Relativistische Mechanik (4)
Werbung
")
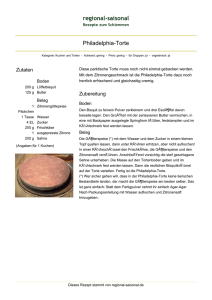
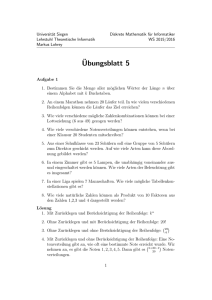
Kapitel 1 Relativistische Mechanik (4) Freitag 25.1.02 Am Ende des 19. Jahrhunderts erforderten neue experimentelle Fakten eine Modifikation der Newton’schen Theorie der Mechanik. Diese führten zu zwei Erweiterungen dieser Theorie, die beide von einander unabhängig sind: • die relativistische Mechanik • die Quantenmechanik Wir wollen im folgenden die relativistische Mechanik besprechen. 1.1 Struktur von Raum und Zeit 1.1.1 Versagen der Galilei-Transformation Wie wir in Abschnitt ?? gesehen haben, war Newton von einem absoluten Raum und einer absoluten Zeit ausgegangen. Er hatte ein Existenz von Inertialsystemen gefordert, in denen die Bewegungsgleichung eines kräftefreien Massenpunkts lautet: mr̈ = 0. (1.1) Daraus ergibt sich, wie wir in Abschnitt ?? sahen, die Galilei-Invarianz, d.h. alle Systeme, die sich mit gleichförmiger Geschwindigkeit v gegenüber einem Inertialsystem bewegen, sind wieder Inertialsysteme Die Transformation vom ruhenden System K mit den Koordinaten r = (x, y, z) in das bewegte System mit den Koordinaten r0 = (x0 , y 0 , z 0 ) wird durch die Galilei-Transformation beschrieben: r0 = r − vt. (1.2) Aus diesem Transformationsgesetz ergibt sich durch Differentiation nach der Zeit das Galilei’sche Geschwindigkeits-Additionstheorem: ṙ = ṙ0 + v. 143 (1.3) Abbildung 1.1: Transformation in bei gleichförmig bewegtes Bezugsystem. Daraus folgt, dass die Lichtgeschwindigkeit sich beim Übergang in ein bewegtes System ändern müsste. Der Michelson-Versuch zeigt jedoch, dass dies nicht der Fall ist: Die Lichtgeschwindigkeit ist in allen Systemen gleich, nämlich c. Einstein schloss daraus, dass die Galilei-Transformation nicht richtig sein kann. Da sie sich jedoch als eine unmittelbare Konsequenz der Newton’schen Strukturen von Raum und Zeit ergibt, sah er in seiner speziellen Relativitätstheorie aus dem Jahre 1905 stammenden Arbeit über die spezielle Relativitätstheorie dazu gezwungen, daraus den kühhen Schluss zu ziehen, dass man neue Begriffe von Raum und Zeit benötigt um das Michelson-Experiment zu verstehen. 1.1.2 Räumliche Ordnung Einstein gab den Begriff des absoluten Raumes und der absoluten Zeit auf. Der Raum ist für ihn nur definiert durch die Gegenstände, die sich in im befinden. Sie teilen das Raumgebiet in Teilgebiete auf. Man kann feststellen, ob sich Körper im Raum berühren, d.h. ob sich Raumgebiete berühren. Das entscheidende für die Beschreibung des Raumes sind die Berührungseigenschaften der Körper, die sich in ihm befinden. Andere Eigenschaften, wesentlich oder zufällige, werden dabei ausser acht gelassen. Die Beschreibung dieser Berührungseigenschaften erlaubt es, den Raum quantitativ zu ordnen. Der leere Raum an sich ist nicht definiert, da man über ihn keine physikalischen Aussagen machen kann. Für die Physik relevante Aussagen müssen durch Experimente abgestützt sein. Der Raum ist also eine Ordnung der physikalischen Phänomene unter dem Gesichtspunkt der Berührungseigenschaften. Um die Eigenschaften des Raumes zu untersuchen, in dem wir uns befinden, legen wir zunächst Körper, z.B. deformierbare Plastikstückchen, die sich ganz berühren und keine freien Zwischenräume offen lassen, wie die Stücke eines Puzzles an einander. Auf einer Fläche finden wir dann, dass es immer Stellen gibt, wo sich drei dieser flächenartigen Körper berühren. Im Raum finden wir aber darüber hinaus, dass es immer Stellen gibt, wo sich vier Stücke berühren. Diese Eigenschaft ist ein experimentelles Faktum. Es bedeuted, dass unser Raum drei-dimensional ist. Dies ist eine topologische Eigenschaft und sagt noch nichts über eine Metrik aus. Im Prinzip könnte der Raum gekrümmt sein. Der nächste Schritt ist eine Abstandsmessung, d.h. die Topologie wird durch eine Metrik ergänzt. Um eine solche Metrik einzuführen, wählen wir eine Anzahl von gleichen Körpern, wie z.B. Ziegelsteine, 144 Abbildung 1.2: Der Satz von Pythagoras die durch Pressen in derselben Form entstanden sind, und legen sie in einer Kette aneinander. Man verbindet nun zwei Gegenstände im Raum, die sich nicht berühren, durch eine solche Kette mit möglichst wenigen Gliedern. Die Zahl der Glieder, die mindestens nötig ist, um vom Gegenstand A zum Gegenstand B zu kommen, bezeichnen wir als den Abstand d(A, B) zwischen den Gegenständen A und B. Dieser Abstand d ist zunächst nur bis auf einen Faktor bestimmt. Die Skala ist die Grösse der Kettenglieder. Man kann d absolut dadurch festlegen, dass man den Abstand zweier fester Stellen (z.B. die beiden Enden eines Urmeters A1 und B1 ) mit d(A1 , B1 ) = 1 wählt. Weitere Experimente diese Art erlauben uns, etwas über die Struktur der Abstandsbeziehungen zu lernen. Wir können z.B. in Fig. 1.2 von zwei Punkten A und B ausgehen und durch Abmessen mittels obiger Ketten einen Punkt D in der Mitte zwischen A und B dadurch festlegen, dass wir verlangen, dass er den kürzesten gleichen Abstand zu A und B hat. Sodann suchen wir von D ausgehend eine Punkt C, so dass d(A, D) = d(A, C) = d(B, C). Wenn wir dann die Abstände d(A, C) = d(C, B) = d(A, B) vergleichen, so finden wir mit hoher Genäuigkeit den Satz von Pythagoras: d(A, C)2 + d(B, C)2 = d(A, B)2 . (1.4) Einen solchen Raum nennen wir euklidisch. Im unserem alltäglichen Bereich stellen wir fest, dass der Raum drei-dimensional euklidisch ist. Erst bei astronomischen Grössenordnungen begegnen wir Abweichungen von der Euklidischen Geometrie. Anschaulich können wir uns nur eine Euklidische Geometrie vorstellen, an die wir von Kindheitstagen her gewöhnt sind. 1.1.3 Zeitliche Ordnung Die Welt lässt sich nicht allein in der Struktur des Raumes erfassen. Sie ist nicht starr und unveränderlich. Es gibt eine zeitliche Ordnung. Nach Newton läuft die Zeit absolut und gleichmässig, d.h. sie existiert auch unabhängig von den tatsächlichen Ereignissen. Nach Einstein ist sie aber nur Ordnungsform. Ohne die Veränderung der Beziehungen der Gegenstände hat sie keinen physikalischen Sinn. Um die Zeit zu messen, benötigen wir eine Uhr, d.h. einen sich periodisch wiederholenden Vorgang, wie z.B. ein Pendel, bei dem wir die Zahl der Schwingungen messen können. Die Zeitmessung hängt dann von dem betrachteten periodischen Vorgang ab, kann aber in geeigneter Weise skaliert werden. 145 Abbildung 1.3: Die Aufteilung des Raum-Zeit-Gebietes in Vergangenheit, Gegenwart und Zukunft bezüglich eines Ereignisses a Wir betrachten nun eine solche Uhr an den Wänden unseres Hörsaales und bewegen eine Körper, z.B. ein Kreidestück, durch den Hörsaal. Jedesmal, wenn der Zeiger der Uhr eine volle Schwingung, z.B. eine Sekunde, anzeigt, bestimmen wir die räumliche Lage des Körpers in Bezug auf die Wände des Hörsaales. Eine bestimmte räumliche Lage in Verbindung mit einer bestimmten Zeigerstellung der Uhr nennen wir ein Ereignis. Es ist durch vier Zahlen festgelegt, drei Ortskoordinaten und eine Zeitkoordinate. Die Ereignisse sind vier-dimensional geordnet. 1.1.4 Der vier-dimensionale Ereignisraum Diese vier-dimensionale Raum-Zeit-Bereich unterscheidet sich von einem gewöhnlichen vier-dimensionalen Ortsraum durch den Unterschied zwischen räumlichem Nebeneinander und zeitlichem Nacheinander. Bei zwei Ergeignissen a und b kann man sich folgende gleichwertige Fragen stellen: • Kann ein von a ausgehender physikalischer realer Vorgang b erreichen? • Gibt es einen Gegenstand, der am Ereignis a teilgenommen hat, und der am Ereignis b teilnimmt? • Gibt es eine Kette von Ereignissen ein und desselben Körpers die von a nach b reicht? Wir nennen zwei Ereignisse a und b, die durch eine derartige Kette verbunden werden können zeitartig, solche für die das nicht gilt raumartig. Nur zeitartige Ereignisse können in einen kausalen Zusammenhang gebracht werden. Die Zeit zeichnet darüber hinaus eine Richtung aus: Alle Ereignisse, die zeitartig zu a liegen und die auf a einen Einfluss nehmen können, bezeichnen wir in Bezug auf das Ergeignis a als die Vergangenheit von a, alle Ergeignisse, auf die vom Ergeignis a aus beeinflusst werden können, nennen wir die Zukunft a und alle Ereignisse, die raumartig zu a liegen, nennen wir die Gegenwart von a. 146 Abbildung 1.4: Synchronisation von Uhren in den Punkten A und B Falls es eine maximale Geschwindigkeit c gibt, und falls wir es mit einem euklidischen Raum zu tun haben, wird das vier-dimensionale Raum-Zeit-Gebiet durch einen drei-dimensionalen Kegel, dessen Ursprung mit dem Ereignis a zusammenfällt in Vergangenheit, Gegenwart und Zukunft bezüglich dieses Ereignisses aufgeteilt (siehe Fig. 1.3). Vergangenheit und Zukunft stössen im Ergeignis a zusammen. 1.1.5 Invarianz des raum-zeitlichen Abstandes Um die raum-zeitlichen Koordinaten festzulegen müssen wir Messungen durchführen. Bezüglich der zeitlichen Messungen haben wir bisher nur eine feste Uhr in unserem Hörsaal betrachtet und angenommen, dass sich dadurch Zeitkoordinaten für alle Ereignisse in diesem Hörsaal festlegen lassen. Wir müssen jetzt aber etwas preziser sein: Eigenlich können wir mit grosser Genauigkeit nur die Zeit auf einer Uhr ablesen, die sich am Ort des betrachteten Körpers befindet, da die Ablesung durch Übertragung von Licht vorgenommen wird, das sich mit endlicher Geschwindigkeit ausbreitet. Die Zeit die wir auf der Uhr ablesen, die sich mit dem Körper bewegt, nennen wir die Eigenzeit des Körpers. Sie ist ein quantitatives Mass für den zeitlichen Abstand von Ereignissen an demselben Körper. Als nächstes wollen wir den zeitlichen Abstand von beliebigen Ereignissen messen. In einem zeitlich nicht veränderlichen System, z.B. in unserem Hörsaal, am Fixsternhimmel, im Inneren einen Eisenbahnabteils, kann man in folgender Weise eine eigene Zeit einführen (siehe Fig. 1.4): • Man stellt an allen zeitlich festen Punkten A, B des Systems identisch gebaute Uhren auf. • Man eicht sie in gleicher Weise durch Lichtsignale, die von einem zeitlich festen Punkt C in der Mitte zwischen A und B ausgehen so, dass die beiden Uhren in A und B synchron laufen. So kann man in jedem stabilen Raum alle Uhren synchronisieren und dadurch eine einzige diesem System zugeordnete Zeit einführen. Nun betrachten wir die Zeit in einem bewegten System. Dazu gehen wir wieder von dem oben definierten Höhrsaalsystem mit den Punkten festen Punkten A und B aus und betrachten einen Gegenstand G, der sich mit konstanter Geschwindigkeit geradlinig von A nach B bewegt. Auch auf diesem bewegten Gegenstand installieren wir eine Uhr. Nun definieren wir zwei Ereignisse: das Ereignis a, bei dem der Gegenstand G am Orte A ist und das Ereignis b bei dem der Gegenstand G 147 am Orte B ist. Die zugehörigen Zeiten lesen wir auf den entsprechenden Uhren ab, und zwar: ta : Zeit der Uhr in A, wenn G bei A ist tb : Zeit der Uhr in B, wenn G bei B ist t0a : Zeit der Uhr in G, wenn G bei A ist t0b : Zeit der Uhr in G, wenn G bei B ist Auf der im Zimmer gemessenen Uhr ist also zwischen den beiden Ereignissen die Zeit (die Zimmerzeit) ∆t = tb − ta (1.5) vergangen und auf der mit dem Gegenstand G mitbewegten Uhr die Zeit (Eigenzeit von G) ∆t0 = t0b − t0a . (1.6) Bei genauer Messung ergibt sich folgender experimenteller Befund: Die beiden Zeitdifferenzen sind verschieden und zwar gilt 1 2 d (A, B) (1.7) c2 wobei c eine universelle Konstante mit der Dimension einer Geschwindigkeit ist, deren Wert numerisch (∆t0 )2 = (∆t)2 − identisch gleich der Lichtgeschwindigkeit im Vakuum ist In dem obigen Fall sind die beiden Ergeignisse a und b nicht vollkommen beliebig, sondern dadurch eingeschränkt, dass sie im bewegenten System am selben Ort, d.h. am Gegenstand G, stattfinden. Wir wollen nun noch einen etwas allgemeineren Fall untersuchen, bei dem die beiden Ereignisse auch im bewegten System an verschiedenen Orten stattfinden. Dazu betrachten wir einen Zug mit dem Zuganfang P und dem Zugende Q, der an den beiden festen Punkten A und B auf der Erde mit konstanter Geschwindigkeit vorbeifährt. Wir haben also zwei Systeme, die Erde und den Zug, die sich gegen einander mit konstanter Geschwindigkeit bewegen. Nun betrachten wir folgende Ereignisse Ereignis a : die Spitze des Zuges P befindet sich in A Ereignis b : das Ende des Zuges Q befindet sich in B Der räumliche Abstand der beiden Ereignisse ist im nicht bewegten System (auf der Erde): im bewegten System (im Zug) ∆x = d(A, B) ∆x0 = d(P, Q) Der zeitliche Abstand der beiden Ereignisse ist im nicht bewegten System: im bewegten System ∆t gemessen auf Uhren auf der Erde ∆t0 gemessen auf Uhren im Zug 148 Eine genaue Messung liefert nun folgenden experimentellen Zusammenhang: c2 (∆t)2 − (∆x)2 = c2 (∆t0 )2 − (∆x0 )2 . (1.8) Systeme, in denen diese Relation exakt gilt, wollen wir Inertialsysteme nennen. Ein Beispiel ist der Fixstern-Himmel. Wir definieren nun in der vier-dimensionalen Raum-Zeit folgenden raum-zeitlichen Abstand: ∆s2 := c2 ∆t2 − ∆r2 (1.9) und stellen auf Grund des obigen experimentellen Resultats fest, dass ∆s2 in allen Inertialsystemen gleich ist, und dass sich dieser raum-zeitliche Abstand bei dem Übergang in ein bewegtes System nicht ändert. Insbesondere unterscheiden wir zwei Ergeignisse mit zeitartigem Abstand: raumartigem Abstand: falls ∆s2 > 0, falls ∆s2 < 0, In der Allgemeinen Relativitäts-Theorie ging Einstein noch einen Schritt weiter. Auch hier ist die Welt ein vier-dimensionaler Bereich. Es wird aber eine koordinatenabhängige Metrik definiert, d.h. zwischen zwei Ereignissen a und a0 , die infinitesimal benachbart sind, und die die Koordinaten (x0 = ct, x1 , x2 , x3 ) und (x00 = ct0 , x01 , x02 , x03 ) mit (x0i = xi +dxi )i=0...3 besitzen, ist ein raum-zeitlicher Abstand definiert durch ds2 = 3 X gik dxi dxk , (1.10) i,k=0 der unabhängig ist vom benutzten Koordinatensystem. Im Gegensatz zur speziellen Relativitätstheorie können die Koeffizienten gik jedoch von den Koordinaten (x0 , x1 , x2 , x3 ) abhängen. Lokal, d.h. in einer Umgebung eine Raum-Zeitpunktes, in der gik näherungsweise konstant ist, wie zum Beispiel in der Umgebung der Erde, kann man gik diagonalisieren und geeignete Skalen einführen, so dass lokal eine pseudo-euklidische Metrik vorliegt: ds2 = dx20 − dx21 − dx22 − dx23 . (1.11) Global ist das aber imm allgemeinen nicht möglich, d.h. es gibt aber im allgmeinen kein Koordinatensystem, in dem dies überall gilt. Dann nennt man diese Metrik nicht-euklidisch. Die Elemente des metrischen Tensors gik werden in der Allgemeinen Relativitätstheorie aus der Massenverteilung im Weltraum berechnet. Damit stellt diese Theorie im eigentlichen eine Theorie der Graviation dar, ist also im Grunde spezieller als die spezielle Relativitätstheorie, die natürlich für alle Wechselwirkungen gelten muss, nicht nur für die Gravitationswechselwirkung. Im folgenden wollen wir uns nur mit der speziellen Relativitätstheorie beschäftigen und uns auf eine im ganzen Raum (global) gültige pseudo-euklidische Metrik (1.11) beschränken. Montag 18.1.2002 149 1.2 Die Lorentz-Transformation Wir haben an Anfang des letzten Abschnittes gesehen, dass die Galilei-Transformation (1.2) bei genauer Messung bei einem Übergang zu einem gleichförmig bewegten System die Natur nicht richtig beschreibt. Um mit den Experimenten in Einklang zu sein, müssen wir also die Galilei-Transformation durch eine andere Transformation ersetzen. Einstein forderte, dass die Transformation so beschaffen sein muss, dass der raum-zeitliche Abstand zwischen zwei beliebigen Ergeignissen durch diese Transformation nicht verändert wird. Eigentlich verlangt das Michelson-Experiment nur, dass die Lichtgeschwindigkeit invariant ist, d.h. dass zwei Ereignisse, deren raum-zeitlicher Abstand ∆s2 verschwindet auch im bewegten System einen verschwindenden raum-zeitlichen Abstand besitzten. Einstein ging aber einen Schritt weiter und verlangte die Invarianz des raum-zeitlichen Abstandes für beliebige Ereignisse. Die Konsequenzen dieser Hypothese mussten dann natürlich erst im Experiment verifiziert werden. Tatsächlich hat man bis heute keine Verletzung dieser Annahme gefunden. Wir wollen also im folgenden wie Einstein von der Invarianz des raum-zeitlichen Abstands ausgehen. Für die folgenden Betrachtungen führen wir im vier-dimensionalen Ereignisraum die folgenden Koordinaten ein (x) = (xµ ) = (x0 , x1 , x2 , x3 ) = (ct, x, y, z) = (xt, r). (1.12) Griechische Indizes (µ, ν, . . .) beziehen sich dabei auf alle vier Koordinaten. Wenn wir uns auf die drei räumlichen Koordinaten beschränken wollen, benutzen wir lateinische Indizes (i, j, k, . . .). Das pseudo-euklidische vier-dimensonale Linienelement (1.11) lässt sich dann mit Hilfe des metrischen Tensors 1 0 0 0 0 −1 0 0 0 0 −1 0 0 0 0 −1 (1.13) gµν dxµ dxν = gµν dxµ dxν = dxµ dxµ . (1.14) gµν = g µν = in folgender Form darstellen ds2 = c2 dt2 − dx2 − dy 2 − dz 2 = 3 X µν=0 Dabei haben wir die Einstein’sche Summenkonvention benutzt, die besagt, dass über gleiche, einmal unten und einmal oben stehende, Indizes summiert werden soll, und mit Hilfe des metrischen Tensors unten indizierte Koordinaten xµ eingeführt: xµ := gµν xν , xµ = g µν xν . (1.15) Wie wir sehen werden, verhalten sie sich bei Lorentztransformationen kontragredient zu den Koordinaten xµ . Wir bezeichnen deshalb die Koordinaten xµ als kogredient und die Koordinaten xµ als kontragredient. Ferner führen wir die Ableitungen nach den vier-dimensionalen Koordinaten ein: ∂µ = ∂ . ∂xµ 150 (1.16) Wie wir sehen werden, transformieren sie sich kogredient zu den Koordinaten xµ . Deshalb benutzen wir für sie einen unteren Index. Mit Hilfe des metischen Tensors lassen sich in Analogie zu Gl. (1.15) jedoch die vier-dimensionalen Indizes leicht hinauf- und hinunterschieben und wir finden dann ∂µ = ∂ . ∂xµ (1.17) Nach diesen Bemerkungen zur Notation wollen wir nun die Eigenschaften von Koordinatentransformationen xµ =⇒ x0 µ = f µ (x) = f µ (x0 , x1 , x2 , x3 ), (1.18) die das Linienelement (1.14) invariant lassen, untersuchen. Wir fordern also ds0 2 = dx0 µ dx0 µ = ds2 = dxµ dxµ (1.19) und finden mit Hilfe der Kettenregel dx0 µ dx0 µ = ∂α fµ dxα ∂β f µ dxβ = (∂α fµ ∂β f µ ) dxα dxβ = dxα dxα (1.20) die Bedingung ∂α fµ ∂β f µ = gαβ . (1.21) Durch Anwendung des Operators ∂γ auf diese Gleichung und nach zyklischer Vertauschung der Indizes α, β und γ ergibt sich daraus ∂β f µ ∂γ ∂α fµ + ∂α f µ ∂γ ∂β fµ = 0, (1.22) ∂γ f µ ∂α ∂β fµ + ∂β f µ ∂α ∂γ fµ = 0, (1.23) ∂α f µ ∂β ∂γ fµ + ∂γ f µ ∂β ∂α fµ = 0. (1.24) Durch Summation von Gl. (1.23) und (1.24) und Subtraktion von Gl. (1.22) folgt (∂α ∂β f µ ) (∂γ fµ ) = 0. (1.25) Wir nehmen nun an, dass die Transformation (1.18) nicht singulär ist, d.h. dass die Dimension des Raumes erhalten bleibt und daher die Funktionaldeterminante det(∂γ fµ ) dieser Transformations nicht verschwindet. Dann lässt sich diese Matrix invertieren und wir erhalten durch Multiplikation mit ihrer Inversen von rechts (∂α ∂β f µ ) = 0. (1.26) Daraus folgt, dass f µ lineare Funktionen der Koordinaten xµ sind. Die allgemeinste Form einer nicht-singulären Transformation, die das vier-dimensionale Linienelement invariant lässt, ist also xµ =⇒ x0 µ = Λµν xν + aµ . Λ ist dabei eine vier-dimensionale Matrix. µ ist ihr Zeilenindex und ν ist ihr Spaltenindex. 151 (1.27) Nicht alle linearen Transformationen kommen dabei in Frage, sondern nur solche, die die Metrik (1.14) invariant lassen. In Analogie zur Definition von orthogonalen Transformationen in einem euklidischen Raum erhalten wir unter Berücksichtigung der Summenkonvention daraus folgende Bedingungen für die Matrix Λ: 0 0 Λµµ gµ0 ν 0 Λνν = gµν , (1.28) ΛT g Λ = g (1.29) oder in Kurzschreibweise Dies sind 10 Bedingungen. Von den 16 reellen Matrixelementen der Matrix Λ sind also nur 6 unabhängig. Λ entspricht also einer vier-dimensionalen Pseudo-Rotation, die die Metrix gµν invariant lässt. Für µ = ν = 0 erhalten wir also folgende Bedingung (Λ00 )2 − X (Λ0i )2 = 1 (1.30) i Λ00 ist also entweder > +1 oder < −1. Für die Determinante erhalten wir det Λ = ± 1 1.2.1 (1.31) Die inhomogene Lorentz-Transformation Die inhomogene Lorentz-Transformation x0 = Λx + a setzt sich also zusammen aus einer vier-dimensionalen Translation mit den 4 Parametern aµ und einer vier-dimensionalen Pseudo-Rotation Λ mit 6 Parametern. Zusammen stellt die Menge aller allgemeinen Lorentz-Transformationen eine Gruppe mit 4+6=10 Parametern dar. 1.2.2 Die spezielle Lorantz-Transformation Bei Vernachlässigung der Translationen aµ = 0 spricht man von einer homogenen Lorentz-Transformation. Auch diese Transformationen bilden eine Gruppe, die sog. homogene Lorentz-Gruppe mit 6 Parametern. Sie enthält diskrete Elemente, die sich nicht in kontinuierlicher Weise in die Identität überführen lassen, wie die Zeitspiegelung T : (x0 , x1 , x2 , x3 ) =⇒ (−x0 , x1 , x2 , x3 ), (1.32) oder die Raumspiegelung (Paritäts-Transformation) P : (x0 , x1 , x2 , x3 ) =⇒ (x0 , −x1 , −x2 , −x3 ), (1.33) Für beide gilt det Λ = −1. Wir bezeichen eine homogene Lorentztransformation als orthochron, falls Λ00 > 0, andernfalls als nicht orthochron, als eigentlich, falls det Λ = +1 und als uneigentlich, falls det Λ = −1. Wir können also folgende vier Typen von homogenen Lorentz-Transformationen unterscheiden: 152 Λ↑+ Λ↓+ Λ↑− Λ↓− mit mit mit mit det Λ = +1 det Λ = +1 det Λ = −1 det Λ = −1 Λ00 Λ00 Λ00 Λ00 und und und und >0 <0 >0 < 0 wie wie wie wie z.B. z.B. z.B. z.B. die die die die Identität I. Transformation TP Paritätstransformation P Zeitspiegelung T Die Elemente I, T P, T, P bilden eine diskrete Untergruppe der speziellen Lorentzgruppe, die sog. Klein’sche Vierergruppe. Die eigentlichen, orthochronen, speziellen Lorentz-Transformationen Λ↑+ bilden eine einfach zusammenhängende Gruppe. Beispiele für Elemente dieser Gruppe sind die Rotationen im drei-dimensionalen Raum Ã Λ = 1 0 0 R ! , (1.34) wobei R eine drei-dimensionale Rotation um die drei Eulerwinkel darstellt (siehe Gleichung (??)). Ein Beispiel ist die Rotation um die z-Achse um den Winkel α Λ = 1 0 0 0 0 cos α sin α 0 0 − sin α cos α 0 0 0 0 1 (1.35) Die restlichen 3 Parameter werden durch die speziellen Lorentz-Transformationen abgedeckt. Dies sind verallgemeinerte Rotationen, die Raum- und Zeitkoordinaten mischen, bei denen die Nebenbedingung (1.30 durch hyperbolische Funktionen erfüllen wird. Ein Beispiel ist die Transformation Λ = cosh η − sinh η − sinh η cosh η 0 0 0 0 0 0 1 0 0 0 0 1 , (1.36) die sich als Drehung um einen komplexen Winkel iη interpretieren lässt. Um die physikalische Bedeutung dieser Transformation zu verstehen, schreiben wir sie explizit x0 = cosh η x − sinh η ct, (1.37) ct0 = cosh η ct − sinh η x. (1.38) Mit den Grössen β = tanh η, γ = cosh η = p 1 1 − β2 und v = βc (1.39) ergibt sich daraus die spezielle Lorentztransformation x0 = 1 q 1− t 0 = v2 c2 q 1 1− v2 c2 153 (x − vt) , µ (1.40) ¶ vx t − 2 . c (1.41) Der Punkt mit der Koordinate x = vt im ursprünglichen System geht dabei über in den Ursprung x0 = 0 des transformierten Systems. Es handelt sich also um eine Transformation in ein mit der Geschwindigkeit v = βc längs der x-Achse bewegtes System, ein Boost in x-Richtung. Den zu der Geschwindigkeit v gehörigen Parameter η bezeichnet man als Rapidität. Bei relativistischen Rechnungen stellt es sich als sehr vorteilhaft heraus, mit die Rapiditäten anstelle der Geschwindigkeiten zu benutzen. Natürlich können wir auch einen Boost in y-Richtung oder in z-Richtung durchführen. Damit erhalten wir die restlichen drei Parameter der homogenen Lorentzgruppe. Die allgemeinste Transformation der Gruppe Λ↑0 ist also eine Kombination von Drehungen im drei-dimensionalen Raum und BoostOperationen in beliebige Richtungen. Im Limes kleiner Geschwindigkeiten (v ¿ c) geht die spezielle Lorentz-Transformation in die GalileiTransformation über. Für diesen Grenzfall ist also die relativistische Theorie in Übereinstimmung mit der Newton’schen Theorie. Abweichungen treten erst bei Geschwindigkeiten auf, die vergleichbar mit der Lichtgeschwindigkeit werden. Im Gegensatz zu den Galilei-Transformationen, bei denen die Zeit nicht transformiert wird und dadurch eine Sonderrolle spielt, stellen die Lorentz-Transformationen im vier-dimensionalen Ereignisraum Transformationen mit wesentlich höherere Symmetrie dar. Dabei wird freilich der Charakter der absoluten Zeit aufgegeben. In völliger Analogie zu den Überlegungen zur Rotationsgruppe im Abschnitt ?? können wir die infinitesimalen Generatoren von Lorentztransformationen einführen. Neben den Generatoren für die Rotationen J1 = 0 0 0 0 0 0 0 0 0 0 0 0 0 −i i 0 , J2 = 0 0 0 0 0 0 0 −i 0 0 0 0 0 i 0 0 , J3 = 0 0 0 0 0 0 0 0 −i 0 i 0 0 0 0 0 0 0 0 i 0 0 0 0 , (1.42) ergeben sich die Generatoren für die Boost-Operationen K1 = 0 i 0 0 i 0 0 0 0 0 0 0 0 0 0 0 , K2 = 0 0 i 0 0 0 0 0 i 0 0 0 0 0 0 0 , K3 = 0 0 0 0 i 0 0 0 , (1.43) mit den Kommutator-Relationen [J1 , J2 ] = iJ3 , (1.44) [J1 , K1 ] = 0, (1.45) [J1 , K2 ] = iK3 , (1.46) [K1 , J2 ] = iK3 , (1.47) [K1 , K2 ] = −iJ3 (1.48) Dies sind die Kommutatorrelationen der nicht kompakten Gruppe SO(1,3). Die Gruppe Λ↑+ entspricht also der Gruppe SO(1,3). Ein beliebiges Element dieser Gruppe lässt sich also durch folgende 154 Exponentialfunktion darstellen: Λ = eiη K eiϕJ . (1.49) mit den sechs Parametern η1 , η2 , η3 , ϕ1 , ϕ2 , ϕ3 . Die speziellen Lorentz-Transformationen haben eine Reihe von unerwarteten, uns eigentlich nicht vorstellbaren, Konsequenzen. Bei ihrer Herleitung können wir uns nicht auf unsere Intuition verlassen, sondern müssen uns streng an die mathematischen Transformationsgesetze halten. 1.2.3 Die Relativierung der Gleichzeitigkeit Freitag 1.2.2002 Wir haben gesehen, dass wir in einem Inertialsystem durch geeignete Synchronisierung von Uhren Gleichzeitigkeit an zwei verschiedenen Orten A und B definieren können. Von einem bewegten System aus gesehen sind allerdings zwei im ruhenden System gleichzeitige Ereignisse nicht mehr gleichzeitig. Der Begriff der Gleichzeitigkeit wird dardurch relativiert. Er hängt vom Bezugsystem ab. Um dies einzusehen, betrachten wir zwei Punkte A und B mit den Koordinaten xA = −x und xB = x im ruhenden System. Zwei Ereignisse a und b an den Punkten A und B seien in diesem System gleichzeitig. Es gilt also xa = − x, ta = 0, xb = x, tb = 0. (1.50) Im einem mit der Geschwindigkeit v gewegten System ergibt sich daraus mittels der speziellen LorentzTransformation (1.41): µ t0a ¶ µ vx =γ 0+ 2 , c t0b ¶ vx =γ 0− 2 , c (1.51) also eine Zeitdifferenz von 2vx c2 Im bewegten System sind beide Ereignisse also nicht mehr gleichzeitig. ∆t0 = t0a − t0b = γ 1.2.4 (1.52) Die Längenkontraktion Ein Stab bewege sich mit der Geschwindigkeit v. Er habe in seinem Ruhsystem (K0 ) die Länge l0 . Wir messen die Länge des Stabes nun im ruhenden System (K). Der Messprozess bestimmt den räumlichen Abstand zweier Ereignisse a und b, die im ruhenden System gleichzeitig sind. Dabei ist das Ergeignis a dadurch bestimmt, dass das eine Ende des Stabes zur Zeit ta = 0 im Ursprung des ruhenden Systems ist xa = 0. Das Ergeignis b findet am andere Ende des Stabes zur gleichen Zeit im ruhenden System statt. Die Raumkoordinate ist festgelegt durch die bei der Messung im ruhenden System festgestellte Länge des Stabes l. Es gilt also tb = 0 und xb = l. Mit Hilfe der Lorentz-Transformation (1.41) ergibt sich im bewegten System: x0a = 0, x0b = γl (1.53) Die Länge im bewegten System, d.h. die Ruhelänge des Stabes, ist also l0 = x0b − x0a = γl 155 (1.54) und wir beobachten also im ruhenden System die Länge s l0 v2 = l0 1 − 2 l = /γ c q Der Stab erscheint also um den Faktor 1.2.5 1− v2 c2 (1.55) kontrahiert. Die Zeitdilatation Um die Zeitdilatiation abzuleiten, betrachten wir zwei Ereignisse a und b, die im bewegten System am gleichen Ort x0a = x0b = 0 zu den Zeiten t0a = 0 und t0b = ∆t0 stattfinden. Im ruhenden System des Beobachters ergibt sich daraus durch Inversion der Gleichung (1.41) µ ¶ vx0a = 0, c2 µ ¶ vx0b 0 = γ tb + 2 = γ∆t0 c ta = γ t0a + (1.56) tb (1.57) Die im ruhenden System gemessene Zeitdifferenz der beiden Ereignisse ist also ∆t ∆t = ta − tb = γ∆t0 = q v2 c2 1− . (1.58) Sie ist als grösser als die im mitbewegten System gemessene Zeitdifferenz. Im bewegten System läuft die Zeit also langsamer ab. Ein mit beinahe Lichtgeschwindigkeit fahrender Astronaut altert also weniger als sein auf der Erde zurückgebliebender Kollege. Ein experimentelles Beispiel für diese Tatsache sind µ-Mesonen, die durch die kosmische Strahlung in den oberen Schichten der Atmosphäre gebildet werden. Auf Grund ihrer kurzen Lebensdauer sollten sie an der Erdoberfläche bereits weitgehend zerfallen sein. Dass dies nicht der Fall ist, und sie also, von der Erde aus gesehen, länger leben als in ihrem eigen Ruhsystem, lässt sich mit Hilfe der Zeitdilatation erklären. 1.2.6 Die Geschwindigkeitsaddition Wie wir am Anfang dieses Kapitels gesehen haben kann das Galilei’sche Geschwindigkeitsadditionstheorem nicht exakt gelten. Der Michelson-Versuch widerlegt es. Wir wollen und daher nun überlegen, wie sich im Rahmen der Relativitätstheorie Geschwindigkeiten addieren. Dazu betrachten wir ein sich gegenüber dem Ruhesystem mit der Geschwindigkeit v1 bewegenden System (K’). In diesem System bewege sich ein Teilchen mit der Geschwindigkeit v2 . Da sich das System (K’) gegenüber dem ruhenden System (K) bewegt erhalten wir für die Geschwindigkeit des Teilchens im System (K) die relativistische Summe v der beiden Geschwindigkeiten v1 und v2 , d.h. bei Verwendung der inversen Lorentz-Transformation (1.57) 0 v = dx dx d(γ(x0 + v1 t0 )) dt0 + v1 = = 0 . 0 v x dt 1 + vc21 dx d(γ(t0 + c12 )) dt0 156 (1.59) Wenn wir weiterhin berücksichtigen, dass v2 = dx0 /dt0 die Geschwindigkeit des Teilchens im bewegten System ist, erhalten wir folgendes Geschwindigkeits-Additionstheorem v = v1 + v2 1 + v1c2v2 (1.60) Dieses Theorem lässt sich in sehr eleganter Weise mit Hilfe der Rapiditäten ausdrücken. Zu jeder Geschwindigkeit v haben wir in Gl. (1.39) eine Rapidität η definiert, für die gilt tanh η = v c (1.61) Das relativistischen Geschwindigkeits-Additionstheorem (1.60) hat dann die Form des Additionstheorem für den hyperbolischen Tangens, d.h. es addieren sich die Rapiditäten und nicht die Geschwindigkeiten. tanh η = tanh(η1 + η2 ), η = η1 + η2 , (1.62) (1.63) Dies ist gilt analog zur Addition zweier Drehungen um eine feste Achse im drei-dimensionalen Raum, wo sich die Winkel addieren. Wie wir gesehen haben, spielt die Rapidität ja gewissermassen die Rolle eines komplexen Winkels bei den pseudo-euklidischen Rotationen. 1.3 Der Minkowski-Raum Montag 4.2.2002 Die spezielle Lorentz-Transformation stellt eine in einer pseudo-euklidischen Metrik verallgemeinerte Drehung dar. Diese Tatsache können wir zu einer geometrischen Interpretation der oben abgeleiteten Gleichungen heranziehen, die sich in vielen Fällen als sehr nützlich erweist. Wir beschränken uns der Einfachkeit halber auf eine Boost in x-Richtung und betrachten im folgenden die (x, ct)-Ebene. 1.3.1 Das Minkowski-Diagramm In dieser Ebene ist der Lichtkegel festgelegt durch die Linien auf denen sich Photonen vom Ursprung aus mit der Geschwindigkeit ±c bewegen. Es sind dies die Winkelhalbierenden, die die Abszisse unter 45◦ schneiden und festgelegt sind durch ∆s2 = (ct)2 − x2 = 0. Drehungem im zwei-dimensionalen euklidischen Raum um den Ursprung lassen den Abstand vom Ursprung invariant, d.h. sie führen Kreise mit dem Radius r in sich über. Ebenso lassen BoostOperationen den pseudo-euklidischen Abstand ∆s2 = (ct)2 − x2 vom Ursprung invariant, d.h. sie führen die Hyperbeln (ct)2 − x2 = const in sich über. Dem Einheitskreis in der euklidischen Geometrie entsprechen dabei die Eich-Hyperbeln (ct)2 −x2 = ±1. Der Schnittpunkt des Einheitskreises mit der x-Achse S wird bei einer Drehung um den Winkel ϕ in den Punkt S 0 auf dem Einheitskreis übergeführt. Die Fläche des Sektors des Einheitskreises zwischen S und S 0 ist im euklidischen Falle gegeben durch die Hälfte des Winkels ϕ. 157 Abbildung 1.5: Geometrische Darstellung von Drehungen in der Ebene und von speziellen LorentzTransformationen im Minkowski-Diagramm. Im pseudo-euklidischen Falle wird bei einem Boost mit der Rapidität η der Schnittpunkt S der Eichhyperbel mit der Abszisse in den Punkt S 0 auf der Eichhyperbel übergeführt. Auch er ist dadurch bestimmt, dass die Fläche OSS 0 , die einerseits durch den beiden Verbindungslinien OS und OS 0 und andererseits durch die Eichhyperbel eingeschlossen ist, den Wert η/2 annimmt. Im Gegensatz zum euklidischen Fall, wo auch das gedrehte Achsensystem rechtwinklig ist, schliessen die geboosteten x- und ct-Achsen keinen rechten Winkel mehr ein. Die Längen- und Zeit-Skalen im geboosteten System sind durch die Schnittpunkte der Eichhyperbeln mit den neuen Achsen gegeben. Der Extremfall bildet eine Bost mit der Geschwindigkeit c. In diesem Falle fallen die neue Raum- und die neue Zeit-Achse auf den Lichtkegel. Wir machen uns nun geometrisch sehr einfach klar, dass man zwei Ereignisse, die raumartig zu einander liegen, durch einen geeigneten Boost so transformieren kann, dass sie gleichzeitig im bewegten System gleichzeitig sind. Entsprechend lassen sich Ereignisse, die zeitartig zu einander liegen durch eine entsprechenden Lorentz-Boost zu Ereignissen transformieren, die am selben Ort stattfinden. Es ist auch relativ einfach, sich mit Hilfe des Minkowski-Diagramms die Effekte von Längenkontraktion und Zeitdilatation geometrisch zu veranschaulichen. 1.3.2 Lorentz-Skalare und Vierer-Vektoren Nachdem wir nun das Transformationsverhalten der Ortskoordinaten unter Lorentz-Transformationen ausführlich studiert haben, können wir die Begriffe von Skalaren, Vektoren und Tensoren erweitern. Wir definieren als einen Viererskalar oder Lorentz-Skalar eine Grösse, die bei einer LorentzTransformation invariant bleibt. Das Linienelement in der vier-dimensionalen Raum-Zeit ist ein Beispiel für einen derartigen Lorentz-Skalar. Ein weiteres Beispiel ist die Eigenzeit τ eines Massenpunktes, 158 die eine auf seiner Reise durch den Minkowski-Raum mitgeführte Uhr anzeigt. Wenn sich der Punkt auf der Kurve r(t) mit der Geschwindigkeit v(t) bewegt, dann lässt sich zu jedem Zeitpunkt das infinitesimale Eigenzeitelement dτ mittels einer Lorentz-Transformation aus dem Zeitintervall auf einer ruhenden Uhr dt berechnen. Auf Grund der Zeitdilatation ergibt sich s dτ = 1− v2 dt c2 (1.64) Durch Integration längs der Bahnkurve ergibt sich die Eigenzeit dann zu Zt s τ (t) = 1− 0 v2 (t0 ) 0 dt c2 (1.65) Die Eigenzeit dτ ist ein Lorentzskalar, da sie gerade dem vier-dimensionalen Längenelement ∆s entspricht. Im bewegten System verschwindet nämlich der räumliche Abstand |∆r|, weil die Uhr, auf der die Eigenzeit abgelesen wird, vom Massenpunkt mitgeführt wird. Als nächstes definieren wir Vierervektoren als 4-Tupel von Zahlen aµ = (a0 , a1 , a2 , a3 ), (1.66) die sich bei homogenen Lorentz-transformationen wie die vier-dimensionalen Raum-Zeit-Komponenten xµ transformieren. Beispiele sind die natürlich die Koordinaten xµ , aber auch der vier-dimensionale Gradient ∂µ = 1 ∂ = ( ∂t , −∇) ∂xµ c (1.67) Der vier Zeitableitungen dxµ /dt bilden keinen Vierervektor, da ja dt kein Skalar, sondern die 0te Komponente eines Vierervektors ist. Wir können aber einen Vierer-Vektor der Geschwindigkeit definieren, wenn wir nicht nach der Zeit t sondern nach der Eigenzeit τ differenzieren. Wir erhalten so die Vierergeschwindigkeit: µ u dxµ = = dτ à γc γv ! à = γc 1 β ! . (1.68) Die Komponenten dieser Vierergeschwindigkeit sind nicht unabhängig. Es gilt vielmehr uµ uµ = γ 2 c2 (1 − β 2 ) = c2 . (1.69) Skalarprodukte von Vierervektoren, wie z.B. aµ bµ sind Skalare. Ein Beispiel ist der D’Alembert Operator 2 := ∂µ ∂ µ = 1 ∂2 − ∆, c2 ∂t2 (1.70) oder die vier-dimensionale Divergenz eines Vierer-Vektors aµ ∂µ a = 1 0 ∂t a + ∇a. c 159 (1.71) Ein Vierervektor aµ heisst raumartig, lichtartig oder zeitartig, je nachdem aµ aµ < 0, 0 or > 0. Wir können auch vier-dimensionale Integrale über Bereiche im Ereignisraum definieren: Zt2 Z µ 4 F (x ) d x = cdt dx x1 t1 V4 Zy2 Zx2 Zz2 dy y1 dz F (ct, x, y, z), (1.72) z1 mit geeigneten Integrationsgrenzen, die bei krummlinigen Berandungen des Gebietes V4 eventuell noch von den Koordinaten abhängen können. Es gibt auch eine vier-dimensionale Verallgemeinerung des Gauss’schen Satzes: Z Z ∂µ aµ d4 x = V4 aµ dfµ , (1.73) [V4 ] wobei [V4 ] die drei-dimensionale Berandung des vier-dimensionalen Gebietes V4 ist. Schliesslich sei noch darauf hingewiesen, dass wir in völlig analoger Weise zu den drei-dimensionalen Tensoren Vierer-Tensoren höherer Stufe einführen können. Je nach der Stellung ihrer Indizes T µν , T µν transformieren sich sich kogredient, kontragredient oder gemischt zu den Viererkoordinaten. 1.4 Relativistische Mechanik 1.4.1 Die Lagrange-Funktion Wir wollen uns hier der Einfachheit halber zunächst nur auf die relativistische Bewegung eines freien Massenpunktes beschränken. Da die Newton-Gleichung mr̈ = 0 galilei-invariant ist, kann sie im allgemeinen nicht lorentz-invariant sein. wir haben daher die Mechanik neu zu formulieren. Dazu gehen wir wieder von der Hamilton’schen Wirkung S aus. Das Wirkungsintegral Z2 S = Z2 Ldt = 1 dS (1.74) 1 darf nicht vom Bezugsystem abhängen. Es muss also ein Skalar sein. Wir erinnern uns das das vierdimensionale Wegelement, das proportional zur Eigenzeit ist, und einen Skalar darstellt, und machen den folgenden Ansatz dS = − αds = − αcdτ (1.75) Dabei ist α eine Konstante, die später so festgelegt werden soll, dass sich im Grenzfall kleiner Geschwindigkeiten der richtige nicht-relativistische Grenzfall ergibt. Wir erhalten dann für das Wirkungsintegral Z2 S = −α Z2 ds = − αc 1 Z2 dτ = − α 1 s 1− 1 v2 dt. c2 (1.76) Die Lagrangefunktion ist also gegeben durch s L(r, v) = − αc 1 − 160 v2 . c2 (1.77) Im Grenzfall kleiner Geschwindigkeiten erhalten wir durch Taylorentwicklung à ! 1 v2 L = − αc 1 − + ... 2 c2 = − αc + 1α 2 v . 2c (1.78) Bis auf die unwichtige Konstante αc soll sich für kleine Geschwindigkeiten die nicht-relativistische Lagrangefunktion für ein freies Teilchen ergeben. Wir wählen also αc = m0 c2 und erhalten für die relativistische Lagrange-Funktion eines freien Teilchens mit der Ruhemasse m0 s L = − m0 c2 1 − 1.4.2 v2 c2 (1.79) Energie und Impuls Nach den Regeln der kanonischen Mechanik ergibt sich der Impuls aus der Lagrangefunktion durch Differentiation nach der Geschwindigkeit p = ∂L v = m0 p = mv ∂v 1 − β2 (1.80) mit der geschwindigkeitsabhängigen Masse m0 1 − β2 m = p (1.81) Die Lagrange-Gleichungen zweiter Art lauten dann dp d m0 q = v = 0 dt dt 1 − v2 (oder =F bei einer äusseren Kraft) (1.82) c2 Für die Energie ergibt sich die berühmte Einstein’sche Formel q m0 v 2 m0 2 E = pv − L = p + m c 1 − β2 = p c2 = mc2 , 0 2 1−β 1 − β2 (1.83) welche für keine Geschwindigkeiten in den nichtrelativistischen Ausdruck E = m0 c2 + 1 m0 v2 2 (1.84) üebergeht. Der erste Term stellt dabei die Ruheenergie des Teilchens dar. Sie spielt bei der Ableitung der Bewegungsgleichungen keine Rolle. Schliesslich wollen wir die Geschwindigkeit durch den Impuls ersetzen und erhalten auf diese Weise die Hamilton-Funktion und die relativistische Energie-ImpulsBeziehung oder E2 m20 c2 = = p2 + m20 c2 c2 1 − β2 (1.85) q E = p2 + m20 c2 c (1.86) 161 Wir können auch den Impuls p und die Energie E durch die Vierergeschwindigkeit ausdrücken und erhalten m0 v = m0 γv = m0 u, 1 − β2 m0 p c = m0 γc = m0 u0 . 1 − β2 p = E c (1.87) p = (1.88) und können dadurch den Vierervektor des Impulses definieren à p µ = E/c p ! = m0 cuµ (1.89) Falls m0 6= 0 werden für v = c Impuls und Energie des Teilchens unendlich, d.h. Teilchen mit endlicher Ruhemasse können Lichtgeschwindigkeit nicht erreichen. Für Teilchen mit verschwindender Ruhemasse gilt E = pc 1.4.3 (1.90) Die Vierer-Kraft Schliesslich definieren wir noch den Vektor der Vierer-Kraft ein als dpµ duµ = m0 . dτ dτ fµ = (1.91) Da uµ uµ = −c2 verschwindet uµ duµ /dt und es folgt uµ f µ = 0. (1.92) Die räumlichen Komponenten der Viererkraft sind fi = γFi = γ dpi , dt (1.93) und für die zeitliche Komponente ergibt sich f0 = d E γ γ = Ė = Λ, dτ c c c (1.94) wobei Λ = Ė die Leistung ist. Die Viererkraft lässt sich also zusammenfassen als à f µ = γ Λ/c F ! . (1.95) Die Geschwindigkeitsabhängigkeit der Masse bewirkt Abweichungen vom Newton’schen Gesetz mv̇ = F. Wir erhalten nun dp d v F = = m0 q dt dt 1 − µ v2 c2 vv̇ m v = mv̇ = 2 1−β c2 ¶ (1.96) Insbesondere ergibt sich daraus für die Longitudinalbeschleunigung Fk = v dv F = mk v dt 162 (1.97) mit der longitudinalen Masse m0 p , ( 1 − β 2 )3 (1.98) v v × F = m⊥ × v̇ v v (1.99) mk = und für die Transversalbeschleunigung F⊥ = mit der transversalen Masse m0 , 1 − β2 m⊥ = p 163 (1.100)