Phase 1
Werbung

ADS Vorlesung SS06
Prof. Dr. W. Conen,
April/Mai, FH Gelsenkirchen
-Minimal
spannende Bäume mit dem
Boruvka-Algorithmus
V1.0b
Es fehlt noch der vermutlich älteste Algo für minimale
Spannbäume:
Laut Tarjan von Boruvka, 1926!
Idee wie folgt:
In jeder Runde werden Teilbäume (eines MST) mit ihren
nächsten Nachbarn verschmolzen (wir nennen die Teilbäume im
folgenden Komponenten)
Die Kanten, die zu Verschmelzungen führen, werden in den
MST aufgenommen
Durch die Verschmelzungen werden viele Kanten irrelevant
Das sind die Kanten, die Knoten innerhalb einer bereits
verbundenen Komponente verbinden (also in der
Komponente zu Kreisen führen würden)
Zu Beginn steht jeder Knoten für eine Komponente, die nur ihn
enthält
V1.0b
Boruvkas Algorithmus
Annahme: wir haben n Knoten, m Kanten, indiziert von [0..n-1], der
(ungerichtete) Graph G = (V,E) ist zusammenhängend, Ausgabe: MST
Hier der Ablauf des noch folgenden Algorithmus
Solange es noch mehr als eine Komponente gibt (Runde/Iteration)
Setze für jede Komponente i die kürzeste in dieser Runde bisher
gefundene Kante aus i heraus auf null mit einer Länge unendlich
Laufe über alle Kanten xy, die noch in E sind (Phase 1)
Finde die Repräsentanten der Komponenten, in denen x und y sich
befinden, i für x, j für y.
Entferne xy aus E, falls i = j, also x und y in einer Komponente sind
Sonst prüfe, ob xy eine neue kürzeste Kante aus i bzw. j heraus ist,
und, falls ja, dann vermerke dies
Laufe über alle Komponenten i (Phase 2)
Sei xy die kürzeste Kante, die aus i herausführt mit eine Länge D[i]
Wenn x und y nicht mittlerweile in der gleichen Komponente liegen,
dann nimm xy in den MST auf und vereine die Komponenten
Entferne xy aus E
V1.0b
Boruvka
3
b
4
d
3
1
a
4
c
3
b
1
4
1 2
e
d
3
1
a
4
c
3
b
1
4
1 2
e
d
3
1
a
4
2
f
3
2
f
3
2
f
2
c
1
e
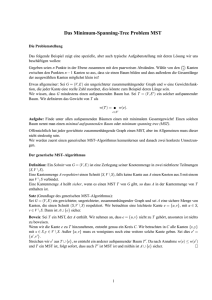
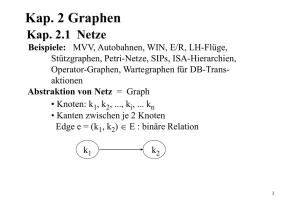
Der Ausgangsgraph, es werden alle Kanten
nach und nach betrachtet. Der „naive“
Algorithmus schreibt keine Reihenfolge vor.
3
Runde 1, Ergebnis Phase 1:
Jeder Knoten steht noch für seine
eigene Komponente. Die roten Kanten sind
die gefundenen minimalen Kanten (die Wahl,
z.B. für c ist nicht eindeutig), die aus den
Komponenten hinausführen.
Runde 1, Ergebnis Phase 2:
Nach Betrachtung von b und c wird Kante
eb überflüssig. Die grünen Kanten werden
in den MST übernommen und aus E entfernt.
In E sind noch die schwarzen Kanten.
Es gibt jetzt nur noch ZWEI Komponenten.
V1.0b
Boruvka
3
b
4
d
3
1
a
b
1
4
e
d
3
a
f
2
c
3
2
3
2
2
1
c
1
e
f
3
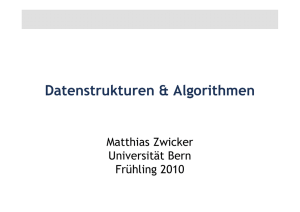
Runde 2, Ergebnis der Phase 1:
Jetzt ist das Ergebnis übrigens eindeutig.
Denken Sie daran: im Prinzip wird jede
schwarze Kante „angepackt“, die Kante
ac wird entfernt, weil sie Knoten aus der
gleichen Komponente verbindet
Runde 2, Ergebnis der Phase 2:
In E sind noch die schwarzen Kanten
enthalten.
Wir haben n-1 Kanten aufgenommen (die
grünen), der MST ist komplett, es gibt nur
noch eine Komponente.
V1.0b
Boruvkas Algorithmus: Implementierung
Um die zusammenwachsenden Komponenten zu verwalten, verwenden wir UnionFind auf Arraybasis.
Die Daten werden in einem Array P mit n Einträgen abgelegt, nummeriert von
0..n-1.
Zu einem gegebenen Knoten x findet Find(P,x) den Repräsentanten der
Komponente, in der x liegt, ebenso verwenden wir wieder Union und Init.
In jeder „Solange“-Runde verwenden wir zwei Arrays, um die Informationen zu den
kürzesten Kanten, die aus den Komponenten hinausführen, abzulegen:
D[i] gibt die Länge der bisher gefundenen kürzesten Kante min_edge[i] an; zu
Beginn jeder Runde werden alle auf 1 bzw. null initialisiert
In der Phase 1 der „Solange“-Runde werden alle Kanten, die noch in E verblieben
sind, angeschaut:
Falls die Kante innerhalb einer bereits gefundenen Komponente liegt, wird sie aus
E entfernt
Sonst wird geschaut, ob sie vielleicht kürzer ist, als die bisher gefundenen
„kürzesten“ Kanten, die aus den beiden beteiligten Komponenten hinausführen –
wenn ja, dann werden die Informationen in D und min_edge upgedated, und
zwar für den Knoten, der die jeweilge Komponente repräsentiert, in der der
jeweilie Endpunkt der betrachteten Kante liegt (wenn nein, dann geschieht
nichts)
In der Phase 2 der „Solange“-Runde laufen wir über alle Knoten. Wenn diese
Komponenten repräsentieren (also P[i] = i ist), dann nehmen wir die min_edge zu
dieser Komponente in den MST auf und vereinen die beiden Komponenten, falls die
beiden Knoten, die sie verbindet, nicht bereits (durch andere in dieser Phase
aufgenommene Kanten) in einer Komponente liegen.
Zuletzt entfernen wir noch die Kante aus E
V1.0b
Boruvkas Algorithmus
Boruvka(G):
int P[n], Init(P), MST Ã {}, int D[n], Edge min_edge[n];
while Anzahl(P) > 1 do
. D[i] Ã 1, min_edge[i] Ã null, jeweils für alle i
. for each xy 2 E do
.
i à Find(P,x), j à Find(P,y)
.
if (i = j) then E Ã E - {ij}
.
else if w(ij) < D[i] then D[i] Ã w(ij), min_edge[i] Ã xy
.
if w(ij) < D[j] then D[j] Ã w(ij), min_edge[j] Ã xy
. for each i in [0..n-1] do
.
if P[i] = i then xy à min_edge[i]
.
if Find(P,x) != Find(P,y) then
.
MST Ã MST [ {xy}, Union(P,Find(x),Find(y))
E Ã E – {xy}
V1.0b
Boruvkas Algorithmus
Kosten:
Die Union-Find-Operation sind annähernd linear
Die Anzahl von Komponenten (also bisher unverbundenen
Teilen des MST) verringert sich in jeder Runde mind. um den
Faktor 2
Eine nennenswerte Zahl von Kanten wird in jeder Runde
entfernt
Eine nicht sehr präzise, „konservative“ Abschätzung (ohne
Einsparungen durch Kantenentfernungen):
O(|E| log |V| log* |E|) = O (m log n log* m)
Anzahl der Runden höchsten log |V|, pro Runde höchstens
m Find, mit Kosten weniger als m log* m.
mit Modifikationen O(m log n) erreichbar,
In empirischen Tests (s. Sedgewick) Kruskal für spärlich
besetzte Graphen und Prim-Varianten für stärker bis stark
gefüllte Graphen unterlegen
V1.0b
Boruvkas Algorithmus
Trotzdem ist der Algorithmus interessant, z.B. für Parallelisierungen – aber
auch für Randomisierung („Verzufallisierung“)
Dort werden Kanten entfernt, die sicher nicht im MST sein können...
Zunächst 3 modifizierte Boruvka-Iterationen:
Die Knoten der Teil-MST werden je Teil-MST zu einem einzigen
Superknoten verschmolzen
die Kanten werden entsprechend umnummeriert, bei parallelen wird
nur die kürzeste vermerkt, Schleifen werden entfernt („Kontraktion“)
Das kann man übrigens auch in den normalen Boruvka einbauen und
damit Aufwand vermeiden (effektivere Reduktion der Kantenzahl)
Weitere Kanten werden zufällig gewählt und geprüft, dies geschieht
eingebettet in einen bestimmten Ablauf, den wir nicht im Detail anschauen
werden, der aber zu zu erwartenden Kosten von O(m+n) führt – also
linear!
Wir schauen uns das heute immer wichtiger werdende Instrument der
Randomisierung von Algorithmen voraussichtlich noch an einem anderen
Beispiel genauer an (ein nettes Beispiel ist ein randomisierter Algo von
Uwe Schöning zur Erfüllbarkeitsprüfung von aussagenlogischen Formeln)
V1.0b