PPT
Werbung

GIN2 – Vorlesung, SS05
Prof. Dr. Wolfram Conen
7. Mai 2005
Inhalte:
- Repräsentation von Problemen
- Problemlösung durch Suche
SS - V1.0
(c) W. Conen, FH GE, GIN 2
1
Künstliche Intelligenz (KI)
„KI: Teilgebiet der Informatik, welches
versucht, menschliche Vorgehensweisen der
Problemlösung auf Computern nachzubilden,
um auf diesem Wege neue oder effizientere
Aufgabenlösungen zu erreichen“,
aus: Lämmel, Cleve: Künstliche Intelligenz, 2. Aufl. 2004,
Hanser Verlag
SS - V1.0
(c) W. Conen, FH GE, GIN 2
2
Problem 1 – Missionare und Kannibalen
Drei Missionare und drei Kannibalen sind auf der selben
Seite eines Flusses. Es gibt auf dieser Seite auch ein Boot, das
ein oder zwei Leute aufnehmen kann.
Problem: Finden Sie nun einen Weg, alle so auf die andere
Seite zu bekommen, dass die Zahl der Kannibalen die Zahl der
Missionare auf irgendeiner Seite des Flusses niemals
überschreitet (dann würden die Missionare nämlich gefressen...)
SS - V1.0
(c) W. Conen, FH GE, GIN 2
3
Wie löst man solch ein Problem?
Man „sucht“ nach einer Lösung
Aber zunächst mal muß man sich klar machen, WAS genau die
Aufgabe ist
Dann beginnt die Suche nach einer Lösungsmethode.
Man sucht nach einer günstigen Repäsentation des Problems
„Günstig“ ist sie, wenn man mit dieser Repräsentation „leicht“ eine Lösung
finden kann (für das „umformulierte“, repräsentierte Problem)
... und diese Lösung sich zurück übertragen lässt auf die ursprüngliche
Problemstellung – also das „tatsächliche“ Problem löst!
Und natürlich sollte die Repräsentation „beherrschbar“ sein, also möglichst
klein, verständlich („wartbar“), präzise, usw.
Oft hat man bereits eine Methode im Hinterkopf und schaut, ob man das
Problem passend repräsentieren kann (z.B. Graph-basierte Suche,
Constraint Optimization, Genetic Algorithms, Neuronale Netze, sehen sie,
wenn sie mögen, in INT im Master)
Wenn man die Methode (ev. auch mehrere) ausgewählt hat, dann
beginnt die tatsächliche Suche nach einer Lösung, und zwar „auf“
der gewählten Problemrepräsentation
SS - V1.0
(c) W. Conen, FH GE, GIN 2
4
Kannibalen haben Hunger...
Repräsentation des „Zustandes“ als Vektor
(m,k,b)
m = Anzahl Missionare
3,3,1
k = Anzahl Kannibalen
b = Position des Bootes
Wir brauchen nur eine Seite des Flußes
darstellen, wir nehmen die linke Seite (b = 1)
3,2,1
Es gilt immer: Missionare rechts = 3-m,
Kannibalen rechts = 3-k
Ev. mögliche Folgezustände (naiv) zu (m,k,1):
1m,1k
(m-1,k-1,0), (m-2,k,0), (m,k-2,0),(m1,k,0),(m,k-1,0)
Ev. mögliche Folgezustände (naiv) zu (m,k,0):
1k
(m+1,k+1,1), (m+2,k,1), (m,k+2,1),
2,2,1
(m+1,k,1),(m,k+1,1)
Startzustand: (3,3,1), Zielzustand: (0,0,0)
Suche nach eine Zustandsfolge vom Start
zum Ziel!
Problem: wir merken noch nicht, dass wir
ungültige Zustände verwenden...
SS - V1.0
(c) W. Conen, FH GE, GIN 2
1m,1k im Boot
2,2,0
1m
2,1,0
1m, 2k rechts...AUA!
5
Kannibalen haben Hunger...
Ungültige Zustände feststellen...z.B. durch
Aufzählen:
2,2,0
(m,k,b) mit m < k Æ m > 0 oder k < m Æ k < 3 ist
ungültig
Zugfolgen sind nur legal, wenn sie nicht über
ungültige Zustände führen
Wenn wir eine Funktion haben, die zu einem
Zustnd die gültige Folgezustände ausspuckt,
dann können wir direkt die Lösung finden!
Wenn wir eine haben, die nur alle „möglichen“
Zustände ausspuckt, dann müssen wir noch
die Gültigkeit prüfen
Beides läßt sich als Graph visualisieren!
(nächste Folie)
SS - V1.0
1m,1k im Boot
3,3,1
Möglicherweise sind nicht alle hiervon
erreichbar (überhaupt oder nur über gültige
Zustände)
Man könnte das auch abstrakt angeben:
(2,3,1),(1,3,1),(1,2,1)
(2,1,0),(2,0,0),(1,0,0)
(1,0,1),(2,0,1),(2,1,1)
(2,3,0),(1,3,0),(1,2,0)
3,2,1
1m
1m,1k
2,1,0
1k
1m, 2k rechts...AUA!
2,2,1
(c) W. Conen, FH GE, GIN 2
6
Die Rettung der Missionare (1)
3,3,1
2,2,0
2,3,0
2,3,1
3,2,0
1,3,0
3,1,0
3,2,1
1,2,0
2,1,0
3,0,0
3,1,1
1,1,0
SS - V1.0
(c) W. Conen, FH GE, GIN 2
7
Rettung der Missionare (2)
(3,1,1) ist der Vorgänger
1,1,0
2m, 2k rechts mit Boot
2,1,1
2,2,1
1,2,1
1,3,1
2,1,0
2,0,0
1,2,0
0,2,0
(gab‘s bereits)
0,3,1
0,1,0
0,2,1
1,1,1
2,1,1
1,2,1
(gab‘s bereits)
SS - V1.0
(c) W. Conen, FH GE, GIN 2
8
Rettung der Missionare (3)
(0,1,0) ist Vorgänger
SS - V1.0
0,2,1
1,1,1
0,0,0
1,0,0
(c) W. Conen, FH GE, GIN 2
9
Rettung...Kontrolle (1)
3,3,1
2,2,0
2,3,0
3,2,0
1,3,0
3,1,0
2,3,1
3,2,1
1,2,0
2,1,0
3,0,0
3,1,1
1,1,0
SS - V1.0
(c) W. Conen, FH GE, GIN 2
Gefundener Weg:
2 Kannibalen nach
rechts: (3,1,-,0,2,B)
oder 1M+1K nach
rechts: (2,2,-,1,1,B)
1 Kannibale zurück
oder 1M zurück, je
nach Wahl oben
(3,2,B,0,1,-)
2 K nach rechts:
(3,0,-,0,3,B)
1 K zurück:
(3,1,B,0,2,-)
2M nach rechts:
(1,1,-,2,2,B)
10
Rettung...Kontrolle (2)
1,1,0
2,1,1
2,2,1
1,2,1
1,3,1
2,1,0
2,0,0
1,2,0
0,2,0
0,3,1
0,1,0
0,2,1
SS - V1.0
1,1,1
2,1,1
(c) W. Conen, FH GE, GIN 2
1,2,1
Gefundener Weg:
1M+1K nach
links:
(2,2,B,1,1,-)
2 M nach rechts:
(0,2,-,3,1,B)
1 K nach links:
(0,3,B,3,0,-)
2 K nach rechts:
(0,1,-,3,2,B)
1K nach links:
(0,2,B,3,1,-) oder
1M nach links:
(1,1,B,2,2,-)
11
Rettung...Kontrolle (3)
0,2,1
1,1,1
0,0,0
1,0,0
Gefundener Weg:
2K nach rechts
oder
1M+1K nach rechts:
(0,0,-,3,3,B)
Lösungen:
(1) 2K, 1K, 2K, 1K, 2M, 1M+1K, 2M, 1K, 2K, 1K, 2K
(2) 2K, 1K, 2K, 1K, 2M, 1M+1K, 2M, 1K, 2K, 1M, 1M+1K
(3) 1M+1K, 1M, 2K, 1K, 2M, 1M+1K, 2M, 1K, 2K, 1K, 2K
(4) 1M+1K, 1M, 2K, 1K, 2M, 1M+1K, 2M, 1K, 2K, 1M, 1M+1K
SS - V1.0
(c) W. Conen, FH GE, GIN 2
12
Welche Probleme können auftreten?
Man findet keine „griffige“ Repräsentation, weil z.B.
Informationen fehlen oder „unscharf“ sind
Informationen unsicher/unglaubhaft sind
Man hat ein Problem vor sich, dass
im allgemeinen unlösbar ist (Halteproblem)
im allgemeinen „hart“ zu lösen ist (NP-komplett, EXP)
Man kennt keine sinnvolle Problemlösungsmethode für die
gefundene Repräsentation
Im Master werden Sie einige Methoden für verschiedene
Repräsentationen kennenlernen ...
... und wenn die richtige nicht dabei ist, dann können Sie mit
ihrem Wissen und ihrer Cleverness vielleicht einen (Er-)Finden!
SS - V1.0
(c) W. Conen, FH GE, GIN 2
13
Suche...nochmal generell
Angenommen, sie wollen ein Problem lösen ...
... dann suchen sie also nach einer Lösung
Viele Probleme lassen sich als Graph-Probleme modellieren
manchmal ist das unmittelbar klar (MST, kürzeste Wege, TSP)
manchmal braucht man einen „abstrakten“ Umweg:
SS - V1.0
Das Problem spielt sich in einem bestimmten „Realwelt“-Ausschnitt
ab, den man durch eine Menge von „Dingen“ und (regelhaften)
Beziehungen zwischen diesen Dingen beschreiben kann
Diese Dinge (und damit der Ausschnitt) befinden sich zu jedem
Betrachtungszeitpunkt in einem bestimmten Zustand
Modellieren kann man das z.B. durch Parameter/Variablen, denen
Wertebereiche zugeordnet sind und zwischen denen Relationen
bestehen.
Ein Zustand entspricht dann einer konkreten Belegung der
Parameter mit Werten
(c) W. Conen, FH GE, GIN 2
14
Suche (Forts. Problemlösen als Suche)
Aus den Wertebereichen und Beziehungen/Regeln ergeben sich die
möglichen Zustände des Realweltausschnitts
Es steht eine Menge an Operatoren zur Verfügung, um einen
Zustand in einen Folgezustand zu überführen
Ein Problem sieht dann wie folgt aus:
Gesucht ist eine clevere Sequenz von Operatoranwendungen,
die uns von einem gegebenen Ausgangszustand in einen
gewünschten Zielzustand führt.
Regelmäßig wollen wir zudem eine besonders „gute“
Operatorsequenz finden (z.B. eine kostengünstige, wenn wir
Kosteninformationen zu den Operatoren haben)
SS - V1.0
(c) W. Conen, FH GE, GIN 2
15
Suche (Forts. Problemlösen als Suche)
o1
z1
o2
o3
z2
z5
z8
z3
z6
z9
z4
z7
z10
z11
Ausgangszustand z1, Zielzustand z11
Es gibt viele mögliche Pfade inkl. Sackgassen
(z7,z8) und unerreichbare Zustände (z10)
SS - V1.0
(c) W. Conen, FH GE, GIN 2
16
Suche (Forts. Problemlösen als Suche)
o1
z1
o2
o3
z2
z5
z8
z3
z6
z9
z4
z7
z10
z11
Schauen wir uns noch eine der Sackgassen an
Um einen Weg zum Ziel zu finden, müssen wir einfach eine
Entscheidung für einen Operator zurücknehmen und ändern
Das nennt man „Backtracking“!
SS - V1.0
(c) W. Conen, FH GE, GIN 2
17
Suche (Forts. Problemlösen als Suche)
o1
z2
z5
z8
z3
z6
z11
z9
z4
z7
z10
o2
z1
o3
z11
Es gibt viele verschiedene Wege in diesem Zustandsgraphen
(wieviele?), manche dieser Wege führen zum Ziel, andere nicht
Um garantieren zu können, dass wir das Ziel erreichen (oder
sicher sein können, dass es nicht erreichbar ist), müssen wir
ggfs. alle von z1 aus begehbaren Wege anschauen
Wie können wir das systematisch tun?
SS - V1.0
(c) W. Conen, FH GE, GIN 2
18
Suche (Forts. Problemlösen als Suche)
o1
z1
o2
o3
z2
z5
z8
z8
z3
z4
z6
z9
z9
z7
z11
z9
z5
z8
z6
z9
z2
z5
z8
z3
z6
z10
Tiefensuche
z1
z4
z7
z9
z11
z11
z11
z8
z9
z11
z7
SS - V1.0
(c) W. Conen, FH GE, GIN 2
19
Suche (Forts. Problemlösen als Suche)
1
2
o1
z1
o2
o3
z2
z5
1
4
3
2
z8
1
2
z3
z6
1
4
3
2
z9
1
4
3
2
z11
z7
z9
z5
z8
z6
z9
z2
z5
z8
z3
z6
1
2
z4
z10
Breitensuche
z1
z8
z4
z7
z9
z11
z11
z11
z8
z9
z11
z7
SS - V1.0
(c) W. Conen, FH GE, GIN 2
20
Tiefensuche für Zustandsbäume
Hilfsdatenstruktur: Knoten k im Zustandsgraph sind mit
einem Zustand beschriftet, erhältlich über k.zustand
Genereller Ablauf für Tiefensuche in einem
Zustandsgraphen mit Baumform:
Algorithm tiefensuche(Knoten start)
for each k 2 Kinder(start) do
if k.zustand = zielzustand then
print „Ziel gefunden!“; return true;
else if tiefensuche(k) then return true;
return false;
Liefert sicher eine Lösung, wenn es eine gibt!
Achtung: Die Reihenfolge der Kinderbesuche ist nicht
vorgeschrieben, sie können frei wählen!
SS - V1.0
(c) W. Conen, FH GE, GIN 2
21
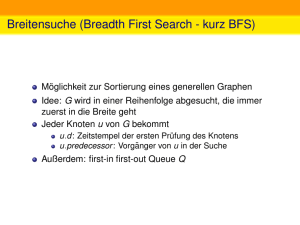
Breitensuche für Zustandsbäume
Wir verwenden eine FIFO-Queue queue (also eine Liste, an die hinten angefügt und
vorne entnommen wird, FIFO steht für first-in-first-out)
Genereller Ablauf für Breitensuche in einem Zustandsgraphen mit Baumform:
Algorithm breitensuche(Knoten start)
queue.append(start);
// queue leer vor Beginn
while (not queue.empty()) do
k à queue.deleteFirst();
// Knoten k besuchen
if k.zustand = zielzustand then
print „Ziel gefunden!“; return true;
for each c 2 Kinder(k) do // Knoten k expandieren
queue.append(c);
print „Kein Ziel gefunden!“; return false;
Anmerkung: Man kann auch vor dem Einstellen der Kinder prüfen, ob ein Zielzustand
erreicht ist. Wir können zeigen, dass das generell Speicher und Tests spart. Trotzdem
verwenden wir aus Gründen der Einheitlich (s. BestFirst) für die Aufgaben diese Variante.
Größenordnungsmäßig macht es keinen Unterschied...exponentiellen Zeit- und
Speicheraufwand erfordern beide Algorithmen in Best- und Worstcase (DFS nur im Worst
Case!)
SS - V1.0
(c) W. Conen, FH GE, GIN 2
22
Breitensuche für Zustandsbäume
Liefert sicher eine Lösung, wenn es eine gibt!
Achtung: Die Reihenfolge der Kinderbesuche ist nicht
vorgeschrieben, sie können frei wählen!
Bisher haben wir Zustandsräume in Baumform betrachtet
Da funktionieren beide Verfahren gut: beide sind „komplett“, d.h. sie
finden einen Zielzustand, wenn er existiert und erreichbar ist
Wenn die maximale Tiefe des Baumes d ist und der „flachste“
Zielzustand sich auf der Ebene m befindet und wir einen
„gleichmäßigen“ Verzweigungsfaktor b unterstellen, dann
Tiefensuche: best-case O(m), worst-case O(bd), average case:
hängt von der Verteilung der Zielzustände über die Tiefen
zwischen m und d ab
m
Breitensuche: best-case = average case = worst-case O(b ), falls
eine Lösung vorhanden ist, sonst best-case = average case =
worst-case = O(bd)
SS - V1.0
(c) W. Conen, FH GE, GIN 2
23
Suche für allgemeine Zustandsgraphen
Problem: ein Graph, der kein Baum ist, enthält einen Kreis, d.h. gleiche
Zustände können bei der Reise durch den Graphen mehrfach auftreten!
(s. Missionare)
Was passiert, wenn wir unsere Algorithmen auf einen Graphen mit
Kreis loslassen?
Die Tiefensuche läuft immer weiter „geradeaus“ und kann sich in
einer endlosen Schleife „aufhängen“
Wenn es eine Lösung gibt, findet die Tiefensuche sie dann nicht!
Wenn es keine Lösung gibt, merkt sie es nicht!
Die Breitensuche expandiert gleiche Knoten mehrfach
Kein „prinzipielles“ Problem, wenn es eine Lösung gibt – dann
wird diese auch gefunden (und zwar weiterhin die „flachste“) –
die Breitensuche ist also auch im „Wiederholungsfall“ komplett!
Wenn es allerdings keine Lösung gibt, dann merkt unser
einfaches Verfahren zur Breitensuche das nicht!
SS - V1.0
(c) W. Conen, FH GE, GIN 2
24
Beispiel: Suche in Kreisen mit Tiefensuche
GE
Startzustand
OB
OB
E
GE
GE
MH
D
OB
E
E
DUI
GE
DUI
MH
D
E
Unendliche Zweige können in dem Baum
entstehen, der die Wege durch den Zustandsgraphen darstellt (also die Suche beschreibt)!
Zielzustand
SS - V1.0
(c) W. Conen, FH GE, GIN 2
25
Suche
Kann man beide Verfahren noch „retten“?
Idee: wir können kontrollieren, ob es zu Zustandswiederholungen kommt
Knoten markieren bzw. die durch sie repräsentierten Zustände in einer
globalen „CLOSED“-Liste registrieren und nur einmal besuchen
Erweiterung der Algorithmen ist einfach:
besuchte Zustände werden in eine CLOSED-LISTE aufgenommen
Suchkosten: linear zur Anzahl der Zustände in der Liste
mit einem Bitfeld und nummerierten (oder „gut“ gehashten)
Zuständen kann man die (Zeit-)Kosten konstant und den
Speicher „erträglich“ halten (es sei denn, es gäbe sehr viele
Zustände)
Dann zwei Alternativen (zunächst nur für unsere Breitensuche
relevant)
1.
Nur Knoten in queue einstellen, die nicht in CLOSED sind
2.
Nur Knoten besuchen/expandieren, die nicht in CLOSED sind
SS - V1.0
(c) W. Conen, FH GE, GIN 2
26
Suche
Übrigens kann das zweite Verfahren besser sein, wenn der Test deutlich
teurer ist, als ein Einstellen sein sollte...denken sie an folgendes:
Nehmen Sie an, die Lösung auf Tiefe m wird dort als letzter Knoten
„angepackt“
Dann wurden vorher bereits bm-1 Knoten expandiert, also bm+1-b
Knoten in die queue gestellt und, bei Variante 1, auch getestet
Wenn Tests im Vergleich zum Einstellen teuer sind (wie in unserem
Fall), dann sollte man unnötige Tests vermeiden
In Variante 2 werden die Kinder von Knoten der Tiefe m zwar
eingestellt, aber nicht mehr getestet, das spart einen Zeitaufwand von
O(bm)*O(n)! (O(n) bei naiver Suche in CLOSED)
Allerdings kostet es mehr Speicher – und wenn man beim Grundablauf
die Kinder vor dem Einstellen auf die Zieleigenschaft testen würde,
sähe die Situation wieder anders aus...uns interessiert aber wieder
vorrangig die Größenordnung des Aufwands, und die kennen wir
bereits: exponentiell für Speicher und Zeit!
Sie sollten beide Varianten beherrschen!
SS - V1.0
(c) W. Conen, FH GE, GIN 2
27
Suche
Problem mit dem Markieren von Zuständen im Zustandsgraphen: der ist
häufig gar nicht explizit gegeben (und muß dann auch nicht explizit
repräsentiert werden), sondern wird nur durch einen Startzustand und eine
Zustandsübergangsfunktion beschrieben (vor allem empfehlenswert bei
unendlichen Zustandsräumen)
Schwerwiegender: Speichereffizienzüberlegungen!
es kann sehr viele (besuchte) Zustände geben, die muß man sich
dann ev. alle merken
SS - V1.0
in der Tiefensuche braucht man sonst nur alle Knoten entlang eines
Weges, also O(d)
bei der Breitensuche ohnehin jeweils komplette Ebenen, also max. O(bm)
bei Tiefensuche kann man sich manchmal auch durch „einfache“
Abbruchkriterien behelfen, um unendliche Zweige zu vermeiden, z.B.
wenn man weiß, dass es nur max. C Zustände gibt (dann macht man
immer noch Arbeit ggfs. doppelt, aber man braucht keine Liste)
Ähnliches geht auch mit Breitensuche. Wenn man sogar weiß, dass eine
Lösung existiert, dann kann man auch auf die Kontrolle von
Wiederholungen verzichten und ist dennoch komplett (macht aber ggfs.
mehr Aufwand, als erforderlich – abwägen: wie oft kommen
Wiederholungen vor?)
(c) W. Conen, FH GE, GIN 2
28
Breitensuche für Zustandsgraphen
Vermeiden von Wiederholungen für die Variante 2:
Genereller Ablauf für Breitensuche in einem Zustandsgraphen (queue und
closed zu Beginn leer), es wird nur ein Ziel gefunden (um alle zu finden,
schmeißen sie einfach das „return true“ raus und geben nur false zurück,
wenn sie gar keins finden, also zählen sie die gefundenen Ziele am besten
mit – so können sie natürlich auch die normale Breitensuche modifizieren)
Algorithm breitensuche(Knoten start)
queue.append(start);
while (not queue.empty()) do
k à queue.deleteFirst();
// Knoten k besuchen
if (not closed.in(k.zustand)) then
// Ist k in closed?
if k.zustand = zielzustand then
print „Ziel gefunden!“; return true;
closed.append(k.zustand);
for each c 2 Kinder(k) do // Knoten k expandieren
queue.append(c);
print „Ziel nicht gefunden“; return false;
SS - V1.0
(c) W. Conen, FH GE, GIN 2
29
Beispiel: Suche mit Pfadkosten
OB
10
20 Startzustand
Wir wollen weiterhin von
Gelsenkirchen nach D‘dorf
Aber jetzt wollen wir nicht nur
einen Weg finden, sondern
einen guten Weg!
Genauer: einen Weg durch
den Zustandsgraphen mit
minimalen Kosten (also einen
„kürzesten Weg“)
GE
DUI
13
15
12
MH
14
35
D
E
Zielzustand
SS - V1.0
(c) W. Conen, FH GE, GIN 2
30
Suche mit Pfadkosten
Was können wir tun?
SS - V1.0
Weiterhin Tiefen- oder Breitensuche verwenden und dort einfach nach
allen Lösungen suchen (Lösungen „enumerieren“) und die beste
auswählen! (ggfs. sehr teuer)
wir können auch mit Tiefensuche nur nach einer Lösung suchen und
dann hoffen, dass es die richtige ist...
manchmal wissen wir auch, dass die flachste Lösung die beste ist,
z.B. wenn alle Schrittkosten konstant und positiv sind
oder gleichmässig und einheitlich mit der Entfernung vom
Startzustand zunehmen (dann geht die normale Breitensuche, die
nur die flachste Lösung findet)
Wenn wir Wiederholungen vermeiden wollen, dann geht das nicht
ohne „Nachdenken“
wir müssen uns die bisher besten Kosten zu den Zuständen
merken
und im Wiederholungsfall die Erkundung eines Zweigs stoppen,
wenn die neuen Kosten zum wiederholten Zustand nicht kleiner sind
(c) W. Conen, FH GE, GIN 2
31
Suche mit Pfadkosten
Und sonst?
SS - V1.0
Wir verwenden die Kosteninformationen, um nach und
nach die vielversprechendsten Wege zu erkunden
(Russell/Norvig nennen das „Uniform cost“-Suche, kein
sehr passender Name)
Im Grunde ist das ein klassischer „Best-First“-Ansatz: der
Knoten mit den niedrigsten aufgelaufenen Kosten wird
zuerst expandiert
Wenn man weiß, dass die Kosten mit der Entfernung vom
Startknoten nicht abnehmen, dann kann man mit der ersten
gefundenen Lösung aufhören – sie muß optimal sein!
(c) W. Conen, FH GE, GIN 2
32
Suche mit Pfadkosten – Best-First
Uniform Cost Ablauf für Zustandsgraphen mit Vermeidung von Wiederholungen
nach Variante 2 (bei Uniform Cost kann auch Variante 1 lohnenswert sein, je
nach Probleminstanz)
Die Min-PQueue pqueue und die Closed List sind leer zu Beginn:
Algorithm bestFirst(Knoten start)
start.cost à 0; pqueue.insert(start); closed.append(start);
while (not pqueue.empty()) do
k à pqueue.deleteMin();
// Knoten k besuchen
if (not closed.in(k.zustand)) then
// Ist k in closed?
if k.zustand = zielzustand then
print „Ziel gefunden!“; return true;
closed.append(k.zustand);
for each c 2 Kinder(k) do // Knoten k expandieren
c.cost à k.cost + kante(k,c).cost;
pqueue.insert(c);
// Knoten c in PQueue ablegen
Der Wert der Knoten wird im Feld cost abgelegt.
Der Wert einer Kante wird ebenso abgelegt.
Ist fast genau Dijkstra, nur ein bisschen „blöder“, weil mehrfaches Einstellen
statt Update (kann zu spektakulär höherem Speicheraufwand führen!)
SS - V1.0
(c) W. Conen, FH GE, GIN 2
33
Uniform-Cost-Ablauf
OB
10
Startzustand
20
GE
pqueue (und closed in Klammern dahinter):
DUI
13
15
12
MH
14
35
D
SS - V1.0
E
GE/0
E/15, OB/20 (GE)
OB/20, MH/27, GE/30, D/50 (GE,E)
MH/27, GE/30, DUI/30, GE/40, D/50 (GE,E,OB)
GE/30, DUI/30, E/39, GE/40, DUI/40, D/50
(GE,E,OB,MH) GE in Closed!
DUI/30, E/39, GE/40, DUI/40, D/50 (GE,E,OB,MH)
E/39, GE/40, DUI/40, OB/40, MH/43, D/44, D/50
(GE,E,OB,MH,DUI) E,GE,DUI,OB, MH in Closed!
D/44, D/50, OB/50, MH/53 (GE,E,OB,MH,DUI)
D/44 gefunden!
(c) W. Conen, FH GE, GIN 2
34
Was geht noch „uninformiert“?
Simples „Greedy“:
Wenn wir nicht auf Wiederholungen achten, kann das zu endlosem
Pendeln zwischen zwei Zuständen führen
Verwende von deinem Knoten aus jeweils den günstigsten nächsten Schritt.
Im Beispiel würde er sich zwischen E und MH einpendeln
Also achten wir auf Wiederholungen (von Zuständen)
Das gibt aber noch keine Garantie, dass wir auch einen Zielzustand finden
(wir enden ggfs. in einer Sackgasse, die auch erst entstanden sein kann,
weil wir die Nachbarn bereits besucht haben)
Im Beispiel würde er in OB hängen bleiben
Also verwenden wir Backtracking („Zurückspringen“) und führen eine
CLOSED-List bereits verwendeter Kanten!
SS - V1.0
Im Beispiel besuchen wir dann folgende Kanten (und damit die Knoten):
{GE,E}, {E,MH},{MH,DUI},{DUI,OB},Backtrack,{DUI,D}
Also finden wir in diesem Beispiel nicht die optimale Lösung (aber immerhin,
wir finden jetzt sicher eine Lösung – das kann auch mal die Beste sein!)
(c) W. Conen, FH GE, GIN 2
35
Was geht noch „uninformiert“?
Wir können auch noch mittels Tiefensuche (depth-first search
oder kurz: DFS) die Breitensuche simulieren (mit oder ohne
Schrittkosten)
dann brauchen wir nicht auf Wiederholungen zu achten
und haben trotzdem ein vollständiges Verfahren für endliche
Zustandsräume
Das geht, indem wir ein Tiefenlimit einführen
Setze das Limit zu Beginn auf 0 (dann wird nur der Startzustand
angeschaut)
Erhöhe das Limit in jeder Runde um eins und beginne immer
wieder oben mit Tiefensuche, wiederhole das solange bis die
erste Lösung gefunden wurde
Dieses Verfahren nennt sich Iterative Deepening und ist für den
Fall ohne Schrittkosten die sinnvollste Wahl
SS - V1.0
(c) W. Conen, FH GE, GIN 2
36
Iterative Deepening
Die Implementierung ist simpel: Wie der Algorithmus Tiefensuche, aber
mit Abbruch des Abstiegs, wenn das Tiefenlimit erreicht ist (also
einfach ein Limit vorgeben und beim Aufruf von Tiefensuche einen
Parameter Tiefe, der schrittweise erhöht wird, hinzufügen – bei
Erreichen des Limits nicht mehr expandieren!)
Das Verfahren ist besser, als DFS, weil es sich nicht in endlose
Zweige verlaufen kann
Im Vergleich zur Breitensuche wiederholt es zwar eine Menge, aber es
muss sich wesentlich weniger merken (linear zur Lösungstiefe) und es
expandiert vor allem die Knoten auf Tiefe m nicht mehr! (es wird ab
einer gewissen Tiefe dramatisch günstiger als Breitensuche)
Es findet allerdings die beste Lösung nur, wenn es die flachste ist (wie
Breitensuche).
Man kann das leicht zu einem optimalen Verfahren machen, wenn man
sich die Kosten der besten bisher gefundenen Lösung merkt:
SS - V1.0
Solange es auf der Limitebene noch Knoten mit niedrigeren Kosten gibt, wird
weiter iteriert ...
...und dabei Knoten nicht expandiert, wenn sie nicht günstiger als die beste
bisherige Lösung sind.
(c) W. Conen, FH GE, GIN 2
37
Und was ist „informierte“ Suche?
Wenn wir zu den Zuständen z noch heuristische Informationen
h haben, die es uns erlauben, die Entfernung zum
nächsten/besten Zielknoten zu schätzen, also h(z)
Für einen gegebenen Knoten k mit Zustand k.zustand = z
können wir die bisherigen tatsächlichen Kosten des Wegs zu k,
angegeben durch g(k) und die noch zu erwartenden Kosten, h(k)
= h(k.zustand) = h(z) addieren
Diese Summe f(k) = g(k)+h(k) verwenden wir dann als
„Distanzwert“ in unserer PQueue für den Best-First-Algorithmus
von vorn
Dieses berühmte Verfahren nennt sich A* (Beispiel nächste
Folie), gesprochen „ä-star“
SS - V1.0
(c) W. Conen, FH GE, GIN 2
38
A*-Ablauf (auf Wiederholungen wird
nicht geachtet)
OB
10
Startzustand
20
GE
DUI
13
15 pqueue:
12
MH
14
35
D
SS - V1.0
Heuristische Informationen:
h(GE) = 30, h(OB) = 24, h(DUI) = 14,
h(MH) = 16, h(E) = 20, h(D) = 0
E
GE/0+30
E/15+20, OB/20+24
MH/27+16,OB/20+24, D/50+0,GE/30+30
OB/20+24, D/50+0, DUI/40+14,E/39+20, GE/30+30
DUI/30+14,D/50+0, DUI/40+14,E/39+20, GE/30+30,
GE/40+30
D/44+0, D/50+0, DUI/40+14,E/39+20, MH/43+16,
GE/30+30, GE/40+30, MH/43+16 (fertig)
(c) W. Conen, FH GE, GIN 2
39
Informierte Suche mit A*
Wenn die verwendete Heuristik „admissible“ ist – das ist sie, wenn sie die
tatsächlichen Kosten unterschätzt, dann ist A* optimal für endliche
Zustandsräume (bei nicht-negativen Pfadkosten, wie wir generell annehmen)
A* ist außerdem auch noch optimal effizient relativ zur Klasse der Algortihmen,
die einen solchen Suchbaum explorieren. Das Argument ist einfach:
A* untersucht alle Knoten mit niedrigeren tatsächlichen Kosten, als der optimale
Zielknoten
wenn ein anderer Algo einen dieser Knoten ausläßt, dann kann er nicht sicher sein,
das Optimum gefunden zu haben
Manchmal kann ein anderer Algo „zufällig mal“ besser sein, aber nicht immer! (A*
expandiert auch Knoten mit dem gleichen Gewicht wie der optimale Zielknoten, die
muss man aber nicht unbedingt anschauen!)
Das Vermeiden von Wiederholungen spielt auch wieder eine Rolle für die
Effizienz (und die Vollständigkeit des Algo) – hier helfen konsistente Heuristiken
(sie erfüllen die Dreiecksungleichung und sind admissible)
Natürlich können wir auch h verwenden, um „greedy“ loszulaufen (diesmal
stürzen wir uns nicht „greedy“ auf Kanten, sondern auf Nachfolger) – mit
ähnlichen Problemen und Resultaten, wie oben
...und einiges mehr (Praktisch relevant: Speicherbeschränkte Varianten von A*!)
SS - V1.0
(c) W. Conen, FH GE, GIN 2
40
Und sonst noch?
Man kann auch noch anders modellieren – man verwendet nur
komplette Lösungen und versucht dann durch Operatoren von einer
Lösung zur nächsten zu gelangen
Kann z.B. beim TSP sinnvoll sein: Zustände sind dann komplette
Rundtouren, man sucht die beste.
Man kann auch „partielle“ oder ungültige „Lösungsvorschläge“
zulassen und dann nach der besten gültigen Lösung in diesem
erweiterten Zustandsraum suchen
Und vieles mehr...wie wir noch sehen werden (aber leider erst im
Master)
SS - V1.0
(c) W. Conen, FH GE, GIN 2
41
Literatur zur Suche in Zustandsräumen
Russell, Norvig: Artificial Intelligence – the Intelligent Agent
Approach, Prentice-Hall, 2nd Edition (unbedingt die zweite
Auflage verwenden mit einem aktuellen Printing), International
Edition (billiger als das amerikanisch/kanadische Original), 2003
Russell ist Professor in Berkeley, eine der öffentlichen Top-Unis
(eine/die andere öffentliche Top-Uni in Informatik ist die UMICH in
Ann Arbor)
Norvig ist Director of Search Quality bei Google
Das Buch ist das „Standardwerk“ zu KI (=künstlicher Intelligenz),
es hat ein paar kleine Schwächen, z.B. wenn es um Optimierung
geht oder wenn man sehr präzise Details braucht, es gibt aber
einen exzellenten Überblick über viele Teilgebiete der KI (und fast
alles spannende gehört da „irgendwie“ zu...zumindest sehen das
die KI‘ler so...stimmt natürlich nicht so ganz, oder doch... ;-)
SS - V1.0
(c) W. Conen, FH GE, GIN 2
42