtlinien nicht eingehalten, so muss mit unzulässiger Funkstörabstrahlung, sowie mit der Beeinflussung von Fremdgeräten, wie: • Kapazitive Näherungsinitiatoren • SPS - Steuerungen • Analoge Messsignalverarbeitung • Personensuchanlagen gerechnet werden. Durch die Verwendung von Sinusfiltern (LC-Filter) am Umrichterausgang, kann ggfs. auf geschirmte Motorleitungen verzichtet werden. 7.2 Schirmung der Steuersignale Dies ist bei einigen FU‘s zwingend, da andernfalls Fehler wie: • Beeinflussung der Sollwerte • Absturz des Mikroprozessors im FU, d.h. blockieren des FU‘s • Fehlverhalten des FU‘s auftreten können. Richtig ist hier die beidseitige Schirmauflage. Probleme dabei können jedoch entstehen, wenn kein ausreichender Potentialausgleich zwischen Anlagenteilen besteht und somit Störungen und Ausgleichsströme über die geschirmte Steuerleitung (als einzige Verbindung) fließen können. Im Zweifel bzw. bei Problemen hilft kurzfristig dann die einseitige Auflage. FCHinweiseIII.doc Stand 03 / 2009 Seite 11 von 14 Frequenzumrichter: Hinweise für den Anwender 8. Länge der Motorleitungen Die Länge der Motorleitungen sind bei FU‘s zu beachten. Je nach Produkt sind bereits bei Motorleitungslängen größer als 50 m Maßnahmen zu ergreifen, wie z.B.: 9. • Einsatz von Motorleitungsdrosseln oder gegebenenfalls sogar Sinusfiltern (LC-Filter) • Einhaltung einer Leistungsreduzierung, abhängig von der Länge der Motorleitung Vor-Ort Schalter Muss aus Gründen der Sicherheit ein allpolig trennbarer Revisionsschalter (Vor-Ort Schalter) montiert werden, so ist je nach FU Hersteller Folgendes zu beachten: 10. • Bei einigen FU-Herstellern ist das Schalten der Motorleitung (bei drehendem Motor) möglich. • Bei anderen kann das Schalten der Motorleitung (bei drehendem Motor) den FU zerstören. Mehrmotorenbetrieb Mehrmotorenbetrieb (auch Parallelbetrieb genannt) ist der Betrieb von mehr als einen Motor an einem FU. Dabei ist jedoch Folgendes zu beachten: • Keine großen Leistungsunterschiede (max. 1:2), da sonst die Einstellungen am FU nicht mehr für alle Motoren optimal möglich sind (speziell bei niedrigen Drehzahlen). • Schlupfkompensation auf „0“ stellen. • Stromabhängige Kompensationen auf „0“ stellen bzw. ausschalten. • Bei FU‘s mit Möglichkeit zur Flußvektorregelung darf nur der Skalarbetrieb, d.h. nach U/f Kennlinie, eingestellt werden. 10.1 Motorschutz Da der Gesamtstrom der angeschlossenen Motoren im FU programmiert werden muss, ist der einzelne Motor nicht mehr zuverlässig gegen Überlastung geschützt. Es müssen daher zusätzliche Maßnahmen gegen Überhitzung der Motoren getroffen werden. Schutz mit Thermistor (Kaltleiter) Der optimalste Schutz bei Mehrmotorenbetrieb ist der mit einem Thermistor (Kaltleiter). Thermischer Schutz wird damit auch bei niedrigen Drehzahlen geboten. Schutz mit Motorschutzschalter. Jeder Motor wird durch einen Motorschutzschalter oder ein Motorschutzrelais überwacht. Bei Geräten mit Bimetall-Auslösung konnte festgestellt werden, dass der Auslösestrom des Schutzgerätes ca. 5 bis 10% höher als der Motornennstrom eingestellt werden muss, um nicht zu früh auszulösen. Der HFAnteil der Taktfrequenz heizt das Bimetall zusätzlich auf, was eine verfrühte Abschaltung zur Folge hat. Dieser Effekt kann durch folgende Maßnahmen verhindert werden: • Einbau von Drosseln in die Motorleitung bei gleichzeitiger Reduzierung der Taktfrequenz. • Verwendung eines elektronischen Motorschutzes. FCHinweiseIII.doc Stand 03 / 2009 Seite 12 von 14 Frequenzumrichter: Hinweise für den Anwender 10.2 Zu- und Abschalten der verschiedenen Motoren Das Zu- und Abschalten der verschiedenen Motoren ist nicht bei allen FU‘s möglich. • Wenn durch den Anlaufstrom des zugeschalteten Motors das System abkippt, weil z.B. die Frequenz bei Überlastung nicht zurückgenommen wird. Dies ist nur in seltenen Fällen zu erwarten. • 11. Wenn der FU ein Schalten der Motorleitungen nicht zuläßt, d.h. Zerstörung des FU‘s ist möglich. Hinweise 11.1 RCD (Fl – Schutzschalter) Für 3-phasige Frequenzumrichter sind laut EN 50178 (Ausrüstung von Starkstromanlagen mit el. Betriebsmitteln) allstromsensitive FI-Schutzschalter (RCCB, Typ B) zu verwenden. Da der Ableitstrom höher als AC 3,5 mA ist, muss ein Festanschluss vorgesehen werden, sowie der Schutzleiterquerschnitt min. 10 mm2 betragen oder ein zweiter Schutzleiter verlegt werden. 11.2 Hinweise für Wartungspersonal Der über das Netz abgeschaltete FU hat noch einige Zeit (4 bis 45 Minuten) Gleichspannung im Zwischenkreis anliegen. FCHinweiseIII.doc Stand 03 / 2009 Seite 13 von 14 Frequenzumrichter: Hinweise für den Anwender 12. Messungen am FU Für Messungen an Frequenzumrichter sollten nur Messgeräte CAT III 1000V oder besser verwendet werden. Da bei Frequenzumrichter speziell motorseitig keine sinusförmigen Spannungen und Ströme vorkommen, können Messungen mit handelsüblichen Messgeräten sehr problematisch sein. Im Folgenden sind einige Überlegungen zusammengefaßt: • Netzspannung am FU kann mit Multimetern gemessen werden. • Netzströme, die mit normalen Multimetern gemessen werden, führen bereits zu Fehlergebnissen, da die Kurvenform, bedingt durch den Eingangsgleichrichter und den Siebkondensator, verzerrt wird. • Die Motorströme sind, speziell bei höheren Taktfrequenzen, nahezu sinusförmig. Trotzdem ergeben sich zum Teil große Fehlmessungen, da die Instrumente durch die getaktete Motorspannung beeinflußt werden. • Die Motorspannung kann mit Multimetern selten richtig gemessen werden, da dies eine getaktete pulsweitenmodulierte Spannung ist. Zudem ergeben sich durch Reflektion auf den Motorleitungen oder auch durch Schwingvorgänge hohe Überschwinger. Die Spitzenspannungen betragen meist das Doppelte der normalen pulsbreitenmodulierten Spannung. Auch sind die gemessenen Spannungen (mit Oszilloskop) sehr unterschiedlich, je nachdem ob beim Motor oder beim FU gemessen wird. Zusätzlich zu den obigen Überlegungen zeigen sich in der Praxis häufig Messfehler, bedingt durch die HF-Störungen des FU‘s. Es ist deshalb einfacher, die Motorspannungen und -ströme über die Bedienungsanzeige des FU‘s abzulesen, auch wenn die Genauigkeit zu wünschen übrig lässt. Nur für Symmetriemessungen in allen drei Phasen (wenn der gemessene Wert unwesentlich ist) genügen jedoch normale Stromzangen oder Multimeter. FCHinweiseIII.doc Stand 03 / 2009 Seite 14 von 14