TET Skript zum Teil 1
Werbung

Vorlesungsskript (Teil 1)
Theoretische Elektrotechnik
(TET)
Prof. Dr.-Ing. Frank Gustrau
(Sommersemester 2016)
7. April 2016
Inhaltsverzeichnis
1 Einleitung
1
2 Physikalische Grundlagen
2.1 Ladungen . . . . . . . . . . . . . . .
2.2 Elektrische Feldstärke . . . . . . . . .
2.3 Elektrische Spannung . . . . . . . . .
2.4 Elektrisches Potential . . . . . . . . .
2.5 Dielektrische Verschiebungsdichte . .
2.6 Dielektrika im elektrischen Feld . . .
2.7 Stromdichte . . . . . . . . . . . . . .
2.8 Magnetische Feldstärke . . . . . . . .
2.9 Lorentz-Kraft . . . . . . . . . . . . .
2.10 Energiedichte im elektromagnetischen
. . .
. . .
. . .
. . .
. . .
. . .
. . .
. . .
. . .
Feld
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2
2
4
5
6
8
9
10
11
13
14
3 Maxwell’sche Gleichungen
3.1 MWG in Differentialform . . . . . . .
3.2 MWG in Integralform . . . . . . . .
3.3 MWG für zeitharmonische Vorgänge
3.4 Randbedingungen . . . . . . . . . . .
3.5 Erhaltungssatz der Ladung . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
18
18
19
20
21
23
.
.
.
.
.
.
.
.
.
.
.
.
26
27
27
28
28
29
30
32
32
33
36
36
38
.
.
.
.
.
.
.
.
.
.
4 Einteilung elektromagnetischer Felder
4.1 Elektrostatische Felder . . . . . . . . . . . . .
4.1.1 Poissongleichung . . . . . . . . . . . .
4.2 Magnetostatische Felder . . . . . . . . . . . .
4.2.1 Magnetisches Vektorpotential . . . . .
4.2.2 Biot-Savart’sches Gesetz . . . . . . . .
4.2.3 Selbst- und Gegeninduktivität . . . . .
4.3 Statisches Strömungsfeld . . . . . . . . . . . .
4.4 Zusammenfassung statische Felder . . . . . . .
4.5 Quasistatische Felder . . . . . . . . . . . . . .
4.6 Quasistationäre Felder mit Stromverdrängung
4.6.1 Anschauliche Beschreibung . . . . . . .
4.6.2 Eindringtiefe . . . . . . . . . . . . . .
i
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
INHALTSVERZEICHNIS
4.7
I
Elektromagnetische Wellen . . .
4.7.1 Die Wellengleichung . .
4.7.2 Homogene ebene Wellen
4.7.3 Der Poynting-Vektor . .
ii
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Anhang
A Mathematische Grundlagen
A.1 Koordinatensysteme . . . . . . . . . . . . . . . . . . . . . . . . .
A.1.1 Kartesisches Koordinatensystem . . . . . . . . . . . . . . .
A.1.2 Zylinderkoordinatensystem . . . . . . . . . . . . . . . . . .
A.1.3 Kugelkoordinatensystem . . . . . . . . . . . . . . . . . . .
A.2 Vektor-Algebra . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2.1 Addition und Subtraktion . . . . . . . . . . . . . . . . . .
A.2.2 Skalar- und Vektorprodukt . . . . . . . . . . . . . . . . . .
A.3 Vektor-Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.3.1 Gradient . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.3.2 Divergenz . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.3.3 Rotation . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.3.4 Quellen- und Wirbelfelder . . . . . . . . . . . . . . . . . .
A.3.5 Laplace-Operator . . . . . . . . . . . . . . . . . . . . . . .
A.4 Auswertung von Integralen in verschiedenen Koordinatensystemen
A.4.1 Linienintegrale . . . . . . . . . . . . . . . . . . . . . . . .
A.4.1.1 Integration in kartesischen Koordinaten . . . . .
A.4.1.2 Integration in Zylinderkoordinaten . . . . . . . .
A.4.1.3 Integration in Kugelkoordinaten . . . . . . . . . .
A.4.2 Flächenintegrale . . . . . . . . . . . . . . . . . . . . . . . .
A.4.2.1 Integration in kartesischen Koordinaten . . . . .
A.4.2.2 Integration in Zylinderkoordinaten . . . . . . . .
A.4.2.3 Integration in Kugelkoordinaten . . . . . . . . . .
A.4.3 Volumenintegrale . . . . . . . . . . . . . . . . . . . . . . .
A.4.3.1 Integration in kartesischen Koordinaten . . . . .
A.4.3.2 Integration in Zylinderkoordinaten . . . . . . . .
A.4.3.3 Integration in Kugelkoordinaten . . . . . . . . . .
A.4.4 Linienintegrale über Vektoren . . . . . . . . . . . . . . . .
A.4.4.1 Vektor in Richtung des Integrationsweges . . . .
A.4.4.2 Vektor senkrecht zum Integrationsweg . . . . . .
40
40
42
43
45
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
B Übungsaufgaben
B.1 Elektrisches Feld einer homogenen Raumladungskugel . . . . . . . . . . .
B.2 Magnetisches Feld eines stromdurchflossenen Leiters . . . . . . . . . . . .
B.3 Magnetisches Feld und Induktivität einer langgestreckten Zylinderspule .
B.4 Magnetisches Feld einer teilweise gefüllten langgestreckten Zylinderspule
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
46
46
46
46
47
48
48
48
50
50
52
52
54
54
56
56
56
57
57
58
58
59
60
60
60
61
61
62
62
63
.
.
.
.
66
66
68
72
74
INHALTSVERZEICHNIS
B.5
B.6
B.7
B.8
B.9
Anwendung des Biot-Savart’schen Gesetzes auf einen Kreisstrom
Paralleldrahtleitung . . . . . . . . . . . . . . . . . . . . . . . . .
Koaxialleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Selbst- und Gegeninduktivität von zwei Zylinderspulen . . . . .
Induktionsgesetz . . . . . . . . . . . . . . . . . . . . . . . . . .
iii
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
75
78
81
84
87
Kapitel 1
Einleitung
Warum soll sich der angehende Ingenieur mit der elektromagnetischen Feldtheorie beschäftigen, wo er doch in vielen Fällen mit den Netzwerkgrößen Spannung, Strom und Impedanz
bestens bedient ist? Ein wichtiger Grund liegt darin, dass insbesondere bei höherfrequenten Anwendungen häufig die feldtheoretische Natur der elektromagnetischen Phänomene
berücksichtigt werden muss und die abgeleiteten Netzwerkgrößen zur Beschreibung allein
nicht ausreichen. Die Kenntnis des Verhaltens der Feldgrößen ebenso wie die Kenntnis des
Verhaltens der Netzwerkgrößen gehört zur Grundausstattung eines Ingenieurs. Es ist entscheidend den Zusammenhang zwischen Netzwerkgrößen (Spannung, Strom, Kapazität,
Induktivität) und den Feldgrößen (elektrisches und magnetisches Feld) zu kennen.
Ziel der Vorlesung ist es daher ein anschauliches und mathematisch fundiertes Verständnis feldtheoretischer Größen und Zusammenhänge zu gewinnen. Im Mittelpunkt stehen hierbei die Maxwell’schen Gleichungen, die die Grundlage der Elektrodynamik bei
makroskopischen Vorgängen darstellen.
Mittlerweile gibt es auf dem Markt eine Reihe von Feldberechnungsprogrammen, die
sich Näherungslösungen der Maxwell’schen Gleichungen durch numerische Verfahren erarbeiten. Ziel dieser Vorlesung ist es auch einen kleinen Einblick in die Möglichkeiten und
Grenzen derartigen moderner Softwarepakete zu geben.
Dieses Skript umfasst den ersten Teil (Elektromagnetische Felder) der Lehrveranstaltung „Theoretische Elektrotechnik“. Zum zweiten Teil liegt ein Lehrbuch vor, das in der
Bibliothek ausgeliehen und heruntergeladen werden kann. (Frank Gustrau. Hochfrequenztechnik, Hanser Verlag, 2013)
1
Kapitel 2
Physikalische Grundlagen
Ziel dieses Kapitels ist die Wiederholung elementarer physikalischer Begriffe, wie sie im allgemeinen für den statischen (d.h. zeitunabhängigen) Fall aus anderen Lehrveranstaltungen
und aus der Schule bereits bekannt sind.
Da es sich um eine Wiederholung handelt, ist die Darstellung bewusst knapp gehalten.
2.1
Ladungen
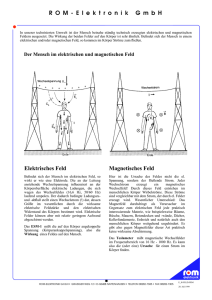
Experimentelle Untersuchungen haben gezeigt, dass es positive und negative Ladungen Q
gibt, die durch ihre Kraftwirkung aufeinander beschrieben werden können (siehe Bild 2.1):
• Ladungen gleichen Vorzeichens stoßen sich ab.
• Ladungen ungleichen Vorzeichens ziehen sich an.
Die kleinste Ladungsmenge ist die Elementarladung
e = 1,602 · 10−19 C .
(2.1)
Die Ladung ist gequantelt, d.h. es treten immer nur ganzzahlige Vielfache dieser Elementarladung auf. Makroskopisch, also bei Vorgängen an denen eine große Zahl von Ladungsträgern beteiligt ist, spielt die Quantelung keine Rolle, d.h. die Ladung wird als kontinuierliche Größe betrachtet. Die Einheit der Ladung [Q] = C = As ist das Coulomb C und
Abbildung 2.1: Anziehung und Abstoßung von Ladungen.
2
KAPITEL 2. PHYSIKALISCHE GRUNDLAGEN
3
Abbildung 2.2: Coulomb’sches Kraftgesetz.
Abbildung 2.3: Superpositionsprinzip bei mehreren Ladungen.
entspricht - wie wir später noch sehen werden - dem Produkt aus den Einheiten Ampere
und Sekunde.
Die Kraft zwischen zwei Ladungen Q1 und Q2 wird durch das Coulomb’sche Kraftgesetz beschrieben:
FC =
Q1 Q2
1
·
4πε0
r2
,
(2.2)
wobei r den Abstand zwischen den beiden Ladungen angibt und εr die Dielektrizitätskonstante ist (siehe Bild 2.2).
ε0 = 8,854 · 10−12
As
Vm
(2.3)
Die Richtung der Kraftwirkung ergibt sich längs der Verbindungslinie. Im Falle gleichnamiger Ladungen ergeben sich abstoßende Kräfte und im Falle ungleichnamiger Ladungen
anziehende Kräfte. Auch bei ungleichen Ladungen Q1 und Q2 ergeben sich entgegengesetzte, betraglich gleiche Kräfte (actio=reactio). Existieren mehr als zwei Ladungen im Raum,
so kann das sog. Superpositionsprinzip verwendet werden. Durch paarweise Auswertung des Coulomb’schen Kraftgesetzes können alle wirkenden Kräfte ermittelt werden.
Die jeweiligen Gesamtkräfte ergeben sich durch Vektoraddition der Einzelkräfte (siehe
Bild 2.3).
KAPITEL 2. PHYSIKALISCHE GRUNDLAGEN
4
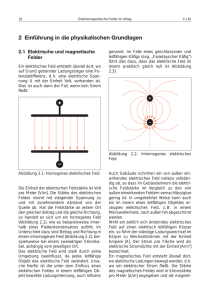
Abbildung 2.4: Elektrische Feldlinien einer Punktladung im Ursprung.
2.2
Elektrische Feldstärke
Bezieht man die auf die Ladung Q2 wirkende Kraft F2 auf die Ladung Q2 selbst, so ergibt
sich die elektrische Feldstärke E1 der Ladung Q1 :
~
~ 1 = F2
E
Q2
.
(2.4)
Mit Hilfe der elektrischen Feldstärke E~1 kann also die Kraftwirkung auf eine zweite La~ 1 und Ladung Q2 miteinander multipliziert
dung Q2 ermittelt werden, indem Feldstärke E
werden. Die Einheit der neuen Größe elektrische Feldstärke ist [E] = N/C = V/m, also
Newton/Coulomb, bzw. Volt/Meter.
Durch die Definition in Gleichung 2.4 ist eine interessante Änderung in der Betrachtungsweise entstanden. Während das Coulomb’sche Kraftgesetz die Kraftwirkung entfernter Ladungen Q1 und Q2 aufeinander beschreibt (Fernwirkung) bedeutet die Einführung
der elektrischen Feldstärke die Annahme eines den gesamten Raum füllenden Vektor~ 1 . Die Kraftwirkung auf eine weitere Ladung Q2 ergibt sich nun aus der Wechfeldes E
~ 1 mit der Ladung Q2 , die sich in dem Feld befindet
selwirkung des elektrischen Feldes E
(Nahwirkung).
~ 1 einer Punktladung Q1 im Ursprung (~r = (0, 0, 0)) ergibt sich aus den
Das Feld E
Gleichungen 2.4 und 2.2 zu
E~1 =
1 Q1
· ~er
4πε0 r2
,
(2.5)
wobei ~er der Einheitsvektor in radialer Richtung in Kugelkoordinaten ist.
~ kann als Feldlinienbild dargestellt werden (siehe Bild 2.4). Die
Das Vektorfeld E
Richtung der Feldlinien stellt dabei die Richtung der elektrischen Feldstärke im Raum
dar (bei der Punktladung im Ursprung ist das Feld in radialer Richtung orientiert). Die
Dichte der elektrischen Feldlinien ist ein Maß für den Betrag der elektrischen Feldstärke,
in Ursprungsnähe ist die Feldstärke größer als weiter vom Ursprung entfernt. Der Betrag
wird durch die Feldlinien allerdings nur qualitativ angegeben.
Existiert mehr als eine Ladung im Raum, so kann - wie bei den Coulomb-Kräften - wieder das Superpositionsprinzip angewendet werden. Die gesamte elektrische Feldstärke
~ ges = E
~1 + E
~ 2.
ergibt sich durch Addition der einzelnen Vektorfelder E
KAPITEL 2. PHYSIKALISCHE GRUNDLAGEN
5
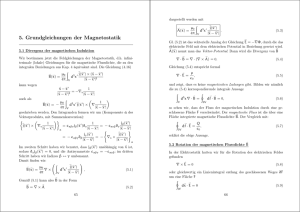
Abbildung 2.5: Elektrische Feldlinien verschiedener Ladungsanordnungen.
Abbildung 2.6: Zur Definition der Spannung.
Feldlinienbilder stellen ein wichtiges anschauliches Instrument zur Bewertung und zum
Verständnis von elektrischen Feldern dar. In Bild 2.5 werden typische Feldlinienbilder
gezeigt: (a) eine positive Punktladung, (b) eine negative Punktladung, (c) zwei entgegengesetzt geladene Punktladungen, (d) zwei gleichnamig geladene Punktladungen und (e)
zwei entgegengesetzt geladene Flächen (Plattenkondensator). Das Feld in einem Plattenkondensator kann zwischen den Platten in guter Näherung als konstant betrachtet werden,
wenn der Abstand zwischen den Platten deutlich kleiner ist als die Querabmessungen.
2.3
Elektrische Spannung
~ von Punkt A nach Punkt B, so wird
Bewegt sich eine Ladung in einem elektrischen Feld E
Arbeit verrichtet.
KAPITEL 2. PHYSIKALISCHE GRUNDLAGEN
ZB
WAB =
F~ · d~s =
A
ZB
~ · d~s = Q
EQ
A
6
ZB
~ · d~s
E
(2.6)
|A {z }
U
Die neue Größe U wird als Spannung bezeichnet und ist unabhängig von der Ladung Q!
WAB
U=
=
Q
ZB
~ · d~s
E
(2.7)
A
Die Einheit der Spannung ist [U ] = Nm/C = V(Volt). Aus der Definition der Spannung
~ so verschwinfolgt: Ist das Wegelement d~s stets senkrecht zur elektrischen Feldstärke E,
~
det das Skalarprodukt E · d~s. Bewegt man sich also stets senkrecht zu den elektrische
Feldlinien, so wird an der Ladung keine Arbeit verrichtet, folglich ist die Spannung zwischen Anfangs- und Endpunkt gleich Null. Man bewegt sich dann auf einer sogenannten
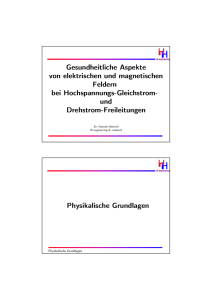
Äquipotentialfläche. Bild 2.7 zeigt zwei Beispiele für Äquipotentialflächen: (a) bei einer
Punktladung sind die Äquipotentialflächen konzentrische Kugelschalen um den Ursprung,
(b) beim Plattenkondensator sind die Äquipotentialflächen horizontale Ebenen. (Im elek-
Abbildung 2.7: Äquipotentiallinien bei der (a) Punktladung und beim (b) Plattenkondensator.
trostatischen Feld ist die Spannung unabhängig vom gewählten Weg und allein bestimmt
durch Anfangs- und Endpunkt.)
2.4
Elektrisches Potential
Das elektrische Potential φ gibt die Spannung zwischen einem Aufpunkt ~r und einem
Referenzpunkt ~r0 an.
Z~r0
φ~r0 =
~
r
~ · d~s = −
E
Z~r
~ · d~s
E
(2.8)
~
r0
Die Einheit ist wie bei der Spannung das Volt: [φ] = V. Im Gegensatz zur Spannung,
die stets zwischen zwei Punkten definiert ist, handelt es sich beim Potential um eine skalare Funktion, die jedem Raumpunkt einen skalaren Wert zuweist (Skalarfeld).
KAPITEL 2. PHYSIKALISCHE GRUNDLAGEN
7
Je nach gewähltem Referenzpunkt ergeben sich verschiedene Potentialfunktionen. Zwei
Potentialfunktioen unterscheiden sich untereinander nur durch eine additive Konstante
(φ~r1 − φ~r2 = const.).
Die Spannung zwischen zwei Punkten A und B kann als Potentialdifferenz dargestellt
werden.
UAB = φ(~rA ) − φ(~rB )
(2.9)
~ kann aus dem Potential φ nach folgender Formel berechnet
Die elektrische Feldstärke E
werden:
~
E = −gradφ =
∂φ
∂φ
∂φ
~ex +
~ey +
~ez
−
∂x
∂y
∂z
.
(2.10)
Da sich die elektrische Feldstärke aus Ableitungen der Potentialfunktion ergibt, spielt die
Wahl des Referenzpunktes bei der Potentialfunktion keine Rolle. Die additive Konstante
zwischen verschiedenen Potentialfunktionen verschwindet beim Ableiten. Die elektrische
Feldstärke ist also eindeutig und unabhängig vom Referenzpunkt der Potentialfunktion.
Das Potential kann also ebenso gut zur Beschreibung elektrischer Felder herangezogen
werden wie die elektrische Feldstärke: Der Vorteil liegt in der skalaren Natur des Potentials
gegenüber dem Vektorfeld der elektrischen Feldstärke. (Skalarfeld: ein Wert pro Raumpunkt reicht zur Beschreibung; Vektorfeld: drei Komponenten erforderlich.) Gültigkeitsbereich: Das Konzept eines skalaren elektrischen Potentials trägt nur bei Quellenfeldern:
Ruhende elektrische Ladungen als Quellen des zeitunabhängigen elektrischen Feldes →
Elektrostatik.)
Beispiel
Gegeben sei der Plattenkondensator in Bild 2.8. Gesucht sei das skalare Potentialfeld
φ(~r) zwischen den Platten. Der Plattenabstand betrage d = 1 mm und die elektrische
Abbildung 2.8: Plattenkondensator: Berechnung der Potentialfunktion φ.
~ 0 = −1 kV ~ey . Die Spannung zwischen den Platten
Feldstärke zwischen den Platten sei E
m
beträgt dann
ZB
UAB =
A
~ · d~s = E0 d = 1 V .
E
(2.11)
KAPITEL 2. PHYSIKALISCHE GRUNDLAGEN
8
Wird Punkt B als Referenzpunkt für das Potential gewählt, so kann jedem Raumpunkt
ein bestimmter Potentialwert zugeordnet werden.
~ ⊥ d~s das Potential Null.
• Liegt ~r auf der unteren Platte, so ist wegen E
• Ebenso liegen alle Punkte der oberen
R B Platte auf einem Potential. Das Potential der
~ · d~s = UAB = 1 V
oberen Platte beträgt φB (A) = A E
• Berechnung
des Potentials zwischen den Platten in Abhängigkeit von y: φB (y) =
R y=0
~
E · d~s = E0 y |y0 = E0 y. Flächen gleichen Potentials sind horizontale Ebenen.
y
Rückrechnung auf die elektrische Feldstärke ergibt:
~ = −gradφ = − ∂φ ~ex + ∂φ ~ey + ∂φ ~ez = −E0~ey
E
∂x
∂y
∂z
|{z}
|{z}
|{z}
=0
=E0
.
(2.12)
=0
Beispiel (Ende)
2.5
Dielektrische Verschiebungsdichte
~ (auch: elektrische Flussdichte) entspricht Die dielektrische Verschiebungsdichte D
~
bis auf einen Faktor - der elektrischen Feldstärke E
~ = ε0 εr E
~
D
Die Einheit der dielektrischen Verschiebungsdichte ist [D] = As/m2 . Die Größe εr
relative Dielektrizitätszahl (dimensionslos) und eine Stoffeigenschaft.
Eine besondere Bedeutung kommt der dielektrischen Verschiebungsdichte
Gauß’schen Satz zu:
ZZ
ZZZ
~
~
D · dA =
ρ dv = Q .
A(V )
(2.13)
ist die
~ im
D
(2.14)
V
~ über eine geschlossene Hüllfläche A(V ), so
Integriert man die diel. Verschiebungsdichte D
erhält man die im Volumen V eingeschlossene Ladungsmenge Q.
KAPITEL 2. PHYSIKALISCHE GRUNDLAGEN
9
Abbildung 2.9: Veranschaulichung der Bedeutung des Gauß’schen Satzes.
Abbildung 2.10: Dielektrikum im elektrischen Feld eines Plattenkondensators.
2.6
Dielektrika im elektrischen Feld
Die eigentliche Bedeutung der dielektrischen Verschiebungsdichte wird deutlich, wenn Materie vom elektrischen Feld durchsetzt wird. Experimentell stellt man folgendes fest: Wird
in den Raum zwischen den geladenen Platten eines Plattenkondensators ein Isoliermaterial (Dielektrikum) gebracht, so zeigt sich, dass die Spannung zwischen den Platten
gegenüber dem Fall ohne Isoliermaterial verringert ist. Entfernt man das Isoliermaterial
wieder, so erhält man den ursprünglichen Spannungswert. Durch Einbringen des Isolators
in das elektrische Feld E0 verschieben sich die Ladungen im Isolator, so dass ein Gegenfeld
~ p entsteht. Der Effekt wird als Polarisation bezeichnet. In der Materie herrscht ein
E
abgeschwächtes Feld
Em = E0 − Ep < E0
.
(2.15)
KAPITEL 2. PHYSIKALISCHE GRUNDLAGEN
10
Aufgrund der verringerten Feldstärke ist auch die Spannung reduziert:
ZB
Um =
~ m · d~s < U0
E
.
(2.16)
A
Das Verhältnis von E0 zu Em heißt relative Dielektrizitätszahl εr .
εr =
U0
E0
=
Em
Um
(2.17)
~ m gegenüber E
~ 0 reduziert, die dielektrische VerschiebungsAchtung: Im Dielektrikum ist E
dichte bleibt jedoch unverändert!
Dm = ε0 εr Em = ε0 εr
E0
= ε0 E0 = D0
εr
(2.18)
An dieser Stelle sollen zwei wichtige Begriffe auseinander gehalten werden:
Influenz : Verschiebung von freien Ladungsträgern in einem Leiter infolge eines äußeren
elektrischen Feldes.
Polarisation : Ausrichtung von Ladungen in einem Isolator durch einen der beiden folgenden Mechanismen: (a) vorhandene Dipole (polare Materie) orientieren sich parallel zum äußeren Feld oder (b) bei nicht-polarer Materie fallen durch entgegengesetzte
Kraftwirkung auf Kern und Hülle die Ladungsschwerpunkte nicht mehr zusammen,
so dass Dipole entstehen (siehe Bild 2.11).
Abbildung 2.11: Entstehung eines Dipols im äußeren elektrischen Feld bei nicht-polarer
Materie.
2.7
Stromdichte
In den bisherigen Kapiteln wurden ruhende Ladungen und die von ihnen erzeugten elektrischen Felder besprochen. Nun sollen Ladungen in Bewegung untersucht werden; wir
werden sehen, dass es dann zur Entstehung von magnetischen Feldern kommt. Zunächst
aber müssen wir wichtige Begriffe einführen, die die Bewegung von Ladungen beschreiben.
Die Stromstärke I gibt die Ladungsmenge ∆Q an, die in einem Zeitintervall ∆t durch
eine Querschnittsfläche A fließt.
KAPITEL 2. PHYSIKALISCHE GRUNDLAGEN
11
Abbildung 2.12: Zur Definition der Stromstärke I.
I=
∆Q
∆t
.
(2.19)
Die Stromstärke ist eine skalare, vorzeichenbehaftete Größe. Als positive Richtung des
Stroms wird die Bewegungsrichtung der positiven Ladungsträger definiert. Einheit der
Stromstärke ist das Ampere [I] = A.
Die Stromdichte gibt die Stromstärke I pro Querschnittsfläche A an, also
J=
I
A
.
(2.20)
Die Einheit ist [J] = A/m2 .
Die Stromdichte ist eine lokale Größe (Vektorfeld) im Gegensatz zur Stromstärke, die
ein integrale Größe ist und immer in Beziehung zu einer Bezugsfläche steht. Allgemein gilt
zwischen der Stromstärke I und der Stromdichte J~ folgender Zusammenhang:
ZZ
I=
~
J~ · dA
.
(2.21)
A
Die Stromstärke ergibt sich also durch Integration der Stromdichte über die Querschnittsfläche.
Im leitfähigen Material ist die Stromdichte über folgende Formel mit der elektrischen
Feldstärke verknüpft:
~
J~ = σ E
.
(2.22)
Die Größe σ ist die elektrische Leitfähigkeit in der Einheit [σ] = S/m.
2.8
Magnetische Feldstärke
Historisch wurde schon frühzeitig beobachten, dass sich einige Materialien - je nach Orientierung zueinander - anzogen bzw. abstießen. Diese Materialien nannte man nach dem
Ort ihrer Entdeckung Magnete.
Man kann sich die Kraftwirkung solcher Magnete aufeinander veranschaulichen, indem
man diesen Magneten zwei Pole (Nordpol und Südpol) zuordnet und sich magnetische
Feldlinien vorstellt, die aus dem Nordpol austreten und im Südpol wieder in den Magneten
KAPITEL 2. PHYSIKALISCHE GRUNDLAGEN
12
Abbildung 2.13: Magnet und magnetische Feldlinien.
eintreten. Zerbricht man einen Magneten, so stellt man fest, dass die Bruchstücke selbst
wieder Nord- und Südpol besitzen. Es gibt keine isolierten Nord- bzw. Südpole. Dies ist
Folge des Umstandes, dass magnetische Feldlinien immer geschlossen sind.
Wichtige Größen zur Beschreibung magnetischer Felder sind die magnetische Feldstärke H in der Einheit [H] = A/m und die magnetische Flussdichte B (auch magnetische Induktion) in der Einheit [B] = 1 Vs/m2 = 1 T = 1 Tesla. Die Größen sind über
folgende Beziehung miteinander verbunden:
~ =
B
~
µ0 µr H
,
(2.23)
mit der Permeabilitätskonstante
µ0 = 1,2566 · 10−6
Vs
Am
(2.24)
und der relativen Permeabilitätszahl µr .
Im Rahmen der Vorlesung wollen wir uns nicht mit Permanentmagneten beschäftigen,
sondern allein mit technisch erzeugten magnetischen Feldern. Man stellt fest, dass magnetische Felder in der Nähe von Strömen auftreten. Ströme - also bewegte Ladungen - sind
die Ursachen von magnetischen Feldern. Dies gilt übrigens auch für Permanentmagnete:
Hier sind es Kreisströme auf atomarer Ebene.
Als einfaches Beispiel, auf das wir später detaillierter zurückkommen wollen, betrachten
wir einen langen stromdurchflossenen Linienleiter. Dieser ist von kreisförmigen magnetischen Feldlinien umgeben (siehe Bild 2.14). Die Richtung des magnetischen Feldes ergibt
sich durch die Rechte-Hand-Regel. Wird der Linienleiter mit der rechten Hand umgriffen
und zeigt der Daumen dabei in Richtung des Stromes, so geben die anderen Finger den
Umlaufsinn des magnetischen Feldes an.
KAPITEL 2. PHYSIKALISCHE GRUNDLAGEN
13
Abbildung 2.14: Magnetische Feldlinien um einen langen gleichstromdurchflossenen Linienleiter.
2.9
Lorentz-Kraft
Wir haben gesehen, dass Ströme magnetische Felder verursachen. Aber üben magnetische
Felder - ähnlich wie elektrische Felder - auch Kräfte auf Ladungen aus?
Zunächst einmal erkennt man, dass sich zwischen einer ruhenden Ladung und einem
magnetischen Feld keine Wechselwirkung feststellen lässt. Bewegt sich die Ladung jedoch,
so erfährt sie die Lorentz-Kraft FL .
~
FL = ~
Q ~v × B
.
(2.25)
Abbildung 2.15: Lorentzkraft auf eine bewegte Ladung.
Die Richtung der Kraft ergibt sich nach dem Kreuzprodukt senkrecht zum Magnetfeld
und senkrecht zur Geschwindigkeit (siehe Bild 2.15).
Existieren gleichzeitig ein magnetisches und ein elektrisches Feld, so überlagern sich
Coulombkraft FC und Lorentzkraft FL .
~ + Q ~v × B
~
F~ = QE
.
(2.26)
Beispiel
KAPITEL 2. PHYSIKALISCHE GRUNDLAGEN
14
~ senkrecht zueinander,
Stehen Geschwindigkeitsvektor ~v und magnetische Induktion B
so ergibt sich eine Kreisbewegung des Teilchens. Die Lorentzkraft wirkt als Zentripetalkraft:
F~L = F~Z
v2
QvB = m
r
(2.27)
(2.28)
Hieraus lässt sich der Radius der Kreisbahn berechnen
r =
mv
QB
.
(2.29)
Abbildung 2.16: Kreisbahn eines geladenen Teilchens im magnetischen Feld.
Beispiel (Ende)
2.10
Energiedichte im elektromagnetischen Feld
In elektrischen und magnetischen Felder ist Energie gespeichert. Diese Energien stehen in
Zusammenhang mit Netzwerkgrößen, z.B. der Kapazität C eines Kondensators und der
Induktivität L einer Spule. Die Energiedichte des elektrischen Feldes ist in einem
isotropen, linearen Medium gegeben durch
1~ ~
1 ~ 2
we = D
E = ε E
2
2
.
(2.30)
KAPITEL 2. PHYSIKALISCHE GRUNDLAGEN
15
Die Energiedichte des magnetischen Feldes ist in einem isotropen, linearen Medium
gegeben durch
1~ ~
wm = H
B=
2 1 ~ 2
µ H 2
.
(2.31)
Zur Erinnerung: Ein Medium ist isotrop, wenn das Material keine Richtungsabhängigkeit
aufweist (die Größen ε, µ, σ sind dann skalare Größen). Ein Medium ist linear, wenn die
~ und H
~ sind.
Größen ε, µ, σ keine Funktion der Feldgrößen E
Die in einem elektrischen Feld gespeicherte Energie beträgt dann:
ZZZ
we dv .
(2.32)
We =
V
Analog gilt für das magnetischen Feld:
ZZZ
Wm =
wm dv
.
(2.33)
V
Beispiel
Gegeben ist ein luftgefüllter Plattenkondensator (Plattenfläche A, Plattenabstand d)
~ Die im elektrischen Feld gespeinach Bild 2.17 mit einem homogenen elektrischen Feld E.
Abbildung 2.17: Plattenkondensator.
cherte Energie ist
ZZZ
We =
Z VZ Z
=
we dv
(2.34)
1
ε0 E02 dv
2
(2.35)
V
=
1
ε0 E02 A
·d
|{z}
2
V
(2.36)
KAPITEL 2. PHYSIKALISCHE GRUNDLAGEN
16
Mit der Spannung zwischen den Platten
Z2
~ · d~s = Ed
E
(2.37)
A
1
· ε0 · E02 d2
2 |{z}
d | {z }
U2
(2.38)
U =
1
ergibt sich
We =
C
1
=
CU 2
2
.
(2.39)
Die Größe C ist die Kapazität in der Einheit [C] = AS/V = F (Farad). Die Kapazität
beschreibt die (auf einer Platte) gespeicherte Ladung bezogen auf die anliegende Spannung.
C=
Q
U
(2.40)
Bei einem Plattenkondensator gilt also unter der Annahme eines homogenen Feldes,
das sich auf den Zwischenraum zwischen den Platten beschränkt:
C = ε0
A
d
.
(2.41)
Diese Formel kann auch mit dem Gauß’schen Satz (3. Maxwell’schen Gleichung) bestimmt
werden. Legt man - wie in Bild 2.18 gezeigt - eine geschlossene Hüllfläche um eine Platte,
so erhält man die eingeschlossene Ladungsmenge Q. Aufgrund des Umstandes, dass ein
homogenes elektrischen Feld nur zwischen den Platten existiert, ist das Oberflächenintegral
einfach auszuwerten.
Abbildung 2.18: Plattenkondensator.
ZZ
~ · dA
~ = ε0 EA
Q = D
(2.42)
A(V )
Mit der Spannung U = Ed ergibt sich so:
C =
Q
ε0 EA
A
=
= ε0
U
Ed
d
.
(2.43)
KAPITEL 2. PHYSIKALISCHE GRUNDLAGEN
17
In der Übungsveranstaltung werden wir sehen, auf welche Weise die Induktivität L mit
der magnetischen Feldenergie Wm zusammenhängt (siehe Kapitel B.3) auf Seite 72.
Beispiel (Ende)
Kapitel 3
Maxwell’sche Gleichungen
Die Maxwell’schen Gleichungen (MWG) liefern eine Beschreibung der makroskopischen
elektromagnetischen Phänomene, also des Verhaltens von elektrischen und magnetischen
Feldern und die Wechselwirkung mit der Materie.
In diesen Gleichungen sind die auftretenden Feldgrößen Funktionen des Ortes ~r und der
Zeit t. Diese Feldgrößen müssen neben den MWG noch Rand- und Anfangsbedingungen
genügen, so dass sich insgesamt ein Anfangs-Randwert-Problem ergibt.
Die Maxwell’schen Gleichungen können in differentieller und in integraler Form angegeben werden. In den nachfolgenden beiden Unterkapiteln wollen wir uns die Gleichungen
einmal ansehen und ihre anschauliche Bedeutung erfassen.
3.1
MWG in Differentialform
Die erste Maxwell’sche Gleichung in Differentialform lautet:
~ = J~ +
rotH
~
∂D
∂t
(1. MWG) .
(3.1)
Anschaulich interpretiert sagt diese Gleichung, dass die elektrische Stromdichte J~ und die
~
Verschiebungsstromdichte ∂ D/∂t
die Ursachen des magnetischen Wirbelfeldes sind.
Die zweite Maxwell’sche Gleichung in Differentialform lautet:
~ =−
rotE
~
∂B
∂t
(2. MWG) .
(3.2)
Anschaulich interpretiert sagt diese Gleichung, dass die zeitliche Änderung der magneti~
schen Flussdichte ∂ B/∂t
die Ursache des elektrischen Wirbelfeldes ist.
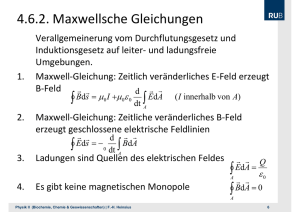
Die dritte Maxwell’sche Gleichung in Differentialform lautet:
~ =ρ
divD
(3. MWG) .
(3.3)
Anschaulich interpretiert sagt diese Gleichung, dass die Raumladungsdichte ρ die Ursache
des elektrischen Quellenfeldes ist.
18
KAPITEL 3. MAXWELL’SCHE GLEICHUNGEN
19
Abbildung 3.1: (a) Durchflutungsgesetz und (b) Induktionsgesetz.
Die vierte Maxwell’sche Gleichung in Differentialform lautet:
~ =0
divB
(4. MWG) .
(3.4)
~ immer
Anschaulich interpretiert sagt diese Gleichung, dass die magnetische Flussdichte B
quellenfrei ist.
3.2
MWG in Integralform
Die erste Maxwell’sche Gleichung in Integralform lautet:
!
I
ZZ
~
∂
D
~
~ · d~s =
J~ +
· dA
H
∂t
.
(3.5)
A
C(A)
Die Gleichung wird auch als Durchflutungsgesetz, bzw. als Ampere’sches Gesetz bezeichnet. Die anschauliche Bedeutung stellt Bild 3.1a dar: Das Umlaufintegral des magne~ um die Fläche A entspricht dem durch die Fläche tretenden Gesamtstrom
tischen Feldes H
~ und über die VerschiebungsstromdichIges (Integral über die Leitungsstromdichte J~ = σ E
~
te ∂ D/∂t).
!
ZZ
~
∂
D
~ .
Iges =
J~ +
· dA
(3.6)
∂t
A
Die zweite Maxwell’sche Gleichung in Integralform lautet:
I
~ · d~s = − d
E
dt
ZZ
~ · dA
~ allgemein
B
A
C(A)
ZZ
= −
A
~
∂B
~ für ruhende Medien
· dA
∂t
.
(3.7)
KAPITEL 3. MAXWELL’SCHE GLEICHUNGEN
20
Die Gleichung wird auch als Induktionsgesetz, bzw. als Faraday’sches Gesetz bezeichnet.
(In dieser Vorlesung wollen wir uns auf ruhende Medien beschränken.) Die anschauliche
~ um die
Bedeutung stellt Bild 3.1b dar: Das Umlaufintegral des elektrischen Feldes E
Fläche A entspricht dem Flächenintegral über die zeitliche Änderung der magnetischen
~
Flussdichte B.
Die dritte Maxwell’sche Gleichung in Integralform lautet:
ZZ
ZZZ
~ · dA
~=
D
ρ dv = Q
.
(3.8)
V
A(V )
Die Gleichung wird auch als Gauß’sches Gesetz des elektrischen Feldes bezeichnet.
~ über die geschlossene Hüllfläche
Das Integral der dielektrischen Verschiebungsdichte D
A(V ) liefert die gesamte im Volumen eingeschlossene Ladungsmenge Q. Bild 2.9 auf Seite
9 zeigt eine Darstellung zur Interpretation.
Die vierte Maxwell’sche Gleichung in Integralform lautet:
ZZ
~ · dA
~=0
B
.
(3.9)
A(V )
Die Gleichung wird auch als Gauß’sches Gesetz des magnetischen Feldes bezeich~ über die geschlossene Hüllfläche A(V )
net. Das Integral der magnetische Flussdichte B
verschwindet. Die Summe der eintretenden und austretenden magnetischen Feldlinien ist
also gleich.
~
Das Flächenintegral über die magnetische Flussdichte B
ZZ
~ · df~
Ψm =
B
(3.10)
A
wird als magnetischer Fluss bezeichnet, ebenso wie das Flächenintegral über die elektrische
~
Flussdichte D
ZZ
~ · df~
Ψe =
D
(3.11)
A
als elektrischer Fluss bezeichnet wird.
3.3
MWG für zeitharmonische Vorgänge
In der Technik sind häufig monofrequente (zeitharmonische) Vorgänge von Bedeutung.
Die Feldgrößen haben dann eine sinusförmige Zeitabhängigkeit und lassen sich wie in der
komplexen Wechselstromrechnung durch Phasoren beschreiben.
KAPITEL 3. MAXWELL’SCHE GLEICHUNGEN
21
In komplexer Schreibweise ergibt sich dann folgender Zusammenhang:
~ (~r, t) = E
~ 0 (~r) · cos (ωt + ϕ0 )
E
n
o
~ 0 (~r) · cos (ωt + ϕ0 ) + j E
~ 0 · sin (ωt + ϕ0 )
= Re E
n
o
~ 0 (~r) · ej(ωt+ϕ0 )
= Re E
~ (~r) · ejϕ0 ejωt }
= Re{E
}
| 0 {z
(3.12)
(3.13)
(3.14)
(3.15)
~ (~
E
0 r)
~ 0 (~r) bezeichnet die komplexe Amplitude (Phasor) und ist nur
Die unterstrichene Größe E
noch eine Funktion des Ortes. Somit ist die explizite Zeitabhängigkeit verschwunden. Soll
aus einem bekannten Phasor die physikalische, orts- und zeitabhängige Größe ermittelt
werden, so muss der obige Weg umgekehrt werden, d.h. der Phasor muss mit der komplexen Exponentialfunktion multipliziert und vom Ergebnis der Realteil gebildet werden. Im
weiteren Verlauf der Vorlesung wollen wir komplexe Größen nicht gesondert kennzeichnen
und verzichten daher im weiteren auf den Unterstrich.
Welchen Vorteil hat nun die Einführung der komplexen Rechnung? Zunächst einmal
entfällt die Zeitvariable t und es verbleiben nur die drei Ortsvariablen. Weiterhin vereinfacht sich die zeitliche Ableitung, aus ihr wird ein Faktor, denn
∂ jωt
e
= jωejωt
∂t
,
(3.16)
also wird
∂
→ jω
∂t
.
(3.17)
Insgesamt ergibt sich nun folgende Form für die Maxwell’schen Gleichungen:
~ = J~ + jω D
~ = σE
~ + jωε0 εr E
~ = (σ + jωε0 εr ) E
~
rotH
~ = −jω B
~
rotE
~ = ρ
divD
(3.18)
~ = 0
divB
(3.21)
(3.19)
(3.20)
Bitte beachten Sie, dass die auftauchenden Feldgrößen in diesen Gleichungen Phasoren
sind!
3.4
Randbedingungen
Wie in den vorangegangenen Unterkapiteln gezeigt, müssen die elektromagnetischen Feldgrößen die Maxwell’schen Gleichungen erfüllen. An Materialgrenzen müssen die Feldgrößen
zusätzlich bestimmten Stetigkeitsbedingungen genügen.
KAPITEL 3. MAXWELL’SCHE GLEICHUNGEN
22
~ und B
~ sind stetig:
Die Normalkomponenten von D
D1n = D2n
B1n = B2n
.
(3.22)
~ und H
~ sind stetig:
Die tangentialen Komponenten von E
E1t = E2t
H1t = H2t
.
(3.23)
Aus diesen Stetigkeitsbedingungen können die Beziehungen für die anderen Komponenten abgeleitet werden. Aus der Stetigkeitsbedingung D1n = D2n und den Materialbeziehungen ε0 εr1 E1n = ε0 εr2 E2n folgt
E1n =
εr2
E2n
εr1
.
(3.24)
Aus der Stetigkeitsbedingung B1n = B2n und den Materialbeziehungen µ0 µr1 H1n =
µ0 µr2 H2n folgt
H1n =
µr2
H2n
µr1
.
D1t
ε0 εr1
=
Aus den Stetigkeitsbedingungen E1t = E2t und
D1t =
εr1
D2t
εr2
Aus den Stetigkeitsbedingungen H1t = H2t und
B1t =
(3.25)
D2t
ε0 εr2
folgt
.
B1t
µ0 µr1
µr1
B2t
µr2
=
.
(3.26)
B2t
µ0 µr2
folgt
(3.27)
Die Zusammenhänge werden in Bild 3.2 grafisch dargestellt. Man erkennt, dass die Vek~ 1 und D
~ 1 sowie die Vektoren E
~ 2 und D
~ 2 vor und nach der Grenzschicht jeweils in
toren E
~ und die die
die gleiche Richtung weisen. Gleiches gilt für die magnetische Flussdichte B
~
magnetische Feldstärke H.
Sonderfälle:
An einer Grenzfläche mit einer Oberflächenladung σF (mit der Einheit [σF ] = C/m2 )
gilt
D1n − D2n = σF
.
(3.28)
KAPITEL 3. MAXWELL’SCHE GLEICHUNGEN
23
Abbildung 3.2: Randbedingungen für (a) die dielektrische Verschiebungsdichte und (b)
das elektrische Feld.
Abbildung 3.3: (a) Knotenregel der Netzwerktheorie (b) analoge Aussage in der Feldtheorie.
Falls Oberflächenladungen existieren, so springt die Normalenkomponente um die Oberflächenladungsdichte σF .
An einer Grenzfläche mit einer Flächenstromdichte JF (mit der Einheit [JF ] = A/m)
gilt
H1t − H2t = JF
.
(3.29)
Falls eine Oberflächenstromdichte existiert, so springt die Normalenkomponente um die
Oberflächenstromdichte JF .
3.5
Erhaltungssatz der Ladung
Aus der Netzwerktheorie ist die Knotenregel bekannt, nach der die Summe aller auf einen
Knoten zulaufenden Ströme Ii verschwindet (siehe Bild 3.3a):
N
X
Ii = 0 .
(3.30)
i=1
In der Feldtheorie gilt analog, dass das Integral über alle in ein Volumen eindringenden
KAPITEL 3. MAXWELL’SCHE GLEICHUNGEN
24
Abbildung 3.4: Übergang einer Fläche mit endlicher Randkurve zu einer geschlossenen
Hüllfläche mit verschwindender Randkurve.
Stromdichten verschwindet. Bild 3.3b zeigt den Sachverhalt.
ZZ ~ = 0
J~L + J~V
·dA
| {z }
A(V )
(3.31)
wahre Stromdichte
Bei der Stromdichte muss dabei die wahre Stromdichte betrachtet werden, also sowohl die
Leitungsstromdichte JL als auch die Verschiebungsstromdichte JV :
~
J~L = σ E
~
∂D
J~V =
∂t
Leitungsstromdichte
(3.32)
Verschiebungsstromdichte
(3.33)
Gleichung 3.31 kann aus der 1. Maxwell’schen Gleichung abgeleitet werden, wenn in
der MWG die Randkurve so lange verkleinert wird, bis sich ein Volumen mit einer geschlossenen Oberfläche ergibt (siehe Bild 3.4).
Aus Gleichung 3.31 lässt sich mit ein paar Umformungen eine interessante Aussage
gewinnen. Zunächst einmal spalten wir das Integral in zwei Integrale auf:
ZZ
ZZ
~
~
~
JL · dA = − J~V · dA
(3.34)
A(V )
A(V )
ZZ ~
∂D
~
= −
· dA
∂t
A(V )
ZZ
d
~ · dA
~
= −
D
dt
A(V )
| {z }
=Q
= −
(3.35)
(3.36)
(3. MWG)
dQ
dt
(3.37)
Wir erhalten also schließlich:
ZZ
~ = − dQ
J~L · dA
dt
A(V )
.
(3.38)
KAPITEL 3. MAXWELL’SCHE GLEICHUNGEN
25
Diese Gleichung ist das Gesetz von der Erhaltung der Ladung. In Worten besagt
diese Gleichung: Wenn die Ladung im Volumen abnimmt (dQ/dt < 0), dann resultiert
daraus (aufgrund des negativen Vorzeichens) ein positiver Leitungsstrom durch die Fläche
~ ist bei einem geschlossenen Volumen immer nach
nach außen (die Flächennormale dA
außen orientiert).
Kapitel 4
Einteilung elektromagnetischer Felder
Elektromagnetische Felder stellen Lösungen der Maxwell’schen Gleichungen mit entsprechenden Rand- und Anfangsbedingungen dar. Je nach Anwendungsfall können sich die
Maxwell’schen Gleichungen stark vereinfachen. Insgesamt hat sich folgende Einteilung als
zweckmäßig erwiesen.
a) Zeitlich konstante Felder (∂/∂t = 0)
a1) Elektrostatische Felder
a2) Magnetostatische Felder
a3) Statische Strömungsfelder (Gleichstrom)
b) Zeitlich veränderliche Felder (∂/∂t 6= 0)
b1) Langsam veränderliche Felder
→ Quasistatische elektrische Felder
→ Quasistatische magnetische Felder
→ Quasistatische Strömungsfelder
b2) Schnell veränderliche Felder
→ Quasistationäre Felder mit Stromverdrängung (Skineffekt)
→ Elektromagnetische Wellen (Wellenausbreitung im freien Raum)
Im folgenden wollen wir uns mit diesen Feldtypen auseinandersetzen und dabei verschiedene Lösungsstrategien kennenlernen. Auch wenn dem Ingenieur heutzutage leistungsstarke
Simulationsprogramme zur Feldberechung zur Verfügung stehen, muss er die grundlegenden analytischen Methoden kennen, um die Ergebnisse der numerischen Verfahren beurteilen zu können.
26
KAPITEL 4. EINTEILUNG ELEKTROMAGNETISCHER FELDER
4.1
27
Elektrostatische Felder
Aufgrund von ruhenden Ladungen entsteht ein zeitunabhängiges elektrisches Feld. Magnetische Felder existieren nicht.
Die Maxwell’schen Gleichungen in Differentialform vereinfachen sich in diesem Falle
zu:
~ = 0
rotE
~ = ρ .
divD
(4.1)
(4.2)
Da die Rotation des elektrischen Feldes verschwindet, handelt es sich um ein reines Quellenfeld. Die Raumladungsdichte ist die Ursache dieses Quellenfeldes.
4.1.1
Poissongleichung
~ als Gradient einer
In Kapitel 2 haben wir gesehen, dass sich das elektrostatische Feld E
Potentialfunktion φ darstellen lässt.
~ = −gradφ
E
(4.3)
Setzen wir diese Beziehung in Gleichung 4.1, so ergibt sich:
rot gradφ = 0 .
(4.4)
Diese Gleichung ist immer erfüllt, da die Rotation eines Gradienten identisch verschwindet.
Setzen wir Gleichung 4.3 in Gleichung 4.2 ein, so ergibt sich:
~
~
divD = div εE
(4.5)
= −ε div gradφ für homogene Medien
= −ε ∆φ = ρ .
(4.6)
(4.7)
Daraus ergibt sich folgende Differentialgleichung, die auch als Poisson-Gleichung bekannt
ist:
ρ
∆φ = −
(4.8)
ε
Diese Gleichung gilt für homogene (ε = const.) Materialien mit Raumladungsdichteverteilungen ρ.
In quellenfreien Gebieten (ρ = 0) wird aus obiger Gleichung die sog. Laplace-Gleichung.
∆φ = 0
(4.9)
Fazit: Elektrostatische Felder können berechnet werden, indem eine Potentialfunktion
φ bestimmt wird, die die Poisson-Gleichung, bzw. die Laplace-Gleichung erfüllt. Da die
Potentialfunktion eine skalare Funktion ist, ist das Bestimmen einer Lösung der Potentialfunktion einfacher möglich als das Lösen der Maxwell’schen Gleichungen in denen das
elektrische Feld als vektorielle Größe auftritt. Das elektrische Feld kann dann mit Hilfe
von Gleichung 4.3 aus der Potentialfunktion bestimmt werden.
KAPITEL 4. EINTEILUNG ELEKTROMAGNETISCHER FELDER
4.2
28
Magnetostatische Felder
Aufgrund von gleichstromführenden, idealen Leitern (σ → ∞) - sowie in der Umgebung
von Permanentmagneten, die wir aber hier nicht weiter behandeln wollen - kommt es zu
einem zeitunabhängigen magnetischen Feld. Ein elektrisches Feld existiert nicht.
Die Maxwell’schen Gleichungen in Differentialform vereinfachen sich in diesem Falle
zu:
~ = J~L
rotH
~ = 0 .
divB
(4.10)
(4.11)
Die Größe J~L ist die Stromdichte im Leiter. (Aufgrund der unendlichen Leitfähigkeit ist
~ im Leiter Null!) Da die Divergenz des magnetischen Feldes
das elektrische Feld (J~L = σ E)
verschwindet handelt es sich um ein reines Wirbelfeld (Die Feldlinien der magnetischen
Flussdichte sind geschlossen!). Die Stromdichte ist die Ursache des Wirbelfeldes.
4.2.1
Magnetisches Vektorpotential
Im elektrostatischen Fall konnte eine skalare Potentialfunktion φ angegeben werden für
die die Poisson-Gleichung gilt. Im magnetostatischen Fall hilft die Einführung einer vek~ weiter.
toriellen Potentialfunktion A
Das magnetische Vektorpotential wird so definiert, dass es der Gleichung
~ = rotA
~
B
(4.12)
~ ist die Wirbeldichte des magnetischen Vektorgenügt, d.h. die magnetische Flussdichte B
~
potentials A.
Durch diese Festlegung ist das magn. Vektorpotential aber nicht eindeutig bestimmt.
Eindeutig wird das magn. Vektorpotential erst, wenn auch ein Wert für die Divergenz
festgelegt wird. Im Falle der Magnetostatik wählt man geschickterweise die CoulombEichung
!
~ = 0 ,
divA
(4.13)
d.h. das magnetische Vektorpotential soll quellenfrei sein.
Einsetzen von Definition 4.12 in Gleichung 4.11 liefert
~ = div rotA
~=0 .
divB
(4.14)
Die Divergenz der Rotation verschwindet immer (dies ist der Grund für die Festlegung in
Gleichung 4.12).
Einsetzen von Definition 4.12 in Gleichung 4.10 liefert
1
~
rotB
µ
1
~ = J~ .
=
rot rotA
µ
~ =
rotH
(4.15)
(4.16)
KAPITEL 4. EINTEILUNG ELEKTROMAGNETISCHER FELDER
29
Aus der Vektoranalysis ist folgender Zusammenhang bekannt:
~ = grad divA
~ − ∆A
~ .
rot rotA
(4.17)
Hieraus ergibt sich:
~ = 1
rotH
µ
!
~
~
grad div
| {zA} −∆A
.
(4.18)
=0
Aufgrund der Coulomb-Eichung verschwindet einer der Terme und es ergibt sich:
~=
∆A
−µJ~
(4.19)
Diese Gleichung ist die (vektorielle) Potentialgleichung für das magnetische Vektorpotential und ähnelt in ihrer Struktur der Poisson-Gleichung.
Wenn wir die vektorielle Potentialgleichung auswerten wollen, müssen wir noch wissen
wie wir den Delta-Operator angewendet auf einen Vektor zu berechnen haben. Bislang
kennen wir den Delta-Operator nur angewendet auf eine skalare Funktion.
In kartesischen Koordinaten kann die vektorielle Potentialgleichung durch drei skalare
Differentialgleichungen für die verschiedenen kartesischen Koordinaten ersetzt werden:
∆Ax = −µJx
∆Ay = −µJy
∆Az = −µJz .
(4.20)
(4.21)
(4.22)
In anderen Koordinatensystemen ist die Auswertung komplizierter Hier bietet es sich an
direkt über die Beziehung
~ = grad divA
~ − rot rotA
~
∆A
(4.23)
zu geben.
4.2.2
Biot-Savart’sches Gesetz
Eine Gleichung, die direkt das magnetische Feld in der Umgebung von gleichstromdurchflossenen Linienleitern angibt ist das Biot-Savart’sche Gesetz.
~ r) =
Z B (~
µI
d~s0 × (~r − ~r0 )
4π
|~r − ~r0 |3
.
C
Die Bedeutung der einzelnen Größen ist in Bild 4.1 dargestellt.
I Strom im Linienleiter.
(4.24)
KAPITEL 4. EINTEILUNG ELEKTROMAGNETISCHER FELDER
30
Abbildung 4.1: Zur Anwendung des Biot-Savart’sches Gesetzes.
~r Aufpunktsvektor: Ort an dem das Feld berechnet wird.
~r0 Quellpunktsvektor: Ort an dem der Strom fließt. (Es wird über die gestrichenen
Größen integriert.)
d~s0 Wegelement über das integriert wird.
In der Übung findet sich ein Beispiel zur Anwendung des Biot-Savart’schen Gesetzes (siehe
Kapitel B.5 auf Seite 75).
4.2.3
Selbst- und Gegeninduktivität
In einem vorherigen Kapitel haben wir die Kapazität C einer Zweileiteranordnung mit
Hilfe der elektrischen Feldenergie berechnet. Ebenso lässt sich die (Selbst-)Induktivität L
einer Spule mit Hilfe der magnetischen Feldenergie bestimmen.
ZZZ
ZZZ
1 ~ ~
µ0 H · Hdv
(4.25)
Wm =
wm dv =
2
V
=
V
1 2
LI
2
(4.26)
Die Induktivität ist also ein Maß für die im Feld gespeicherte magnetische Energie.
Erinnerung
In der Netzwerktheorie verknüpft die Induktivität Strom und Spannung an einer Spule
miteinander
UL = −L
dIL
dt
.
(4.27)
In Worten bedeutet dies, dass es zu einem Spannungsabfall an der Spule kommt, wenn der
Strom sich in der Spule ändert. Die Induktivität hat jedoch auch im Gleichstromfall eine
Bedeutung!
Befinden sich zwei Spulen im Raum, so kann man jeder Spule eine Selbstinduktivität
zuordnen. Zusätzlich sind die Spulen über eine Gegeninduktivität gekoppelt, da ein Teil der
KAPITEL 4. EINTEILUNG ELEKTROMAGNETISCHER FELDER
31
Abbildung 4.2: Magnetisches Feld einer stromdurchflossenen Leiteranordnung.
Abbildung 4.3: Magnetisches Feld zweier Stromschleifen.
Feldlinien der ersten Spule die zweite durchsetzten und umgekehrt. (Achtung: Wir reden
hier über statische Felder, da wird keine Spannung induziert!)
Die gesamte, im Feld gespeicherte magnetische Feldenergie kann wieder über die Gleichung 4.25 berechnet werden, wobei hier nun aber die Summe der magnetischen Feldstärken beider Spulen berücksichtigt werden muss.
ZZZ
ZZZ
2
1 ~
~ 2 dv
µ0 H1 + H
(4.28)
Wm =
wm dv =
2
V
Z VZ Z
1 ~
~2 · H
~1 + H
~ 2 dv
µ0 H1 + H
(4.29)
=
2
Z VZ Z
1 ~ ~
~
~
~
~
=
µ0 H1 · H1 + 2H1 · H2 + H2 · H2 dv
(4.30)
2
V
= Wm1 + Wm12 + Wm2
1
1
=
L1 I12 + M I1 I2 + L2 I22
2
2
(4.31)
(4.32)
Daraus folgt:
L1
µ0
= 2
I1
ZZZ ~1 · H
~ 1 dv
H
Z VZ Z µ0
~
~
L2 = 2
H2 · H2 dv
I2
V
ZZZ µ0
~
~
M =
H1 · H2 dv
I1 I2
.
(4.33)
V
Grundsätzlich gilt stets folgender Zusammenhang:
p
M ≤
L1 L2
.
(4.34)
KAPITEL 4. EINTEILUNG ELEKTROMAGNETISCHER FELDER
32
Abbildung 4.4: Statisches Strömungsfeld und zeitlich konstantes magnetisches Feld.
Es lässt sich ein magnetischer Kopplungsfaktor k definieren mit
k = √
4.3
M
≤1 .
L1 L2
(4.35)
Statisches Strömungsfeld
Aufgrund der endlichen Leitfähigkeit des Mediums (σ 6= 0) stellt sich zwischen Potentialunterschieden ein zeitunabhängiges Strömungsfeld ein. Die resultierende Stromdichtever~ Der Zusammenhang
teilung J~ (~r) führt zu einem zeitlich konstanten magnetischen Feld H.
ist in Bild 4.4 gezeigt. Die Potentiale φ1 und φ2 seien hier als Randbedingungen vorgege~ handelt es sich um ein Quellenfeld. Daher
ben. Beim elektrischen Strömungsfeld J~ = σ E
führt auch hier der bei elektrostatischen Feldern eingeführte Ansatz
~ = −grad φ
E
(4.36)
weiter. Folglich sind die in der Elektrostatik angewandten Methoden zur Berechnung der
Felder hier ebenso anwendbar.
Aus der in diesem ersten Schritt ermittelten Stromdichteverteilung kann dann in einem zweiten Schritt das resultierende magnetische Feld ermittelt werden. Da sich das
magnetische Feld zeitlich nicht ändert, gibt es auch keine Rückwirkung auf die Stromdichteverteilung (siehe zweite Maxwell’sche Gleichung). Man spricht daher allgemein auch
von einer Entkoppelung magnetischer und elektrischer Felder für den Fall der
Statik.
4.4
Zusammenfassung statische Felder
Wir können also für den Fall der Statik zusammenfassen:
• Elektrostatik:
→ zeitunabhängiges, elektrisches Quellenfeld als Folge ruhender Ladungen
→ kein magnetisches Feld
• Magnetostatik:
→ zeitunabhängiges, magnetisches Wirbelfeld als Folge von Gleichströmen in idealen Leitern
KAPITEL 4. EINTEILUNG ELEKTROMAGNETISCHER FELDER
33
Abbildung 4.5: Plattenkondensator mit Wechselspannungsquelle U (t).
→ kein elektrisches Feld
• Statisches Strömungsfeld:
→ zeitunabhängiges, elektrisches Quellenfeld (Strömungsfeld) als Folge von Potentialunterschieden in nicht-idealen Leitern
→ zeitunabhängiges, magnetisches Quellenfeld als Folge des Strömungsfeldes
(keine Rückwirkungen auf das Strömungsfeld, da zeitlich konstantes magne~
tisches Feld (∂ H/∂t
= 0))
Im statischen Fall sind die elektrischen und magnetischen Felder voneinander entkoppelt.
4.5
Quasistatische Felder
Die Felder sind nun zeitabhängig (∂/∂t 6= 0), wobei die zeitliche Änderung langsam erfolgt.
Was unter einer langsamen Änderung zu verstehen ist, wollen wir uns an einem Beispiel
verdeutlichen.
Beispiel
Gegeben sei der Plattenkondensator in Bild 4.5. Aufgrund der Zeitabhängigkeit der
Spannung U = U (t) ist auch das elektrische Feld zeitabhängig E = E(t).
Man spricht von langsam veränderlichen Feldern, wenn das elektrische Feld innerhalb
der Kondensatoranordnung zu jedem Zeitpunkt dem elektrischen Feld entspricht, das im
statischen Fall diesem augenblicklichen Spannungswert zugeordnet ist! Also
statisch:
quasistatisch:
U
d
U (t)
E(t) =
d
E =
(4.37)
→
E(t) ∼ U (t)
(4.38)
(4.39)
Bild 4.6 zeigt dies noch einmal für die Zeitverläufe der Spannung und des Feldes. Die Felder
verhalten sich quasistatisch, wenn die endliche Ausbreitungsgeschwidigkeit der Felder (im
Vakuum ist dies die Lichtgeschwindigkeit) vernachlässigt werden kann.
KAPITEL 4. EINTEILUNG ELEKTROMAGNETISCHER FELDER
34
Abbildung 4.6: Spannung und Feld am Plattenkondensator im (a) statischen und (b)
quasistatischen Fall.
Abbildung 4.7: Spule mit Wechselstromquelle I(t).
Beispiel (Ende)
Beispiel
Gegeben sei die langgestreckte Spule mit quasistatischem H-Feld in Bild 4.7. Aufgrund
der Zeitabhängigkeit des Stromes I = I(t) ist auch das magnetische Feld in der Spule
zeitabhängig Hi = Hi (t).
Man spricht von langsam veränderlichen Feldern, wenn das magnetische Feld innerhalb der Spulenanordnung zu jedem Zeitpunkt dem magnetischen Feld entspricht, das im
KAPITEL 4. EINTEILUNG ELEKTROMAGNETISCHER FELDER
35
Abbildung 4.8: Zeitlicher Verlauf der Spannung U (t) zur Erläuterung der Anwendbarkeit
der quasistatischen Näherung.
statischen Fall diesem augenblicklichen Stromwert zugeordnet ist! Also
statisch:
quasistatisch:
nI
l
nI(t)
Hi (t) =
l
Hi =
(4.40)
→
Hi (t) ∼ I(t)
(4.41)
(4.42)
Beispiel (Ende)
Bei der Bestimmung einer Näherungs-Lösung kann die Zeitabhängigkeit zunächst außer
acht gelassen werden. Im ersten Schritt wird die statische Lösung ermittelt. Die Zeitabhängigkeit wird dann in einem zweiten Schritt (durch einfache Multiplikation mit einer
harmonischen Zeitfunktion) berücksichtigt.
Im Folgenden wollen wir uns einmal mathematisch etwas genauer überlegen, unter
welchen Bedingungen die quasistatische Betrachtungsweise wohl gute Näherungslösungen
ergibt. Wir hatten bereits gesagt, dass elektromagnetische Felder sich im Vakuum mit der
Lichtgeschwindigkeit c0 ausbreiten.
m
m
1
= 2,9979 · 108 ≈ 3 · 108
ε0 µ 0
s
s
c0
c = √
(im Medium mit εr )
εr
c0 = √
(im Vakuum)
(4.43)
(4.44)
Soll die Änderung der Spannung an einem Kondensator quasi ohne Zeitverzug im gesamten
Kondensator eine Feldänderung bewirken, so muss die Laufzeit des Signals innerhalb des
Kondensators vernachlässigbar sein. Bild 4.8 zeigt einen harmonischen Spannungsverlauf.
Soll obige Bedingung erfüllt sein, so muss die Laufzeit t auf jeden Fall deutlich kleiner als
die Periodendauer T sein!
t=
s
T
c
(4.45)
KAPITEL 4. EINTEILUNG ELEKTROMAGNETISCHER FELDER
36
Die Variable s gibt hierbei die zu überwindende Strecke an, ist also ein Maß für die
Abmessungen des Kondensators. Mit dem bekannten Zusammenhang
c = λf =
λ
T
→
T =
λ
c
(4.46)
ergibt sich die Bedingung
.
sλ
(4.47)
Die Wellenlänge λ bei der betrachteten Frequenz muss also deutlich größer sein als die Abmessungen der Anordnung, damit die Zeitverzögerung durch die endliche Ausbreitungsgeschwindigkeit vernachlässigt werden kann. In der Praxis wird häufig gefordert, dass
folgende Bedingung gilt
s ≤
4.6
λ
10
.
(4.48)
Quasistationäre Felder mit Stromverdrängung
Im statischen Fall waren die elektrischen und magnetischen Feldgrößen entkoppelt. Im
quasi-statischen Fall (langsam zeitveränderliche Felder) gilt diese Annahme immer noch
mit ausreichender Gültigkeit. Steigt die Frequenz weiter, so kann nun von der gegenseitigen
Verkopplung der Felder nicht mehr abgesehen werden. Es tritt ein Phänomen auf, das als
Stromverdrängung (Skineffekt) bezeichnet wird.
Bevor wir uns dem Problem mathematisch nähern, wollen wir eine kurze anschauliche
Exkursion unternehmen.
4.6.1
Anschauliche Beschreibung
Die nachfolgende Beschreibung ist zwar mathematisch nicht exakt, gibt aber ein gute
Gefühl dafür wie ein Strom durch sein selbst erzeugtes magnetisches Feld auf sich selbst
zurückwirkt. Wir betrachten dabei Zusammenhänge nacheinander, die natürlich simultan
ablaufen.
Zunächst einmal betrachten wir einen Leiter mit endlicher Leitfähigkeit. In diesem Lei~ a ein (siehe Bild 4.9).
ter stelle sich zunächst die homogene Stromdichteverteilung J~a = σ E
Aufgrund des Durchflutungsgesetzes
I
ZZ
~
~
H · d~s =
J~ · dA
(4.49)
C(A)
A
~ verknüpft. In der Mitte
ist hiermit ein umwirbelndes, zeitvariantes magnetisches Feld H
des Leiters verschwindet das magnetische Feld und am Rand des Leiters nimmt es seinen
Maximalwert an. Außerhalb des Leiters fällt es wieder mit 1/r ab (siehe Übung).
KAPITEL 4. EINTEILUNG ELEKTROMAGNETISCHER FELDER
37
Abbildung 4.9: Anschauliche Beschreibung der Stromverdrängung.
Abbildung 4.10: Stromdichteverteilung (bei gleichem Gesamtstrom) im Leiterquerschnitt
mit Skineffekt.
Aufgrund des Induktionsgesetzes
ZZ
I
d
~ · dA
~
~ · d~s = −
B
E
dt
(4.50)
A
C(A)
~ w verist mit dem magnetischen Feld ein umwirbelndes, zeitvariantes elektrisches Feld E
knüpft.
(Die Richtungen des elektrischen Wirbelfeldes wurden eingetragen für ein ansteigendes
magnetisches Feld. Bei genauerer Betrachtung sind die Zusammenhänge etwas komplexer,
da Ea und Ew nicht in Phase sind.)
Man erkennt, dass sich in der Leitermitte die elektrischen Feldlinien schwächen und es
in den Randbereichen zu einer konstruktiven Überlagerung kommt. Je höher die Frequenz
ist, desto größer ist das induzierte Wirbelfeld und desto größer die Stromverdrängung.
Bild 4.10 zeigt die Stromdichteverteilung im Querschnitt eines quadratischen Leiters bei
unterschiedlichen Frequenzen.
Für die Praxis bedeutet dies, dass bei höheren Frequenzen die einfache Formel
l
(4.51)
σA
für die Berechnung des Widerstandes R nicht mehr gilt! Durch die Stromverdrängung
steigt der Widerstand, da der innere Bereich des Leiters nicht mehr genutzt wird. Ein
mathematisch präzisere Größe zur Beschreibung des Widerstandes bei hohen Frequenzen
(Skin-Tiefe, bzw. Eindring-Tiefe δ) lernen wir im nächsten Unterkapitel kennen.
R =
KAPITEL 4. EINTEILUNG ELEKTROMAGNETISCHER FELDER
4.6.2
38
Eindringtiefe
Um zu beurteilen, ab wann der Skineffekt (d.h. das nur teilweise Eindringen der Stromdichte in einen Leiter) zu beachten ist, müssen wir uns noch einmal die Maxwell’schen Glei~
chungen ansehen. Die Verschiebungsstromdichte ∂ D/∂t
wollen wir dabei allerdings noch
vernachlässigen. Dieser Term wird erst wichtig, wenn wir uns Wellenausbreitungsphänomene ansehen wollen.
~ = J~ = σ E
~
rotH
~
~ = − ∂B
rotE
∂t
~ = ρ
divD
~ = 0
divB
(4.52)
(4.53)
(4.54)
(4.55)
Wenden wir den Rotationsoperator auf Gleichung 4.53 an, so erhalten wir
~ = −rot ∂ µH
~
rot rot E
∂t
∂
~
= −µ rot H
∂t
(4.56)
(4.57)
Mit Gleichung 4.52 folgt:
~
~ = −µσ ∂ E
rot rot E
∂t
.
(4.58)
Unter Anwendung der zuvor bereits angegebenen Beziehung
~ = grad divA
~ − ∆A
~
rot rotA
(4.59)
folgt
~
~ − ∆E
~ = −σµ ∂ E
grad divE
∂t
.
(4.60)
~ = 0, also)
Für quellenfreie Gebiete (keine Raumladung: ρ = 0 gilt div E
~ = σµ
∆E
~
∂E
∂t
.
(4.61)
Gleichung 4.61 ist von Typus einer Diffusionsgleichung und gilt für leitfähige Gebiete
σ 6= 0. Wie der Name schon andeutet, beschreibt die Differenzialgleichung diffisionsartige
Ausbreitungsvorgänge (im Gegensatz zu wellenförmigen Ausbreitungsvorgängen, die wir
später noch kennenlernen wollen).
Bei harmonischer Zeitabhängigkeit gilt entsprechend (∂/∂t → jω):
~ = jωσµE
~
∆E
,
(4.62)
KAPITEL 4. EINTEILUNG ELEKTROMAGNETISCHER FELDER
39
Abbildung 4.11: Eindringen des elektrischen Feldes in den leitfähigen Halbraum z ≥ 0.
Abbildung 4.12: Äquivalente Leitschichtdicke
~
mit dem Phasor E.
Wir wollen uns nur eine elementare Lösung dieser Differentialgleichung ansehen, um
einen wichtigen Begriff (die Eindringtiefe) kennenzulernen. Im eindimensionalen Fall
stellt folgende Funktion eine Lösung dar (überprüfbar durch einfaches Einsetzen in Gleichung 4.62):
z
E(z) = E0 · e−z/δ · e−jz/δ = E0 · e(1+j) δ
.
(4.63)
Bild 4.11 zeigt das Verhalten der Funktion für z ≥ 0, also das Eindringen des elektrischen
Feldes in den leitfähigen Halbraum z ≥ 0. Die neue Größe δ stellt dabei die sog. Eindringtiefe oder Skintiefe dar, also der Wert, bei dem der Betrag der elektrischen Feldstärke
(und damit auch der Stromdichte) um den Faktor 1/e bezogen auf den maximalen Wert
am Rand (z = 0) abgefallen ist. Mit anderen Worten: nach wenigen Skintiefen δ vom Rand
des Leiters aus ist die Stromdichte nahezu auf Null abgefallen.
rδ =
2
ωσµ
(4.64)
Die Skintiefe von Kupfer (Cu) (σ = 5,7 · 107 S/m) z.B. beträgt bei einer Frequenz von
100 MHz nur δ = 6,6 µm.
Die Skintiefe δ wird auch als äquivalente Leitschichtdicke bezeichnet, da sie bei der
Berechnung des Widerstandes von Leitern in denen der Skineffekt auftritt von Bedeutung
ist. Bild 4.11 zeigt die anschaulichen Interpretation. Der Strom, der unter der Annahme
einer konstanten Stromdichte in der Skintiefe δ fließen würde, ist genauso groß wir der
Strom bei exponentiell abfallender Stromdichte im gesamten Halbraum. Man kann daher
die Skintiefe bei der Berechnung des Widerstanden heranziehen, falls die für den Halbraum
KAPITEL 4. EINTEILUNG ELEKTROMAGNETISCHER FELDER
40
gemachten Annahmen eine gute Näherung für den realen Fall darstellen, also falls die
Querabmessungen eines Leiters deutlich größer sind als die Skintiefe. In diesem Fall kann
als Fläche, auf die sich der Strom (homogen) verteilt, das Produkt aus Skintiefe und
Umfang des Leiters angesetzt werden.
Im Gleichstromfall gilt
R =
l
l
=
σA
σπr2
(4.65)
und im hochfrequenten Fall gilt
R =
l
l
=
σU δ
σ2πrδ
.
(4.66)
So ergibt sich für einen Draht mit einem Radius r = 1 mm und einer Länge l = 1 cm aus
Kupfer (σ = 5,7 · 107 S/m) ein Gleichstromwiderstand von R(0 Hz) = 55.8 µΩ sowie ein
hochfrequenter Widerstand bei 1 MHz von R(1 MHz) = 419 µΩ (δ = 66.7 µm).
4.7
Elektromagnetische Wellen
~
Gegenüber dem quasistationären Fall wird nun noch die Verschiebungsstromdichte ∂ D/∂t
mit hinzugenommen, so dass nun die vollständigen Maxwell’schen Gleichungen zu berücksichtigen sind. Durch Hinzunahme der Verschiebungsstromdichte ist nun Wellenausbreitung möglich.
~
~ = J~ + ∂ D
rotH
∂t
~
~ = − ∂B
rotE
∂t
~
divD = ρ
~ = 0
divB
4.7.1
(4.67)
(4.68)
(4.69)
(4.70)
Die Wellengleichung
Bei der Suche nach Lösungen für das obige System von Differentialgleichungen hat sich
folgendes Vorgehen als vorteilhaft erwiesen.
Betrachtet werde ein homogenes (εr , µr , σ = const.), isotropes (εr , µr , σ =
richtungsunabhngiges, d.h.skalar) Medium ohne Raumladungen (ρ = 0).
Wir wenden den Rotationsoperator auf die 2. Maxwell’sche Gleichung an
~ = −rot ∂ µH
~
rot rot E
∂t
∂
~ .
= −µ rot H
∂t
(4.71)
(4.72)
KAPITEL 4. EINTEILUNG ELEKTROMAGNETISCHER FELDER
41
Mit der 1. Maxwell’schen Gleichung folgt:
~ = −µ ∂
rot rot E
∂t
~
∂D
J~ +
∂t
!
.
(4.73)
Unter Anwendung der zuvor bereits angegebenen Beziehung
~ = grad divA
~ − ∆A
~
rot rotA
(4.74)
folgt
~ − ∆E
~ = −µ ∂
grad divE
∂t
∂
= −µ
∂t
~
∂D
J~ +
∂t
!
~
~ + ε ∂E
σE
∂t
(4.75)
!
.
(4.76)
~ = 0) gilt also
Für quellenfreie Gebiete (keine Raumladung: ρ = 0, also div E
~ − µσ
∆E
~
~
∂E
∂ 2E
− µε 2 = 0
∂t
∂t
(4.77)
Diese Gleichung ist vom Typus einer Wellengleichung, weil ihre Lösungen Wellenausbreitungsphänomene beschreiben.
In Raumbereichen, in denen die elektrische Leitfähigkeit verschwindet (σ = 0) ergibt
sich eine vereinfachte Wellengleichung.
~ − µε
∆E
~
∂ 2E
=0
∂t2
(4.78)
Ebenso kann eine Wellengleichung für das magnetische Feld abgeleitet werden:
~ − µσ
∆H
~
~
∂H
∂ 2H
− µε 2 = 0
∂t
∂t
(4.79)
In Raumbereichen, in denen die elektrische Leitfähigkeit verschwindet (σ = 0) ergibt sich
eine vereinfachte Wellengleichung.
~ − µε
∆H
~
∂ 2H
=0
∂t2
Im folgenden soll eine prominente Lösung der Wellengleichung vorgestellt werden.
(4.80)
KAPITEL 4. EINTEILUNG ELEKTROMAGNETISCHER FELDER
4.7.2
42
Homogene ebene Wellen
Die einfachste Lösung der Wellengleichung stellt eine homogene ebene Welle (HEW) dar.
Im folgenden ist die Gleichung einer homogenen ebenen Welle gegeben, die sich in xRichtung ausbreitet und in y-Richtung polarisiert ist (Polarisationsrichtung = Richtung
des elektrischen Feldvektors):
~
E(x,
t) = E0 · cos (ωt − kx) · ~ey
~
H(x,
t) = H0 · cos (ωt − kx) · ~ez
(4.81)
(4.82)
mit der Beziehung
H0 =
E0
ZF
.
(4.83)
Die neue Größe ZF heißt Feldwellenwiderstand und stellt das feste Verhältnis zwischen
dem Betrag der elektrischen Feldstärke E0 und dem Betrag der magnetischen Feldstärke
H0 bei einer HEW dar. Der Feldwellenwiderstand ist eine charakteristische Größe des
Mediums in dem sich die Welle ausbreitet.
r
µ
E0
=
(4.84)
ZF =
H0
ε
Im freien Raum gilt
r
ZF 0 =
µ0
= 120π Ω ≈ 377 Ω .
ε0
(4.85)
Die Größe k ist die Wellenzahl und berechnet sich aus der Wellenlänge λ.
k =
2π
λ
(4.86)
Wie sehen die Lösungen nun anschaulich aus?
Bild 4.13 zeigt die elektrische Feldstärke als Funktion des Ortes x zu unterschiedlichen
Zeitpunkten t = 0 und t = T /4. Zum Zeitpunkt t = 0 gilt
2π
Ey (x, t = 0) = E0 cos (−kx) = E0 cos
x
,
(4.87)
λ
also ist Ey eine räumlich-periodische Funktion (räumliche Periodenlänge ist die Wellenlänge λ). Zum Zeitpunkt t = T /4 gilt
2π T
Ey (x, t = T /4) = E0 cos (ωt − kx) = E0 cos
−kx
.
(4.88)
|T{z4}
π
2
Es ergibt sich also mit fortschreitender Zeit t eine Ausbreitung der Welle in positiver
x-Richtung.
KAPITEL 4. EINTEILUNG ELEKTROMAGNETISCHER FELDER
43
Abbildung 4.13: Elektrische Feldstärke als Funktion des Ortes x zu unterschiedlichen Zeitpunkten t = 0 und t = T /4.
Die Geschwindigkeit mit der sich die Welle ausbreitet ist
1
λ
= λf = √
T
µε
c =
.
(4.89)
Im Vakuum ist dies die Lichtgeschwindigkeit c0 :
c0 = √
1
≈ 3 · 108 m/s .
µ 0 ε0
(4.90)
Zum Schluss wollen wir noch einmal ein paar wesentliche Eigenschaften der homogenen
ebenen Welle zusammenfassen:
1. E und H sind in Phase, d.h. sie besitzen die gleiche Zeitabhängigkeit cos(ωt − kx).
2. E und H sind senkrecht zueinander und auch senkrecht zur Ausbreitungsrichtung
~ ⊥H
~ ⊥ ~v ).
(E
3. Flächen konstanter Phase sind Ebenen senkrecht zur Ausbreitungsrichtung und auf
einer Phasenfläche ist der Betrag der Feldstärkewerte konstant (= homogen), daher
auch der Name homogene ebene Welle.
Bild 4.15 zeigt noch einmal anschaulich die Ebenen und die elektrischen und magnetischen
Feldstärkevektoren zu einem festen Zeitpunkt (t = 0).
4.7.3
Der Poynting-Vektor
Homogene ebene Wellen können sich frei im Raum ausbreiten. Sie benötigen zu ihrer Ausbreitung keine Materie. Mit der Ausbreitung der Welle ist ein Energietransport verbunden,
~ berechnen lässt.
der sich mit dem Poynting-Vektor S
~ = E
~ ×H
~
S
(4.91)
Der Poynting-Vektor zeigt in Ausbreitungsrichtung und gibt die pro Flächeneinheit trans~ = V/m · A/m = W/m2 .
portierte Leistung an. Die Einheit ist [S]
KAPITEL 4. EINTEILUNG ELEKTROMAGNETISCHER FELDER
Abbildung 4.14: Feldstärken und Phasenflächen bei einer HEW.
Abbildung 4.15: Poynting-Vektor.
44
Teil I
Anhang
45
Anhang A
Mathematische Grundlagen
A.1
Koordinatensysteme
Koordinatensysteme dienen der Beschreibung der Lage im Raum. Je nach geometrischer
Form des Problems kann die Wahl verschiedener Koordinatensysteme von Vorteil sein.
A.1.1
Kartesisches Koordinatensystem
In kartesischen Koordinaten werden die drei unabhängigen Variablen x, y, z verwendet.
Abbildung A.1: Kartesische Koordinaten.
Bild A.1 zeigt die Beschreibung der Lage eines Punktes P0 durch die drei Variablen
x0 , y0 , x0 . Die Richtungen der Koordinatenachsen bilden ein Rechtssystem. Der Ursprungsvektor zum Punkt P0 lautet:
x0
~r0 = y0 = x0 · ~ex + y0 · ~ey + z0 · ~ez .
(A.1)
z0
A.1.2
Zylinderkoordinatensystem
In Zylinderkoordinaten werden die drei unabhängigen Variablen R, ϕ, z verwendet. Die
Variable ϕ liegt im Wertebereich 0 ≤ ϕ ≤ 2π.
46
ANHANG A. MATHEMATISCHE GRUNDLAGEN
47
Abbildung A.2: Zylinderkoordinatensystem.
Bild A.2 zeigt die Beschreibung der Lage eines Punktes P0 durch die drei Variablen
R0 , ϕ0 , z0 . Die Richtungen der Einheitsvektoren in Zylinderkoordinaten ~eR , ~eϕ , ~ez bilden
ein Rechtssystem. Die Richtung der Einheitsvektoren ~eR und ~eϕ ist abhängig vom Ort!
Dies ist anders als bei den kartesischen Koordinaten, bei denen die Vektoren immer in die
gleich Richtung zeigen.
Durch folgende Transformation lassen sich die kartesischen Koordinaten x0 , y0 , z0 berechnen.
x0 = R0 cos ϕ0
y0 = R0 sin ϕ0
z0 = z0
A.1.3
(A.2)
(A.3)
(A.4)
Kugelkoordinatensystem
In Kugelkoordinaten werden die drei unabhängigen Variablen r, ϑ, ϕ verwendet. Die Variable ϕ liegt im Wertebereich 0 ≤ ϕ ≤ 2π. Die Variable ϑ liegt im Wertebereich 0 ≤ ϕ ≤ pi.
Abbildung A.3: Kugelkoordinatensystem.
Bild A.3 zeigt die Beschreibung der Lage eines Punktes P0 durch die drei Variablen
R0 , ϑ0 , ϕ0 . Die Richtungen der Einheitsvektoren in Kugelkoordinaten ~eR , ~eϑ , ~eϕ bilden ein
Rechtssystem. Die Richtung aller Einheitsvektoren ist abhängig vom Ort!
ANHANG A. MATHEMATISCHE GRUNDLAGEN
48
Durch folgende Transformation lassen sich die kartesischen Koordinaten x0 , y0 , z0 berechnen.
x0 = r0 sin ϑ0 cos ϕ0
y0 = r0 sin ϑ0 sin ϕ0
z0 = r0 cos ϑ0
A.2
(A.5)
(A.6)
(A.7)
Vektor-Algebra
Vektoren sind gerichtete Größen, die neben einem Betrag auch noch eine Richtung besitzen.
A.2.1
Addition und Subtraktion
In kartesischen Koordinaten lassen sich die Vektoren einfach komponentenweise addieren
und subtrahieren.
r1x
r2x
r1x + r2x
(A.8)
~r1 + r~2 = r1y + r2y = r1y + r2y
r1z
r2z
r1z + r2z
r1x
r2x
r1x − r2x
~r1 − r~2 = r1y − r2y = r1y − r2y
(A.9)
r1z
r2z
r1z − r2z
Der Betrag eines Vektors ergibt sich in kartesischen Koordinaten zu:
q
|~r| =
rx2 + ry2 + rz2
(A.10)
Graphisch entspricht die Addition dem Aneinanderhängen der Vektoren. Bei der Subtraktion entsprechend, allerdings muss die Richtung des zu subtrahierenden Vektors zuvor
umgekehrt werden.
A.2.2
Skalar- und Vektorprodukt
Das Skalarprodukt zweier Vektoren ist wie folgt definiert:
~r1 · ~r2 = |~r1 | |~r1 | cos α
r1x
r2x
= r1y · r2y
r1z
r2z
= r1x r2x + r1y r2y + r1z r2z
(A.11)
(A.12)
(A.13)
Das Ergebnis ist ein skalarer Wert. Bild A.4 zeigt die Bedeutung des Winkels α. Falls
die Vektoren ~r1 und ~r2 senkrecht aufeinanderstehen, so ist der Zwischenwinkel α gleich
90◦ und das Skalarprodukt verschwindet. Sind die Vektoren parallel, so ergibt sich ein
ANHANG A. MATHEMATISCHE GRUNDLAGEN
49
Abbildung A.4: Skalarprodukt.
Zwischenwinkel von α = 0 und das Skalarprodukt entspricht dem Produkt der Beträge
der Vektoren.
Beim Vektorprodukt ist das Ergebnis ein Vektor.
~r3 = ~r1 × ~r2
(A.14)
Der Ergebnisvektor ~r3 seht senkrecht auf ~r1 und ~r2 . Die Richtung ergibt sich nach der
Rechte-Hand-Regel: ~r1 , ~r2 und ~r3 bilden ein Rechtssystem.
Der Betrag des Ergebnisvektors berechnet sich zu:
~r1 × ~r2 = |~r1 | |~r1 | sin α
(A.15)
und entspricht der in Bild A.5 aufgespannten Parallelogrammfläche. Falls die Vektoren
Abbildung A.5: Vektorprodukt.
~r1 und ~r2 senkrecht aufeinanderstehen, so ist der Zwischenwinkel α gleich 90◦ und das
Vektorprodukt entspricht vom Betrag her dem Produkt der Beträge der Vektoren. Sind
die Vektoren parallel, so ergibt sich ein Zwischenwinkel von α = 0 und das Vektorprodukt
verschwindet.
In kartesischen Koordinaten kann das Vektorprodukt auch durch folgende Determinante bestimmt werden.
~ex ~ey ~ez ~r1 × ~r2 = r1x r1y r1z (A.16)
r2x r2y r2z = ~ex (r1y r2z − r1z r2y ) −
(A.17)
~ey (r1x r2z − r1z r2x ) +
(A.18)
~ez (r1x r2y − r1y r2x )
(A.19)
ANHANG A. MATHEMATISCHE GRUNDLAGEN
A.3
50
Vektor-Analysis
Die Vektoranalysis umfasst eine Reihe von Differentialoperatoren, die in der elektromagnetischen Feldtheorie wichtig sind.
A.3.1
Gradient
Der Differentialoperator Gradient wird auf eine skalare Funktion φ(x, y, z) angewendet und
ergibt als Ergebnis einen Vektor. In kartesischen Koordinaten ist der Differentialoperator
wie folgt definiert.
grad φ =
∂φ
∂φ
∂φ
~ex +
~ey +
~ez
∂x
∂y
∂z
(A.20)
Anschaulich zeigt der Ergebnisvektor in jedem Punkt in Richtung der stärksten Änderung
der Skalarfunktion φ.
Die Differentialoperatoren werden auch häufig unter Verwendung des Nabla-Operators
geschrieben.
∇ =
∂
∂
∂
~ex + ~ey + ~ez
∂x
∂y
∂z
(A.21)
Somit ergibt sich für den Gradient-Operator:
grad φ = ∇φ
(A.22)
In anderen Koordinatensystemen hat der Nabla-Operator, bzw. der Gradient-Operator
eine kompliziertere Gestalt. Die entsprechenden Formeln sind in Hilfsblatt 1 zusammmengefasst.
Beispiel
~ aus dem Potential φ einer ruhenden PunktBerechnung der elektrischen Feldstärke E
ladung unter Verwendung von Kugelkoordinaten.
φ (r) =
Q
4πε0 r
(A.23)
Aus der Vorlesung ist bekannt:
~ = −grad φ
E
∂φ
1 ∂φ
1 ∂φ
= −~er
− ~eϑ
− ~eϕ
∂r | r{z∂ϑ}
r sin ϑ ∂ϕ
|
{z
}
=0
=0
Q ∂ 1
= −~er
4πε0 ∂r r
Q 1
=
~er
4πε0 r2
(A.24)
(A.25)
(A.26)
(A.27)
ANHANG A. MATHEMATISCHE GRUNDLAGEN
51
Alternative Berechnung mit kartesischen Koordinaten:
Angabe der Potentialfunktion in kartesischen Koordinaten:
φ =
Q
Q
1
p
=
4πε0 r
4πε0 x2 + y 2 + z 2
(A.28)
~ = −grad φ:
Einsetzen in E
~ = −~ex ∂φ − −~ey ∂φ − ~ez ∂φ
E
∂x
∂y
∂z
(A.29)
Exemplarische Berechnung einer der partiellen Ableitungen:
− 1 i
Q
∂ h 2
∂φ
=
·
x + y2 + z2 2
∂x
4πε0 ∂x
Anwendung der Kettenregel [u (v(x))]0 = u0 (v(x)) v 0 (x) liefert:
− 3
∂φ
Q
1
=
· −
x2 + y 2 + z 2 2 · (2x)
∂x
4πε0
2
Q
x
= −
· p
4πε0 ( x2 + y 2 + z 2 )3
{z
}
|
(A.30)
(A.31)
(A.32)
=r
Q
x
= −
· 3
4πε0 r
(A.33)
Ebenso ergibt sich:
Q
y
∂φ
=−
· 3
∂y
4πε0 r
und
∂φ
Q
z
=−
· 3
∂z
4πε0 r
(A.34)
Zusammenführung der Ableitungen ergibt das gleiche Resultat, dass zuvor - jedoch mit
weniger Aufwand - in Kugelkoordinaten ermittelt wurde. Dieses Beispiel zeigt, dass das
Rechnen mit problemangepassten Koordinaten effizienter ist.
~ =
E
Q
(x~ex + y~ex + z~ez )
{z
}
4πε0 |
(A.35)
=~
r=r~er
Q
~er
=
4πε0 r2
Beispiel (Ende)
(A.36)
ANHANG A. MATHEMATISCHE GRUNDLAGEN
A.3.2
52
Divergenz
~ y, z) angewendet
Der Differentialoperator Divergenz wird auf eine Vektor-Funktion A(x,
und ergibt als Ergebnis eine skalare Größe. In kartesischen Koordinaten ist der Differentialoperator wie folgt definiert.
~ = ∇·A
~ = ∂Ax + ∂Ay + ∂Az
div A
∂x
∂y
∂z
(A.37)
~ im entsprechenden
Anschaulich gibt die Divergenz die Quellendichte des Vektorfeldes A
Raumpunkt an. Verschwindet die Divergenz in einem Raumpunkt ~r0 , so liegt hier weder
eine Quelle noch eine Sende des Vektorfeldes vor. (Quellen und Senken des elektrischen
Feldes sind die positive und negativen Ladungen: die Feldlinien entspringen den positiven
Ladungen und enden in den negativen Ladungen.)
Beispiel
In einem homogenen Medium ist folgendes Vektorfeld gegeben:
~ = 3 V ~ex + 4z V ~ey + 5 V ~ez
E
m
m2
m
.
(A.38)
Zeigen Sie, dass das Feld im gesamten Raum quellenfrei ist.
~ = ∂Ex + ∂Ey + ∂Ez = 0
div E
∂x
∂y
∂z
∀ x, y, z
(A.39)
Also sind keine Quellen und Senken im gesamten Raumgebiet vorhanden.
Beispiel (Ende)
A.3.3
Rotation
~ y, z) angewendet
Der Differentialoperator Rotation wird auf eine Vektor-Funktion A(x,
und ergibt als Ergebnis eine vektorielle Größe. In kartesischen Koordinaten ist der Diffe-
ANHANG A. MATHEMATISCHE GRUNDLAGEN
53
rentialoperator wie folgt definiert.
~ = ∇×A
~
rot A
∂
(A.40)
Ax
× Ay
Az
~ex ~ey ~ez ∂
∂
∂ = ∂x
∂y
∂z Ax Ay Az ∂Az ∂Ay
= ~ex
−
∂y
∂z
∂Az ∂Ax
−
−~ey
∂x
∂z
∂Ay ∂Ax
+~ez
−
∂x
∂y
=
∂x
∂
∂y
∂
∂z
(A.41)
(A.42)
(A.43)
(A.44)
(A.45)
Im englischsprachigen Raum wird für die Rotation häufig die Bezeichnung curl verwendet.
~ = curl Ã
rot A
(A.46)
~ im entsprechenden
Anschaulich gibt die Rotation die Wirbeldichte des Vektorfeldes A
~
Raumpunkt an. In den Raumbereichen mit rot A 6= 0 liegen Ursachen von Wirbelfeldern!
Beispiel
Berechnen Sie die Wirbeldichte des folgenden Vektorfeldes:
~ = 3 V ~ex + 4z V ~ey + 5 V ~ez
E
m
m2
m
(A.47)
(A.48)
Einsetzen in obige Definition liefert:
~ = −4 V ~ex
rot E
m2
Beispiel (Ende)
.
(A.49)
ANHANG A. MATHEMATISCHE GRUNDLAGEN
A.3.4
54
Quellen- und Wirbelfelder
In den vorherigen Kapiteln haben wir gesehen, dass die Divergenz die Quellendichte und
Rotation die Wirbeldichte eines Feldes angibt.
Wir können daher zwei Arten von Vektorfeldern unterscheiden:
Reines Quellenfeld: Merkmal: Feldlinien beginnen in Quellen und enden in Senken.
(Beispiel: Elektrostatisches Feld, das positiven Ladungen entspringt und in negativen
Ladungen endet.)
Reines Wirbelfeld: Merkmal: Feldlinien sind geschlossen. (Beispiel: Magnetisches Feld
um einen gleichstromführenden Leiter.)
Mathematisch kann man mit Hilfe der Operatoren Divergenz und Rotation überprüfen,
ob einer dieser reinen Feldformen vorliegt. Ein reines Quellenfeld zeichnet sich dadurch
aus, dass gilt:
~ = 0
rot X
∀ ~r ,
(A.50)
d.h. die Wirbeldichte verschwindet im gesamten Raum.
Ein reines Wirbelfeld zeichnet sich dadurch aus, dass gilt:
~ = 0
div X
∀ ~r ,
(A.51)
d.h. die Quellendichte verschwindet im gesamten Raum.
~ Q und
Allgemein kann ein Feld immer als Überlagerung eines reines Quellenfeldes X
~ W dargestellt werden:
eines reinen Wirbelfeldes X
~ = X
~Q + X
~W
X
A.3.5
.
(A.52)
Laplace-Operator
Der Laplace-Operator (oder auch Delta-Operator ist (angewendet auf eine skalare Funktion) folgendermaßen definiert:
∆φ = ∇ · (∇φ) = div (grad φ)
(A.53)
In kartesischen Koordinaten ergibt sich folgender Ausdruck:
∆φ =
∂ 2φ ∂ 2φ ∂ 2φ
+
+ 2
∂x2 ∂y 2
∂z
.
(A.54)
Hilfblatt 1 zeigt die Auswertung des Laplace-Operators in Zylinder- und Kugelkoordinaten.
Informationen zur Auswertung des Laplace-Operators angewendet auf einen Vektor
finden sich auf Seite 29.
Beispiel
ANHANG A. MATHEMATISCHE GRUNDLAGEN
55
Gegeben ist folgende Potentialfunktion (Potential einer Raumladungskugel):
ρ0 r03 1
·
für r > r0
3ε0 r
φ(r) =
2
ρ0
r
r02 −
für r ≤ r0
2ε0
3
(A.55)
Aufgabe: Berechnen Sie ∆φ in Kugelkoordinaten.
Die Potentialfunktion φ hat nur eine r-Abhängigkeit:
1 ∂
2 ∂φ
∆φ = 2
r
r ∂r
∂r
(A.56)
1. Berechnung für r > r0 :
Einsetzen:
3
1 ∂
ρ0 r0 1
2 ∂
·
∆φ = 2
r
r ∂r
∂r 3ε0 r
ρ0 r03 1 ∂ 2 1 r −
=
3ε0 r2 ∂r | {zr2 }
(A.57)
(A.58)
=−1
|
{z
}
=0
= 0
(A.59)
2. Berechnung für r ≤ r0 :
Einsetzen:
2
1 ∂
ρ0
2 ∂
2r
∆φ = 2
r
· −r0
r ∂r
∂r 2ε0
3
ρ0 1 ∂ 2
2r
r −
=
2
2ε0 r ∂r | {z 3 }
2
= − r3
3
ρ0
= −
ε0
(A.60)
(A.61)
(A.62)
Was bedeuten die Ergebnisse nun anschaulich? Der Laplace-Operator ist ja nichts anderes als die Nacheinanderanwendung des Gradient-Operators und des Divergenz-Operators:
∆φ = div (grad φ)
.
(A.63)
Die Operation grad φ ergibt die elektrische Feldstärke (jedoch mit negativen Vorzeichen).
~ = −grad φ
E
(A.64)
ANHANG A. MATHEMATISCHE GRUNDLAGEN
56
Die Divergenz der elektrischen Feldstärke (mit negativen Vorzeichen) schließlich ergibt die
Quellendichte des elektrischen Feldes, die - wie wir ja zuvor bereits gesehen haben - gleich
dem Quotienten der Raumladungsdichte und der Dielektrizitätskonstante entspricht.
~ = ε0 div E
~ = ρ0
div D
~ = ρ0
div E
ε0
→
(A.65)
Also sind die Ergebnisse verständlich.
Beispiel (Ende)
A.4
Auswertung von Integralen in verschiedenen Koordinatensystemen
In den Maxwell’schen Gleichungen treten Linien-, Flächen-, und Volumenintegrale auf.
Diese Integrale wollen wir wenigstens für einfache Fälle lösen können. Wir beschränken
uns bei den Linienintegralen auf Integrale, bei denen der Integrationsweg mit einer Koordinatenrichtung zusammenfällt. Bei Flächenintegralen soll stets die Flächennormale mit
einer Koordinatenrichtung zusammenfallen.
A.4.1
Linienintegrale
A.4.1.1
Integration in kartesischen Koordinaten
Bild A.6 zeigt den Weg für die Integration. Bei den Wegelementen muss auf Hilfsblatt 1
zurückgegriffen werden (hier dsx = dx).
Abbildung A.6: Geradenstück in kartesischen Koordinaten.
Z
L =
ds =
C
Z3
Z
dsx =
C
3
dx = x = 2 .
1
1
(A.66)
ANHANG A. MATHEMATISCHE GRUNDLAGEN
57
Abbildung A.7: Kreisumfang in Zylinderkoordinaten.
A.4.1.2
Integration in Zylinderkoordinaten
Bild A.7 zeigt den Weg für die Integration (Kreisumfang).
I
I
ds =
U =
C
A.4.1.3
C
R0
Z2π z}|{
Z2π
R dϕ = R0
dsϕ =
dϕ = R0 2π
| {z }
dsϕ
0
.
(A.67)
0
Integration in Kugelkoordinaten
1. Berechnung des Kugelumfangs in der Mitte der Kugel (ϑ = π/2).
Bild A.8 zeigt den Weg für die Integration.
Abbildung A.8: Kugelumfang in Kugelkoordinaten (z = 0 bzw. ϑ = 90◦ ).
I
U =
Z2π
I
ds =
C
r0
z}|{
r sin
ϑ dϕ = r0 2π
|{z}
dsϕ =
(A.68)
=1
0
C
.
(sin ϑ = 1, da ϑ = π/2)
2. Berechnung des Kugelumfangs in der Höhe mit ϑ = π/4.
Bild A.9 zeigt den Weg für die Integration.
I
ds =
U =
C
Z2π
I
dsϕ =
C
0
r0
√
z}|{
r sin
ϑ
dϕ
=
r
2π
0
|{z}
√
=1/ 2
.
(A.69)
ANHANG A. MATHEMATISCHE GRUNDLAGEN
58
Abbildung A.9: Kugelumfang in Kugelkoordinaten (ϑ = 45◦ ).
√
(sin ϑ = 1/ 2, da ϑ = π/4)
3. Berechnung des Kugelumfangs auf einem anderen Weg ϕ = 0 = const..
Bild A.10 zeigt den Weg für die Integration.
Abbildung A.10: Kugelumfang in Kugelkoordinaten.
U
2
I
=
Zπ
I
ds =
C
dsϑ =
C
r0
z}|{
| r {z dϑ} = r0 π
.
(A.70)
dsϑ
0
Daraus folgt:
U = 2πr0
.
(A.71)
A.4.2
Flächenintegrale
A.4.2.1
Integration in kartesischen Koordinaten
Bild A.11 zeigt die Fläche für die Integration. Bei den Flächenelementen muss auf Hilfsblatt 1 zurückgegriffen werden (hier dfz = dx dy).
ZZ
A =
df =
A
Za Zb
ZZ
dx dy = ab .
dfz =
A
0
0
(A.72)
ANHANG A. MATHEMATISCHE GRUNDLAGEN
59
Abbildung A.11: Deckelfläche eines Quaders in kartesischen Koordinaten.
Abbildung A.12: Kreisfläche.
A.4.2.2
Integration in Zylinderkoordinaten
1. Kreisfläche
Bild A.12 zeigt die Fläche für die Integration. Bei den Flächenelementen muss auf
Hilfsblatt 1 zurückgegriffen werden (hier dfz = R dR dϕ).
ZZ
A =
ZR0 Z2π
ZZ
df =
A
dfz =
0
A
1 2 R0
R dR dϕ = 2π · R = πR02
2
0
.
(A.73)
0
2. Mantelfläche eines Zylinders
Bild A.13 zeigt die Fläche für die Integration. Bei den Flächenelementen muss auf
Abbildung A.13: Mantelfläche eines Zylinders.
Hilfsblatt 1 zurückgegriffen werden (hier dfR = R dϕ dz).
ZZ
A =
df =
A
Zh Z2π
ZZ
dfR =
A
R dϕ dz = R0 2πh .
|{z}
0
0
R0
(A.74)
ANHANG A. MATHEMATISCHE GRUNDLAGEN
A.4.2.3
60
Integration in Kugelkoordinaten
Bild A.14 zeigt die Kugeloberfläche für die Integration. Bei den Flächenelementen muss
Abbildung A.14: Kugeloberfläche.
auf Hilfsblatt 1 zurückgegriffen werden (hier dfr = r2 sin ϑ dϑ dϕ).
ZZ
A =
df =
A
=
r02
Z2π Zπ
ZZ
dfr =
0
A
Zπ
· 2π ·
sin ϑ dϑ =
0
=
4πr02
r2 sin ϑ dϑ dϕ
|{z}
0
r02
2πr02
π − cos ϑ
{z 0 }
|
(A.75)
(A.76)
=−(−1−1)=2
.
(A.77)
A.4.3
Volumenintegrale
A.4.3.1
Integration in kartesischen Koordinaten
Bild A.15 zeigt das Volumen für die Integration. Bei den Volumenelementen muss auf
Abbildung A.15: Volumen eines Quaders in kartesischen Koordinaten.
Hilfsblatt 1 zurückgegriffen werden (hier dv = dx dy dz).
Za Zb Zc
ZZZ
V
=
dv =
V
dx dy dz = abc .
0
0
0
(A.78)
ANHANG A. MATHEMATISCHE GRUNDLAGEN
61
Abbildung A.16: Volumen eines Zylinders.
A.4.3.2
Integration in Zylinderkoordinaten
Bild A.16 zeigt das Volumen für die Integration. Bei den Volumenelementen muss auf
Hilfsblatt 1 zurückgegriffen werden (hier dv = R dϕ dz dR).
ZR0 Zh Z2π
ZZZ
V
R dϕ dz dR
dv =
=
0
V
0
0
1 2 R0
= h · 2π · R = hπR02
2
0
A.4.3.3
(A.79)
.
(A.80)
Integration in Kugelkoordinaten
Bild A.17 zeigt das Kugelvolumen für die Integration. Bei den Volumenelementen muss
Abbildung A.17: Volumen einer Kugel.
auf Hilfsblatt 1 zurückgegriffen werden (hier dv = r2 sin ϑ dr dϕ dϑ).
Zπ Z2π Zr0
ZZZ
V
=
dv =
V
0
0
r2 sin ϑ dr dϕ dϑ
(A.81)
0
π 4
1 r0 = 2π · r3 − cos ϑ = πr03
3 0 |
{z 0 } 3
=2
.
(A.82)
ANHANG A. MATHEMATISCHE GRUNDLAGEN
A.4.4
62
Linienintegrale über Vektoren
In Kapitel A.4.1 haben wir gesehen, dass das Linienintegral stets die wahre Länge des
Integrationsweges ergab, also zum Beispiel den Umfang eines Kreises.
Wir wollen nun sehen, was geschieht, wenn wir das Integral über eine vektorielle Größe
ausführen und dieser Vektor in Richtung des Integrationsweges zeigt.
A.4.4.1
Vektor in Richtung des Integrationsweges
Bild A.18a zeigt den Weg für die Integration. Da über eine vektorielle Größe integriert
Abbildung A.18: Integrationsweg und Vektor.
wird, wird das Ergebnis ebenfalls ein Vektor sein:
~ =
L
Zπ
Z
R0 dϕ · ~eϕ
d~s =
C
.
(A.83)
0
Wenn wir das Integral auswerten wollen, treffen wir auf das Problem, dass der Vektor ~eϕ
andauernd seine Richtung ändert! Es ist daher sinnvoll auf das kartesische Koordinatensystem überzugehen, denn bei diesem sind die Einheitsvektoren raumfest, d.h. unabhängig
vom Ort zeigen sie immer in die gleiche Richtung (siehe Bild A.18b).
Bild A.19 zeigt den Übergang von Zylinderkoordinaten in kartesische Koordinaten.
Abbildung A.19: Übergang auf kartesischen Koordinaten.
~eϕ = − sin ϕ ~ex + cos ϕ ~ey
(A.84)
ANHANG A. MATHEMATISCHE GRUNDLAGEN
63
Einsetzen:
~ =
L
Zπ
R0 dϕ · ~eϕ
(A.85)
0
Zπ
= −
Zπ
R0 sin ϕdϕ · ~ex +
0
R0 cos ϕdϕ · ~ey
(A.86)
0
Zπ
Zπ
= −R0~ex
sin ϕ dϕ +R0~ey
|0
{z
=2
}
cos ϕ dϕ
|0
{z
=0
(A.87)
}
= −2R0 ~ex
(A.88)
(Hinweis zur Rechnung: Fläche unter einem Sinusbogen ist 2; Fläche unter der Cosinusfunktion von 0 bis π verschwindet (→ zeichnen!))
Als Ergebnis erhalten wir also einen Vektor, der vom Anfangspunkt zum Endpunkt
zeigt (siehe Bild A.20).
Abbildung A.20: Ergebnisvektor.
Allgemein können wir Folgendes festhalten:
• Wird über einen Vektor integriert und zeigt dieser Vektor stets in Wegrichtung, so
ergibt sich als Ergebnis der gerichtete Abstand von Anfangs- und Endpunkt.
A.4.4.2
Vektor senkrecht zum Integrationsweg
Was geschieht, wenn der Vektor nicht in Wegrichtung zeigt? Die Auswertung erfolgt wie
zuvor in kartesischen Koordinaten, da die Vektoren in diesem Falle ortsfest sind und aus
den Integralen herausgezogen werden können. Der Integrationsweg sei wie zuvor, allerdings
weist der Vektor nun in eine andere Richtung (siehe Bild A.21).
~ =
L
Zπ
Z
R0 dϕ · ~eR
d~s =
C
.
(A.89)
0
Radialer Einheitsvektor durch kartesische Einheitsvektoren ausgedrückt:
~eR = cos ϕ ~ex + sin ϕ ~ey
(A.90)
ANHANG A. MATHEMATISCHE GRUNDLAGEN
64
Abbildung A.21: (a)Integrationsweg und Vektor und (b) Übergang auf kartesische Koordinaten.
Einsetzen:
~ =
L
Zπ
R0 dϕ · ~eR
(A.91)
0
Zπ
Zπ
R0 cos ϕdϕ · ~ex +
=
0
R0 sin ϕdϕ · ~ey
(A.92)
0
Zπ
Zπ
cos ϕ dϕ +R0~ey
= R0~ex
|0
= 2R0 ~ey
{z
=0
}
sin ϕ dϕ
|0
{z
=2
(A.93)
}
(A.94)
Bild A.22a zeigt die wechselnde Richtung des Vektor ~eR längs des Weges. Der Ergebnisvektor zeigt in positive y-Richtung. Anschaulich ist klar: Die x-Komponenten heben sich
auf, die y-Komponenten addieren sich!
Abbildung A.22: (a) Wechselnde Richtung des Vektors längs des Integrationsweges (b)
Ergebnisvektor.
Die anschauliche Interpretation führt dazu, dass sich manche Integrale durch bloßes
Hinsehen lösen lassen. Als Beispiel sei der Integrationsweg von vorhin auf einen vollständigen Kreis ausgeweitet (siehe Bild A.23).
ANHANG A. MATHEMATISCHE GRUNDLAGEN
65
Abbildung A.23: Integrationsweg und Vektor.
~ =
L
Z2π
R0 dϕ · ~eR = 0 .
0
Anschaulich heben sich die Beiträge aller Vektoren in ihrer Gesamtheit auf!
(A.95)
Anhang B
Übungsaufgaben
B.1
Elektrisches Feld einer homogenen Raumladungskugel
Gegeben ist eine homogene Raumladungskugel (Radius r0 ) mit der Raumladungsdichte
(in Kugelkoordinaten):
ρ0 für 0 ≤ r ≤ r0
ρ (r) =
(B.1)
0 für r0 ≤ r ≤ ∞
Bild B.1 zeigt die Verteilung der Raumladung als Funktion des Radius. Die Gesamtladung
Q der Raumladungskugel ergibt sich als Integral der Raumladungsdichte:
ZZZ
4
Q=
ρ0 dv = ρ0 πr03 .
(B.2)
3
V
Abbildung B.1: Raumladungsdichte als Funktion des Radius.
66
ANHANG B. ÜBUNGSAUFGABEN
67
Die elektrische Feldstärke der Raumladungskugel ist in der Aufgabe gegeben:
ρ
0
r
für 0 ≤ r ≤ r0
3ε0
Er (r) =
ρ r3 1
Q
0 0· 2 =
für r0 ≤ r ≤ ∞
3ε0 r
4πε0 r2
(B.3)
Die anderen Komponenten Eϑ und Eϕ seien Null. (Sieht man sich das Feld außerhalb
der Raumladungskugel an, so stellt man fest, dass es mit dem elektrischen Feld einer
Punktladung im Ursprung übereinstimmt, falls die Punktladung und die Gesamtladung
der Raumladungskugel identisch sind.)
Aufgabe: Berechnen Sie die Quellendichte und die Wirbeldichte des elektrischen Feldes!
1. Berechnung der Quellendichte für r ≤ r0 :
~ = div
div E
ρ0
r~er
3ε0
(B.4)
Da die ϑ- und die ϕ-Komponenten des elektrischen Feldes verschwinden, bleibt beim Einsetzen in die Definition des Divergenz-Operators
~ =
div E
1 ∂Eϕ
1 ∂ 2 ∂
1
(Eϑ sin ϑ) +
r Er +
2
r ∂r
r sin ϑ ∂ϑ
r sin ϑ ∂ϕ
(B.5)
nur der erste Term stehen
~ = ρ0 1
div E
3ε0 r2
∂ 2
ρ0
r r =
∂r
ε0
| {z }
(B.6)
=3r2
Die Quellendichte des elektrischen Feldes entspricht also dem Quotienten aus Raumladungsdichte ρ0 und Dielektrizitätskonstante ε0 . Die Aussage kann auch umgestellt werden:
~ = ρ0
ε0 div E
~ = ρ0
div D
(B.7)
(B.8)
~ ist also die RaumladungsdichDie Quellendichte der dielektrischen Verschiebungsdichte D
te ρ0 .
2. Berechnung der Quellendichte für r > r0 :
~ = div
div E
ρ0 r03 1
3ε0 r2
∂ 21
ρ0
r 2 =
∂r r
ε0
| {z }
ρ0 r03 1
~er
3ε0 r2
(B.9)
=0
(B.10)
ANHANG B. ÜBUNGSAUFGABEN
68
Außerhalb der Raumladungskugel ist die Quellendichte gleich Null. Dort liegen also keine
Quellen des Feldes vor.
3. Berechnung der Quellendichte:
Das elektrische Feld enthält nur eine radiale Komponente Er . Diese Komponente selbst
ist nur eine Funktion von r und unabhängig von ϑ und ϕ. Bei Betrachtung der Definition
des Rotationsoperators fällt auf, dass alle Ausdrücke Null werden und die Rotation daher
im gesamten Raum verschwindet. Damit handelt es sich bei dem elektrischen Feld um ein
reines Quellenfeld.
=0
~ =
rot E
~er
r sin ϑ
=0
∂(z}|{
E sin ϑ)
ϕ
∂ϑ
z}|{
∂ Eϑ −
∂ϕ
(B.11)
=0
z}|{
~eϑ 1 ∂Er ∂(r Eϕ ) +
−
r sin ϑ ∂ϕ
∂r
|{z}
(B.12)
z}|{
~eϕ ∂(r Eϑ ) ∂Er +
−
r
∂r
∂ϑ
|{z}
(B.13)
=0
=0
=0
= 0
B.2
(B.14)
Magnetisches Feld eines stromdurchflossenen Leiters
Aufgabe: Berechnen Sie mit Hilfe des Durchflutungsgesetzes die magnetische Feldstärke
eines unendlich langen, gleichstromdurchflossenen zylindrischen Leiters mit dem Radius
r0 . Berechnen Sie anschließend die Wirbeldichte und die Quellendichte im gesamten Raum.
Das Durchflutungsgesetz lautet:
I
~ · d~s =
H
C(A)
ZZ A
~
∂D
~
~
J+
· dA
∂t
|{z}
(B.15)
=0
Aufgrund der Zeitunabhängigkeit des Stromes (Gleichstrom) verschwindet die zeitliche
Ableitung auf der rechten Seite der Gleichung. Aus der Symmetrie der Abordnung und
unserem Vorwissen aus dem Kapitel über die physikalischen Grundlagen folgern wir zunächst, dass es nur eine umlaufende (ϕ-)Komponente gibt (Hr = Hϑ = 0), die den Leiter
umwirbelt (siehe Bild B.2). Wollen wir nun das Durchflutungsgesetz anwenden, so müssen wir uns Gedanken um einen Integrationsweg C(A) bzw. um die Fläche A machen auf
der die Integrale ausgewertet werden sollen. Eine besonders einfache Lösung der Integrale
ergibt sich, wenn längs einer Feldlinie auf einem horizontal liegenden Kreis um den Leiter
ANHANG B. ÜBUNGSAUFGABEN
69
Abbildung B.2: Magnetisches Feld um einen Leiter.
Abbildung B.3: Integrationsweg.
herum integriert wird (siehe Bild B.3). In Zylinderkoordinaten (Wegelement d~s = R dϕ~eφ )
ergibt sich folgende Lösung der Integrals auf der linken Seite des Durchflutungsgesetzes:
I
~ · d~s =
H
C(A)
Z2π
Hϕ R1 dϕ = R1 Hϕ 2π
(B.16)
ϕ
Bei der Auswertung des Integrals auf der rechten Seite muss die Orientierung der Flächennormalen bekannt sein. Zwischen dem Umlaufsinn der Randkurve und der Flächennormalen besteht der Zusammenhang über die Rechte-Hand-Regel, in unserem Fall ist die
Flächennormale also in positive z-Richtung orientiert. Die rechte Seite des Durchflutungs-
ANHANG B. ÜBUNGSAUFGABEN
70
gesetzes ergibt für den Fall R1 ≤ R0 also:
ZZ
~ =
J~ · A
ZR1 Z2π
0
A
Jz dfz
(B.17)
Jz R dϕ dR
(B.18)
0
ZR1 Z2π
=
0
0
ZR1
= Jz 2π
R dR
(B.19)
0
1 R1
= Jz 2π R2 2
0
2
= πR1 Jz
(B.20)
(B.21)
Für den Fall R1 ≥ R0 fließt der gesamte Strom I durch die Fläche und das Integral ergibt:
ZZ
~ = I
J~ · A
(B.22)
A
Mit diesen Vorüberlegungen können wir nun relativ einfach das magnetische Feld innerhalb
und außerhalb des Leiters berechnen.
1. Berechnung innerhalb des Leiters (R ≤ R0 ):
Hϕ 2πR = Jz πR2
(B.23)
Jz
R
2
(B.24)
Daraus folgt
Hϕ =
für R ≤ R0
2. Berechnung außerhalb des Leiters (R > R0 ):
Hϕ 2πR = Jz πR02 = I
(B.25)
Daraus folgt
Hϕ =
Jz R02
I
=
2R
2πR
für R > R0
3. Berechnung der Rotation innerhalb des Leiters (R ≤ R0 ):
(B.26)
ANHANG B. ÜBUNGSAUFGABEN
71
=0
1 ∂ z}|{
Hz
∂Hϕ ~
rot H = ~eR
−
R ∂ϕ
| ∂z
{z }
(B.27)
=0
=0
=0
z}|{
∂ Hz −
+~eϕ
∂z
∂R
=0
z}|{ 1 ∂(RHϕ ) ∂ HR
+~ez
−
R
∂R
∂ϕ
∂ z}|{
H
R
(B.28)
(B.29)
Daraus folgt:
1 ∂(RHϕ ) ~
rot H = ~ez
R
∂R
1 ∂ J ~ez
R R
R ∂R | {z
2 }
(B.30)
(B.31)
= J R2
|
|
{z 2
=JR
{z
=J
}
}
= J~ez
(B.32)
Die Wirbeldichte des magnetischen Feldes im Bereich des Leiters ist die in z-Richtung
~ (Die Stromdichte ist die Ursache des magnetischen Wirbelfeldes.)
fließende Stromdichte J.
4. Berechnung der Rotation außerhalb des Leiters (R > R0 ):
1 ∂(RHϕ ) R
∂R
1 ∂ I0 ~ez
R
R ∂R | 2πR
{z }
~ = ~ez
rot H
(B.33)
(B.34)
I
0
= 2π
|
= 0
{z
=0
}
(B.35)
Die Wirbeldichte verschwindet also außerhalb des Leiters. (Hier liegen also keine Ursachen
für das Wirbelfeld.)
5. Berechnung der Divergenz:
ANHANG B. ÜBUNGSAUFGABEN
72
Abbildung B.4: Zylinderspule mit Integrationsweg.
=0
z}|{
=0
∂
z}|{ 1 ∂Hϕ ∂ Hz
1
~ =
+
div H
(R HR ) +
R ∂R
R ∂ϕ
∂z
| {z }
(B.36)
=0
= 0
(B.37)
Quellendichte ist überall gleich Null. Es handelt sich also um eine quellenfreies Feld. Die
Wirbeldichte ist im Bereich R ≤ R0 von Null verschieden, es ist als ein Wirbelanteil
vorhanden. Insgesamt ergibt sich also ein reines Wirbelfeld.
B.3
Magnetisches Feld und Induktivität einer langgestreckten Zylinderspule
Wir wollen anhand eines weiteren Beispiels zeigen, wie sich mit Hilfe des Durchflutungsgesetzes das magnetische Feld einer gleichstromdurchflossenen Leiteranordnung berechnen
lässt.
Aufgabe: Berechnen Sie das magnetische Feld und die Induktivität einer langgestreckten,
luftgefüllten Zylinderspule mit Hilfe des Durchflutungsgesetzes (Windungszahl n, Länge
l, Durchmesser d mit l >> d). Berechnen Sie anschließend die gesamte im magnetischen
Feld gespeicherte Energie und geben Sie eine Formel für die Induktivität an.
Das Durchflutungsgesetz lautet im zeitunabhängigen Fall:
I
ZZ ~
~ .
H · d~s =
J~ · dA
(B.38)
C(A)
A
Es soll von folgender Vereinfachung ausgegangen werden:
• Das Feld Hi innerhalb der Spule sei konstant.
• Das Feld Ha außerhalb der Spule verschwinde (Ha = 0).
ANHANG B. ÜBUNGSAUFGABEN
73
Wenn wir mit Hilfe des Durchflutungsgesetzes das magnetische Feld berechnen wollen,
müssen wir wie zuvor einen Integrationsweg C(A) finden auf dem das magnetische Feld
konstant - und möglichst in Wegrichtung orientiert - ist. Wir wählen den in Bild B.4
eingezeichneten Weg. Mit dem Weg ist sogleich auch die Fläche A festgelegt. Umlaufsinn
~ sind über die Rechte-Hand-Regel
des Integrationsweges C(A) und Flächennormale dA
miteinander verknüpft.
Die linke Seite des Durchflutungsgesetzes liefert
I
~ · d~s = Hi l .
H
(B.39)
C(A)
Die rechte Seite des Durchflutungsgesetzes liefert
ZZ
~ = nI ,
J~ · dA
(B.40)
A
da der Strom I n-mal durch die Fläche fließt!
Somit ergibt sich mit
Hi l = nI
(B.41)
schließlich
Hi =
nI
l
für R ≤ R0
(B.42)
Wir wollen nun die im magnetischen Feld gespeicherte Energie und die Induktivität
der Spule berechnen.
Die magnetische Energiedichte wm ist gegeben durch
1 ~ 2 1
1~ ~
H · B = µ0 H = µ0 H 2
(B.43)
wm =
2
2
2
Die magnetische Gesamtenergie Wm ergibt sich durch Integration der Energiedichte im
gesamten Raum.
ZZZ
Wm =
wm dv
(B.44)
Z VZ Z
=
1
µ0 Hi2 dv
2
(B.45)
V
1
=
µ0 Hi2 |{z}
Al
2
=V
1 n2 I 2
=
µ0 2 Al
2
l
1 n2 A 2
=
µ0
I
2 | {zl }
=L
2
d
mit A = π
2
(B.46)
(B.47)
(B.48)
ANHANG B. ÜBUNGSAUFGABEN
74
Die neue Größe L ist die Induktivität der langgestreckten, luftgefüllten Zylinderspule und
ist ein Maß für die im Feld gespeicherte Energie.
L=
n2 A
µ0
l
(B.49)
Die Einheit der Induktivität ist [L] = Vs/A = H (Henry).
B.4
Magnetisches Feld einer teilweise gefüllten langgestreckten Zylinderspule
Die zuvor gegebene langgestreckte Zylinderspule sei nun teilweise mit einem (ferromagnetischen) Kern (µr >> 1) gefüllt (siehe Bild. B.5).
Abbildung B.5: Teilweise gefüllte langgestreckte Zylinderspule.
Es gelten die gleichen Vereinfachungen wie im Fall der luftgefüllten Spule:
• Das magnetischen Feld außerhalb der Spule verschwinde (Ha = 0).
• Die magnetische Feldstärke in den den verschiedenen Materialien sein konstant.
Zu berechnen ist die magnetische Feldstärke HL im luftgefüllten Bereich und die magnetische Feldstärke HK im Bereich des Kernmaterials. Die Berechnung soll mit Hilfe des
Durchflutungsgesetzes erfolgen.
Wir wählen den gleichen Integrationsweg wie zuvor und erhalten auf der linken Seite
des Durchflutungsgesetzes:
I
~ · d~s = sHK + (l − s) HL .
H
(B.50)
C(A)
Die rechte Seite des Durchflutungsgesetzes liefert
ZZ
~ = nI
J~ · dA
A
,
(B.51)
ANHANG B. ÜBUNGSAUFGABEN
75
da der Strom I n-mal durch die Fläche fließt! Somit ergibt sich insgesamt
sHK + (l − s) HL = nI
.
(B.52)
Diese Gleichung enthält die zwei Unbekannten HK und HL . Um diese Unbekannten bestimmen zu können, benötigen wir noch eine weitere Gleichung. Diese liefern uns die Stetigkeitsbedingungen: die Normalenkomponente der magnetischen Flussdichte ist stetig:
BK,n = BL,n
.
(B.53)
Da die magnetische Flussdichte nur eine Normalkomponente hat gilt also:
BK = BL
.
(B.54)
Für das magnetische Feld ergibt sich damit
µ0 µK HK = µ0 HL
.
(B.55)
Nun haben wir zwei Gleichungen mit zwei Unbekannten. Einsetzen ergibt:
sHK + (l − s) µK HK = nI
.
(B.56)
Und somit erhalten wir für die magnetische Feld im Luftbereich und im Kernmaterial:
HK =
nI
s + µr (l − s)
HL = µr HK =
µr nI
s + µr (l − s)
(B.57)
(B.58)
Am Ende der Rechnung können wir noch schnell eine Plausibilitätsprüfung durchführen. Für den Fall s → 0 (kein Kernmaterial) müsste die Lösung für HL in das Ergebnis
der letzten Aufgabe übergehen, was sie auch tut.
HL =
B.5
nI
l
für s → 0 .
(B.59)
Anwendung des Biot-Savart’schen Gesetzes auf
einen Kreisstrom
Gegeben sei eine von dem Gleichstrom I durchflossene kreisförmige Zylinderspule in der
~ auf der z-Achse mit
Ebene z = 0 (Radius R0 ). Berechnen Sie das magnetische Feld H
Hilfe des Biot-Savart’schen Gesetzes. Das Biot-Savart’sche Gesetz lautet:
Z
µI
d~s0 × (~r − ~r0 )
~ (~r) = µH
~ =
B
.
(B.60)
4π
|~r − ~r0 |3
C
Die Bedeutung der einzelnen Größen ist in Bild 4.1 dargestellt und .
ANHANG B. ÜBUNGSAUFGABEN
76
Abbildung B.6: Kreisförmige Ringspule in der Ebene z = 0.
I Strom im Linienleiter.
~r Aufpunktsvektor: Ort an dem das Feld berechnet wird.
~r0 Quellpunktsvektor: Ort an dem der Strom fließt. (Es wird über die gestrichenen
Größen integriert.)
d~s0 Wegelement über das integriert wird.
Aufgrund der Geometrie des Problems ist die Verwendung von Zylinderkoordinaten anzuraten.
Für den Aufpunktsvektor (Orte auf der z-Achse) erhalten wir dann:
0
0 = z~ez .
~r =
(B.61)
z
Für den Quellpunktsvektor (Orte auf dem Kreis) ergibt sich:
~r0 = R0~eR
.
(B.62)
(Achtung: Der Vektor ist natürlich nicht konstant, da der radiale Einheitsvektor eine Funktion des Ortes ist!)
Für das Wegelement erhalten wir:
d~s0 = R0 dϕ ~eϕ
.
(B.63)
Hieraus können wir nun das Integral zusammensetzen. Es ergibt sich:
~r − ~r0 = z~ez − R0~eR
q
→ |~r − ~r0 | =
z 2 + R02 .
(B.64)
(B.65)
Für das Kreuzprodukt erhalten wir:
d~s0 × (~r − ~r0 ) = R0 dϕ ~eϕ × (z~ez − R0~eR )
= R0 dϕ ~eϕ × z~ez − R0 dϕ ~eϕ × R0~eR
= R0 z dϕ ~eϕ × ~ez −R02 dϕ ~eϕ × ~eR
| {z }
| {z }
= ~eR
= −~ez
2
= R0 z dϕ ~eR + R0 dϕ ~ez
(B.66)
(B.67)
(B.68)
(B.69)
ANHANG B. ÜBUNGSAUFGABEN
77
Einsetzen in das Biot-Savart’sche Gesetz:
Z
d~s0 × (~r − ~r0 )
I
~
H (~r) =
4π
|~r − ~r0 |3
I
=
4π
C
Z2π
R0 zdϕ
I
~eR +
3/2
2
4π
(z 2 + R0 )
|0
{z
}
(B.70)
Z2π
0
R02 dϕ
~e
3/2 z
(z 2 + R02 )
(B.71)
=0
=
R02
I
~ez
·
2 (z 2 + R02 )3/2
(B.72)
Um das erste der beiden Integrale zu lösen, müssen wir auf kartesische Koordinaten übergehen, wie wir es bereits in Kapitel A.4.4.2 auf Seite 63 über das Integrale getan haben.
Dort hatten wir uns aber bereits überlegt, dass das Integral immer Null ergibt, da bei
Superposition aller Vektoren das Ergebnis verschwindet (siehe Bild A.23 auf Seite 65.)
Z2π
R0 dϕ~eR = 0 .
(B.73)
0
Der Verlauf des magnetischen Feldes Hz auf der z-Achse ist in Bild B.7 dargestellt.
Abbildung B.7: Magnetisches Feldes Hz auf der z-Achse.
ANHANG B. ÜBUNGSAUFGABEN
B.6
78
Paralleldrahtleitung
Gegeben ist eine Paralleldrahtleitung bestehend aus einem linienförmigen Hin- und einem
linienförmigen Rückleiter im Abstand b (siehe Bild B.8). Das magnetische Feld im Abstand
Abbildung B.8: Paralleldrahtleiter.
R von einem Leiters ist:
H =
I
2πR
.
(B.74)
Bei dieser Aufgabe handelt es sich um zwei Leiter, die nun jeweils um +b/2 bzw. −b/2
verschoben sind. Das magnetische Feld des linken Leiters H1 (x) auf der x-Achse lautet
unter Berücksichtigung der Stromflussrichtung:
~ 1 (x) =
H
I
~ey
2π x + 2b
.
(B.75)
Das magnetische Feld des rechten Leiters H2 (x) auf der x-Achse lautet unter Berücksichtigung der Stromflussrichtung:
~ 2 (x) =
H
−I
~ey
2π x − 2b
.
(B.76)
Das Gesamtfeld auf der x-Achse gewinnt man durch Superposition der beiden Feldanteile:
~ = H
~ +H
~2
H
"1
#
I
I
−
~ey
=
b
2π x + 2
2π x − 2b
"
#
b
b
x
−
−
x
+
I
2
2
=
~ey
2
b
2
2π
x − 4
"
#
I
b
=
~ey
2π x2 − b42
(B.77)
(B.78)
(B.79)
(B.80)
Bild B.9 zeigt den Verlauf auf der x-Achse für eine Stromstärke I = 1 A und einen
Leiterabstand b = 8 cm. Die rote Kurve stellt die oben berechnete analytische Lösung dar.
Die blaue Kurve stelle eine numerische Näherungslösung dar.
ANHANG B. ÜBUNGSAUFGABEN
79
Abbildung B.9: Magnetisches Feldes Hy auf der x-Achse.
Das numerische Modell wurde mit dem 3D-Simulationsprogramm Microwave Studio
der Firma CST berechnet. Bild B.10 zeigt zusätzlich noch die Leiteranordnung im Modell
und die magnetische Feldverteilung in einer transversalen Ebene.Die leichten Abweichungen ergeben sich durch numerische Ungenauigkeiten, so wie durch die endlichen Durchmesser der Leiter in der Simulation.
ANHANG B. ÜBUNGSAUFGABEN
80
Abbildung B.10: Numerisches Modell (oben), Vektorplot des magnetisches Feldes (Mitte)
und Contourplot des magnetisches Feldes (unten).
ANHANG B. ÜBUNGSAUFGABEN
B.7
81
Koaxialleitung
Berechnung des magnetischen Feldes einer Koaxialleitung mit dem Durchflutungsgesetz.
Der Querschnitt der Koaxialleitung ist in Bild B.11 gezeigt. Da wir bereits das magnetische
Abbildung B.11: Koaxialleitung.
Feld eines langen zylindrischen Leiters auf diese Art berechnet haben, können wir ein paar
Erkenntnisse und Gedankengänge übernehmen:
• Berechnung in Zylinderkoordinaten.
• Aufgrund der Symmetrie ist HZ = HR = 0
• Aus der Symmetrie ist weiterhin ersichtlich, dass Hϕ auf Kreisen um die z-Achse
konstant ist und nur eine Funktion des Radius ist → Hϕ (R).
Wir wollen bei der Berechnung vier Fälle unterscheiden:
1. Im Inneren des Innenleiters (R ≤ Ri )
2. Im Luftraum zwischen Innen- und Außenleiter (Ri ≤ R ≤ Ra )
3. Im Inneren des Außenleiters (Ra ≤ R ≤ R0 )
4. Jenseits des Außenleiters (R ≥ R0 )
Für die weitere Berechnung wird noch die Stromdichte Ji im Innenleiter und die Stromdichte Ja im Außenleiter benötigt. Die Stromdichten ergeben sich einfach als Quotient der
Stromstärke und der Fläche, auf dem sich der Strom gleichmäßig verteilt.
Ji =
Ja =
I
πRi2
πR02
(B.81)
I
− πRa2
1. Berechnung des Feldes im Innenleiter (R ≤ Ri ):
(B.82)
ANHANG B. ÜBUNGSAUFGABEN
82
Das Durchflutungsgesetz lautet für den Gleichstromfall (∂/∂t = 0)
I
ZZ ~
∂D
~ .
~
~
· dA
H · d~s =
J+
∂t
|{z}
A
C(A)
(B.83)
=0
Hieraus folgt wegen df~ = ~ez und J~ = Ji~ez = const.:
Hϕ 2πR = πR2 Ji
(B.84)
schließlich
Hϕ =
Ji R
IR
=
2
2πRi2
für R ≤ Ri
(B.85)
2. Luftraum zwischen Innen- und Außenleiter (Ri ≤ R ≤ Ra ):
Aus dem Durchflutungsgesetz folgt:
Hϕ 2πR = I
(B.86)
schließlich
Hϕ =
I
Ji Ri2
=
2πR
2R
für Ri ≤ R ≤ Ra
(B.87)
3. Im Bereich des Außenleiters (Ra ≤ R ≤ R0 ):
Aus dem Durchflutungsgesetz folgt:
Z2π ZR
Hϕ 2πR = I −
J~a · df~z
mit df~z = R dϕ dR ~ez
(B.88)
0 Ra
ZR
= I − Ja 2π
RdR
(B.89)
Ra
R
1 2
= I − Ja 2π R
2
Ra
1 2 1 2
= I − Ja 2π R − Ra
2
2
I
2
2
= I−
πR
−
πR
a
πR02 − πRa2
(B.90)
(B.91)
(B.92)
schließlich
I
Hϕ =
2πR
R2 − Ra2
1− 2
R0 − Ra2
für Ra ≤ R ≤ R0
(B.93)
ANHANG B. ÜBUNGSAUFGABEN
83
An den Grenzen ergibt sich
R = R0
→
Hϕ = 0
R = Ra
→
Hϕ =
I
2πRa
(B.94)
.
(B.95)
4. Im Außenbereich (R ≥ R0 ):
Aus dem Durchflutungsgesetz folgt:
Hϕ 2πR = 0
(B.96)
Somit:
Hϕ = 0
für R ≥ R0
(B.97)
Fügt man die Lösungen für die vier Bereiche zusammen, so ergibt sich in Abhängigkeit
der radialen Variable R der in Bild B.12 gezeigte Verlauf für die ϕ-Komponente des magnetisches Feldes. Die rote Kurve stellt die oben berechnete analytische Lösung dar. Die
blaue Kurve stelle eine numerische Näherungslösung dar.
Abbildung B.12: Magnetische Feldstärke Hϕ als Funktion des Abstandes R von der zAchse.
Das numerische Modell wurde mit dem 3D-Simulationsprogramm Microwave Studio
der Firma CST berechnet. Bild B.13 zeigt zusätzlich noch die Leiteranordnung im Modell
und die magnetische Feldverteilung in einer transversalen Ebene. Die leichten Abweichungen ergeben sich durch numerische Ungenauigkeiten, so wie durch die Approximation der
zylindrischen Flächen durch eckige Volumenelemente.
ANHANG B. ÜBUNGSAUFGABEN
84
Abbildung B.13: Numerisches Modell (oben), Vektorplot des magnetisches Feldes (Mitte)
und Contourplot des magnetisches Feldes (unten).
B.8
Selbst- und Gegeninduktivität von zwei Zylinderspulen
Gegeben seien zwei sehr lange koaxiale Zylinderspulen (l1 >> R1 und l2 >> R2 ) mit den
Windungszahlen n1 bzw. n2 . In Spule 1 fließe der Strom I1 und in Spule 2 der Strom I2 .
Die Anordnung ist in Bild B.14 dargestellt.
a) Berechnen Sie die gesamte magnetische Feldenergie unter der Annahme, dass das
Feld im Inneren einer langgestreckten Spule konstant ist und außerhalb der Spule
verschwindet (Ha = 0).
b) Berechnen Sie die Selbstinduktionskoeffizienten L1 und L2 so wie den Gegeninduktionskoeffizient M .
ANHANG B. ÜBUNGSAUFGABEN
85
Abbildung B.14: Koaxiale Zylinderspulen.
Die magnetische Feldstärke im Innern einer langgestreckten Zylinderspule wurde bereits mit dem Durchflutungsgesetz ermittelt und lautet:
Hi =
nI
l
.
(B.98)
Die Gesamtenergie berechnet sich allgemein aus dem Volumenintegral über die magnetische Energiedichte:
ZZZ
wm dv
(B.99)
Wges =
Z VZ Z
=
1 ~ ~
µ0 H · H dv
2
(B.100)
V
In der Aufgabe ergibt sich das zu berücksichtigende magnetische Feld durch die Überlage~ 1 und H
~ 2 der Spulen. Im Inneren von Spule 1 ist das magnetische
rung der Einzelfelder H
Feld
~ 10 = H
~1 + H
~2
H
(B.101)
und im Inneren von Spule 1
~0 = H
~2
H
2
.
(B.102)
Die Feldverteilung ist in Bild B.15 schematisch dargestellt.
Bei der Auswertung der Volumenintegrale benötigen wir einmal das Volumen der Spule 1:
V1 = πR12 l1
(B.103)
sowie das Volumen der Spule 2 vermindert um das Volumen der Spule 1
V20 = πR22 l2 − πR12 l1
.
(B.104)
ANHANG B. ÜBUNGSAUFGABEN
86
Abbildung B.15: Koaxiale Zylinderspulen.
Die Gesamtenergie berechnet sich dann zu:
ZZZ
1 ~ ~
Wges =
µ0 H2 · H2 dv
2
0
V
Z Z2 Z
1 ~
~2 · H
~1 + H
~ 2 dv
µ0 H1 + H
+
2
(B.105)
V1
=
+
=
+
+
=
+
2
1
n2 I2
µ0
V20
2
l2
1
~
~
~
~
~
~
µ0 V1 H1 · H1 + 2H1 · H2 + H2 · H2
| {z }
| {z }
| {z }
2
2
2
n1 n2 I1 I2
n1 I1
n
I
2
2
2
l1 l2
l1
l2
2
2
1
n2 I2
n2 I2
1
µ0
πR22 l2 − µ0
πR12 l1
2
l2
2
l2
2
n1 n2 I1 I2 2
1
n1 I1
1
µ0
πR12 l1 + µ0 2
πR1 l1
2
l1
2
l1 l2
2
1
n2 I2
µ0
πR12 l1
2
l2
2
2
1
n2
1
n1
2
2
µ0
πR2 l2 I2 + µ0
πR12 l1 I12
2
l2
2
l1
|
{z
}
|
{z
}
L2
L1
n1 n2 2
µ0
πR1 l1 I1 I2
l l2
| 1 {z
}
M
(B.106)
(B.107)
Aus dem Vergleich mit
W =
1
1
L1 I12 + M I1 I2 + L2 I22
2
2
(B.108)
ANHANG B. ÜBUNGSAUFGABEN
87
aus Kapitel 4.2.3 ergeben sich die gesuchten Größen zu
n21
l1
n2
L2 = µ0 πR22 2
l2
n
1 n2
M = µ0 πR12
l2
L1 = µ0 πR12
B.9
(B.109)
(B.110)
.
(B.111)
Induktionsgesetz
In einem unendlich langen, geraden, dünnen Draht fließt ein Wechselstrom I(t) =
I0 sin (ωt) auf der y-Achse. Im Abstand x0 vom Draht befinde sich eine rechteckförmige Leiterschleife in der xy-Ebene (siehe Bild B.16), die an einer Seite geöffnet ist.
Abbildung B.16: Lage der Leiterschleife.
Berechnen Sie mit Hilfe des Induktionsgesetzes die in der Leiterschleife induzierte Spannung Uind .
Zunächst einmal erzeugt der Strom im Leiter auf der y-Achse ein zeitabhängiges magnetisches Feld, dessen Betrag mit 1/R abnimmt (R ist der Abstand zum Draht).
~ H(t) =
I0 sin (ωt)
I(t)
=
2πR
2πR
(B.112)
Unter Berücksichtung des Vorzeichens und der Lage ergibt sich:
~ = I0 sin (ωt) (−~ez )
H
2πx
.
(B.113)
Das Induktionsgesetz lautet:
I
~ · d~s = − d
E
dt
C(A)
ZZ
A
~ · dA
~ .
B
(B.114)
ANHANG B. ÜBUNGSAUFGABEN
88
Die linke Seite des Induktionsgesetzes liefert genau die induzierte Spannung, wenn als Integrationsweg die geschlossene Leiterschleife gewählt wird. Geht man von einem idealen
Leitermaterial aus, so liefert nur der Spannungsabfall über der Öffnung im der Leiterschleife einen Beitrag zum Integral, da das elektrische Feld im Leiter verschwindet. Somit
ist die linke Seite gleich der gesuchten induzierten Spannung (siehe Bild B.17):
I
~ · d~s .
Uind =
E
(B.115)
C(A)
Der Umlaufsinn ist so gewählt, dass die Flächennormale ebenso wie das magnetische Feld
in negative z-Richtung weist.
Abbildung B.17: Induzierte Spannung.
Daraus folgt, dass zur Bestimmung der induzierten Spannung nun also das Flächenintegral auszuwerten ist:
ZZ
d
~ · dA
~
µ0 H
(B.116)
Uind = −
dt
A
d
= −
dt
a/2
xZ0 +b Z
µ0 H dy dx
(B.117)
x0 −a/2
d
= −
dt
a/2
xZ0 +b Z
µ0
I0
(ωt)2πx dy dx
sin
(B.118)
x0 −a/2
I0 µ0 d
= −
a sin(ωt)
2π |dt {z }
xZ0 +b
1
dx
x
x0
}
ω cos(ωt) | {z
x0 +b
ln x
x
0
I0 µ0
x0 + b
= −
a ln
ω cos(ωt) .
2π
x0
(B.119)
(B.120)
Literaturverzeichnis
[1] Karl Küpfmüller und Wolfgang Mathis. Theoretische Elektrotechnik, Springer Verlag,
2013
[2] Adolf Schwab. Begriffswelt der Feldtheorie, Springer Verlag, 1996
[3] Sigfried Blume. Elektrische und magnetische Felder, Hüthig Verlag, 1987
[4] Gottlieb Strassacker, Roland Süsse, Rotation. Diverenz und Gradient, Teubner Verlag, 2003
[5] Ingo Wolff. Grundlagen und Anwendungen der Maxwellschen Theorie, Springer Verlag, 1997
[6] Pascal Leuchtmann. Einführung in die elektromagnetische Feldtheorie, Pearson Studium, 2005
[7] Nathan Ida. Engineering Electromagnetics, Springer Verlag, 2004
[8] John Kraus, Daniel Fleisch. Electromagnetics with applications, McGraw Hill, 1999
[9] Daniel Fleisch. A Student’s Guide to Maxwell’s Equations, Cambridge University
Press, 2011
89