1. Elementare Dreiecksgeometrie - TU Wien
Werbung

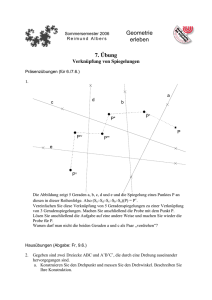
1. Elementare Dreiecksgeometrie Die Menge sA1 B2 der Punkte, die von zwei Punkten A und B gleich weit entfernt sind, bilden die Streckensymmetrale der Punkte A und B. Ist A 6= B, so ist dies eine Gerade. Für drei Punkte A, B, C gibt es die Streckensymmetralen sAB , sBC , sCA . Schneiden einander sAB und sBC , so ist jeder Schnittpunkt gleich weit von A wie von B, sowie gleich weit von B wie von C entfernt. Das heißt, daß auch sAC durch diesen Punkt hindurchgeht. Bilden A, B, C ein Dreieck, so ist der Schnittpunkt der drei Streckensymmetralen von allen drei Eckpunkten gleich weit entfernt. Es gibt genau einen Punkt mit dieser Eigenschaft, den Umkreismittelpunkt des Dreiecks. Analoge Überlegungen kann man für drei Gerade anstelle von drei Punkten durchführen: Sei wab die Menge der Punkte, die von zwei Geraden a, b gleich weit entfernt liegen. Sind a, b nicht parallel, so ist 0 00 wab die Vereinigung wab ∪ wab der zwei Winkelsymmetralen der Geraden a und b. Sind a, b parallel, so Geometrie für den Mathematikunterricht PS ist wab eine Gerade, die Mittenparallele von a und b. Ist a = b, so ist wab die ganze Ebene. Wegen der Transitivität der Gleichheitsrelation ist jeder Schnittpunkt von wab mit wbc auch in wca enthalten. Sind a, b, c die drei Seiten eines Dreiecks, so handelt es sich bei diesen Schnittpunkten offenbar um den Inkreismittelpunkt und die drei Ankreismittelpunkte dieses Dreiecks. Um aus der Existenz des Umkreismittelpunktes eines Dreicks mit Ecken ABC und Seiten a = BC, b = CA, c = AB die Existenz des Höhenschnittpunktes herzuleiten, bedienen wir und eines Dreiecks, dessen Seiten a0 , b0 , c0 durch die Punkte A, B, C gehen, und zu a, b, c parallel sind (in dieser Reihenfolge). Die Ecken des neuen Dreiecks seien mit A0 B 0 C 0 bezeichnet. Offenbar ist eine Höhe des Dreiecks ABC eine Streckensymmetrale von A0 B 0 C 0 und umgekehrt, und der Umkreismittelpunkt von A0 B 0 C 0 ist der Höhenschnittpunkt von ABC. J. Wallner - W. Rath Unterlagen — WS 2004/2005 2. Der Satz des Pythagoras Dieser Satz, der in der Form “a2 + b2 = c2 ” sprichwörtlich geworden ist, trägt den Namen des Pythagoras von Samos (ca. 580–ca. 500 v.Chr.), ist aber sicher nicht von ihm entdeckt worden. In einer geometrischen Sprache können wir ihn so formulieren: Satz 1. (des Pythagoras) In einem rechtwinkeligen Dreieck ist die Summe der Flächeninhalte der Quadrate über den Katheten gleich dem Flächeninhalt des Quadrates über der Hypotenuse. Es gibt sehr viele verschiedene Beweise dafür — der Kuriosität halber sei erwähnt, daß der Beweis von James Garfield (1831–1881) der einzige dem Autor bekannte Beitrag eines Präsidenten der USA zur Mathematik darstellt. Geometrie für den Mathematikunterricht PS In einem geometrischen Kontext zeigen wir die Flächengleichheit auf zwei verschiedene Arten: (i) dadurch, daß sich die zwei Quadrate über den Katheten in endlich viele Teile zerlegen lassen, die man zu dem Quadrat über der Hypotenuse zusammensetzen kann (die Zerlegungsgleichheit der beiden Flächen) und (ii) dadurch, daß man zu beiden Flächen (nachdem man sie passend kongruent verlagert hat) jeweils endlich viele kongruente Teile hinzufügen kann, sodaß das Resultat zwei euklidisch kongruente Flächen sind (die Ergänzungsgleichheit) der beiden Flächen. Eine Zerlegung in fünf Teile und eine Ergänzung durch vier kongruente Dreiecke sind aus den beiden untenstehenden Figuren ersichtlich. J. Wallner - W. Rath Unterlagen — WS 2004/2005 3. Winkelbegriffe in der euklidischen Geometrie Das Messen von Winkeln wird hier aufbauend auf dem Begriff der Bogenlänge am Einheitskreis eingeführt. Auf dessen Präzisierung sei auf die Vorlesungen aus Analysis verwiesen. Hier wird er nur in naiver Weise verwendet. Verwendet man die (−π/2, π/2], so ist 3.1 Der orientierte Winkel von Halbgeraden und Geraden Nicht orientierte Winkel ^( g , h) oder ^(g, h) zwischen Halbgeraden oder Geraden sind von der Reihenfolge der beiden Argumente unabhängig. Verwendet man nichtnegative Winkelmaße, so ist Wir können Kreisen in der euklidischen Ebene eine Durchlaufsinn zuordnen — positiv oder negativ (gegen den oder mit dem Uhrzeigersinn). Gehen von − → − → einem Punkt zwei Halbgeraden g , h aus, so ist der orientierte Winkel (3) − → − → − → Intervalle − → − → − → → − (−π, π] bzw. → − ^( g , h) = −^( g , h), ^(g, h) = −^(g, h). 3.2 Nicht orientierte Winkel − → − → (4) → − → − ^(g, h) = min(^(g, h), ^(h, g)). Ansonsten ist (5) → − ^(g, h) = |^(g, h)|. − → − → − → (1) ^( g , h) definiert als die Bogenlänge desjenigen Kreisbogens, → − → − der von g überstrichen wird, wenn wir g im ma→ − thematisch positiven Sinn nach h drehen. Auch der Drehung wird diese Bogenlänge als Winkel zugeordnet. Orientierte Winkel nehmen damit Werte aus dem Intervall [0, 2π) an. Alternativ kann man auch Winkel mit Werten in (−π, π] betrachten: In diesem Fall dreht man entweder positiv oder negativ, je nachdem, wo die Drehung kürzer ist. Der Winkel bekommt das entsprechende Vorzeichen. Der orientierte Winkel von Geraden g, h ist entsprechend der Winkel der Drehung von g nach h definiert. Solche Winkel sind aus den Intervallen [0, π) oder (−π/2, π/2]. Bei orientierten Winkeln ist die Reihenfolge der Argumente wichtig. Verwendet man nichtnegative Winkelmaße, so ist − → − → − → − → → − → − → − → − (2) ^( g , h) = 2π − ^( h, g ), ^(g, h) = π − ^(h, g). Geometrie für den Mathematikunterricht PS Beide, die orientierten und nicht orientierten Winkel bleiben bei orientierungserhaltenden euklidischen Kongruenztransformationen erhalten, d.h. bei Schiebungen und Drehungen. Die nicht orientierten Winkel bleiben auch bei orientierungsumkehrenden Kongruenztransformationen (z.B. Spiegelungen) erhalten, die orientierten Winkel ändern ihr Vorzeichen (soferne man Werte in den Intervallen (−π, π] und (−π/2, π/2] benützt). 3.3 Die Winkel bzw. Drehungen um einen Punkt als Gruppe Die Drehungen um einen festen Punkt bilden eine Gruppe mit der Hintereinanderausführung der Drehung als Gruppenoperation. Nachdem eine Drehung durch ihren orientierten Winkel eindeutig festgelegt ist und umgekehrt, bilden auch die orientierten Winkel bzw. die Menge [0, 2π) eine Gruppe. Die Gruppenoperation ist die Addition von Winkeln modulo 2π. J. Wallner - W. Rath Unterlagen — WS 2004/2005 4. Winkel im Kreis Wir betrachten einen Kreis k mit Mitte M und drei verschiedene Punkte A, B, P ∈ k. Wir wollen annehmen, daß M und P auf derselben Seite der Geraden AB liegen. Die Dreiecke AM P und BM P sind gleichschenkelig, und deshalb gelten die Winkelgleichheiten (1) α = ^MAP = ^MPA, β = ^MBP = ^MPB . Wegen der Winkelsumme im Dreieck ist (2) ^AMP = π − 2α, ^BMP = π − 2β. Aus (3) ^APB = α + β, Satz 2. (Satz vom Sehnen-Tangenten-Winkel): Der orientierte Winkel zwischen der Kreistangente tA in A und der Geraden AB ist gleich → − ^(tA , AB) = ω/2. ^AMB = 2α + 2β 1 ^AMB 2 Insbesondere ist der Winkel ^APB unabhängig von der Lage des Punktes P . Eine ähnliche Argumentation zeigt für den Fall, daß M und P auf verschiedenen Seiten der Geraden AB liegen, daß 1 (5) π − ^APB = ^AMB 2 gilt. Betrachtet man nicht Winkel der Form AP B, sondern Winkel zwischen Geraden, so erhält man: ^APB = Satz 1. (Peripheriewinkelsatz) Wir nehmen an, daß A, B auf einem Kreis mit Mittelpunkt M liegen. Sei ω der orientierte Winkel den die Strahlen M A und M B einschließen (−π ≤ ω ≤ π). Dann ist der orientierte Winkel (∈ [−π/2, π/2]) zwischen den Geraden AP und BP gleich ω/2. In dem speziellen Fall, daß B gleich dem A gegenüberliegenden Punkt A0 am Kreis ist (d.h. ^AMB = ω = π), erhält man den Satz von Thales: (6) Für die bisher ausgeschlossenen Fälle A = P und B = P könnten wir einen Grenzübergang durchführen und die Geraden AP bzw. BP durch die Kreistangenten in A bzw. B ersetzen. Daß dies tatsächlich möglich ist, besagt (7) folgt (4) Dieses sieht man auch dadurch ein, daß man AP A0 durch Spiegelung an AA0 zu einem Rechteck ergänzt. ^APA0 = π/2. Geometrie für den Mathematikunterricht PS Beweis. Dies folgt sofort aus dem rechten Winkel zwischen tA und AM , sowie aus der Winkelsumme im Dreieck AM B. Es gilt ferner die folgende Umkehrung des Peripheriwinkelsatzes: Satz 3. Es seien Punkte A, B auf einem Kreis mit Mittelpunkt M gegeben, und sei ω der orientierte Winkel zwischen den Strahlen M A und M B (−π ≤ ω ≤ π). Schließen zwei Gerade g durch A und h durch B den orientierten Winkel ω/2 ein, so schneiden sie einander auf dem Kreis. Beweis. Sei P der Restschnittpunkt der Geraden g mit dem Kreis. Im Fall P 6= A, B schließen die Geraden g = AP und BP den orientierten Winkel ω/2 ein, und BP ist gleich der Geraden h. Im Fall P = A ist g die Kreistangente in A. Nach dem Satz vom Sehnen-Tangentenwinkel muß h = AB sein. Im Fall P = B ist g = AB. Nach dem Satz vom Sehnen-Tangentenwinkel muß h die Kreistangente in B sein. J. Wallner - W. Rath Unterlagen — WS 2004/2005 5. Spiegelungen in der euklidischen Ebene Die euklidische Ebene wird durch eine Gerade in zwei Halbebenen geteilt. Eine Gerade g wird durch einen Punkt in zwei Halbgerade (oder Strahlen) geteilt. → − Wir bezeichnen Halbgerade mit dem Symbol g . Die → − Gerade, auf der g liegt, wird dann mit g bezeichnet. Die zu einer Halbebene gehörige Gerade heißt Randgerade, und der zu einer Halbgeraden gehörige Punkt heißt Anfangspunkt. Wir kennzeichnen die Halbgeraden mit Anfangspunkt O durch den orientierten Winkel (modulo 2π) → − zu einer festen Halbgeraden x (‘x-Achse’ mit Winkel 0). Gerade durch O sind ebenfalls durch ihre orientierten Winkel (modulo π) zur x-Achse festgelegt. Wir indizieren Gerade und Halbgerade mit dem → − Winkel, den sie mit x bzw. x einschließen: (1) → − → − → − ^( x, g α ) = α, → − ^(x, gβ ) = β. 5.1 Drehungen um einen festen Punkt Lemma 1. Eine Drehung ρ mit Zentrum O und orientiertem Winkel γ bzw. eine Spiegelung σ an gα transformiert Halbgerade durch O wie folgt: (2) → − → − → − → − → − → − ρ : g φ 7→ g φ+γ , σ : g α−ψ 7→ g α+ψ , g φ 7→ g 2α−φ . Satz 1. Die Zusammensetzung von zwei Spiegelungen σα , σβ mit Achsen gα , gβ ist eine Drehung mit dem Winkel 2(β − α). Beweis. Die Abstände von Punkten von O bleiben bei Spiegelungen erhalten. Es genügt daher, die Bil→ − der von Halbgeraden g φ zu untersuchen: (3) → − → − → − σβ σα ( g φ ) = σβ ( g 2α−φ ) = g 2β−2α+φ Geometrie für den Mathematikunterricht PS 5.2 Schiebungen orthogonal zu einer festen Richtung Etwas Ähnliches können wir für eine Parallelschar von Geraden durchführen. Wir messen den orientierten Abstand einer Geraden der Schar zu einer festen Geraden g0 durch den orientierten Abstand von g0 (d.h. der Abstand ist positiv, wenn die Gerade in einer vorher ausgezeichneten Halbebene mit Rand g0 liegt). Schiebungen orthogonal zu g0 sind durch ihre orientierte Schiebstrecke gekennzeichnet. Lemma 2. Eine Schiebung τ orthogonal zu g0 mit Schiebstrecke c (c ∈ R) bzw. eine Spiegelung σ an der Geraden ga bildet Gerade gx in der Form (4) τa : gx 7→ gx+c , σ : ga−y 7→ ga+y , gx 7→ g2a−x . Satz 2. Die Zusammensetzung von zwei Spiegelungen σa , σb an ga , gb ist die Schiebung mit Schiebstrecke 2(b − a). Beweis. Fixieren wir eine Gerade orthogonal zu g0 , so bleiben orientierte Abstände zu ihr bei Schiebungen und Spiegelungen erhalten. Es genügt daher, die Bilder von Geraden gx zu betrachten: (5) σb σa (gx ) = σb (g2a−x ) = g2b−2a+x . Offenbar gilt von Satz 1 und Satz 2 auch die folgende Umkehrung: Da für beliebig gegebenes γ und α der Winkel β = α + γ/2 die Eigenschaft 2(β − α) = γ besitzt, können wir die Drehung mit Drehwinkel γ zerlegen in die Spiegelung an gα (völlig beliebig) und die Spiegelung an gα+γ/2 . Dasselbe gilt für Schiebungen orthogonal zur Geraden g0 : Wir können die Schiebung τ mit Schiebstrecke c zerlegen in die Spiegelung an ga (beliebig) und ga+c/2 . J. Wallner - W. Rath Unterlagen — WS 2004/2005