Einsatz von dynamischen Geometriesystemen in der
Werbung

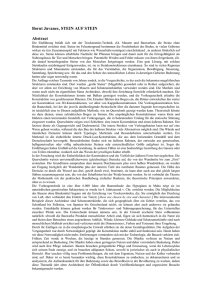
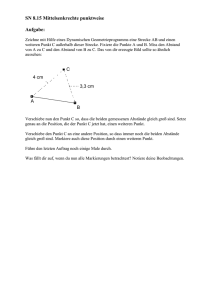
Klaus Aspetsberger Einsatz von dynamischen Geometriesystemen in der Geometrieausbildung Im Bereich der elementaren Geometrie wird das dynamische Geometriesystem GeoGebra für das Veranschaulichen von geometrischen Sätzen, das Aufspüren verschiedener Fälle beim Beweisen und das Überprüfen von Lösungsansätzen bei Konstruktionsaufgaben eingesetzt. Im Rahmen der konstruktiven Geometrie werden einfache Konstruktionsschritte zu neuen Werkzeugen zusammengefasst. Dabei wird der Zyklus über das Erstellen eines Werkzeugs, das Anwenden des Werkzeugs für spezielle Konstruktionen und die Beobachtung der Auswirkungen von allfälligen Änderungen der Konstruktion deutlich gemacht. Mit GeoGebra3D können spezielle Konstruktionen räumlicher Körper veranschaulicht werden. 1. Geometrieausbildung an der Pädagogischen Hochschule für Oberösterreich Im Curriculum der Ausbildung für angehende Lehrerinnen und Lehrer für Mathematik an Neuen Mittelschulen findet die Geometrie an mehreren Stellen Berücksichtigung. In einer einführenden Lehrveranstaltung zur elementaren Geometrie soll den Studierenden ein fundiertes Grundwissen für die Geometrie in der Sekundarstufe I vermittelt werden. Der Bogen spannt sich dabei von einer Einführung der Geometrie über Axiome, die Behandlung von Kongruenz- und Ähnlichkeitsabbildungen, die Herleitung wesentlicher Eigenschaften von Dreiecken und Vierecken bis hin zu Flächenverwandlungen und Inhaltsberechnungen. Eine zentrale Stellung nimmt dabei das Begründen ein. In einer weiteren Lehrveranstaltung wird auf analytische und konstruktive Methoden zur Darstellung von Körpern eingegangen. Ausgehend von Dreitafelkonstruktionen werden Schrägrisse, Normalrisse und Zentralrisse behandelt. In diesem Bereich verfügen die Studierenden über sehr unterschiedliche Vorkenntnisse. Dadurch können manche Konstruktionsarten nur exemplarisch behandelt werden. Ebenso 1 wird in den verschiedenen Schultypen der Sekundarstufe in Österreich die analytische Geometrie im Lehrplan sehr unterschiedlich berücksichtigt. Das zentrale Ziel dieser Lehrveranstaltung ist die Darstellung von einfachen Körpern und geometrischen Objekten. Begleitend zu diesen fachlich orientierten Veranstaltungen werden in Fachdidaktikseminaren und Laboren Unterrichtsmodelle und –sequenzen zu geometrischen Themen erarbeitet bzw. vorgestellt. In allen Lehrveranstaltungen zur Geometrie ist ein Computereinsatz in entsprechender Weise vorgesehen. 2. Veranschaulichen von Sätzen der ebenen Geometrie Die Eingabe von geometrischen Objekten ist bei dynamischen Geometriesystemen (DGS) nicht notwendigerweise an Koordinaten gebunden. So können Objekte (scheinbar) beliebig auf einem Zeichenblatt eingetragen und in der Folge auch verschoben werden. Dadurch eignen sich DGS sehr gut für das Veranschaulichen von Sätzen im Rahmen der elementaren Geometrie. Dabei können unterschiedliche Aspekte schrittweise untersucht werden. Wir demonstrieren dies an folgendem Beispiel: Satz von Thales: „Verbindet man zwei Endpunkte A und B eines Kreisdurchmessers mit einem weiteren Punkt C auf der Kreislinie, so entsteht ein rechter Winkel bei C.“ (KRAUTER 2005, S. 73) Dieser Satz kann durch eine sehr einfache Konstruktion mit GeoGebra veranschaulicht werden. Satz von Thales 2 Man konstruiert eine Strecke AB mit dem Halbierungspunkt M und einen Kreis k mit Mittelpunkt M, der durch Punkte A und B läuft. Auf dem Kreis k wird nun ein Punkt C gewählt. Dadurch ist seine Lage an den Kreis gebunden und kann nicht mehr frei in der Ebene platziert werden. Er kann aber mit dem Befehl Bewege (scheinbar) an jede beliebige Stelle des Kreises verschoben werden. Der Winkel α bei C bleibt dabei stets ein rechter Winkel (siehe Abbildung 1 ). Man kann mit derselben Konstruktion in GeoGebra auch den Kehrsatz zum Satz von Thales untersuchen. „Ist ACB ein rechter Winkel, so liegt C auf dem Kreis mit der Mitte M von AB als Mittelpunkt und |MA| als Radius.‘“ (SCHUPP 1977, S. 41) Mit dem Befehl Punkt anhängen/loslösen kann man den Punkt C vom Kreis k lösen und frei beweglich gestalten und die Größe des Winkels α je nach Lage des Punktes C untersuchen. Punkt außerhalb des Kreises Punkt innerhalb des Kreises Liegt C außerhalb des Kreises, ist der Winkel α kleiner als 90° (siehe Abbildung 2 ). Liegt er innerhalb, ist er größer als 90° (siehe Abbildung 3 ). In der Nähe des Kreises ist er annähernd gleich 90°. Entfernt man nun den Kreis k und versucht man C so zu wählen, dass der Winkel α ungefähr 90° beträgt, so liegen die passenden Orte von C annähernd auf einem Kreis. Die verschiedenen Orte des Punktes C lassen sich mit der Spur von C sehr gut dokumentieren (siehe Abbildung 4 ). 3 Spur des Punktes C C liegt exakt auf einem Kreis Man kann einen Punkt C auch so konstruieren, dass die Strecken AC und CB einen rechten Winkel einschließen. Dazu legt man eine Gerade durch A und errichtet darauf eine Senkreche durch B. C ist dann der Schnittpunkt dieser beiden Geraden. Betrachtet man nun die Spur von C, so liegen die Orte von C genau auf einem Kreis (siehe Abbildung 5 ). Das oben angegebene Beispiel ist sehr einfach und kann auch von Schülerinnen und Schülern durchgeführt werden. Beschreibungen über den didaktischen Einsatz findet man zahlreich in der Literatur (vgl. MEYER 2013, PÖCHTRAGER 2014, etc.). Im Rahmen der Lehrveranstaltungen sollen die Studierenden nicht nur selbst ein besseres Verständnis für die jeweiligen Sätze der elementaren Geometrie erlangen, sondern auch Möglichkeiten für den Einsatz von DGS im Unterricht kennenlernen. Sie sollen aber auch Erfahrungen darin sammeln, wie man auf unterschiedliche Weise an einen Sachverhalt herangehen kann. Ein wesentliches Ziel der Lehrveranstaltungen zur Geometrie liegt darin, die Studierenden zum Beweisen von geometrischen Theoremen hinzuführen. Für den Satz von Thales kann sehr einfach ein allgemeiner Beweis angegeben werden. Verbindet man den Punkt C in Abbildung 1 mit der Mitte von AB, so entstehen zwei gleichschenklige Dreiecke. Damit kann ein Beweis sogar für Schüler der Sekundarstufe I leicht geführt werden (vgl. PÖCHTRAGER 2014). Ganz anders ist es um die Umkehrung des Satzes von Thales bestellt. Typischer Weise wird dafür ein Widerspruchsbeweis angegeben (vgl. HOLLAND 2007, S. 127), der Studierenden oft Schwierigkeiten bereitet und für Schüler der Sekundarstufe I vermutlich zu schwer sein wird. 4 3. Auffinden verschiedener Fälle für Beweise Wie vorhin angesprochen, können viele Sätze der Geometrie mit Hilfe von GeoGebra sehr einfach veranschaulicht werden. Es ist dann aber mitunter auch schwierig, die Studierenden davon zu überzeugen, dass die Darstellung durch den Computer nur eine Veranschaulichung und noch kein Beweis ist. Dennoch können mit Hilfe von dynamischer Geometriesoftware verschiedene Fälle aufgespürt werden, die dann in einem allgemeinen Beweis getrennt untersucht werden müssen. Wir demonstrieren dies durch folgendes Beispiel: “Bei einer Doppelspiegelung an parallelen Achsen ist der Abstand zwischen einem Punkt P und seinem Bildpunkt P“ unabhängig von der Lage von P immer gleich groß.“ (vgl. SCHUPP 1977, S. 35) Doppelspiegelung an parallelen Achsen Wir spiegeln den Punkt P an der Geraden s und erzeugen einen neuen Punkt P‘. Anschließend spiegeln wir P‘ an der Geraden t und erhalten den Punkt P‘‘ (siehe Abbildung 6 ). Da der Abstand von P zu S gleich dem Abstand von S zu P‘ und der Abstand von P‘ zu T gleich dem Abstand von T zu P‘‘ ist, ist der Abstand von P zu P‘‘ gleich dem doppelten Abstand von S zu T. |PP‘‘| = |PS| + |SP‘| + |P‘T| + |TP‘‘| = 2 |SP‘| + 2 |P‘T| = 2 (|SP‘| + |P‘T|) = 2 |ST| Dies entspricht dem doppelten Abstand der parallelen Geraden s und t voneinander und ist von der konkreten Lage von P unabhängig. Wir haben bei diesem Beweis angenommen, dass der Punkt P‘ zwischen den Geraden s und t liegt. Ist dies immer der Fall? Mit GeoGebra können wir weitere Fälle ausfindig machen. 5 Doppelspiegelung an parallelen Achsen In Abbildung 7 wird der Punkt P an s soweit nach rechts gespiegelt, sodass P‘ sogar rechts von t zu liegen kommt. Spiegelt man P‘ anschließend an t, so kommt P‘‘ wieder links von t zu liegen. Doppelspiegelung an parallelen Achsen In Abbildung 8 liegt P zwischen s und t. P wird somit zuerst an s nach links auf P‘ und anschließend an t nach rechts auf P‘‘ gespiegelt. Auch für diese beiden Fälle ist der Abstand von P zu P‘‘ gleich dem doppelten Abstand von S zu T. Die Beweise für diese und weitere Fälle sind zwar ähnlich dem oben angegebenen, müssen aber den neuen Situationen angepasst werden. 4. Lösen von Konstruktionsaufgaben Bei Konstruktionsaufgaben sollen die Studierenden das erworbene Wissen zum Lösen von geometrischen Problemen heranziehen und anwenden können. Dabei treten verschiedene Phasen des Problemlöseprozesses (vgl. WEIGAND 2009, S. 71) sehr deutlich zu Tage. In einer heuristischen Phase müssen zunächst die Aufgabenstellung klar gemacht und Lösungsstrategien entwickelt werden. In einer algorithmischen Phase werden die einzelnen Konstruktionsschritte ausgeführt und dokumentiert. Schließlich wird in einer analytischen Phase die Richtigkeit der 6 Konstruktion begründet. Somit sollen von den Studierenden bei jeder Konstruktionsaufgabe die Konstruktion, eine Konstruktionsbeschreibung und eine Begründung für die Korrektheit der Konstruktion angeben werden. Dynamische Geometriesysteme können dabei hilfreich eingesetzt werden. Aufgabe: „Zwei Geraden schneiden sich außerhalb des Zeichenblattes. Konstruieren Sie dennoch die Winkelhalbierende ihres Schnittwinkels und begründen Sie die Konstruktion.“ (SCHUPP 1977, S. 53) Für diese Konstruktionsaufgabe gibt es verschiedene Lösungsmöglichkeiten. Schnitt von parallelen Schnitt von Winkel- Geraden halbierenden Ein Lösungsweg besteht darin, dass man zu den gegebenen Geraden g und h jeweils parallele Gerade g1 und h1 im gleichen Abstand einzeichnet. Ihr Schnittpunkt M liegt dann auf der gesuchten Winkelhalbierenden w. Wiederholt man dies für zwei weitere parallele Gerade g2 und h2 in einem anderen Abstand zu g und h, so liegt auch deren Schnittpunkt N auf w. Durch M und N kann die gesuchte Winkelhalbierende eindeutig konstruiert werden (siehe Abbildung 9 ). Man benutzt dabei den Umstand, dass die Winkelhalbierende genau jene Punkte enthält, die von den Schenkeln gleiche Normalabstände besitzen. Bei einem anderen Lösungsweg errichtet man zwei Strecken s1 und s2 durch jeweils zwei beliebige Punkte B1 und C1 bzw. B2 und C2 auf g und h. Konstruiert man nun für die entstehenden Winkel bei B1 und C1 bzw. B2 und C2 die Winkelhalbierenden, 7 so schneiden sich diese auf der gesuchten Winkelhalbierenden w (siehe Abbildung 10 ). Für die Begründung betrachtet man dabei die beiden Dreiecke AB1C1 bzw. AB2C2. Da sich die Winkelhalbierenden eines Dreiecks jeweils in einem Punkt schneiden, liegen beide Punkte Q und R auf der gesuchten Winkelhalbierenden w. Für Studierende besteht die Aufgabe darin, für diese Konstruktionsaufgabe selbstständig Lösungen zu finden und diese auch zu begründen. Ein zunächst unvollständiger Ansatz kann z.B. darin bestehen, dass Normale auf die Geraden g und h gelegt und deren Winkelhalbierende eingezeichnet (siehe Abbildung 11 ) werden. Liegen die Normalen z.B. bei einer Handkonstruktion zufälligerweise sehr günstig, so kann deren Winkelhalbierende auch tatsächlich durch A laufen und der Fehler in der Konstruktion bleibt unentdeckt. Normale auf g und h Mittelsenkrechte von B und C Mit Hilfe von dynamischen Geometriesystemen können jedoch fehlerhafte Ansätze rasch erkannt werden. Verschiebt man in unserem Fall z.B. eine der beiden Normalen, so sieht man sofort, dass die Winkelhalbierende der beiden Normalen ungleich w ist. Allerdings erkennt man auch, dass diese Winkelhalbierende parallel zu w liegt. Dies lässt sich über Normalwinkel begründen. GeoGebra zeichnet bei Geraden zwei Winkelhalbierende ein, die aufeinander normal stehen. Die zweite Halbierende schneidet g und h in B bzw. C (siehe Abbildung 12 ). Dadurch kann man eine Idee für die Lösung des Konstruktionsproblems erhalten. Die Mittelsenkrechte von BC läuft durch A und liegt parallel zu w. Somit ist sie auch gleich w. Dies kann man z.B. über kongruente Dreiecke und dem Parallelenaxiom begründen. 8 In der oben dargestellten Aufgabe erleichtert das dynamische Geometriesystem das Überprüfen eines Lösungsansatzes bzw. hilft in der heuristischen Phase auch bei der Ideenfindung. 5. Darstellung räumlicher Gegenstände Auch bei der Darstellung räumlicher Körper im Rahmen von geometrischem oder technischem Zeichnen können dynamische Geometriesysteme hilfreich eingesetzt werden. Einerseits bauen sie auf jenen Grundkonstruktionen auf, die auch bei Konstruktionen per Hand durchzuführen sind. Eine intuitive Handhabung über Icons mit den jeweiligen grafischen Darstellungen der Konstruktionsbefehle begünstigt zudem den Einstieg für Lernende. Ein weiterer Vorteil bei der Verwendung des Computers liegt natürlich auch darin, dass durch ihn immer exakte Konstruktionen erstellt werden. Allerdings verfügen die meisten DGS nicht über Befehle wie z.B. für das Bemaßen von Kanten, Stutzen/Stauchen etc., wie sie bei CAD-Programmen üblich und für das Erstellen von Plänen etc. hilfreich sind. Andererseits erlauben DGS durch den Zugmodus nachträglich Veränderungen an den Konstruktionen durchzuführen bzw. diese Änderungen auch dynamisch sichtbar zu machen. So können vom darzustellenden Körper Ansichten aus verschiedenen Richtungen erstellt werden und diese Richtungen auch dynamisch geändert werden. Bei GeoGebra oder auch anderen dynamischen Geometriesystemen besteht außerdem die Möglichkeit eigene Werkzeuge selbst neu zu definieren. Dabei werden einzelne Konstruktionsschritte zu einem „Makro“ zusammengefasst und in der Folge in einem Schritt angewandt. Diese Vorgangsweise ermöglicht übersichtliche Konstruktionen, da alle Hilfskonstruktionen verdeckt durchgeführt werden und führt zu einer modularen Betrachtungsweise, bei der sich Studierende auf zentrale Aspekte der Konstruktion bzw. der Problemlösung konzentrierten können (vgl. WEIGAND 2009, S. 76). Im Folgenden soll ein neues Werkzeug für das Konstruieren von Seitenrissen definiert werden. Ein Seitenrisspunkt P‘‘‘ liegt auf einer Normalen zur Seitenrissachse 13 durch den Punkt P‘, wobei sein Abstand von 13 gleich dem Abstand des Punktes P‘‘ von der wegfallenden Rissachse 12 ist (vgl. LICHTENSTEINER 1981, S. 28). Diese Schritte, die für die Konstruktion des Seitenrisses P‘‘‘ eines Punktes P‘ 9 erforderlich sind (siehe Abbildung 13 ), werden zu einem neuen Befehl SEITENRISS zusammengefasst. Seitenrisspunkt P‘‘‘ des Punktes P‘ bzgl. P‘‘ Dieses Werkzeug kann nun in verschiedenen Situationen zur Anwendung gelangen. Es kann z.B. dazu benutzt werden, die Höhe eines Tetraeders zu bestimmen bzw. einen Seitenriss zum Aufriss eines Tetraeders zu konstruieren (siehe Abbildung 14 ). Die Studierenden konzentrieren sich dabei nur auf die Lage oder die Auswahl der Seitenrissachse bzw. der wegfallenden Achse und der entsprechenden Punkte und nicht mehr auf die einzelnen Konstruktionsschritte. Da das Werkzeug SEITENRISS nur jeweils einen einzelnen Punkt erzeugt, werden die Hilfslinien in der Abbildung 14 nicht angezeigt. Dadurch bleiben die Konstruktionen letztendlich übersichtlicher. Sollten auch einzelne Hilfslinien sichtbar sein, muss das Werkzeug entsprechend neu definiert werden. 10 Seitenriss eines Tetraeders In einer dritten Phase können nun Untersuchungen an Hand der fertigen Konstruktion durchgeführt werden. So kann z.B. untersucht werden, wie der Abstand der Punkte B‘‘‘‘ und C‘‘‘‘ zueinander von der Lage der Seitenrisskante EF abhängt. Wählt man nun in Abbildung 14 die Seitenrisskante EF parallel zur Kante B‘‘D‘‘, so wird die Kante B‘‘‘‘D‘‘‘‘ im Seitenriss in wahrer Länge dargestellt. Das Konzept des Seitenrisses kann somit für das Bestimmen wahrer Längen herangezogen werden. Man beachte den Zyklus über das Erstellen eines Werkzeugs, das Anwenden des Werkzeugs für Konstruktionen und das Beobachten von Auswirkungen auf die Konstruktion, falls die Lage einzelner Objekte verändert wird. 6. Veranschaulichen von Konstruktionen aus der räumlichen Geometrie mit Hilfe von GeoGebra3D Mit Hilfe von GeoGebra3D können räumliche Körper dynamisch dargestellt werden. Dadurch ist es auch möglich, spezielle Konstruktionen der konstruktiven Geometrie, wie z.B. den Seitenriss eines Körpers oder dessen Normalriss auf eine konkrete Ebene, darzustellen bzw. zu veranschaulichen. 11 Wir demonstrieren dies am Beispiel eines Seitenrisses für einen Würfel. In der Abbildung 15 ist der Seitenriss eines Würfels bzgl. einer Ebene dargestellt, die normal auf die Grundrissebene steht. (vgl. LICHTENSTEINER 1981, S. 31) Seitenriss eines Würfels Das Zustandekommen dieser Darstellung kann mit Hilfe von GeoGebra3D veranschaulicht werden. Dazu errichtet man in GeoGebra3D einen Würfel auf der Basisebene 1 und legt eine Ebene 3 normal zu dieser Ebene (siehe Abbildung 16 ). Projiziert man nun mit Hilfe des Befehls FRONTALANSICHT den Würfel normal auf diese Ebene 3, so werden alle Objekte in eine Ansicht gedreht, bei der man frontal auf die Ebene 3 blickt. Von dem Würfel erhält man nun ein Bild (siehe Abbildung 17 ), das dem Seitenriss von Abbildung 15 entspricht. Durch die langsame Drehung wird der Effekt der Normalprojektion noch verstärkt. 12 3 3 1 Würfel in GeoGebra3D mit Frontalansicht des Würfels der Seitenrissebene 3 auf die Seitenrissebene 3 Seitenrisse müssen nicht unbedingt dem Grund- oder dem Aufriss eines Körpers zugeordnet werden. Befolgt man die Konstruktionsprinzipien für einen Seitenriss bzw. verwendet man für die Konstruktion das Werkzeug SEITENRISS (siehe Abschnitt 5), so kann man ausgehend von der Darstellung eines Seitenrisses eines Würfels einen weiteren Seitenriss erzeugen (siehe Abbildung 18 ). Seitenriss von einem Seitenriss 13 Wie kommt eine Darstellung wie diese zu Stande? Dazu projiziert man den Würfel normal auf eine weitere Ebene 4, die wiederum senkrecht auf die vorherige Ebene 3 steht. Zur besseren Veranschaulichung wurde das 3D-Bild zunächst so gedreht, dass die Seitenrissebene 3 waagrecht zu liegen kommt (siehe Abbildung 19 ). Projiziert man nun wiederum mit Hilfe des Befehls FRONTALANSICHT den Würfel auf die zweite Ebene 4, die normal auf die vorherige Projektionsebene 3 steht, so erhält man das Bild des Würfels wie in der Abbildung 20 . Es entspricht dem 2. Seitenriss in Abbildung 18 . 4 4 3 Seitenrissebene 3 in Normalprojektion des Würfels waagrechter Lage auf die Ebene 4 In der Abbildung 20 ist die Ebene 3 plötzlich unsichtbar. Dies kommt dadurch zu Stande, dass 3 in projizierender Lage zu 4 liegt. Beim Drehen von 4 in Normalansicht kann das Verschwinden von 3 sehr gut beobachtet werden. Diese möglicherweise auftretenden Irritationen beinhalten einen wünschenswerten Lerneffekt. Räumliche dynamische Geometriesysteme benötigen einige Erfahrung in der Handhabung, um effektiv eingesetzt werden zu können (vgl. WEIGAND 2009, S. 79). Dies gilt auch für GeoGebra3D. Ebenso ist ein gutes räumliches Vorstellungsvermögen erforderlich. Mit Hilfe von GeoGebra3D können Konstruktionen aus der dar- 14 stellenden Geometrie bzw. dem geometrischen Zeichnen veranschaulicht werden (vgl. LINDNER 2014). 7. Zusammenfassung Dynamische Geometriesysteme eignen sich besonders für das Veranschaulichen von geometrischen Sachverhalten. Durch den Zugmodus können verschiedene Situationen bzw. Fälle dynamisch untersucht werden. Sie verwenden für die Eingabe die üblichen Grundkonstruktionen, die über Buttons angesteuert werden können. Man benötigt für viele (einfache) Anwendungen keine komplizierte Syntax und ist dadurch sehr nahe am Schulalltag. Somit verlieren die Konstruktionen per Hand nicht ihre Bedeutung für den Unterricht, sie bieten vielmehr die Basis für den Einsatz von DGS und werden durch diese „zum Leben erweckt“. Da der Einsatz von DGS den Mathematikunterricht in der Schule in vielfältiger Weise bereichert, erscheint es unverzichtbar, auch in der Ausbildung von angehenden Lehrerinnen und Lehrer den Einsatz von DGS sowohl in fachlichen als fachdidaktischen Lehrveranstaltungen zu thematisieren. Literatur HOLLAND Gerhard (2007), Geometrie in der Sekundarstufe. Entdecken – Konstruieren – Deduzieren, Franzbecker: Hildesheim, Berlin KRAUTER Siegfried (2005), Erlebnis Elementargeometrie. Ein Arbeitsbuch zum selbstständigen und aktiven Entdecken, Spektrum Akademischer Verlag: München LICHTENSTEINER Karl (1981), Darstellende Geometrie, R. Oldenburg Verlag: Wien LINDNER Andreas (2014), GeoGebra3D – ein Überblick, dieser Band MEYER Karsten (2013), GeoGebra – Aspekte einer dynamischen Geometriesoftware, in: RUPPERT Markus & WÖRLER Jan (Hrsg.), Technologien im Mathematikunterricht. Eine Sammlung von Trends und Ideen, Springer Spektrum: Wiesbaden, 5-12 PÖCHTRAGER Hubert (2014), Entdeckendes Lernen mit GeoGebra, dieser Band 15 SCHUPP Hans (1977), Elementargeometrie, F. Schöningh: Paderborn WEIGAND Hans-Georg & FILLER Andreas & HÖLZL Reinhard & KUNTZE Sebastian & LUDWIG Matthias & ROTH Jürgen & SCHMIDT-THIEME Barbara & WITTMANN Gerald (2009), Didaktik der Geometrie für die Sekundarstufe I, Spektrum Akademischer Verlag: Heidelberg. 16