4.1
Werbung

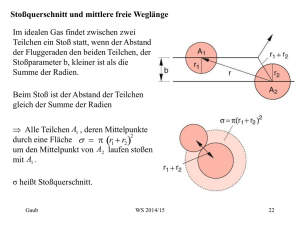
§4 Systeme von Massenpunkten Vielteilchensysteme (VTS) Erinnerung: Inertialsysteme Galileitransformation Physikalische Gesetze gleich ! 3 m rS z Def.: Massenschwerpunkt m r m i rS i i i m r2 1 mi ri M i S rS 2 m r1 r1 2 m i Gesamtmasse m r2 Schwerpunktgeschwindigkeit y x drS 1 1 dri 1 vS mi v i mi pi dt M M i dt M Gesamtimpuls Gaub P pi M vS i WS 2014/15 1 Abgeschlossenes System Fik Fki Nur interne WW mit Actio = Reactio Fik 0 i k P pi const Mit äußerer Kraft F0 mit as dvs dt F dvs d dP M p i dt dt dt F M as Der Schwerpunkt eines beliebigen Systems von Massenpunkten bewegt sich wie ein Körper mit Masse M. Die gesamte äußere Kraft wirkt auf S. Beschreibung im Schwerpunktsystem vorteilhaft Gaub WS 2014/15 2 Schwerpunkt-System ri Ortskoordinaten im Laborsystem rS Ortskoordinaten von S im Laborsystem riS Ortskoordinaten von MPi im S - System ri rS riS m r m (r r ) m r m r m r M r M r M r i iS i i i S i i m r i iS S 0 i i S S S Bsp.:Balkenwage vi viS vS mi viS piS 0 Spkt-System ist immer Null d ito Gaub Die Summe aller Impulse im WS 2014/15 3 Bsp: 2 Massen 1 1 2 2 EKin m1 v1 m2 v2 2 2 1 1 2 2 2 (m1 v1S m2 v2S ) (m1 m2 ) vS vS (m1 v1S m2 v2S ) 2 2 p1S p2 S 0 EKin 1 2 E Kin (S) M vS 2 EKin im S-System EKin der Gesamtmasse vereinigt in S Dito für n > 2 Gaub WS 2014/15 4 Reduzierte Masse Bsp.:Doppelstern m1 Abgeschlossenes System: dv1 F12 dv 2 F21 ; dt m1 dt m2 m it m1m2 m1 m 2 Reduzierte Masse F12 F12 F21 m2 S v12 1 1 d v1 v 2 F dt m1 m2 v12 v1 v2 Relativ-Geschw. 1 1 2 s 2 2 E kin m1v1S m2v2S v12 2 2 dv12 F12 dt v is vi vS Die Relativbewegung zweier isolierter Teilchen kann auf die Bewegung eines Teilchens mit der reduzierten Masse unter dem Einfluss der Kraft F12 reduziert werden! Gaub WS 2014/15 5 Drehimpuls eines Teilchensystems D1 r1 (F1 F12 ) Drehmomente bezüglich 0: D2 r2 (F2 F21 ) Gesamt-Drehmoment des Systems: D r1 F1 r1 F12 r2 F2 r2 F21 F12 F21 D r1 F 1 r2 F 2 r1 r2 F12 z F1 m1 F12 r1 D2 Dges x r2 D1 F21 F2 m2 0 Gesamtdrehimpuls bezüglich 0: L r1 p1 r2 p2 y dL r1 F 1 r 2 F 2 D dt Die zeitliche Änderung des gesamten Drehimpulses eines Systems von Teilchen, bezogen auf einen beliebigen Punkt, ist gleich dem gesamten Kräfte bezogen auf den selben Punkt. Drehmoment aller äußeren Der gesamte Drehimpuls eines abgeschlossenen Systems von Teilchen ist konstant Gaub WS 2014/15 6 Drehimpuls Vielteilchen-System: L ri pi mi ris rs vis vs i Allgemein: i Drehimpuls der Gesamtmasse in S bezüglich 0 Bsp.: 2 Teilchen: i Drehimpuls bezüglich S i m r rs mi vis L Lso L s Gaub L M r s v s mi r is v is mi r s v is mi r is v s i is 0 L s r1S p1S r2S p2S WS 2014/15 vs 0 r r p 1 2 1S r12 v12 7