Praktikum für Fortgeschrittene Versuch 2 - RWTH
Werbung

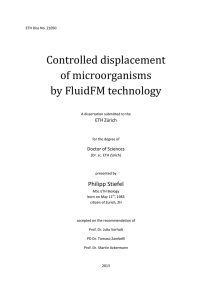
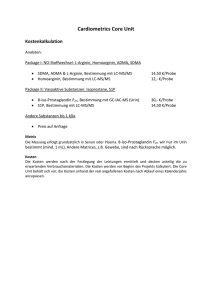
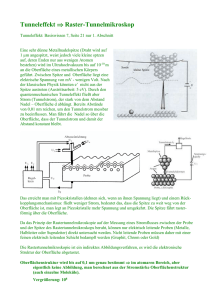
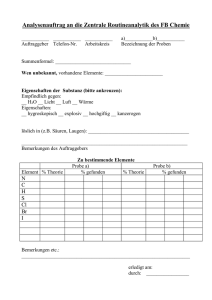
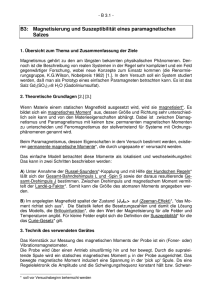
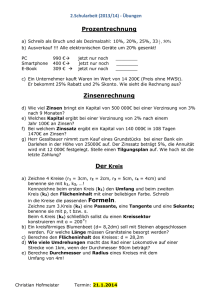
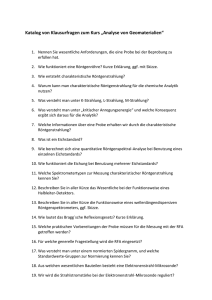
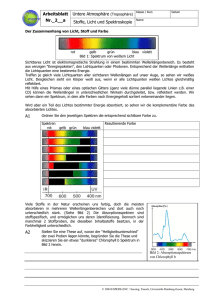
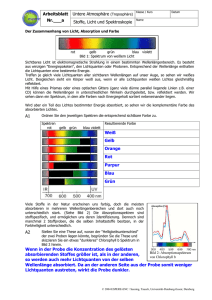
Praktikum für Fortgeschrittene Versuch 2: Rasterkraftmikroskopie II. Physikalisches Institut B, RWTH Aachen 12. März 2013 Inhaltsverzeichnis 1 Einleitung 2 2 Kräfte 2.1 Van-der-Waals-Wechselwirkung 2.2 Chemische Bindung . . . . . . 2.3 Wasser . . . . . . . . . . . . . 2.4 Kontakt . . . . . . . . . . . . 2.5 Reibung . . . . . . . . . . . . 2.6 Magnetostatik . . . . . . . . . 2.7 Elektrostatik . . . . . . . . . . 3 4 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 3 4 4 5 6 7 8 Grundlagen der Rasterkraftmikroskopie 3.1 Rastereinheit . . . . . . . . . . . . 3.2 Cantilever . . . . . . . . . . . . . . 3.3 Detektion der Cantileverauslenkung 3.4 Harmonischer Oszillator . . . . . . . 3.5 Abstandsregelung . . . . . . . . . . 3.6 Lock-In-Verstärker . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 10 10 11 13 15 16 . . . . . . 17 17 18 19 20 20 20 . . . . . . . . 21 21 22 23 23 23 24 24 24 Messmethoden 4.1 Kontaktmodus . . . . . . . . . 4.2 Kraft-Abstands-Messungen . . 4.3 Dynamischer Modus . . . . . . 4.4 Amplituden-Abstands-Kurve . 4.5 Amplituden-Spannungs-Kurve . 4.6 Fly-Modus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Das Anfatec Level AFM 5.1 Aufbau . . . . . . . . . . . . . . . 5.2 Software . . . . . . . . . . . . . . 5.2.1 Crosshairs . . . . . . . . . 5.2.2 Scan Parameter . . . . . . 5.2.3 Automatische Annäherung 5.2.4 Spectroscopy . . . . . . . 5.2.5 DNC . . . . . . . . . . . . 5.2.6 Weitere Optionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 7 Durchführung und Aufgaben 6.1 Kontaktmodus . . . . . . . 6.2 Kraft-Distanz-Kurven . . . 6.3 Dynamischer Modus . . . . 6.4 Magnetkraftmikroskopie . 6.5 Auswertung und Protokoll . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Fragen zur Selbstkontrolle 24 24 24 25 25 25 26 Abbildungsverzeichnis 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 1 Van-der-Waals-Wechselwirkung . . . . . . . . Meniskus . . . . . . . . . . . . . . . . . . . . Gecko . . . . . . . . . . . . . . . . . . . . . Oberflächen im Kontakt . . . . . . . . . . . Magnetkraftmikroskopie . . . . . . . . . . . Kontaktpotenzialdifferenz . . . . . . . . . . . Funktionsweise eines Rasterkraftmikroskops . Cantilever . . . . . . . . . . . . . . . . . . . Lichtzeigerprinzip . . . . . . . . . . . . . . . Resonanzkurven des harmonischen Oszillators Resonanzkurven im Kraftfeld . . . . . . . . . Regelkreis . . . . . . . . . . . . . . . . . . . Spitze im Kontakt . . . . . . . . . . . . . . . Kraft-Abstands-Kurve . . . . . . . . . . . . . Dynamischer Modus . . . . . . . . . . . . . . Amplituden-Abstands-Kurve . . . . . . . . . Amplituden-Spannungs-Kurve . . . . . . . . . Anfatec AFM . . . . . . . . . . . . . . . . . Mikroskopkörper . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 5 5 6 7 8 9 11 12 13 15 16 18 18 19 20 21 22 22 Einleitung Seit der ersten Realisierung des Rastertunnelmikroskops 1981 durch Binnig und Rohrer [1] hat sich im Bereich der Oberflächenphysik eine Vielzahl von Rastersondentechniken mit einem breiten Anwendungsbereich entwickelt. Allen diesen Techniken ist gemeinsam, dass die Oberfläche einer Probe durch eine sehr feine Spitze zeilenweise abgetastet (gerastert) und die Wechselwirkung zwischen Spitze und Probe ortsabhängig gemessen wird. Mit Hilfe einer Datenaufnahmeelektronik entsteht auf diese Weise eine Karte der Wechselwirkung W (x,y ). Das erste Beispiel für eine solche Wechselwirkung war der quantenmechanische Tunnelstrom (s. Anleitung Rastertunnelmikroskopie). Für die Entwicklung des Rastertunnelmikroskops erhielten Binnig und Rohrer 1986 den Nobelpreis. Im selben Jahr wurde ebenfalls durch Binnig et al. [2] das erste Rasterkraftmikroskop (engl.: AFM für atomic force microscope) realisiert. Dabei wird ein mikroskopisch kleiner Federbalken (engl.: cantilever), an dessen freiem Ende eine Spitze integriert ist, über die Probe gerastert. Die auftretenden Kräfte verbiegen den Cantilever, und diese Verbiegung kann mit verschiedenen Detektionsmechanismen gemessen werden. Im Gegensatz zur Rastertunnelmikroskopie ist diese Methode auch zur Untersuchung von Isolatoren geeignet. Für die Wechselwirkung kommen ganz unterschiedliche Mechanismen in Frage: Van-der-Waals- und chemische Wechselwirkung, Elektrostatik, Magnetostatik, Kapazität, Leitfähigkeit, Reibung und andere mehr. Je nach Art der Wechselwirkung und Qualität 2 des Instruments kann damit eine räumliche Auflösung bis in den atomaren Bereich erzielt werden. Einige dieser Wechselwirkungen sollen in diesem Versuch verwendet werden. Ziel ist es, die breiten Anwendungsmöglichkeiten eines Rasterkraftmikroskops an einigen Beispielen kennenzulernen und dabei die Abbildungseigenschaften sowie die Identifizierung der jeweiligen Wechselwirkungen zu studieren. Zum Einsatz kommen die topographische Abbildung im Kontaktmodus und mit oszillierendem Cantilever sowie magnetische und elektrische Kraftmikroskopie. Dazu steht ein AFM der Firma Anfatec mit optischer Detektion der Auslenkung zur Verfügung. Diese Versuchsanleitung soll das notwendige Wissen zur Durchführung des Versuches bereitstellen. Für weitere Informationen über Theorie und Anwendungen der Rastersondenmethoden sei auf die Literatur verwiesen [3]. 2 Kräfte Bringt man zwei makroskopiesche Objekte zusammen, so wirken zwischen ihnen sehr unterschiedliche Kräfte, die verschiedene Größenordnungen und Abstandsabhängigkeiten besitzen. Dadurch lassen sich u.U. ihre jeweiligen Beiträge voneinander separieren. Einige dieser Kräfte (magnetische und elektrische) können auch gezielt durch äußere Felder oder durch Anlegen einer Spannung manipuliert werden. Auf diese Weise können viele physikalische Eigenschaften der Probe ortsaufgelöst gemessen werden. Die Abbildung der Topographie ist also nur eine der Möglichkeiten des AFM. In diesem Abschnitt sollen die maßgeblichen Kräfte in der Rasterkraftmikroskopie diskutiert werden. 2.1 Van-der-Waals-Wechselwirkung Die Van-der-Waals-Wechselwirkung beschreibt die Anziehung von Atomen und Molekülen durch wechselseitig induzierte elektrische Dipolmomente. Da selbst bei einer abgeschlossenen Elektronenschale das Dipolmoment nur im zeitlichen Mittelwert verschwindet, können vorübergehend fluktuierende Diplomomente entstehen, die wiederum Nachbaratome polarisieren können. Dieser Mechanismus führt zu einem attraktiven Wechselwirkungspotenzial VvdW = −C/r 6 . Bei abnehmendem Abstand setzt schließlich die Abstoßung der Atomrümpfe ein. Um diesen Beitrag zu simulieren, führt man einen repulsiven Term mit der willkürlichen Abstandsabhängigkeit ∝ r −12 ein und gelangt so zum Lennard-Jones-Potenzial, das die Wechselwirkung zwischen zwei Atomen beschreibt: VLJ = − C B + . r 6 r 12 (1) Ein typischer Potenzialverlauf ist in Abb. 1 gezeigt. Für die Berechnung der resultierenden Kraft auf eine Spitze im Abstand x0 über der Probe muss über alle Atompaare summiert werden. Bei der Hamaker-Integration ersetzt man die Summe durch ein Integral und führt eine Anzahldichte ρs der Atome ein. Für ein Atom im Abstand r über der Probenoberfläche ergibt sich für den attraktiven Teil der Wechselwirkung1 : πCρs VAtom−Probe (r ) = − 3 . (2) r Alle Atome der Spitze in diesem Abstand liefern den gleichen Beitrag. Nun kann über alle Querschnitte A(h) der Spitze integriert werden [4]: Z πCρs ρt H A(h) dh , (3) Vts = − 3 6 0 (x0 + h) wobei H die Höhe der gesamten Spitze bezeichnet. Der Term vor dem Integral wird auch als Hamaker-Konstante bezeichnet. Die Funktion A(h) ist durch die Spitzengeometrie gegeben; beispielsweise ist A ∝ h für parabolisch geformte Spitzen und A ∝ h2 für konische Spitzen. Das führt 1 Der repulsive Teil spielt erst im Kontakt eine Rolle und wird hier vernachlässigt. 3 Abbildung 1: Van-der-Waals-Wechselwirkung. Links: Schematisches Lennard-Jones-Potenzial in willkürlichen Einheiten. Rechts: Variablen zur Beschreibung einer Spitze im Abstand x0 über der Probe. zu einer stärkeren Abstandsabhängigkeit der Kraft bei parabolischen (stumpfen) Spitzen (∝ x0−2 ) im Vergleich zu konischen oder pyramidalen (∝ x0−1 ), d.h. das Abstandsgesetz der Kraft wird durch die Spitzenform bestimmt.2 Der repulsive Teil des Lennard-Jones-Potenzials dagegen sorgt zusammen mit elastischen Eigenschaften für die Kräfte im Kontakt. 2.2 Chemische Bindung Kommt eine Spitze sehr nahe an eine Oberfläche, so dass der Abstand interatomaren Distanzen entspricht, kann es besonders bei hochreinen Oberflächen zur Ausbildung chemischer Bindungen kommen, ähnlich wie sie auch im Festkörper auftreten. Dazu bedarf es allerdings nicht abgesättigter Bindungen auf beiden Seiten, was praktisch nur bei der Präparation von Proben und Spitzen im Vakuum vorkommt. An Luft sind Oberflächen durch dünne Filme von Adsorbaten bedeckt, die für eine Passivierung der meisten Oberflächen sorgen. Deshalb können chemische Bindungen für unsere Zwecke außer Acht gelassen werden. Für die Untersuchung von hochreinen Oberflächen unter wohldefinierten Bedingungen sind sie aber von großem Interesse. 2.3 Wasser Eine besondere Rolle bei den Kräfteverhältnissen im Kontakt oder kurz davor spielt die Anwesenheit von Wasser. Abhängig von der Luftfeuchtigkeit wird jede Oberfläche an Luft von einem bis zu einige nm dicken Wasserfilm benetzt. Dieser bildet bei Anwesenheit einer Spitze einen Meniskus aus (Abb. 2), der die Kraft zwischen Spitze und Probe über die Kapillarkräfte völlig dominieren kann. Die Veränderung des Dampfdrucks durch die Krümmung einer Flüssigkeitsoberfläche bewirkt eine zusätzliche Kondensation im Kontaktbereich, schon bei einer Luftfeuchtigkeit von weit unter 100%. Diese Druckunterschiede führen zu einem Energiegewinn bei Ausbildung eines Meniskus. Daneben gibt es noch Energiebeiträge durch Oberflächenspannung, die aber für gewöhnlich kleiner sind [5]. Für die Größe dieser Kapillarkräfte spielt neben der Luftfeuchtigkeit auch die Form der Spitze und die Kontaktfläche eine große Rolle. Stumpfe Spitzen liefern auch hier einen größeren Beitrag. 2 Die Abstandsabhängigkeit der Kraft lässt sich berechnen, indem man Gl. 3 für eine bestimmte Spitzenform auswertet und nach x0 differenziert (Näherung: x0 H). 4 Abbildung 2: Wasserfilm auf einer Probe unter Umgebungsbedingungen und Bildung eines Meniskus im Kontakt mit der Spitze. Aus [5]. Abbildung 3: Links: Gecko, der sich mit einem Fuß an einer Glasscheibe festhält (Vordergrund) und mikroskopische Aufnahme der lamellaren Struktur der Füße (Hintergrund). Rechts: Rasterelektronenmikroskopisches Bild eines Teils einer Lamelle, die an einen AFM-Cantilever geklebt wurde. Abbildungen aus [6]. Auch in der Natur tritt dieser Effekt auf. Geckos sind in der Lage, fast beliebige Wände hochzulaufen und sich sogar kopfüber an Glascheiben zu halten. Der Grund sind Milliarden feinster Härchen, sog. Spatulae, an seinen Füßen, die nur wenige hundert nm lang sind und über Van-derWaals-Kräfte genügend Adhäsion erzeugen, um den Gecko zu halten. Neuere Untersuchungen [6] haben allerdings gezeigt, dass die Adhäsion in feuchter Luft deutlich besser ist, dass also auch Kapillarkräfte einen signifikaten Anteil haben. Gemessen wurde dieser Effekt mit Hilfe einiger Härchen, die an einen AFM-Cantilever geklebt wurden (Abb. 3). 2.4 Kontakt Der Kontakt zwischen Spitze und Probe ist bei praktisch jedem Messmodus des AFM unter Umgebungsbedingungen unvermeidlich (s. Abschn. 4). Selbst bei Messungen mit oszillierendem Cantilever kommt die Spitze am unteren Umkehrpunkt in Kontakt mit der Probe. Dabei wird die Spitze von den zuvor erwähnten attraktiven Kräften auf die Probe gezogen, und sowohl das Spitzenende als auch die Probe deformieren sich, bis die elastischen Rückstellkräfte die attraktiven Kräfte ausgleichen. Die einfachste Annahme wäre die eines Hookschen Gesetzes, dass also die Bewegung der Spitze linear von der Kraft abhängt, sobald die Spitze in Kontakt kommt: F (z) = −kts · z für 5 Abbildung 4: Mikroskopisches Modell zweier Oberflächen im Kontakt. Aus www.nano-world.org. z < 0 und F = 0 sonst; kts wäre eine kombinierte Kraftkonstante für die spezielle Spitze-ProbeGrenzfläche (Adhäsionseffekte und langreichweitige Kräfte sind hier vernachlässigt). Es zeigt sich aber, dass dieser Ansatz nicht ausreicht. Im nächsten Schritt kann man berücksichtigen, dass die Kontaktfläche mit der Andruckkraft zunimmt. Hertz entwarf dazu das Modell einer Kugel vom Radius R auf einer Oberfläche, wobei nur elastische Kräfte wirken [7]. Das Ergebnis umfangreicher Rechnungen sind folgende Zusammenhänge zwischen der Kraft F , dem Kontaktradius a und der Bewegung δ senkrecht zur Oberfläche: s RF (4) a = 3 Yges δ = 1 Yges = a2 R 3 1 − νs2 1 − νt2 + 4 Ys Yt (5) (6) Der effektive Youngsche Modul Yges setzt sich zusammen aus den Einzelmoduln und Poissonzahlen ν für Spitze und Probe. Die Rechnungen werden noch wesentlich komplizierter, wenn man Adhäsion und abstandsabhängige attraktive Kräfte hinzunimmt. Diese Beiträge führen zu einer Hysterese von F (z). Bei Annäherung an die Oberfläche schnappt die Spitze in den Kontakt und verlässt diesen beim Zurückziehen erst in einer größeren Entfernung. Dieser Effekt wird uns später bei der Aufnahme von Kraft-Distanz-Kurven noch begegnen. 2.5 Reibung Bewegt man zwei makroskopische Oberflächen unter einer Normalkraft relativ zueinander, so ist die Reibungskraft FR proportional zur Normalkraft FN nach dem bekannten Gesetz von Amonton, FR = µFN . Die Reibungskraft ist in sehr guter Näherung unabhängig von der makroskopischen Kontaktfläche. Dieses Gesetz bricht im mikroskopischen Bereich vollständig zusammen. Hier zeigt sich überraschender Weise, dass die Reibung unabhängig von der Andruckkraft und propotional zur Kontaktfläche ist [8]. Der genaue Mechanismus hinter diesen empirischen Gesetzen und besonders die Modellierung des Übergangs von mikroskopischer zur makroskopischer Reibung ist noch immer ein Feld aktiver Forschung, der Tribologie. Einen Einblick erhält man aber, wenn man sich vor Augen hält, dass eine reale Oberfläche niemals perfekt eben ist, sondern eher aussieht wie in Abb. 4. Nur ein geringer Prozentsatz der Flächen ist wirklich im Kontakt. Jeder mikroskopische Kontakt trägt entsprechend seiner Fläche zur Reibung bei, und eine Erhöhung der Normalkraft steigert im wesentlichen die mikroskopische Kontaktfläche und damit auch die makroskopische Reibungskraft. 6 Abbildung 5: Magnetische Spitze über einer ferromagnetischen Probe mit verschiedenen Domänen. Aus der Probenoberfläche tritt ein Streufeld heraus, das auf die Spitze wirkt und den Cantilever auslenkt. Links: Streufeld und Spitzenmagnetisierung antiparallel, repulsive Kraft; rechts: parallele Konfiguration, attraktive Kraft. 2.6 Magnetostatik Die Verwendung magnetisch beschichteter Spitzen bietet die Möglichkeit, die magnetische Struktur der Probe räumlich abzubilden. Abbildung 5 zeigt das Prinzip der magnetischen Abbildung. Eine magnetische Spitze wird über eine Probe bewegt, auf der Domänen, also magnetisch homogen ausgerichtete Bereiche, mit verschiedener Magnetisierungsrichtung verteilt sind. In diesem Fall soll ~ = 0 folgt, dass die ~ ·B die Magnetisierung senkrecht zur Oberfläche stehen. Aus der Bedingung ∇ ~ Normalkomponente des B-Feldes stetig sein muss, dass also ein magnetisches Feld in den Raum über der Probe hinausgreift. Dieses Feld wird Streufeld genannt. Man kann sich dieses Streufeld auch hervorgerufen denken durch magnetische Ladungen ρmag , die durch die räumliche Änderung ~ entstehen: ρmag = −∇ ~ Dabei muss man sich jedoch immer vor Augen ~ · M. der Magnetisierung M halten, dass es keine isolierten magnetischen Ladungen gibt und daher das Integral von ρmag über die gesamte Probe verschwinden muss. Befindet sich die Spitze über einer Domäne mit einer Magnetisierung, die antiparallel zur Spitzenmagnetisierung ausgerichtet ist (blaue Domäne in der Abb.), so steht das Streufeld dem magnetischen Moment der Spitze entgegen. Die Spitze wird abgestoßen, und der Cantilever verbiegt sich nach oben. Bei paralleler Ausrichtung von Magnetisierung und magnetischem Moment wird der Cantilever angezogen. Einen quantitativen Ausdruck für die Kraft liefert die Monopolnäherung. Man kann sich die Spitze als magnetischen Dipol vorstellen, der von zwei Monopolen am unteren und oberen Spitzenende gebildet wird. Da die Spitze normalerweise sehr viel höher ist als typische Domänengrößen, sieht nur der untere Monopol die Domänenverteilung und der obere ein über viele Mikrometer gemitteltes Feld. Die senkrechte Kraft auf die Spitze wird dann dominiert durch den Monopol q am unteren Ende: Fz = qHz , (7) wobei Hz das Streufeld in z-Richtung bezeichnet. Für den dynamischen Modus (s. 4.3) ist die Veränderung k 0 der effektiven Federkonstanten maßgeblich: k0 = ∂Fz ∂Hz =q . ∂z ∂z (8) Man bildet also im dynamischen Modus der Magnetkraftmikroskopie im wesentlichen den Gradienten des Streufeldes über der Probe ab. 7 Abbildung 6: Entstehung der Kontaktpotenzialdifferenz. Links: Bei zwei ungeladenen, isolierten Metallen ist das Vakummniveau das Bezugpotenzial. Im Kontakt gleichen sich die Fermienergien an (Mitte), und ein Potenzialgefälle führt zu einer elektrostatischen Anziehung. Ein entsprechende Gegenspannung beseitigt die Kraft wieder. Aus [9]. 2.7 Elektrostatik Die elektrostatische Anziehung zwischen Spitze und Probe kann man sich veranschaulichen, wenn man einen Plattenkondensator mit der Kapazität C betrachtet. Die Energie eines mit der Spannung U geladenen Kondensators ist E = 21 CU 2 . Die Kapazität hängt neben der Geometrie, also der Fläche und der Form der Elektroden, vom Abstand z zwischen den Platten ab: C = C(z). Leitet man diese Energie nach z ab, so erhält man die Kraft zwischen den Platten: Fel = ∂E 1 ∂C 2 = U . ∂z 2 ∂z (9) Eine Komplikation entsteht durch den Effekt der Kontaktpotenzialdifferenz. Diese tritt dann auf, wenn man Materialien mit unterschiedlicher Austrittsarbeit zusammenbringt. Die Austrittsarbeit Φ ist die Energie, die man mindestens aufbringen muss, um ein Elektron aus dem Festkörper zu entfernen. Sie ist gegeben durch die Differenz zwischen Fermienergie und Vakuumniveau (Abb. 6). Betrachten wir zunächst zwei Metalle, die ungeladen und voneinander isoliert sind (Abb. 6, links). In diesem Fall ist das Vakuumniveau das gemeinsame Bezugspotenzial. Da die Austrittsarbeiten im Allgemeinen verschieden sind, sind die Ferminieveaus nicht identisch. Bringt man zwei Materialien in Kontakt, so werden Elektronen vom Metall 2 zu Metall 1 transferiert, bis sich die Ferminiveaus angeglichen haben, und das gesamte Energieschema verschiebt sich entsprechend (Abb. 6, Mitte). Die Folge ist eine Verschiebung der Vakuumniveaus direkt über den Oberflächen der beiden Festkörper um die Differenz ∆Φ der Austrittsarbeiten, die Kontaktpotenzialdifferenz. Ein Gefälle des elektrostatischen Potenzials ist aber nichts anderes als ein elektrisches Feld E ≈ ∆Φ/d, wobei d der Abstand zwischen beiden Oberflächen ist. Dieses Feld ist durch die Ladungsverschiebung entstanden und führt zu einer attraktiven elektrostatischen Kraftwechselwirkung zwischen Spitze und Probe. Diese verschwindet erst dann, wenn die Kontaktpotanzialdifferenz durch eine entsprechende Gegenspannung U = ∆Φ/e ausgeglichen wird (im Bild rechts). In Gl. 9 muss also U modifiziert werden: ∂E 1 ∂C = (U − ∆Φ/e)2 . (10) Fel = ∂z 2 ∂z Diese Kraft wird häufig übersehen und kann in Konkurrenz zur magnetischen Wechselwirkung treten, da auch sie langreichweitig ist. Ebenso kann dieser Effekt zu Bildartefakten führen, wenn man Materialien mit unterschiedlicher Austrittsarbeit in demselben Bild untersucht, z.B. dünne Schichten auf einem Substrat. Das Problem einer quantitativen Auswertung im Rasterkraftmikroskop ist, einen Ausdruck für die Kapazität zu finden. Für zwei metallische Körper hoher Ladungsträgerdichte, bei denen die Ladungen in sehr guter Näherung an der Oberfläche liegen, ist die Geometrie der Hauptfaktor. Bei Halbleitern allerdings stehen nicht genügend Ladungsträger zur Verfügung, um das Feld vom 8 Abbildung 7: Funktionsweise eines Rasterkraftmikroskops. Ein Regelkreis sorgt durch Veränderung des Cantilever-Probe-Abstandes während der Rasterbewegung für ein konstantes Auslenkungssignal. Auslenkung und Stellwert werden elektronisch ausgelesen. Inneren der Probe abzuschirmen. Es entstehen Raumladungszonen, wie man sie auch vom pnÜbergang einer Diode her kennt. In diesen Raumladungszonen verbiegen sich die Energiebänder so, dass Bereiche der Verarmung oder Akkumulation von Ladungsträgern entstehen. Die Eindringtiefe des elektrischen Feldes ist umso größer, je geringer die Ladungsträgerdichte3 ist, beim Halbleiter also näherungsweise die Anzahldichte der Dotieratome. Generell lässt sich sagen, dass eine höhere Ladungsträgerdichte, z.B. durch eine unterschiedliche Dotierung, eine größere Kapazität bewirkt, da die Raumladungszonen kleiner sind und deshalb der mittlere Abstand entgegengesetzter Ladungen geringer ist. Damit hat man mit elektrostatischer Kraftmikroskopie die Möglichkeit, verschieden dotierte Bereiche mit hoher räumlicher Auflösung zu identifizieren. Dies ist für die Halbleiterindustrie von großem Interesse. 3 Grundlagen der Rasterkraftmikroskopie Das Prinzip der Rasterkraftmikroskopie ist in Abb. 7 dargestellt. Die Probe befindet sich auf einem Halter, der mit Hilfe von piezoelektrischen Stellelementen lateral und vertikal bewegt werden kann. Über der Probe ist der Cantilever auf einer Halterung montiert. Wird nun die Probe unter dem 3 Metalle und Isolatoren sind Grenzfälle dieser Überlegung: Bei Metallen liegt die Dicke dieser Zone wegen der hohen Ladungsträgerdichte im Bereich von Atomabständen, beim Isolator geht sie gegen unendlich, da praktisch keine Ladungsträger vorhanden sind. 9 Cantilever hindurch bewegt, verbiegt sich dieser aufgrund der Wechselwirkung zwischen Spitze und Probe. Diese Auslenkung ist ein Maß für die auf ihn wirkende Kraft. Sie kann über die Ablenkung eines Laserstrahls, piezoresistiv, piezoelektrisch oder interferometrisch bestimmt werden (s. Abschn. 3.3). Das Auslenkungssignal, oder allgemeiner das Wechselwirkungssignal, kann über einen Regelkreis (Feedback) auf die piezoelektrische Abstandsregelung rückgekoppelt werden, so dass eine konstante Auslenkung, die als Sollwert vorgegeben ist, eingehalten wird (statischer Modus). Es gibt auch die Möglichkeit, den Cantilever zu einer Schwingung mit seiner Eigenfrequenz anzuregen (dynamischer Modus). Dann kann man die Änderung des Schwingungsverhaltens als Funktion der Wechselwirkung aufzeichnen. Beide Messmodi werden in diesem Versuch zur Anwendung kommen. Im Folgenden werden die wichtigsten Komponenten dieses Rasterkraftmikroskops vorgestellt. 3.1 Rastereinheit Die meisten Rastersondenmikroskope verwenden zur Bewegung der Probe piezoelektrische Stellelemente, häufig aus PZT (Blei-Zirkonat-Titanat). Dabei handelt es sich um Kristalle, die aufgrund ihrer Symmetrie (polare Achse) bei mechanischer Deformation eine elektrische Polarisation erzeugen. Grund ist die unterschiedliche Bewegung der einzelnen Atomsorten innerhalb der Einheitszelle. Besitzt der Kristall auch ohne äußeren Druck eine permanente elektrische Polarisation, so spricht man zusätzlich von Ferroelektrizität. Der piezoelektrische Effekt ist umkehrbar, d.h. ein angelegtes äußeres Feld wird den Kristall deformieren. Nimmt man nun einen solchen Kristall und beschichtet ihn auf einer geeigneten kristallographischen Fläche mit Elektroden, kann man durch Anlegen einer Spannung eine Bewegung erzeugen. Die Sensitivität typischer Piezokristalle liegt im Bereich einiger nm pro Volt und damit in der richtigen Größenordnung für Bewegungen in atomaren Dimensionen. Für den Betrieb werden Spannungen in der Größenordnung von 100 V verwendet. Die einfachste Möglichkeit, eine dreidimensionale Bewegung zu erzeugen, ist die Verwendung je eines Piezokristalls pro Raumrichtung. Dies ist auch in dem vorliegenden AFM so realisiert; jedoch wird hier über einen Hebelmechanismus der laterale Hub der Probe bis auf 30 µm vergrößert. Ähnlich einem Ferromagneten zeigen auch ferroelektrische Materialien eine Hysterese. Das bedeutet, dass die tatsächliche Auslenkung nicht nur von der momentan anliegenden Spannung, sondern auch von der Vorgeschichte abhängt. Davon abgesehen reagiert ein Piezokristall auf einen plötzlich angelegten Spannungssprung mit einer schnellen Auslenkung, gefolgt von einem langsamen Nachkriechen (Creep), welches einige Minuten lang anhalten kann. Zusätzlich gibt es noch die thermische Drift, eine langsame, irreguläre Bewegung, die hauptsächlich auf die thermisch angeregte Bewegung der ferroelektrischen Domänenwände zurückzuführen ist. Diese Effekte können die Abbildungsqualität signifikant beeinträchtigen, insbesondere nach Veränderungen des Rasterbereiches und der Bildgröße. Alternative Entwicklungen von Rastersondenmikroskopen verwenden neuerdings anstelle von Piezokristallen auch ein elektromechanisches Prinzip ähnlich dem eines Lautsprechers. Mit einer Spulenanordnung und magnetischen Elementen, die an Membranen befestigt sind, kann über den Stromfluss durch die Spulen die Position eingestellt werden. Dabei sind nur geringe Spannungen nötig, allerdings kann durch den höheren Stromfluss auch eine verstärkte Wärmeentwicklung entstehen, die die Stabilität beeinträchtigen könnte. 3.2 Cantilever Die Spitze wird zusammen mit dem Cantilever und einem Trägerchip als eine Einheit mit Hilfe von Ätzprozessen hergestellt und besteht meist aus Silizium oder Siliziumnitrid. Abbildung 8 zeigt zwei elektronenmikroskopische Aufnahmen. Der Cantilever hat Abmessungen von etwa 200×30×5 µm3 , die aber je nach angestrebten Eigenschaften variieren können. Am Ende befindet sich eine ca. 10 µm hohe Spitze, die für besondere Aufgaben noch weiter bearbeitet werden kann (Metallbeschichtung 10 Abbildung 8: Zwei elektronenmikroskopische Aufnahmen eines Cantilevers. Die linke Aufnahme zeigt den Cantilever-Chip, die rechte das Ende des Cantilevers, an dem die Spitze integriert ist. Aufnahmen der Firmen µmasch und Nanosensors. für elektro- oder magnetostatische Messungen, Nachschärfen durch Ionenbeschuss oder Elektronenstrahldeposition für bessere räumliche Auflösung). Das Ende unbehandelter Spitzen hat einen Radius von einigen nm. Inzwischen sind eine Vielzahl von Spitzenformen und Beschichtungen kommerziell erhältlich. Charakteristisch für einen Cantilever ist insbesondere seine Federkonstante k. Sie lässt sich aus den geometrischen Abmessungen (Länge L, Breite w , Dicke t) und dem Elastizitätsmodul (E = 110 GPa für Silizium) berechnen [10]: k= Ew t 3 4L3 (11) Mit den oben angegebenen Dimensionen kommt man auf Federkonstanten von einigen N/m. Die Eigenfrequenz f0 ergibt sich aus dem bekannten Ausdruck für einen harmonischen Oszilator (2πf0 )2 = k/m∗ , hier modifiziert durch die effektive Masse m∗ = 0,2427ρLw t: s t E f0 = 0,1615 · 2 (12) L ρ mit der Dichte ρ = 2340 kg/m3 für Silizium. Normalerweise sind die Federkonstanten nur ungefähr bekannt, da eine Kalibrierung einzelner Cantilever sehr aufwändig wäre. Wenn man davon ausgeht, dass die größte Unsicherheit durch Variationen der Dicke zustande kommt, kann man dennoch versuchen, die Federkonstante aus der einfacher zu messenden Resonanzfrequenz abzuschätzen. Löst man obige Gleichung nach t auf und setzt diesen Ausdruck in Gl. 11 ein, so erhält man: r ρ3 3 3 k = 59,32w L f0 . (13) E Durch Vergleich der nominellen mit der gemessenen Resonanzfrequenz kann man also auf die tatsächliche Federkonstante schließen. 3.3 Detektion der Cantileverauslenkung Um die Kraft zwischen Probe und Cantilever bestimmen zu können, muss dessen Auslenkung gemessen werden. Beim ersten Rasterkraftmikroskop befand sich über dem Cantilever eine Tunnelspitze auf einem weiteren Piezo. Nach dem Prinzip des wenige Jahre zuvor erfundenen Rastertunnelmikroskops4 wurde der Tunnelstrom zwischen Spitze und Cantilever konstant gehalten und so die Auslenkung bestimmt. Dieser Aufbau erfordert praktisch zwei Mikroskope in einem Aufbau und ist 4 s. Versuchsanleitung Rastertunnelmikroskopie. 11 Abbildung 9: Prinzip des Lichtzeigers. Ein Laserstrahl wird über den Cantilever auf ein Photodiodenfeld reflektiert. Die Intensitäten auf den Photodioden lassen sich in horizontale Auslenkung und Torsion des Cantilevers umrechnen. Bild: Universität Ulm. kompliziert in der Justage der Tunnelspitze. Hinzu kommen eine starke Empfindlichkeit auf Verunreinigungen auf der Cantilever-Rückseite und zusätzliche Kräfte durch die Wechselwirkung zwischen Cantilever und Tunnelspitze. Dieses Verfahren hat sich verständlicherweise nicht durchgesetzt. Eine attraktive Methode wäre, die Auslenkung durch den Cantilever selbst zu messen. Dazu gibt es im wesentlichen zwei Möglichkeiten: piezoresistiv und piezoelektrisch. Bei der piezoresistiven Detektion wird ausgenutzt, dass sich der Widerstand bestimmter Materialien (z.B. Silizium) unter Zug- oder Druckspannungen ändert. Diese Änderung kann über eine Brückenschaltung nachgewiesen werden. Dieser Aufbau ist sehr kompakt, hat aber den Nachteil eines ständigen Stromflusses durch den Cantilever mit einer entsprechenden Aufheizung, die die Anwendbarkeit dieser Methode stark einschränkt. Die piezoelektrische Detektion funktioniert invers zur Erzeugung der Rasterbewegung. Durch die Auslenkung des Cantilvers entsteht eine elektrische Polarisation, die über Elektroden auf beiden Seiten des Cantilevers gemessen werden kann, entweder als Stromfluss oder als Spannung. Da die Landungen sehr klein sind und durch Leckströme leicht abfließen können, eignet sich diese Methode eigentlich nur zur Messung mit oszillierendem Cantilever. Besonders erwähnt werden sollte hier die Quarz-Tuning-Fork, ein stimmgabelartiger Resonator mit Elektroden, wie er auch in Armbanduhren eingesetzt wird. An dessen Ende können fast beliebige Spitzen angeklebt werden, die dann zur Abbildung dienen. Auf diese Weise sind in den letzten Jahren bei entsprechend sauberen Oberflächen Bilder mit hervorragender atomarer Auflösung erzielt werden.5 Am weitesten verbreitet ist jedoch die Detektion mit optischen Verfahren und hier wiederum das Prinzip des Lichtzeigers (Abb. 9), das auch in diesem Versuch verwendet wird. Ein Laserstrahl aus einer Laserdiode wird auf den Cantilever gelenkt und dort reflektiert, so dass er auf eine Photodiode trifft, die in vier Quadranten aufgeteilt ist. Durch eine geeignete Zusammenschaltung der Quadranten kann sowohl die Ablenkung in vertikaler als auch in horizontaler Richtung gemessen werden, d.h. nicht nur eine Verbiegung sondern auch eine Verkippung des Cantilevers ist nachweisbar. Das ist insbesondere bei der Messung von Reibungskräften interessant. Keine andere Detektionsmethode bietet diese Möglichkeit. Nachteilig könnten sich Interferenzeffekte durch eine zusätzliche Reflexion des Laserlichtes von der Probenoberfläche auswirken. Eine weitere verbreitete optische Methode ist die Interferometrie. Dabei wird das Ende einer 5 www.physik.uni-regensburg.de/forschung/giessibl 12 Abbildung 10: Amplituden- und Phasenresonanzkurve des getriebenen, gedämpften harmonischen Oszillators. Glasfaser, in die das Licht einer Laserdiode eingekoppelt wird, vor die Rückseite des Cantilevers geführt. Das Faserende wird mit einer speziellen Spalttechnik so abgeschnitten, dass es auf der Skala der Lichtwellenlänge eben ist. Das Faserende und der Cantilever bilden nun ein Interferometer: ein Teil des Lichtes wird am Faserende reflektiert, der andere Teil am Cantilever. Das entstehende Interferenzsignal hängt vom Abstand Faser-Cantilever ab und dient als relatives Maß der Auslenkung. Dieses System wird vorwiegend bei Mikroskopen im Vakuum und für tiefe Temperaturen eingesetzt, da das Auslenkungssignal optisch aus der Kammer herausgeführt werden kann und keine Elektronik im Mikroskop platziert werden muss. Andererseits muss die Faser auf wenige µm genau an den Cantilever herangeführt werden, was einen zusätzlichen Justageaufwand bedeutet. Zusammen mit dem Tuning-Fork-Mechanismus liefert diese Methode die besten Resultate. 3.4 Harmonischer Oszillator Die Bewegung des Cantilevers und seine Reaktion auf ein äußeres Kraftfeld lässt sich in guter Näherung durch einen gedämpften harmonischen Oszillator beschreiben. Die für den Versuch wesentlichen Aspekte und Bezeichnungen sollen deshalb hier kurz wiederholt werden. Ein harmonischer Oszillator wird charakterisiert über die Parameter Masse m, Federkonstante k und Dämpfung λ. Wirkt eine statische Kraft, so lenkt sich der Oszillator aus um den Betrag ∆x = F/k aus. Wird der Oszillator von einer periodischen, sinusförmigen externen Kraft angetrieben, lautet die Bewegungsgleichung: mẍ + λẋ + kx = C0 cos(ωt) . (14) Der Ansatz x(t) = A0 cos(ωt − ϕ) (oder komplex) liefert die Amplituden- und die Phasenresonanzkurve (Abb. 10): A0 (ω) = tan ϕ = C0 /m q (ω02 − ω 2 )2 + (2γω)2 2γω − ω2 ω02 (15) (16) mit ω02 = k/m und γ = λ/2m. Für den Fall schwacher Dämpfung (γ ω0 ) ergibt sich die 2 = Resonanzfrequenz, also die Frequenz, bei der die Oszillationsamplitude maximal wird, zu ωres 2 2 ω0 − 2γ ≈ k/m. Häufig wird die Güte Q = ω0 /2γ, verwendet. Nach Q Schwingungen ist die 13 Amplitude der freien Schwingung auf e −π ≈ 0,043 gefallen. Für die Höhe der Resonanz gilt A0 (ωres )/A0 (ω = 0) = Q und für die Breite (A0 (ω)/A0 (ωres ))2 = 1/2 ⇔ ∆ω/ω = 1/Q. Je höher die Güte, umso schärfer und höher ist die Resonanz. Nach Anwerfen der Schwingung braucht das System größenordnungsmäßig die Zeit Q/f0 , um zu einer gleichförmigen Schwingung zu gelangen. Bei Cantilevern an Luft liegt die Güte bei wenigen hundert, im Vakuum kann sie bis auf 105 ansteigen. Nun soll die Bewegungsgleichung um eine abstandsabhängige Kraft F (x) erweitert werden: mẍ + λẋ + kx = C0 cos(ωt) + F (x) . (17) Zusätzlich wird angenommen, dass die Kraft klein ist gegen die Rückstellkraft des Cantilevers und dass die Kraft auf der Skala der Oszillationsamplitude nur schwach variiert, d.h. die Kraft ist „langreichweitig“. Dann bleibt die Schwingung näherungsweise harmonisch, und wir können F (x) ≈ ∂F F (x0 ) + ∂x x=x0 · x + . . . um x0 , den Ruhepunkt des Cantilevers, entwickeln. Definiert man ∂F k = ∂x x=x0 0 (18) und setzt diesen Ausdruck in die Bewegungsgleichung ein, so ergibt sich: mẍ + λẋ + kx mẍ + λẋ + (k − k 0 )x = C0 cos(ωt) + F (x0 ) + k 0 x = C0 cos(ωt) + k · δx (19) Mit keff = k − k 0 und k · δx = F (x0 ) und einer Nullpunktsverschiebung um δx, die einer statischen Verbiegung des Cantilevers entspricht, kann man die Form der ursprünglichen Bewegungsgleichung erhalten: mẍ + λẋ + keff x = C0 cos(ωt) , (20) nur mit dem Unterschied, dass in der neuen Federkonstanten keff die Wechselwirkung mit der Probe enthalten ist. Dabei muss man sich vor Augen halten, dass keff nun vom Ort auf der Probe und vom Abstand abhängt. Die neue effektive Federkonstante bewirkt eine neue Resonanzfrequenz f 0 des Cantilevers: r r r keff k − k0 k 1 k0 k0 0 0 ω = 2πf = = ≈ 1− = ω0 1 − . (21) m m m 2k 2k Damit hat sich die Resonanzfrequenz um den Betrag f0 ∂F ∆f = f − f0 = − 2k ∂x x=x0 0 (22) verschoben. Für ein attraktives Potenzial ist ∂F/∂x > 0 und damit ∆f < 0, für ein repulsives Potenzial ist ∆f > 0. Eine langreichweitige Kraft verursacht also eine Frequenzverschiebung und damit eine Verschiebung der Resonanzkurven, die proportional zum Gradienten der Kraft zwischen Spitze und Probe ist. Eine bezüglich des Abstands konstante Kraft bewirkt dagegen keine Frequenzverschiebung, sondern nur eine statische Verbiegung. Der Verlauf der Resonanzkurven bei einer anziehenden Wechselwirkung ist in Abb. 11 dargestellt. Eine typische AFM-Messung im dynamischen Modus verläuft so, dass die Amplitude für die Abstandsregelung verwendet wird und die Verschiebung der Phase, die mit einem Lock-In-Verstärker (Abschnitt 3.6) gemessen werden kann, aufgezeichnet wird. 14 Abbildung 11: Amplituden- und Phasenresonanzkurve des getriebenen, gedämpften harmonischen Oszillators ohne (schwarz) und mit (grau) anziehender Wechselwirkung. 3.5 Abstandsregelung Die Standardbetriebsart eines Rasterkraftmikroskops (im Kontaktmodus) ist die Abbildung mit konstantem Auslenkungssignal des Cantilevers, also konstanter Verbiegung bzw. Auflagekraft. Dazu muss der Probenhalter mit Hilfe des z-Piezos vom Cantilever weg bzw. zu ihm hin bewegt werden, je nach dem wie die Topographie der Probenoberfläche verläuft. Verantwortlich hierfür ist ein Regelkreis, der das tatsächliche Signal I der Auslenkung mit einem vorher eingestellten Sollwert S vergleicht und aus der Abweichung E = I − S die Ausgleichsbewegung des Abstands ∆z errechnet. Gebräuchlich ist der PID-Regelkreis (für proportional, integral, differential), der in seiner allgemeinsten Form durch Z 1 t dE(t) ∆z(t) = gp E(t) + gi E(τ ) dτ + gd TD (23) TI t−TI dt beschrieben werden kann. Der erste Term ist der Proportionalanteil, der die momentane Abweichung direkt in eine Korrektur umsetzt. Im zweiten, dem Integralteil, wird das Fehlersignal E über eine Zeit TI integriert, d.h. Variationen, die schneller als mit einer Zeitkonstanten TI erfolgen, werden zunehmend schwächer berücksichtigt. Der dritte Term, der Differentialteil, reagiert besonders gut auf schnelle Veränderungen von E und regelt daher am besten sprunghaft veränderliche Signale. Generell bewirken erhöhte Werte der Verstärkungsfaktoren g eine schnelle Reaktion des Regelkreises. Abbildung 12 zeigt die Reaktion des Regelkreises auf eine ideale Stufe in der Topographie in Abhängigkeit von verschieden eingestellten Empfindlichkeiten. Werden diese Faktoren zu klein eingestellt, kann der Regler der Topographie nur unzureichend folgen. Bei zu großer Verstärkung besteht die Gefahr, dass der Regler überschwingt.6 Die Verhältnisse bei einem realen Regler sind sehr viel komplizierter, da sowohl durch die Digitalisierung als auch durch das Gerät selbst Zeitkonstanten eingeführt werden, die eine strikte Trennung der einzelnen Anteile verhindern. In jedem Fall liefert die Betrachtung des Fehlersignals E, also in unserem Fall der Auslenkung des Cantilevers, Hinweise auf die Qualität der Regelung. Überschwingungen zeigen sich z.B. in Wellenmustern und eine zu langsame Regelung in verstärkten Anteilen der Topographie im Fehlersignal. 6 s. auch Anleitung Rastertunnelmikroskopie 15 Abbildung 12: Beispiele für die Reaktion des Regelkreises auf eine ideale Stufe in der Topographie. Links: Regelsignal (z.B. die am z-Piezo anliegende Spannung), rechts das Fehlersignal (z.B. die Auslenkung oder Oszillationsamplitude des Cantilevers). Bei zu niedrig eingestellter Verstärkung (schwarz) braucht der Regler zu lange, um die Stufenhöhe richtig abzubilden. Bei zu hoher Verstärkung kommt es zu Überschwingungen. 3.6 Lock-In-Verstärker Ein AFM kann nicht nur im statischen, sondern auch im dynamischen Modus betrieben werden. Dabei wird der Cantilever zu erzwungenen Schwingungen angeregt und die Amplitude und Phasenlage des Auslenkungssignals relativ zur Anregung gemessen. Dies geschieht mit Hilfe der Lock-InTechnik, die vielfach zur Verstärkung schwacher elektronischer Singale eingesetzt wird. Schwach bedeutet in diesem Zusammenhang, dass das eigentliche Messsignal von Rauschen mit breiter Frequenzverteilung überlagert wird. Der wesentliche Trick besteht darin, das interessierende Signal mit einer bekannten Frequenz zu modulieren und alle Änderungen, die andere Frequenzen aufweisen, zu ignorieren. Nehmen wir für den Anfang an, dass ein Nutzsignal der Frequenz f0 von einem Störsignal einer anderen Frequenz fs überlagert wird: S(t) = A0 cos(2πf0 t) + As cos(2πfs t) . (24) Wir multiplizieren nun dieses Signal S mit einer Referenzschwingung R(t) = cos(2πf0 t), die die gleiche Frequenz wie das Nutzsignal hat: R(t) · S(t) = A0 cos2 (2πf0 t) + As cos(2πf0 t) cos(2πfs t) A0 A0 + cos(4πf0 t) = 2 2 As As + cos(2π(f0 + fs )t) + cos(2π(f0 − fs )t) . 2 2 (25) Dabei wurde verwendet, dass cos2 α = 21 + 12 cos 2α ist. Nun bilden wir den zeitlichen Mittelwert, in dem wir über eine endliche Zeit T integrieren: Z 1 T A0 A0 XLI = R(t) · S(t) dt = + sin(4πf0 T ) (26) T 0 2 T · 8πf0 As + sin(2π(f0 + fs )T ) T · 4π(f0 + fs ) As + sin(2π(f0 − fs )T ) . T · 4π(f0 − fs ) Der Beitrag des Nutzsignals (A0 /2) bleibt konstant, während der Einfluss des Störsignals proportional zu 1/T ist und mit der Länge der Integrationszeit abnimmt. Für T → ∞ bleibt schließlich 16 nur noch der Anteil von S übrig, der die gleiche Frequenz wie R hat. Am letzten Term erkennt man auch, dass Störfrequenzen fs , die nahe bei der Referenzfrequenz f0 liegen, schlechter weggedämpft werden als solche, die deutlich verschieden sind. Nun ist zwar ein reales Messignal mit Störungen ganz unterschiedlicher Frequenz überlagert. An der Effektivität dieses Prinzips ändert das jedoch nichts. Im Allgemeinen wird zwischen dem Nutz- und dem Referenzsignal noch eine Phasenverschiebung ϕ auftreten. Verwendet man zwei um 90◦ verschobene Referenzsignale, R1 = cos(2πf0 t) und R2 = sin(2πf0 t), so kann man analog zu Gl. 25 zwei Integrale XLI und YLI erhalten. Aus deren Auswertung lässt sich sowohl auf die Amplitude A als auch auf die Phasenlage ϕ des Nutzsignals in Bezug auf das Referenzsignal schließen: q 2 +Y2 (27) A = XLI LI tan ϕ = YLI . XLI (28) In unserem Fall wird im dynamischen Modus der Cantilever zu Schwingungen nahe seiner Resonanzfrequenz angeregt. Dieses Anregungssignal spielt die Rolle der Referenzschwingung R. Der Cantilever antwortet mit einer Oszillation, die über das Photodiodenfeld gemessen wird. Diese Messung ist mit Störungen behaftet, z.B. Rauschen der Photodioden oder thermisch angeregte Schwingungen des Cantilevers. Mit Hilfe der Lock-In-Technik lassen sich diese Störungen unterdrücken und die Amplitude und Phasenlage der Cantileverschwingung in Bezug zur Anregung bestimmen. Wie sich eine Kraftwechselwirkung auf diese Messwerte auswirkt, wird in Abschnitt 3.4 gezeigt. 4 Messmethoden Wie schon mehrfach angedeutet, kann ein Rasterkraftmikroskop in verschiedenen Betriebsarten verwendet werden. Welche Methode die größte Sensitivität hat, hängt von der Art der Wechselwirkung ab. Hier sollen drei Verfahren beschrieben werden: Die Messung mit statischer Cantileverauslenkung im Kontakt, die dynamische Methode, bei der der Cantilever zu Schwingungen angeregt wird, und der Fly-Modus, in dem die Schwingungseigenschaften in einem Abstand von der Probenoberfläche gemessen werden.7 4.1 Kontaktmodus Der Kontaktmodus ist die einfachste Betriebsart des AFM. Die Probe wird solange auf die Spitze zubewegt, bis diese auf die Oberfläche trifft und so der Cantilever aus seiner Ruhelage ausgelenkt wird. Je stärker die Auslenkung ∆z, umso größer ist die Kraft, mit der die Spitze auf die Probe drückt: Fc = k ·∆z. Indem man für eine Messung die Auslenkung des Cantilevers als Sollwert vorgibt, kann man also die Andruckkraft bestimmen, vorausgesetzt, man kennt die Federkonstante k. Für die wahre Kraft an der Kontaktfläche muss man eine zusätzliche Kraft Fadh berücksichtigen, die durch Adhäsionseffekte (Wasserfilm, anziehender Teil der Van-der-Waals-Wechselwirkung) hervorgerufen wird: Fges = Fadh +Fc . Die Auslenkung liefert also nur einen unteren Grenzwert für die Gesamtkraft. In diesem Messmodus besteht die Kontaktfläche aus mindestens einigen 100 Atomen (Abb. 13). Eine echte atomare Auflösung ist deshalb nicht möglich. Durch den ständigen Kontakt und die sich seitwärts bewegende Spitze nutzt diese relativ stark ab und wird schnell stumpf. Diesen Effekt kann man jedoch auch ausnutzen, um über eine seitliche Verbiegung des Cantilevers auf die wirkenden Reibungskräfte zu schließen. Leider hat die Spitze auch die Tendenz, aufliegende kleine Objekte, die man evtl. abbilden möchte, einfach wegzuschieben. Zur Beurteilung der Sauberkeit 7 Eine Übersicht über verschiedenste Rastersondentechniken mit Animationen findet man auch unter http://www.ntmdt.com/SPM-Techniques/Principles/. 17 Abbildung 13: Simulation einer Spitze im Kontakt mit der Probe. Die Grenzfläche besteht aus eingen 100 Atomen. Abbildung 14: Schematische Kraft-Abstands-Kurve. Bei b −c kommt es zum sogenannten snap-in durch die zunehmenden attraktiven Kräfte. Von c bis f ist die Spitze im Kontakt mit der Probe, und die Verbiegung ∆z folgt direkt der Änderung des Abstands z. Bei f ist die rücktreibende Kraft des Cantilevers gleich der Adhäsionskraft. Bei a − b und g − h befindet sich die Spitze im Bereich der langreichweitigen Van-der-WaalsWechselwirkung, und der Cantilever biegt sich minimal durch. einer Oberfläche ist der Kontaktmodus daher nicht geeignet. Wegen der sehr direkten Beziehung zwischen Auslenkung und Topographie kann die Abbildung im Vergleich mit den anderen Methoden am schnellsten erfolgen. 4.2 Kraft-Abstands-Messungen Eine wichtige Methode zur Messung der im Kontaktmodus beteiligten Kräfte ist die abstandsabhängige Messung der Kraft. Dies geschieht über die Auslenkung ∆z des Cantilevers und seine Kraftkonstante k mit F = k · ∆z. Ein typischer Verlauf ist in Abb. 14 gezeigt. Nähert sich die Probe der Spitze, so nehmen attraktiven Kräfte zu, und der Cantilever biegt sich geringfügig durch. Geschieht diese Zunahme bei kleineren Abständen schneller als durch die rücktreibende Kraft des Cantilevers kompensiert werden kann (dF/dz > k), kommt es zu einem Einschnappen der Spitze auf die Oberfläche (snap-in). Von da an bewegt sich die Spitze im Kontakt mit der Probe mit, und der Cantilever biegt sich nach oben durch. Beim Zurückziehen folgt die Spitze der Probenbewegung, bis die Ruhelage des Cantilevers (∆z = 0) erreicht ist. Nun übt der Cantilever keine Kraft mehr auf die Spitze aus, die aber noch durch die Adhäsionskräfte auf der Oberfläche gehalten wird. Erst wenn der Cantilever soweit nach unten gebogen wird, dass die rücktreibende Kraft des Cantilevers die Adhäsionskräfte übertrifft (k · ∆z > Fadh ), schnappt die Spitze wieder von der Probe weg, und der Cantilever befindet sich wieder im entspannten Zustand. 18 Abbildung 15: Abbildung der Topographie im dynamischen Modus. Der Cantilever wird zu erzwungengen Schwingungen angeregt, deren Amplitude als Regelsignal für den Abstand verwendet wird. 4.3 Dynamischer Modus Beim dynamischen Modus (andere Bezeichnungen: intermittent contact oder tapping mode) wird der Cantilever zu einer erzwungenen Schwingung nahe seiner Resonanzfrequenz angeregt. Dies geschieht durcht ein Piezoelement, das unter der Cantileverhalterung montiert ist. Typischerweise erreicht man Amplituden von einigen 10 nm. Die Anregung wird während der gesamten Abbildung konstant gehalten. Messgrößen sind hier die Schwingungsamplitude und die Phase in bezug zur Anregung. Beide werden mit Hilfe eines integrierten Lock-In-Verstärkers (s. Abschn. 3.6) bestimmt. Abbildung 15 zeigt den Signalverlauf. Nähert man sich der Probe, so nimmt die Amplitude zunächst über eine Distanz von einigen µm auf Grund langreichweitiger Wechselwirkungen langsam ab. Kommt die Spitze beim unteren Umkehrpunkt in leichten Kontakt mit der Probe, so fällt die Amplitude plötzlich auf einen geringeren Wert. Diese Reduktion der Amplitude kann man als Regelsignal für den Abstand verwenden, in dem man einen Sollwert der Amplitude vorgibt, z.B. 85% der Amplitude der freien Schwingung. Ist der Abstand zu gering, fällt die Amplitude weiter, und der z-Piezo muss den Abstand zur Probe vergrößern. Bei zu großem Abstand steigt die Amplitude, und der Regelkreis muss den Abstand verringern. Bei dieser Methode schlägt die Spitze bei jeder Schwingung auf der Probe auf. Man kann sich also vorstellen, dass auch die elastischen Eigenschaften (Abprallen der Spitze) die Abbildung beeinflussen können. So kann man über die Messung der Phase häufig noch einen zusätzlichen Kontrast beobachten, wenn man verschiedene Materialien abbildet oder die Spitze an Kanten abgelenkt wird. Dadurch, dass die Schwingung sich an jedem Pixel des Bildes stabilisieren muss (Zeitkonstante Q/f0 , s. Abschn. 3.4) und die Schwingung mit Hilfe eines Lock-In ausgewertet wird (weitere Zeitkonstante T ), ist der dynamische Modus langsamer als der Kontaktmodus.8 In den Bildern erkennt man normalerweise deutlich mehr Einzelheiten, da die Kontaktfläche kleiner ist und der Effekt des Wegschiebens (s.o.) entfällt. 8 Bei einer Güte von 250 und einer Frequenz von 70 kHz ergibt sich bei 512x512 Bildpunkten eine Aufnahmedauer von mindestens 15 min. 19 Abbildung 16: Abstandsabhängige Amplitude. Im linken Teil (z < 1,4 nm) trifft die Spitze auf die Probe, und die Amplitude nimmt linear mit dem Abstand ab. Für größere Abstände ergibt sich eine Kombination aus Luftdämpfung und Verschiebung der Resonanzkurve (attraktive Wechselwirkung), die zu der langsamen Amplitudenänderung führt. 4.4 Amplituden-Abstands-Kurve Den direkten Nachweis, dass die Spitze die Probe im Tapping-Modus berührt, erhält man aus einer Aufnahme der Oszillationsamplitude in Abhängigkeit von der z-Position der Probe (Abb. 16). Bei abnehmendem Abstand reduziert sich die Amplitude zunächst langsam durch eine zunehmende Luftdämpfung in der Nähe der Probe und durch eine Verschiebung der Resonanzfrequenz zu kleinen Werten aufgrund der attraktiven langreichweitigen van-der-Waals-Wechselwirkung. Kommt die Spitze erstmalig in Kontakt mit der Probe, reduziert sich die Amplitude näherungsweise um denselben Betrag wie sich der Abstand verringert. Daraus kann selbst bei unbekannter Kalibrierung der y -Achse (Skala in mV des Lock-In-Ausgangs) die absolute Amplitude bestimmt werden, wenn die Kalibrierung des z-Piezos bekannt ist. 4.5 Amplituden-Spannungs-Kurve Um den Effekt einer eventuellen elektrostatischen Wechselwirkung (Abschnitt 2.7) zu untersuchen, kann an einem festgehaltenen Ort die Spannung U geändert werden. Dabei wird die Amplitude und Phase aufgezeichnet. Eine attraktive Kraft durch die angelegte Spannung wird die Spitze zusätzlich auf die Probe ziehen und dabei die Amplitude weiter reduzieren. Gleichzeitig wird sich die Phase aufgrund der veränderten attraktiven Wechselwirkung ändern. Eine typische Kurve ist in Abb. 17 gezeigt. Nach Gleichung 10 ist diese zusätzliche anziehende Kraft proportional zu (U − ∆Φ/e)2 , verschwindet also bei U = ∆Φ/e. Diese Spannung sollte eingestellt werden, um bei der Magnetkraftmikroskopie die konkurrierende elektrostatische Wechselwirkung zu eliminieren. 4.6 Fly-Modus Der Fly-Modus (andere Bezeichung: lift mode) dient dazu, langreichweitige Kräfte zu messen. In den bisher dargestellten Fällen werden die Messgrößen immer von kurzreichweitigen Kräften dominiert, die eng mit der Topographie zusammenhängen. Um aber elektrostatische oder magnetische Kräfte zu messen, muss dieser Einfluss eliminiert werden. Man kann das tun, indem man die Spitze um einige 10 nm zurückzieht und die Schwingung im Feld der langreichweitigen Kräfte aufzeichnet. Die Amplitude wird sich dabei kaum ändern, da man immer noch nahe der Resonanzfrequenz misst, jedoch ist die Änderung der Phase proportional zum Gradienten der Kraft (s. Abschn. 3.4). Da auch die Van-der-Waals-Wechselwirkung (die mit der Topographie korreliert ist) langreichweitige Anteile besitzt, ist es wichtig, die Messung immer in derselben Höhe über der Probe durchzuführen. 20 Abbildung 17: Spannungsabhängige Amplitude (links) und Phase (rechts) einer chrombeschichteten Spitze. Der Parabelfit (durchgezogene Kurve) ergibt eine Differenz der Austrittsarbeiten von 450 mV. Der Trick ist folgender: Man bildet zunächst die Probe im dynamischen Modus ab und merkt sich die Topographie. Danach fährt man dasselbe Profil in einer größeren Höhe nochmals nach und misst dabei das langreichweitige Signal. Um Abstandsfehler gering zu halten, wird dieses Verfahren zeilenweise angewendet. Die wichtigste Anwendung dieser Methode ist die Magnetkraftmikroskopie. 5 Das Anfatec Level AFM In diesem Versuch wird ein Rasterkraftmikroskop der Firma Anfatec mit Steuerelektronik und Computer verwendet. Die Details des Aufbaus und der Handhabung werden am Versuchstag besprochen. Hier soll nur eine grobe Übersicht gegeben werden. 5.1 Aufbau Abbildung 18 zeigt ein Foto des AFM. Die Grundfläche ist eine massive Steinplatte, auf deren Unterseite eine Gummimatte aufgeklebt ist. Auf der Steinplatte stehen drei Stäbe mit Gewindestangen, an denen der Mikroskopkörper mit Hilfe von Viton-Bändern aufgehängt ist. Dieser Aufbau sorgt für die Isolation von Schwingungen aus dem Boden (Trittschall). Im Mikroskopkörper (Abb. 18) befinden sich die Schrittmotoren für die Grobannäherung. Sie betreiben drei Gewindestangen (fine screws), auf denen der Messkopf ruht. Mit ihnen kann der Messkopf und damit der Cantilever in Schritten von ca. 1 µm an die Probe angenähert werden. Die Probe sitzt in der Mitte auf einem magnetischen Halter und wird während der Abbildung von den Rasterpiezos bewegt. Zusätzlich gibt es noch seitliche Inbusschrauben, mit denen die Probe lateral grob vorpositioniert werden kann. Der Messkopf enthält den Cantilever mit der Auslenkungsdetektion nach dem Lichtzeigerprinzip. Abbildung 19 zeigt den Strahlengang. Ein Laserstrahl verlässt die Laserdiode und wird über eine Linse und einen Spiegel auf den Cantilever gelenkt. Der von dort reflektierte Strahl trifft auf einen zweiten Spiegel und wird von diesem auf das Photodiodenfeld geleitet, das aus vier einzelnen Dioden besteht. Die Intensität auf den Dioden gibt Auskunft über die Durchbiegung (Ioben − Iunten ) und Torsion (Ilinks − Irechts ) des Cantilevers. Der Strahlengang muss nach jedem Cantileverwechsel neu justiert werden, damit der Strahl in Ruhelage auf die Mitte des Diodenfeldes trifft. Dies erfolgt mit vier Stellschrauben, die die Linse, Spiegel und Photodioden bewegen können. Der Cantilever wird mit einer Feder in seine Halterung geklemmt. Seine Position kann von oben mit einer Kamera beobachtet werden. In der Halterung ist auch der Piezoaktuator für die Anregung der Cantileverschwingung integriert. Die Positionierung des Messkopfes auf den Mikrometerschrauben des Mikroskopkörpers ist selbstzentrierend. 21 Abbildung 18: Links: Aufnahme des Anfatec Level AFM. Der Mikroskopkörper hängt an Vitonbändern zur Schwingungsisolation. Der Cantilever und die Auslenkungsdetektion (Laser, Photodioden) befinden sich im Mikroskopkopf (AFM Head), der zur Messung auf den Mikrometerschrauben aufliegt. Rechts: Mikroskopkörper des Anfatec AFM (Ansicht von oben). Er enthält die Schrittmotoren für die Grobannäherung und den Probenhalter mit den Rasterpiezos. Die Signale für die Rasterung, die Messung der Cantileverauslenkung und die Oszillation werden von einer Steuerelektronik verwaltet, die die Schnittstelle zum PC und zur Datenaufnahmesoftware darstellt. Alle Bilder und Messwerte werden über diese Software aufgenommen. Ebenso erfolgt die komplette Steuerung des Mikroskops per Software, ausgenommen die laterale Grobpositionierung. Nach dem Aufsetzen des Messkopfes sollte daher der Mikroskoptisch nicht mehr berührt werden. 5.2 Software Die Durchführung der Teilversuche und die Bedienung der Software wird vor Ort erklärt. Außerdem steht während des Versuches eine umfangreiche Dokumentation zum AFM zur Verfügung. Für eine bessere Übersicht sollen hier dennoch einige wesentliche Bestandteile der Software vorgestellt werden. Beim Starten der Software muss die Elektronik eingeschaltet sein, damit die Startparameter Abbildung 19: Links: Messkopf des AFM. Der von einer Laserdiode erzeugte Laserstahl trifft über einen Ablenkspiegel auf den Cantilever und wird über einen zweiten Spiegel auf das Photodiodenfeld gelenkt. Von oben kann der Cantilever mit einer Kamera beobachtet werden. Für die Justage des Strahlengangs stehen diverse Schrauben zur Verfügung (bezeichnet mit Laser x,y und Detektor x,y). 22 eingestellt werden können. Nach dem Einsetzen des Cantilevers und Vorjustierung des Strahlengangs erfolgt die Kontrolle der Feinjustage mit Hilfe der Software. 5.2.1 Crosshairs Dieses Fenster hat die Gestalt eines Fadenkreuzes und zeigt die Position des Laserstrahls auf dem Photodiodenfeld. Mit Hilfe der Justierschrauben auf dem Messkopf muss der Strahl so eingestellt werden, dass er bei höchster Verstärkung (Gain 100) etwa in die Mitte des Fadenkreuzes trifft. Hier kann auch die Intensität des reflektierten Strahls abgelesen werden. Daneben sind noch die Werte für die Auslenkungen x und y getrennt angegeben. Diese Werte werden in der Software als T-B (top minus bottom) bzw. als L-R (left minus right) bezeichnet. 5.2.2 Scan Parameter Hier werden die Einstellungen des Rasterbereiches (Größe, Position, Geschwindigkeit, Bildpunkte) und des Regelkreises vorgenommen. Dazu gehören: • Ref.: Bezeichnet den Sollwert S für den Regelkreis. Je nach Betriebsart ist die Bedeutung unterschiedlich. Im Kontaktmodus wird hier eine Auslenkung (T-B) eingestellt, im dynamischen Modus eine Amlitude (als Prozentwert des Wertes der freien Schwingung, s. DNC Window). • Ki und Kp : Paramter des Regelkreises. Aus dem Auslenkungssignal I und dem Sollwert S wird der neue z-Wert der Abstandsregelung wie folgt berechnet: ∆neu = I − S (29) zneu = zalt + Ki · ∆neu + Kp · (∆neu − ∆alt ) (30) ∆alt = ∆neu (31) Entgegen der intuitiven Vermutung ist also Ki eher mit dem Proportionalanteil und Kp mit dem Differentialanteil eines PID-Regelkreises (Abschn. 3.5) gleichzusetzen. Ein gewisser integraler Anteil kommt durch die diskreten Zeitabstände der einzelnen Regelungsschritte zustande. Für den Versuch soll als Standardeinstellung Kp = 3 · Ki verwendet werden. • Bias: Spannung zwischen Spitze und Probe. • Alternative Einstellungen für die automatische Annäherung: Durch linken Mausklick auf Ki , Kp und Bias können Werte eingestellt werden, die nur während der automatischen Annäherung aktiv sind. Beim Abbilden sind die zuerst eingestellten Parameter wieder aktiv. • Annäherung, Zurückziehen: Im unteren Teil des Menüs befindet sich die Kontrolle der Spitze. Ein Rechtsklick auf die Pfeile öffnet ein Menü, in dem die Strecke eingestellt werden kann. Auch die automatische Annäherung wird hie gestartet. 5.2.3 Automatische Annäherung Nach dem die Spitze grob per Auge an die Probe angenähert wurde, muss die weitere Annäherung automatisch erfolgen. Dazu aktiviert man im Menü Scan Parameter den Pfeil Richtung Probe. Ist der Sollwert der Auslenkung nicht erreicht, wird der z-Piezo vom Regelkreis gedehnt, und die Probe bewegt sich in Richtung Spitze. Kommt kein Kontakt zustande, zieht sich der Piezo wieder zurück, und es werden einige Schritte (ca. 1 µm, auf jeden Fall weniger als der Hub des z-Piezos) mit dem Grobantrieb gefahren. Dann wird der Regelkreis wieder aktiviert, und der Piezo dehnt sich wieder aus. Die Sequenz stoppt automatisch, wenn der Sollwert erreicht wurde. 23 5.2.4 Spectroscopy Im Spektroskopie-Fenster können verschiedene Messkurven über einem Ort auf der Probe aufgenommen werden. Abhängig vom Messmodus können das sein: Auslenkung, Amplitude, Phase oder Lock-In-Signal in Abhängigkeit vom Abstand oder von der Spannung (Bias). Daneben können Start-/Endpunkte sowie Geschwindigkeit der Rampen eingegeben werden. 5.2.5 DNC Das DNC-Fenster (für dynamic non-contact mode) erlaubt die Einstellung der Cantilever-Anregung und Messung einer Resonanzkurve. Gute Werte für die Anregung liegen zwischen 0.1 und 1 V. Die Wahl der Frequenz und des Amplituden-Sollwertes erfolgt durch Klicken in die grafische Darstellung der Resonanzkurve. 5.2.6 Weitere Optionen Daneben gibt es noch weitere Kontrollmöglichkeiten: • Coarse Move: Mit diesem Menü können die Schrittmotoren getrennt oder gemeinsam gesteuert werden. • Oscilloscope: Darstellung aller zugänglichen Signale • Feedback: Legt fest, welches Signal der Regelkreis zur Abstandskontrolle verwenden soll; im statischen Modus die Auslenkung T-B und im dynamischen der Betrag der Amplitude (R). • Acquire: Hier kann gewählt werden, welche Kanäle als Bild aufgenommen werden sollen (z.B. Cantilever-Auslenkung, Topographie, Amplitude, Phase, Lock-In-Signal). 6 Durchführung und Aufgaben 6.1 Kontaktmodus Ziel dieses Versuchsteils ist vor allem das Kennenlernen des Mikroskops und der Software. Dazu wird eine Probe mit bekannten Eigenschaften abgebildet. Es handelt sich um ein Testgitter, also ein streifenartiges Höhenprofil mit festgelegter Periode und Stufenhöhe. Diese Probe eignet sich gut zur Untersuchung von Abbildungsfehlern wie etwa Hysterese und Creep der Piezos. • Einbau eines Kontakt-Cantilevers (CSC17) • Justage des Strahlengangs • Abbildung eines Testgitters (Topographie, T-B, L-R) mit verschiedenen Regelparametern • Überprüfung der Kalibrierung 6.2 Kraft-Distanz-Kurven Mit Hilfe der Kraft-Distanz-Kurven kann die Kraft abgeschätzt werden, mit der die Spitze auf die Probe gezogen wird. Die Differenz der Positionen, bei der die Spitze die Probe berührt und bei der sie sie wieder verlässt, kann über die Federkonstante des Cantilevers in eine Kraft umgerechnet werden. • Aufnahme von Kraft-Distanz-Kurven 24 • Bestimmung der Resonanzfrequenz und Abschätzung der Federkonstanten (Abschnitt 3.2) • Bestimmung der Adhäsions- und der Andruckkraft aus Kurvenverlauf und Federkonstante 6.3 Dynamischer Modus Mit dem dynamischen Modus können sowohl die Rauhigkeit als auch eventuelle Kontaminationen einer Oberfläche beurteilt werden. Durch die Oszillation der Spitze ist die Neigung, Adsorbate während der Abbildung zur Seite zu schieben, deutlich geringer. Vor einer Abbildung muss zunächst die richtige Anregungsfrequenz bestimmt werden. Eine am Versuchstag zur Verfügung gestellte Probe soll dann im Hinblick auf ihre Rauhigkeit und Oberflächenstruktur untersucht werden. • Einbau eines Cantilevers für dynamischen Modus (NSC15), Justage • Bestimmung der Resonanzfrequenz des Cantilevers • Aufnahme von Amplituden-Abstands-Kurven A(z) • Bestimmung der Oszillationsamplitude • Abbildung der Probe im dynamischen Modus (Topographie, Amplitude, Phase) • Charakterisierung der Oberfläche (Rauhigkeit, Perioden, Größenordnungen, Vorzugsrichtungen, Kontaminationen...) 6.4 Magnetkraftmikroskopie Untersucht werden soll eine Festplatte mit Out-of-plane-Anisotropie, also Domänen, deren Magnetisierung senkrecht auf der Probenoberfläche steht. • Einbau eines magnetisch beschichteten Cantilevers (NSC18, CoCr) • Bestimmung der Kontaktpotentialdifferenz • Aufnahme der Domänenstruktur im Fly-Modus • Bestimmung der mittleren Domänengröße und der Speicherdichte in GBit/(Zoll)2 6.5 Auswertung und Protokoll Ein Vorschlag zur Gliederung des Protokolls: • Ziel der Messung (max. 1 Seite) • Funktionsprinzip und Versuchsaufbau (kurz) • Aufgabenstellung und Versuchsdurchführung • Datenauswertung und -Analyse (quantitativ) • Diskussion der Ergebnisse • Zusammenfassung Das Protokoll soll nicht enthalten: • wiederholende Erläuterungen aus dem Text der Versuchsanleitung 25 • überflüssige Beschreibungen des Versuchsablaufs bzw. Angaben zu Versuchsbedingungen, die zum Messergebnis nichts Wesentliches beitragen Zu den geforderten Messungen und Auswertungen müssen die Bilder bzw. Messdaten präsentiert und die Schritte zur Auswertung und Interpretation dargelegt werden. Zu jedem Bild gehören die Aufnahmeparameter (Scanbereich, Messmodus, Aufnahmekanal) und andere wesentliche Informationen, je nach Methode. Jedes Ergebnis muss mit einer Fehlerbetrachtung versehen werden. 7 Fragen zur Selbstkontrolle • Welche Kräfte zwischen zwei Festkörpern gibt es? • Wie funktioniert ein Rasterkraftmikroskop prinzipiell? • Welche Messmodi gibt es? • Welche Kräfte bestimmen die Abbildung bei den verschiedenen Messmodi? • Wie wirkt sich im Modell des harmonischen Oszillators eine zusätzliche ortsabhängige Kraft aus? • Wie funktioniert ein Lock-In-Verstärker? • Wie sieht im statischen Modus die Auslenkung des Cantilevers als Funktion des Abstands aus (Hin- und Rückweg)? • Wie bestimmt man aus einer Amplituden-Abstands-Kurve die Oszillationsamplitude? • Warum sind in der Magnetkraftmikroskopie Proben mit einer Magnetisierung parallel zur Oberfläche schwerer abzubilden als Proben mit senkrechter Magnetisierung? Literatur [1] G. Binnig und H. Rohrer, Helv. Phys. Acta 55, 726 (1982). [2] G. Binnig, C. F. Quate, und C. Gerber, Phys. Rev. Lett. 56, 930 (1986). [3] R. Wiesendanger, Scanning probe microscopy and spectroscopy (Cambridge University Press, Cambridge, 1994). [4] F. J. Giessibl, Phys. Rev. B 56, 16010 (1997). [5] H.-J. Butt, B. Cappella, und M. Kappl, Surf. Sci. Rep. 59, 1 (2005). [6] G. Huber et al., P. Natl. Acad. Sci. USA 102, 16293 (2005). [7] H. Hertz, J. Reine Angew. Math. 92, 156 (1881). [8] R. W. Carpick, N. Agraït, D. F. Ogletree, und M. Salmeron, J. Vac. Sci. Technol. B 14, 1289 (1996). [9] C. Sommerhalter, Kelvinsondenkraftmikroskopie im Ultrahochvakuum zur Charakterisierung von Halbleiter-Heterodioden auf der Basis von Chalkopyriten, PhD thesis, Freie Universität Berlin, 1999. [10] C. J. Chen, Introduction to scanning tunnelling microscopy (Oxford University Press, New York, 1993). 26