3 Über die Physik des Aufpralls
Werbung

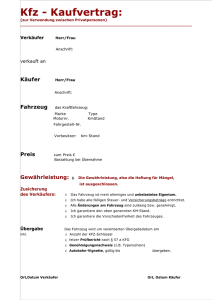
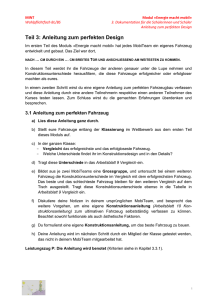
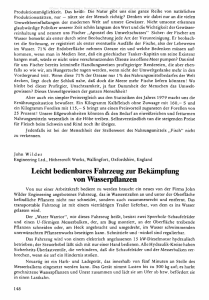
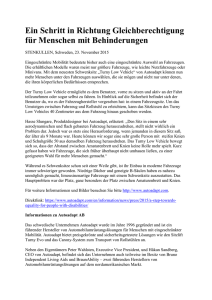
Version vom 30. August 2000 3 Über die Physik des Aufpralls Wie lange dauert ein Aufprall? Welche Kräfte sind dabei im Spiel? Welchen Einfluss haben Geschwindigkeit, Proportionen und Gewicht des Insassen, sowie Größe und Aufblasdauer des Luftsacks? Diese Fragen können auf verschiedene Art beantwortet werden. Die praktische Methode ist die Messung am existierenden Fahrzeug. Dabei wird ein Kollisionsversuch („Crashtest“) durchgeführt und mit Hochgeschwindigkeitskameras aufgezeichnet. Anschließend kann die Verformung des Fahrzeugs und die Bewegung des Insassen genau beobachtet werden. Dieses Verfahren ist sehr kostspielig und kann erst durchgeführt werden, wenn Prototypen des Fahrzeugs bereits gebaut sind. Somit können natürlich nur einzelne Stichproben gezogen werden. Die gestellten Fragen, in ihrer Allgemeinheit, werden nicht beantwortet. Eine theoretische Methode ist die Simulation mit sogenannten „finiten Elementen“. Dabei wird ein Körper, hier das Fahrzeug, durch eine endliche Zahl von Knoten, also Massepunkten angenähert. Jeder Knoten steht dabei im Wechselspiel der Kräfte und Bewegungen mit seinen Nachbarknoten. In diskreten Zeitschritten kann ein leistungsstarker Rechner den Verlauf der Verformung berechnen. Für diese Methode müssen Pläne des Fahrzeugs bereits vorliegen. Zudem erfordert eine genaue Simulation einige Millionen Knoten und sehr kleine Zeitschritte. Die Simulation eines einzelnen Unfalls dauert auch auf leistungsstarken Rechnern derzeit mehrere Stunden. Dieses Verfahren kann daher auch nur einzelne Stichproben simulieren. Zudem sind die Ergebnisse für den Menschen nicht mehr nachvollziehbar. In diesem Kapitel wird eine dritte Möglichkeit vorgestellt. Das Fahrzeug wird auf ein einfaches physikalisches Modell reduziert. In dieses Modell gehen nur die wesentlichen Kenngrößen des Fahrzeugs und der Insassen ein, also Masse, Größe und Verformungs-Charakteristik. Die Verformungs-Charakteristik kann vorgegeben oder aus den Messungen eines Kollisionsversuchs abgeleitet werden. Mit den Gesetzen der Physik lassen sich nun weitreichende Aussagen über die Vorgänge bei einer Kollision ableiten. Der Rechenaufwand ist so gering, dass er teilweise mit Papier und Bleistift durchgeführt werden kann. Warum wird diese Art der Modellierung gewählt? 22 Über die Physik des Aufpralls Es gibt verschiedene Ansätze, das charakteristische Verhalten des Fahrzeugtyps zu modellieren. Der Ansatzpunkt dieser Arbeit ist das Kraftverhalten des Körpers in Abhängigkeit der Verformung. Es wird als unveränderliches Merkmal eines Fahrzeugtyps angenommen und mittels einer Kennlinie modelliert. Das gesamte Verhalten lässt sich dann aus dieser Kennlinie ableiten. Dadurch ist dieses Modell vollständig deduktiv. Ein anderer Ansatz geht über das Frequenzspektrum, das durch Fouriertransformation aus den Experimentaldaten gewonnen wird. Es basiert auf Beobachtungen über den zeitlichen Verlauf der Kollision. Ebenfalls gute Ergebnisse werden erzielt, wenn man die Kollisionsdauer als konstant ansieht und den Beschleunigungsverlauf mit Polynomen verschiedenen Grades annähert. Diese Verfahren sind jedoch induktiv und erfordern die Beobachtung mehrerer Kollisionen. Dadurch sind die Ergebnisse zwischen verschiedenen Fahrzeugtypen häufig unterschiedlich. Das Kapitel gliedert sich in drei Teile. Zuerst wird die Modellierung des Fahrzeugs vorgestellt. Der zweite Teil behandelt das physikalische Verhalten des Insassen. Im dritten Teil werden Folgerungen für eine ideale Knautschzone und den bestmöglichen Schutz des Insassen gezogen. 3.1 Das Fahrzeug 3.1.1 Die klassische Mechanik Der folgende Abschnitt enthält die Grundlagen der Newtonschen Mechanik. Er dient dazu, die Schreibweisen vorzustellen und die grundlegenden Gesetze zu wiederholen. Der vorgebildete Leser mag diesen Abschnitt überspringen. Die Nomenklatur entspricht den üblichen Bezeichnungen der Physik, wie sie beispielsweise in [12] zu finden ist. Verwendet werden ausschließlich die gesetzlichen Einheiten [13]. Bewegungen lassen sich durch die drei Größen Beschleunigung, Geschwindigkeit und Weg beschreiben. Es handelt sich um vektorielle Größen, die in einer, zwei oder drei Dimensionen vorliegen. Im Folgenden werden sie eindimensional betrachtet. Bekanntermaßen entspricht die Geschwindigkeit v dem Weg s pro Zeit t. Die Beschleunigung a ist die Geschwindigkeitsänderung pro 23 Version vom 30. August 2000 Zeit. ∆s a ∆t v ∆v ∆t (1) Im Kontext dieser Arbeit tritt Beschleunigung häufig als Verzögerung auf. Physikalisch sind diese Begriffe austauschbar. Fährt ein Fahrzeug auf ein anderes, stehendes auf, so sind die Kräfte beider Fahrzeuge gleich. Ob die Geschwindigkeit zunimmt oder abnimmt, ist eine Frage des Bezugssystems („Hält Wien an diesem Zug?“). Im Folgenden kann daher der Begriff „Beschleunigung“ auch eine „Verzögerung“ im üblichen Sinne beschreiben. Im Kollisionsverlauf ist nur die Differenzgeschwindigkeit der beiden Objekte wichtig. Es gelten in Abhängigkeit von der Zeit t die Zusammenhänge: a t dv t dt t t v t ds t bzw. s t v τ dτ v t a τ dτ (2) dt 0 0 Neben den Bewegungsgleichungen werden die Zusammenhänge mechanischer Kraft, Arbeit und Energie benötigt. Um einen Körper der Masse m mit a zu beschleunigen, ist eine Kraft F nötig. Sie wird in der Einheit Newton N angegeben. m a F (3) Arbeit W wird dadurch verrichtet, dass eine Kraft F auf einen Punkt ausgeübt wird, dieser der Kraft nachgibt und sich um die Strecke s bewegt W F s. Die Einheit ist Joule J. Ist die Kraft F nicht konstant, sondern vom Weg s abhängig, so führt eine Grenzwertbetrachtung auf den Zusammenhang: s W s F x dx (4) 0 Aus den genannten Zusammenhängen lassen sich weitere ableiten. Für die Bewegungsenergie gilt: W 24 1 2 mv 2 (5) Über die Physik des Aufpralls Zuletzt ist noch die physikalische Leistung zu nennen. Sie gibt an, wie schnell die Arbeit verrichtet wird und ergibt sich durch Ableitung der Arbeit nach der Zeit. Die Einheit der Leistung ist Watt W. P t dW t dt (6) Diese Gleichungen sind ausreichend für das physikalische Modell. 3.1.2 Verformung Ein Fahrzeug, das auf eine Mauer prallt, verformt sich. Physikalisch unterscheidet man dabei zwischen plastischer und elastischer Verformung. Plastische Verformung ist am einfachsten als Knetmasse vorstellbar. Lässt die verformende Kraft nach, bleibt die Verformung erhalten. Elastische Verformung tritt bei einer Feder, einem Gummiball oder einem Luftballon auf. Sie unterscheidet sich von der Plastischen dadurch, dass sich die Verformung mit dem umgekehrten Kraftverlauf wieder rückbildet. Die rein plastische oder rein elastische Verformung ist ein physikalisches Idealmodell. Das aufprallende Fahrzeug erfährt beide Arten. Die plastische Verformung ist nach einer Kollision deutlich sichtbar. Die elastische Verformung ist dadurch erkennbar, dass das Fahrzeug nach dem Aufprall leicht zurückfedert. In diesem Modell wird die Unterscheidung zwischen plastischer und elastischer Verformung außer acht gelassen. Die Modellierung endet, sobald der Massepunkt keine Geschwindigkeit mehr besitzt. Das Zurückfedern kann somit nicht mehr modelliert werden. Wie sich zeigen wird, muss die Auslösung in allen Fällen bereits vor dem Zurückfedern erfolgen, so dass dieses Modell zur Beschreibung des Vorgangs ausreicht. Der zeitliche Verlauf der Verformung hängt von der Kraftcharakteristik des Verformungsobjektes ab. Zur Modellierung dieser Charakteristik wird eine „Kraftkennlinie“ verwendet. Sie beschreibt im eindimensionalen Modell den Zusammenhang zwischen Verformungsstrecke s und Kraft F. Es handelt sich daher um eine Funktion F s . Die Berechnung der zeitabhängigen Funktionen F t , a t , v t , s t aus der 25 Version vom 30. August 2000 Kraftkennlinie ergibt sich aus den Gleichungen 2 und 3: s̈ t a t F s t m t t v t a τ dτ s t v τ dτ 0 (7) 0 Es handelt sich um eine Differenzialgleichung. Die Beschleunigung, also die zweite Ableitung des Weges, ist proportional zur Kraft. Die Kraft ist abhängig vom Weg, dieser von der Geschwindigkeit und die Geschwindigkeit wiederum von der Beschleunigung. Ob es eine geschlossene Lösung für die Gleichung gibt, hängt von der Kraft-Weg-Funktion F s ab. F(s) a(t) s F(s) s t Konstante Kraft F(s) Verdichtungskraft t Lineare Kraft a(t) s a(t) F(s) t a(t) s t Schwellwert Abbildung 9: Verschiedene Kraft-Weg-Gesetze Im Folgenden werden mechanische Kraftmodelle vorgestellt, die sich physikalisch ideal verhalten, also mathematisch beschreibbar sind (Abbildung 9). Es wird ein horizontales Bezugssystem verwendet, das seinen Ursprung am Fußpunkt der Mauer hat. Die positive Halbachse zeigt nach rechts. Ein Massepunkt bewegt sich von rechts nach links. Die Geschwindigkeit ist in diesem Bezugssystem negativ. Die Gegenkraft wirkt von links nach rechts, ist also positiv. Die Beschleunigung (hier Verzögerung) des Massepunktes geht nach rechts, ist also größer null. Der Zeitpunkt der Berührung sei t 0. 26 Über die Physik des Aufpralls 3.1.3 Konstante Kraft Bei einer konstanten Kraft F s ist der genannte Zusammenhang keine echte Differenzialgleichung, da a t ebenfalls konstant ist. Das System lässt sich leicht lösen und führt zur Erkenntnis, dass v linear abgebaut wird und s quadratisch. Konstante Kraft tritt beispielsweise bei Reibung auf, F s konstant. In Abbildung 9 (links oben) wird ein Quader auf einer Fläche geschoben. Die Bewegungsgleichungen lauten: a t F v t v0 a t s t s0 v0 t a t 2 m 2 (8) 3.1.4 Lineare Kraft Beim linearen Kraftgesetz F s D s0 s t , mit dem beispielsweise eine Schraubenfeder angenähert wird (Abbildung 9), lässt sich die Differenzialgleichung ebenfalls lösen. Hierdurch ergibt sich die harmonische Schwingung, die durch eine Sinusfunktion beschreibbar ist. Sie ist festgelegt durch die Winkelgeschwindigkeit ω und die Amplitude A. Die Winkelgeschwindigkeit hängt vom Verhältnis der Federkonstante zur Masse ab. Die Amplitude ist proportional zur Geschwindigkeit [12]. a t ω2 A ω2 sin ωt D A v0 m ω v t A ω cos ωt s t s0 A sin ωt (9) 3.1.5 Verdichtungskraft Betrachtet man eine Verdichtungsfunktion, also beispielsweise einen mit Gas gefüllten Zylinder, so ergibt sich annäherungsweise eine Kraft, die umgekehrt proportional zum Weg ist F s K s (Abbildung 9). Die zugehörige Differenzialgleichung lässt sich nicht mehr geschlossen lösen [14]. 27 Version vom 30. August 2000 3.1.6 Schwellwert Der Schwellwert steht für einen Bruchvorgang (Abbildung 9). Vorstellbar ist beispielsweise ein unelastisches Glasplättchen. Ab einer gewissen Kraft wird es brechen. Da bei diesem theoretischen Modell keine Energie, also Geschwindigkeit, abgebaut wird, ist diese Kraftfunktion nur in Verbindung mit anderen Kräften sinnvoll. 3.1.7 Zusammengesetzte Kräfte F(s) F(s) a(t) s a(t) s t t ? F(s) a(t) s F(s) t a(t) s t Abbildung 10: Kombination von Kraftelementen Diese eindimensionalen Kräfte lassen sich parallel und in Reihe kombinieren. Parallel addieren sich die beiden Kräfte, in Reihe wird sich jeweils ein Gleichgewicht einstellen. Abbildung 10 verdeutlicht das. Dadurch lässt sich jede Kennlinie beliebig genau annähern. 3.1.8 Anwendung des Modells auf die Fahrzeugverformung Auf diese Art kann ein beliebiges Fahrzeug modelliert werden. Die Knautschzone wird als masselos betrachtet, der Käfig mit den Insassen als unverformbar. Die Kraftkennlinie kann beliebig gewählt werden. Allerdings müssen natürlich die Größenordnungen des Gesamtsystems berücksichtigt werden. So 28 Über die Physik des Aufpralls liegt die Masse des Fahrzeugs zwischen 1000 kg und 1500 kg. Die maximale Verformung der Knautschzone beträgt weniger als 1 m, auch bei großen Fahrzeugen. Die Aufprallgeschwindigkeit wird im Bereich 0 - 100 km/h betrachtet. Dieser Bereich ist recht großzügig gewählt. Wie sich zeigen wird, liegen die physikalischen, mechanischen und biologischen Grenzen für einen wirksamen Insassenschutz bereits bei etwa 70 km/h. v m v m F F s s Abbildung 11: Einfaches Modell des Aufpralls 3.1.9 Verschiedene Kraftkennlinien Für die quantitative Untersuchung werden nun sechs verschiedene Kraftkennlinien verglichen. Sie sind in Abbildung 12 dargestellt. Jede entspricht einem virtuellen Fahrzeug. Im Gegensatz zu den vorhergehenden Darstellungen wird hier mit der Deformation, also der Differenz d s0 s gerechnet. Dies vereinfacht die Rechnung. Daher sind die Kurven im Vergleich zu Abbildung 9 und 10 horizontal gespiegelt. Um das Verhalten vergleichbar zu machen, wurde ein maximaler Verformungsweg dmax von 65 cm verwendet. Für d 65 cm wird eine unendliche Kraft angenommen. Alle Kennlinien sind so normiert, dass bei v0 55 km h eine Verformung von 60 cm erfolgt. Dies stimmt mit dem Verhalten der gemessenen Daten überein. Der 55-km/h-Kollisionsversuch (NCAP [W14]) ist der schwerste, der von Herstellern, Autozeitschriften und Sicherheitsorganisationen durchgeführt wird. Bei höheren Geschwindigkeiten werden die mechanischen Belastungen der Fahrgastzelle so hoch, dass sie sich verformt. Da29 Version vom 30. August 2000 durch treten weitere Effekte und Verletzungsrisiken ein, die durch dieses Modell nicht erfasst werden. F [MN] 1.0 F [MN] 1.0 F [MN] 1.0 0.8 0.8 0.8 0.6 0.6 0.6 0.4 0.4 0.4 0.2 0.2 20 40 60 d [cm] 0.2 20 Fahrzeug 1 40 60 d [cm] 20 Fahrzeug 2 F [MN] 1.0 F [MN] 1.0 0.8 0.8 0.8 0.6 0.6 0.6 0.4 0.4 0.4 0.2 0.2 20 40 60 Fahrzeug 4 60 d [cm] Fahrzeug 3 F [MN] 1.0 d [cm] 40 0.2 20 40 60 Fahrzeug 5 d [cm] 20 40 60 d [cm] Fahrzeug 6 Abbildung 12: Verschiedene Kraftkennlinien Kennlinie 1 steht für eine Knautschzone mit konstantem Kraftverlauf. Kennlinie 2 zeigt eine lineare Verformung mit einer Federkonstante von 0,7 MN/m. Kennlinie 3 ist eine Hyperbel, mit der das Kraftverhalten verdichteter Gase angenähert wird. Kennlinie 4 zeigt eine zweistufige Verformungzone mit einem konstanten weichen und einem härteren Bereich. Kennlinie 5 steht beschreibt einen linearen Kraftzuwachs, einen Bruchvorgang und einen weiteren linearen Verlauf. Kennlinie 6 wurde aus den Messdaten eines echten Fahrzeugs ermittelt. Die Gleichungen der Kennlinien lauten: 215 kN für d 65 cm F1 d ∞ kN sonst 30 Über die Physik des Aufpralls 0 7 MN m d ∞ kN F2 d für d 65 cm sonst für d 65 cm sonst kN m 50 0 65 m d ∞ kN F3 d 100 kN für d 25 cm F4 d 300 kN für 25 cm d 65 cm ∞ kN 1 F5 d 1 sonst für d 25 cm 21 cm für 25 cm d 65 cm ∞ kN sonst nicht analytisch angebbar F6 d 2 MN m d MN 2 m d 3.1.10 Die Berechnung des Beschleunigungsverlaufs Wie angenommen, hängt die Kraft in diesem Modell nur vom Weg, also der Verformung ab. Das bedeutet, dass die plastische Verformung eines Aufpralls mit 50 km/h grundsätzlich genauso erfolgt wie mit 20 km/h. Der zeitliche Ablauf ist jedoch unterschiedlich. Die Verformung endet, wenn die Bewegungsenergie in plastische Verformung umgesetzt ist. Bei 20 km/h endet sie daher natürlich bei geringerer Verformung als bei 50 km/h. Die Berechnung der zeitabhängigen Funktionen aus der Kraftkennlinie erfolgt nach den genannten physikalischen Zusammenhängen (Gleichung 7). Zur einfachen Betrachtung der mechanischen Vorgänge bei einer Kollision wird der frontale Aufprall auf eine Betonmauer beispielhaft zugrunde gelegt (siehe Abbildung 11). Unter diesen Annahmen können jetzt der Beschleunigungsverlauf und eine Vielzahl weiterer Eigenschaften abgeleitet werden. Die Bewegung ist eindeutig festgelegt durch ein Anfangswertproblem a v d t a v d 0 F! d t m t ! 0t a τ dτ 0 v τ dτ a v d 0 0 v0 0 (10) Da schon bei einfacheren Kraftkennlinien die Analysis versagt, also die Diffe31 Version vom 30. August 2000 $30a [g] 20 10 0 # 20 "60 %40 " 60 & 80 # 20 v#0 [km/h] 20 100 $30a [g] # # 20 v#0 [km/h] 20 100 "60 & 80 40 t [ms] "60 & 80 "60 20 10 0 # 20 v#0 [km/h] 40 20 100 "60 20 10 0 40 "60 & 80 40 t [ms] 40 t [ms] $30a [g] 40 $30a [g] "60 20 10 0 "60 20 10 0 40 t [ms] 20 $30a [g] t [ms] v#0 [km/h] 20 100 $30a [g] "60 20 10 0 # 40 20 v#0 [km/h] 40 20 100 "60 & 80 40 t [ms] "60 & 80 40 v#0 [km/h] 20 100 Abbildung 13: Beschleunigungsverläufe von 0 - 70 km/h renzialgleichung nicht geschlossen lösbar ist, muss die Numerik herangezogen werden. Die folgenden Berechnungen wurden vom Rechner durchgeführt. Im Gegensatz zu aufwendigen finiten Elementen dauert diese Simulation nur den Bruchteil einer Sekunde. Die Kraftkennlinie ist dabei als Liste von Stützstellen im Abstand 1 mm implementiert. Der Zugriff auf Zwischenwerte erfolgt durch lineare Interpolation. Der Zeitschritt ∆t beträgt 0,1 ms. Eine Kollision von 100 ms wird somit in 1000 Zeitschritte aufgelöst. Das Anfangswertproblem wird gelöst durch die Formel: a v d t ∆t F d t m v t a t ∆t ' ∆t d t v t ∆t ' ∆t a v d 0 0 v0 0 (11) Die Genauigkeit der Berechnung ist ausreichend. Eine Verfeinerung der Zeitschritte und der Stützstellen um jeweils den Faktor 10 ändert das Ergebnis um weniger als ein Prozent. Dies liegt weit unter der Genauigkeit der Messdaten. Abbildung 13 zeigt verschiedene Beispiele von Beschleunigungsverläufen für eine Aufprallgeschwindigkeit von 0 bis 70 km/h. Die Masse m beträgt 1120 kg, wie bei den Daten der echten Messung. Die Simulation endet, wenn das Zurückfedern beginnt. Die Grafiken entsprechen den Kennlinien der Fahrzeuge 1 - 6 aus Abbildung 12 und sind ebenso angeordnet. 32 Über die Physik des Aufpralls T [ms] 100 T [ms] 100 50 T [ms] 100 50 10 20 30 40 50 60 70 v [km/h] T [ms] 100 50 10 20 30 40 50 60 70 v [km/h] T [ms] 100 50 50 10 20 30 40 50 60 70 v [km/h] 10 20 30 40 50 60 70 v [km/h] T [ms] 100 50 10 20 30 40 50 60 70 v [km/h] 10 20 30 40 50 60 70 v [km/h] Abbildung 14: Kollisionsdauer Interessant ist die Beobachtung, dass die gemessene Verzögerung mit zunehmender Geschwindigkeit nicht unbedingt steigt, sondern sich der Verlauf wie eine Zieharmonika zusammenschiebt. Dieser Ziehharmonika-Effekt wird an der Kurvenschar 6 (rechts unten) am deutlichsten. Die entsprechenden Verformungsteile erzeugen keine höhere Verzögerung sondern werden früher durchlaufen. Höhere Verzögerungen treten bei höheren Geschwindigkeiten erst auf, wenn stärkere Verformungen erreicht werden. Ebenfalls interessant ist die Beobachtung, dass bei verschiedenen Geschwindigkeiten die Dauer der Kollision recht unterschiedlich sein kann, und keinen einfachen Zusammenhang erkennen lässt. Dies zeigt Abbildung 14. Bemerkenswert ist, dass die Dauer nicht in einer monotonen Beziehung zur Aufprallgeschwindigkeit steht. Tritt bei einer sehr kleinen Restgeschwindigkeit der Fall auf, dass die Gegenkraft bei dieser Verformung nahe 0 ist, so kann der Abbau dieser Restgeschwindigkeit beliebig langsam erfolgen. Die Kollisionsdauer ist daher nicht nach oben beschränkt. Vorgreifend auf die folgenden Kapitel ist festzustellen: Zu Beginn unterscheiden sich schnelle und langsame Kollisionen nur wenig in der Stärke der Verzögerung. Da die Auslösung des Prallsacks bereits in der Anfangsphase entschieden werden muss, kann die Stärke der Beschleunigung nicht als alleiniges Kriterium herhalten. Der „pathologische“ Fall ist dabei übrigens die konstante Verzögerung (Fahrzeug 1). Hier ist die Verzögerung in der Anfangsphase immer gleich, unabhängig von der Aufprallgeschwindigkeit. Die zuverlässige 33 Version vom 30. August 2000 Auslösung des Rückhaltesystems durch Beschleunigungsmessung ist folglich nicht möglich, da auch bei kleinem Wert von v0 sofort die volle Beschleunigung wirkt. 3.1.11 Verallgemeinertes Modell Das bisher vorgestellte Modell besteht aus einem Massepunkt und einer Kennlinie. Es repräsentiert den Frontalaufprall auf eine Betonmauer. Der feste Punkt „Betonmauer“ lässt sich nun verallgemeinern, indem man beliebige Gegenstände als Zielobjekte zulässt. Sie werden auf dieselbe Art modelliert wie das Fahrzeug, also durch eine Masse und eine Kraftkennlinie. Abbildung 15 zeigt verschiedene Beispiele: eine unverformbare Masse von 100 kg, einen masselosen Pfosten mit linearem Kraftverlauf und ein anderes Fahrzeug mit einer bestimmten Masse und einer eigenen Kraftkennlinie. v1 m1 v1 m1 100kg Tons v2 m2 v1 m1 Abbildung 15: Kollisionen mit verschiedenen Zielobjekten Die allgemeinste Form entspricht der Fahrzeug-Fahrzeug-Kollision. Dabei werden beide Fahrzeuge gleichberechtigt mit Geschwindigkeit, Masse und Ort modelliert. Die Simulation erfolgt unter der Annahme, dass während der Deformationsphase das jeweils weichere Fahrzeug w nachgibt und das Härtere h nicht verformt wird. Welches Fahrzeug härter und welches weicher ist, 34 Über die Physik des Aufpralls hängt von der Verformung ab und wechselt mehrfach während des Kollisionsvorgangs. Die Fahrzeuge sind mit 1 und 2 nummeriert. wt und ht sind die Nummern des jeweils weicheren und härteren Fahrzeugs zum Zeitpunkt t. Es gilt: wt ht )(+* 1 2 2 1 -, Fwt dwt t . Fht dht t / (12) Die Kraft zwischen den beiden Massepunkten wird bestimmt durch die Verformungskraft des weicheren Fahrzeugs: m1 a1 t m2 a2 t Fwt dwt t (13) Die zugehörige Differenzialgleichung des kontinuierlichen Modells lautet: 00 vwt d dwt t dt vht 211 dht 00 awt v2 v 1 t aht 21 1 0 (14) Entsprechend lautet die Differenzengleichung der numerischen Simulation: 00 vwt dwt t ∆t 3 vht 21 1 dht 00 vwt dwt t vht 21 1 dht 00 awt v2 v 1 t ' ∆t aht 21 1 0 (15) Die Massen der Fahrzeuge m1 und m2 sind frei wählbar. Die Anfangsgeschwindigkeiten und Örter der beiden Objekte dienen als Startwert der Simulation. Abbildung 16 zeigt verschiedene Beschleunigungsverläufe. Die beiden linken sind Simulationen mit den Zielobjekten aus Abbildung 15, die rechte entspricht dem einfachen Modell. Die Simulation bricht ab, wenn die beiden Objekte keine Geschwindigkeitsdifferenz mehr besitzen. Danach folgt das Zurück- oder Auseinanderfedern, dass nicht mehr simuliert wird. Die Beschleunigungen und Kräfte sind beim Zurückfedern jedoch wesentlich kleiner. Abbildung 16 zeigt, dass verschiedenartige Kollisionen zu Beginn sehr ähnlich verlaufen. Auch dies zeigt die Schwierigkeit, anhand des Beschleunigungsverlaufs zuverlässige Auslösekriterien für das Rückhaltesystem zu finden. Ein 35 Version vom 30. August 2000 25 a [g] 25 a [g] 25 a [g] 20 20 20 15 15 15 10 10 10 5 t [ms] 5 t [ms] 5 t [ms] 20 40 60 80 100 20 40 60 80 100 20 40 60 80 100 Stein (100 kg) Fahrzeug (1500 kg) Betonmauer Abbildung 16: Beschleunigung des Fahrzeug 6 beim Aufprall auf verschiedene Zielobjekte (v0 = 40 km/h) 100 kg-Stein stellt keinen Anlass für eine Auslösung dar, erzeugt aber zu Anfang ein nahezu identisches Beschleunigungsmuster wie der Aufprall auf die Betonmauer. 3.1.12 Energie Aus der Kraftkennlinie erhält man durch Integration über s die Energiekennlinie (Gleichung 4). Da die Kraftkennlinie durchweg größer Null ist, steigt die Energiekennlinie monoton. An ihr lässt sich ablesen, welche Verformung eine bestimmte Anfangsenergie am Fahrzeug hervorruft. Abbildung 17 zeigt die abgebaute Energie bezüglich der Verformung. Das Beispielfahrzeug der Masse 1120 kg besitzt bei 30 km/h eine Bewegungsenergie von 39 kJ (Gleichung 5). Beim Frontalaufprall verformt es sich um 41 cm. Der Umkehrschluss, also die Folgerung von der Verformung auf die Aufprallgeschwindigkeit, ist aufgrund der Monotonie der Energiekennlinie ebenso zulässig. Anmerkung: Eine Energie von 39 kJ entspricht dem Brennwert von 2 g Schokolade oder etwa einer hundertstel Kilowattstunde. Das erscheint sehr wenig, um die Knautschzone eines Fahrzeugs um 41 cm zu verformen. Zieht man jedoch in Betracht, dass auch nur wenige Tropfen Benzin erforderlich sind, um das Fahrzeug auf 30 km/h zu beschleunigen, wird die Energiebilanz einsichtig. Auf diesem Fahrzeugmodell basieren die nun folgenden Betrachtungen. 36 Über die Physik des Aufpralls W [kJ] 150 W [kJ] 150 W [kJ] 150 100 100 100 50 50 50 10 20 30 40 50 60 d [cm] 10 20 30 40 50 60 Fahrzeug 1 d [cm] 10 20 30 40 50 60 Fahrzeug 2 Fahrzeug 3 W [kJ] 150 W [kJ] 150 W [kJ] 150 100 100 100 50 50 50 10 20 30 40 50 60 Fahrzeug 4 d [cm] 10 20 30 40 50 60 Fahrzeug 5 d [cm] d [cm] 10 20 30 40 50 60 d [cm] Fahrzeug 6 Abbildung 17: Energieabbau beim Aufprall 3.2 Der Insasse Das vorgestellte Fahrzeugmodell mit der unverformbaren Fahrgastzelle stellt ein Inertialsystem (Bezugssystem) für den Insassen dar. In diesem System wird nun der Insasse modelliert. Sein Verhalten wird an zwei Eigenschaften betrachtet. Zum einen darf er gewisse Beschleunigungswerte nicht überschreiten, um Kopfverletzungen zu vermeiden. Zum anderen wird seine Bewegung relativ zum Fahrzeug modelliert, um Schlüsse über den besten Zeitpunkt der Luftsackauslösung zu ziehen. 3.2.1 Das Kopfverletzungsrisiko Eine große Gefahr bei einem Unfall sind Kopfverletzungen. Starke Beschleunigungen, insbesondere Schläge, verursachen Hirnblutungen, die tödlich sind oder zu schweren Folgeschäden führen. Um diese Gefahr in Zahlen zu fassen wird das „Head Injury Criterion“ (HIC) verwendet. Es berechnet sich aus der Stärke und der Dauer der Beschleunigung. In der US-Gesetzesvorschrift FMVSS 208 (Federal Motor Vehicle Safety Standards) [15] ist es folgender37 Version vom 30. August 2000 maßen festgelegt: HIC 54 1 t2 t1 t2 t1 a t dt 6 25 t2 t1 (16) In Worten: die durchschnittliche Beschleunigung potenziert mit 2 5 wird mit der Dauer multipliziert. Dabei wird die Beschleunigung in g, also Vielfachen der Erdbeschleunigung, gemessen und die Zeit in Sekunden s. Die Zeitdauer t2 t1 wird in Intervallen betrachtet, die kürzer als 36 ms sind. In der hier verwendeten Schreibweise lautet das Kriterium HIC 74 1 1 1 g t2 t1 t2 t1 a t dt 6 t t 2 1 t2 t1 36 ms 1s 25 (17) Der Wert ist für alle Zeitintervalle t2 t1 36 ms während des Aufpralles zu maximieren und darf nie den kritischen Grenzwert überschreiten. Der Grenzwert ist festgelegt mit 1000. Verwendet man diesen Grenzwert 1000, so lässt sich eine grobe Abschätzung durchführen, welche Geschwindigkeit im Idealfall schadlos für den Insassen abbaubar ist. Die Beschleunigung darf in keinem Zeitintervall von 36 ms mehr als amax 1000 0 036 1 8 2 5 g 60 g betragen. Die gesamte Verzögerungsstrecke beträgt im Höchstfall smax 1 5 m. Sie setzt sich aus der Knautschzone des Fahrzeugs (1 m) und dem „Überlebensraum“ im Innenraum, also der Strecke zwischen Insasse und Lenkrad (50 cm) zusammen. Bestenfalls würde der Passagier über die gesamte Strecke gleichmäßig mit 60 g verzögert. Es ergibt sich die obere Abschätzung: vmax :9 amax smax <; 60 m m 1 5 m 30 s2 s 108 km h (18) Dieser Wert muss als absolute obere Grenze für den überlebbaren Aufprall betrachtet werden. Er setzt voraus, dass die Verzögerung bereits zu Beginn der Kollision einsetzt und gleichmäßig erfolgt. Bei der derzeitigen Technik beginnt die Kollisionserkennung meist erst beim Kontakt des Fahrzeugs mit dem Aufprallobjekt. Um Fehlauslösungen zu verhindern, sollte wenigstens die Information von 10 Abtastungen vorliegen. Dadurch erfolgt die Zündung des Luftsacks frühestens 10 Millisekunden nach 38 Über die Physik des Aufpralls dem Kontakt. Hinzu kommt eine Aufblasdauer des Sacks von etwa 30 ms. Dadurch beginnt die Verzögerung des Insassen erst etwa ta = 40 ms nach dem Kontakt. Bezieht man diese Zeit ta in die Abschätzung der maximalen Aufprallgeschwindigkeit mit ein, so ergibt sich der Zusammenhang: vmax >= amax smax ta vmax (19) Ein ta von 40 ms verringert die maximal abbaubare Geschwindigkeit von 108 km/h auf 73 km/h. Bezogen auf die kinetische Energie ist dies weniger als die Hälfte. Dadurch wird deutlich, welche Sicherheitsreserven durch die verspätete Zündung verschenkt werden, oder vielmehr welcher Sicherheitsgewinn durch eine vorzeitige Auslösung erzielt werden kann. Abbildung 18 zeigt den Zusammenhang zwischen der Auslöseverzögerung ta und der maximal abzufangenden Geschwindigkeit vmax . vmax [km/h] 120 100 80 60 40 20 20 40 60 80 100 t a [ms] Abbildung 18: Maximale Aufprallgeschwindigkeit in Abhängigkeit von ta Leider erfolgt der Geschwindigkeitsabbau meist nicht mit konstanter Verzögerung sondern sehr ungleichmässig. Abbildung 19 zeigt drei mögliche Verzögerungsverläufe eines Kopfes bei einem Frontalaufprall mit 50 km/h. Die erste Kurve zeigt die gleichmäßige Verzögerung. Die anderen beiden stammen aus Messungen mit menschenähnlichen Puppen, sogenannten Dummys. Beim nicht angegurteten Dummy verlagert sich der Kopf fast ungebremst einen Meter nach vorn. Schlägt er dann auf das Lenkrad auf, treten Beschleunigungen von mehreren 100 g auf. Der HIC-Grenzwert wird weit überschritten. In einem modernen PKW mit Gurtstraffer und Luftsack tritt ein Höchstwert von 30 g auf, ist also für einen gesunden Menschen ungefährlich. 39 Version vom 30. August 2000 50 a [g] 40 30 20 10 50 a [g] 40 30 20 s [cm] 10 20 40 60 80 100 Ideal 50 a [g] 40 30 20 s [cm] 10 20 40 60 80 100 s [cm] 20 40 60 80 100 Ohne Gurt und Luftsack Mit Gurt und Luftsack Abbildung 19: Verzögerung eines Dummykopfs Alle Bestrebungen zur Erhöhung der passiven Sicherheit in Kraftfahrzeugen zielen unter anderem darauf ab, die Bewegungsenergie des Insassen mit möglichst kleinen Beschleunigungsspitzen abzubauen. 3.2.2 Vorverlagerung des Insassen Maßgebend für die rechtzeitige Zündung des Prallsacks ist die Vorverlagerung des Insassen. Bei einem Frontaufprall verlagert sich der Kopf unweigerlich in den Entfaltungsbereich des Prallsacks. Der Prallsack muss schon vorher vollständig entfaltet sein. Der Zeitpunkt der spätesten möglichen Zündung hängt ab von der Geschwindigkeit, der Charakteristik der Verformung und dem Abstand des Fahrers zum Lenkrad, bzw. des Beifahrers zum Handschuhfach. Betrachtet man den Insassen als freie ungebremste Masse innerhalb der Fahrgastzelle, so berechnet sich die Vorverlagerung sv durch die Formel: sv t v0 t s t (20) Anmerkung: Bei einem Aufprall ist die Verzögerung der Fahrgastzelle so hoch, dass die Kraft, mit der sich der Fahrer am Lenkrad abstützt, nicht ins Gewicht fällt. Ein Dreipunktgurt mit Gurtstraffer hält zwar den Oberkörper des Insassen weitgehend zurück, der Kopf verlagert sich jedoch die ersten Zentimeter ungebremst nach vorn. Daher ist dieses Modell eine gute Näherung für die anfängliche Bewegung. Bei einer weichen Knautschzone verlagert sich der Insasse langsam nach vorn. Bei einer sehr harten Front verlagert er sich annähernd mit der Aufprallgeschwindigkeit nach vorn. Diese beiden Extrema erlauben eine Eingrenzung 40 Über die Physik des Aufpralls s [cm] 20 s [cm] 20 s [cm] 20 10 10 10 20 40 60 80 100 t [ms] 20 30 km/h Frontal 40 60 80 100 t [ms] 50 km/h Frontal 20 40 60 80 100 t [ms] 70 km/h Frontal Abbildung 20: Vorverlagerung des Insassen der tatsächlichen Bewegung. Abbildung 20 zeigt die Vorverlagerung sv t bei verschiedenen Geschwindigkeiten. Die Verzögerungscharakteristik entspricht den Messwerten des echten Fahrzeugs 6. Die Ursprungsgerade zeigt die Vorverlagerung, hätte das Fahrzeug keine Knautschzone. Parallel dazu verläuft die Gerade, die sich aus der weichsten denkbbaren Knautschzone ergibt. Das bedeutet, dass sich das Fahrzeug ohne Geschwindigkeitsverlust um 65 cm verformt und dann schlagartig zum Stehen kommt. Zwischen diesen beiden Geraden liegt die tatsächliche Kurve aller Fahrzeuge, solange deren Verformung kleiner als 65 cm bleibt. 3.2.3 Zündzeitpunkt Der Prallsack muss vollständig entfaltet sein, wenn der Kopf des Passagiers in die Entfaltungszone eintaucht. Mit der vorhergehenden Abschätzung kann nun auch der Zeitpunkt der spätesten Auslösung eingegrenzt werden. Es sei smax die weitestmögliche Vorverlagerung und dmax die maximale Verformung des Fahrzeugs, hier 65 cm. Der Zeitpunkt t, an dem die maximale Vorverlagerung erreicht wird, liegt im Intervall: smax v0 tmax smax dmax v0 (21) Der Abstand zwischen Entfaltungszone und Insasse vor der Kollision ist unterschiedlich groß. Bei großen Männern in zurückgelehnter Haltung kann er fast 20 cm betragen. Bei kleinen Personen ist er teilweise sehr gering und kann sogar negativ werden. Dass heißt, der Insasse (oder häufiger die Insassin) befindet sich schon vor der Kollision in der Entfaltungszone. Oft geschieht das 41 Version vom 30. August 2000 auch durch Nachvornebeugen des Insassen, beispielsweise wenn sich der Beifahrer einen Schuh bindet. Bei dieser sogenannten „Out-of-Position“-Situation (OOP) muss die Auslösung unterdrückt werden oder der Luftsack mit geringerer Füllung gezündet werden. Die OOP-Erkennung kann mit zusätzlichem technischen Aufwand erfolgen und wird bereits eingesetzt. Für die theoretischen Berechnungen wird von einer maximalen Vorverlagerung von 10 cm, 12,5 cm und 20 cm ausgegangen. Aus den Kurven in Abbildung 20 lassen sich die spätesten Zündzeitpunkte ablesen. Sie sind in Abbildung 21 aufgezählt. v0 30 km/h 50 km/h 70 km/h 10 cm 53 ms 45 ms 38 ms smax 12,5 cm 58 ms 48 ms 40 ms 20 cm 73 ms 54 ms 44 ms Abbildung 21: Späteste Zündzeitpunkte (Fahrzeug 6) Interessant hierbei ist, dass die Größe des Insassen, also die maximale Vorverlagerung, einen verhältnismäßig kleinen Einfluss auf die Auslösezeit hat. Insbesondere gilt das bei stärkeren Unfällen. In den folgenden Kapiteln wird smax 12 5 cm verwendet. Dies ist der Durchschnittswert, der von Fahrzeugherstellern angewandt wird [20]. Abbildung 22 zeigt die Zündzeitpunkte der verschiedenen Knautschzonen in Abhängigkeit der Aufprallgeschwindigkeit v0 . Mehrere Eigenschaften sind zu beobachten. Bei sehr kleinem v0 bis etwa 10 km/h verhält sich die Vorverlagerung wie bei einem unverformbaren Fahrzeug. Die untere Annäherungskurve ist smax v0 . Bei sehr hohen Geschwindigkeiten, hier etwa ab 70 km/h, fällt die Art der Verformung kaum noch ins Gewicht. Die Kurve nähert sich der oberen Kurve smax dmax / v0 an. Eine kleine Kuriosität lässt sich ebenfalls aus dem Schaubild ablesen. Bei Fahrzeug 5 und 6 fällt die Kurve nicht monoton, wie man erwarten könnte. Bei Fahrzeug 6 hat der Luftsack bei 35 km h mehr Zeit zum Aufblasen, als bei 30 km h. Das ist kein Rechenfehler der Simulation. Es ist damit zu 42 Über die Physik des Aufpralls t [ms] 100 t [ms] 100 t [ms] 100 80 80 80 60 60 60 40 40 40 20 20 v0 [km/h] 20 40 60 80 100 v0 [km/h] 20 Fahrzeug 1 40 60 80 20 100 Fahrzeug 2 t [ms] 100 80 80 60 60 60 40 40 40 20 20 40 60 80 Fahrzeug 4 100 60 80 100 t [ms] 100 80 v0 [km/h] 40 Fahrzeug 3 t [ms] 100 20 v0 [km/h] 20 v0 [km/h] 20 40 60 80 Fahrzeug 5 100 20 v0 [km/h] 20 40 60 80 100 Fahrzeug 6 Abbildung 22: Zündzeitpunkte bei verschiedenen Knautschzonen erklären, dass der Geschwindigkeitsabbau nicht proportional zur Energie ist, sondern zu deren Wurzel. Bei höherer Geschwindigkeit wird dadurch bei der Verformung oder dem Bruch der harten Stoßstange weniger Geschwindigkeit abgebaut. Bei den nachfolgenden „Weichteilen“, bei denen die Verzögerung geringer ist, wird die Kabine weniger abgebremst und bewegt sich dadurch zusammen mit dem Insassen nach vorn. Dieser Effekt tritt immer auf, wenn die Kraft während der Verformung nicht monoton zunimmt. Wie man sieht, ist dieser Effekt jedoch sehr gering, bezogen auf das Gesamtverhalten. Ausserdem ist zu beobachten, dass das Gesamtverhalten der Zündzeitpunkte bei allen betrachteten Kraftkennlinien sehr ähnlich ist. Es bietet sich daher an, die Kurven durch einfache Gleichungen anzunähern. Die Kurve des Modells verläuft für kleine Geschwindigkeiten v0 wie smax v0 und schmiegt sich dann asymptotisch an smax dmax / v0 an. Als Annäherung für die Kurve bietet es sich an, einen gewichteten Durchschnitt der beiden Annäherungskurven zu verwenden. Die Gewichtung für die erste Anschmiegkurve kann durch eine Exponentialfunktion mit negativem Exponenten festgelegt 43 Version vom 30. August 2000 werden bλv0 . Die Gewichtung für die Zweite ist entsprechend 1 bλv0 . Die Parameter λ und b werden so bestimmt, dass die quadratische Abweichung zur modellierten Funktion minimal ist. Es ergibt sich für λ 1 vmax und für b 5 1. Als Näherungsformel ergibt sich: tmax v0 b vmax smax v0 v0 1 b vmax smax dmax v0 (22) Ausgehend von dieser Formel lassen sich verschiedene Fahrzeugparameter simulieren. Abbildung 23 zeigt die Zündzeitpunkte für drei verschiedene Fahrzeuge. Das erste steht für einen Kleinwagen mit maximaler Verformungszone von dmax 35 cm. Diese Verformung wird bereits bei vmax 45 km h erreicht. Die zweite Kurve entspricht den Fahrzeugen des bisherigen Modells. Die dritte Kurve simuliert einen großen Wagen mit einer Verformungszone von 1 m. t [ms] 100 t [ms] 100 t [ms] 100 80 80 80 60 60 60 40 40 40 20 20 20 40 60 v0 [km/h] 80 100 smax 12 cm dmax 35 cm vmax 45 km h 20 40 60 v0 [km/h] 80 100 smax 12 cm dmax 65 cm vmax 55 km h 20 20 40 60 v0 [km/h] 80 100 smax 12 cm dmax 100 cm vmax 65 km h Abbildung 23: Annäherung des Zündzeitpunkts Es ist deutlich erkennbar, dass eine längere Fahrzeugfront die Sicherheit sehr stark erhöht. Das vorgestellte Modell lässt nun Folgerungen für die Auslegung der technischen Systeme zu. Sie werden nun kurz erläutert. 44 Über die Physik des Aufpralls 3.3 Folgerungen 3.3.1 Wie sieht die ideale Knautschzone aus? Die ideale Knautschzone ist mehrere Meter lang und verformt sich ausschließlich elastisch. Diese Lösung scheitert leider an den technischen Gegebenheiten. Betrachtet man ein paar einfache Nebenbedingungen, so wird man feststellen: eine ideale Knautschzone gibt es nicht. Das Idealverhalten des Fahrzeugs hängt zum einen von den verwendeten Rückhaltesystemen ab. Fahrzeuge mit Luftsack ohne Kollisionsvorerkennung sollten sich zu Beginn weicher verhalten, damit der Luftsack sich entfalten kann, bevor die Vorverlagerung des Insassen beginnt. Bei einer Vorerkennung kann sich der Luftsack schon vorher entfalten. Die Verzögerung des Insassen sollte dann so früh wie möglich erfolgen. Dies legt eine steifere Verformungszone nahe. Außerdem hängt das Idealverhalten aber auch von der Geschwindigkeit des Aufpralls ab. Man kann die Bauweise so optimieren, dass ein 70 km/hAufprall für den Insassen überlebbar würde. Für einen Unfall mit 35 km/h ist das Verformungsverhalten dann möglicherweise nicht ideal. Das Verletzungsrisiko ist höher als wenn nach diesem Unfalltyp optimiert würde. Zudem gibt es weitere Randbedingungen, die berücksichtigt werden müssen. Beispielsweise sollten schwächere Kollisionen kostengünstig reparierbar sein und nicht zum Totalschaden führen. Grundsätzlich gilt die Faustregel, eine harte Knautschzone ist bei hohen Aufprallgeschwindigkeiten besser, da mehr Energie aufgenommen werden kann, bevor die Fahrgastzelle verformt wird. Eine weiche Knautschzone kann bei leichteren Unfällen den Insassen sanfter abfangen. Das Idealverhalten hängt somit von den Gewichtungen der verschiedenen Situationen ab. 3.3.2 Vorherige Auslösung Die Entfaltung des Luftsacks dauert etwa 30 ms. Addiert man noch 10 ms für die Entscheidung, so dauert die Vorbereitung des Luftsacks etwa 40 ms. Ein 45 Version vom 30. August 2000 Punkt mit der Geschwindigkeit 80 km/h legt in dieser Zeit fast 90 cm zurück. Wird der Prallsack erst zu Beginn des Aufpralls oder sogar erst nach mehreren Millisekunden gezündet, bewegt sich der Insasse ungebremst weiter. Das heisst, bevor die Verzögerung des Insassen durch den Luftsack einsetzt, wurde der größere Teil des Verzögerungsraums bereits vergeudet. Diese Überlegung legt natürlich nahe, den Prallsack schon vorher zu zünden. Soll er so gezündet werden, dass er zu Beginn der Kollision entfaltet ist, entspricht das bei 80 km/h einer Zündung bei einem Abstand zur Mauer von 67 cm. Das dazu notwendige technische System muss also den Raum vor dem Fahrzeug in einem Abstand von etwa 1 m erfassen. Die Möglichkeiten und die Zuverlässigkeit von Systemen, die bereits vor dem Aufprall auslösen, werden derzeit erforscht, sind jedoch noch nicht im Einsatz. 3.3.3 Anmerkung: v-Quadrat In einer Vielzahl von mechanischen Berechnungen geht die Geschwindigkeit quadratisch ein. Die kinetische Energie enthält v-Quadrat ebenso wie der Luftwiderstand, die Länge des Bremsweges und die Kraft, die ein Fahrzeug aus der Kurve treibt. Auch die Schwere von Kollisionen steigt mit dem Quadrat der Geschwindigkeit. Die Berechnungen dieses Kapitels sind teilweise grob, also mit abgeschätzten Daten durchgeführt. Die Länge der Knautschzone ist bei großen Fahrzeugen um die Hälfte länger, als hier angenommen. Auch die Masse hängt vom Beladungszustand und der Fahrzeugausstattung ab. Diese Größen gehen jedoch nur in linearer Form ein. Die Aussagen bezüglich der Geschwindigkeit sind daher wesentlich genauer als die eingehenden Parameter. Eine Frontalkollision mit 70 km/h kann durch die entsprechenden Sicherheitsmaßnahmen für den Insassen überlebbar sein. Bei 140 km/h, also der vierfachen Bewegungsenergie, werden jedoch alle Sicherheitsmaßnahmen scheitern. 3.3.4 Zusammenfassung Die vorgestellte deduktive Vorgehensweise zur Modellierung des Fahrzeugs erlaubt auf rein theoretischem Wege eine Vielzahl von praktischen Berech46 Über die Physik des Aufpralls nungen. Diese stimmen weitgehend mit den Erfahrungswerten überein. Wesentliche Ergebnisse sind: 1. Die Kollisionsdauer ist, abhängig von Fahrzeugtyp und Kollisionsart, sehr unterschiedlich. 2. Die Verzögerung eines Fahrzeugs zu Beginn einer Kollision steht nicht in unmittelbarem Zusammenhang mit der Geschwindigkeit und der Kollisionsart. 3. Die Beschleunigungssignale unterschiedlicher Kollisionsarten können in der Anfangsphase identisch sein. 4. Ab 70 km/h Aufprallgeschwindigkeit versagen derzeitige Rückhaltesysteme. 5. Eine Auslösung des Luftsacks vor Beginn der Kollision kann das Überleben bei 1,4-facher Geschwindigkeit, also bis zur doppelten kinetischen Energie, ermöglichen. 6. Der Einfluss der Größe des Insassen auf die Auslösezeit ist verhältnismäßig klein. Verschiedene Ergebnisse dieses Kapitels werden in den weiteren Untersuchungen verwendet. Im folgenden Kapitel wird das Wunschverhalten des Systems aus diesen Erkenntnissen abgeleitet. Daraus ergibt sich die Bewertungsfunktion, die für die spätere Optimierung des Auslösealgorithmus maßgebend ist. Der verwendete Algorithmus (Kapitel 6) wird ebenfalls aus den Eigenschaften abgeleitet. Für die Robustheitsuntersuchungen (Kapitel 7) werden nach diesem Modell künstliche Kollisionen berechnet, um die Stichprobe zu vergrößern. 47