Formelsammlung Physik I Allgemein - Fakultät II
Werbung

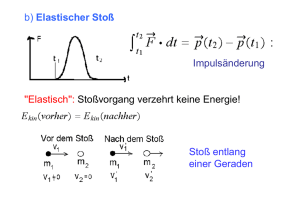
c Formelsammlung Physik 1 / Fakultät II / Hochschule Hannover Einführung Version 09.06.2015 s(t) s1 (t) = s01 + v01 · t + Sieben physikalische Basis-Größen. t s m n T I Iv [s] [m] [kg] [M ol] [K] [A] [cd] s3 (t) = s03 + v03 · t Zeit in Sekunden Strecke in Metern Masse in Kilogramm Stoffmenge in Mol Temperatur in Kelvin Stromstärke in Ampere Lichtstärke in Candela s2 (t) = s02 + v02 · t − 0 Skalare und Vektoren. |~s| = eines Vektors Geschwindigkeit Beschleunigung s(eindimensional) ~s(mehrdim.) 4s ds Durchs.: v = momen.: 4t dt 4v dv Durchs.: a = momen.: 4t dt 1.2 Eindimensionale gleichförmig beschleunigte Bewegung. v1 (t) = v01 + a1 · t v2 (t) = v02 − a2 · t 6 Wenn s0 = 0 und v0 6= 0, dann (v + v0 ) · t s(t) = 2 Fläche p im v-t-Diagramm v(t) = v02 + 2 · a · s v02 sB = − mit a < 0 (2 · a) v0 = 0, dann a · t2 v·t s(t) = = 2 √2 v(t) = 2 · a · s 1.3 Wurfbewegung. Zweidimensionale gleichförmig beschleunigte Bewegung. 8 ~a(t) = ~g = const mit ~g = ~v (t) = ~v0 + ~g · t ~s(t) = |~s(t)| = β= 0 −g ~g · t2 ~s0 + ~v0 · t + 2 p s2x + s2z sz arctan( ) Winkel zur Horizontalen sx 1.4 Waagerechter Wurf (x- und z- Richtung). 0 −g v0x −g ·t s0x + v0x · t g · t2 s0z − 2 1.5 Senkrechter Wurf (nach oben/unten). ax ~a(t) = = az v ~v (t) = x = vz s ~s(t) = x = sz v3 (t) = v03 4 Bremsweg: ax = az v ~v (t) = x = vz s ~s(t) = x = sz const (konstante Beschl.) v0 ± a · t a · t2 s(t) = s0 + v0 · t ± 2 0 0 + für beschleunigte und 0 0 − für abbremsende Bewegung. v(t) 2 denn s(t) = ~a(t) = a(t) = v(t) = 0 6 a2 · t2 2 t in s 8 1.1 Kinematische Größen. [m] m [ ] s m [ 2] s 4 s2x + s2y + s2z 1 Kinematik der geradl. Bew. Strecke 2 Wenn s0 = 0 und Eine skalare physikalische Größe hängt nicht von der Richtung ab. Richtungsabhängige physikalische Größen werden mit Hilfe von Vektoren dargestellt. t [s] Zeit ist ein Skalar ~s [m] Ortsvektor sx 1 0 0 sy = ~s = sx 0 + sy 1 + sz 0 sz 0q 0 1 Betrag a1 · t2 2 t in s Wurfhöhe 0 −g 0 ±v0 − g · t s0x g · t2 s0z ± v0 · t − 2 v02 szmax = (2 · g) c Formelsammlung Physik 1 / Fakultät II / Hochschule Hannover 1.6 Schräger Wurf (x- und z- Richtung). ax = az v ~v (t) = x = vz s ~s(t) = x = sz ~a(t) = 0 −g v0 · cos(β) ±v0 · sin(β) − g · t s0x + v0 · cos(β) · t g · t2 s0z ± v0 · sin(β) · t − 2 Winkel β zwischen ~v und der Horizontalen. v02 · sin2 (β) Wurfhöhe szmax = 2·g 2 · v02 · cos(β) · sin(β) Wurfweite sxmax = g 2 Kinematik der Drehbewegung. 2.1 Kinematischen Größen. Winkel Umdrehungen Winkelgeschw. Drehzahl Winkelbeschl. Tangentialbeschl. Radialbeschl. Bahngeschw. Bahnstrecke φ = [rad] in Bogenmaß φ N= = [umdr] 2π 4φ dφ Durchs.: ω = momen.: 4t dt 1 ω = n= 2π T 4ω dω Durchs.: α = momen.: 4t dt at = α · r v2 ar = ω 2 · r = r 2π · r v = ω · r = 2π · n · r = T s = φ · r = 2π · N · r 2.2 Gleichförmig beschleunigte Bewegung. rad α(t) = [ 2 ] s rad ] ω(t) = [ s umdr n(t) = [ ] s φ(t) = [rad] N (t) = [umdr] Wenn N0 = 0 und denn N (t) = Wenn N0 = 0 und Version 09.06.2015 2. Newtonsches Axiom Wirkt auf einen Körper eine resultierende äußere Kraft, dann ist diese proportional der Masse des Körpers und seiner Beschleunigung: F~res = m · ~ares . 3. Newtonsches Axiom Wirkt ein Körper auf einen anderen Körper mit einer Kraft ein, so wirkt der andere auf den ersten mit der vom Betrag gleichen Kraft aber mit der entgegengesetzen Richtung: Factio = −Freactio . 3.2 Kräfte F = [N ] Ursachen der Bewegung Antriebskräfte: Gewichtskraft Hangabtriebskraft Winkel β zwischen der Widerstandskraft: Seilkraft Federkraft Federn parallel Federn in Serie Reibungsskräfte: Haftreibung Gleiteibung Rollreibung Trägheitsskraft: d’Alembert: Geleistete Arbeit Mittlere Arbeit Hubarbeit Verformungsarb. Beschleunigungsarb. Wirkungsgrad ω0 ± α · t n0 ± α·t 2π F~S F~D = −D · ~s D = D1 + D2 D = D1 · D2 /(D1 + D2 ) F~HR = −µHR · m · ~g · cos(β) F~GR = −µGR · m · ~g · cos(β) F~RR = −µRR · m · ~g · cos(β) F~ = −m · ~a PT r ~ Fi − m · ~a = 0 i 3.3 Arbeit W = [J] = Kraft · Weg. Reibungsarbeit const F~G = m · ~g F~HA = m · ~g · sin(β) schiefen Ebene und der Horizontalen. W = F~ · ~s = F · s · cos(β) W = F~mittel · 4~s WH = m · g · h D · s2 WE = 2 WR = µ · m · g · cos(β) · 4s m · v2 WB = 2 η = WN utz /WGes 3.4 Energie E = [J] = gespeicherte Arbeit. 2 α·t 2 α · t2 N0 + n 0 · t ± 4π n0 6= 0, dann: (n + n0 ) · t N (t) = 2 Fläche r im n-t-Diagramm α·N n(t) = n20 + π n0 = 0, dann: α · t2 n·t N (t) = = 2 r4π 2·α·N n(t) = 2π φ0 + ω0 · t ± EL = m · g · h D · s2 Spannungsenergie ES = 2 m · v2 Kinetische En. EKin = 2 J · ω2 Rotationsenergie ERot = P 2 dem Satz von d’Alembert i Fi − m · ~a = 0 entspricht: EL − ES − WR − EKin − ERot = const Lageenergie 3.5 Leistung P = [W ] = [J/s] Arbeit pro Zeit. Leistung Falls F = const 4W (mittlere) 4t P = F · v (momentane) P = 3 Dynamik der geradl. Bew. 4 Impuls p = Masse · Geschw. 3.1 Newtonsche Axiome. 4.1 Definition. 1. Newtonsches Axiom Wirkt auf einen Körper keine resultierende äußere Kraft, dann verharrt dieser im Zustand der geradlinigen gleichförmigen Bewegung (d.h. ~v = const oder = 0.) p~ = m · ~v = [kg · m/s] Impulserhaltung: Wirkt keine äußere Kraft, so bleibt Impuls erhalten. P F~ = p~˙ = 0 ⇒ p~ = i p~i = const Impuls c Formelsammlung Physik 1 / Fakultät II / Hochschule Hannover Version 09.06.2015 4.2 Kraftstoß. d~ p d(m~v ) Verallg. 2. Newtonsches Axiom: F~ = = dt dt 4~ p Kraftstoß F~ (t) = 4t Impulsübertrag 4~ p = p~Ende − p~Anf ang = F · 4t R ~ 4~ p = F (t)dt = Flächen in Fx − t, Fy − t, Fz − t Diag. 4.3 Gerader zentraler elastischer Stoß. ~u1s = ~v1s ~u2s = ~v2s m1 − m2 2 · m2 · ~v1p + · ~v2p m1 + m2 m1 + m2 2 · m1 m2 − m1 = · ~v1p + · ~v2p m1 + m2 m1 + m2 ~u1p = ~u2p 5 Dynamik der Rotation. 5.1 Definitionen. Impuls vor dem Stoß = Impuls nach dem Stoß Radialbeschl. m1 · ~v1 + m2 · ~v2 = m1 · ~u1 + m2 · ~u2 Ekin vor dem Stoß = Ekin nach dem Stoß m1 · ~u21 m2 · ~u22 m1 · ~v12 m2 · ~v22 + = + 2 2 2 2 Aus den beiden oberen Gleichungen ergeben sich die Geschwindigkeiten der Körper nach dem Stoß: m1 − m2 2 · m2 · ~v1 + · ~v2 m1 + m2 m1 + m2 2 · m1 m2 − m1 ~u2 = · ~v1 + · ~v2 m1 + m2 m1 + m2 ~u1 = 4.4 Gerader zentraler unelastischer Stoß. Impuls vor dem Stoß = Impuls nach dem Stoß m1 · ~v1 + m2 · ~v2 = m1 · ~u1 + m2 · ~u2 Tangentialbeschl. Zentripetalkraft Zentrifugalkraft Corioliskraft Richtung: ~ar ⊥ ~v v2 Betrag |~ar | = = ω2 · r r Richtung: ~at k~v Betrag |~at | = α · r m · v2 = m · ω2 · r |F~ZP | = r F~ZF = −F~ZP (Trägheitskraft) F~Cor = −2 · m · ω ~ × ~v (Trägheitskraft) 5.2 Rotierender starrer Körper. Dichte Schwerpunkt Massenträgheitsmoment R R (J = r2 dm = r2 ρdV ) Rotationsenergie Ekin vor dem Stoß = (Ekin + 4W ) nach dem Stoß m1 · ~u21 m2 · ~u22 m1 · ~v12 m2 · ~v22 + = + + 4W 2 2 2 2 4W ist die Deformationsenergie. 4.5 Ger. zentr. vollständig unel. Stoß. Eine gemeinsame Geschwindigkeit nach dem Stoß: Impuls vor dem Stoß = Impuls nach dem Stoß m1 · ~v1 + m2 · ~v2 = (m1 + m2 ) · ~u kg m = [ 3] V m P ri i mi · ~ ~s = P m P i i J = i mi · ri2 = [kg · m2 ] ρ= ERot = J · ω2 = [Joule] 2 5.3 Massenträgheitsmom. versch. Körper. Massenpunkt J = mR2 Vollylinder J = mR2 /2 Hohlzylinder J = mR2 , wenn dünne Wände Hohlzylinder J = m(R2 + r2 )/2, wenn dicke Wände Dünner Stab J = ml2 /12 (quer durch die Mitte) Dünner Stab J = ml2 /3 (Rotationsachse am Ende) Kugel J = 2mR2 /5 Steiner J = JSchwerpunkt + m · s2 wobei s = Abstand zw. Schwerpunkt- und Rotationsachse Ekin vor dem Stoß = (Ekin + 4W ) nach dem Stoß m1 · ~v12 /2 + m2 · ~v22 /2 = (m1 + m2 ) · ~u2 /2 + 4W 4.6 Schräger elastischer Stoß. Impuls vor dem Stoß = Impuls nach dem Stoß m1 · ~v1 + m2 · ~v2 = m1 · ~u1 + m2 · ~u2 Ekin vor dem Stoß = Ekin nach dem Stoß m1 · ~v12 m2 · ~v22 m1 · ~u21 m2 · ~u22 + = + 2 2 2 2 Zerlege die Geschwindigkeitsvektoren in zwei Komponenten: eine parallel zur Verbindungslinie der beiden Schwerpunkte ~v1p und andere Komponente senkrecht ~v1s dazu. Die senkrechten Komponenten sind vor und nach dem Stoß identisch. Die parallelen Komponenten verhalten sich genau wie im Fall des geraden zentralen elastischen Stoßes. 5.4 Drehmomente M = [N · m] Ursachen der Bewegung Richtung Betrag Antriebsmomente: Gewichtsdrehmoment Hangabtriebsdrehmom. Widerstandsmom.: Seilmoment Federmoment Federn parallel Federn in Serie Reibungsmom.: Reibungsdrehmom. Trägheitssmom.: d’Alembert ~ = ~r × F~ M ~ | = r · F · sin(β) |M MG = r · m · g MHA = r · m · g · sin(β) ~ Seil = P F~Si · R M i MD = −D∗ · φ D∗ = D1∗ + D2∗ D∗ = D1∗ · D2∗ /(D1∗ + D2∗ ) MReib = −µReib · r · m · g · cos(β) M PT r = −J · α i Mi − J · α = 0 c Formelsammlung Physik 1 / Fakultät II / Hochschule Hannover 5.5 Arbeit W = [J] = Drehmoment · Winkel. geleistete Arbeit Spannungsarb. Reibungsarbeit Rotationsarbeit Wirkungsgrad W = Mdurchs. · 4φ D ∗ · φ2 WE = 2 WReib = MReib · 4φ J · ω2 WRot = 2 WN utz η= WGes 5.6 Energie E = [J] = gespeicherte Arbeit. P Dem Satz von d’ Alembert i Mi − J · α = 0 entspricht Energieerhaltungssatz: EL −ES −WR −EKin −ERot = const Version 09.06.2015 7 Gravitation und Planetenbewegung. 7.1 Gravitationskraft = G · M · m/r2 = 6, 67 · 10−11 N m2 /kg 2 (Gravitationskonstante) = G · MErde · m · [1/RErde − 1/(RErde + h)] 2 = m · (G · MErde /RErde )=m·g 2 = 9, 81m/s (Erdbeschleunigung) FGrav. G Epot FG g 7.2 Raketengleichung Änderung des Impulses der Rakete (Ra) = - Änderung des Impulses des Treibstoffs (Tr) 4~ pRa = −4~ pT r mRa · 4~vRa = −4mT r · ~vT r 5.7 Leistung P = [W ] = Arbeit pro Zeit. Leistung 4W (mittlere) 4t P = M · ω (momentane) P = Falls M = const 6 Drehimpulserhaltung. 6.1 Drehimpuls L = [kg · m2 /s] ~ = ~r × p~ = ~r × m~v Richtung L ~ = r · m · v · sin(β) = J · ω Betrag |L| Drehimpulsänderung = Drehmoment (LEnd − LAnf ) M = r · F · sin(β) = J · α = 4t ~ =L ~˙ = J˙ · ω M ~ +J ·ω ~˙ Drehimpulserhaltung: Kein äußeres Drehmoment ⇒ Drehimpuls erhalten. ~ End − L ~ Anf ) (L ~ End = L ~ Anf =0 ⇒ L 4t ~vRa = −~vT r · ln(m0 /mRa ) + ~v0 7.3 Keplersche Gesetze 1. Keplersches Axiom: Planetenbahnen sind Ellipsen mit Sonne in einem der Brennpunkte. 2. Keplerssches Gesetz: Die Verbindungsgerade vom Planeten zur Sonne überstreicht in gleicher Zeit gleiche Flächen. 3. Keplersches Gesetz: T12 /T22 = r13 /r23 , wobei T1 und T2 Umlaufzeiten der Planeten um die gleiche Sonne. r1 und r2 sind große Halbachsen der Ellipsen. 8 Verschiedenes. 8.1 Volumina verschiedener Körper Kugel Zylinder Kegel 6.2 Vollständig unelastischer ”Stoß”. Pyramide Eine gemeinsame Winkelgeschwindigkeit nach dem Stoß: Drehimpuls vor dem Stoß = Drehimpuls nach dem Stoß J1 · ω ~ 1 + J2 · ω ~ 2 = (J1 + J2 ) · ω ~3 Erot vor dem Stoß = (Erot + 4W ) nach dem Stoß J1 · ω12 J2 · ω22 (J1 + J2 ) · ω32 + = + 4W 2 2 2 Quader 4 VKugel = πR3 3 VZylinder = πR2 · h 1 VKegel = πR2 · h 3 1 VP yramide = Breite · T ief e · Hoehe 3 VQuader = Breite · T ief e · Hoehe 8.2 pq-Formel (Lsg. quadratischer Gleichung). 2 Lösung einer quadratischen Gleichung rx + p · x + q = 0 ist p p bekannt als pq-Formel: x1,2 = − ± ( )2 − q 2 2