Distanzbestimmung zu offenen und Kugelsternhaufen
Werbung

Bachelorarbeit 2008
Distanzbestimmung zu offenen und
Kugelsternhaufen
Andreas Riedo
August 2008
Astronomisches Institut
Universität Bern
Zusammenfassung
Das Ziel der vorliegenden Arbeit ist eine Distanzbestimmung zu einem offenen Sternhaufen
mittels einem Main-Sequence Fittings - auch Hauptreihenanpassung genannt - und zu einem
Kugelsternhaufen unter Verwendung von veränderlichen Sternen durchzuführen. Als Objekte wurden hierbei der junge und helle offener Sternhaufen M44 und der Kugelsternhaufen
M3, welcher viele RR-Lyrae Sterne besitzt, ausgewählt. Bevor jedoch eine solche Bestimmung durchgeführt werden kann, müssen im Vorfeld einige grundlegende Themen wie z.B die
Photometrie, Theorie der angewandten Distanzbestimmungsmethoden usw. diskutiert und
erläutert werden. Aus diesem Grund wird im ersten Teil dieser Arbeit - dem Theorieteil die Thematik der betrachteten Sterngebilde, der Photometrie und die Theorie der angewandten Bestimmungsmetoden vollumfänglich behandelt. Im zweiten Abschnitt der Arbeit - dem
experimentellen Teil - werden schlussendlich die erhaltenen Resultate und deren möglichen,
dahinter liegenden Problematiken ausführlich diskutiert werden.
Folgend, eine kurze Übersicht der erhaltenen Distanzen zum Kugelsternhaufen M3 und zum
offenen Sternhaufen M44. Ausführliche Diskussionen sind den Kap. 2.3.1 und 2.3.2 zu entnehmen.
Tabelle 0.1: Übersicht der erhaltenen Distanzen zu M3 und M44
Objekt
erhaltene Distanz in [pc]
Refernzdistanzen in [pc]
M3:
(9487 ± 255) pc;
9162 pc nach [Sandage and Cacciari, 1990];
9954 pc nach [Longmore et al., 1990];
M44:
(144.4 ± 86.7) pc;
(171 ± 4) pc nach [Pinsonneault et al., 1998];
(177 ± 10) pc nach [Pinsonneault et al., 1998];
Inhaltsverzeichnis
1 Theoretische Grundlagen
1.1 Sternhaufen . . . . . . . . . . . . . . . . . . . . . . . .
1.1.1 Offene Sternhaufen . . . . . . . . . . . . . . . .
1.1.2 Kugelsternhaufen . . . . . . . . . . . . . . . . .
1.2 Physikalisch veränderliche Sterne . . . . . . . . . . . .
1.2.1 Übersicht . . . . . . . . . . . . . . . . . . . . .
1.2.2 RR-Lyrae Sterne . . . . . . . . . . . . . . . . .
1.3 Photometrie . . . . . . . . . . . . . . . . . . . . . . . .
1.3.1 Differenzielle Photometrie . . . . . . . . . . . .
1.3.2 All Sky Photometrie . . . . . . . . . . . . . . .
1.3.3 Landold Standardsterne . . . . . . . . . . . . .
1.3.4 Korrekturaufnahmen . . . . . . . . . . . . . . .
1.4 Modelle der Distanzbestimmung . . . . . . . . . . . .
1.4.1 Trigonometrische Parallaxen . . . . . . . . . .
1.4.2 Stromparallaxen . . . . . . . . . . . . . . . . .
1.4.3 RR Lyrae . . . . . . . . . . . . . . . . . . . . .
1.4.4 Main Sequence Fitting - Hauptreihenanpassung
2 Experiment
2.1 Apparatur und Software . . . .
2.2 Fehlerrechnung . . . . . . . . .
2.3 Resultate und Diskussion . . .
2.3.1 Distanzbestimmung zum
2.3.2 Distanzbestimmung zum
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . . . . . . . . . . . . .
. . . . . . . . . . . . . . .
. . . . . . . . . . . . . . .
Kugelsternhaufen M3 . .
Offenen Sternhaufen M44
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
5
5
5
6
8
8
10
11
11
13
15
16
19
20
21
22
23
.
.
.
.
.
26
26
26
26
26
29
3 Zusammenfassung - Angewandte Methoden
44
4 Dank
45
A Ausgleichungsverfahren für Distanzbestimmung von M3
49
4
1 Theoretische Grundlagen
1.1 Sternhaufen
Das Unterkapitel Sternhaufen“ soll als kleine Einführung der später vermessenen Objekte
”
betrachtet werden. Hierbei wird absichtlich nicht auf jedes Detail eingegangen, da dies sonst
den Umfang der vorliegenden Arbeit massiv erhöhen würde. Weiterführende Literatur zu
diesen Themen sind z.B. [Unsöld and Bascheck, 2005, Sparke and Gallahger, 2007, Scheffler
and Elsässer, 1982].
1.1.1 Offene Sternhaufen
Die offenen Sternhaufen stellen eine Ansammlung von Sternen dar, welche alle ungefähr gleich
weit entfernt sind und, im Gegensatz zu den Kugelsternhaufen (siehe Kapitel 1.1.2), ohne grössere Probleme mit bodengestützten Messeinrichtungen unterschieden werden können.
Man unterscheidet zwischen jungen (kaum 106 Jahre alt) und alten Sternhaufen (bis zu 1010
Jahre alt). Die wohl bekanntesten solcher Objekte stellen die Pleiaden1 und Hyaden sowie
die Doppelhaufen h und χ Persei dar (siehe Abb. 1.1). Wie man den Abbildungen schon
entnehmen kann, können Sternhaufen aus nur wenigen Dutzend bis einigen hundert Sternen
bestehen. Daraus folgt, dass die Sterndichten zum Haufenzentrum von Haufen zu Haufen
unterschiedlich sind.
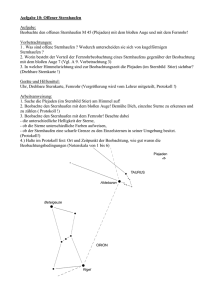
Abbildung 1.1: Links eine Aufnahme der Pleiaden und rechts des Doppelsternhaufens h und
χ Persei. Beim Doppelsternhaufen ist zu beachten, dass nicht alle sichtbaren
Sterne zum Haufen gehören - Um eine Aussage zur Zugehörigkeit eines Sterns
zu einem Haufen zu machen, ist man auf die Eigenbewegungen sowie eventuell
durch Radialgeschwindigkeiten dessen angewiesen. [NASA].
Die offenen Sternhaufen können (102 − 103 ) Sonnenmassen enthalten, besitzen Durchmesser
von (1 − 10) pc2 und sind gegen die galaktische Ebene hin konzentriert (siehe Abb. 1.2).
1
2
Die Pleiaden können in einer klaren Nacht von blossem Auge beobachtet werden!
1 pc = 3.086 · 1016 m = 2.063 · 105 AE = 3.26 Lichtjahre.
5
1 Theoretische Grundlagen
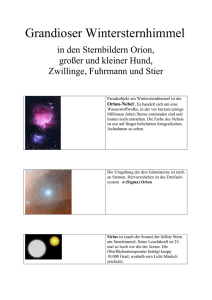
Abbildung 1.2: Verteilung von jungen offenen Sternhaufen (schwarze Punkte) in der Milchstrassenebene. Die Sonne befindet sich in der Mitte des Koordinatensystems,
bei galaktischer Länge l = 0◦ . [Unsöld and Bascheck, 2005].
Die Gesamtanzahl der offenen Sternhaufen in unserer Galaxie wird momentan auf ungefähr
200 000 geschätzt, von denen aber bis heute nur ungefähr 10 000 beobachtet wurden! Dies
wird einerseits durch das Vorhandensein von Dunkelwolken (siehe Abb. 1.3) erklärt, welche mehr oder weniger das gesamte Licht absorbieren, resp. nicht zu uns hindurchlassen und
andererseits durch grössere Entfernungen. Die lockeren Bewegungshaufen3 und die OB- sowie T-Assoziationen4 werden als Verwandte der offenen Sternhaufen betrachtet [Unsöld and
Bascheck, 2005].
1.1.2 Kugelsternhaufen
Die Kugelsternhaufen, von denen die meisten 10 - 12 miliarden Jahre alt sind [Unsöld and
Bascheck, 2005] und deswegen keine jungen O und B Sterne mehr haben [Schildknecht, 2007],
zählen zu den ältesten Objekten in unserem Milchstrassensystem. Diese Gebilde sind im Halo unserer Galaxie angesiedelt wobei sie in langgestreckten, ellipsenartigen Bahnen mit einer
ungefähren Geschwindigkeit von (100 − 300) km/s relativ zu unserer Sonne, um das Galaxienzentrum kreisen. Eine grössere Konzentration von solche Haufen ist in Richtung ScorpiusSagittarius zu beobachten [Unsöld and Bascheck, 2005]. Viele der Kugelsternhaufen, im Gegensatz zu offenen Sternhaufen, kommen auch in hohen Galaktischen Breiten vor. In diesem
Zusammenhang ist zu erwähnen, dass man hier zwischen zwei Arten“ von Kugelsternhaufen
”
unterscheiden muss: Da wären zum einen die Disk-Haufen, welche häufiger in der Nähe des
Zentrums zu finden sind und einen etwas höheren Metallgehalt von [F e/H] > −0.8 haben
und zum anderen die Halo-Haufen, welche weiter vom Zentrum entfernt (siehe Abb. 1.4) und
mit einem Wert von [F e/H] ≤ −0.8 metallärmer sind [Trefzger, 2008].
Momentan sind ungefähr 150 Kugelsternhaufen in unserer Milchstrasse beobachtet worden,
wobei ω Centauri, mit ungefähr einer Million Sternen und einer Leuchtkraft von ca. 106 L
[Sparke and Gallahger, 2007], und 47 Tucanae die beiden hellsten Gebilde darstellen. Im
Gegensatz zu den offenen Sternhaufen, ist ein typischer Kugelhaufen mit 40 pc Durchmesser
nicht nur viel grösser, sondern besitzt mit einigen 105 Sternen auch deutlich mehr Sterne
3
4
6
Eigenbewegungsvektoren der Sterne dieser Gruppe zielen gegen einen Konvergenzpunkt hin.
Sternansammlungen von einem bestimmten Typ.
1.1 Sternhaufen
Abbildung 1.3: Abgebildet ist die südliche Milchstrasse mit der uns benachbarten Dunkelwolke “Kohlensack“ (rechts im Bild, mitte). Diese Staubwolke hat eine Ausdehnung von 5◦ - 8◦ und eine Entfernung von ungefähr 170 pc. Wie man hier
gut erkennen kann, wird das Hintergrundlicht von einer solchen Wolke fast
vollständig absorbiert - Beobachtungen werden dadurch stark erschwert oder
sogar verunmöglicht. [Unsöld and Bascheck, 2005].
Abbildung 1.4: Auf der linken Abbildung ist die Verteilung der metallreichen Kugelsternhaufen abgebildet - die Disk Haufen - und rechts diejenige von den metallärmeren
- den Halo Haufen. Die ausgezogene Linie stellt der galaktische Äquator dar.
[Trefzger, 2008].
(siehe Abb. 1.5), weshalb die mittlere Sternendichte eines Kugelhaufens ungefähr zehnmal
höher ist, als bei offenen Haufen. Die Dichte der Sterne (siehe Abb. 1.5) nimmt gegen das
Zentrum stark zu, in den helleren Haufen so stark, dass man die Sterne in deren Zentren
mit Erdbobachtungen nicht mehr genügend auflösen kann - dies wurde erst mit dem Hubble
Weltraumteleskop möglich [Unsöld and Bascheck, 2005].
Die uns bekannten Kugelsternhaufen zeigen untereinander deutlich individuelle Unterschiede
auf - es werden Massen von (103 − 106 ) Sonnenmassen, Durchmesser von (20 − 150) pc, sowie
7
1 Theoretische Grundlagen
Abbildung 1.5: Eine Aufnahme des Hubble Weltraumteleskops des Kugelsternhaufens M80 im
Sternzeichen Skorpion. Wie man erkennen kann, besitzt M80 deutlich mehr
Sterne als ein offener Sternhaufen - vgl. dazu Abb. 1.1. [NASA].
absolute, visuelle Magnituden von (−1.7 − 10.1) mag beobachtet! Des Weiteren enthalten viele
der Kugelhaufen einen relativ hohen Anteil an Doppelsternen [Unsöld and Bascheck, 2005].
1.2 Physikalisch veränderliche Sterne
1.2.1 Übersicht
Im Gegensatz zu statischen Sternen, zeichnen sich physikalisch5 Veränderliche durch beobachtbare Phänomene“ (Änderungen) aus, wie zum Beispiel durch An- und Absteigen der
”
Leuchtkraft oder durch Änderungen des Spektrums usw. Die Abb. 1.6 gibt eine Übersicht
über die Lage einiger wichtiger Typen von solchen Veränderlichen im Herzsprung-RusselDiagramm.
An dieser Stelle ist jedoch zu erwähnen, dass eine Diskussion aller auf der Abbildung aufgeführten Typen nicht durchgeführt werden kann - dies würde den Umfang der Arbeit massiv
erhöhen und ist auch nicht Gegenstand der Arbeit als solches. Da aber in einem später aufgeführten Distanzbestimmungsmodell (siehe Kapitel 1.4.3) ein Typ von veränderlichen Sternen verwendet wird (RR-Lyrae), ist es dennoch wichtig, genau diesen hier und im nächsten
Unterkapitel 1.2.2 eingehender zu behandeln.
Die in der Abb. 1.6 aufgeführten Typen von Veränderlichen können in folgende Hauptgruppen
eingeteilt werden:
1. Pulsierende Sterne - R Coronae Borealis Sterne
Pulsierende Sterne sind meistens Riesensterne, wobei auch auf der Hauptsequenz und unter den weissen Zwergen pulsierende Sterne beobachtet werden. In diese Gruppe gehören:
• RR-Lyrae oder Haufenveränderliche (siehe Kap. 1.2.2)
• δ Cephei - klassische Cehpeiden
5
8
Neben physikalisch Veränderlichen existieren auch Bedeckungsveränderliche; weiterführende Informationen
zu diesem Thema in [Unsöld and Bascheck, 2005].
1.2 Physikalisch veränderliche Sterne
Abbildung 1.6: Typen von veränderlichen Sternen im HRD. [Unsöld and Bascheck, 2005].
•
•
•
•
W-Virginis Sterne
Zwergcepheiden sowie δ Scuti Sterne
Mira-Veränderliche
Weitere Typen: ZZ Ceti-Sterne; RV Tauri-Sterne; Halbregelmässige Veränderliche
2. Magnetische oder Spektrum-Veränderliche - Ap-Sterne und Metallliniensterne
Hierbei handelt es sich um Sterne im Bereich der Hauptsequenz, welche sich durch
Pekuliaritäten ihres Spektrums auszeichnen und nicht in die zweidimensionale MKKlassifikation6 passen. Veränderliche stellen meist die heissen Ap(Bp)7 -Sterne dar - auch
Spektrum-Veränderliche genannt - wobei die kühleren Metallliniensterne (Am-Sterne8 )
eher statisch erscheinen.
3. Kataklysmische Veränderliche - Novae und Zwergnovae
Kataklysmische Veränderliche - oft auch eruptive Veränderliche genannt - zeichnen sich
durch einen oder mehrmaligen, plötzlichen Anstieg ihrer Helligkeit aus. Zu dieser Gruppe gehören Novae mit Helligkeitsveränderungen von (7 − 20) mag innerhalb von wenigen
Tagen, Zwergnovae mit Änderungen im Bereich von (2 − 6) mag und novaeähnlichen
Veränderlichen. All diese Typen gehören zu engen, halbgetrennten Doppelsternsystemen
bei welchen ein Massetransfer von einem kühlen Hauptreihenstern zu einem massereicheren Weissen Zwerg stattfindet - deshalb auch der Name Kataklysmische9 Veränderliche.
Neben den oben aufgeführten Hauptgruppen, gibt es noch weitere Gruppen, wie zum Beispiel
6
Leuchtkraftklasse und Spektraltyp kann aus dem Spektrum eines Sterns bestimmt werden und legen eine
eindeutige Position im HRD fest.
7
Peculiar A(B) stars; zeichnen sich durch periodische Veränderung der Intensität in gewissen Spektrallinien
und Stärke sowie durch das Vorzeichen ihres Magnetfeldes aus.
8
Meist Mitglieder in Doppelsternsystemen, besitzen keine starken Magnetfelder.
9
Griechisch κατ ακλνσµóζ und bedeutet Überschwemmung.
9
1 Theoretische Grundlagen
Supernovae und Pulsare, Sonnenähnliche Veränderliche, Röntgendoppelsterne, Gammaburster
usw.10 [Unsöld and Bascheck, 2005].
1.2.2 RR-Lyrae Sterne
Wie in der Übersicht kurz angesprochen, gehören RR Lyrae Sterne zur Gruppe der Pulsierenden Veränderlichen. Sie sind in Kugelsternhaufen sowie unter Feldsternen im Halo, aber
auch im Bulge, beobachtbar und zeichnen sich des Weiteren dadurch aus, dass sie sich im
Herzsprung-Russel Diagramm auf dem Horizontalast befinden (siehe Abb. 1.7) [Trefzger,
2008]. Deren Spektraltyp liegt bei A, F und besitzen relativ zu unserer Sonne kleine Massen im Bereich von (0.5 − 0.6) M [Unsöld and Bascheck, 2005, Carney and Harris, 2001].
Abbildung 1.7: Abgebildet ist ein schematisches Farben-Helligkeits-Diagramm von Kugelsternhaufen. RR-Lyrae Sterne befinden sich dabei in der Lücke des Horizontalastes. [Scheffler and Elsässer, 1982].
RR-Lyrae Sterne weisen regelmässige Lichtwechsel auf, deren Periode zwischen 0.2 und 1.2
Tagen variieren können - Helligkeitsamplituden liegen im Bereich von ungefähr 1 mag [Unsöld
and Bascheck, 2005]. In diesem Zusammenhang werden die Veränderlichen in drei Gruppen11
aufgeteilt, welche sich durch ihre Lichtkurve und ihre Periode des Lichtwechsels unterscheiden
(siehe Abb. 1.8) [Sparke and Gallahger, 2007]:
1. RRab antisymmetrische Lichtkurve, längere Periode als diejenige von RRc ,
2. RRc sinusförmige Lichtkurve,
3. RRd können in beiden obigen Moden pulsieren.
Problematischer scheint jedoch die Bestimmung der absoluten Helligkeit MV zu sein: Unter
der Annahme, dass die Helligkeit des Horizontalastes eine Funktion des Helium- und Schwere
Elemente-Anteils (Y und Z) ist, und wenn Änderungen in Z linear mit Änderungen in Y
korreliert sind, dann würde man folgendes, theoretisches Modell erwarten:
10
Ausführlichere Diskussionen zu diesen und den oben genannten Gruppen findet man z.B. in [Unsöld and
Bascheck, 2005].
11
Spezielle Untergruppen werden nicht aufgeführt. Siehe dazu [Carney and Harris, 2001] oder [Sparke and
Gallahger, 2007].
10
1.3 Photometrie
MV (RR) = a[F e/H] + b
(1.1)
wobei a12 , und b13 durch Messungen bestimmt werden müssen - [F e/H] wird auch Metallizität
genannt. Es gibt nun mehrere Methoden, wie zum Beispiel diejenige von Baade-Wesselink14 ,
M31 Kugelsternhaufen usw., um diese Koeffizienten zu bestimmen [Carney and Harris, 2001].
Für die weiteren Betrachtungen und vor allem für die Distanzbestimmung in Kapitel 1.4.3
wird, wegen der guten Übereinstimmigkeit mit der Theorie, diejenige Methode von BaadeWesselink verwendet, mit welcher man auf folgenden Ausdruck für die absoluten, visuellen
Helligkeiten MV kommt:
MV (RR) = (0.16 ± 0.03)[F e/H] + (1.02 ± 0.03).
(1.2)
Abbildung 1.8: Der Unterschied zwischen RR-Lyrae-Typen (RRab und RRc ) ist hier gut erkennbar. Abgebildet sind einige RR-Lyrae Sterne des Kugelsternhaufens M3.
[Carney and Harris, 2001].
1.3 Photometrie
1.3.1 Differenzielle Photometrie
Um eine Helligkeitsbestimmung eines Sterns V1 mit Hilfe der Differenziellen Photometrie
durchführen zu können, muss mindestens ein Vergleichsstern C1 (nicht veränderlich) mit bekannter Helligkeit auf der gleichen CCD Aufnahme sein [AAVSO, 2008]. Ist diese Voraussetzung gegeben, so kann man wie folgt beschrieben, die gesuchte Helligkeit V1 des Sterns
bestimmen:
1. Man misst, z.B. mit dem Programm Maxim-DL mit Hilfe der Blenden-PhotometrieFunktion, die Helligkeit15 der beiden Sterne V1 und C1 auf der CCD-Aufnahme und
12
Bestimmt relatives Alter.
Auch zero point genannt - bestimmt absolutes Alter.
14
Siehe [Carney and Harris, 2001] für ausführliche Beschreibung der Methode.
15
Die Einstellung für die Umrechnung von Intensität auf Magnitude spielt hierbei für die Bestimmung der
13
11
1 Theoretische Grundlagen
bildet die Differenz D = C1,M essung − V1,M essung + δM essungen [mag]. δM essungen ist als
Fehler der Messungen zu verstehen16 .
2. Wären beide Helligkeiten C1,Katalog und V1,Katalog aus früheren Messungen schon bekannt, so würde auch gelten: D = C1,Katalog − V1,Katalog + δKatalog [mag]. δKatalog stellt
in diesem Zusammenhang den Katalogfehler dar.
3. Dieser Sachverhalt kann nun verwendet werden, um V1 zu bestimmen:
V1 = C1,Katalog − C1,M essung + V1,M essung + δ,
[mag]
(1.3)
wobei in δ die Katalog- und Messfehler zusammengefasst sind. Der grösste Vorteil der Differenziellen Photometrie gegenüber der All Sky Methode (siehe Kap. 1.3.2) ist, dass man die
Atmosphärischen Störungen und die Luftmassen nicht in die Rechnung mit ein zu beziehen
braucht. Grund: Diese Störungen sind für den Vergleichsstern C1 und den betrachteten Stern
V1 gleich17 - heben sich also somit auf! Verwendet man bei der Differentiellen Photometrie
Flatfield-korrigierte Aufnahmen (siehe Kap. 1.3.4), so können hierbei Genauigkeiten von bis
zu 0.015 mag, ansonsten 0.05 mag, erreicht werden [AAVSO, 2008].
Ausgleichungsverfahren für Bestimmung der gesuchten Helligkeit
Zur Bestimmung der gesuchten Helligkeit V1 kann alternativ zum soeben besprochenen Verfahren ein Ausgleichungsmodell der Art
Ci,Katalog = Ci,M essung + vi,M essung + C
[mag]
(1.4)
verwendet werden, wobei C eine additive Konstante und vi,M essung den Fehler der Messung
i darstellen. Sind nun Messungen von Vergleichssternen vorhanden, kann mit Hilfe der Ausgleichung der Wert C sowie dessen mittleren Fehler mc bestimmt werden18 . Sind die beiden
Werte bekannt, ist es via
V1 = V1,M essung + C ± mc
[mag]
(1.5)
möglich die gesuchte Helligkeit und dessen mittleren Fehler mc des betrachteten Sterns anzugeben. An dieser Stelle muss jedoch noch erwähnt werden, dass sich nicht jeder Katalogstern,
als Vergleichsstern für die Bestimmmung der gesuchten Konstanten C und mc eignet. Einerseits sollten Katalogsterne verwendet werden, deren Helligkeiten sehr präzise bestimmt
worden sind. Andererseits sollten sie ungefähr die gleich Helligkeit, wie die zu bestimmende
aufweisen da ansonsten ein nicht repräsentativer mittlerer Fehler mc an die gesuchten Helligkeiten angebracht wird. Weitere Informationen hierzu bei der Besprechung der erhaltenen
Resultate auf S.29.
Helligkeit keine Rolle und kann im Grunde genommen willkürlich gewählt werden. Oft verwendet man aber
Einstellungen, die dann der tatsächlichen Helligkeiten nahe sind.
16
Für eine ausführliche Diskussion zur Bestimmung des Messfehlers δM essung wird auf [Martin and KleemannBöker, 2004, Berry and Burnell, 2005] verwiesen.
17
Achtung: Dies trifft nur unter der Annahme zu, dass es sich um ein kleines, aufgenommenes Gesichtsfeld
handelt und nicht eines über mehrere Grade!
18
Eine detailliertere Herleitung des verwendeten Ausgleichunsmodells nach [Gurtner, 2007] ist im Anhang A
auf S.49 aufgeführt.
12
1.3 Photometrie
1.3.2 All Sky Photometrie
Befinden sich auf der CCD Aufnahme, auf der sich der Stern mit gesuchter Helligkeit befindet,
keine Vergleichssterne, so kann die so genannte All Sky Photometrie“ verwendet werden, um
”
die gesuchte Helligkeit zu bestimmen. Diese Methode ist, im Gegensatz zur Differenziellen
Photometrie, jedoch viel aufwendiger und komplexer und erfordert viel mehr Aufwand, da
alle gesuchten Parameter mit Hilfe von Ausgleichungsmodellen berechnet werden müssen. Um
diese Komplexität verdeutlichen zu können, hier zuerst einmal die der All Sky Photometrie
zu Grunde liegenden Transformationsgleichungen, die schlussendlich für die Bestimmung der
verschiedenen Helligkeiten verwendet werden müssen:
B − V = (b − v) · Tbv + Kbv · X + Zbv ,
V − R = (v − r) · Tvr + Kvr · X + Zvr ,
R − I = (r − i) · Tri + Kri · X + Zri ,
(1.6)
V − I = (v − i) · Tvi + Kvi · X + Zvi ,
nach [AAVSO, 2008]
V = v + (B − V ) · Tv + Kv · X + Zv ,
nach [Berry and Burnell, 2005]
X = sec(zd) − 0.0018167 · Del − 0.002875 · Del2 − 0.0008083 · Del3 ,
1
Del = sec(zd) − 1.0,
sec(zd) =
,
zd = Zenitdistanz
cos(zd)
(1.7)
wobei die Tj 19 Farbtransformationskoeffizienten, Kj die atmosphärischen Extinktionskoeffizienten20 , X die Luftmasse und Zj Nullpunktkorrekturen darstellen. Des Weiteren stellen
die klein geschriebenen Buchstaben, wie b,v usw., die instrumentellen21 und die gross geschriebenen Buchstaben die Standard-Magnituden dar [AAVSO, 2008]. Die instrumentellen
Magnituden b, v usw. lassen sich nach [Berry and Burnell, 2005] wie folgt berechnen
Cap − nap (Can /nan )
Instr.Mag. = −2.5 · log
tB
ADUStar
− 2.5 · log
,
tB
+Z
(1.8)
wobei Z eine additive, frei22 wählbare Konstante, Cap die Summe der Pixelwerte und nap die
Anzahl Pixel in der Blende um den Stern, Can die Summe der Pixelwerte und nan die Anzahl
Pixel in der Blende des Himmelshintergrunds, tB die Belichtungszeit darstellen.
Wären all diese Koeffizienten schon bekannt, resp. bestimmt worden, so könnte man die
19
Tj , Kj , Zj und später Qj stellen eine allg. Notation dar. Wird ein spezifischer Koeffizient diskutiert, so hat
dieser die gleiche Form wie in den Gleichungen (1.6).
20
Die Extinktion ist wellenlängenabhängig und ist für jede Bestimmung von Helligkeiten/Farbe zu berechnen.
21
Die Teleskope der Observatorien unterscheiden sich oft in Bauweise, verwendete Filter usw. und besitzen
somit verschiedene instrumentelle Magnituden. Um diesen Effekt zu korrigieren, müssen diese auf Standardmagnituden umgerechnet werden, um schlussendlich für verschiedenste Berechnungen brauchbare Helligkeitswerte zu erhalten.
22
In der Photometrie wird die additive Konstante Z meist so gewählt, dass die instrumentellen Magnituden
praktisch mit den Standardmagnituden übereinstimmen.
13
1 Theoretische Grundlagen
gemessenen, instrumentellen Magnituden unverzüglich auf Standardmagnituden umrechnen.
In den folgenden Abschnitten werden jedoch die Schritte für die Bestimmung von (B − V )
und V durchgeführt, da diese schlussendlich für die Distanzbestimmung von Nöten sind - die
anderen Farben sind analog berechenbar.
1. Bestimmung der Farbtransformationskoeffizienten Tj
Um die Tj bestimmen zu können, werden meist Gebilde von Sternen, wie z.B. M 67,
Landoltstandarfelder (siehe Kap. 1.3.3) usw., verwendet, welche so genannte Standardsterne23 oder sekundäre Standards beinhalten und einen gewissen Farbbereich abdecken.
Werden nun von diesen Sternen Aufnahmen in den benötigten Filtern angefertigt und
sind die Sterne so kompakt beisammen, dass man annehmen kann, dass sie sich bei der
gleichen Luftmasse befinden, so vereinfachen sich die Gleichungen zu
(B − V )Katalog = (b − v)M essung · Tbv + Qbv ,
VKatalog = vM essung + (B − V )Katalog · Tv + Qv .
(1.9)
Nach [Gurtner, 2007] stellen die Gleichungen in 1.9 auch gerade die Bedingungsgleichungen für die Ausgleichung24 dar:
(b − v)M essung · Tbv + Qbv − (B − V )Katalog = 0,
vM essung + (B − V )Katalog · Tv + Qv − VKatalog = 0.
(1.10)
wobei Extinktionsterme und Nullpunktkorrekturen in Qj zusammengefasst wurden. Von
Interesse sind bei dieser Ausgleichung schlussendlich nur die Farbkorrekturkoeffizienten
Tj und deren mittleren Fehler mTj - die Q-Terme werden automatisch vom Programm
mitberechnet.
Für die weitere Diskussion ist an dieser Stelle zu erwähnen, dass die Farbtransformationskoeffizienten über längere Zeit und unter der Voraussetzung, dass keine Modifikationen am System vorgenommen wurden, konstant bleiben. Die Koeffizienten können daher
im Gegensatz zu den Kj und Zj vor einer eigentlichen Messung bestimmt werden.
2. Bestimmung der Exktinktionskoeffizienten Kj und Nullpunktskorrekturen
Zj
Da nun die Farbtransformationskoeffizienten Tj im vorherigen Schritt bestimmt worden
sind, können die ursprünglichen, unveränderten Gleichungen in 1.6
(B − V )Katalog = (b − v)M essung · Tbv + Kbv · X + Zbv ,
VKatalog = vM essung · Tv + Kv · X + Zv ,
23
(1.11)
Standardsterne dienen unter anderem der Systemkalibrierung da deren Helligkeiten sehr genau bestimmt
worden sind.
24
Da die gesamte Herleitung der Ausgleichungsmodelle zu umfangreich ist, werden des Weiteren nur die Bedingungsgleichungen aufgeschrieben. Die gesamte Theorie findet man in [Gurtner, 2007]; Programmcode
auf der beiliegenden DVD in den betreffenden Ordnern vorhanden.
14
1.3 Photometrie
verwendet werden, um die Extinktionskoeffizienten Kj sowie die Nullpunktskorrekturen Zj für die jeweiligen Umrechnungen auf Standardmagnituden zu berechnen. Die
Beobachtungsgleichungen für die Ausgleichungen haben daher die Form
(b − v)M essung · Tbv + Kbv · X + Zbv − (B − V )Katalog ,
vM essung · Tv + Kr · X + Zv − VKatalog .
(1.12)
Im Gegensatz zum vorherigen Schritt, bei dem die Tj mit Hilfe von Standardfeldern in
einer bestimmten Höhe, resp. ein und derselben Luftmasse bestimmt wurden, müssen
hier Sterne mit unterschiedlichen Farben und mit genau bestimmten Helligkeiten in
verschiedenen Höhen beobachtet werden, um die gesuchten Koeffizienten bestimmen zu
können. Wird die Ausgleichung mit den Messdaten ausgeführt, so erhält man die gesuchten Koeffizienten Kj , Zj mit ihren zugehörigen mittleren Fehlern mKj ;Zj 25 [AAVSO,
2008].
Wurden die Schritte 1, 2 erfolgreich durchgeführt, resp. sind alle Koeffizienten bekannt, so ist
man nun in der Lage die instrumentellen Magnituden auf Standardmagnituden umzurechnen.
Die erhaltenen Werte können dann für weitere Berechnungen, wie z.B. für die Distanzbestimmung, weiter verwendet werden.
1.3.3 Landold Standardsterne
Die Umstände, dass die Standardsterne, welche dem von Johnson und Morgan um 1953 entwickelte photometrische UBV System zu Grunde liegen, oft für die damaligen, verwendeten
Photometer der Observatorien zu hell und nur von Astronomen auf der nördliche Hemisphäre
zugänglich waren, führten Arlo U. Landolt dazu ein Set von Standardsternen zusammen zustellen, welches
1. homogen und in sich konsistent,
2. präzis vermessen,
3. und Astronomen auf beiden Hemisphären die Möglichkeit bot, dieses für Kalibrierungen
von Intensität und Farben zu verwenden.
Eine erste solche Zusammenstellung wurde 1973 im The Astronomical Journal“ mit dem Titel
”
UBV photoelectric sequences in the celestial equatorial selected areas 92-115“ veröffentlicht.
”
642 neue Standardsterne, verteilt auf 24 Selectes Areas“, im Johnson UBV-System im Bereich
”
von 10.5 . V . 12.5 Magnituden und ±1◦ um den Himmelsäquator angesiedelt, waren ab
dann für Astronomen, resp. ein Subset davon, auf beiden Hemisphären stets verfügbar!
Landolt verfolgte diese Arbeit weiter und begann ein dreiteiliges Projekt mit dem Ziel immer
schwächere Standardsterne für Kalibrierungen bereit zu stellen. Hier ein kurze Übersicht dieser
Werke:
• 1. Teil um 1983: 223 Standardsterne im Johnson-Kron-Cousins UBVRI-System, ±1◦
um Himmelsäquator angesiedelt und die meisten davon in Selected Areas 92 − 115,
Helligkeiten im Bereich von 7 . V . 12.5 Magnituden und Farben von −0.3 . (B−V ) .
+2.0 [Landolt, 1973].
25
Programmcode auf der beiliegenden DVD vorhanden.
15
1 Theoretische Grundlagen
Abbildung 1.9: Abbgebildet ist ein Ausschnitt der Selected Area SA101. [Landolt, 1992].
• 2. Teil um 1992: 526 Standardsterne im Johnson-Kron-Cousins UBVRI-System; zentriert
um Himmelsäquator; Helligkeiten im Bereich von 11.5 . V . 16.0 Magnituden und
Farben von −0.3 . (B − V ) . +2.3 [Landolt, 1983].
• 3. Teil: Nach [Landolt, 1992] noch ausstehend. Es handelt sich hierbei um Standardsterne
in einem noch nicht definitiven Helligkeitsbereich von 14.5 < V < 21.0 Magnituden
[Landolt, 1992].
1.3.4 Korrekturaufnahmen
Oft ist es notwendig, Rohaufnahmen von Fehlern, verursacht durch Optik usw., vor eigentlichen Messungen zu kalibrieren. Im Folgenden werden die Kalibrieraufnahmen Bias, Dark und
Flatfield vorgestellt und erläutert mit welchen Aufnahmen welche Effekte behoben werden.
Für eine ausführliche Diskussion wird auf [Martin and Kleemann-Böker, 2004] und [Berry and
Burnell, 2005] verwiesen.
Bias
Ein Biasbild stellt eine Aufnahme dar, welche mit kürzester Belichtungszeit und gegen Licht
abgeschirmten Chip aufgenommen wurde (siehe Abb. 1.10).
Bei einer solchen Aufnahme würde man eigentlich als Pixelwerte lauter Nullen erwarten (da
kein Lichteinfall und kürzeste Belichtungszeit!). Da jedoch jeder Ausleseverstäker eines CCDChips ein Ausleserauschen verursacht, welches sich in einer zufälligen Streuung der Pixelwerte
um die tatsächlichen Werte bemerkbar macht und so auch neg. Werte entstehen können, wird
vom Chiphersteller ein konstanter Wert, die sogenannte Vorspannung oder auch Bias genannt,
jedem Pixel hinzu addiert. Diese Vorspannung kann nun mit einer solchen Aufnahme ermittelt
und dem Rohbild abgezogen werden [Martin and Kleemann-Böker, 2004].
Dark
Wie beim Biasbild handelt es sich beim Dunkelbild (siehe Abb. 1.11) - auch Dark genannt um eine Aufnahme mit abgedeckten, gegen Lichteinfall geschützten Chip, bei der jedoch die
16
1.3 Photometrie
Abbildung 1.10: Bias Aufnahme mit CCD-Chip (CCD42-40 NIMO Back Illuminated von e2V)
des ZIMLAT Teleskops in Zimmerwald; Aufnahmezeit: 0.1 s; Aufnahmedatum: 05.05.2008; Chiptemperatur: - 35.47◦ C. Auffallend sind die beiden unterschiedlich belichteten“ Hälften und die beiden hellen, vertikalen Striche
”
auf der rechten Seite des Chips. Ersteres hat damit zu tun, dass der Chip
auf zwei Seiten Signale ausliest und somit zwei Ausleseverstäker, resp. zwei
Vorspannungen besitzt und letzteres mit defekten Pixels (hier: so genannte
Hot Pixels). [Andreas Riedo, 2008].
Belichtungszeit26 sowie Chiptemeperatur27 mit den Werten des zu korrigierenden Rohbildes
übereinstimmen. Da nun die Belichtungszeit beim Dark nicht die kürzest mögliche ist, besteht eine solche Aufnahme im Grunde genommen aus zwei Teilbildern: dem Bias- und dem
Wärmebild (Thermal-Frame). Letzteres entsteht dadurch, dass Elektronen e− allein durch
ihre thermischen Energien im Silizium des CCD Chips freigesetzt werden können und sich,
wie herkömmliche“, durch Licht freigesetzte Elektronen e− , in den Pixels ansammeln. Die”
ses Signal wird auch Dunkelstrom genannt und nimmt bei gegebener Belichtungszeit mit
ansteigender Chiptemperatur zu. Falls nun die Dark-Aufnahme die gleiche Belichtungszeit,
wie diejenige des Rohbildes aufweist, so kann dieser Effekt korrigiert werden, indem man das
Dark vom Rohbild subtrahiert28 . Ist dies nicht der Fall, so muss das Dark zuerst Bias korrigiert und anschliessend auf die korrekte Belichtungszeit skaliert werden, bevor es vom Rohbild
subtrahiert wird [Martin and Kleemann-Böker, 2004].
Flatfield
Flatfield Aufnahmen werden benötigt, um eine Kalibrierung der relativen Empfindlichkeit der
Pixel des Aufnahmesystems zu realisieren. Solche unterschiedliche Empfindlichkeiten werden
z.B. durch die Aufnahmeoptik - Vignettierung - oder Artefakte, verursacht durch Staubkörner
auf optischen Flächen in der Nähe des CCD Chips oder gar auf dem Chip selbst usw. hervor26
Ein Dark kann auch rechnerisch bestimmt werden, falls Belichtungszeit nicht mit derjenigen des Rohbildes
übereinstimmt. Dabei wird das Dark zuerst Bias korrigiert und dann auf die gewünschte Belichtungszeit
skaliert. Damit das erstelle Dark für die Belichtungszeit des Rohbildes repräsentativ ist, sollte aus rein
statistischen Gründen beachtet werden, dass die Belichtungszeit des Rohdarks höher sein sollte, als diejenige
des Rohbildes.
27
Nach [Martin and Kleemann-Böker, 2004] sollten sich die Temperaturen von Roh- und Darkaufnahme nicht
mehr als ungefähr ±2◦ C unterscheiden.
28
Unter dieser Annahme wird sogleich auch die Biaskorrektur vorgenommen.
17
1 Theoretische Grundlagen
Abbildung 1.11: Abgebildet ist eine Darkaufnahme mit CCD-Chip (CCD42-40 NIMO Back Illuminated von e2V) des ZIMLAT Teleskops in Zimmerwald; Belichtungszeit:
192 s; Aufnahmedatum: 06.05.08; Chiptemperatur: -35.79◦ C. Einerseits sind
wieder die zwei Vorspannungen sowie die Hot Pixels und andererseits die je
4 Sektoren auf jeder Seite sichtbar. Letzteres hat mit dem Herstellungsprozess des Chips zu tun und nicht, wie man meinen könnte, mit zusätzlichen
Vorspannungen. [Andreas Riedo, 2008].
gerufen. Dabei handelt es sich um Aufnahmen, bei denen einerseits der CCD Chip möglichst
homogen29 beleuchtet werden muss und andererseits die durchschnittliche Intensität der Pixel
so hoch wie möglich30 sein sollte. Es ist jedoch zu beachten, dass der lineare Empfindlichkeitsbereich der Kameras dabei nicht überschritten werden darf! Sollte dies geschehen, so sind
die Aufnahmen unbrauchbar, da diese dann zu einer Intensitätsverfälschung des Rohbildes
führen. Wurden die Aufnahmen erfolgreich erstellt, so muss man wie folgt vorgehen, um die
Korrekturen beim Rohbild vornehmen zu können:
1. Rohbild muss zuerst mit Bias und passendem Dark korrigiert werden,
2. Flat muss vor Anwendung am Rohbild mit Bias und passendem Dark korrigiert und
normiert werden,
3. Um die Flatkorrektur nun vornehmen zu können, wird das Rohbild durch das Flat
dividiert und NICHT subtrahiert, wie dies bei der Bias- und Darkkorrekur der Fall ist,
4. Rohbild ist nun vollständig korrigiert und kann für weitere Messungen verwendet werden.
Da nun Verschmutzungen bei verschiedenen Wellenlängen sich unterschiedlich auf die Rohdaten auswirken und auch die Optik und der CCD Chip31 zu dieser Wellenlängenabhängigkeit
führen, müssen Flatbilder für jeden bei den Rohdaten verwendeten Filter hergestellt werden
(siehe Abb. 1.3.4). Deutlich wird nun auch, dass die Apparatur, bei der die Rohbilder und
29
Es gibt mehrere Möglichkeiten Flats aufzunehmen: Lichtboxflats, Kuppelflats, Dämmerungsflats und Himmelflats. Die einzelnen Techniken sind in [Martin and Kleemann-Böker, 2004] ausführlich diskutiert und
werden hier nicht näher erläutert.
30
Bei non ABG - Antiblooming-Gate - Kameras eine mittlere Intensität von 60% - 80% und bei AGB Kameras
eine mittlere Intensität von 40% - 60% der maximal möglichen Graustufen.
31
Es kann vorkommen, dass zwei Pixel des CCD in einer Wellenlänge die gleiche Intensität aufweisen jedoch
in einer anderen wiederum nicht!
18
1.4 Modelle der Distanzbestimmung
(a) B-Filter, Belichtungszeit: 0.1 s.
(b) V-Filter, Belichtungszeit: 0.1 s.
(c) R-Filter, Belichtungszeit: 0.2 s.
(d) I-Filter, Belichtungszeit: 0.5 s.
Abbildung 1.12: Abgebildet sind Dämmerungs-Flats mit ZIMLAT in den Filtern B,V,R,I.
Aufnahmedatum: 05.05.2008. Sehr gut zu erkennen sind die Vignettierungen
sowie die besprochene Wellenlängenabhängigkeit in den einzelnen Filtern Vergleiche dazu B- und I-Filter miteinander! [Andreas Riedo, 2008].
die Flats aufgenommen wurden, identisch sein muss, um obigen Effekten Rechnung tragen zu
können [Martin and Kleemann-Böker, 2004].
1.4 Modelle der Distanzbestimmung
Im Folgenden werden vier verschiedene Modelle vorgestellt, welche für eine Distanzbestimmung zu Himmelsobjekten herangezogen werden können. Hierbei werden im ersten Teil zwei
Methoden vorgestellt, welche in den Anfängen der Distanzbestimmung entwickelt wurden und
sich für kürzere Distanzen eignen. Im zweiten Teil werden dann diejenigen zwei Modelle vorgestellt, mit denen in dieser Arbeit die Distanzen zu M3 und M44 berechnet werden - dem
Main-Sequence Fitting und dem Verfahren mit Hilfe von Veränderlichen Sternen.
19
1 Theoretische Grundlagen
1.4.1 Trigonometrische Parallaxen
Durch die jährliche Bewegung der Erde um die Sonne ist bei den zu uns näheren Sterne
gegenüber der Himmelskugel - weit entfernte Sterne - eine scheinbare, elliptische Bahn zu
beobachten (siehe Abb. 1.13). Der Winkel unter dem der Erdbahnradius (1 AE32 ) vom betrachteten Stern her gesehen wird, wird jährliche oder auch heliozentrische Parallaxe genannt.
Ist diese Parallaxe p bekannt, so hat man mit dem folgendem Ausdruck die Möglichkeit die
Distanz d zu dem betrachteten Stern zu bestimmen
d=
1
p
[pc],
(1.13)
wobei die Parallaxe p in Bogensekunden anzugeben ist. Einer Parallaxe von p = 100 entspricht
die Entfernung d = 360·60·60
= 2060 264.8 AE - auch 1 Parsec33 genannt [Unsöld and Bascheck,
2·π
2005].
Abbildung 1.13: Trigonometrische Parallaxe p. [Unsöld and Bascheck, 2005, Sparke and Gallahger, 2007].
Historisch gesehen, konnte man die Parallaxenbestimmung zu Sternen erst mit der Erfindung
des Heliometers durch Joseph von Fraunhofer (1787 - 1826) durchführen, da die zu messenden Winkeln mit den damaligen, technischen Hilfsmitteln nicht genügend aufgelösst werden
konnten. Die folgende Tabelle zeigt die zu uns nächsten Sterne mit ihren Parallaxen:
Tabelle 1.1: Parallaxen der nächsten Sterne (stand 2006) aus [Schildknecht, 2007]
Sternenname
p [”]
Distanz [pc]
Proxima Centauri
Alpha Centauri A
Alpha Centauri B
Barnard’s Star
Wolf 359
0.77
0.75
0.75
0.55
0.42
1.30
1.34
1.34
1.83
2.39
Die erste Messung von Sternparallaxen wurden F.W.Bessel zugeschrieben [Schildknecht, 2007],
32
33
1 AE = 1.496 · 1011 m; Abkürzung für Astronomische Einheit - englisch astronomical unit AU.
Hergeleitet aus Parallaxe und Sekunde; Kurzform 1 pc.
20
1.4 Modelle der Distanzbestimmung
wobei in diesem Sinne auch die Persönlichkeiten T.Henderson und F.G.W Struve zu erwähnen
sind.
Eine grundlegende Verbesserung der Messgenauigkeit von ±0.0100 folgte um 1903, als F. Schlesinger die erste photographische Messung von trigonometrischer Parallaxen gelang. Eine weitere Steigerung der Messgenauigkeit auf rund ±0.00100 für hellere und ±0.00300 für schwächere
Sterne wurde durch den 1989 gestarteten europäischen Astrometriesateliten HIPPARCOS 34
erreicht.
Schlussendlich ist aber zu erwähnen, dass die Distanzbestimmung mit Hilfe der Parallaxenmessung wegen den Messgenauigkeiten nur für Distanzen von (500 − 1000) pc geeignet ist.
Etwas weitere Distanzen können mit Hilfe von Stromparallaxen bzw. Haufenparallaxen für
Gruppen von Sternen erreicht werden (siehe folgendes Kapitel 1.4.2) [Unsöld and Bascheck,
2005].
1.4.2 Stromparallaxen
Die Distanzbestimmung mit Hilfe der Stromparallaxe bzw. Haufenparallaxe ist auf eine Entdeckung von L. Boss zurückzuführen. Um 1908 beobachtete er eine Gruppe von Sternen,
angesiedelt um den Hyadenhaufen, deren Eigenbewegungsvektoren an der Sphäre gegen einen
Konvergenzpunkt hinzielen (siehe Abb. 1.14).
Abbildung 1.14: Distanzbestimmung mit Hilfe der Stromparallaxe bzw. Haufenparallaxe.
[Unsöld and Bascheck, 2005].
Dieses Verhalten kann nun verwendet werden, um eine Distanzbestimmung zu einem Stern des
Haufens vorzunehmen. Sind die Werte für die Haufengeschwindigkeit vH 35 , die Eigenbewegung
µ36 , die Radialgeschwindigkeit Vr 37 sowie der Zwischenwinkel ϑ für einen Haufenstern bekannt,
so kann man folgenden Ausdruck
p[00 ] =
4.74 · µ[00 a−1 ]
Vr [km s−1 ] · tan(ϑ)
(1.14)
verwenden, um dessen Distanz mit Hilfe der Gleichung 1.13 zu bestimmen.
34
High P recision Par allax Collecting S atellite.
Geschwindigkeit relativ zur Sonne.
36
Von E. Halley (1718) entdeckt; erhält man aus dem Vergleich von zwei Aufnahmen (Messung bezogen auf
entfernte Sterne mit kleiner Eigenbewegung), welche einen zeitlichen Abstand von 10-50 Jahren haben.
37
Geschwindigkeit relativ zur Sonne; erhält man aus spektroskopischen Messungen via Dopplereffekt: Vr =
c · ∆λ
.
λ0
35
21
1 Theoretische Grundlagen
1.4.3 RR Lyrae
Um eine Distanzbestimmung mit Hilfe von RR-Lyare Sternen durchführen zu können, müssen
zuerst einige theoretische Modelle näher diskutiert werden. Sind diese und die Herleitung des
Distanzmoduls
m − M = 5 log10 (d) − 5 + A
(1.15)
verstanden, kann die Gl.(1.15) in Verbindung mit Messungen umgehend für eine Distanzbestimmung herangezogen werden.
Der Fluss F eines Sterns, resp. die totale empfangene Energie pro Sekunde und Quadratmeter [Wm−2 ], ist definiert durch
F =
L
,
4πd2
(1.16)
wobei L die Leuchtkraft des Sterns, resp. die Energie, die pro Sekunde radial ausgestrahlt
wird, und d die Distanz in [pc] zum betrachteten Stern darstellen. Betrachtet man nun zwei
Sterne mit ihren jeweiligen Strahlungsflüssen F1 und F2 , so sind diese mit
m1 − m2 = −2.5 log10
F1
F2
(1.17)
miteinander korreliert. Dabei sind m1 und m2 die gemessenen scheinbaren Magnituden der
beiden betrachteten Sterne. Mit der Definition 1.16 erhält man weiter
m1 − m2 = −2.5 log10
L1
4πd21
L2
4πd22
.
(1.18)
Um den hergeleiteten Ausdruck auf die gesuchte Form der Gl.(1.15) zu bringen, muss zuerst die
Definition der absoluten Magnitude M eines Sterns gegeben werden. Es handelt sich hierbei
um die scheinbare Helligkeit m des Sterns, welche in einer Distanz von 10 pc beobachtet werden
würde, resp.
F =
L
.
4π102
(1.19)
Betrachtet man nun einen einzelnen Stern mit seinen 2 scheinbaren Helligkeiten - eine in der
gesuchten Distanz d und eine in 10 pc - so kommt man auf folgenden Ausdruck
m − M = −2.5 log10
L
4πd2
L
4π102
!
= −2.5 log10
10
d
2
= −5 log10
10
d
(1.20)
welcher auch Distanzmodul genannt wird [Sparke and Gallahger, 2007, Unsöld and Bascheck,
2005]. Sind nun die Werte für die scheinbare und absolute Helligkeit m und M eines Sterns
bekannt und löst man das Distanzmodul nach der Distanz d auf, so erhält man direkt die
Entfernung zum betrachteten Stern. Bevor der Ausdruck jedoch nach der Distanz d aufgelösst wird, muss ein wichtiger Störfaktor“ miteinbezogen werden, welcher in den Anfängen
”
der Verwendung des Moduls nicht berücksichtigt worden ist - die interstellare Extinktion A.
22
1.4 Modelle der Distanzbestimmung
Die interstellare Extinktion, hervorgerufen durch interstellaren Staub, verursacht eine Abschwächung des Lichts, was zu einer Überschätzung der Distanz führt. Um diesen Effekt bei
der Distanzbestimmung zu berücksichtigen, muss das Distanzmodul zu
m − M = 5 log10 (d) − 5 + A
(1.21)
modifiziert werden. Mit der angebrachten Korrektur kann nun Gl. 1.15 nach d aufgelösst
werden und erhält somit eine Gleichung mit der die Distanz in [pc] zum betrachteten Objekt
berechnet werden kann:
d = 100.2(m−M −A)+1 .
(1.22)
Des Weiteren ist zu berücksichtigen, dass Gl. 1.15 in verschiedenen Filtern, d.h. im visuellen,
blauen usw., verwendet werden kann. Dabei ist jedoch zu beachten - da die Extinktion A wellenlängenabhängig ist - dass alle gemessenen Terme im selben Wellenlängenbereich einzufügen
und nicht zu vermischen sind [Unsöld and Bascheck, 2005, Trefzger, 2008].
Anwendung auf RR-Lyrae Veränderliche
Um schlussendlich eine Distanzbestimmung mit Hilfe von RR-Lyrae durchführen zu können,
müssen folgende Werte/Angaben bekannt sein:
1. Messungen, um die mittlere38 , scheinbare Helligkeit mV zu bestimmen,
2. Angabe der Metallizität [F e/H]39 des betrachteten Objekts für die Bestimmung der
absoluten, visuellen Helligkeit MV (siehe Gl. 1.2),
3. Angabe der interstellaren Extinktion im visuellen AV 40 .
Sind all diese Werte/Angaben bekannt, so können diese in Gl. 1.22
d = 100.2(mV −MV −AV )+1
(1.23)
eingesetzt werden, um die gesuchte Distanz berechnen zu können.
An dieser Stelle ist zusätzlich zu erwähnen, dass die erhaltene Gleichung auch für andere
Objekte verwendet werden kann und nicht nur den RR-Lyrae Sternen vorbehalten ist. Denn
sind die Werte für mV , MV und AV für ein Objekt bekannt, so können diese in die Gleichung
eingesetzt werden, um eine Distanzbestimmung durchführen zu können.
1.4.4 Main Sequence Fitting - Hauptreihenanpassung
Im Gegensatz zum Distanzverfahren in Verwendung von RR-Lyrae Sternen, handelt es sich
beim Main Sequence Fitting - auch Hauptreihenanpassung genannt - um eine relative Entfernungsmessmethode zwischen zwei Sternhaufen, von denen bei einem die Distanz durch andere
Messungen schon bekannt ist. Dabei vergleicht man deren Hauptreihen in einem FarbenHelligkeits Diagramm F HD (siehe Abb. 1.16) und bringt sie durch vertikales Verschieben zur
38
Da es sich um einen Veränderlichen handelt, muss der Mittelwert über einer Periode genommen werden.
Kann z.B. durch spektroskopische Messungen ermittelt werden.
40
Kann durch spektralphotometrische Messungen berechnet werden; nach [Unsöld and Bascheck, 2005] kann
AV durch AV = (3.1 ± 0.1)EB−V bestimmt werden, wobei EB−V den Farbexzess darstellt.
39
23
1 Theoretische Grundlagen
Überdeckung. Mit der vertikalen Differenz ∆M ist es nun möglich die gesuchte Distanz d2
in Abhängigkeit der schon bekannten d1 zu bestimmen [Trefzger, 2008]. Hier eine Herleitung
dessen, was soeben besprochen wurde:
Man betrachte zwei Hauptreihen im FHD und unterteile den Farbindex41 in n Teilstücke
(siehe Abb. (1.15)).
Abbildung 1.15: Schematische Darstellung eines Main Sequence Fittings im FHD. [Andreas
Riedo, 2008].
In jedem Farbindexintervall i wird nun die vertikale Distanz ∆Mi zwischen den beiden Hauptreihen gemessen. Mit den Distanzmodulen der beiden Sternhaufen im Intervall i (siehe Gl.1.15)
m1,i − M1,i = 5 log10 (d1,i ) − 5 + A1 ,
(1.24)
m2,i − M2,i = 5 log10 (d2,i ) − 5 + A2 ,
wobei mit dem Index 1 der Sternhaufen bezeichnet wird, bei dem die Distanz d1,i = d1 schon
bestimmt wurde und 2 bei dem sie noch zu bestimmen ist, lässt sich nun die Distanz d2,i
bestimmen, indem man deren Differenz via
d1
(m1,i − M1,i ) − (m2,i − M2,i ) = 5 log10
+ A1 − A2
(1.25)
| {z }
d2,i
|
{z
}
∆Mi
∆A
bildet und nach der gesuchten Distanz d2,i auflösst
d2,i = d1 · 100.2(∆Mi −∆A) .
41
(1.26)
Die Differenz zwischen zwei scheinbaren Helligkeiten in unterschiedlichen Wellenlängen, resp. mx − my wobei
x, y z.B. B, V sein könnten.
24
1.4 Modelle der Distanzbestimmung
Wird die Distanz d2,i für jeden Farbindexintervall i bestimmt, kann schlussendlich eine mittlere Angabe über die gesuchte Distanz d2 des betrachteten Sternhaufens angegeben werden.
An dieser Stelle sollte vollständigkeitshalber erwähnt werden, dass beschriebenes Verfahren
der Distanzbestimmung nicht nur bei Sternhaufen angewandt werden kann. Es würde z.B.
auch funktionieren, wenn man die vertikale Verschiebung ∆M zweier Sterne - bei einem ist
die Distanz unbekannt - mit dem gleichen Farbindex im FHD bestimmen würde.
Referenzhaufen für Main Sequence Fitting
Als Referenzhaufen wird meistens der Hyadenhaufen verwendet, da dessen Distanz besonders genau mit Hilfe von trigonometrischen (siehe Kapitel 1.4.1) und Sternstromparallaxen
(siehe Kapitel 1.4.2) gemessen wurde. Hier ein aktueller Wert für die mittlere Entfernung des
Hyadenhaufens [Trefzger, 2008]:
DHyaden = (46.3 ± 0.3) pc.
(1.27)
Abbildung 1.16: Farben-Helligkeits-Diagramme offener Sternhaufen. Aufgetragen sind die korrigierten Werte für MV,0 und Farbindizes (B − V )0 . [Unsöld and Bascheck,
2005].
25
2 Experiment
2.1 Apparatur und Software
CCD Aufnahmen
Alle CCD Aufnahmen, welche den folgenden Resultaten zu Grunde liegen, wurden mit der
CCD Kamera in Verbindung mit dem ZIMLAT Teleskop in Zimmerwald der Universität
Bern aufgenommen. Der dabei verwendete CCD Chip ist vom Typ CCD42-40 NIMO Back
Illuminated und ist von e2V technolegies angefertigt. Sämtliche Rohaufnahmen sowie Korrekturaufnahmen sind auf der beiliegenden DVD vorhanden.
Software
Sämtliche Sternhelligkeiten wurden - wenn Nichts anderes erwähnt - mit dem PhotometrieTool des Programms MaxIm DL gemessen. Die erhaltenen Helligkeiten wurden anschliessend mit selbstgeschriebenen Prozeduren in Matlab Version 2007a weiterverarbeitet. Alle
Programmcodes sind auf der beiliegenden DVD in den entsprechenden Ordnern verfügbar
und können dort direkt mit Matlab ausgeführt oder betrachtet werden.
2.2 Fehlerrechnung
Die im Folgenden berechneten und angegebenen mittleren Fehler der Resultate, wurden wenn Nichts anderes erwähnt - mit Hilfe der Fehlerfortpflanzung nach Gauss berechnet. Dazu
wurde folgende, allgemeine Form verwendet
s2f¯ = s2f (x̄) + s2f (ȳ) + . . . ≡
∂f
∂x
2
s2x̄ +
∂f
∂y
2
s2ȳ + . . .
(2.1)
wobei die partiellen Ableitungen an den Stellen x̄, ȳ usw. berechnet wurden.
2.3 Resultate und Diskussion
2.3.1 Distanzbestimmung zum Kugelsternhaufen M3
Da Messier 3 - kurz M3 - viele RR-Lyrae Sterne besitzt, eignet sich dieses Objekt für die
Anwendung der Methode der Distanzbestimmung in Verwendung von RR-Lyrae Sternen
vorzüglich [Cacciari et al., 2005]. Nachfolgend werden nochmals die Gleichungen aufgeführt,
die für die Bestimmung der Distanz herangezogen werden:
MV (RR) = (0.16 ± 0.03)[F e/H] + (1.02 ± 0.03) [mag];
d = 100.2(mV −MV −AV )+1 [pc];
26
siehe Kap. 1.2.2, Gl. 1.2
siehe Kap. 1.4.3, Gl. 1.23
(2.2)
2.3 Resultate und Diskussion
wobei die visuellen Helligkeiten mV mit der Methode der Differenziellen Photometrie (siehe
Kap. 1.3.1) gemessen wurden. Für die Berechnung der absoluten, visuellen Helligkeit MV wird
nach [Cacciari et al., 2005]
[F e/H] = (−1.50 ± 0.03)
(2.3)
als Wert für die Metallizität verwendet. Damit erhält man für MV den Wert
MV (RR) = (0.78 ± 0.05) [mag].
(2.4)
Die interstellare Extinktion im Visuellen AV kann, wie in Kap. 1.4.3 kurz angesprochen, mit
Hilfe des Farbexzesses E(B−V ) und folgendem Ausdruck
AV = (3.1 ± 0.1) · E(B−V )
(2.5)
nach [Unsöld and Bascheck, 2005] berechnet werden, wobei als Wert für den Farbexzess E(B−V )
nach [Cacciari et al., 2005]
E(B−V ) = (0.01 ± 0.01) mag
(2.6)
verwendet wird. Damit erhält man für die interstellare Extinktion im Visuellen AV
AV = (0.03 ± 0.03) mag.
(2.7)
Bevor die erhaltenen Werte für die visuellen Helligkeiten mV angegeben werden, sollten im
Vorfeld noch einige Bemerkungen zum ausgewerteten Aufnahmematerial, Auswertungsverfahren usw. angegeben werden.
Verwendete Aufnahmen
Die mit Differenzieller Photometrie gemessenen visuellen Helligkeiten mV wurden einer CCD
Aufnahme mit Datum 21.06.2008 und Belichtungszeit von 120 s entnommen. Um die Schwächen
und Stärken der angewandten Messmethode aufzuzeigen, wurde des Weiteren einerseits die
unkorrigierte und andererseits die kalibrierte Aufnahme verwendet - folglich werden später
zwei verschiedene Messwerte für mV , resp. zwei Distanzen diskutiert werden. Für die Kalibrierung der Aufnahme wurden ein Masterbias, zwei Masterdarks (810 ms und 120 s) und ein
Masterflat verwendet, die je mit einer Median-Mittelung aus 10 Aufnahmen des 21.06.2008
hergestellt wurden.
RR-Lyrae Sterne, Vergleichssterne und angewandte Berechnung von mV
Da die Messung über die Helligkeitsperioden der RR-Lyrae Sterne nicht vollständig durchgeführt werden konnte und es folglich nicht möglich war, die einzelnen mittleren, visuellen
Helligkeiten mV,i der einzelnen RR-Lyrae Sterne zu bestimmen, um schlussendlich via einer
Mittelung über alle mV,i eine mittlere Helligkeit mV zu erhalten, wurde eine Berechnung unter
folgender Annahme gemacht:
Misst man Helligkeiten von RR-Lyrae Sternen, welche sich in einer dem Beobachter unbekannten Phase der jeweiligen Perioden befinden1 , so sollte sich der Mittelwert über all diese
1
Siehe dazu Messungen in [Cacciari et al., 2005].
27
2 Experiment
Messungen mit steigender Anzahl von vermessenen RR-Lyrae Sternen, dem gesuchten Mittelwert nähern.
Des Weiteren musste die Arbeit von [Cacciari et al., 2005] - Messung von 133 RR-Lyrae
Sternen - für eine eindeutige Identifikation der RR-Lyrae Sternen und deren Typus herangezogen werden, um Nicht-Veränderliche von Veränderlichen unterscheiden zu können.
Den Resultaten liegen letztendlich 25 Vergleichssterne2 - Katalogdaten aus [Buonanno et al.,
1994] - und 22 RR-Lyrae Sterne zu Grunde, von denen nach [Cacciari et al., 2005] 12 RRab ,
4 RRc und 6 RR-Lyrae Sterne mit Blazhko-Effekt 3 sind. Da sich nun nach [Cacciari et al.,
2005] die einzelnen mittleren Helligkeiten der oben erwähnten Typen, für RRab < V >=
(15.64 ± 0.04) mag, RRc < V >= (15.59 ± 0.02) mag und für die Sterne mit Blazhko Effekt
< V >= (15.65 ± 0.05) mag, voneinander unterscheiden, wurde die mittlere Helligkeit der
RRab Typen als Referenz für die mittlere, visuelle Helligkeit der RR-Lyrae Sterne verwendet,
resp. die RRc und Blazhko Typen wurden in der Berechnung um +0.05 mag und −0.01 mag
korrigiert4 . Nach dieser Korrektur wurden anschliessend alle Werte zusammen addiert und
durch die Anzahl RR-Lyrae Sterne dividiert, um den gesuchten Wert für die mittlere, visuelle
Helligkeit mV für die Berechnung der Distanz d berechnen zu können.
Mit den oben besprochenen Annahmen und Korrekturen können nun die beiden - folgend
aus unkorrigierter und korrigierter Aufnahme - gesuchten, visuellen Helligkeiten mv,unkorr
und mv,korr berechnet, resp. hier angegeben werden:
< mv,unkorr > = (15.719 ± 0.001) mag,
< mv,korr > = (15.696 ± 0.001) mag.
(2.8)
Mit diesen und den besprochenen Werten für Metallizität usw., können sogleich auch die
gesuchten Distanzen dunkorr und dkorr nach Gl. 2.2 angegeben werden:
dunkorr = (9588 ± 255) pc;
dkorr = (9487 ± 255) pc.
(2.9)
An dieser Stelle sollte erwähnt werden, dass der Fehler von ±255 pc von den Unsicherheiten in
AV , [F e/H] und vor allem in MV (RR) dominiert wird, und nicht, wie man missverständlich
meinen könnte, von den Messunsicherheiten in den Gl. (2.9).
Zur Verifikation der Resultate werden in der Tabelle 2.1 Distanzen zu M3 aufgeführt, welche
jeweils durch verschiedene Messmethoden bestimmt wurden.
Kommentare zu den erhaltenen Messresultaten
Vergleicht man die in 2.9 berechneten Distanzen mit denjenigen, die in Tabelle 2.1 aufgeführt
sind, so stellt man unmittelbar fest, dass sich die erhaltenen Werte sehr gut in die durch
[Sandage and Cacciari, 1990, Longmore et al., 1990, Carney, 1980] bestimmten Distanzen eingliedern.
Betrachtet man die Resultate der visuellen Helligkeiten mv,unkorr und mv,korr in Gl. 2.8, so
2
Siehe auch Kommentar zu verwendeten Vergleichssternen auf S.29.
Eine weitere, spezielle Unterklasse der RR-Lyrae Sterne, deren Helligkeitsamplitude und/oder Phase mit der
Zeit ändert. Weitere Details in [Kolenberg, 2004].
4
Siehe Programmcode compausgleuichng.m“, Zeile 79-86.
”
3
28
2.3 Resultate und Diskussion
Tabelle 2.1: Distanzbestimmungen zu M3 mit unterschiedlichen Messmethoden
Distanzmodula [mag]
Distanz [pc]
Messmethode/Referenz
(m − M )v,0 = 14.81
9162
Photometrische Main-Sequence Fits zu geeigneten
ZAMSb - Positionen für unterschiedliche Metallizitäten [F e/H]. Nach [Sandage and Cacciari, 1990].
(m − M )v,0 = 14.83
9247
Hergeleitet aus Effektivtemperaturen Te und bolometrischen Helligkeiten mbol , welche mit Hilfe von
UBV Photometrie berechnet wurden. Nach [Carney,
1980].
(m − M )v,0 = 14.99
9954
RR Lyrae log(periode)-infrarot Helligkeitsrelation.
Nach [Longmore et al., 1990].
a
b
Auf interstellare Extinktion AV korrigierte Distanzmodule.
Zero-age main sequence.
führt der dort aufgeführte Unterschied von 0.02 mag zu einem Distanzunterschied von 88 pc.
Im Vergleich zu den in Tabelle 2.1 aufgeführten Distanzen, ist dieser Unterschied jedoch praktisch vernachlässigbar. Unter diesem Gesichtspunkt wäre eine Messung mit der Methode der
Differentiellen Photometrie nur mit der unkorrigierten CCD Aufnahme in diesem Fall sicher
unproblematisch gewesen - man denke hierbei an den höheren Aufwand für die Kalibrierung
der CCD Aufnahme!
Auswahl der Vergleichssterne und Fehlerfortpflanzung
Wie im Kap. 1.3.1 kurz angesprochen, spielt die Auswahl der Vergleichssterne, welche zur
Bestimmung der RR-Lyrae Helligkeiten und deren mittleren Fehler verwendet werden, eine
doch nicht zu verachtende Rolle. Um dies besser nachvollziehen zu können, betrachte man am
besten die Abbildung 2.1.
Wie man dieser sofort entnehmen kann, nimmt der mittlere Fehler bei schwächer werdenden
Helligkeiten zu, was aus dem schlechter werdenden [S/N ]5 hervorgeht. Da nun die RR-Lyrae
Sterne in M3 nach [Cacciari et al., 2005] eine mittlere, visuelle Helligkeit im Intervall von
[15 − 16] mag besitzen, ist es verständlich, dass man Vergleichssterne im angegebenen Intervall verwenden sollte, um die korrekten mittleren Fehler der Helligkeiten an die RR-Lyrae
Sterne anzubringen. Würde man dies nicht berücksichtigen, so würden sich die falsch angebrachten Fehler unmittelbar auf die Fehlerfortpflanzung auswirken und folglich die Resultate
für mv,unkorr und mv,korr , resp. dunkorr und dkorr verfälschen.
2.3.2 Distanzbestimmung zum Offenen Sternhaufen M44
Um eine Distanzbestimmung zu einem offenen Sternhaufen mit Hilfe eines Main-Sequence
Fittings relativ zum Hyadenhaufen durchführen zu können, muss dessen Hauptreihe gut beobachtbar sein. Für dieses Vorhaben eignet sich M44 - auch Praesepe genannt - vorzüglich.
Es handelt sich hierbei um einen jungen, hellen offenen Sternhaufen bei dem die Hauptreihe
sehr gut beobachtbar ist. Die dabei verwendeten Helligkeiten V und (B − V ) wurden mit Hilfe
5
Signal zu Rauschen Verhältnis.
29
2 Experiment
Fehlerverhalten bei Abnahme der Helligkeiten der Vergleichssterne
0.018
Mittlerer Fehler [mag]
0.016
0.014
0.012
0.01
0.008
0.006
14
14.5
15
15.5
16
16.5
17
V [mag]
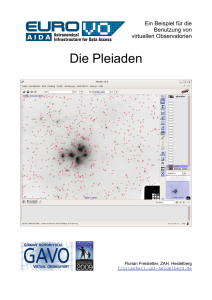
Abbildung 2.1: Abgebildet sind die mittleren Fehler von Vergleichssternen, welche in drei verschiedene Helligkeitsklassen mit je einer Länge von einer Magnitude - nicht
Fehlerbalken - verteilt sind. Verwendet wurden hierbei: korrigierte CCD Aufnahme, je 11 Vergleichssterne in den Intervallen [14 − 15] mag, [15 − 16] mag
und [16 − 17] mag. [Andreas Riedo, 2008].
der All Sky Photometrie bestimmt. Bevor die einzelnen Resultate aufgeführt und besprochen
werden, zuerst einige Bemerkungen zum verwendeten Aufnahmematerial und den berechneten
Transformationskeffizienten der All Sky Photometrie (siehe Kap. 1.3.2).
M44 - Verwendete Aufnahmen
Die der Distanzbestimmung zu Grunde liegenden, instrumentellen Helligkeiten v und b wurden Aufnahmen vom 05.05.2008 entnommen. Dabei wurden je 10 Aufnahmen im B-, resp. im
V-Filter aufgenommen und vor einer Median-Mittelung zu Masteraufnahmen mit Hilfe von
Korrekturaufnahmen kalibriert. Hierbei wurden verwendet:
• Zwei Masterbias; erzeugt aus je 5 Einzelaufnahmen mit Hilfe der Median-Mittelung;
Aufnahmedatum: 05.05.2008,
• Vier Masterdarks à 2 s, 10 s, 32 s und 192 s; erzeugt aus je 5 Einzelaufnahmen mit Hilfe
der Median-Mittelung; Aufnahmedatum: 05.05.2008,
• B,V Masterflats; erzeugt aus je 10 Einzelaufnahmen mit Hilfe der Median-Mittelung; da
Intensitäten der Einzelaufnahmen wegen Dämmerung abnahmen, wurden diese vor Mittelung durch MaxIm DL auf die gleiche Helligkeit skaliert; Aufnahmedatum: 05.05.2008,
• sämtliche Kalibrieraufnahmen wurden im 2×2 Binning aufgenommen, resp. mit einer
Grösse von 1024×1024 Pixel. Da jedoch die Rohaufnahmen eine Grösse von 2048×2047
Pixel aufweisen, mussten die Kalibrieraufnahmen auf die entsprechende Grösse skaliert
werden. Hierbei wurden nicht die Einzelaufnahmen sondern die Masteraufnahmen vergrössert,
30
2.3 Resultate und Diskussion
• sämtliche Kalibierungs- und Photometriearbeiten wurden mit MaxIm DL durchgeführt.
All Sky Photometrie - Verwendete Aufnahmen
Bevor ein Main-Sequence Fitting mit den gemessen, instrumentellen Helligkeiten b, v durchgeführt werden kann, müssen diese zuerst mit Hilfe der Gleichungen 1.6 in Kap. 1.3.2 auf
Standardmagnituden umgerechnet werden. Die dabei notwendigen Transformationskoeffizienten Tj , Kj und Zj wurden mit Hilfe der Landoltstandardfelder SA107, SA104 und SA104E
(vgl. [Landolt, 1992]) bestimmt. Verwendet wurden hierbei die Aufnahmen:
• SA107: je 2 Aufnahmen in B,V; SA104: je 3 Aufnahmen in B,V; SA104E: 3 Aufnahmen in
B und 2 Aufnahmen in V; Aufnahmen wurden einzeln kalibriert; mit Median-Mittelung
wurden Masteraufnahmen erzeugt; Aufnahmedatum: 10.05.08,
• Flatfields: es wurden Bias und Dark korrigierte Flatfields vom 05.05.2008 verwendet;
Bias und Dark vom 05.05.2008; gleiche Aufnahmen wie für Kalibrierung der Rohaufnahmen von M44 (siehe oben),
• Bias: drei median-gemittelte Masterbias; zwei davon bestehen aus je 3 Einzelaufnahmen; dritte Masteraufnahme besteht aus Mittelung der zwei vorherigen Dreierserien;
Aufnahmedatum: 10.05.2008,
• Dark: ein Masterdark à 180 s; erzeugt durch 4 Einzelaufnahmen; Aufnahmedatum:
10.05.2008,
• Bias und Dark-Einzelaufnahmen wurden im 2×2 Binning-Modus aufgenommen, für
die Kalibrierung der Rohaufnahmen wurden sie zuerst median-gemittelt und dann auf
2048×2047 Pixel skaliert.
• Transmissionsserie vom 06.05.2008 für die Bestimmung der Kj und Zj . Da die Transmissionsserie vom Abend des 05.05.2008, an welchem die Rohdaten für M44 aufgenommen
wurden, Fehler aufwies, musste eine des darauf folgenden Abends verwendet werden.
Die Atmosphärischen Situationen der beiden Abenden waren ungefähr vergleichbar.
In den folgenden Abschnitten werden nun die Resultate der Transformationskoeffizienten nach
Gl. 1.6 besprochen, wobei zuerst diejenigen für die Umrechnung auf VStandard , resp. Tv , Kv , Zv ,
behandelt werden - nachfolgend dann diejenigen für (B − V )Standard . Für die Berechnung der
Koeffizienten wurden die in Kap. 1.3.2 besprochenen Ausgleichungsmodelle verwendet.
Resultate für Tv , Kv , Zv
Mit Hilfe der Landoltstandardfelder konnten in einem ersten Schritt der Wert für Tv ermittelt werden. Verwendet man für die Berechnung dessen die kalibrierten Aufnahmen6 , so
erhält man
Tv,kal = −0.15 ± 0.12,
6
RM S = 0.13 mag.
(2.10)
Sämtliche Koeffizienten, welche mit kalibrierten Aufnahmen berechnet wurden, sind im Folgenden mit dem
Index kal gekennzeichnet.
31
2 Experiment
Betrachtet man nun aber die Abb. 2.2, auf der links die Messungen gefittet und rechts die berechneten Residuen dargestellt sind, so stellt man unzufrieden fest, dass die Messungen Fehler
bis zu 0.25 mag und Peak zu Peak sogar ∼ 0.5 mag haben - Erwartet hätte man bei kalibrierten
Aufnahmen Fehler im Bereich von ∼ 0.03 mag! Um nun die Herkunft dieser grossen Fehler genauer analysieren zu können, wurden mit Hilfe der institutseigenen Auswertungssoftware für
Sternhelligkeiten7 je eine unkorrigierte Aufnahme der drei verwendeten Landoltstandardfelder
prozessiert. Mit Hilfe erwähnter Software erhält man für den Farbtransformationskoeffizient
Tv den Wert
Tv,Sof tware,unkorr,ungemittelt = −0.09 ± 0.06,
RM S = 0.06 mag
(2.11)
der mit dem vorherigen Ergebnis nicht im Widerspruch steht. Jedoch stellt man unverzüglich
fest, dass dessen mittleren Fehler um einen Faktor ∼ 2 reduziert wurde, was mit der Betrachtung der Abb. 2.3 verdeutlicht wird.
Residuen der Beobachtungen in Funktion von V
Tv Bestimmung / Messungen − Nullpunkt
(V − v) Landolt − Messung [mag]
v
0.1
0
−0.1
−0.2
−0.3
v Messung + (B − V) Landolt * Tv + Qv − VLandolt [mag]
Landoltfeld SA107
Landoltfeld SA104 1.Feld
Landoltfeld SA104 2.Feld
T = Steigung Linear Fit
0.2
Landolt
0.3
0.3
0.2
0.1
0
−0.1
−0.2
−0.3
Residuen
−0.4
0.5
0.6
0.7
0.8
0.9
1
(B − V)
Landolt
1.1
1.2
1.3
1.4
1.5
−0.4
12
[mag]
12.5
13
13.5
14
14.5
15
V Landolt [mag]
Abbildung 2.2: Tv Bestimmung; Reduktion: Bias, Dark, Flatfield, gemittelte Aufnahmen; Software: MaxIm DL; Links: Messungen mit linearem Fit mit Steigung = Tv ;
Rechts: Residuen der Beobachtungen in Funktion von VLandolt . Es ist kein
Trend der Residuen zu beobachten. [Andreas Riedo, 2008].
Mit den Abb. 2.2 und 2.3 wird nun deutlicher und wahrscheinlicher, dass Fehler bei der Kalibrierung der Rohdaten mit Bias, Dark und Flatfield entstanden sind. Um diesem Verdacht
noch weiter auf den Grund zu gehen, wurden mit der Software korrigierte aber nicht miteinander gemittelte Aufnahmen der drei vorherigen, besprochenen Aufnahmen prozessiert. Der
berechnete Farbtransformationskoeffizient Tv lautet in diesem Fall:
Tv,Sof tware,korr,ungemittelt = −0.06 ± 0.14,
RM S = 0.13 mag.
(2.12)
Wiederum steht dieser Wert mit den vorherigen nicht im Widerspruch. Zu erkennen ist hier die
mehr als doppelte Zunahme des mittleren Fehlers gegenüber dem Ergebnis mit unkorrigierten
und ungemittelten Aufnahmen. Dies wird in Abb. 2.4 nochmals verdeutlicht.
Vergleicht man des Weiteren die Fehler in Abb. 2.2 mit denjenigen in Abb. 2.4, ist es eher
unwahrscheinlich, dass mit dem Blenden-Photometrie Tool von MaxImDL falsch gemessen
7
Koeffizienten, welche mit Hilfe der instituseigenen Software berechnet wurden, sind mit dem Index Sof tware
gekennzeichnet.
32
2.3 Resultate und Diskussion
Residuen der Beobachtungen in Funktion von V Landolt
Tv Bestimmung / Messungen − Nullpunkt
0.15
Landoltfeld SA107
Landoltfeld SA104 1.Feld
Landoltfeld SA104 2.Feld
Tv = Steigung Linear Fit
0.1
(V − v) Landolt − Messung [mag]
v Messung + (B − V) Landolt * Tv + Qv − VLandolt [mag]
0.15
0.05
0
−0.05
−0.1
−0.15
0.1
0.05
0
−0.05
−0.1
−0.15
Residuen
−0.2
0.5
0.6
0.7
0.8
0.9
1
(B − V)
Landolt
1.1
1.2
1.3
1.4
−0.2
1.5
12
12.5
[mag]
13
13.5
V Landolt [mag]
14
14.5
15
Abbildung 2.3: Tv Bestimmung; Reduktionen: keine; Software: institutseigene; Links: Messungen mit linearem Fit mit Steigung = Tv ; Rechts: Residuen der Beobachtungen
in Funktion von VLandolt . Gegenüber der Abb. 2.2 sind die Abweichungen um
einen Faktor ∼ 2 reduziert worden. Des Weiteren ist auch hier kein Trend der
Fehler zu beobachten. Hinzuzufügen ist, dass in Folge von Softwarekriterien
die Anzahl vermessener Landoltsterne nicht 100% identisch ist mit derjenigen,
welche aus Handmessungen mit MaxIm DL resultiert. [Andreas Riedo, 2008].
T Bestimmung / Messungen − Nullpunkt
Residuen der Beobachtungen in Funktion von V
v
0.25
v
(V − v) Landolt − Messung [mag]
0.15
0.1
0.05
0
−0.05
−0.1
−0.15
−0.2
0.5
0.6
0.7
0.8
0.9
1
1.1
(B − V)Landolt [mag]
1.2
1.3
1.4
Residuen
v Messung + (B − V) Landolt * Tv + Qv − VLandolt [mag]
Landoltfeld SA107
Landoltfeld SA104 1.Feld
Landoltfeld SA104 2.Feld
T = Steigung Linear Fit
0.2
−0.25
Landolt
0.25
0.2
0.15
0.1
0.05
0
−0.05
−0.1
−0.15
−0.2
12
12.5
13
13.5
V Landolt [mag]
14
14.5
15
Abbildung 2.4: Tv Bestimmung; Reduktionen: Bias, Dark, Flatfiled, ungemittelte Aufnahmen;
Software: institutseigene; Links: Messungen mit linearem Fit mit Steigung =
Tv ; Rechts: Residuen der Beobachtungen in Funktion von VLandolt . Die Messungenauigkeiten nehmen gegenüber Abb. 2.3 deutlich zu. [Andreas Riedo,
2008].
33
2 Experiment
wurde. Folglich verhärtet sich der Verdacht, dass die Kalibrierung der Rohdaten die Messung
mehr verfälscht als verbessert hat. Wo nun aber der Fehler bei der Kalibrierung der Rohdaten
geschah, kann hier nicht erklärt werden. Die verwendeten Korrekturaufnahmen wurden dies
betreffend nochmals durchgeschaut und kontrolliert, es wurden jedoch keinen Besonderheiten
an den Einzelaufnahmen festgestellt - folglich können Fehler an den Aufnahmen ausgeschlossen
werden. Weitere, mögliche Fehlerquellen:
• Die verwendeten Flatfiles wurden vor der Mittelung (siehe Abschnitt M44 - Verwendete Aufnahmen auf S.31) wegen der Dämmerung skaliert - dies schlägt MaxIm DL
in den Manuals vor. Der von MaxIm DL verwendete Algorithmus zur Mittelung ist
jedoch unbekannt. Umgehen könnte man diese mögliche Fehlerquelle, indem man nur
eine Flatfield-Aufnahme statt mehrere zu einer gemittelten Masteraufnahme verwenden
würde.
• Anwendung der Kalibrieraufnahmen auf die Rohdaten durch MaxIm DL.
• Falsch verwendete Einstellungen. Da MaxIm DL die Kalibrierung mehr oder weniger
vorgibt, kann man hier nicht viel falsch machen. Man könnte dies umgehen indem man
ein anderes Programm, wie z.B. IRAF zur Auswertung verwenden würde.
Da sich ein Fehler bei der Kalibrierung eingeschlichen haben könnte, wird für die Berechnung der zwei übrigen Koeffizienten Kv und Zv zusätzlich, neben dem berechneten Wert aus
kalibrierten und miteinander gemittelten Aufnahmen, resp. Tv,kal , derjenige aus unkalibrierten und ungemittelten, resp. Tv,Sof tware,unkorr,ungemittelt , verwendet. Da beide Werte praktisch
Null betragen, wird aus experimenteller Sicht auch der Wert Tv,exp = 0 für weitere Berechnungen mitgezogen.
Implementiert man nun die drei verschiedenen Tv,j -Werte in die Ausgleichungsmodelle für die
Bestimmung der Koeffizienten Kv , Zv , so erhält man dafür folgende Ergebnisse:
Kv,Tv =0 = (−0.25 ± 0.01);
Zv,Tv =0 = (22.11 ± 0.02);
RM S = 0.03 mag;
Kv,Tv =−0.09 = (−0.27 ± 0.02);
Zv,Tv =−0.09 = (22.20 ± 0.04);
RM S = 0.05 mag;
Kv,Tv =−0.15 = (−0.28 ± 0.03);
Zv,Tv =−0.15 = (22.26 ± 0.06);
RM S = 0.08 mag;
(2.13)
Wie bei der Berechnung von Tv ist bei der Berechnung von Kv und Zv ein ähnliches Fehlerverhaltensmuster zu erkennen (vgl. Abb. 2.6 mit Abb. 2.7), resp. die Ungenauigkeiten nehmen
von Tv = −0.09 gegenüber Tv = −0.15 zu. Absolut gesehen, beobachten man die kleinsten
Fehler bei Verwendung von Tv = 0 (siehe Abb. (2.5)).
Sämtliche Tv sowie die dazugehörigen Kv und Zv Werte, welche später für die Distanzbestimmung verwendet werden, sind in Tabelle 2.2 übersichtshalber nochmals aufgeführt.
Resultate für Tbv , Kbv , Zbv
Bei Verwendung der kalibrierten und miteinander gemittelten Rohaufnahmen der Landoltstandardfelder, erhält man für den Farbtransformationskoeffizienten Tbv , der neben Kbv und
Zbv für die Umrechnung auf Standard (B − V ) Magnituden benötigt wird, den Wert
34
2.3 Resultate und Diskussion
Bestimmung von Kv und Zv
Residuen der Beobachtungen in Funktion der Luftmasse
22.1
22
0.06
0.04
21.8
Residuen [mag]
(V − v) − (B − V) Katalog * Tv,Landolt
21.9
21.7
21.6
21.5
0.02
0
−0.02
21.4
21.3
−0.04
21.2
Messungen
Kv = Steigung Linear Fit
21.1
0
0.5
1
1.5
Luftmasse X
2
2.5
−0.06
3
0.5
Resiuden
1
1.5
2
Luftmasse X
2.5
3
Abbildung 2.5: Verwendet: Tv = 0. Links: Linearer Fit durch die Messungen der Transmissionsserie; Rechts: Residuen der Beobachtungen in Funktion der Luftmasse.
Sämtliche Residuen liegen in einem Intervall von [−0.05, +0.05] mag. [Andreas
Riedo, 2008].
Bestimmung von K und Z
Residuen der Beobachtungen in Funktion der Luftmasse
v
0.15
22
0.1
Residuen [mag]
(V − v) − (B − V) Katalog * Tv,Landolt
v
22.2
21.8
21.6
0.05
0
21.4
−0.05
21.2
Messungen
K = Steigung Linear Fit
Resiuden
v
0
0.5
1
1.5
Luftmasse X
2
2.5
3
0.5
1
1.5
2
Luftmasse X
2.5
3
Abbildung 2.6: Verwendet: Tv = −0.09. Links: Linearer Fit durch die Messungen der Transmissionsserie; Rechts: Residuen der Beobachtungen in Funktion der Luftmasse. Gegenüber der Abb. 2.5 liegen hier nun einige Residuen ausserhalb des
Intervalls [−0.05, +0.05] mag. [Andreas Riedo, 2008].
Tabelle 2.2: Tv , Kv und Zv Werte für Distanzbestimmung
Tv,Sof tware,unkorr,ungemittelt = (−0.09 ± 0.06);
Kv,Tv =−0.09 = (−0.27 ± 0.02);
Zv,Tv =−0.09 = (22.20 ± 0.04);
Tv,kal = −0.15 ± 0.12.
Kv,Tv =−0.15 = (−0.28 ± 0.03);
Zv,Tv =−0.15 = (22.26 ± 0.06);
Tv,exp = 0;
Kv,Tv =0 = (−0.25 ± 0.01);
Zv,Tv =0 = (22.11 ± 0.02);
35
2 Experiment
Bestimmung von Kv und Zv
Residuen der Beobachtungen in Funktion der Luftmasse
0.2
22.2
0.1
Residuen [mag]
(V − v) − (B − V) Katalog * Tv,Landolt
0.15
22
21.8
21.6
0
−0.05
21.4
Messungen
Kv = Steigung Linear Fit
21.2
0
0.05
0.5
1
1.5
Luftmasse X
2
2.5
3
−0.1
Resiuden
0.5
1
1.5
2
Luftmasse X
2.5
3
Abbildung 2.7: Verwendet: Tv = −0.15. Links: Linearer Fit durch die Messungen der Transmissionsserie; Rechts: Residuen der Beobachtungen in Funktion der Luftmasse.
Gegenüber der Abb. 2.6 liegen schon deutlich mehr Residuen ausserhalb des
Bereiches von [−0.05, 0.05] mag. [Andreas Riedo, 2008].
Tbv,kal = (0.80 ± 0.10),
RM S = 0.04 mag.
(2.14)
Betrachtet man zusätzlich die zum obigen Resultat zugehörigen Abb. 2.8, dann stellt man
fest, dass es doch einige Messungen mit Ungenauigkeiten von mehr als 0.05 mag gibt - wohlbemerkt bei eigentlich kalibrierten Aufnahmen. Zum Vergleich wurden wieder unkorrigierte
und ungemittelte Aufnahmen mit der Instituts-Software prozessiert, mit folgendem Ergebnis
Tbv,Sof tware,unkorr,umgemittelt = (0.91 ± 0.13),
RM S = 0.11 mag.
(2.15)
Im Vergleich zum vorangegangenen Resultat sind keine Widersprüche auffindbar. Vergleicht
man jedoch die Ungenauigkeiten der Messungen (b−v) in Abb. 2.8 mit denjenigen in Abb. 2.9,
so ist umgehend zu erkennen, dass die Fehler in den unkalibrierten Aufnahmen doch grösser
sind. Nichts desto trotz sollten aber die Resultate in den kalibrierten Aufnahmen besser sein,
obwohl eine Verbesserung8 beobachtbar ist.
Implementiert man diese Werte ins Ausgleichungsmodell für die Berechnung von Kbv und Zbv ,
so erhält man dafür folgende Resultate:
Kbv,Tbv =0.80 = (−0.19 ± 0.12);
Zbv,Tbv =0.80 = (−0.59 ± 0.22);
RM S = 0.26 mag;
Kbv,Tbv =0.91 = (−0.20 ± 0.11);
Zbv,Tbv =0.91 = (−0.20 ± 0.19);
RM S = 0.20 mag.
(2.16)
Betrachtet man nun aber die mit Tbv = 0.91 erstellten Abb. 2.109 , resp. die Residuen, so stellt
man unmittelbar fest, dass die berechneten Abweichungen einfach zu gross sind - praktisch
eine ganze Magnitude von Peak zu Peak! Des Weiteren sind starke Fluktuationen in hohen
Elevationen, resp. praktisch in Zenitnähe, sehr gut erkennbar - in Horizontnähe könnten diese
Abweichungen noch erklärbar sein.
8
Hier wäre eine doppelte Kompensation der durch die Kalibrierung verursachten Fehler denkbar, da b und v
Messungen in die Berechnungen hineinfliessen.
9
Bei Verwendung von Tbv = 0.80 sind ähnliche Abb. beobachtbar.
36
2.3 Resultate und Diskussion
Tbv Bestimmung / (B − V) − Nullpunkt
Relation zwischen Fehler und ansteigenden (B − V) Landolt
2.5
0.15
0.1
Fehler an (b − v) Messung [mag]
(B − V) Landolt [mag]
Landoltfeld SA107
Landoltfeld SA104 1.Feld
Landoltfeld SA104 2.Feld
Tbv = Steigung Linear Fit
2
1.5
0.05
0
−0.05
Differenzen
1
1.4
1.6
1.8
2
2.2
(b − v) Messung [mag]
2.4
2.6
−0.1
2.8
0.5
0.6
0.7
0.8
0.9
1
1.1
(B − V) Landolt [mag]
1.2
1.3
1.4
Abbildung 2.8: Tbv Bestimmung; Reduktionen: Bias, Dark, Flatfield, gemittelte Aufnahmen;
Software: MaxIm DL; Links: Messungen mit linearem Fit mit Steigung = Tbv ;
Rechts: Residuen der Beobachtungen (b−v) in Funktion von (B−V )Landolt . Die
meisten Residuen befinden sich in [−0.05, +0.05] mag oder leicht ausserhalb.
Einige Ausreisser sind aber dennoch zu erkennen. [Andreas Riedo, 2008].
T
bv
Bestimmung / (B − V) − Nullpunkt
Relation zwischen Fehler und ansteigenden (B − V)
2.6
Landoltfeld SA107
Landoltfeld SA104 1.Feld
Landoltfeld SA104 2.Feld
Tbv = Steigung Linear Fit
0.2
0.15
Fehler an (b − v) Messung [mag]
2.4
2.2
(B − V) Landolt [mag]
Landolt
0.25
2
1.8
1.6
0.1
0.05
0
−0.05
−0.1
−0.15
1.4
−0.2
Differenzen
1.4
1.6
1.8
2
(b − v) Messung [mag]
2.2
2.4
−0.25
0.5
0.6
0.7
0.8
0.9
1
1.1
(B − V) Landolt [mag]
1.2
1.3
1.4
Abbildung 2.9: Tbv Bestimmung; Reduktionen: keine; Software: institutseigene; Links: Messungen mit linearem Fit mit Steigung = Tbv ; Rechts: Residuen der Beobachtungen (b − v) in Funktion von (B − V )Landolt . Gegenüber der Abb. 2.8 ist
eine deutliche Zunahme der Residuen zu erkennen. [Andreas Riedo, 2008].
37
2 Experiment
Bestimmung von Kbv und Zbv
Fehler an Messungen
0.4
Messungen
Kbv = Steigung Linear Fit
−0.4
Fehler an (b − v)Messung [mag]
(B − V) Katalog − (b − v) Messung * Tbv, Landolt
0.3
−0.6
−0.8
−1
−1.2
−1.4
0.2
0.1
0
−0.1
−0.2
−0.3
−1.6
Fehler an (b − v)Messung
−0.4
0
0.5
1
1.5
2
Luftmasse X
2.5
3
0.5
1
1.5
2
Luftmasse X
2.5
3
Abbildung 2.10: Verwendet: Tbv = 0.91; Links: Linearer Fit durch die Messungen der Transmissionsserie; Rechts: Die Abweichungen zum linearen Fit, resp. die berechneten Fehler der Messungen. Man betrachte die grossen Abweichungen! [Andreas Riedo, 2008].
Da jedoch bei der Bestimmung von Kv und Zv mit derselben Transmissionsserie, die auch
hier verwendet wurde, keine derartigen Abweichungen auftauchten, müssten die Fehler in den
b-Messungen liegen. Um dies genauer zu überprüfen, wurde hierzu der Farbtransformationskoeffizient Tb analog wie Tv mit Hilfe von unkalibrierten und ungemittelten10 Landoltaufnahmen
bestimmt. Nach kleinen Modifikationen11 des Ausgleichungmodelles für die Bestimmung von
Kv und Zv , konnten die entsprechenden Werte für Kb und Zb sowie die dazugehörigen Abbildungen berechnet und erzeugt werden (siehe Abb. 2.11).
Bestimmung von K und Z
b
Fehler an Messungen
b
0.25
21
0.2
Fehler an bMessung [mag]
(B − b) − (B − V) Katalog * Tb,Landolt
0.15
20.5
20
0.1
0.05
0
−0.05
−0.1
−0.15
−0.2
Messungen
Kb = Steigung Linear Fit
19.5
0
0.5
1
1.5
Luftmasse X
2
2.5
3
Fehler an bMessung
−0.25
0.5
1
1.5
2
Luftmasse X
2.5
3
Abbildung 2.11: Verwendet: Tb = 0.11; Links: Linearer Fit durch die Messungen der Transmissionsserie; Rechts: Die Abweichungen zum linearen Fit, resp. die berechneten
Fehler der Messungen. [Andreas Riedo, 2008].
Vergleicht man nun die neu erzeugten Abb. 2.11 mit denjenigen in Abb. 2.10, so stellt man
unmittelbar fest, dass das Fehlerverhalten untereinander identisch ist. Es stellt sich nun die
10
11
Um möglichen Kalibrierungsfehlern aus dem Weg zu gehen.
Die Messungen vM essung wurden durch bM essung ersetzt; VLandolt mit BLandolt .
38
2.3 Resultate und Diskussion
Frage, wodurch dieser Effekt zustande kam. Würde man nur die (b − v)-Messungen betrachten, so könnte eine sehr instabile Atmosphäre denkbar sein. Die Berechungen einer weiteren
Transmissionsserie vom 10.06.08 mit den gleichen Tj -Werten zeigen jedoch ein ähnliches Fehlerverhalten. Unter diesen Umständen könnten folgende Bemerkungen den Effekt erklären:
• Die Berechnung von Tbv ist komplett falsch. Denn, würde man für Tbv den Wert 1.8
und nicht 0.91 oder 0.80 in die Berechnungen implementieren, würde man Fehler der
gleichen Grössenordnung wie bei Kv und Zv beobachten (siehe Abb. 2.12). Unter der
Annahme, dass sämtliche B-Messungen fehlerfrei sind, scheint der verwendete Wert eher
unwahrscheinlich, da in den Berechnungen nie ein derart hoher Wert erhalten wurde.
Tbv = 1.8 würde unter der Annahme, dass die Messungen in V fehlerfrei sind, bedeuten,
dass die B-Messungen den V -Messungen zu ähnlich sind, resp. dass die B-Messungen
eigentlichen B-Messungen nicht entsprechen.
• Systematischer Fehler hervorgerufen durch B-empfindliche Teile der verwendeten Apparatur. Nicht korrekte Messungen in B würden sich stark - unter Annahme in V ist alles
fehlerfrei - auf die Berechnungen von Tbv auswirken und folglich auch auf diejenige von
Kbv und Zbv .
Bestimmung von K
bv
und Z
−2.4
Fehler an Messungen
bv
Messungen
Kbv = Steigung Linear Fit
Fehler an (b − v)Messung [mag]
(B − V) Katalog − (b − v) Messung * Tbv, Landolt
0.1
−2.6
−2.8
−3
−3.2
0.05
0
−0.05
−3.4
−0.1
Fehler an (b − v)Messung
−3.6
0
0.5
1
1.5
2
Luftmasse X
2.5
3
0.5
1
1.5
2
Luftmasse X
2.5
3
Abbildung 2.12: Verwendet: Tbv = 1.8 mit Hilfe von unkalibrierten und ungemittelten Rohaufnahmen von Landoltfeldern. Links: Linearer Fit durch die Messungen der
Transmissionsserie; Rechts: Die Abweichungen zum linearen Fit, resp. die
berechneten Fehler der Messungen. Die Ungenauigkeiten nehmen bei Verwendung von Tbv = 1.8 stark ab und würden ungefähr mit denjenigen der
visuellen Berechnungen in Abb. 2.6 übereinstimmen. [Andreas Riedo, 2008].
Weitere Messungen in Art und Ausmass sind wohl notwendig, um die Fehlerquelle 100% ausfindig zu machen. Diese würden jedoch das Ziel und den Umfang dieser Arbeit verfehlen. In
diesem Sinne werden die erhaltenen Resultate für die weiteren Berechnungen kommentarlos
mitgezogen.
Sämtliche Werte, die für die Umrechnung auf Standard (B − V ) Magnituden und somit für
die Distanzbestimmung notwendig sind, werden in Tabelle 2.3 nochmals übersichtshalber aufgeführt.
39
2 Experiment
Tabelle 2.3: Tbv , Kbv und Zbv Werte für Distanzbestimmung
Tbv,kal = (0.80 ± 0.10);
Kbv,Tbv =0.80 = (−0.19 ± 0.12);
Zbv,Tbv =0.80 = (−0.59 ± 0.22);
Tbv,Sof tware,unkorr,umgemittelt = (0.91 ± 0.13);
Kbv,Tbv =0.91 = (−0.20 ± 0.11);
Zbv,Tbv =0.91 = (−0.20 ± 0.19);
Distanzbestimmung zu M44
Da nun sämtliche Koeffizienten für die Umrechnung auf Standard V und (B − V ) Magnituden vorhanden sind, ist eine Distanzbestimmung zu M44 durchführbar. Diese wird mit drei
verschiedenen Sets von Koeffizienten durchgeführt und die damit erhaltenen Resultate werden
im folgendem miteinander verglichen werden. Tabelle 2.4 gibt diesbezüglich eine Übersicht der
verwendeten Koeffizienten.
Tabelle 2.4: Koeffizienten für Distanzbestimmung
1.Distanzbestimmung mit:
Tv,kal = (−0.15 ± 0.12);
v,Tv =−0.15 = (−0.28 ± 0.03);
Zv,Tv =−0.15 = (22.26 ± 0.06);
Tbv,kal = (0.80 ± 0.10);
Kbv,Tbv =0.80 = (−0.19 ± 0.12);
Zbv,Tbv =0.80 = (−0.59 ± 0.22);
2.Distanzbestimmung mit:
Tv,Sof tware,unkorr,ungemittelt = (−0.09 ± 0.06);
Kv,Tv =−0.09 = (−0.27 ± 0.02);
Zv,Tv =−0.09 = (22.20 ± 0.04);
Tbv,Sof tware,unkorr,umgemittelt = (0.91 ± 0.13);
Kbv,Tbv =0.91 = (−0.20 ± 0.11);
Zbv,Tbv =0.91 = (−0.20 ± 0.19);
3.Distanzbestimmung mit:
Tv,exp = 0;
Kv,Tv =0 = (−0.25 ± 0.01);
Zv,Tv =0 = (22.11 ± 0.02);
Tbv,Sof tware,unkorr,umgemittelt = (0.91 ± 0.13);
Kbv,Tbv =0.91 = (−0.20 ± 0.11);
Zbv,Tbv =0.91 = (−0.20 ± 0.19);
Bevor nun die Ergebnisse der berechneten Distanzen angegeben werden, hier noch einige
zusätzliche Bemerkungen zum Vorgehen des angewandten Main-Sequence Fittings:
1. Die mit MaxIm DL gemessenen Helligkeiten (b − v) werden in einem ersten Schritt mit
Hilfe der berechneten Koeffizienten auf Standard (B − V ) Magnituden umgerechnet,
2. Diese werden anschliessend verwendet, um Standard V Magnituden zu berechnen12 ,
3. In einem nächsten Schritt werden die erhaltenen Resultate für V und (B − V ) und
die Daten13 des Hyaden-Haufens in einem Farbenhelligkeitsdiagramm, resp. V gegen
(B − V ), aufgetragen,
12
Für die Umrechnung auf Standard V wurden im Ausgleichungsmodell Standard (B − V ) für die Berechnung
von Tv verwendet und nicht (b − v)M essung . Grund: So konnte vermieden werden, dass weitere Ungenauigkeiten, die von (b − v) herrühren würden, für die Bestimmung von Tv miteinbezogen werden, resp.
(B − V )Landolt -Daten sind präzise gemessen worden.
13
Die Daten stammen aus der Online-Datenbank WEBDA - http://www.univie.ac.at/webda/.
40
2.3 Resultate und Diskussion
4. Die Hauptreihen werden anschliessend visuell bestimmt und zusätzlich ins Diagramm
eingetragen,
5. Horizontaldistanz ∆Mv der beiden Hauptreihen-Linien kann bestimmt und für die Distanzbestimmung (siehe Gl. 1.26) verwendet werden.
6. Für die Berechnung von ∆A = AV,P reaepe − AV,Hyaden = (3.1 ± 0.1)E(B−V ),P raesepe −
(3.1 ± 0.1)E(B−V ),Hyaden (siehe Gl. 1.26)) werden für E(B−V ),P raesepe und E(B−V ),Hyaden
nach [Taylor, 2006] folgende Werte verwendet: E(B−V ),P raesepe = (0.0027 ± 0.004) mag
und für E(B−V ),Hyaden = 0.001 mag verwendet14 . Folglich lässt sich der Wert für ∆AV
in Verwendung der Fehlerfortpflanzung berechnen zu: ∆AV = (0.08 ± 0.01) mag.
Implementiert man sämtliche Angaben in die Prozedur der Distanzbestimmung, so erhält man
dafür folgende Resultate (siehe Tab. 2.5):
Tabelle 2.5: Berechnete Distanzen zu M44
1.Distanzbestimmung:
(144.4 ± 86.7) pc;
2.Distanzbestimmung:
(28.2 ± 13.0) pc;
3.Distanzbestimmung:
(30.9 ± 14.3) pc;
Bevor die erhaltenen Resultate kommentiert werden, sollen an dieser Stelle einige weitere,
veröffentlichte Distanzen zu M44 als Referenz aufgeführt werden:
Tabelle 2.6: Veröffentlichte Distanzen zu M44
Distanzmodul (m − M )0 [mag]
Distanz [pc]
Art der Messung / Referenz
(6.24 ± 0.12)
(177 ± 10)
Parallaxenmessung
neault et al., 1998]
(6.16 ± 0.05)
(171 ± 4)
Main-Sequence
et al., 1998]
(6.19 ± 0.06)
(173 ± 5)
Main-Sequence Fitting; [Percial et al.,
2003]
Hipparcos;
Fitting;
[Pinson-
[Pinsonneault
Kommentare zu erhaltenen Resultaten
Vergleicht man die berechneten Distanzen mit den Referenzwerten in Tab. 2.6, so stellt man
fest, dass die erste Distanzbestimmung - aufbauend auf korrgierten und gemittelten Aufnahmen - die gesuchte Distanz zu M44 am besten darstellt15 . Sogleich erkennt man auch, dass
die zwei letzteren Distanzen viel zu niedrig sind - M44 ist sogar näher zu uns gelegen als die
Hyaden (vgl. Abb. 2.14 mit Abb. 2.13)! Dieser Umstand wird jedoch erklärbar, wann man
feststellt, dass bei den verwendeten Zbv und Tbv ein Unterschied von ∼ 0.4 mag, resp. ∼ 0.1
besteht.
14
Nach [Taylor, 2006] beträgt der Wert für E(B−V ),Hyaden ≤ 0.001 mag. Für die Berechnung von ∆AV wird
0.001 mag verwendet.
15
Mögliche Fehler in Kalibrierung könnten sich hierbei aufgehoben haben.
41
2 Experiment
Des Weiteren sind auch die grossen Fehlerangaben in allen drei Resultaten zu erkennen. Durch
die allg. hohen Ungenauigkeiten der Transformationskoeffizienten für die Umrechnung auf
Standard (B − V ) Magnituden, sind die angegebenen und geschätzten Fehler16 nicht verwunderlich (vgl. Abb. 2.13 und Abb. 2.14). Um diese gegen unten korrigieren zu können, müssten
die Transformationskoeffizienten mit vielen weiteren Messungen hoch genau bestimmt werden, bevor ein weiteres Fitting durchgeführt werden würde.
Hauptreihe von den Hyaden und Praesepe
Hyaden
M44−Messung
Hauptreihe M44
Hauptreihe Hyaden
M44−Katalog
Fehlerabschätzungen
4
6
V [mag]
8
10
12
14
16
0
0.5
1
B − V [mag]
1.5
2
Abbildung 2.13: Abgebildet: Hauptreihe der Hyaden und von Prasepe in Verwendung des ersten Sets von Transformationskoeffizienten. Die angesprochenen Fehlerbalken,
welche hauptsächlich durch ungenaue Koeffizienten für die Umrechnung auf
Standard (B −V ) entstanden sind, sind hierbei gut erkennbar. Zum Vergleich
wurden zusätzlich die Katalogdaten von den vermessenen M44 Sterne geplottet. Man stellt fest, dass Katalogdaten - mit wenigen Ausnahmen - durch die
Fehlerbalken der Messungen erreicht werden (vgl. Situation in Abb. 2.14).
[Andreas Riedo, 2008].
16
Der Fehler des vertikalen Abstands wurde anhand der (B − V )-Ungenauigkeiten visuell bestimmt. Für
die Fehlerfortpflanzung von ∆M wurden verwendet: 1.Distanz,Hauptreihe M44: (6.5 ± 1.3) mag; 2.Distanz,Hauptreihe M44: (3.0 ± 1.0) mag; 3.Distanz,Hauptreihe M44: (3.2 ± 1.0) mag; Hauptreihe Hyaden:
(4.0 ± 0.1) mag; Werte beziehen sich auf (B − V ) = 0.
42
2.3 Resultate und Diskussion
Hauptreihe von den Hyaden und Praesepe
Hyaden
M44−Messung
Hauptreihe M44
Hauptreihe Hyaden
M44−Katalog
Fehlerabschätzungen
4
6
V [mag]
8
10
12
14
16
0
0.5
1
B − V [mag]
1.5
2
Abbildung 2.14: Abgebildet: Hauptreihe der Hyaden und von Prasepe in Verwendung des
zweiten Sets von Transformationskoeffizienten. Die Grösse der Fehlerbalken
haben sich gegenüber der Abb. 2.13 nicht wesentlich verändert. Unübersehbar
ist jedoch, dass sich die Hauptreihe von M44 über derjenigen der Hyaden
befindet. Folglich wäre M44 näher zu uns gelegen als die Hyaden, was in
Widerspruch mit den Werten in Tab. 2.6 steht. Betreffend den Katalogdaten
und den Messungen mit Fehlerbalken ist gegenüber der Abb. 2.13 die gegenteilige Situation erkennbar, resp. nur wenige der Katalogdaten stehen mit
den Messungen in Verbindung. Abgebildete Situation ist auch bei der dritten
Distanzbestimmung zu beobachten. Da mit dieser keine neuen Erkenntnisse
gewonnen werden, wird auf eine zusätzliche Abbildung verzichtet. [Andreas
Riedo, 2008].
43
3 Zusammenfassung - Angewandte Methoden
Distanzbestimmung zu M3
Die Distanzbestimmung zu Messier 3 mit Hilfe von RR-Lyrae Sternen in Verbindung mit
einer statistischen Auswertung hat sich mit den erhaltenen Resultaten als sehr erfolgreich bewiesen. Nicht zuletzt ist dies auch der Methode der Differentiellen Photometrie zuzuschreiben,
mit der, wenn man die Resultate betrachtet, man sehr genaue Sternhelligkeiten messen konnte. Es muss jedoch an dieser Stelle erwähnt werden, dass diese Methode nicht hätte verwendet
werden können, wenn keine Vergleichssterne vorhanden gewesen wären.
Distanzbestimmung zu M44
Die erhaltenen Resultate der Distanzbestimmung zu M44 sind wegen den grossen Ungenauigkeiten ernüchternd. Durch die ungenaue Bestimmung der Transformationskoeffizienten, welche
für die Umrechnung auf Standard (B − V ) nötig waren und folglich auch für die Bestimmung
von V , war es im Endeffekt nicht möglich, präzisere Distanzresultate angeben zu können. In
diesem Sinne wäre es von Vorteil im Vorfeld die für die Umrechnung auf Standardmagnituden
benötigten Koeffizienten (siehe Gl. 1.6), als unabhängiges Projekt bestmöglich zu bestimmen. Mit grosser Wahrscheinlichkeit sind die Messungen im B-Filter nicht korrekt. Unter
Umständen weicht das instrumentelle B-Passband zu stark vom Standardpassband ab.
Die Durchführung eines Main-Sequence Fittings ist aber eine wichtige Methode für die Distanzbestimmung. Zu bemerken ist jedoch, dass die Bestimmung der Hauptreihen sich nicht
als sehr einfach erweist - einige hundertstel Magnituden Unterschied führen schon zu einigen
Parsecs!
Fazit
Sind genaue Transformationskoeffizienten bekannt, so wären die Methoden der Differentiellen und der All Sky Photometrie mehr oder weniger ebenbürtig. Ist dies nicht der Fall und
sind in der Nähe des betrachteten Objektes zusätzlich noch Vergleichssterne vorhanden, so ist
in diesem Falle die Differentielle Photometrie vorzuziehen.
Da die Voraussetzungen für die jeweiligen Distanzbestimmungsmethoden verschieden sind,
kann ein in Vergleich zwischen der Distanzbestimmung mit Hilfe von RR-Lyrae Sternen und
einem Main-Sequence Fitting nicht ohne Weiteres gegeben werden.
44
4 Dank
An dieser Stelle möchte ich mich für die grossartige Unterstützung von den Herren Thomas
Schildknecht, Martin Ploner und Reto Musci bedanken. Oft gab es kleinere Hürden, welche
jedoch mit ihrer Mithilfe gemeistert werden konnten. Durch sie ist mir ein erster, grosser und
wichtiger Einblick für spätere Arbeiten eines Physikers gewährt worden. Dafür möchte ich
mich bei ihnen herzlich bedanken.
45
Literaturverzeichnis
AAVSO. CCD observing manual. http://www.aavso.org, 2008.
Richard Berry and James Burnell. The Handbook of Astronomical Image Processing.
Willmann-Bell, Inc., second english edition, 2005.
R. Buonanno, C. E Corsi, et al. The stellar population of the globular cluster M3;
I.Photographic photometry of 10000 stars. Astronomy and Astrophysics, 290:69–103, 1994.
C. Cacciari, T. M. Corwin, and B. W.Carney. A multicolor and fourier study of RR Lyrae
variables in the globular cluster NGC 5272 (M3). The Astronomical Journal, (129):267 –
302, 2005.
B. W. Carney. The ages and distances of eight globular clusters. The Astrophysical Journal
Supplement Series, 42:481–500, 1980.
B. W. Carney and W. E. Harris. Star Clusters. Springer-Verlag Berlin Heidelberg, 2001.
Werner Gurtner. Mathematische und numerische Methoden der Physik - Parameterbestimmung. Astronomisches Institut Universität Bern, 2007.
K. Kolenberg. New approches to solve the old Blazhko puzzle in RR Lyrae Stars. International
Astronomical Union, (224), 2004.
Arlo U. Landolt. UBV photoelectric sequences in the celestial equatorial selected areas 92-115.
The Astronomical Journal, 78(9), 1973.
Arlo U. Landolt. UBVRI Photometric Standard Stars Around The Celestial Equator. The
Astronomical Journal, 88(88), 1983.
Arlo U. Landolt. UBVRI Photometric Standard Stars In The Magnitude Range 11.5 < V <
16.0 Around The Celestial Equator. The Astronomical Journal, 104(1), 1992.
A. J. Longmore et al. Globular cluster distances from RR Lyrae log(period)-infrared magnitude relation. Monthly Notices of the Royal Astronomical Society, 247:684–695, 1990.
Axel Martin and Karolin Kleemann-Böker. CCD Astronomie in 5 Schritten. Oculum Verlag
Ronald Stoyan, Erlangen, 2004.
NASA. http://www.nasa.gov/.
S. M. Percial, M. Salaris, and D. Kilkenny. The open cluster distance scale - A new empirical
approach. Astronomy and Astrophysics, 400:541–552, 2003.
Marc H. Pinsonneault, John Stauffer, et al. The problem of hipparcos distances to open
clusters I. constraints from multicolor main-sequence fitting. The Astrophysical Journal,
504:170–191, 1998.
46
Literaturverzeichnis
Allan Sandage and Carla Cacciari. The absolute magnitudes of RR Lyrae stars and the age
of the galactic globular cluster system. The Astrophysical Journal, 350:645–661, 1990.
Helmut Scheffler and Hans Elsässer. Bau und Physik der Galaxis. B.I.-Wissenschaftsverlag,
1982.
Thomas Schildknecht. Cosmic Distance Scales - Die Vermessung des Kosmos. Astronomisches
Institut Universität Bern, 2007.
Linda Sparke and John Gallahger. Galaxies in the Universe - An Introduction. Cambridge
University Press, zweite auflage edition, 2007.
B. J. Taylor. The benchmark cluster reddening project I. Reddening values for the hyades,
coma, and praesepe. The Astronomical Journal, 132:2453–2468, 2006.
Charles Trefzger. Galaxien. Astronomisches Institut Universität Bern, 2008.
Albrecht Unsöld and Bodo Bascheck. Der neue Kosmos. Springer-Verlag Berlin Heidelberg
New York, siebte auflage edition, 2005.
47
Abbildungsverzeichnis
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
1.10
1.11
1.12
1.13
Pleiaden, Doppelsternhaufen h und χ Persei - [NASA] . . . . . . . . . . . . . .
Verteilung offener Sternhaufen - [Unsöld and Bascheck, 2005] . . . . . . . . . .
Dunkelwolke Kohlensack“ - [Unsöld and Bascheck, 2005] . . . . . . . . . . . .
”
Verteilung Kugelsternhaufen - [Trefzger, 2008] . . . . . . . . . . . . . . . . . . .
M80 - [NASA] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Typen von veränderlichen Sternen - [Unsöld and Bascheck, 2005] . . . . . . . .
RR-Lyrae Lücke im Farben-Helligkeits-Diagramm - [Scheffler and Elsässer, 1982]
RRab und RRc im log(P ) vs. A Diagramm - [Carney and Harris, 2001] . . . . .
Selected Area SA101 - [Landolt, 1992] . . . . . . . . . . . . . . . . . . . . . . .
Bias Aufnahme - [Andreas Riedo, 2008] . . . . . . . . . . . . . . . . . . . . . .
Dark Aufnahme - [Andreas Riedo, 2008] . . . . . . . . . . . . . . . . . . . . . .
Flatfield Aufnahmen - [Andreas Riedo, 2008] . . . . . . . . . . . . . . . . . . .
Jährliche Parallaxe (links) und Parallaxenwinkel (rechts) - [Unsöld and Bascheck,
2005, Sparke and Gallahger, 2007] . . . . . . . . . . . . . . . . . . . . . . . . .
1.14 Stromparallaxe - [Unsöld and Bascheck, 2005] . . . . . . . . . . . . . . . . . . .
1.15 Schematische Darstellung eines Main Sequence Fittings im FHD - [Andreas
Riedo, 2008] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.16 FHD offener Sternhaufen - [Unsöld and Bascheck, 2005] . . . . . . . . . . . . .
5
6
7
7
8
9
10
11
16
17
18
19
2.1
2.2
30
2.3
2.4
2.5
2.6
2.7
2.8
2.9
2.10
2.11
2.12
2.13
2.14
48
Vergleichssterne und Fehlerverhalten - [Andreas Riedo, 2008] . . . . . . . . . .
Tv Bestimmung; Reduktionen: Bias, Dark, Flatfield, gemittelte Aufnahmen;
Software: MaxIm DL - [Andreas Riedo, 2008] . . . . . . . . . . . . . . . . . . .
Tv Bestimmung; Reduktionen: keine; Software: institutseigene - [Andreas Riedo,
2008] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tv Bestimmung; Reduktionen: Bias, Dark, Flatfiled, ungemittelte Aufnahmen;
Software: institutseigene - [Andreas Riedo, 2008] . . . . . . . . . . . . . . . . .
Experimentelle Bestimmung von Kv und Zv mit Tv = 0 - [Andreas Riedo, 2008]
Kv und Zv Bestimmung mit Tv = −0.09 - [Andreas Riedo, 2008] . . . . . . . .
Kv und Zv Bestimmung mit Tv = −0.15 - [Andreas Riedo, 2008] . . . . . . . .
Tbv Bestimmung; Reduktionen: Bias, Dark, Flatfield, gemittelte Aufnahmen;
Software: MaxIm DL - [Andreas Riedo, 2008] . . . . . . . . . . . . . . . . . . .
Tbv Bestimmung; Reduktionen: keine; Software: institutseigene - [Andreas Riedo,
2008] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Kbv und Zbv Bestimmung mit Tbv = 0.91 - [Andreas Riedo, 2008] . . . . . . . .
Kb und Zb Bestimmung mit Tb = 0.11 - [Andreas Riedo, 2008] . . . . . . . . . .
Kbv und Zbv Bestimmung mit Tbv = 1.8 - [Andreas Riedo, 2008] . . . . . . . . .
Main-Sequence Fitting mit 1.Set Transformationskoeffizienten - [Andreas Riedo,
2008] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Main-Sequence Fitting mit 2.Set Transformationskoeffizienten - [Andreas Riedo,
2008] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
20
21
24
25
32
33
33
35
35
36
37
37
38
38
39
42
43
Anhang A
Ausgleichungsverfahren für Distanzbestimmung von M3
Wie in Kap. 1.3.1 auf S.12 diskutiert, werden die gesuchten Helligkeiten der RR-Lyrae Sterne
mit Hilfe des kurz beschriebenen Ausgleichungsmodells berechnet. Im vorliegenden Fall hat
man es mit einer bedingten Ausgleichung mit unbekannten Parametern - hier C - zu tun. Um
den Programmcode auf der beiliegenden DVD und die im Kap. 1.3.1 beschriebene Theorie
besser zu verstehen, sollen hier die wichtigsten Schritte des Verfahrens aufgeführt und diskutiert werden.
Nach Kap. 1.3.1 liegt dem Modell die Gleichung
Ci,Katalog = Ci,M essung + C
(A.1)
zu Grunde, wobei C der gesuchte Parameter und Ci,M essungen mit i = 1 . . . , n die Messwerte der Vergleichssterne darstellen. Damit lassen sich die n Bedingungsgleichungen wie folgt
definieren:
C1,Katalog − C 1,M essung − C = 0
..
..
..
.
.
.
. = ..
(A.2)
Cn,Katalog − C n,M essung − C = 0.
Die Bedingungsgleichungen werden nun mit den Ausdrücken
C = C0 + δC;
C 1,M essung = C1,M essung + vi ;
(A.3)
linearisiert, wobei C0 ein Näherungswert und die vi die Fehler der Messungen darstellen. Somit
erhält man folgendes System
−vi + δC −Ci,M essung + Ci,Katalog − C0 = 0
{z
}
|
(A.4)
wi
welches man nun in folgende Matrixform übersetzten kann
B·v+A·x+w =0
(A.5)
mit
49
Anhang A Ausgleichungsverfahren für Distanzbestimmung von M3
11
.
..
B =
A = ... , |{z}
x = δC,
, |{z}
|{z}
r.n
r.u
u.1
0
−1nn
1r
v1
−C1,M essung + C1,Katalog − C0
..
.
.
v =.
w =
, |{z}
.
|{z}
n.1
r.1
vr
−Cr,M essung + Cr,Katalog − C0
−111
0
(A.6)
wobei n = Anzahl gemessener Vergleichssterne, u: Anzahl Unbekannte (hier u = 1) und r:
Anzahl Bedingungen zwischen den Unbekannten (hier r = n) darstellen. Mit der Implementierung der obigen Matrizen in den Programmcode ist die meiste Arbeit nun vollbracht. Mit
den Ausdrücken nach [Gurtner, 2007]
x = − AT (BQB T )−1 A AT (BQB T )−1 w;
Korrektur δC zum Näherungswert C0
T
T −1
Qxx = A (BQB ) A ;
Kofaktorenmatrix der Unbekannten C
s
vT P v
m0 =
;
Mittlerer Fehler der Gewichtseinheit a posteriori
r−u
p
mc = m0 · Qxx ;
mittlerer Fehler von C
(A.7)
können nun die gesuchten Unbekannte C und deren mittleren Fehler mc berechnet werden.
Sind diese bekannt, so ist man in der Lage die gesuchten visuellen Helligkeiten der RR-Lyrae
Sterne zu berechnen, indem man zu den gemessenen Werten Vi,M essung den Wert C = C0 +δC
und den mittleren Fehler mc hinzuaddiert, resp.
Vi = Vi,M essung + C ± mc .
(A.8)
Verwendet man zudem die korrekten“ Vergleichssterne (siehe Kommentar zu Vergleichsster”
nen auf S.29), lassen sich die Vi mit dem berechneten, mittleren Fehler mc korrekt komplettieren.
50