Praktikum Mikrotechnik - mimed - Technische Universität München
Werbung

Praktikum Mikrotechnik
Lehrstuhl für Mikrotechnik und
Medizingerätetechnik
o. Prof. Dr. Tim C. Lüth
Version 2.5, Stand 11.05.2011
Technische Universität München • Lehrstuhl für Mikrotechnik und Medizingerätetechnik (Leitung: o. Prof. Dr. Tim C. Lüth)
Boltzmannstraße 15 • D-85748 Garching bei München • Tel: 089-289-15191 • Fax: 089-289-15192 • www.mimed.de
Referentin: Frau Barbara Govetto, M.A. (LMU) • Sekretariat: Renate Heuser (Tel: 089-289-15190)
Inhalt
Praktikum Mikrotechnik
Inhalt:
Allgemeines:
Beschreibung zum Praktikumsablauf
I - II
Versuche:
1.
Piezoaktoren
PIE 1 – PIE 14
2.
Ansteuerung einer kapazitiven Last
TRA 1 – TRA 18
3.
Regelungstechnik mit dem Operationsverstärker
OP 1 – OP 17
4.
Untersuchung verschiedener Führungskonzepte
FK 1 – FK 17
5.
Motorkonzepte
MOT 1 – MOT 24
6.
Ansteuerung mit dem Mikrokontroller
MIK 1 – MIK 39
Auszug aus Datenblättern ATmega32(L)
7.
Mikroskopie
OPT 1 – OPT 13
8.
Analog–Digital-Wandlung
AD 1 – AD 18
9.
Projektoren
FD 1 – FD 8
10.
Analoge Längenmessung mit dem Photosensor
LM 1 – LM 11
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Praktikumsablauf
Ablauf des Mikrotechnikpraktikums
Daniel Günther überarbeitet von Thomas Ottnad
1. Zum Inhalt
Mikrotechnik stellt bzgl. der angewandten Messmittel eine besondere Herausforderung dar.
Die Dimensionen der Funktionsstrukturen liegen in den Größenordnungen der Toleranzen
von Bauteilen des allgemeinen Maschinenbaus. Diese Anforderungen schlagen sich in den
besonderen Aufbauten und Messmethoden mikrotechnischer Geräte nieder. Das Praktikum
„Mikrotechnik“ soll den Stoff der Vorlesungen „Mikrotechnische Sensoren und Aktoren“ sowie
„Mechatronische Gerätetechnik“ (früher „Feingerätebau“) veranschaulichen und vertiefen.
Dabei ist der interdisziplinäre Ansatz von besonderer Bedeutung. Nur mit Hilfe der
Kombination von Mikromechanik, Elektronik und den Konstruktionsprinzipien des
Feingerätebaus können echte Mikrosysteme realisiert werden.
Ziel des Praktikums ist es, den Studenten Fähigkeiten zu vermitteln, welche sie direkt beim
Aufbau mikrotechnischer Versuchsstände nutzen können. Die vermittelten Messmethoden
sind grundlegend für den Umgang mit mikro-elektromechanischen Systemen (engl. MEMS).
Das Praktikum hat dabei nicht zum Ziel, eine mikromechanische Funktionsstruktur zu
realisieren. Die Studenten lernen im Verlauf des Praktikums notwendige Bauteile für ein 3DWachsdruckgerät kennen. Bei diesem 3D-Wachsdruckgerät handelt sich um einen
Eindüsendruckkopf auf Basis eines piezoelektrischen Aktors.
Im Laufe des Praktikums werden die piezoelektrischen Grundlagen behandelt. Die
Ansteuerung eines piezoelektrischen Aktors wird in Form der Ansteuerung einer kapazitiven
Last vermittelt. Der Einsatz von Operationsverstärkern für eine einfache Temperaturregelung
bildet die Basis für den Betrieb eines 3D-Wachsdruckgeräts bei gewünschter Temperatur.
Unterschiedliche Antriebskonzepte und Führungen sowie Motorkonzepte werden untersucht,
die für eine Positionierung eines x-y-Tischs notwenig sind. Für die Echtzeitsteuerung des xy-Tisches wird ein Mikrocontroller programmiert. Ergänzende Versuche zur optischen
Analyse von mikroskopischen Gegebenheiten runden das Praktikum ab.
2 Ablauf
Das Praktikum umfasst insgesamt 6 Versuche. Ein Praktikumstag umfasst jeweils 3
Stunden.
Damit die Versuche sinnvoll und zügig ablaufen können, sollte sich der Praktikumsteilnehmer
auf den jeweiligen Versuch gut vorbereiten. Dazu ist es sinnvoll, das Skriptum mit dem
Versuch durchzulesen. Besonders sollten auch die praktischen Versuche vorher durchdacht
werden.
Das Praktikum wird jeweils mit einer Fragerunde zum Inhalt begonnen. Die Vorbereitung
wird durch den Assistenten bewertet. Zusätzlich dient diese Runde dazu, noch vorhandene
Fragen zu klären. Dabei werden auch die Hausaufgaben durchgegangen und bewertet.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
I
Praktikumsablauf
Die Durchführung des Versuchs selbst wird ebenso bewertet. Dabei sind zielgerichtetes
Vorgehen
und
eine
sinnvolle
Dokumentation
der
Versuchsergebnisse
die
Bewertungsgrundlagen.
Ingesamt gliedert sich die Bewertung wie folgt:
• Hausaufgabe und Fragerunde 1/3
• Durchführung 1/3
• Ausarbeitung/ Dokumentation 1/3
Ergebnis des Praktikums ist ein benoteter Schein (auf Wunsch auch unbenotet). Dieser kann
zwei Wochen nach Ablauf des Praktikums beim Praktikumsbetreuer abgeholt werden.
Die jeweiligen Termine sind in Form von Namenslisten und Gruppeneinteilungen im Internet
und als Aushang am Lehrstuhl zu finden. Die Anmeldezeiträume sind im Internet aufgeführt.
3. Einordnung
Das Praktikum kann ohne begleitende Vorlesungen besucht und absolviert werden. Das
Skriptum bietet hierzu alle notwendigen Informationen. Es vertieft den Stoff der Vorlesungen:
• Mechatronische Gerätetechnik (ehemals „Feingerätebau“)
• Mikrotechnische Sensoren und Aktoren
4. Version
Die vorliegende Ausführung ist die Version 2.5, Stand 11.05.2011
Viel Spaß und Erfolg beim Praktikum Mikrotechnik
II
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 1: Piezoaktoren
Beschreibung zu Versuch Nr. 1:
Piezoaktoren
Daniel Günther, Michele Nicoletti überarbeitet von Thomas Ottnad
1. Einordnung
1.1 Drucktechnik
Die Drucktechnik ist ein wichtiger Markt für die Mikrotechnik. Deshalb sollen in diesem
Praktikum grundlegende Vorgehensweisen und Verfahren der Mikrotechnik anhand eines
Druckers vermittelt werden. Dieser besteht aus einem x-y- Tisch und einem Druckkopf, der in
der Lage ist, heißes Wachs zu verdrucken. Mit einem solchem Aufbau können einfache 3DStrukturen realisiert werden.
Im Verlauf des Praktikums sollen alle wichtigen Bestandteile des Druckers untersucht
werden. Im Versuch Nr. 1 sollen die grundsätzlichen Eigenschaften von piezoelektrischen
Aktoren (kurz auch Piezoaktoren) gezeigt werden. Diese sollen als Aktoren später für den
Ausstoß von heißem Wachs sorgen.
1.2 Druckprinzip:
Der Tropfenausstoß eines Druckers wird dadurch erreicht, dass eine Flüssigkeitsmenge
durch eine kleine Düse gepresst wird. Besitzt der aus der Düse austretende Strahl eine
ausreichende kinetische Energie, kann sich ein Tropfen vom Druckkopf ablösen. Dabei gibt
es zwei grundsätzlich unterschiedliche Prinzipien: Das Continuous-Jet- und Drop-OnDemand- Verfahren.
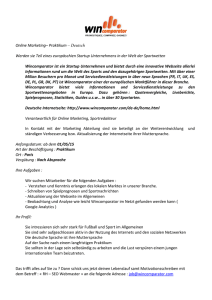
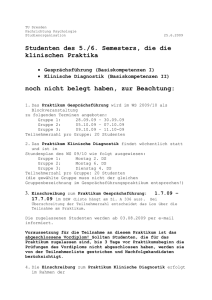
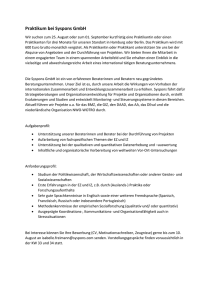
Das Continuous-Jet-Verfahren basiert darauf, durch statischen Überdruck einen
durchgehenden Flüssigkeitsstrahl durch die Düse zu pressen. Diesem Strahl wird eine
periodische Druck-Schwingung überlagert, die ihn in einzelne Tropfen zerfallen lässt. Die
vereinzelten Tropfen werden im Anschluss elektrisch aufgeladen. Eine Ablenkeinheit sorgt
dafür, dass nicht auf dem Papier benötigte Tropfen abgelenkt werden. Diese
Flüssigkeitsmenge wird in den Tintentank zurückgeführt. Bild 1 veranschaulicht das Prinzip.
Bild 1: Prinzip eines Continuous-Jet-Druckers
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
PIE 1
Versuch Nr. 1: Piezoaktoren
Beim Drop-On-Demand-Verfahren herrscht in der Düse, wenn kein Tropfenausstoß
stattfindet, ein geringer statischer Unterdruck. Dieser sorgt dafür, dass die Düsenöffnung
immer von Flüssigkeitsresten befreit wird. Die Kapillarwirkung des Düsenkanals steht mit
dem Unterdruck im Gleichgewicht und sorgt dafür, dass der Druckkopf nicht leer läuft. Wenn
ein Tropfen auf dem Papier oder Druckmedium benötigt wird, wird er On-Demand durch
einen Überdruckstoß erzeugt. Für dessen Erzeugung haben sich zwei Verfahren
durchgesetzt:
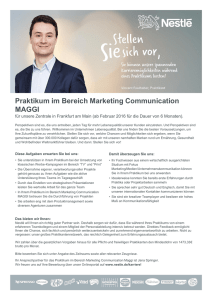
1
3
2
4
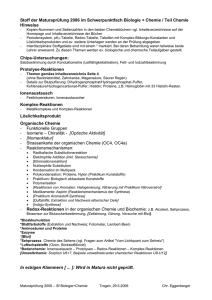
Bild 2: Momentaufnahme eines Bubble-Jet-Druckermodells in Aktion (links). Die vier Zustände
eines Druckers mit Pumpkammer (rechts): 1) Ruhe, 2) Ansaugen, 3) Kapillarisches Füllen,
4) Tropfenausstoß
Beim Bubble-Jet-Verfahren wird die Flüssigkeit durch eine Dampfblase unter Druck gesetzt.
Diese wird über einem kleinen elektrischen Heizwiderstand erzeugt. Die Dampfblase drückt
die Flüssigkeit aus der Düse. Im Anschluss füllt sich der Kanal wieder kapillarisch.
Vorraussetzung für dieses Verfahren ist eine Flüssigkeit mit ausgeprägtem Phasenwechsel.
Hierfür kommen nur Wasser bzw. wasserähnliche Fluide in Frage. Diese Festlegung der
Flüssigkeit schränkt das Bubble-Jet-Verfahren in seiner breiten Anwendung ein. Im
Officebereich besitzt dieses Verfahren aber eine dominante Stellung. Dies wird besonders
durch die gute Miniaturisierbarkeit der Heizwiderstände ermöglicht.
Die konkurrierenden Verfahren zeichnen sich dadurch aus, dass das Volumen einer
Pumpkammer durch einen Aktor verändert wird (Bild 2 rechts). Nach der Ruhelage (1) wird
das Kammervolumen vergrößert. Die Flüssigkeit wird dabei zum Teil aus dem
Vorratsbehälter (Kanäle nach links und rechts) und auch aus dem Düsenkanal gesogen (2).
Dieser füllt sich dann wieder durch die Kapillarkräfte (3). Wird die Kammer nun wieder auf
das Ausgangsvolumen verkleinert (4), kann ein Teil des Differenzvolumens als Tropfen
ausgestoßen werden. Als Aktoren für die Deformation kommen zahlreiche Prinzipen in
Frage. Bezüglich der möglichen Grenzfrequenz, also der Ausdruckgeschwindigkeit, zeigen
allerdings Piezoaktoren die günstigsten Eigenschaften.
PIE 2
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 1: Piezoaktoren
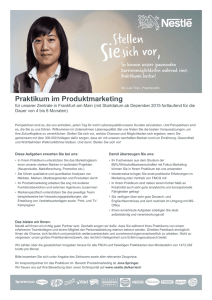
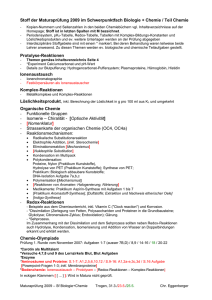
Bild 3: Pumpkammerdruckkopf, wie er im Praktikum verwendet wird.
Auch der im Praktikum verwendete Druckkopf wird mit einem Piezoaktor angetrieben. Der
Aktor ist dabei auf die passive Membran der Pumpkammer geklebt. Zusammen wirken die
beiden Materialien ähnlich wie ein Bimetall. Das Piezoelement zieht sich bei der elektrischen
Ansteuerung zusammen und drückt in die Kammer. Diese Bewegung bewirkt den
Tropfenausstoß. Der Zeitpunkt, an dem die Membran wieder entspannt wird, liegt am
günstigsten kurz vor der nächsten Aktion. Die Flüssigkeitssäule in der Düse kann auf diese
Weise „Schwung" holen. Die Tropfengeschwindigkeit und damit die Platziergenauigkeit der
„Pixel" wird dadurch stark erhöht.
Da die Verformungen des Piezoaktors auf dem Praktikumskopf im Bereich von wenigen
Nanometern liegen, werden im Praktikum stellvertretend sog. Stapelaktoren vermessen. An
ihnen wird das grundsätzliche Verhalten von Piezokeramiken untersucht. Zudem werden die
sensorischen Eigenschaften der Piezos dargestellt.
2. Theorie der Piezoaktoren
2.1 Allgemeines
Das Phänomen des piezoelektrischen Verhaltens von bestimmten Stoffen wurde zum ersten
Mal von Jaques und Pierre Curie beschrieben. Sie konnten als erste an einem Quarzkristall
feststellen, dass ein Potential entsteht, wenn man den Kristall mechanisch deformiert.
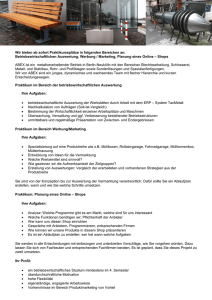
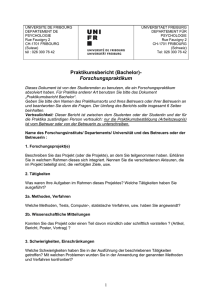
Zugrunde liegt hier eine Verschiebung der Ladungszentren. Auf Bild 4 ist ein Quarzkristall
dargestellt. Das Bild rechts oben und die beiden unteren Bilder zeigen zweidimensionale
Schematisierungen der eigentlich räumlichen Zusammenhänge.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
PIE 3
Versuch Nr. 1: Piezoaktoren
Bild 4: Quarz. Räumliche Darstellung (l. oben), Unbelastete Zelle (r. oben),
Ladungsverschiebung durch verschiedene mechanische Spannungen (unten).
Wirkt auf den Kristall eine Kraft, wird er deformiert. Dabei verschieben sich die einzelnen
Ladungen. Stellt man sich nun die Schwerpunkte der Einzelladungen vor, sieht man dass
sich ein Potential gebildet hat. Dieses Potential kann von außen als Spannung abgegriffen
werden. Der Piezokristall wirkt als Kraftsensor.
Vom inversen Piezoeffekt spricht man, wenn an die Keramik oder den Kristall eine Spannung
angelegt wird. Dabei verschiebt sich wieder der Ladungsschwerpunkt. Damit wird der Kristall
deformiert. Dieser Effekt lässt sich beim Aufbau von piezoelektrischen Aktoren nutzen.
Für praktische Anwendungen hat der Piezoeffekt bei Quarz eine geringe Bedeutung. Hierzu
werden speziell entwickelte Keramiken eingesetzt, die einen um Größenordungen
ausgeprägteren Piezoeffekt aufweisen. Als Hauptvertreter dieser Gruppe haben sich
Bariumtitanat und Blei-Zirkonat-Titanat (PZT) durchgesetzt.
Die Elementarzelle eines derartigen Kristalls ist Bild 4 zu entnehmen. Das zentrale Atom der
sogenannten Perovskit-Zelle ermöglicht den Effekt. Das zentrale Atom bildet nur in der
Elementarzelle ein Symmetrieelement, wenn der Stoff über seine sog. Curie-Temperatur
erhitzt wird (Siehe oben und analog zum Magnetfeld).
Fällt die Temperatur, so bildet die Elementarzelle keine volle Symmetrie mehr aus. Das
zentrale Atom kann in sechs verschiedene Raumrichtungen ausweichen. Damit ergibt sich
eine zufällige Polarisation der Elementarzellen. Würde man auf eine derartige Keramik
Elektroden aufbringen, würde sich kein Effekt bemerkbar machen.
PIE 4
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 1: Piezoaktoren
Bild 5: Blei-Zirkonat-Titanat. Die Elementarzelle wird bei Raumtemperatur durch das
Zentralatom deformiert (links). Rechts: oberhalb der Curietemperatur findet das Atom wieder
Platz (Zellengrößen nicht maßstäblich).
Wird die Keramik aber während des Abkühlens von einem elektrischen Feld durchflutet, so
bildet sich bei der Polarisation eine Vorzugsrichtung aus und die Keramik kann später als
Aktor genutzt werden. Der Effekt entsteht dadurch, dass nun eine Vorzugsrichtung der
einzelnen Elementarzellen entstanden ist. Wird nach diesem sogenannten Polarisieren
wieder ein Feld in Polarisationsrichtung angelegt, werden sämtliche Zentralatome in eine
Richtung ausgelenkt. Der Kristall dehnt sich in der Feldrichtung und verkürzt sich senkrecht
dazu. Ein weiterer Effekt kann beobachtet werden, wenn die Polarisationsrichtung und die
Richtung des Betriebsfeldes senkrecht zueinander stehen. Der Kristall wird dann um ein
gewissen Winkel deformiert. Der Effekt wird Schereffekt genannt. Der Piezoeffekt ist
aufgrund seiner Abhängigkeit von der Kristallgeometrie stark richtungsabhängig, diese
Abhängigkeit wird mit den Indizes i und j beschrieben. Die so genannten Bravais- MillerIndizes stammen aus der Kristallographie und orientieren sich an ein kartesisches
Koordinatensystem, in dem wie in Bild 6 (links) gezeigt definitionsgemäß die Z-Achse mit 3
die Y-Achse mit 2 und die X-Achse mit 1 bezeichnet wird. Zusätzlich werden die Rotationen
um die Z-Achse mit 6, um die Y-Achse mit 5 und um die X-Achse mit 4 bezeichnet. Wie in
Bild 6 (rechts) dargestellt, werden je nach Polarisations- und Translationsrichtung
verschiedene Teileffekte unterschieden und durch die Indizes markiert. Dabei orientiert sich
der Polarisationsvektor definitionsgemäß in Richtung der positiven Z-Achse. Wenn i die
Richtung des elektrischen Feldes angibt und j die der Auslenkung, ergeben sich folgende
Indizes für die verschiedenen Teileffekte:
•
•
•
33 für den Längseffekt
31 für den Quereffekt
15 für den Schereffekt
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
PIE 5
Versuch Nr. 1: Piezoaktoren
Bild 6: Darstellung der Bravais-Miller-Indizierung (links) und den dazugehörigen
Auslenkungseffekten Abhängig von der Polarisationsrichtung P (rechts)
Dabei werden in der Technik häufig der d33- und der d31-Effekt genutzt.
Das Verhalten von angelegtem Feld und mechanischer Deformation ist nichtlinear. Dieser
Umstand entsteht daraus, dass eine polykristalline Keramik unendlich viele
Kristallorientierungen besitzt. Deshalb findet selbst im Betrieb immer noch eine Polarisierung
statt, die den Effekt noch vergrößert. Sind aber alle Zentralatome orientiert tritt eine
Sättigung auf.
Der Polarisationseffekt bewirkt auch eine weitere wichtige Eigenschaft der Piezokeramiken:
Das Hystereseverhalten. Ähnlich wie bei magnetischen Phänomenen (z. B. Magnetostriktion)
geht bei Piezokeramik die Dehnung (oder Polarisation) nachdem eine Feldstärke kleiner der
Maximalfeldstärke eingestellt wurde nicht wieder vollständig zu ihrem Ausgangspunkt
zurück.
Die Bild 7 zeigt die so genannte Hysterese- und die Schmetterlingskurve. Auf der Abbildung
sind die wichtigsten Phasen für eine praktische Anwendung wiedergegeben.
Bild 7: Hysterese- (links) und Schmetterlingskurve (rechts).
PIE 6
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 1: Piezoaktoren
Der erste Schritt bei der Verwendung von Piezokeramiken ist die Polarisation. Bei diesem
Vorgang wird die Feldstärke bis in den Sättigungsbereich erhöht. Im Anschluss wird die
Spannung auf 0 V abgesenkt (Anlieferungszustand). Im Betrieb wird dann die Feldstärke
gemäß dem Anwendungsfall wieder erhöht (etwas niedriger als die Polarisationsfeldstärke).
Beschränkend für die Höhe des Feldes ist jeweilige Durchbruchsfeldstärke von Luft oder
Keramik. Den kleineren Kennwert in Luft kann man bei der Polarisation in einem Ölbad
umgehen. Die Durchbruchsfeldstärke der Keramik begrenzt den Einsatz der Keramik rigoros.
Die Nachpolarisation, die im Betriebsbereich stattfindet, ist auch für einen weiteren Effekt
verantwortlich. Die Keramik weist ein deutliches Zeitverhalten auf. Das heißt, dass die
Veränderung der Dehnung der Keramik nicht zu dem Zeitpunkt endet, an dem die Spannung
einen konstanten Wert erreicht. Der Graph auf Bild 8 veranschaulicht diesen Prozess.
Bild 8: Kriechverhalten von Piezos.
Die zentralen Gleichungen, die das Verhalten einer Keramik im Kleinsignalbetrieb
( ΔE << 0,5 ⋅ E Max ) darstellen, lauten wie folgt:
Der Ausdruck
Δl
= s1⋅2
Δ3
⋅ Δ3
σ + d12
E
l
mechanischerAnteil
elektrischerAnteil
beschreibt die Verformung des Kristalls in guter Näherung. Der mechanische Anteil der
Gleichung zeigt das Verhalten bei konstantem elektrischem Feld. Eine Änderung der
mechanischen Spannung Δσ bei konstantem Feld ΔE = 0 führt zu einer dem Faktor s =
1
E
(E hier für E-Modul) proportionalen Verformung des Aktors. Welches Potentialniveau am
Piezo anliegt, spielt dabei keine Rolle. Der zweite Teil der Gleichung beschreibt den
elektrischen Anteil der Dehnung. Auch hier ergibt sich wieder, unabhängig von der
konstanten mechanischen Belastung d. h. Δσ = 0 , eine proportionale Dehnung. Der Faktor
d muss zusätzlich indiziert werden: d ij . Hier steht i für die angelegte Feldrichtung. Der Index
j beschreibt die Richtung der Verformung. Es treten immer mehrere Verformungen
gleichzeitig auf, da der Piezoeffekt annähernd isochor ist. Diese Darstellung eignet sich
besonders für Abschätzungen des Verhaltens von Aktoren.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
PIE 7
Versuch Nr. 1: Piezoaktoren
Die Gleichung
D=
d12
⋅ Δ3
σ
mechanischerAnteil
+
ε12
⋅ Δ3
E
ElektrischerAnteil
beschreibt die dielektrische Verschiebung. Auch gibt es wieder zwei Anteile, aus der sich die
dielektrische Verschiebung zusammensetzt. Der mechanische Anteil ist hier besonders
geeignet, um Berechnungen für Sensoren durchzuführen.
Die Tabelle 1 gibt für die Praxis wesentliche Kennwerte unterschiedlicher Materialien wieder
(Richtwerte, Quarz nur zum Vergleich).
Tabelle 1: Kennwerte ausgewählter Materialien
ε T 33 / ε 0
Material
d33
d31
s33
s31
Einheit
10 −12 m / V
10 −12 m / V
10 −12 m 2 / N
10 −12 m 2 / N
10 −12 C / N
10 −12 C / N
190
-78
9,5
-2,9
1700
Bariumtitanat
85,6
-34,6
15,7
-5,24
168
PZT
315
-135
16,8
-6,2
1450
Quarz
-2,3 (d11)
2,3 (d12)
12,77 (s11)
-1,79 (s12)
4,52 (s11)
Bariumtitanat
polarisiert
Elektrisch verhält sich eine Piezokeramik wie ein Kondensator. Das heißt, dass bei
Belastung Ladungen getrennt werden und wie beim Kondensator eine abgreifbare Spannung
entsteht.
Die maximale Dehnung, die der Piezo als Aktor erreichen kann, ist durch die Gleichung für
Δl
beschrieben. Setzt man die Dehnung zu Null, gibt der Ausdruck eine Formel für die
l
Blockierkraft einer Piezokeramik wieder. Diese stellt für praktische Anwendungen eine
weitere wichtige Kenngröße dar.
2.2 Vergrößerung des Hubs eines Piezoelements
Um den geringen Hub von Piezoaktoren technisch besser nutzen zu können, gibt es
verschiedene Möglichkeiten, diesen stark zu vergrößern.
Die wichtigste besteht darin, ein Piezoelement nicht aus keramischen Vollmaterial
aufzubauen. Ein großer Piezoaktor wird dabei aus sehr dünnen Schichten
zusammengesetzt, die jeweils durch Elektroden getrennt sind. Dadurch wird die notwendige
Ansteuerspannung stark herabgesetzt und erreicht technisch sinnvoll nutzbare Dimensionen.
PIE 8
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 1: Piezoaktoren
Bild 9: Prinzip eines Stapelaktors.
Eine weitere Möglichkeit große Verformungen zu erhalten, ist der Aufbau einer sogenannten
mono- oder bimorphen Struktur. Dazu werden zwei Materialien miteinander verbunden. Eine
oder beide Materialen sind dabei Piezomaterial. Der Effekt verhält sich analog zu einem
Bimetall.
Bild 10: Bimorphe Anordnungen zweier Materialien..
Durch Hebelgetriebe können ebenfalls die Hübe vergrößert bzw. übersetzt werden. Bedingt
durch die Dimensionen müssen aber in den Gelenkpunkten Festkörpergelenke eingesetzt
werden. Damit können dann spielfreie Strukturen aufgebaut werden. Bild 11 zeigt eine
solche Festkörperstruktur und die Anwendung als Piezohebel.
Bild 11: Festkörpergelenke mit Stapelaktoren. Schema (rechts), Blechschnitt (links).
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
PIE 9
Versuch Nr. 1: Piezoaktoren
3 Ausprägungen im Versuch
Im Versuch können auf Grund der geringen Dehnungen von Piezovollmaterial nur Wege von
Aktoren vermessen werden, bei denen bereits Maßnahmen zur Wegvergrößerung getroffen
worden sind. Hier kommt ein Stapelaktor des Typs AN0X zum Einsatz, der mit einer Feder
(in Form eines Rohres) vorgespannt ist. Die Vorspannung spielt bei sehr schnellen
Bewegungen eine Rolle. Sie schützt die Keramik (auf Zug empfindlich!) vor dynamisch
erzeugten Zugspannungen beim Zusammenziehen des Aktors. In Bild 12 sind die
Bestandteile des Piezostapels dargestellt.
Bild 12: Baustufen eines Stapelaktors.
Die Tabelle 2 gibt wesentliche Daten dieses Stapelaktors wieder.
Tabelle 2: Kennwerte eines AN0X/8500b-Stapelaktors von EPCOS
Bezeichnung
AN0X/8500b EPCOS
Abmessungen
30x6,8x6,8 mm³
Piezostapel
Nennspannung
160 V
Kapazität
2,7 µF
Auslenkung bei 150V
40 µm
(ohne Gegenkraft)
Innenwiderstand
>100 MOhm
Steifigkeit
40 N/µm
Zusätzlich soll im Versuch die Eignung von Piezokeramik als Sensor untersucht werden.
Dazu wird Vollmaterial des Typs PIC 151 verwendet. Auf den Herstellerseiten können dazu
die in Tabelle 3 dargestellten Daten gefunden werden.
PIE 10
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 1: Piezoaktoren
Tabelle 3: Kennwerte für das Material PIC151
4 Hausaufgaben
1. Berechnen Sie die Ausdehnung einer quaderförmigen Keramik (1-Richtung: 15 mm, 2Richtung 12 mm und 3-Richtung 3 mm) vom Typ PIC 151 (Tabelle 3) in 3-Richtung bei einer
angelegten Spannung in 3-Richtung! Welche Verformung ergibt sich bei gleichem Feld (kein
Zahlenwert) in 1-Richtung? Auf die Keramik soll in beiden Fällen keine mechanische
Spannung wirken.
2. Erklären Sie anhand der Gleichung, warum ein Piezostapel die möglichen Dehnungen
stark vergrößert (bei gleicher elektrischen Spannung im Vergleich mit Vollmaterial)!
Δl
= s1⋅2
Δ3
σ + d12
⋅ Δ3
E
l
mechanischerAnteil
elektrischerAnteil
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
PIE 11
Versuch Nr. 1: Piezoaktoren
3. Ermitteln Sie die Blockierkraft des Piezostapelaktors (Tabelle 2) bei 150 V! Fertigen Sie
dazu ein Diagramm an, bei dem der Piezohub über die Kraft aufgezeichnet ist. Zeichnen sie
zusätzlich Kennlinien für 75 V und 50 V ein!
4. Der Piezostapelaktor ist bei 150 V mit 500N belastet. Berechnen Sie die Längenänderung
des Piezostapel, wenn die Spannung plötzlich um 50V verringert wird!
5. Die Entladung eines Kondensators über einen Widerstand (hier die Messeinrichtung mit
einem Megaohm) gehorcht folgendem Gesetz:
U C (t ) = U 0 ⋅ e
−
t
R ⋅C
.
Berechnen Sie für die Kapazitäten C1=2,7 µF und C2=1 nF die Zeit, in der die Spannung am
Kondensator auf 90 % seiner Anfangsspannung (Anfangsladung!) abgesunken ist!
5 Praktikumsaufgaben:
Im diesem Versuchsteil des Praktikums sollen die Eigenschaften von Piezokeramiken
gezeigt werden. Dabei wird mit unbelasteten Piezostapeln begonnen, da diese bei niedrigen
Spannungen messbare Verformungen zeigen. Diese Aktoren werden im Anschluss unter
Belastung untersucht. Zusätzlich werden die Sensoreigenschaften von Piezokeramiken
gezeigt. Dafür werden eine Vollkeramik sowie ein Piezostapel verwendet. Den Abschluss
des Versuchs bildet die Diskussion von möglichen Einsatzgebieten von Piezoaktoren unter
Betrachtung von Stärken und Schwächen sowie Kompensationsmöglichkeiten.
1. Vermessen von Piezostacks
Im Folgenden soll die Großsignalkennlinie des Piezoaktors mit der Bezeichnung AN0X
bestimmt werden:
a)
PIE 12
Bringen Sie die Messuhr in Position, um den freistehenden Stapelaktor zu
untersuchen und fixieren Sie sie. Schließen sie den Piezo und das Digitalmultimeter
an.
Nehmen Sie die Kennlinie für den Piezostapel nach folgender Anleitung auf:
Drehen Sie die Spannung am Piezo auf 0 V zurück. Nach jeder
Spannungsänderung muss mindestens zwanzig Sekunden gewartet werden,
bis der Messwert abgelesen wird (Warum ist das nötig?)
Ändern Sie die Spannung von 0 V bis 160 V in 20 V - Schritten und notieren
Sie die Messwerte. Achten Sie dabei darauf, die Spannung immer nur in eine
Richtung zu verändern.
Drehen Sie anschließend die Spannung in 20 V - Schritten wieder herunter
(ausgehend von 160 V bis 0 V) und halten Sie die Messwerte fest.
Zeichnen Sie ein Diagramm, das das Hystereseverhalten wiedergibt. Benutzen Sie
eine sinnvolle Skalierung. Charakterisieren Sie die Hysterese durch geeignete
Kennzahlen.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 1: Piezoaktoren
b)
Um die Messung zu verbessern, soll nun ein Hebelgetriebe zum Einsatz kommen.
Schließen Sie nun den Piezo unter dem Hebelgetriebe an das Steckbrett an.
Nehmen Sie, wie oben beschrieben, die Piezoverformung für 20-V-Schritte in beiden
Richtungen (Spannungsänderungen) auf. Beachten Sie dabei zusätzlich Folgendes:
Die Werte müssen um die Getriebeübersetzung korrigiert werden (Rückrechnen auf
die Piezoverformung)
Tragen Sie die Daten in das gleiche Diagramm ein wie bei Versuch 1a).
2. Piezoaktoren unter Belastung
Im Folgenden soll der Fall untersucht werden, dass sich die Belastung des Piezos bei
gleichbleibendem Feld verändert
a)
Stellen Sie eine Spannung von 20 V am Piezo ein. Belasten Sie den Piezo mit jeweils
20, 40, 60, 80 und 100 N. Tragen Sie die Verformungen in ein Diagramm ein.
Messen Sie nun in 20 N von 100 N abwärts die Verformungen und tragen sie diese
Werte wieder in das Diagramm ein. Interpretieren Sie die Ergebnisse.
b)
Nehmen Sie nach obiger Messung auch für 40, 60, 80, 100 V die Verformungen
durch die Belastungen 20, 40, 60, 80 und 100 N auf. Tragen Sie alle Daten in einem
separaten Diagramm zusammen und zeichnen Sie Linien mit konstanter Spannung
ein. Achten Sie dabei auf einen sinnvollen Nullpunkt für die Verformungen.
Entsprechen die extrapolierten Kennwerte: Dehnung unbelastet bei 150 V und
Blockierkraft Ihren Erwartungen?
3 Piezokeramik als Sensor
Im folgenden Versuch soll die Eignung von Piezokeramiken als Sensoren untersucht
werden. Hierzu wird der direkte Piezoeffekt genutzt.
a)
Stecken Sie den Piezostapelaktor aus Versuch Nr. 2 an das Steckbrett. Verbinden
Sie die Klemmen mit dem Oszilloskop. Berühren Sie den Stapelaktor mit den Fingern
und betrachten Sie eine Minute lang den Spannungsverlauf. Welche Erklärungen
kann es für dieses Phänomen geben?
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
PIE 13
Versuch Nr. 1: Piezoaktoren
b)
Lassen Sie den Stapelaktor auf Raumtemperatur abkühlen!
Nehmen Sie während dessen das Piezovollmaterial und stellen es unter die
Belastungseinrichtung. Belasten Sie das Material und beobachten Sie den
Spannungsverlauf. Führen Sie den Vorgang mehrfach durch. Welche Beobachtungen
können Sie dabei machen?
c)
Stellen Sie nun wieder den Stapelaktor unter die Belastungseinrichtung. Belasten Sie
mit 50 N. Beobachten Sie drei Minuten den Spannungsverlauf. Welche Beobachtung
machen Sie und was bedeutet das für eine statische Spannungsmessung?
d)
Führen Sie den gleichen Versuch (3c) nun mit dem Piezovollmaterial durch. Welche
Gemeinsamkeiten und Unterschiede können Sie beobachten? Finden Sie eine
Erklärung hierfür.
6 Literatur
•
Vorlesungsskriptum „Mikrotechnische Sensoren und Aktoren“, Lehrstuhl für
Mikrotechnik und Medizingerätetechnik, Prof. T. Lüth, 2006, TUM München
•
Vorlesungsskriptum „Feingerätebau“, Lehrstuhl für Mikrotechnik und
Medizingerätetechnik, Prof. T. Lüth, 2006, TUM München
•
Vorlesungsskriptum „Feinmesstechnik 2“, Lehrstuhl für Mikrotechnik und
Medizingerätetechnik, Prof. T. Lüth, 2006, TUM München
•
„Piezofibel“, Piezosystem Jena GmbH,
www.piezojena.com
•
www.piceramics.de
•
www.efunda.com
PIE 14
(Produkte & Leistungen→Download→Theorie )
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 2: Transistoren
Beschreibung zu Versuch Nr. 2:
Ansteuerung einer kapazitiven Last
Johannes Rucha, überarbeitet von Oliver Keßling
Bitte beachten Sie 4. Hausaufgaben
1. Einordnung
Der Praktikumsdruckkopf wird mit Piezokeramik angetrieben. Diese verhält sich im
Wesentlichen wie ein Kondensator. Um den Druckkopf möglichst schnelle Tropfenfolgen
erzeugen zu lassen, muss die Keramik schnell zwischen der Betriebsspannung und der
Masse hin- und hergeschalten werden. Diese Schaltvorgänge werden mit Transistoren
realisiert.
Im Praktikum sollen zuerst die Grundlagen erarbeitet werden. Dazu werden wichtige
Grundgrößen vermessen. In den weiterführenden Fragen des Versuchteils Nr.1 wird ein
Tiefsetzsteller behandelt. Dieser stellt ein besonders häufig verwendetes Bauteil dar, da mit
ihm Spannungen auf sehr verlustarme Weise reduziert werden können und damit der
Aufgabe angepasst werden können.
Im zweiten Versuchsteil werden dann Schaltungen untersucht die in der Lage sind den
Druckkopf ausreichend schnell anzusteuern. Diese werden messtechnisch untersucht und
auf die Eignung für das vorgegebene Problem geprüft.
2. Theorie
Als Mechatronik bezeichnet man die integrierte Betrachtung eines Systems in Mechanik,
Elektronik und Software. Diese Elektronik stellt damit das Bindeglied zwischen Steuerung
und eigentlicher Maschine (Aktoren, Sensoren, „Rest“). In diesen Elektroniken stellt sich
immer wieder die Aufgabe mit unter große Lasten wie etwa Motoren, Scheinwerfer oder
ähnliches mit Leistung bis in den kW-Bereich durch z.B. Mikrocontroller zu steuern. Das
Problem stellt sich dadurch, dass die steuernden Elemente Mikrocontroller oder Logikgatter
nicht in der Lage sind, nennenswerte Ströme zu liefern. Diese belaufen sich üblicherweise
auf wenige mA zugleich sind die verfügbaren Spannungen auf die Betriebsspannung der
Logikschaltkreise begrenzt (typisch 3V<Vcc<15V). Die Leistungen die sich dadurch ergeben,
reichen kaum um die Spule in einem Relais zu betreiben. Es sind daher unbedingt
verstärkende (aktive) Elemente notwendig. Die wichtigste Bauteilgruppe innerhalb dieser
„Verstärker“ stellt der Transistor dar.
Die ersten Patente zum Prinzip des Transistors wurden von Julius Edgar Lilienfeld in
Deutschland 1928 angemeldet. Bis zur endgültigen Fertigung eines Transistors vergingen
jedoch noch einige Jahre: Die Erfindung des ersten funktionierenden Transistors wird auf
Dezember 1947 in den Bell Laboratories datiert. Beteiligt an der Erfindung waren William B.
Shockley, John Bardeen und Walter Brattain, die 1956 den Nobelpreis dafür erhielten. In den
1950er Jahren gab es einen Wettlauf zwischen Röhre und Transistor, in dessen Verlauf die
Chancen des Transistors gelegentlich eher skeptisch beurteilt wurden.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
TRA 1
Versuch Nr. 2: Transistoren
Zuerst wurden Transistoren aus Germanium hergestellt und ähnlich wie Röhren in winzige
Glasröhrchen eingeschmolzen. Das Germanium wurde später durch Silizium ersetzt. Es
werden auch Mischmaterialien benutzt, diese sind aber seltener vertreten.
Wenn man alle Transistoren in sämtlichen bislang hergestellten Schaltkreisen
(Arbeitsspeicher, Prozessoren usw.) zusammenzählt, ist der Transistor inzwischen diejenige
technische Funktionseinheit, die von der Menschheit in den höchsten Gesamtstückzahlen
produziert wurde. Laut Gordon Moore, dem Mitbegründer der Firma Intel, wurde allein im
Jahr 2002 eine Trillion produziert.
Diskrete (daher nicht in ICs integrierte) Transistoren lassen sich entsprechend ihrer Bauart
und ihrer Eignung in verschiedene Gruppen und Klassen einteilen.
2.1 Wichtige Transistorbauformen
Bipolartransistoren sind die „klassische“ Bauform von Transistoren. Ihr interner Aufbau ist
in Abbildung 1 schematisch dargestellt. Allen Bipolartransistoren ist gemeinsam, dass ein
Basisstrom Ib den Kollektorstrom Ic steuert. Im linearen Bereich folgt Ic dem Zusammenhang:
I C= β ⋅ I B
Der Faktor ß wird dabei als Stromverstärkung bezeichnet. Typische Werte sind: 20 < β <
500.
Bild 1: Schaltzeichen und Diodenersatzschaltbilder
TRA 2
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 2: Transistoren
Bild 2: Aufbau eines Halbleiterplättchens mit Epitaxal-Einzeltransistor.
Soll ein Verbraucher „nur“ ganz ein oder ganz aus geschaltet werden, wird in die Basis soviel
Strom eingeleitet, dass IC nicht mehr durch den Transistor selbst sondern durch den
Verbraucher (im allg. die externe Beschaltung) begrenzt wird. Man spricht dann vom
Sättigungsbereich in dem der Transistor betrieben wird. Der hierfür notwendige Basisstrom
kann wie folgt abgeschätzt werden:
IB > 2⋅
1
β
⋅ IC
Die Basis wird also bildlich gesprochen mit Strom „übersättigt“. Die Spannung die dabei an
der Basis gegen den Ermitter anliegen muss damit dieser Strom fließt, beträgt ca. 0,7 V bei
Siliziumtransistoren. Daraus ergeben sich abhängig vom eingesetzten Transistor zum Teil
erhebliche Steuerleistungen. Darlington-Transistoren („Kaskadierte Bipolartransistoren“)
bieten hier gewisse Vorteile, die jedoch an anderer Stelle (höhere Sättigungsspannung)
erkauft werden müssen.
Feldeffekttransistoren (unipolare Transistoren)
Historisch gesehen ist das Funktionsprinzip des MOSFETs wesentlich länger bekannt als
das des Bipolartransistors. Die ersten Patentanmeldungen stammen aus den Jahren 1926
(von Julius Edgar Lilienfeld) und 1934 (Oskar Heil). Die ersten MOSFETs wurden allerdings
erst 1960 gefertigt, als mit dem Silizium/Siliziumdioxid ein Materialsystem zur Verfügung
stand, mit dem sich eine reproduzierbar gute Halbleiter-Isolator-Grenzfläche herstellen ließ.
Damit verbunden war die Abkehr vom Germanium als Basismaterial und steigende
Anforderungen an die Fertigungsbedingungen (Reinräume, strenge Temperaturregime).
Ein großer Vorteil von FETs gegenüber Bipolartransistoren ist ihr positiver Temp. Koeffizient
im Ohmschen Bereich (siehe unten) dadurch wird es möglich bei Bedarf mehrere FETs
parallel zu schalten (Gate auf Gate, Source auf Source,....) um einen Transistor größerer
Leistungsfähigkeit zu erhalten.
Wie auch beim Bipolartransistor gibt es zwei komplementäre Bauformen: N-Kanal-MOSFET
und P-Kanal-MOSFET. Diese können jeweils noch in selbstsperrende (enhancement
transistor, „Anreicherungstyp“) und selbstleitende (depletion transistor, „Verarmungstyp“)
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
TRA 3
Versuch Nr. 2: Transistoren
Bauformen unterschieden werden. Außerdem gibt es auch noch den sogenannten JFET
(Unijunctionstransistor), bei dem ein PN- Übergang in Sperrrichtung die Isolation der
Gateelektrode zum Kanal übernimmt.
Der wichtigste Unterschied zwischen enhancement und depletion Typ ist das Vorzeichen der
sog. Threshold Spannung (Threshold = Schwellenwert): Die Gate-Source-Spannung ab der
der Transistor leitfähig wird. In diesem Praktikum soll insbesondere die Anwendung der
wichtigsten Gruppe dieser Transistoren, der n-Kanal-MOSFET in seiner selbstsperrenden (=
enhancement transistor, „Anreicherungstyp“) Variante dargestellt werden.
Bild 3: Typen von Transistoren, sehr häufig wird der MOSFET, n-Kanal, Anreicherungstyp
eingesetzt.
MOSFET-Transistoren, wie der hier gezeigte n-Kanal Anreichungstyp werden mit den
üblichen Halbleitertechniken wie Lithographie und verschiedenen Aufbau und Ätztechniken
hergestellt. Auf Bild 4 ist der Schnitt durch einen auf einem p-Silizium Wafer aufgebrachten
Transistor gezeigt. Bei Power-MOSFETs wird der Bulkanschluss (=Substrat) üblicherweise
direkt im Gehäuse mit Source verbunden.
TRA 4
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Häufig verwendet
Versuch Nr. 2: Transistoren
Bild 4: MOSFET-Transistor im Schnittbild und als Schaltsymbol
Ein wichtiges Schaubild für MOSFET-Transistoren ist das Kennlinienfeld des Drainstromes
über der Drain-Source-Spannung. Mit diesem Schaubild kann man erkennen ob der
Transistor für die vorgegebene Aufgabe geeignet ist. Das bei Bipolartransistoren übliche
Schaubild der Eingangsdiode entfällt bei MOSFET-Transistoren. Die Gateelektrode wirkt
zusammen mit Source wie eine einfache Kapazität.
Ohmscher
Bereich
Sättigungs
Bereich
Bild 5: Typisches Kennlinienfeld eines MOSFET-Transistors
Das Übertragungsverhalten eines MOSFET lässt sich wie auch beim Bipolartransistor in 3
Bereiche aufteilen.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
TRA 5
Versuch Nr. 2: Transistoren
2.2 Betriebsbereiche
•
Sperrbereich:
Der Sperrbereich ist der Bereich in dem der Transistor keinen Strom leitet. Bedingung für
diesen Fall ist:
U GS < U th .
Mit Uth wird also diejenige Spannung bezeichnet, bei der der Transistor leitend wird. Bei
einem N-Kanal enhancement Typ (wie in unserem Praktikum) ist diese Spannung positiv
(normalerweise 1V < Uth < 5V). Bei einer Gate-Source-Spannung von UGS = 0V ist der
Transistor also im Sperrbereich. Daher auch das Attribut „selbstsperrend“. (Der depletion
Typ hat eine negative Thresholdspannung, ist daher bei 0V UGS schon leitfähig und wird
daher als selbstleitend bezeichnet.)
•
Sättigungsbereich:
Der Sättigungsbereich ist gegeben wenn U DS ≥ U GS − U th und U GS > U th ist. Für den
Drain-Strom ergibt sich folgende quadratischen Kennlinie:
2
I D = K ⋅ (U GS − U th ) .
2
Der sog. Steilheits- oder auch Transkonduktanzkoeffizient K lässt sich zwar theoretisch aus
den Halbleitermaterialparametern und der Transistorgeometrie errechnen, diese sind aber
normalerweise nicht angegeben. In der Praxis wird nur die Parabel graphisch im Datenblatt
abgebildet und Steigung der Kurve bei einem bestimmtem Drainstrom linearisiert angegeben
und meistens mit Transkonduktanz bezeichnet.
TRA 6
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 2: Transistoren
Bild 6: Kennlinie zur Transkonduktanz.
Die Kurve gibt vor allem an, welchen Strom der Transistor abhängig von der UGS überhaupt
leiten kann. Im Kennlinienfeld entspricht dies dem Teil rechts der grauen Parabel (die
waagerechten Kennlinienbereiche)
•
Ohmscher Bereich
Der Ohmsche Bereich, auch Trioden Gebiet genannt ist im Kennlinienfeld links der grauen
Parabel definiert. Der Transistor zeigt in diesem Bereich ein resistives Verhalten. Die
Kennlinien (für UGS = Konst.) sind wieder Parabeln die allerdings im Bereich des Ursprungs
sehr linear verlaufen. Für moderate Ströme und ausreichendes UGS kann also der DrainSource- Widerstand als ohmsch bezeichnet werden. Dabei ist zu beachten, dass er weiterhin
durch die Größe von UGS gesteuert werden kann.
2.3 Wichtige Parameter zur Auswahl von MOSFETs
Die wichtigsten Parameter zu einem Transistor finden sich meist direkt auf der 1. oder 2.
Seite des Datenblattes. Die Datenblätter können im allg. schnell über beispielsweise
„Google“ im Internet unter Eingabe des Bauteilnamens gefunden werden.
• RDson
Werden MOSFETs als Schalter verwendet so werden sie im Ohmschen Bereich
betrieben. Mit dem RDson kann errechnet werden, welche Verlustleistung am Transistor im
Betrieb abfallen wird.
• UDS
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
TRA 7
Versuch Nr. 2: Transistoren
Gibt die maximal zulässige Sperrspannung zwischen Drain und Source an. Diese
Spannung sollte im allgemeinen mind. 50% über der vorgesehenen Betriebsspannung
liegen.
• UGS
Spannungsfestigkeit des Gate-Source-Isolationsmaterial. Größere Spannungen
zerstören diese Schicht und damit den Transistor. Wichtig für die Auslegung der
Treiberschaltung.
• ID
In den Datenblättern werden an verschiedener Stelle Drainströme angegeben. Diese
beziehen sich jeweils auf bestimmte Zusatzbedingungen (Peak pulsed, bei Temp.= 25°C,
100°C, 125°C...) Auch der Wert der als Continous ID angegeben wird setzt eine
ausreichende Kühlung des Transistors voraus. Dieser Wert kann aber schon mal als
grobe Orientierung bei der Auswahl dienen.
• Uth
Steht meist erst auf der zweiten Seite und wird meist mit minimal, typisch und maximal
Wert angegeben.
• Package
Obwohl die Gehäuse standardisiert sind wird meist auf den letzten Seiten des
Datenblattes noch eine Maßzeichnung des verwendeten Gehäuses abgedruckt. Es gibt
eine große Auswahl an Gehäusen für Transistoren die für die verschiedenen
Einsatzzwecke optimiert sind: kleine, große, flache,... Sie unterscheiden sich (im Bereich
der Powertransistoren) vor allem in der Verlustleistung die der Transistor darin an die
Umgebung abgeben kann und ob ein Kühlkörper angeschlossen werden kann.
Besonders wichtig ist auch die Anschlussbelegung des einzelnen Transistors, da diese
nicht einheitlich ist. So ist nicht immer das Gate am selben Anschlussbeinchen.
Häufig verwendet wird für Power MOSFETs das Gehäuse TO220 das auch in unserem
Praktikum zum Einsatz kommt.
• Ptot:
Bezieht sich wieder auf eine bestimmte Kühlung (hier: besonders gute Kühlung) und ist
daher nicht besonders relevant. Wichtiger ist:
• Operating Temperature:
In welchem Temperaturbereich kann der FET betrieben werden. Die Angabe bezieht sich
immer auf den Chip selbst. Die für unseren Versuch wichtige obere Temperatur liegt bei
MOSFET’s im allgemeinen bei 125°C bis 150°C .
• Thermal resistance, chip case oder chip ambiant
Wärmeübergangswiderstand vom Chip zum Gehäuse außen und gegenüber der
Umgebung. Der erste Wert ist für Kühlkörpermontage relevant.
ϑchip = ϑumgebung + ( Rth1 + Rth 2 + ...) • Ptot ;
Diese Wärmewiderstände sind extrem abhängig von der Einbaulage und anderen
Einflussfaktoren. Die Berechnung der Chiptemperatur ist mit dieser einfachen Methode
nicht besondere genau. Es ist daher ratsam eine entsprechend vorsichtige Auslegung zu
wählen. (genauer wäre z.B. eine FEM-Simulation)
TRA 8
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 2: Transistoren
In verschiedenen Anwendungen kann es nötig werden, noch eine Vielzahl anderer
Parameter zu überprüfen, für „normale“ einfache Schaltaufgaben reichen die hier
angesprochenen Werte aus.
2.4 Vorgehen bei der Auswahl von MOSFET-Transistoren
Bei der Suche nach einem Transistor geht man im allgemeinem so vor:
Bestimmen der benötigten Sperrspannung
Bestimmen der Stromtragfähigkeit
Kataloge wälzen in denen zu jedem Typ die oben genannten Werte angegeben sind
(Gehäusebauform beachten)
Datenblätter der gefundenen Typen suchen und restlichen Parameter überprüfen.
3 Ausprägung im Versuch
Im Praktikumsversuch werden Transistoren in verschiedenen Schaltungen betrachtet. Sie
werden dazu zumeist voll durchgesteuert eingesetzt. Damit können Verluste im Vergleich zur
Beschaltung mit Widerständen gesenkt werden.
Tiefsetzsteller
Ein Tiefsetzsteller dient dazu, die Spannung am Bauteil beziehungsweise den Strom durch
ein Bauteil zu begrenzen. Klassischerweise wird eine solche Aufgabe durch einen
vorgeschalteten Widerstand gelöst. Bild 7 zeigt eine solche Anordnung. Der Widerstand, der
den Strom begrenzen soll, wird dabei vom gleichen Strom wie das Bauteil durchflossen.
Damit ergibt sich bei großen Strömen eine erhebliche Verlustleistung, die den
Gesamtwirkungsgrad der Anordnung stark herabsetzt.
Bild 7: Ballastwiderstand zur Strombegrenzung in der Last
Um die Verluste zu reduzieren wird folgende Methode angewandt. Mit einem Schalter wird
der Strom in der Last periodisch an- und abgeschaltet. Die geschieht so, dass die über die
Zeit integrierte mittlere Leistung an der Last dem gewünschten Wert entspricht. Dieser wird
durch das Verhältnis der Ein- und Ausschaltzeiten bestimmt. Das Verfahren wird
Pulsweitenmodulation genannt. Eine minimale Tiefsetzstellerschaltung ist in Bild 8 gezeigt:
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
TRA 9
Versuch Nr. 2: Transistoren
Bild 8: Tiefsetzsteller mit Schalter
Der Schalter wird in der realen Schaltung durch einen Transistor ersetzt. Mit diesem können
Ströme bis weit über den MHz-Bereich unterbrochen werden. Stört die Welligkeit der
Spannung an der Last kann die Spannung zusätzlich mit einem Kondensator geglättet
werden. Der Transistor und der Tiefsetzsteller sind der Hauptteil des ersten
Praktikumsversuchs.
Diese Schaltung wird beispielsweise in den Schrittmotortreiberbausteinen die im Praktikum
zum Einsatz kommen verwendet. Sie dient hier im Stromregelkreis für den
Schrittmotorstrangstrom als Stellglied. In diesem wird die Strominformation über einen
Messwiderstand zurückgekoppelt und der Regelkreis passt die Strangspannung mit dem
Tiefsetzsteller an.
Brückenschaltungen
Viele Anwendungen erfordern es, dass der Verbraucher nicht nur von der Spannungsquelle
getrennt wird. So ist es z. B. bei Piezoaktoren notwendig sie nach dem Aufladen wieder
definiert zu entladen. Dazu muss die Klemme, die zum Beladen auf dem Potential der
Betriebsspannung war, auf das Potential der zweiten Klemme des Piezos gezogen werden.
Über Be- und Entladewiderstände können definierte Zeitkonstanten erzielt werden.
Der obere Transistor solcher Brückenschaltungen spielt eine besondere Rolle. Bei seiner
Ansteuerung wird normalerweise ein Potential von wenigen Volt benutzt die sich auf die
Masse beziehen. Die Source-Spannung des Transistors ist aber je nach Zustand der
Schaltung veränderlich. Damit kann mit der Standardansteuerung kein definiertes Potential
gegenüber Source aufgebaut werden. Der sogenannte DC-DC-Wandler und die BootstrapSchaltung sind Möglichkeiten ein „sauberes“ Bezugpotential für den oberen Transistor
bereitzustellen. Der DC-DC-Wandler in diesem Praktikumsversuch erzeugt aus einer 12V
Spannung wieder eine Spannung selber Höhe, jedoch liegen die Massen der beiden
Spannung nicht auf demselben Potential.
Bild 9 zeigt die Idee einer Bootstrap-Schaltung: Ist der Piezo ungeladen, so liegt der SourceAnschluss von T2 auf Potential der Masse. Der Kondensator C kann sich nun über die Diode
auf Vcc=12V aufladen. Ist der Piezo jedoch geladen, so liegt der Source-Anschluss nicht
mehr auf Masse, sondern auf einem höheren Potential. Da der Kondensator jedoch voll
geladen ist und sich nicht entladen kann (die Diode verhindert dies), liegen beim Schließen
TRA 10
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 2: Transistoren
des Schalters S die kompletten 12V zwischen Gate- und Source-Anschluss. Der Transistor
kann voll durchgesteuert werden.
Bild 9: Funktionsprinzip einer Bootstrap-Schaltung
Bild 10: Drei mögliche Schaltungen zur Ladung und Entladung von Piezokeramiken
Will man darüber hinausgehend den Piezo mit zwei verschiedenen Polungen aus einer
Spannungsquelle versorgen, muss man eine Vollbrückenschaltung aufbauen. Hier kommen
als Schalter 4 Transistoren zum Einsatz der Strom der in die Last fließt kann durch die
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
TRA 11
Versuch Nr. 2: Transistoren
Ansteuerung der Transistoren umgeschaltet werden. Auch hier können die Be- und
Entladezeiten durch Widerstände eingestellt werden (siehe 1).
Diese Schaltung wird weniger häufig bei Piezokeramiken eingesetzt als bei
elektromagnetischen Aktoren mit Spulen, wie z. B. Schrittmotoren. Bei der sogenannten
bipolaren Ansteuerung von Schrittmotoren mit zwei Wicklungen kommen zwei solcher
Vollbrücken zum Einsatz (Siehe Praktikumsversuch über Motoren)
Bild 11: Vollbrückenschaltungen mit den jeweiligen Strömen zu den Piezos
4 Hausaufgaben
Für den Versuch 1 soll ein Transistor ausgewählt werden (PLampe=100 W, U = 12V)
1. Welchen maximalen Betriebsstrom muss der Transistor tragen können?
2. Welche Sperrspannung sollte der Transistor mindestens aufweisen?
3. Wie groß darf der Drain-Source-On-Widerstand maximal sein, damit im voll
durchgeschalteten Betrieb (Plampe = 100 W) die Verlustleistung am Transistor 1 W nicht
übersteigt?
4. Wählen Sie einen Transistor aus dem Angebot eines Elektronikversands aus (z. B. Farnell
oder Conrad)! Farnell eignet sich hierbei für die Recherche am besten, da man einzelne
technische Daten in einem Suchraster eintragen kann. Der Transistor muss folgende
Eigenschaften aufweisen:
• Er muss den Belastungen, die in Aufgaben 1-3 errechnet wurden, standhalten.
• Er muss ein Gehäuse vom Typ TO220 besitzen.
• Die Anschlussbelegung muss (von oben betrachtet, von links nach rechts) Gate Drain
Source lauten.
TRA 12
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 2: Transistoren
• Die maximale Gate-Source-Spannung muss mindestens 20 V betragen.
Drucken Sie das Datenblatt aus und legen Sie es Ihrer Hausaufgabe bei.
5. Welchen Wärmewiderstand muss der Kühlkörper besitzen, damit bei Raumtemperatur
und einer Verlustleistung am FET von 13 W eine Chiptemperatur von 125°C nicht
überschritten wird (bezogen auf den von Ihnen ausgewählten Transistor!)?
Aufgaben Teil 2:
Es gelten folgende Werte: Up = 30 V
R1 = R2 = 100 Ω, RDSon für T1 = T2 = 0,1 Ω, Cp = 10 nF
6. Berechnen Sie die Energie, die in R1 und T1 (siehe Prinzipschaltbild für den
Schaltverstärker bei der Versuchsdurchführung) beim vollständigen Entladen des Piezos
umgesetzt wird!
Annahme: Der Piezo sei ein idealer Kondensator.
Der Piezo wurde vollständig auf Up aufgeladen.
7. In welchem Verhältnis teilt sich die Verlustenergie auf T1 und R1 auf (Näherung)?
8. Welche Verlustleistung wird in R1 durchschnittlich umgesetzt, wenn ein Piezo mit 10 kHz
geladen und entladen wird (Näherung)?
9. Wie groß ist die Verlustleistung am Widerstand R2?
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
TRA 13
Versuch Nr. 2: Transistoren
5 Praktikumsaufgaben:
Im Laufe von Versuchsteil Nr. 1 soll eine bzw. zwei 50 W Halogenglühbirnen durch einen
Transistor geschaltet und gedimmt werden. Die Betriebsspannung dieser Lampen beträgt
12 V.
Versuchsteil 1: Tiefsetzsteller
a)
Stellen Sie am Leistungsnetzteil 3,3 V ein! Verbinden sie auf dem Steckbrett
„Tiefsetzsteller“ die Anschlüsse und Baugruppen zu der in Bild 9 gezeigten Schaltung!
Stecken Sie die Spannungsversorgung erst nach Kontrolle durch den Assistenten ein!
Bild 9: Schaltung zur Vermessung der Transistorkennlinien
Messung der Thresholdspannung:
Als Lastwiderstand dient eine Halogenlampe. Die Gate-Source-Spannung kann mit
dem Potimodul eingestellt werden. Steigern Sie langsam die Gatespannung (Poti) bis
ein Stromfluss einsetzt!
Aufnehmen von Kennlinien:
Stellen Sie das Leistungsnetzteil auf 0 V. Stellen Sie die in der Tabelle links
angegebene Gate-Source-Spannung ein! Steigern Sie die Spannung am Netzteil,
sodass sich ein UDS von ca. 0,2 V einstellt! Messen Sie nun ID und UDS genau! Steigern
Sie die Spannung am Leistungsnetzeil, zunächst in 0,2 V-Schritten von UDS später in
größer werdenden Schritten bis 5 V. Bei dieser Messung wird der Transistor schnell
warm, sie müssen daher zügig vorgehen. Zwischen den Messreihen muss der
Transistor abkühlen.
Übertragen Sie die untenstehende Tabelle auf Ihr Aufgabenblatt! Messen Sie die
benötigten Werte für die verschiedenen Gate-Source-Spannungen! Zeichnen Sie
daraus ein Kennlinienfeld! Diskutieren Sie im Anschluss kurz Ihr Ergebnis!
TRA 14
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 2: Transistoren
UGS=Uth+0,15V
UGS=Uth+0,3V
UGS=Uth+0,5V
UDS
ID
UDS
ID
UDS
ID
b)
Im Folgenden soll der für den Schalterbetrieb wichtige Kennwert RDSOn vermessen werden.
Das Netzteil bleibt auf 3,3 V. Für diesen Versuch wird ein Widerstandsmodul mit 0,33 Ohm
verwendet. Die Eingangsspannung des Potimoduls wird auf 12 V eingestellt.
Uth + 1V
UGS
Uth + 2V
Uth + 3V
Uth + 5V
Uth + 7V
ID bei R=0,33 Ω
UDS
RDson
Übertragen Sie wieder die Tabelle auf Ihr Arbeitsblatt! Zeichnen Sie diesmal ein
Diagramm, bei dem Sie RDson über UGS auftragen!
c)
Im folgenden Versuch soll der Tiefsetzsteller untersucht werden. Dazu werden die in
den Vorbereitungsfragen angesprochenen Glühbirnen betrieben. Zuerst wird eine
Lampe mit 50 W eingesetzt.
Schließen Sie als erstes den Spannungsmesser parallel zur Glühlampe an! Im Lauf
des Versuchs soll die Lampe mit Hilfe des Transistors auf 0 %, 25 %, 50 %, 75 %
100% gedimmt werden. Der Transistor soll dabei mit verschiedenen
Ansteuerschaltungen gesteuert werden. Zunächst mit einer Konstantspannung aus
einem Poti (wie oben), dann mit einem pulsweitenmoduliertem Signal direkt aus
einem Mikrocontroller und zuletzt mit eben diesem Signal, jedoch verstärkt durch
einen sog. MOSFET Treiber. Die Qualität der Steuerung soll dabei anhand der
Steuercharakteristik und der Erwärmung des Transistors bewertet werden.
Stellen Sie die Gate-Source-Spannung mit dem Potentiometer so ein, dass die
Spannung an der Lampe die Werte aus der Tabelle annimmt! Messen Sie den
Lampenstrom. Wiederholen Sie nach ca. 15 sek. die Messung von Spannung und
Strom an der Lampe! Die Spannung am Leistungsnetzteil beträgt 12V. Übertragen
Sie die Tabelle wieder auf das Arbeitsblatt:
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
TRA 15
Versuch Nr. 2: Transistoren
Spannung an der Lampe
Gate-Source-Spannung:
3V
6V
XXX
9V
XXX
12V
XXX
Lampenstrom
Leistung der Glühbirne
d)
Lassen Sie den Transistor abkühlen! Ersetzen Sie das Potentiometer durch das
PWM-Modul. Als Last wird nun eine 50W Halogenbirne verwendet. Erstellen Sie wie
für das Potentiometer obige Tabelle! Betrachten Sie zusätzlich qualitativ die GateSource-Spannung und Drain-Source-Spannung mit dem Oszilloskop!
e)
Stecken Sie nach Abkühlung des Transistors das Treibermodul in das Steckbrett!
Wiederholen Sie obiges Vorgehen! Welche Veränderung bemerken Sie?
f)
Bringen Sie nun die Induktivität in Reihenschaltung zu den Lampen! Stecken Sie
zusätzlich die Freilaufdiode in Parallelschaltung auf das Steckbrett! Gehen Sie für
Ihre Messung wie in c) bis e) beschrieben vor! Welche Beobachtung können Sie nun
am Oszilloskop machen? Probieren Sie was geschieht, wenn Sie die Freilaufdiode im
Betrieb abstecken!
TRA 16
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 2: Transistoren
Versuchsteil 2: Ansteuerung von kapazitiven Lasten
In diesem Versuchteil sollen kapazitive Lasten angesteuert werden. Auch Piezoaktoren wie
die im Praktikumsdruckkopf verhalten sich annähernd wie eine kapazitive Last. Zur
Ansteuerung wird eine Transistorhalbbrücke verwendet.
DC
DC
+12V
Logic in
Pegelshift
Prinzipschaltplan für den Schaltverstärker
Stecken Sie die einzelnen Module wie auf dem Steckbrett ersichtlich zusammen! Benutzen
Sie an Stelle des Piezos eine Lastkapazität von 10 nF. Der Betrieb mit periodischen
Signalen, wie sie auch den Druckkopf ansteuern, erfolgt durch den Taktgenerator.
a)
Beobachten Sie mit dem Oszilloskop die Spannung an der Kapazität. Welche
Kriterien bzgl. des Signals müsste man bei dem Betrieb eines Druckkopfes
heranziehen?
b)
Vermessen Sie die wichtigsten Punkte der Ansteuerschaltung. Merken sie sich
qualitativ die Spannungsverläufe!
Ersetzen Sie die Bootstrapschaltung, die für die Potentialeinstellung des oberen
MOSFET- Transistors notwendig ist, durch den DC-DC-Wandler!
c)
Beobachten Sie wie in b) verschiedene Punkte der Schaltung! Welche
Veränderungen können Sie feststellen?
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
TRA 17
Versuch Nr. 2: Transistoren
6 Literatur
[1] Schrüfer, E., 2004, Elektrische Messtechnik, 8. Auflage, Hanser, München
[2] U. Tietze, Ch. Schenk, 1986, Halbleiter-Schaltungstechnik, Achte,
Überarbeitete Auflage, Springer-Verlag, Berlin Heidelberg New York.
[3] Vorlesungsskriptum Feinmesstechnik 2, Prof. Heinzl, 1998, TU München
TRA 18
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 3: Operationsverstärker
Beschreibung zu Versuch Nr. 3:
Regelungstechnik mit dem Operationsverstärker (OP)
Yuichiro Honda, überarbeitet von Jakob Neuhäuser
1. Einordnung
Im Rahmen dieses Praktikums soll ein 3D-Wachsdruckgerät in Betrieb genommen werden.
Eine Teilaufgabe davon ist die Temperaturregelung des Druckkopfes. Um die Viskosität des
Wachses einzustellen und um das Wachs durch Druckdrüsen auszuspritzen, muss der
Druckkopf beheizt werden. Verschiedene Umgebungsbedingungen erfordern eine
individuelle Temperaturregelung des Druckkopfes.
Im Praktikum wird dazu ein Aufbau mit einem Zweipunktregler mit Rückführung verwendet.
Ein Temperatursensor (Thermoelement des Typs K (TE-K) oder ein PT100-Sensor), ein
Verstärker, ein Regler, eine Relais-Schaltung und ein Heizelement bilden hier den
Regelkreis (Abb. 1). Der Sensor überwacht die Temperatur des Druckkopfes. Der Verstärker
verstärkt das Sensorsignal auf das 1000-fache. Das verstärkte Sensorsignal wird vom Regler
verarbeitet. Der Regler ist eine Schmitt-Trigger-Schaltung bestehend aus einem
Operationsverstärker (OP). Im Allgemeinen können OPs keine ausreichende Energiezufuhr
für ein elektrisches Heizelement gewährleisten. Daher wird eine Relais-Schaltung am
Ausgang des OPs verwendet. Das elektrische Heizelement erwärmt daraufhin den
Druckkopf.
Druckkopf
Thermosensor
x1000
Regler
Relais
Heizelement
Elektrisches Signal
Thermische Kupplung
Bild 1: Regelkreis der Regelung der Druckkopftemperatur
2. Theorie und Materialien
Bei der Temperaturmessung muss eine passende Verbindung der Messleitungen
ausgewählt werden. Da die Kontaktstelle gelötet ist, könnte das Lot während der Messung
schmelzen. Bei normalen Lötkontakten sollte eine Temperaturmessung über 170°C nicht
durchgeführt werden.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
OP 1
Versuch Nr. 3: Operationsverstärker
2.1. Temperatursensoren
Temperatursensoren basieren auf thermischen Eigenschaften von Materialien
(thermomechanisch, thermoelektrisch und thermochemisch). Im Praktikum werden ein
Thermoelement vom Typ K (TE-K) und ein thermoelektrischer Widerstand PT100,
verwendet. Die Ausgangsgrößen der beiden Sensoren sind unterschiedlich. Die Messgrößen
des TE-Ks und des PT100 sind elektrische Spannung bzw. elektrischer Widerstand.
Thermoelektrische Widerstände werden allgemein in PTC- und NTC-Typen unterteilt. PTC
und NTC sind Widerstände mit positivem bzw. negativem Temperaturkoeffizienten. Beim
PTC erhöht sich der Widerstand bei steigender Temperatur. Der NTC hingegen weist einen
negativen Temperaturkoeffizienten auf. Deshalb wird der PTC als Kaltleiter und der NTC als
Heißleiter bezeichnet. Beide Sensortypen besitzen Eigenschaften, die sie für verschiedene
Anwendungen unterschiedlich gut geeignet machen. In Tabelle 1 werden Thermoelement
und thermoelektrischer Widerstand verglichen [1].
Tabelle 1: Vor- und Nachteile des Thermoelementes und des thermoelektrischen
Widerstand-Sensors (engl. RTD = Resistance Temperature Detector)
Merkmale
Thermoelement
Antwortzeit
Besser
Maximale Temperatur
Höher
Unempfindlichkeit
Besser
Kosteneffizienz
Besser
RTD
Genauigkeit
Besser
Langfristige Stabilität
Besser
Standardisierung
Besser
2.1.1. Thermoelement
Ein Thermoelement (TE) besteht aus zwei bestimmten Metall-Legierungen, die in Kontakt
stehen (verlötet oder verschweißt). Das TE erzeugt dabei eine elektrische Spannung
(Thermospannung), die durch den Seebeck-Effekt erzeugt wird. In Tabelle 2 werden
verschiedene Typen von Thermoelementen, deren Metall-Legierungen und deren
Temperaturbereiche dargestellt [2]. Im Praktikum wird das Thermoelement vom Typ K (NiCrNi) verwendet.
OP 2
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 3: Operationsverstärker
Typ
Material
Temperaturbereich in °C
B
Pt30%Rh - Pt6%Rh
0 ~ 1790
E
NiCr – CuNi
-200 ~ 900
J
Fe - CuNi
0 ~ 760
K
NiCr - Ni oder NiCr - NiAl
-250 ~ 1260
L
Fe - CuNi
0 ~760
N
NiCrSi - NiSi
300 ~ 1260
R
Pt13%Rh - Pt
1200 ~ 1790
S
Pt10%Rh - Pt
1200 ~1768
T
Cu - CuNi
-270 ~ 400
U
Cu - CuNi
0 ~ 370
Tabelle 2: Verschiedene Thermoelemente, Materialkombinationen und Temperaturbereiche
2.1.2. PT100
PT100 ist ein thermoelektrischer Widerstand (engl. RTD) mit einem positiven
Temperaturkoeffizienten. Die Widerstandsänderung beruht auf der Materialeigenschaft der
Platinlegierung. Das Verhältnis zwischen Temperatur und Widerstand ist nahezu linear für
einen kleinen Temperaturbereich. Der Widerstandswert wird mit Hilfe einer
Umwandlungsschaltung als elektrische Spannung oder als elektrischer Strom gemessen.
Dabei muss darauf geachtet werden, dass die Wärmeentwicklung aus dem Messstrom die
Messung nicht beeinflusst. Es gibt Zwei-, Drei- und Vier-Draht Systeme von PT100
Sensoren.
Bei
4-Draht-Systemen
bestehen
die
4
Leitungen
aus
zwei
Spannungsmessleitungen und zwei Stromzuführleitungen. IEC751 definiert die
Farbcodierung für die Sensorkabel des Platin-Widerstand-Thermometers (Rot/WeißMarkierung) wie folgt (Abb. 2) [3].
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
OP 3
Versuch Nr. 3: Operationsverstärker
Bild 2: Die Farbcodierung des Platin-Widerstand-Thermometers
Der PT100-Sensor ist entsprechend der Messgenauigkeit klassifiziert (Tab. 3). Im Praktikum
wird ein 2-Draht-System der Klasse B verwendet.
Tabelle 3: Norm IEC 60751: Sensor-Klassen für PT100
Norm IEC 60751
Genauigkeit bei 0 °C
Klasse AA
± 0,10°C
Klasse A
± 0,15°C
Klasse B
± 0,30°C
Klasse C
± 0,60°C
2.2. Operationsverstärker
Operationsverstärker (OP) sind elektrische Analogbauteile, die in der Regel als integrierte
Schaltungen (10 bis 50 Transistoren und etliche Widerstände auf einem Quadratmillimeter
großen Chip) ausgeführt sind. Im Gegensatz zur Digitaltechnik, bei der nur zwei Zustände
(z. B.: 0 V=Low, 5 V=High) existieren, liegt die Information in der Analogtechnik in den
kontinuierlichen Spannungs- bzw. Stromwerten vor. Mit OPs lassen sich mit geringem,
zusätzlichem Hardwareaufwand Schaltungen mit den unterschiedlichsten Funktionen
(Verstärker, Analogrechenelemente, Oszillatoren, Filter) realisieren. Für spezielle
Einsatzbereiche von OPs (DMS-Verstärker, HiFi-Verstärker, Videosignalverarbeitung,
Biopotential-Verstärker) stehen von verschiedenen Anbietern zahlreiche Typen zur
Verfügung. Außerdem macht die Weiterentwicklung der Herstellungstechnik (J-FET-,
Bipolar- und CMOS-OPs) die Operationsverstärker zunehmend anwenderfreundlich. Die
richtige Auswahl eines OPs ist sehr wichtig, um die jeweiligen Spezifikationen zu erfüllen.
Es gibt keinen idealen OP für alle Zwecke!
Operationsverstärker besitzen mindestens fünf Anschlusspins:
Zwei Eingänge, einen Ausgang und zwei Pins für die Betriebsspannung (siehe Abb. 3).
Bild 3: Anschlusspins eines Operationsverstärkers
OP 4
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 3: Operationsverstärker
Die Eingänge bestehen aus einem invertierenden und einem nichtinvertierenden Pin. Beim
Schaltungsaufbau muss man die beiden Eingänge dem jeweiligen Zweck entsprechend
verwenden. Sie sind nicht vertauschbar. Anwendungsbeispiele werden im Kapital 3.5
(Grundschaltungen mit dem Operationsverstärker) dargestellt. Im Allgemeinen weicht ein OP
wegen Nullpunktfehlern, Ein-/Ausgangswiderständen und Ein-/Ausgangsströmen vom
idealen OP ab (Tab. 4). Durch die große Universalität und der damit verbundenen weiten
Verbreitung ist eine Massenproduktion mit niedrigen Stückkosten möglich. Z. B. kostet ein
typischer OP vom Typ 741 im Einzelhandel ca. 15 Cent. Neben Einzeloperationsverstärkern
sind auch Mehrfach-OPs erhältlich, wobei zwei bzw. vier OPs in einem 8- bzw. 14-poligen
Gehäuse vereint sind.
Tabelle 4: Parametervergleich zwischen dem idealen OP, TL082 (J-FET) und µA741C
(bipolar)
Größe
ideal
TL082
µA741C
Eingangswiderstand in Ω
∞
1012
2x106
Eingangsstrom in pA
0
20
80x103
Ausgangswiderstand in Ω
0
40
75
Maximaler Ausgangsstrom in mA
∞
40
25
2.3. Relais
Ein Relais wird häufig als Schnittstelle zwischen einem Regelungs-/Steuerungssignal (einer
Regelungs-/Steuerungsschaltung) und dem Treiber eines elektrischen Aktors (einer
Starkstromschaltung) eingesetzt. Beim konventionellen Relais wird durch einen
mechanischen Kippmechanismus die Ein-/Ausschaltung realisiert. Bei jedem Kippen der
Kontaktstelle des Relais werden allerdings mechanische Schwingungen erzeugt. Dadurch
entstehen bei einem Schaltzustandwechsel mehrmalige Kontakte in kurzer Zeit (ca. 50 ms).
Ein neuer Typ von Relais ist ein Solidstate-Relais. Dieses Relais verzichtet auf den
mechanischen,
beweglichen
Teil.
Somit
entsteht
keine
Schwingung
beim
Schaltzustandwechsel. Die Lebensdauer des Solidstate-Relais ist länger als die eines
mechanischen Relais. Im Praktikum wird ein mechanisches Relais verwendet.
2.4. Elektrische Heizelemente
Elektrische Heizelemente entwickeln Wärme aus elektrischer Energie. Beispiele für ein
solches Heizelement sind ein Widerstand (eine Heizwendel, eine Glühwendel) und ein
Peltier-Element. Im Praktikum werden normale Widerstände als Heizelemente verwendet.
Sie werden seriell gelötet und in den Druckkopf eingesetzt.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
OP 5
Versuch Nr. 3: Operationsverstärker
2.5. Druckkopf
Der Druckkopf wurde speziell für das Praktikum aus einer Aluminium-Legierung hergestellt.
Er besteht aus den Temperatursensoren, dem Heizelement, einer Wachskammer und einer
Wachsspritzdüse.
3 Ausprägungen im Versuch
3.1. Thermoelement vom Typ K
Abbildung 4 zeigt die Kennlinie des Thermoelementes Typ K [2]. Die Linie kann man mit der
Gleichung
Thermospannung [mV] = 0,0407 [mV/°C] ⋅ Temperatur [°C] + 0,0094 [mV]
proportional annähren.
Bild 4: Kennlinie der Thermoelement Typ K, Temperatur gegen Thermospannung
3.2. PT100
Ein PT100 besitzt die Widerstandwerte 100 Ω bei 0°C und 138,4 Ω bei 100°C. Es gibt ein
festes Verhältnis zwischen dem Widerstand und der Temperatur. Dies wurde durch den
OP 6
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 3: Operationsverstärker
„International Temperature Standard 90“ (IST-90) sowie durch die IEC751 definiert
(Gleichung 2).
R t = R 0 ⋅ (1 + A ⋅ t + B ⋅ t 2 + C ⋅ ( t − 100 ) ⋅ t 3 )
(2)
t : gegebene Temperatur
Rt : Widerstand bei t
R0 : Nennwiderstand bei 0 °C (100 Ω)
1
°C
−3
A = 3,9083 ⋅10
−7
B = − 5,775 ⋅10
−12
C = − 4,183 ⋅10
C= 0
1
°C 4
1
°C 2
1
°C 4
(t < 0 °C),
(t >= 0 °C).
Bild 5: Kennlinie des PT100, Temperatur gegen Widerstand
Die Widerstandswerte ändern sich nahezu linear über den Temperaturbereich von 0 bis
100°C. Damit ändert sich der Widerstandwert um 0,384 Ω je 1°C Temperaturänderung.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
OP 7
Versuch Nr. 3: Operationsverstärker
Wenn man die Kurve im Temperaturbereich von 0ºC bis 100ºC linear annährt (Gleichung 3),
ergibt sich beispielsweise ein Fehler von ca. 0,4ºC bei 50ºC.
R t = R 0 ⋅ (1+A' ⋅ t)
A' = 3,85 ⋅ 10−3
(3)
1
°C
Lässt man durch einen Widerstand von 100 Ω einen Strom von 100 mA fließen, so wird eine
Wärmeenergie von 100 µW erzeugt. Ein Teil der Wärmeenergie erwärmt den Sensor. Zur
Vermeidung oder zur Verringerung des Messfehlers sollte ein guter Wärmekontakt zwischen
dem Messobjekt und dem Sensor bestehen.
3.3. Operationsverstärker
Der OP TL082 ist ein typisches Beispiel für einen Baustein mit J-FET-Eingängen (1012 Ω) mit
fünf Anschlusspins. Im Praktikum werden zwei Operationsverstärker (in einem Gehäuse) als
nichtinvertierender Verstärker und als Schmitt-Trigger verschaltet. Der Verstärkungsfaktor
des Verstärkers ist ca. 1000. Mit der Schmitt-Trigger-Schaltung kann man die gewünschten
Kippspannungen einstellen. Sie sind beide an die ±15 V Versorgungsspannung
angeschlossen.
Teilnehmer am Praktikum können eine oder mehrere Schaltungen mit selber ausgewähltem
Operationsverstärker auf einer Steckplatine aufbauen (Siehe Kapitel 5.2, Vorbereitung).
3.4. Heizelement
Das Heizelement besteht aus vier Widerständen (jeweils 33 Ω). Sie sind seriell verbunden
und an die ±15 V Versorgungsspannung angeschlossen. In den Widerständen wird die
elektrische Energie in Wärmeenergie umgewandelt. Die Leistung (P) wird aus dem
elektrischen Strom (I) und dem Widerstand (R) mit der Gleichung 4 beschrieben.
P = I2R
(4)
3.5 Grundschaltungen mit dem Operationsverstärker
Üblicherweise werden OPs immer mit einer äußeren Beschaltung betrieben, die dann für das
Verhalten der Schaltung ausschlaggebend ist. Die folgenden Schaltungen sind
Grundschaltungen mit Operationsverstärkern. Die Anwendung von Operationsverstärkern ist
vielseitig. Genauere Informationen zu verschiedenen Reglern, sowie der internen
Funktionsweise von OPs werden in der Literatur [4], [5] gezeigt.
Zum besseren Verständnis der Funktion einer Schaltung mit einem OP, gilt es, eine wichtige
Regel zu beachten:
Die Spannung zwischen dem invertierenden und nichtinvertierenden Eingang ist
immer NULL. Zwischen beiden Eingängen besteht aber kein Kurzschluss (Virtuell
Short).
OP 8
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 3: Operationsverstärker
Ein idealer OP besitzt einen unbegrenzt hohen Eingangswiderstand, reagiert am Ausgang
ohne Zeitverzögerung und kann unbegrenzte Ströme am Ausgang liefern.
Tabelle 5: Grundschaltungen von Operationsverstärkern
Invertierender Verstärker
UA = UE
−R 0
R1
Nichtinvertierender
Verstärker
*Diese
einen
Schaltung
sehr
kann
•
hohen
Eingangswiderstand
besitzen!
⎛ R ⎞
U A = U E ⎜1 + 0 ⎟
⎝ R1 ⎠
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
OP 9
Versuch Nr. 3: Operationsverstärker
Additionsverstärker
UA =
−R 0
−R 0
−R 0
U E1 +
U E2 +
U E3
R1
R2
R1
Subtraktionsverstärker
U A = U E2
(R 0 + R1 )R 3 − U R 0
(R 2 + R 3 )R1 E1 R1
Wenn R0=R1=R2=R3,
U A = U E2 − U E1
Spannungs-Strom-Wandler
⎛1
R 22
1⎞
I a = U e⎜ +
⎟ mit R 3 =
R1 + R 2
⎝ R1 R 2 ⎠
OP 10
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 3: Operationsverstärker
Strom-Spannungs-Wandler
U A = −I e ⋅ R 0
Integrator
U A (t ) = U A (t = 0) −
1
τ
t1
∫ U (t)dt
E
t0
mit der Zeitkonstante:
τ = R1 ⋅ C
Differenzierer
U A (t ) = −τ
dU E (t )
dt
mit der Zeitkonstante: τ = R 0 ⋅ C
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
OP 11
Versuch Nr. 3: Operationsverstärker
Invertierter Schmitt-Trigger
Einschaltpegel: U E + =
U R R 0 + U A+ R 1
R1 + R 0
Mit Ausgangspegel: UA+ = max. Ausgangsspannung
Ausschaltpegel: U E - =
U R R 0 + U A− R 1
R1 + R 0
Mit Ausgangspegel: UA- = min. Ausgangsspannung
Schalthysterese:
ΔU E = U H =
R1
(U A + − U A- ) = R 1 2U A
R1 + R 0
R1 + R 0
Referenzspannung:
UR =
U A (U E + + U E- )
2U A − U E + + U E-
4 Hausaufgaben
Der Signalfluss des Regelkreises wird in Abbildung 1 dargestellt. Dieser soll durch eine
elektrische Schaltung realisiert werden. Eine mögliche Versuchsschaltung dieses
Regelkreises zeigt Bild 6.
4.1. Erklärung der Versuchsschaltung
Der Operationsverstärker (TL082) wird mit einer 12-V-Spannung versorgt. Die
Kondensatoren C2 und C3 dienen der Versorgungsspannungsstabilisierung des
Operationsverstärkers. Der Verstärker besteht aus einem Operationsverstärker (IC3B), zwei
Eingängen (X1) und zwei Widerständen (R1, R2). Sie bilden einen nichtinvertierenden
Verstärker. Das Eingangssignal wird gemäß den Widerständen auf ca. 1000-fache
Verstärkung eingestellt. Dadurch wird bei der Messung des TE-Ks die Messspannung vom
„mV“ Bereich auf den „V“ Bereich vergrößert. Zwei Potentiometer (R7, R8) und ein
OP 12
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 3: Operationsverstärker
Operationsverstärker (IC3A) bilden eine Schmitt-Trigger-Schaltung. Die Schmitt-TriggerSchaltung gibt anhand des Eingangs die maximalen Ausgangssignalpegel des
Operationsverstärkers aus. Der Widerstand R7 stellt die Größe der Hysterese ein. Mit dem
Widerstand R8 wird die mittlere Spannung der Hysterese eingestellt. Das Regelungssignal
wird durch die Schaltung-1 an den FET (Q1) weitergeleitet. Der FET (Q1) ist ein N-Kanal
FET. Er wird durch ein positives Spannungssignal am Gate-Pin eingeschaltet. Der
Widerstand R3 dient als Strombegrenzung. Ein Relais (K1) wird durch den FET Q1
gesteuert. Die Ein- und Ausschaltzustände des FET Q1 entsprechen jeweils den Ein- und
Ausschaltzuständen des Relais K1. Der Widerstand R4 ist das Heizelement. Wenn das
Relais K1 eingeschaltet ist, wird R4 erwärmt. Dadurch wird der Druckkopf beheizt. Die
Temperatur des Druckkopfes wird durch die Temperatursensoren (TE-K oder PT100)
gemessen. Die Ausgangssignale der Sensoren werden durch die Anschlüsse (X1-1, X1-2)
zum Verstärker geleitet. Somit ist der Regelkreis für die Temperatur des Druckkopfes
geschlossen.
Bild 6: Versuchsschaltung: Verstärker (R1, R2, IC3B), Schmitt-Trigger-Schaltung (R7, R8,
IC3A), Relais-Schaltung (Q1, R3, K1), Heizelement (R4)
4.2. Vorbereitung (Hausaufgabe)
1. Für den Versuch im Praktikum stehen folgende Operationsverstärkertypen zur Verfügung:
LF356N, UA74 und LF412.
Recherchieren Sie im Internet nach den Datenblättern für diese Typen und suchen Sie das
für die gestellte Aufgabe geeignetste Modell heraus! Bringen Sie das Datenblatt zum
Praktikum mit! Versuchen Sie Ihre Auswahl anhand der Kenndaten zu begründen!
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
OP 13
Versuch Nr. 3: Operationsverstärker
2. Die Verstärkereinheit der Versuchsschaltung hat als Ausgangsgröße die elektrische
Spannung. Bei einer Messung mit dem Thermoelement kann man die Thermospannung also
direkt verstärken. Wie kann man die Messgröße des PT100 in eine elektrische Spannung mit
dem passenden Bereich für den Verstärker umwandeln? Bitte skizzieren Sie die
Messschaltung bei der Messung mit einem PT100! Auf was muss hierbei geachtet werden
(Spannungen und Ströme abschätzen!)? Experimentieren Sie mit der bereitgestellten
Steckplatine!
3. Schätzen Sie vor dem Praktikum Ihre Ergebnisse ab, wenn Sie den Operationsverstärker
TL082 mit dem von Ihnen ausgewählten Operationsverstärker tauschen: 1) den
Verstärkungsfaktor, 2) die Offset-Spannung, 3) das Kippverhalten an der Schmittschaltung
und 4) die Temperaturstabilität der Heizung bei der Messung.
4. Was für eine Funktion wird an der Stelle „Schaltung-1“ in der Versuchsschaltung (Bild 6)
sinnvoll eingesetzt? Aus welchem Grund wird diese Funktion benötigt?
5. Bestimmen Sie die theoretischen Einstellwerte der Potentiometer R7 und R8, um die
Temperatur des Druckkopfes zwischen 70 ºC und 80 ºC zu regeln! Annahmen hierfür sind: 1)
TE-K wird als Thermosensor verwendet, 2) die Verstärkereinheit weist eine 1000-fache
Verstärkung auf, 3) R7 besteht aus 2 Widerständen die mit dem OP den Schmitt-Trigger
bilden, R8 ist ein Spannungsteiler um eine asymmetrische Hysterese (UR) zu erhalten
4) R8 = 100kΩ, R7 = 10kΩ
Bild 7: Vereinfachte Darstellung der Schmitt-Trigger-Schaltung (R7, R8, IC3A)
OP 14
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 3: Operationsverstärker
5 Praktikumsaufgaben:
5.1 Grundschemata der Experimente
Jedes Experiment besteht aus folgenden fünf Schritten: 1) Messung der Funktionseinheiten,
2) Einstellung des Regelkreises, 3) Beschaltung des Regelkreises, 4) Beobachtung und 5)
Verbesserung.
• Messung der Funktionseinheiten
Zuerst bauen Sie die Versuchsschaltung ohne Verbindungen zwischen Ein/Ausgängen
der Funktionseinheiten auf, um die einzelnen Eigenschaften der Funktionseinheiten
kennen zu lernen. Messen Sie das Ausgangssignal des TE-Ks mit verschiedenen
Temperaturen!
• Einstellung des Regelkreises
Stellen Sie die beiden Potentiometer R7 und R8 so ein, dass der Druckkopf auf einem
bestimmten Temperaturbereich geregelt wird! Die Zieltemperatur des Druckkopfes ist 75
± 5 ºC. Die Einstellwiderstände der Potentiometer können mit Hilfe der Kennlinien
berechnet werden!
• Beschaltung des Regelkreises
Verbinden Sie den Ausgang der Verstärkereinheit und den Eingang der Schmitt-TriggerSchaltung.
Schließen Sie direkt den Ausgang der Schmitt-Trigger-Schaltung mit dem Eingang des
FETs zusammen!
Schließen Sie die von Ihnen zusammengesteckte Schaltung an!
• Beobachtung
Beobachten Sie das Verhalten der Schaltung! Die elektrischen Bauteile werden mit
bestimmter Toleranz gebaut. Dadurch stimmen der theoretische Wert und das
Messergebnis nicht vollständig überein. Jeder Zweck erfordert unterschiedliche
Optimierung der Schaltung. Ist z. B. der Verstärkungsfaktor der Verstärkereinheit mit
einem Wert von exakt 1000 in diesem Praktikum notwendig?
• Verbesserung
Die Einstellung aus der theoretischen Berechnung und das tatsächliche Verhalten der
Schaltung sind wegen der Toleranzen der Bauelemente nicht übereinstimmend. Dieser
Fehler kann durch die Beobachtung nachjustiert werden.
5.2. Aufgaben
Aufgabe 1: Kennlinien der Sensoren und der Verstärkereinheiten
Um das Heizelement auf eine bestimmte Temperatur zu regeln, sollten die
Eigenschaften des Sensors und der Verstärkereinheit bekannt sein.
Nehmen Sie die Kennlinien des TE-Ks bzgl. der Temperatur auf! Verwenden Sie als
Messgröße den Ausgang des Verstärkers (die beiden Sensoren zeigen fast lineare
Eigenschaften der Messgrößen gegenüber der Temperatur)!
Schließen Sie zuerst beide Eingänge des Verstärkers kurz und messen Sie
dann den Nullpunktfehler!
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
OP 15
Versuch Nr. 3: Operationsverstärker
Aufgabe 2: Graphische Darstellung der Kennlinien
Zeichnen Sie die Kennlinien des TE-Ks gegenüber der Temperatur graphisch! Lesen
Sie den Sollwert (die elektrische Spannung) des Druckkopfes aus den Kennlinien ab!
Aufgabe 3: Einstellung der Regelkreise
Stellen Sie die beiden Potentiometer R7 und R8 so ein, dass der Druckkopf auf einen
bestimmten Temperaturbereich geregelt wird. Die Zieltemperatur des Druckkopfes ist
75 ± 5 ºC. Die Einstellwiderstände der Potentiometer können mit Hilfe der Kennlinien
berechnet werden.
Aufgabe 4: Leistung des Heizelements
Berechnen Sie die Leistung des Heizelements!
Aufgabe 5: Beobachtung der Regelkreise
Beobachten Sie die Regelkreise der beiden Sensoren! Beschreiben Sie, wie die
Regelkreise funktionieren! Bei welchen Bedingungen wird das Heizelement ein- oder
ausgeschaltet? Was für ein Störsignal könnte diese Regelkreise beeinflussen?
Aufgabe 6: Einfluss von thermischen Störungen
Erzeugen Sie thermische Störungen (Abkühlung und Erhitzung) und beobachten Sie
die Reaktion des Regelkreises. Sie können mit einem Kältespray bzw. Luftspray den
Druckkopf abkühlen. Zum Erhitzen können Sie einen Fön verwenden.
Aufgabe 7: Analyse der Regelkreise
Beschreiben Sie das Verhalten der Regelkreise und nennen Sie
Verbesserungsmöglichkeiten am Regelkreis, um die Temperatur konstanter zu
halten!
6 Literatur
[1] Maxim IC, 2005.,’Positive Analog Feedback Compensates PT100
Transducer’, [Online], Application Note. Available from: <http://www.maximic.com/appnotes.cfm/appnote_number/3450> [16. 12. 2005].
[2] NN ‚Grundlagen Thermoelemente’, 2002, [Online], Temp-Web.DE. Available
from: <http://www.tempweb.de/modules.php?name=Content&pa=showpage&pid=36>[10.03.06].
OP 16
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 3: Operationsverstärker
[3] NN ‚RTDs’, [Online], Capgo Pty Ltd. Available from:
<http://www.capgo.com/Resources/Temperature/RTDs/RTD.html> [17. 4.
2006].
[4] Mann, H., Schiffelgen, H. & Froriep, R. 2003, Einführung in die
Regelungstechnik, 9. Auflage, Hanser, München.
[5] Schrüfer, E., 2004, Elektrische Messtechnik, 8. Auflage, Hanser, München
[6] U. Tietze, Ch. Schenk, 1986, Halbleiter-Schaltungstechnik, Achte,
Überarbeitete Auflage, Springer-Verlag, Berlin Heidelberg New York.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
OP 17
Versuch Nr. 4: Antriebskonzepte
Beschreibung zu Versuch Nr. 4:
Untersuchung verschiedener Führungskonzepte
Jan Harnisch, überarbeitet von Sebastian Gepp
1. Einordnung
Die Auflösung eines Druckgerätes wird im Wesentlichen durch zwei Faktoren bestimmt. Zum
einen ist die Größe der mit dem Druckkopf erzeugbaren Tropfen wichtig, zum anderen die
Genauigkeit der Druckkopfpositionierung. Diese Größe stellt besondere Anforderungen an
den
Druckkopf.
Hierin
sind
die
Herausforderungen
für
mikromechanische
Fertigungsmethoden und Aufbauten gegeben.
Je nach Druckverfahren ist auch die Steifigkeit der Mechanik von Bedeutung. Für ein
einwandfreies Funktionieren sind folgende Konzepte von Bedeutung: Spielfreiheit oder
Einstellbarkeit von Führungen, Vorspannung von Gewindespindeln und Zahnrädern/Zahnriemen. Bei hohen Anforderungen an die Dynamik werden meist Direktantriebe eingesetzt,
wobei als Führungen auch Luftlager oder Magnetlager denkbar sind. Beispiele für derartige
Drucksysteme sind Anlagen, die für das Drucken von LED-Bildschirmen (siehe Bild 1)
verwendet werden oder mit denen durch Verwendung leitfähiger Tinte feinste Leiterbahnen
auf flexible Substrate (Folienleiter) gedruckt werden können.
Bild 1: OLED- Produktionsprozess bei Phillips (l.), Mikroskop-Bild eines OLED-Displays (r.)
(OLED = Organische Leuchtdiode)
Auch für die 3D-Druckverfahren ist die Mechanik des Gerätes von entscheidender
Bedeutung. Wie in einer Werkzeugmaschine müssen alle Achsen beweglich ausgeführt
werden. Ein Transport des Papiers, wie im Officedrucker, ist hier nicht möglich. Zusätzlich
muss hier eine Bewegung in Z-Richtung stattfinden. Diese Verfahrmöglichkeit wird meist mit
hohen Lasten beaufschlagt und muss trotzdem hohen Anforderungen an Präzision genügen.
Dieser Praktikumsversuch soll einen möglichst breiten Überblick über gängige Konzepte von
Führungen bieten. Aus diesem Grund werden hier auch Konstruktionen behandelt, die
üblicherweise nur in Werkzeugmaschinen oder in der Feinwerk- und Mikrotechnik
angewendet werden, aber in anderen Bereichen, wie zum Beispiel bei Druckern, je nach
Problemstellung durchaus eine adäquate oder bessere Wahl darstellen können.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
FK 1
Versuch Nr. 4: Antriebskonzepte
2. Theorie
Die Theorie von Bewegungskinematiken basiert auf den mechanischen Grundlagen, die im
Fachbereich „Maschinenelemente“ gelehrt werden. Dazu wird die Grüblergleichung zur
Analyse herangezogen. Hierzu wird der Begriff der Sonderabmessungen anschaulich
erläutert. Ein weiteres Thema sind die Begriffe Selbsthemmung und Steifigkeit, die großen
Einfluss auf die Präzision eines Systems haben. Durch eine mechanische
Schwingungsanregung die wiederum durch den Stick-Slip-Effekt hervorgerufen wird, wird die
Präzision weiter beeinflusst. Des Weiteren sollen die Grundlagen der Umsetzung von
Rotationsbewegungen in Linearbewegungen gezeigt werden.
Statische Bestimmtheit anhand der Grübler-Gleichung
Die meisten Führungen fixieren 5 der 6 im Raum vorhandenen Freiheitsgrade (3
rotatorische, 3 translatorische). Seltener werden Führungen mit mehr als einem
Freiheitsgrad eingesetzt (Beispiel: Führung der Bohrspindel einer Tischbohrmaschine; 1 rot.
+ 1 transl. Freiheitsgrad).
Der Freiheitsgrad einer Führung und die Anforderungen an deren Herstellung lassen sich mit
der Grübler-Gleichung bestimmen. Dafür wird die Führung in Teilelemente zerlegt, deren
Freiheitsgrad bekannt ist. Die allgemeine Grübler-Gleichung lautet:
F = B ⋅ (n − 1 − g ) + ∑ bi + ∑ si
Dabei bedeuten die einzelnen Zeichen:
F: Freiheitsgrad
B: Bewegungstyp (ebene/sphärische
Anordnung: B=3, räumliche Anordnung:
B=6)
FK 2
g: Anzahl der Gelenke (od. Gelenkflächen)
bi: Beweglichkeit des Gelenks i
si: eingehaltene Sonderabmessungen
n: Anzahl der Elemente
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 4: Antriebskonzepte
Bild 2: Freiheitsgrade von räumlichen Gelenken
Wenn man keine besonderen Anforderungen an die Fertigungsgenauigkeit stellen will,
verwendet man beispielsweise eine Linearführung aus zwei Zylinder/ZylinderElementargelenken (1 x Flächenberührung, 1 x Punktberührung):
Bild 3: Statisch bestimmte Führung; F=6(2-1-2)+2+5=1
Es fällt auf, dass für F=1 die Summe der Gelenkbeweglichkeiten ungerade sein muss. Daher
ist es nicht ohne weiteres möglich, eine Führung mit F=1 aus zwei identischen
Elementargelenken aufzubauen. Das hindert jedoch viele Konstrukteure nicht daran, es
trotzdem zu tun (oft sogar aus guten Gründen).
Eine solche in der Praxis gebräuchliche Art der Führung ist in Bild 4 dargestellt:
Bild 4: Führung aus zwei Schiebehülsen
Die Berechnung des Freiheitsgrades ergibt hier zunächst F=6(2-1-2)+4 = -2, d. h. die
Führung dürfte sich überhaupt nicht bewegen lassen. Um zu F=1 zu kommen, sind deshalb
noch drei sogenannte Sonderabmessungen zu erfüllen:
- die Stangen müssen zueinander parallel sein
- die Hülsen müssen zueinander parallel sein
- der Abstand der Stangen im Gestell muss dem Abstand der Hülsen im Schlitten
entsprechen.
Diese Bedingungen müssen entweder bei der Konstruktion (Selbsteinstellung/Vorsehen von
federnden Elementen), bei der Fertigung (Anpassen/Einhaltung einer entsprechenden
Genauigkeit) oder bei der Montage (Justieren/verspannungsfreier Zusammenbau in der
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
FK 3
Versuch Nr. 4: Antriebskonzepte
richtigen Position) erfüllt werden. Für den Betrieb einer solcherart überbestimmten Führung
ergeben sich eventuell Einschränkungen z. B. durch Verspannung in Folge von
Wärmedehnungen.
Reibung und Selbsthemmung
Bild 5 zeigt einen Körper, der von einer Kraft F auf eine Unterlage gedrückt wird. Diese teilt
sich in eine Normalkomponente Fn und eine Tangentialkomponente Ft auf. Ist das Verhältnis
von Normal- zu Tangentialkraft ausreichend groß, so befindet sich der Kraftvektor innerhalb
des sogenannten Reibungskegels und der Körper bleibt in Ruhe, d. h. es tritt
Selbsthemmung auf. Der Öffnungswinkel des Reibungskegels wird durch das Verhältnis von
Tangential- zu Normalkraft bestimmt, bei dem sich der Körper in Bewegung setzt. Dieses
Verhältnis heißt Haftreibwert µ0.
Bild 5: Haftung und Gleitreibung
Wird der Körper bewegt, so liegt der aus Normal- und Reibungskraft zusammengesetzte
Kraftvektor genau auf dem Reibungskegel. Es ist zu beachten, dass der Öffnungswinkel des
Reibungskegels je nach Geschwindigkeit unterschiedlich sein kann. Er wird definiert durch
den Reibwert µ=Fr/Fn.
Sämtliche Lagerungen weisen bei endlicher Relativgeschwindigkeit Reibung auf. Je nach
Führungsart gibt es meist einen charakteristischen Zusammenhang zwischen Reibwert und
Relativgeschwindigkeit, z. B.:
• bei Wälzlagerungen ist µ nahezu unabhängig von der Geschwindigkeit. Der Reibwert
kann aber z. B. durch reichhaltige Schmierung bei hoher Geschwindigkeit
nennenswert ansteigen (Strömungs-/Planschverluste).
• Luftlagerungen und hydrostatische Lagerungen haben im Stillstand µ0=0; bei
zunehmender Verschiebegeschwindigkeit ergibt sich durch die Zähigkeit der Luft
bzw. des Öls ein Reibungswiderstand. Zumindest bei Luftlagern ist dieser meist
vernachlässigbar.
• Gleitlager benötigen im Stillstand zur Überwindung der Haftreibung meist eine
Losbrechkraft, die größer als die Verschiebekraft ist: der Haftreibwert µ0 ist größer als
der Gleitreibwert µ.
FK 4
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 4: Antriebskonzepte
In Bild 5 ist ein gleitgelagerter Schlitten mit außermittigem Antrieb gezeigt. Aus den Kräfteund Momentengleichgewichten ergibt sich:
∑F
∑F
x
: FN 1 = FN 2 ;
Y
: F = FR1 + FR 2 ;
∑M
Z
b
:F (e + ) = FN 2 ⋅ l + FR 2 ⋅ b
2
Bild 6: Schlitten mit außermittigem Antrieb
Es ist zu sehen, dass dieses Gleichungssystem noch nicht eindeutig lösbar ist. Jedoch
können beide Kontaktpunkte jeweils maximal eine Reibkraft FR=µ⋅FN übertragen. Da die
Normalkräfte FN1 und FN2 gleich groß sind, ist die maximal übertragbare Reibkraft
FRges=2⋅µ0⋅⋅FN. Wird F größer als diese Kraft, tritt Gleiten auf. Die Grenzbedingungen lauten
somit:
F = 2 ⋅ μ 0 ⋅ FN
b
F (e + ) = FN ⋅ l + μ 0 ⋅ FN ⋅ b
2
und es ergibt sich:
l = 2 ⋅ μ0 ⋅ e .
Beim Bau eines exzentrisch angetriebenen Schlittens ist deshalb darauf zu achten, die
Schlittenlänge l nicht zu kurz zu wählen. Um den Verschleiß zu vermindern, wird man in der
Praxis l üblicherweise wesentlich länger wählen als nach obiger Formel berechnet. Weiterhin
fällt auf, dass die Selbsthemmung unabhängig von der Breite der Führung ist. Jeder wird aus
eigener Erfahrung bestätigen können, dass sich eine schlecht gebaute Schublade
verklemmen kann, obwohl der Griff in der Mitte ist.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
FK 5
Versuch Nr. 4: Antriebskonzepte
Stick-Slip, Steifigkeit
Durch die besondere Reibcharakteristik von Gleitlagern (µ0 > µ) kann es unter ungünstigen
Bedingungen zum sog. Stick-Slip-Effekt kommen: Um einen gleitgelagerten Schlitten in
Bewegung zu setzen, arbeitet der (endlich steife) Vorschubantrieb zunächst gegen die
Haftreibung und verformt sich dabei, bis die Losbrechkraft erreicht ist. Durch die nun frei
werdende mechanische Spannung des Vorschubantriebs wird der Schlitten beschleunigt.
Wenn dabei die Kraft aus dem Vorschubantrieb zu weit zusammenbricht, kommt der
Schlitten wieder vollständig zur Ruhe und der Vorgang wiederholt sich.
Dieser
Effekt
kann
zu
unerwünschten
Schwingungen
und
nennenswerter
Geräuschentwicklung führen. Ein einfaches Beispiel für Stick-Slip sind quietschende Türen.
Die hohe Steifigkeit der auf Torsion beanspruchten Komponenten (Scharniere) führt zur
hohen Frequenz dieser Anregung.
Bild 7: Reibung und Stick-Slip-Effekt
Stick-Slip lässt sich verringern durch:
• geringeren Reibwertabfall im Mischreibungsgebiet (Bereich des Übergangs von Haftzu Gleitreibung, wenn noch kein vollständiger Schmierfilm aufgebaut ist), z. B. durch
ein zäheres Schmiermittel
• höhere statische Steifigkeit des Vorschubantriebs
• geringere Massen
3 Ausprägungen im Versuch
Im folgenden Abschnitt werden Führungen gezeigt, wie sie in der Praxis des Maschinenbaus
ausgeführt werden, bzw. solche, die als Systembauteile käuflich erhältlich sind. Dabei
werden ihre Vor- und Nachteil angesprochen.
In einem weiteren Teil werden rotatorische Bewegungen, die der elektrische Motor des
Druckers erzeugt, in lineare Bewegungen umsetzen. Mit den Komponenten Linearführung
und Antrieb kann ein x-y-Tisch aufgebaut werden. Diese Bewegungsform eignet sich
besonders für Drucker, die Matrixbilder erzeugen sollen.
FK 6
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 4: Antriebskonzepte
Führungen in der Praxis
Je nach Einsatzfall ergeben sich unterschiedlichste Anforderungen an Präzision, Steifigkeit,
mögliche Verfahrgeschwindigkeiten, Bauraum, etc., denen durch eine entsprechende
Gestaltung Rechnung getragen werden muss.
Nachfolgend findet sich eine Aufstellung einiger praktischer Anforderungen und eine Liste
gängiger Führungskonzepte. Die Darstellung beschränkt sich dabei, soweit nicht anders
angegeben, auf Führungen für lineare Bewegungen; die meisten Kriterien gelten aber analog
auch für rotatorische Führungen.
Kriterien an ein Führungssystem:
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
Tragkraft
Bauraum
Steifigkeit
Dämpfung
Präzision
Spielfreiheit/Einstellbarkeit
Klemmbarkeit
Verfahrgeschwindigkeit
max. Verfahrweg
Stick-Slip-Anfälligkeit
Selbsthemmung
Leichtgängigkeit/µ-v-Verhalten
Verschleiß/Langzeitverhalten/Störanfälligkeit
Auswechselbarkeit
Eignung für hochdynamische Anwendungen (Oszillation)
Schmutzanfälligkeit
Schmutzerzeugung/Kontamination der Umgebung
Schmiermittelbedarf
Kosten
Schlupf
Umkehrspiel
Rückwirkungen auf die Führungsgenauigkeit: Die meisten Antriebe für axiale
Bewegungen verursachen auch unerwünschte laterale Kräfte, die von den Führungen
aufgefangen werden müssen. Beispielsweise haben viele Schraubstöcke eine leicht
verbogene Gewindespindel, was dazu führt, dass die bewegliche Schraubstockbacke
bei Drehung der Spindel sichtbar wackelt. Bei ausreichend hohen Anforderungen an
die Genauigkeit kann zusätzlicher konstruktiver Aufwand nötig werden, um die
Übertragung derartiger unerwünschter Seitenbewegungen auf die Führungen
auszuschließen.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
FK 7
Versuch Nr. 4: Antriebskonzepte
Wichtige Typen von Führungen:
•
Gleitführungen/hydrodynamische Lager
Verschiedenste Bauformen, z. B.: Schwalbenschwänze, Prismen, Rundführungen
Teilweise mit eingesetzten Gleitelementen (Bronze oder Kunststoffe)
Teilweise selbsttätige Nachstellung bei Verschleiß (Prismenführung)
Übliche Betriebsgeschwindigkeiten kleiner als bei Wälzführungen
Hohe Dämpfung und Genauigkeit
Bild 8: Einige Bauformen von Gleitführungen
•
Wälzführungen
Bauformen z. B.: Kugelbüchsen, Kugel-/Rollenumlaufführung
Niedrige Reibwerte (µ=0,001...0,004), kaum Stick-Slip
Niedrige Dämpfung
Bild 9: Wälzführungen: Kugelbüchsen (a: ohne, b: mit Kugelrückführung), Flachführungen,
Rollenumlaufschuhe
FK 8
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 4: Antriebskonzepte
•
Aerostatische Lager (Luftlager)
Bild 10: Aerostatische Lager. Links: Planlager, rechts: Schlitten aus vier flächigen
Lagerelementen
•
Magnetlager
Bild 11: Magnetlager für Wellen
•
Festkörpergelenke für translatorische Bewegungen (hier: x-y-Tisch)
Bild 12: Am Lehrstuhl hergestellter x-y-Tisch für Bewegungen im Submikrometerbereich. Die
einzelnen Teilbewegungen können z. B. mit Piezoelementen erzeugt werden.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
FK 9
Versuch Nr. 4: Antriebskonzepte
•
•
Gewindespindel (Normale Schrauben, Trapezgewindespindeln)
Kugelumlaufspindel
Bild 13: Schnitt durch eine - auf Grund von Vorspannung - spielfreie Kugelumlaufspindel
•
•
Rollenumlaufspindel
Rollringgetriebe (Erfinder: Fa. Uhing)
Bild 14: Prinzip (links) und technische Ausführung (rechts) eines Rollringgetriebes
•
•
•
•
•
•
•
•
•
•
FK 10
Flach-/Keilriemen
Zahnriemen
Zahnstange
Direktantrieb-Linearmotor/Schraubengewinde-Reluktanzmotor
Pneumatikzylinder
Hydraulikzylinder
Piezostriktiver Aktor
Thermostriktiver Aktor
Elektrostriktiver Aktor
Magnetostriktiver Aktor
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 4: Antriebskonzepte
Spielfreiheit, Festkörpergelenke
Um trotz Fertigungstoleranzen eine leichtgängige Bewegung zu gewährleisten, haben die
meisten Führungs- und Antriebselemente etwas Spiel. Durch den Spalt zwischen den
einzelnen Bauteilen kann sich Schmiermittel verteilen und die Bewegung wird von kleinen
Schmutzpartikeln weniger beeinträchtigt.
Unter Genauigkeitsaspekten ist dieses Spiel meistens störend und muss mit geeigneten
Maßnahmen vermieden werden. Wie schon im Abschnitt „Statische Bestimmtheit“
angesprochen, bestehen hierfür die Möglichkeiten
• Anpassen
• Justieren
• Selbsteinstellung
Um dem nach einer gewissen Betriebszeit anfallenden Verschleiß entgegenwirken zu
können, sind vor allem die beiden letzteren Möglichkeiten geeignet. Beispiele für die
spielfreie Lagerung einer Welle zeigt das Bild 15.
Bild 15: Spielfreie Lagerung einer Welle
Bei wälzgelagerten Führungselementen für Präzisionsanwendungen (Rollenumlaufführung,
Kugelumlaufspindel etc.) wird die Spielfreiheit meist durch Anpassen erreicht. Die genau
gefertigten Bauteile sind nach dem Zusammenbau um einige Mikrometer gegeneinander
vorgespannt. Durch den im Vergleich zu Gleitführungen wesentlich geringeren Verschleiß
bleibt die Vorspannung über eine lange Betriebsdauer erhalten.
Führungen auf der Basis von Festkörpergelenken (s. Bild 12) weisen prinzipbedingt kein
Spiel auf. Das Gelenk kann entweder (wie im Bild gezeigt) zusammen mit der restlichen
Mechanik aus einem Stück gefertigt werden, oder es werden federnde Bleche o. ä.
verwendet.
Führungen aus Festkörpergelenken sind nicht nur spielfrei, sondern auch Stick-slip-frei und
bei geeigneter Gestaltung in den anderen Koordinatenrichtungen sehr steif. Weitere Vorteile
sind die geringe Masse, die Schmutzunempfindlichkeit und die einfache Herstellbarkeit.
Nachteilig sind die geringe Dämpfung und die eingeschränkten Verschiebewege. Speziell im
Bereich der Mikrotechnik werden häufig elektromechanische Komponenten aus Silizium
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
FK 11
Versuch Nr. 4: Antriebskonzepte
hergestellt (z. B. Spiegelarrays für DLP-Videoprojektoren). Da Silizium als Einkristall keine
Gitterfehler aufweist, tritt hier auch keine Materialermüdung auf und die Lebensdauer solcher
Bauteile ist praktisch unbegrenzt.
In Fällen, in denen die Rückstellkräfte von Festkörperlagern unerwünscht sind und nur
Druckkräfte übertragen werden müssen, kommen häufig Schneidenlager zum Einsatz. Als
sehr reibungsarme Lager werden sie z. B. in Präzisionswaagen eingesetzt. Linearführungen
auf der Basis von Schneidenlagern sind aufgrund der nur einseitigen Kraftübertragung wenig
gebräuchlich.
Prüfung von Führungen
Die nachfolgenden Bilder geben einen Überblick über gängige Prüfmethoden für die
Genauigkeit von Führungen.
Bild 16: Prüfmethoden für Geradheit: Lineal, Spanndraht in Verbindung mit einem
Messmikroskop, Fluchtungsfernrohr und Interferometer
FK 12
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 4: Antriebskonzepte
Bild 17: Prüfmethoden für Geradheit mittels Winkelmessung (schrittweises Abtasten der
Messfläche im Abstand der Auflagepunkte): Neigungsmessgerät, Autokollimator,
Interferometer
Bild 18: Prüfmethoden für Rechtwinkligkeit anhand eines Prüfzylinders, einer Drehachse
oder eines Winkels
Eine umfassendere Zusammenstellung findet sich in der DIN/ISO 230-1
(Abnahmebedingungen für Werkzeugmaschinen). Es werden vor allem mechanische
(Lineale, Messtaster, etc.) und optische Messverfahren behandelt. Ein hochgenaues
Messverfahren, das einfach nachvollzogen werden kann, ist die Interferometrie.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
FK 13
Versuch Nr. 4: Antriebskonzepte
4 Hausaufgaben
1. In von Hand bedienten Maschinen (z. B. Werkzeugfräsmaschinen, etc.) werden zum
Antrieb der Schlitten meist normale Gewindespindeln (keine Kugelumlaufspindeln)
eingesetzt. Ändert man die Drehrichtung der Spindel, so lässt sich diese durch das Spiel
zwischen Spindel und Mutter ein kurzes Stück frei drehen, bevor sie den Schlitten wieder
mitnimmt (Umkehrspiel, sogenannter „toter Gang“). Skizzieren Sie eine Konstruktion, wie ein
solcher Gewindeantrieb spielfrei gestaltet werden könnte, so dass kein Umkehrspiel mehr
auftritt.
2. Bei manuellen Drehmaschinen werden wegen der guten Dämpfung und Steifigkeit meist
Gleitführungen eingesetzt. Können Sie sich denken, wieso die Führung des Z-Schlittens als
Prismen- und nicht als Schwalbenschwanzführung realisiert wird?
3. Die meisten aktuellen CNC-Werkzeugmaschinen besitzen keine Gleitführungen, sondern
Kugel- oder Rollenumlaufführungen. Was könnten die Gründe sein?
4. Sie haben eine Gewindespindel (normales metrisches Spitzgewinde) und eine
Trapezgewindespindel mit gleichem Durchmesser, gleicher Steigung und aus gleichem
Material. Die Gewindespindel ist gerade noch selbsthemmend. Ist die Trapezgewindespindel
auch selbsthemmend oder nicht? Warum?
5. Gegeben ist eine Festkörpergelenkführung nach folgender Skizze:
Bild 19: Schema der Festkörperführung
Alle Elemente der Führung bestehen aus dem gleichen Material. Die federnden Elemente
sind 0,3 mm dick, 5 mm hoch und 20 mm tief (senkrecht zur Papierebene). Die beiden
senkrechten Elemente haben einen Querschnitt von 10 mmx20 mm und sind 95 mm hoch.
Der Abstand der Gelenkpunkte am Querbalken beträgt 100 mm; die tiefe des Querbalkens
20 mm. Wie dick muss der Querbalken sein, damit er bei mittigem Kraftangriff und mittiger
Messung die gleiche Steifigkeit hat wie die Verbindung des Balkens zum Fundament (die
senkrechten Elemente aus je zwei Festkörpergelenken und einem Druckstab)? Verwenden
Sie die Gleichungen für Druckstäbe bzw. für den Biegebalken die Gleichung für einen
statisch bestimmt gelagerten Balken (Formelsammlung)!
FK 14
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 4: Antriebskonzepte
5 Praktikumsaufgaben:
Um Aussagen über die Eignung des x-y-Tisches im Praktikum für einen Drucker zu
bestimmen, sollen im Folgenden wichtige Kenngrößen der Führungen messtechnisch erfasst
werden. Dazu werden der Tisch und sein Antrieb vermessen.
1. x-y-Tisch:
Der Praktikumstisch verfügt über runde Führungen (Silberstahl) mit Kugelbüchsen, um die
Reibungskräfte zu senken. Die Antriebskraft der Schrittmotoren wird über einen Zahnriemen
(Breite 9 mm) auf den Tisch übertragen. Der Durchmesser der Führungsstäbe beträgt
10 mm.
Vermessen Sie die Führungssteifigkeit:
a)
Die Belastungseinrichtung überträgt eine Zugkraft mittig auf den Tisch. Für deren
quantitative Messung steht eine Waage zur Verfügung. Bringen Sie die Messuhr in
einer sinnvollen Position am Tisch an! Überlegen Sie, welche Messfehler durch eine
falsche Positionierung entstehen könnten!
b)
Belasten Sie nun den Tisch mit Kräften bis zu 100 N in 5-N-Schritten, indem Sie die
Schraube der Belastungseinrichtung verstellen! Lesen Sie jeweils den Messwert an
der Messuhr ab (Vergessen Sie nicht, die Messuhr zu Beginn der Messung zu
nullen)! Tragen Sie alle Messwerte in eine Tabelle und ein Diagramm mit geeigneten
Achsskalierungen ein!
c)
Interpretieren Sie Ihr Diagramm! Welche Kenngrößen können Sie daraus
entnehmen? Betrachten Sie dazu sorgfältig die Konstruktion des Tisches!
Vermessung der Rechtwinkligkeit:
d)
Montieren Sie den Messwinkel auf der Grundplatte! Befestigen Sie die Messuhr in der
Halterung für die x-Achse! Justieren Sie den Winkel so, dass die Messuhr beim
Verfahren der x-Achse möglichst wenige Ausschläge zeigt! Der Messwinkel ist jetzt
zum Tisch exakt positioniert. Benutzen Sie nun die Messuhr in der Halterung für die
y-Achse! Ermitteln Sie durch definiertes Verschieben des Tisches den Winkel
zwischen beiden Achsen!
Antriebssteifigkeit:
e)
Blockieren Sie den Motor mit der dafür vorgesehenen Klemmvorrichtung! Klappen Sie
dazu die Belastungseinrichtung um! Bringen Sie die Messuhr in Position! Vermessen
Sie wie in b) die Steifigkeit! Belasten Sie mit bis zu 100 N in 10-N-Schritten! Zeichnen
Sie ebenso eine Tabelle und ein Diagramm!
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
FK 15
Versuch Nr. 4: Antriebskonzepte
f)
Lassen Sie die Blockade im Motor! Klappen Sie die Belastungseinrichtung um 180°
um! Messen Sie Steifigkeit des Tisches nun in der anderen Richtung (Kurve in das
vorhandene Diagramm eintragen)! Interpretieren Sie Ihre Ergebnisse!
6 Literatur
•
•
•
Dubbel, „Taschenbuch für den Maschinenbau“, 20. Auflage, W. Beitz und K.–H.
Grote, Springer 2001
DIN-ISO 230-1 und ggf. 230-2,
Vorlesungsskriptum „Feingerätebau“, Lehrstuhl für Mikrotechnik und
Medizingerätetechnik, Prof. T. Lüth, 2006, TUM München
•
Vorlesungsskriptum „Mikrotechnische Sensoren und Aktoren“, Lehrstuhl für
Mikrotechnik und Medizingerätetechnik, Prof. T. Lüth, 2006, TUM München
7 Ergänzende Informationen
Der folgende Abschnitt fasst kurz einige weitere Erkenntnisse zusammen, die während der
Durchführung des Praktikumsversuchs gewonnen werden können. Er ist für die Vorbereitung
auf das Praktikum nicht relevant.
Längenmessungen allgemein: Um Fehler durch Winkelabweichungen möglichst klein zu
halten, ist darauf zu achten, dass der Prüfling (die zu messende Länge) zur
Maßverkörperung fluchtet (Abbe’sches Komparatorprinzip), siehe Bild 22.
Bild 22: Abbe’sches Komparatorprinzip
Messung von Führungs- und Lagerspiel: Der Schlitten bzw. die Spindel wird durch ein
Gewicht (oft reicht das Eigengewicht) oder eine weiche Feder vorgespannt. Wie bei der
Steifigkeitsmessung wird die Verformung gemessen, die durch eine in entgegengesetzter
FK 16
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 4: Antriebskonzepte
Richtung wirkende Kraft verursacht wird. Bei einer bestimmten Kraft ergibt sich ein Sprung in
der Federkennlinie, der dem Lagerspiel entspricht.
Dabei ist u. a. auf Folgendes zu achten:
- Kraft- und Messrichtung sollten in einer Mittelebene durch die Führung/das Lager liegen.
- Wenn das Spiel einer Führung/eines Lagers im eingebauten Zustand gemessen werden
soll, dürfen sich durch die anderen Führungen/Lager des Schlittens bzw. der Spindel keine
Verspannungen ergeben, die das Messergebnis verfälschen.
Bild 23: Messung des Führungsspiels
Konstruktion steifer Schraubverbindungen: Für die Steifigkeit (besonders die
Kippsteifigkeit) einer Schraubverbindung ist nicht primär die Größe der Kontaktflächen
bedeutsam, sondern die richtige Lage zum Kraftfluss. Statt einer großen Fläche (die
aufgrund von Formabweichungen oder Verschmutzung die Kräfte über unvorhersehbar
verteilte Berührpunkte überträgt) sind definierte Kontaktflächen im Bereich der
Verbindungsschrauben vorzuziehen.
Verstelleinrichtungen im Sub-µm-Bereich: Auch mit einem üblichen „groben“ Gewinde
lassen sich hochgenaue Wegverstellungen realisieren. Dabei wird der größte Teil des
Schraubenweges im Schaft und in den Kontaktstellen der Schraube in elastische
Verformung umgesetzt. Die Schraube spannt sich gegen einen steif gelagerten Körper, der
die eigentliche Verstellbewegung ausführt.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
FK 17
Versuch Nr. 5: Motoren
Beschreibung zu Versuch Nr. 5:
Motorkonzepte
Michael Scheuenpflug, überarbeitet von Markus Kagerer
1. Einordnung
Im vorangegangenen Versuch wurden unterschiedliche Führungen und Antriebskinematiken
für den Praktikumsdrucker untersucht und ausgewählt. Um eine gezielte Ansteuerung der
Bewegung des Druckers zu ermöglichen, soll in folgendem Praktikumstermin ein
Antriebskonzept für die Bewegung des Druckkopfes untersucht und ausgewählt werden. Der
Druckkopf in einem herkömmlichen Tintendrucker wird entlang seiner Führung auf einer
Geraden über das zu druckende Papier bewegt. Die Bewegung des Vorschubs wird über die
Transportwalze des Papiers ermöglicht. Im Falle des zu bauenden Wachsdruckers ist diese
Trennung der Zustellbewegung in x- und y-Richtung nicht möglich. Der Druckkopf muss in
zwei Dimensionen auf der Druckebene platziert werden können.
Für den Antrieb der bereits ausgewählten Kinematik ergeben sich unterschiedliche
Möglichkeiten, welche nach verschiedenen Kriterien eingeteilt werden können: Neben einer
Bewegungseinteilung in linear bzw. rotatorisch wirkenden Stellgliedern können auch
unterschiedliche physikalische Antriebskonzepte zum Einsatz kommen.
Bei der Antriebsauswahl müssen die Umweltbedingungen sowie die Anforderungen (Hub,
Leistung etc.) an den Aktor berücksichtigt werden. Entscheidend für ein gutes Druckbild,
sowohl bei kommerziellen Tintendruckern, als auch bei Sonderformen wie dem
Wachsdrucker, ist eine hohe Auflösung. Hierzu sind die Erzeugung kleiner Tropfen sowie
eine möglichst hohe Positioniergenauigkeit (auch Wiederholgenauigkeit) des Druckkopfs
notwendig. Dabei tragen Eigenschaften wie eine hohe Steifigkeit der gesamten Anordnung
ebenso zu einer exakten Positionierung bei, wie auch andere Eigenschaften, wie z. B.
auftretender Schlupf in der Antriebskinematik. Auch Leistungsdefizite des Antriebsmotors
verschlechtern das Druckergebnis.
Neben aller geforderter Präzision und Genauigkeit darf aber auch die maximale
Geschwindigkeit der Verfahrachsen nicht signifikant beeinträchtigt werden. Gerade im
Hinblick auf die dynamischen Eigenschaften gibt es zwei unterschiedliche Prinzipien der
Positionsbestimmung
und
Überwachung
der
Verfahrachsen.
Die
externe
Längenmesstechnik bringt den Vorteil einer sehr genauen und unverfälschten Messung,
jedoch auch eine aufwendige Auswertung, zusätzliche Bauteile und stark erhöhte Kosten mit
sich. Antriebskonzepte mit einer integrierten Lagebestimmung (z. B. über Drehratensensoren
am Motor) hingegen zeigen sich anfälliger bei Störungen.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MOT 1
Versuch Nr. 5: Motoren
2. Theorie
Der Antrieb der Bewegungskinematik für den Wachsdrucker muss über einen Motor
erfolgen. Da es sich hierbei nicht um einen Standardantrieb wie den Elektromotor handeln
muss und eine Vielzahl unterschiedlicher Antriebsmöglichkeiten kommerziell verfügbar sind,
ist die Bezeichnung Aktor für eine uneingeschränkte Auswahl an Antriebsmöglichkeiten
besser geeignet.
Ein Antriebskonzept setzt sich in den meisten Fällen aus zwei funktionalen Gruppen
zusammen; der Steuerung und dem oder den Aktoren.
Bild 1: Blockschaltbild eines Aktors
Vergleicht man die Steuerung mit dem Gehirn eines Geräts, so sind die Aktoren die Muskeln.
Die Vielfalt an realisierten Aktoren ist riesig. Es gibt standardisierte Baugruppen mit
konventionellem Wandlerkonzept, z. B. für einfache Rotations- oder Translationsbewegungen bei Rechnerendgeräten, in der Handhabungstechnik oder im Kfz-Bereich
ebenso wie Spezialentwicklungen, z. B. als Tropfenerzeuger in Tintendruckern, als
hochgenaue Antriebseinheiten zur Ausrichtung tonnenschwerer Teleskope oder als SpiegelPositioniereinheit zur Strahlablenkung in der Laserlithographie.
Bereits im allgemeinen Geräteschema ist zu erkennen: Der Aktor erhält eingangsseitig nur
Information von der Steuerung, ausgangsseitig leistet er Arbeit und muss Energie abgeben.
Hierzu muss er zusätzlich mit Energie versorgt werden. Hinter dem Aktor verbirgt sich also in
jedem Fall mehr als nur der elektromechanische Wandler. Für eine Bewegungsaufgabe
könnte es so aussehen: Ein oder mehrere Regelkreise, die Leistungselektronik, der
eigentliche elektromechanische Wandler und die Mechanik zur Anpassung der Bewegung an
die entsprechende Aufgabe im Prozess. Aus Information und Hilfsenergie wird damit
elektrische Energie, die in mechanische Energie gewandelt und angepasst wird.
Ein typisches Aktorprinzip, das in der Mikrotechnik häufigen Einsatz findet, ist der
Piezoaktor. Die charakteristischen Eigenschaften von Piezokeramik und die möglichen
Bauformen von Aktoren aus Piezokeramik wurden in einem vorangegangenen Versuch 1
bereits untersucht. Piezoaktoren zeichnen sich durch sehr kleine Verstellbewegungen bei
hohen Kräften, besonders in der Bauform als Stapelaktor, aus. Diesen Effekt macht man sich
bei der Anwendung des Piezoaktors z. B. in einem Inchworm-Linearantrieb zu Nutze. Über
MOT 2
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 5: Motoren
abwechselnde Klemm- und Schubbewegungen der Piezoaktoren wird eine Schubstange in
linearer Richtung weiterbewegt.
Das quantitativ am häufigsten verwendete Aktorprinzip ist der oben bereits genannte
Elektromotor. Dabei lassen sich mehrere Motortypen unterscheiden: Eine erste
Unterscheidungsmöglichkeit bietet die Art der Energieversorgung (Wechsel- sowie
Gleichstrommotoren).
2.1 Gleichstrommaschine
Unter einer Gleichstrommaschine versteht man einen Elektromotor, der mit Gleichstrom
betrieben wird, oder einen Generator, der umgekehrt mechanische Energie in Gleichstrom
wandelt. In einigen Anwendungsfällen kann ein Gerät auch beide Funktionen erfüllen.
Die Gleichstrommaschine besteht aus einem unbeweglichen Teil, dem Stator, und einem
drehbar gelagerten Teil, dem Rotor. Die meisten Gleichstrommotoren sind als Innenläufer
ausgeführt: der Rotor ist der innere Teil, der Stator der äußere. Beim Außenläufer ist es
umgekehrt. Bei konventionellen Gleichstrommaschinen besteht der Stator aus einem
Elektromagneten oder bei kleineren Maschinen einem Permanentmagneten. Der Rotor wird
bei konventionellen Maschinen Anker genannt.
Zu den Vorteilen der Gleichstrommaschinen gehören ein gutes Anlaufverhalten und eine
gute Regelbarkeit.
Abbildung 2: Schematische Darstellung einer Gleichstrommaschine
Die Wicklung des Ankers wird über den Kommutator angeschlossen. Die Kontakte
(„Bürsten“) des Kommutators sind so aufgebaut, dass sie während der Drehung ständig die
Polung der Ankerwicklung wechseln. Sie sind aus einem Material gefertigt, welches gut
elektrisch leitet, sich im Betrieb ein wenig abreibt und sich somit selber „schmiert“ (meistens
enthalten sie Graphit- und Kupferstaub). Somit ist beim Gleichstrommotor die Drehbewegung
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MOT 3
Versuch Nr. 5: Motoren
gewährleistet. Beim Generator wird durch die Funktion des Kommutators aus dem
Wechselstrom des Rotors Gleichstrom.
2.2 Typen von Gleichstrommotoren
Nach der Art der Schaltung von Rotor und Statorwicklung unterscheidet man:
•
Die Reihenschlussmaschine
Abbildung 3: Reihenschlussmaschine
Die Reihenschlussmaschine ist eine Abwandlung des Gleichstrommotors zur Nutzung von
Wechselstrom. Hier sind Erregerwicklung und Ankerwicklung in Reihe geschaltet. Dadurch
wechseln Erregerfeld und Ankerstrom ihre Richtung synchron, so dass eine Speisung mit
Wechselstrom möglich wird. Solche Maschinen werden als Bahnantriebe in
Wechselstromnetzen eingesetzt. Unter dem Begriff Universalmotor oder Allstrommotor
werden die Antriebe von Haushaltsmaschinen, Bohrmaschinen etc. zusammengefasst.
Die Drehzahl von Reihenschlussmotoren ist stark lastabhängig. Sinkt das abgegebene
Drehmoment, so steigt wegen des geringeren Stroms und der damit einhergehenden
Feldschwächung die Drehzahl des Ankers. Das kann so weit führen, dass der Motor
„durchgeht“, was bedeutet, dass sich der Motor wegen der auftretenden Fliehkräfte selbst
zerstört. Deshalb sollten Reihenschlussmotoren mit einer Grundlast (Motorlüfter, Getriebe
etc.) betrieben werden.
MOT 4
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 5: Motoren
•
Die Nebenschlussmaschine.
Abbildung 4: Nebenschlussmaschine
Bei der Nebenschlussmaschine sind Erreger- und Ankerwicklung parallel geschaltet. Ein
Wechselspannungsbetrieb ist nicht üblich, da hierfür Erreger- und Ankerstrom in Phase sein
müssten, d. h. Anker- und Erregerwicklung gleiche Induktivität (und Widerstand) haben
müssen. Oft wird nicht zwischen Nebenschluss- und fremderregter Maschine unterschieden
und dabei übersehen, dass eine Verringerung der Ankerspannung zu einer Feldschwächung
führt. Nebenschlussmotoren können bei Unterbrechung des Erregerkreises durchgehen.
•
Glockenanker-Maschinen.
Abbildung 5: Vorderansicht eines Rotors einer Glockenanker-Maschine der Firma „Maxon
motor AG“
Kleine Maschinen bis etwa 100 Watt mit Permanentmagnet können auch mit einem hohlen
Rotor gebaut werden. Der Rotor ist eisenlos selbsttragend gewickelt und kunstharzgetränkt.
So wird das Trägheitsmoment des Rotors verringert und der Motor kann schneller
beschleunigen.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MOT 5
Versuch Nr. 5: Motoren
Der Stator, ein Permanentmagnet, liegt in diesem Fall innerhalb des Rotors. Das außen
liegende Motorgehäuse aus Eisen bildet den notwendigen Rückschluss für den
magnetischen Fluss des Stators. Der elektrische Aufbau entspricht der ersten Illustration.
Durch den eisenlosen Aufbau des Rotors bildet der Motor kein Rastmoment aus, er lässt
sich vollkommen frei drehen.
Da im Gegensatz zu allen anderen Motoren im Betrieb keine Eisenteile ummagnetisiert
werden müssen, ist dieser Motor frei von Eisenverlusten und erreicht dadurch höhere
Wirkungsgrade.
Der Scheibenläufermotor ist ähnlich aufgebaut, allerdings ist die Wicklung nicht in Form
eines Zylinders sondern als Scheibe ausgeführt.
2.3 Phänomene beim Gleichstrommotor
•
Ankerrückwirkung
Da der Anker stromdurchflossen ist, bildet sich auch um diesen ein magnetisches Feld.
Dieses verstärkt das Hauptfeld auf der einen Seite des Leiters und schwächt es auf der
anderen. Insgesamt führt dies dazu, dass sich der neutrale Bereich, in dem die Polung des
Stromes umgeschaltet werden muss, etwas verspätet, d. h. er verschiebt sich in
Drehrichtung. Da sich jedoch der Kommutator nicht anpasst (also stets senkrecht zu den
Hauptfeldlinien umschaltet und nicht senkrecht zu den „effektiven“ Feldlinien), liegt zu dem
Zeitpunkt des Umschaltens noch eine Induktionsspannung an den Kohlebürsten an und es
kommt zur Funkenbildung, dem Bürstenfeuer.
•
Gegenspannung
Der Rotor dreht sich im Motor innerhalb des Statorfeldes. Nach dem Generatorprinzip wird
so in der Spule eine Spannung induziert. Diese induzierte Spannung wirkt der angelegten
Netzbetriebsspannung und somit auch dem Rotorstrom entgegen, daher der Name
Gegenspannung.
Rotorstrom = (Betriebsspannung - Gegenspannung) / Rotorwiderstand
Die Gegenspannung ist abhängig von der Drehzahl des Rotors. Bei Motorstillstand gibt es
also keine Gegenspannung. Deshalb liegt an der Rotorspule die volle Betriebsspannung. Der
Widerstand der Rotorspulen ist sehr klein und somit der Strom im Moment des Einschaltens
sehr groß, ohne Begrenzung des Anlaufstromes würde also die Rotorspule zerstört werden.
Drehzahl = Null; Gegenspannung = Null; Betriebsspannung = Spannung an der Rotorspule;
Strom der Rotorspule sehr hoch.
Der Anlaufwiderstand wird in Reihe zur Rotorspule geschaltet. Nach dem Hochlaufen wird
dann der Anlaufwiderstand bis auf Null reduziert.
MOT 6
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 5: Motoren
2.4 Wechselstrommaschinen
Wechselstrommaschinen unterscheiden sich in Synchron- und Asynchronmaschinen.
Eine Drehstrom-Asynchronmaschine, auch Induktionsmaschine, Asynchronmotor oder
Kurzschlussläufer (engl. Squirrel Cage Motor) genannt, ist ein häufig verwendeter
Elektromotor, der mit Drehstrom betrieben wird. Bei der Asynchronmaschine ist die Drehzahl
des Läufers im Motorbetrieb geringer als die Drehzahl des antreibenden
elektromagnetischen Drehfeldes, d. h. der Läufer rotiert asynchron zum Drehfeld. Im
Generatorbetrieb rotiert der Läufer schneller als das Magnetfeld und speist so Energie in das
Netz ein.
Asynchronmotor: Aufbau und Funktionsweise
Der Ständer oder Stator besteht aus dem Gehäuse, dem Ständerblechpaket und der darin
eingelegten Ständerwicklung.
Die für die Spannungsinduktion bzw. den Läuferstrom erforderliche Magnetflussänderung
wird vom Ständer durch ein umlaufendes Drehfeld erzeugt. Elektrisch gesehen ist eine
Asynchronmaschine ein kurzgeschlossener Drehstrom-Transformator mit Luftspalt, dessen
Sekundärwicklung (der Rotor) drehbar gelagert ist.
Die Rotordrehzahl ist um die Schlupfdrehzahl gegenüber dem netzsynchronen
Statordrehfeld verringert; dies ist bei Belastung erforderlich, um den Rotorstrom und dessen
Feld zu erhalten, sodass mechanische Leistung abgegeben werden kann. Bei Motorleerlauf
ist die Schlupfdrehzahl sehr niedrig. Sie muss nur zur Deckung der Lagerreibungsverluste,
des wegen der sehr niedrigen Frequenz (etwa 1 % der Netzfrequenz) geringen
Käfigwicklungs-Stromes und der ebenfalls sehr geringen Verluste im Rotorblechpaket (sehr
niedrige Magnetisierung und niedrige Frequenz) ausreichen. Der Läufer kann immer nur eine
kleinere Drehzahl annehmen, als die Synchrondrehzahl des Netzes vorgibt (bei
Motorbetrieb, als Generator: Läuferdrehzahl größer als Netzdrehzahl), darum auch der
Name Asynchronmaschine.
Dadurch, dass bei der Asynchronmaschine der Rotorstrom durch Induktion erzeugt wird und
nicht wie bei der Synchronmaschine durch die Erregerwicklung oder einen
Permanentmagneten, wird sie gelegentlich auch Induktionsmaschine genannt.
Die Drehmomenten- über Drehzahlkennlinie ist im Anlaufbereich bei diesem Motorprinzip
sehr ungünstig. Der Motor ist nicht in der Lage, unter vollem Lastmoment anzulaufen. Er
muss mit geringer Last auf etwa 90 % der Nenndrehzahl hochfahren, ehe er ein
nennenswertes Drehmoment abgeben kann. Dieser Nachteil führte zunächst zur Entwicklung
des Schleifringläufers, bei dem an extra angebrachten Rotorschleifringen zusätzliche
Widerstände von außen an die gewickelte Rotorwicklung zwischen die drei
Außenleiterspannungen geschaltet werden, um so das maximale Drehmoment auch schon
bei der Drehzahl 0 zu erreichen.
Die Widerstände werden nur als Anlaufhilfe benötigt, sie werden nach dem Erreichen der
Nenndrehzahl durch Kurzschluss der Schleifringe ausgeschaltet.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MOT 7
Versuch Nr. 5: Motoren
Später wurde dann der Kurzschlussläufermotor entwickelt, dessen Rotor aus einem
geblechten Eisenkernläufer besteht, der seine „Wicklung“ mittels Aluminium-Druckguss in
vorhandenen Bohrungen erhält. Die Kurzschlusswicklung ähnelt einem Hamsterlaufrad
(englisch „squirrel cage motor“), daher die Bezeichnung Käfigläufermotor. Bei großen
Leistungen wird die Käfigwicklung aus Kupfer- oder Bronzestäben aufgebaut, die stirnseitig
in Kurzschlussringen verlötet werden.
Synchronmotor:
Eine Drehstrom-Synchronmaschine ist ein Elektromotor, der mit Drehstrom betrieben wird,
oder ein Generator, der Drehstrom erzeugt. Sie kann aber auch zur Blindleistungskompensation verwendet werden.
Die Maschine besitzt eine Außenwicklung (Statorwicklung), die ein magnetisches Drehfeld
erzeugt bzw. in welcher elektrischer Strom erzeugt wird. Der Rotor (Polrad) trägt zur
Felderzeugung entweder Permanentmagnete oder eine Erregerwicklung. Im zweiten Fall
werden zwar Schleifkontakte notwendig, über die jedoch nur ein vergleichsweise kleiner
Strom fließt und im Gegensatz zur Gleichstrommaschine nicht kommutiert wird, so dass das
Bürstenfeuer mit all seinen Konsequenzen für die Lebensdauer entfällt.
Bei schnelllaufenden großen Turbogeneratoren u. a. in Dampfkraftwerken sind auch
schleifringlose Erregungen über Außenpol-Synchrongeneratoren und mitrotierende
Gleichrichter (sog. RG-Sätze) Stand der Technik. Synchronmotoren sind permanent- oder
gleichstromerregte
Drehfeldmaschinen,
bei
denen
die
Drehzahl
gleich
der
Wechselspannungsfrequenz, geteilt durch die halbe Polzahl des Rotors, ist.
Über die Frequenz des zugeführten Wechselstroms ist die Drehzahl des Synchronmotors
exakt und winkelgenau regelbar. Ein Winkelgeber überprüft ständig die tatsächliche
Motorstellung und somit die tatsächliche Drehfrequenz. Bei starker Belastung hängt der
Motor dem Soll-Phasenwinkel geringfügig hinterher. Um einen Synchronmotor stufenlos in
der Drehzahl regeln zu können, muss ein Frequenzumrichter verwendet werden.
Die Synchronmaschine hat im Unterschied zur Drehstrom-Asynchronmaschine keinen
Schlupf. Bei der Synchronmaschine ist die Drehzahl des Läufers gleich der Drehzahl des
elektromagnetischen Drehfeldes, das heißt, der Läufer rotiert synchron zum Drehfeld.
Deshalb wird im Rotor keine Spannung induziert.
Schrittmotor:
Schrittmotoren als weiteres Elektromotormodell können als eine Sonderform der
Synchronmaschine betrachtet werden.
Die auf dem Markt befindlichen Schrittmotoren lassen sich in zwei Gruppen einteilen. Die
eine Gruppe bilden die permanentmagnetisch erregten Motoren, welche durch einen
Permanentmagneten im Rotor gekennzeichnet sind. Die andere Gruppe sind die
Reluktanzmotoren, die ohne Permanentmagneten auskommen.
MOT 8
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 5: Motoren
Das Prinzip und die wichtigsten Eigenschaften beider Gruppen werden im Folgenden kurz
beschrieben. Eine umfangreichere Darstellung findet sich in der zahlreichen Literatur über
Schrittmotoren.
Der Reluktanzmotor
Abbildung 6: Reluktanzschrittmotor
Das Reluktanzprinzip ist das älteste beim Bau von Schrittmotoren eingesetzte Prinzip.
Obwohl das Prinzipmuster solcher Motoren bereits Anfang des letzten Jahrhunderts
entwickelt wurden, kamen Reluktanzmotoren, als erste Schrittmotoren, erst Ende der 50er
Jahre, mit der steigenden Bedeutung der Digitaltechnik, auf den Markt. Das Prinzip des
Reluktanzmotors ist sehr einfach. Der Rotor besteht aus weichmagnetischem Material (z. B.
Weicheisen). Der Stator hat wenigstens drei Wicklungen deren Polschuhe sich
gegenüberstehen. Abbildung 6 zeigt einen Radialschnitt. Wird eine Phase bestromt, so wird
das Eisen von den Polen des Elektromagneten angezogen und richtet sich nach den
magnetischen Feldlinien aus. In dieser Stellung ist dann der Widerstand des magnetischen
Kreises, die Rekluntanz, am geringsten. Werden die Wicklungen in den bezeichneten
Abfolgen bestromt, so führt der Rotor eine kontinuierliche Drehbewegung aus.
Charakteristisch für den Reluktanzmotor ist, dass die Richtung der Bestromung nicht
geändert werden muss, und der Motor deshalb mit einer einfachen Ansteuerelektronik
auskommt. Beim Reluktanzprinzip können auf einfachem Wege sehr kleine Schrittwinkel
erreicht werden. Ihr Wirkungsgrad ist aber schlechter als bei permanentmagnetisch erregten
Motoren. Dies liegt daran, dass der Rotor erst durch das Statorfeld magnetisiert wird. Die
Magnetisierungsenergie für den Rotor muss daher zusätzlich von außen zugeführt werden.
Trotz seines niedrigen Preises und der einfachen Ansteuerung ist infolge dieses Nachteils
der Marktanteil des Reluktanzmotors am abnehmen. Er wird deshalb im Praktikum nicht
untersucht.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MOT 9
Versuch Nr. 5: Motoren
Der heteropolar permanentmagnetisch erregte Schrittmotor
Der Rotor eines solchen Motors besteht aus einem hartmagnetischen Material (z. B. Ferrit).
Entlang des Umfangs wechseln magnetische Nord- und Südpole einander ab. Der Stator
wird wieder durch die Polschuhe der von den Wicklungen gebildeten Elektromagneten und
durch den magnetischen Rückschluss gebildet. Der Schnitt in Abbildung 7 zeigt schematisch
einen solchen Motor mit einem Polpaar am Rotor. Um den Motor in Drehung zu versetzen
werden die beiden Phasen zunächst nacheinander in einer Richtung bestromt. Das gleiche
folgt dann mit der umgekehrten Stromrichtung. Der zweiphasige Motor kennt also vier
elektromagnetisch unterscheidbare Zustände.
Abbildung 7: heteropolar permanentmagnetischer Schrittmotor
Um den Schrittwinkel eines solchen Motors zu verkleinern, muss die Anzahl der Polpaare am
Rotorumfang erhöht werden. Die Tatsache, dass dabei die Mitten der Pole immer weiter
zusammenrücken
führt
bei
der
Herstellung
des
Magneten
bald
zu
Magnetisierungsproblemen. Schrittmotoren dieser Bauart haben deshalb kaum Schrittwinkel
unter 5 °.
Großer Verbreitung erfreut sich der nach diesem Prinzip arbeitende Klauenpolschrittmotor.
Dies ist eine Folge seiner fertigungs- und montagefreundlichen Konstruktion, die einen
besonders niedrigen Preis ermöglicht. Der aus massivem Blech gefertigte Stator bedingt
jedoch große Hysterese- und vor allem Wirbelstromverluste, die den Einsatz bei hohen
Schrittfrequenzen unmöglich machen.
Der homopolar permanentmagnetisch erregte Schrittmotor
Dieser Motor ist aus der Idee heraus entstanden, den Wirkungsgrad und den zweiphasigen
Aufbau, der durch den Einsatz des Permanentmagneten möglich wird, mit dem geringen
Schrittwinkel des Reluktanzmotors zu verbinden. Da dieser Motor beide,
permanentmagnetisches und Reluktanzprinzip, vereinigt, wird er oft auch als Hybridmotor
bezeichnet.
MOT 10
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 5: Motoren
Der Rotor dieses Motortyps besteht aus zwei genuteten ferromagnetischen Scheiben, die
zusammen mit einem dazwischen befindlichen, in axialer Richtung magnetisierten
ringförmigen Permanentmagneten auf eine Welle aufgepresst werden. Dadurch entstehen
zwischen Stator und Rotor zwei Luftspaltbereiche mit homopolarer Erregung. Abbildung 8
und Abbildung 9 zeigt schematisch den mechanischen Aufbau. Die hintere Rotorscheibe ist
dabei gegen die vordere um eine halbe Teilung versetzt. Ist nun die erste Spule (Index 1)
vorwärts bestromt, so stellen sich am Stator die magnetischen Pole wie gezeichnet ein. Der
Rotor stellt sich nun so ein, dass die Zähne der Nordscheibe den Stator Südpolen, und die
Zähne der Südscheibe den Stator Nordpolen gegenüberstehen. Wird nun die zweite Spule
vorwärts bestromt, so stellt sich derselbe Zustand für die mit zwei indizierten Statorpole ein.
Der Rotor rückt also einen Schritt weiter. Kehrt man den Strom nun zunächst in Phase eins
und dann in Phase zwei um, so rückt der Rotor weitere zwei Schritte fort.
Die Abfolge der Bestromung und deren Richtung unterscheiden sich also in keiner Weise
vom heteropolaren Motor. Die Ansteuerung ist also völlig gleich. Schrittmotoren nach dem
Hybridprinzip werden heute für Schrittwinkel bis herunter zu 0,9 ° gebaut. Da sie durch ihre
geblechte Ausführung des Eisenkreises relativ geringe Wirbelstromverluste aufweisen, sind
sie, besonders im Bereich mittlerer und höherer Schrittfrequenzen, sehr häufig anzutreffen.
Ihr Wirkungsgrad ist wesentlich besser als der des Reluktanzmotors, erreicht aber nicht den
des heteropolar permanentmagnetischen Motors.
Abbildung 8: Der homopolare permanentmagnetische Schrittmotor
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MOT 11
Versuch Nr. 5: Motoren
Abbildung 9: homopolarer permanentmagnetischer Schrittmotor im Schnitt
3 Ausprägung im Versuch
Abbildung 10: Blockschaltbild einer Schrittmotorsteuerung
Im Rahmen dieses Versuchs wird ein Schrittantrieb mit einem zweiphasigen Hybridmotor im
gesteuerten Betrieb untersucht. Das bedeutet, dass die elektrischen Größen an den
Motorwicklungen von einer Steuerung nach einem starren zeitlichen Raster vorgegeben
werden. Die Alternative dazu ist eine Regelung, bei der die zeitliche Abfolge durch die
Bewegung des Motors selbst gesteuert wird (Selbststeuerung).
Die Aufgabe einer Steuerelektronik für Schrittmotoren besteht darin, die Schritte in einer für
die Positionieraufgabe geeigneten Zeitfolge vorzugeben, und über Leistungsverstärker die
Motorwicklungen zu bestromen. Abbildung 10 zeigt ein Blockschaltbild einer solchen
Steuerung.
MOT 12
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 5: Motoren
3.1 Signalelektronik
Zur Signalelektronik gehören der Indexer und der Translator. Der Indexer gibt abhängig von
einem Positionierbefehl (z. B. „Drehe schnellstmöglich 100 Schritte nach rechts“) an seinem
Eingang die nötigen Schrittimpulse und ein Richtungssignal am Ausgang aus. Der Translator
übersetzt diese in Signale, die die Bestromungsrichtung der Motorwicklungen festlegen.
Diese werden dem Leistungsteil zugeführt. Während Indexer und Translator bei den ersten
Schrittmotoren in hybrider Technik ausgeführt waren, werden heute für beide Aufgaben fast
nur noch Mikroprozessoren eingesetzt. Man muss sich dabei vor Augen halten, dass ein
einziges Mikroprozessorsystem, dessen Bauteilpreis den Preis eines Schrittmotors kaum
übersteigt, die Signale für mehrere Schrittmotoren gleichzeitig erzeugen kann. Sämtliche
Antriebe eines Gerätes werden dann von einem Prozessor gesteuert.
3.2 Leistungselektronik
Die Leistungselektronik hat die Aufgabe auf ein Signal des Translators (TTL-Logik) den
Strom in einer Wicklung in der gewünschten Richtung ein- bzw. auszuschalten. Es gibt
hierbei zwei wesentliche Methoden um Schrittmotorspulen zu bestromen:
Unipolare Ansteuerung:
Hierfür sind nur Motoren mit sechs oder acht Drähten geeignet. Die Leistungselektronik kann
auf vier Transistoren im Schalterbetrieb beschränkt bleiben. Die Mittelabgriffe der Spulen
werden mit der Masse verbunden. Die Transistoren schalten abwechselnd jeweils die andere
Spulenhälfte an die Betriebsspannung (siehe Abbildung 11, Nr. 2 und Nr. 4). Dadurch
können die notwendigen unterschiedlichen Polungen einer Spule erreicht werden. Unipolare
Motoren sind verhältnismäßig teuer.
Bipolare Ansteuerung:
Mit einer solchen Schaltung können alle Schrittmotortypen betrieben werden. Sie ermöglicht
es, die Spule in beiden Richtungen zu bestromen. Hierfür sind jedoch zwei TransistorVollbrücken mit jeweils vier Transistoren notwendig. Die Logik für die Ansteuerung ändert
sich im Wesentlichen nicht. Die Transistorvollbrücke erfordert aber einen wesentlich höheren
Schaltungsaufwand.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MOT 13
Versuch Nr. 5: Motoren
Abbildung 11: Uni- und bipolare Anbindung von Schrittmotoren
Wird über den Transistor eine elektrische Spannung an die Wicklung gelegt, so fließt in ihr
bekanntlich nicht sofort der maximale Strom, sondern er steigt gemäß der folgenden
Gleichung an:
R
( − ⋅t )
U
I (t ) = ⋅ (1 − e L )
R
Die Anstiegszeit TAnstieg = L/R liegt bei Schrittmotoren im Bereich von 1 ms. Bei vielen
Antriebsaufgaben wird die Feldrichtung aber in wesentlich kürzeren Zeitabständen
umgeschaltet. Hier muss die endliche Anstiegszeit berücksichtigt werden. Die Anstiegszeit
kann beispielsweise durch einen vor die Wicklung geschalteten Widerstand (R) verringert
werden. Dies führt aber zu einer Verringerung des Wirkungsgrads. In größeren
Schrittmotorantrieben werden deshalb sogenannte Chopper-Treiber eingesetzt.
3.3 Synchronismus und Schrittverlust
Schaltet man das Feld im Schrittmotor langsam Schritt für Schritt weiter, so wird der Rotor
ruckartige Bewegungen machen. Steigert man die Frequenz langsam, so wird durch die
integrierende Wirkung der vorhandenen Trägheitsmomente die schrittweise Bewegung in
eine kontinuierliche Drehbewegung übergehen. Die Zeit Ts bezeichnet dabei die Dauer eines
Schrittes. Ihr reziproker Wert fs = 1/Ts wird als Schrittfrequenz bezeichnet. Wenn nun die
mittlere Geschwindigkeit des Rotors genau so groß ist, dass er sich in der Zeit Ts um einen
Schrittwinkel αS dreht, so spricht man von Synchronismus. Die synchrone
Winkelgeschwindigkeit ergibt sich zu:
MOT 14
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 5: Motoren
ΩS = α S ⋅ fS
Neben der Winkelgeschwindigkeit im Synchronismus ist noch die absolute Winkelposition
des Rotors von wesentlicher Bedeutung. Sie bestimmt, wie im Fall eines statischen
Statorfeldes, das abgegebene Drehmoment. Um bei der Beschreibung der Zusammenhänge
von der Größe des Schrittwinkels unabhängig zu werden, bezieht man sich auf den
Phasenwinkel des elektrischen Wechselstroms. Man spricht dann vom „elektrischen Winkel“
αE. Er hängt mit dem mechanischen Drehwinkel αM beim zweiphasigen Motor in folgender
Weise zusammen:
αE =π / 2⋅
αM
αS
Mit Einführung des el. Winkels erhält man die statische Drehmomentkennlinie in
formelmäßiger Darstellung:
M = −i ⋅ K ⋅ sin(α E )
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MOT 15
Versuch Nr. 5: Motoren
M
α
M
c
α
Abbildung 12: Drehmomententwicklung beim Schrittmotor
Hier ist der Nullpunkt des Winkels die magnetische Raststellung. Diese wandert nun mit der
Schrittfrequenz um je einen Schritt weiter. Entsprechend wandert die statische DrehmomentKennlinie auf der Ortsachse weiter. In Abbildung 12 deuten die gestrichelten Linien die
statische Kennlinie an aufeinander folgenden Orten der magnetischen Raststellung an.
Bewegt sich der Rotor, so läuft das abgegebene Drehmoment auf einer dieser Kennlinien.
Sobald er einen Schritt weiter geschaltet wird, springt er auf eine andere. Je nachdem, ob
MOT 16
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 5: Motoren
der Rotor der magnetischen Raststellung nacheilt (oben) oder voreilt (unten), wird ein
antreibendes oder bremsendes Moment abgegeben. Im statischen Fall kann nur ein
begrenztes Drehmoment abgegeben werden. Wird dieses durch statische oder dynamische
Lastmomente am Motor überschritten, so kann der Motor dem elektrischen Feld nicht mehr
folgen. Er kommt außer Tritt. Man spricht auch von einem Schrittverlust.
Bei Positionieraufgaben ist ein Schrittverlust unbedingt zu vermeiden, denn beim Betrieb
ohne Rückmeldung der Rotorstellung (Open-Loop-Betrieb) kann man die aktuelle
Rotorstellung nur durch Mitzählen der ausgegebenen Schritte bestimmen. Man muss also
davon ausgehen, dass der Rotor dem elektrischen Feld gefolgt ist.
Die Notwendigkeit, Schrittverlust zu vermeiden, führt zu wesentlichen Restriktionen in der
dynamischen Betriebsweise des Motors.
3.4 Die Dynamische Drehmomentkennlinie
Um nun den Schrittantrieb so auslegen zu können, dass kein Schrittverlust auftritt, ist es
erforderlich, das maximale Drehmoment zu kennen, welches der Motor abgeben kann.
Dieses ist von der Schrittfrequenz abhängig.
Obwohl die statische Drehmomentkennlinie, von der das maximale dynamische
Drehmoment abgeleitet wird, auch bei hohen Frequenzen ihre sinusförmige Gestalt
beibehält, wird ihre Amplitude geringer. Diese ist dem Strom proportional. Infolge der
endlichen Anstiegszeit kann aber bei höheren Frequenzen der Strom nicht mehr bis zu
seinem Maximalwert ansteigen.
Die Wicklung wird nun unabhängig von der Frequenz mit einer konstanten Spannung
angesteuert. Die Frequenzabhängigkeit des Stromes kann nun mit den Ergebnissen der
Wechselstromlehre
gefunden
werden.
Bekanntlich
ist
die
Impedanz
(Wechselstromwiderstand) einer Reihenschaltung eines ohmschen Widerstands und einer
Induktivität gegeben durch:
Z=
(R
2
+ (ω • L )
2
)
Die Kreisfrequenz der Spannung hängt nun mit der Schrittfrequenz in folgender Weise
zusammen:
ω = 2π • fs
Damit hat man für die Frequenzabhängigkeit des Moments wegen der Proportionalität des
Stromes:
M = M0
1 + π 2 4 • ( f s • L R)
2
Dadurch erhält man die dynamische Drehmomentkennlinie. Versuche mit Schrittmotoren
zeigen, dass in der Realität nicht alle Betriebspunkte unter der Kennlinie zu einem stabilen
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MOT 17
Versuch Nr. 5: Motoren
Lauf des Schrittmotors führen. Dies ist beispielsweise auf eine Schwingungsanregung des
Rotors durch das schrittweise Fortschalten des Feldes zu erklären. Außerdem ist hier der
Einfluss der im Motor induzierten Gegenspannung vernachlässigt. Diese bewirkt bei höheren
Frequenzen eine zusätzliche Verminderung des Drehmoments.
Deshalb werden die dynamischen Kennlinien des Motors vom Hersteller messtechnisch
bestimmt und im Datenblatt angegeben.
3.5 Start-Stopp-Frequenz
Bei den meisten Antriebsaufgaben lässt sich sicherstellen, dass das statische Lastmoment
das maximale Moment nicht überschreitet. Wesentlich kritischer sind die dynamischen
Belastungen. Solche treten besonders bei der sprungförmigen Änderung der synchronen
Geschwindigkeit auf.
Ein besonders einfaches Steuerkonzept besteht nun darin, bei stillstehendem Motor eine
Wechselspannung fester Frequenz aufzuschalten; und mit dieser Frequenz, die dem
gewünschten Drehwinkel entsprechende Anzahl von Schrittimpulsen auszugeben und die
Impulsreihe dann zu stoppen. Dies wird als Start-Stopp-Betrieb bezeichnet.
Die erforderliche Beschleunigung und damit die dynamische Belastung des Motors werden
nun umso größer sein, je höher die Frequenz dieser Schrittimpulse ist. Die höchste
Frequenz, bei der dieser Betrieb möglich ist, ohne dass der Motor außer Tritt fällt, wird als
maximale Start-Stopp-Frequenz bezeichnet. Sie ist, außer von den Motordaten, von der
Ansteuerung und der Last abhängig. Ihre exakte Berechnung ist nur numerisch möglich. Es
sind verschiedene analytische Näherungslösungen bekannt. Ein Verfahren zur groben
Abschätzung dieser Frequenz wird im Folgenden angegeben.
Die Belastung des Motors lässt sich im Allgemeinen durch die dominierende dynamische
Belastung infolge eines Trägheitsmoments J, das sich aus dem Trägheitsmoment des Rotors
JMot und dem der Last JL zusammensetzt, darstellen. Die statische Last ist im Allgemeinen
wesentlich geringer und soll vernachlässigt werden. Es werden nun die dynamischen
Belastungen beim Anlauf in Abhängigkeit der Frequenz näherungsweise berechnet. Die
maximale Start-Stopp-Frequenz ergibt sich dann durch Schnitt dieser Kennlinie mit der
dynamischen Drehmoment Kennlinie.
Man nimmt an, die magnetische Raststellung würde sich mit einer Konstanten, der
synchronen Drehzahl bewegen. Der Rotor ist durch magnetische Kräfte wie durch eine
Drehfeder an die umlaufende magnetische Raststellung gekoppelt. Im Bezugssystem der
magnetischen Raststellung hat der Rotor also zum Zeitpunkt des Loslaufens eine
Geschwindigkeit, die betragsmäßig der synchronen Geschwindigkeit entspricht. Es beginnt
eine Drehschwingung die anfänglich folgende Energie enthält:
2
E Swing = 1 • J • Ω S
2
MOT 18
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 5: Motoren
Am nächsten Amplitudenmaximum gilt dann:
E Swing ⟩ 1 • M Swing • α Swing
2
Dann gilt für das höchstens auftretende dynamische Moment:
M Max = J •
ΩS
2
αS
Um die maximale Start-Stopp-Frequenz für ein gegebenes Trägheitsmoment zu ermitteln,
geht man nun folgendermaßen vor: Man trägt die Parabel gemäß Gleichung (MMax) in die
dynamische Drehmomentkennlinie ein. Die Abszisse des Schnittpunktes ergibt dann die
gesuchte Frequenz.
3.6 Hochlauf- und Bremsprogramme
Für viele Anwendungen wird die synchrone Drehzahl bei der maximalen Start-StoppFrequenz zu niedrig sein. Die Schrittfrequenz kann nun nach einem Frequenz-Zeit-Profil bis
zur gewünschten Maximalfrequenz gesteigert werden. Entsprechend muss die Frequenz
beim Abbremsen wieder langsam gesenkt werden. Dieses Profil ist von den äußeren
Belastungsverhältnissen abhängig. Um ein solches Frequenz-Zeit-Profil zu realisieren, ist
eine bestimmte zeitliche Abfolge von Schrittfortschaltungen erforderlich. Die zeitliche Abfolge
wird durch das Programm des steuernden Mikroprozessors festgelegt. Man spricht deshalb
von einem Hochlauf- und Bremsprogramm.
Ob der Schrittmotor in der Lage ist, einem vorgegebenen Frequenz-Zeit-Profil ohne
Schrittverlust zu folgen, kann überschlägig ermittelt werden, indem man es in ein DrehzahlZeit-Profil übersetzt und damit die auftretenden dynamischen und statischen Belastungen
berechnet. Durch Vergleich mit der dynamischen Drehmomentkennlinie ermittelt man, ob
eine Überlastung eintritt.
Das ermittelte kontinuierliche Frequenz-Zeit-Profil muss dann in eine zeitliche Folge von
Schrittfortschaltungen umgesetzt werden. Hier geht man folgendermaßen vor: Zur Einleitung
des Hochlaufs wird eine Schrittfortschaltung ausgegeben. Der Zeitpunkt für die Auslösung
des nächsten Schrittes ergibt sich nach der Formel:
1 (t i +1 − t ) = f S (t i +1 )
3.7 Geräte für die Versuchsdurchführung
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MOT 19
Versuch Nr. 5: Motoren
Der zu vermessende Motor weist folgende Kenndaten auf:
Schrittwinkel
1.8°
Phasenanzahl
2
Wicklungswiderstand
37,5 Ω
Wicklungsinduktivität L
45 mH
Rotorträgheitsmoment
16 gcm2
Nennspannung
12 V
Motortreiberbaustein
ST Elektronik GS D-200 1A
4 Hausaufgaben
1. Welche Funktion haben Permanentmagneten in Schrittmotoren?
2. Was bedeutet das für den Wirkungsgrad?
3. Was versteht man unter Open-Loop-Betrieb?
4. Welche Alternative ist denkbar (Vorteile, Nachteile)?
5. Wie groß ist der minimale Winkelfehler bei einem Schrittverlust?
6. Was ist der Vorteil der Sechs-Leiter-Technik?
7. Wie ändert sich das Drehmoment mit der Motorspannung?
8. Bei welcher Schrittfrequenz sinkt das Drehmoment infolge der Wicklungsinduktivität um
den Faktor
2 gegenüber M0?
9. Welche Ursache hat der schnellere Abfall bei der gemessenen Kennlinie?
MOT 20
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 5: Motoren
5 Praktikumsaufgaben:
In diesem Teil des Praktikums sollen die in der Vorbereitung untersuchten Eigenschaften
eines Schrittmotors praktisch nachvollzogen werden. Die Unterschiede zwischen Gleich-,
Wechselstrommaschinen und Schrittmotoren wurden bereits in den Grundlagen ausführlich
erklärt. Zwei grundsätzliche Unterschiede spiegeln sich auch in den Auslegungskennzahlen
für Schrittmotoren wieder. Im Gegensatz zur Auslegung eines Gleichstrommotors, bei dem
das maximale Motordrehmoment in Betrieb verwendet wird, ist bei Schrittmotoren das
maximale Haltemoment ausschlaggebend.
Haltemoment
In diesem Abschnitt soll das maximale Haltemoment des Schrittmotors des Praktikums
ermittelt werden. Ergebnis ist ein Graph, in dem das Motordrehmoment über dem Laststrom
des Motors aufgetragen wird.
Zur Ermittlung der Wertepaare stehen folgende Hilfsmittel zur Verfügung:
• Hebelarm
• div. Gewichte
• Strommessgerät
Der Schrittmotor muss mit einer Hebelstange bestückt werden. Diese wird mit einer
Madenschraube direkt auf die Motorwelle geklemmt. Stecken Sie anschließend das
Amperemeter an den entsprechenden Buchsen am Teststand an.
Nachdem die Versorgungsspannung des Motors eingeschaltet wurde, stellen Sie den
maximalen Motorstrom ein und belasten den Hebel mit Gewichten solange, bis das
maximale Haltemoment überschritten wurde. Der Motor verliert mindestens einen Schritt und
der Hebel fällt auf den Anschlag. Aus dem aufgelegten Gewicht und dem Hebelweg können
Sie das Drehmoment berechnen.
Da das Motordrehmoment stark von dem Betriebsstrom abhängt, werden weitere Werte
durch das Verringern des Motorstroms ermittelt und in ein Diagramm eingetragen.
Steuerprogramm für einen Schrittmotor
Zur Ansteuerung des Schrittmotors wird ein Treiberbaustein benutzt, der über TTL-Signale
angesteuert werden kann. Für die Steuerung des Motors im Praktikum müssen nicht alle
Funktionen des Treiberbausteins genutzt werden. Die benötigten Anschlüsse können aus
dem Anschlussplan entnommen werden.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MOT 21
Versuch Nr. 5: Motoren
Abbildung 13: Anschlüsse des Motortreiberbausteins
Pin
Funktion
Beschreibung
1
GND1
Masse
6
stepclk
Taktsignal für den Motor
7
CW/CCW
Richtungsvorgabe für den Motor. Belegung mit high oder unverbunden ergibt Drehung
im Uhrzeigersinn
11
Enable
Hauptschalter für die Bestromung des Motors
12
Vss
5-V-Logikspannung
13
GND2
Masse
14
D
Ausgang zum Motor
15
C
Ausgang zum Motor
16
B
Ausgang zum Motor
17
A
Ausgang zum Motor
18
Vs
Spannungsversorgung des Schrittmotors
Für die Steuerung des Motors müssen drei Signale gesetzt werden.
Nachdem der Eingang an Pin 11 auf high gesetzt wurde kann ein TTL-Taktsignal an Pin 6
die Anzahl und Frequenz der Schritte bestimmen. Die Rotationsrichtung wird über Pin 7
vorgegeben. Alle Steuersignale arbeiten mit 5 V Logikspannung.
MOT 22
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 5: Motoren
Start-Stopp-Fequenz
Der große Vorteil eines Schrittmotors besteht in der sensorlosen Positionserkennung. Dies
funktioniert aber nur unter der Annahme, dass der Motor der von der Steuerung
vorgegebenen Schrittfrequenz folgen kann. Sind die Frequenzsprünge in der Ansteuerung zu
hoch, führt dies zu Schrittverlusten. Diese bleiben durch den Open-Loop-Betrieb in der
Steuerung unbemerkt und heben die Vorteile der Lageerkennung des Schrittmotors auf. Bei
der Auslegung eines Antriebs für eine Bewegungsaufgabe muss das maximale Drehmoment
des Motors beachtet werden, um Schrittverluste zu vermeiden.
In diesem Versuch soll die maximale Startfrequenz mit unterschiedlichen Belastungszuständen ermittelt werden.
Montieren Sie den Zeiger mit Hilfe der Madenschraube auf die Ausgangswelle des Motors!
Bestromen Sie den Motor durch Einschalten des Motorhauptschalters! Justieren Sie die
Zeigerspitze auf einem Teilstrich der darunter liegenden Skala!
Steuern Sie den Schrittmotor so an, dass er immer eine gesamte Umdrehung ausführt!
Erhöhen Sie die Ansteuerfrequenz schrittweise so lange, bis der Motor keine volle
Umdrehung mehr erreicht! Deuten Sie diese Erscheinung!
Erhöhen Sie den Phasenstrom und wiederholen Sie die Messung! Welche Unterschiede sind
erkennbar?
Im Anschluss an die Versuche montieren Sie die Zusatzmasse auf dem zweiten Wellenende
des Schrittmotors! Wiederholen Sie obigen Versuch mit gleichen Phasenströmen! Was
können Sie feststellen?
Sie wollen eine Schrittfrequenz von 1,5 kHz erreichen. Wie können Sie dies mit dem
gegebenem Versuchsstand realisieren?
6 Literatur
•
Vorlesungsskriptum „Mikrotechnische Sensoren und Aktoren“, Lehrstuhl für
Mikrotechnik und Medizingerätetechnik, Prof. T. Lüth, 2006, TUM München
•
www.wikipedia.de
•
R.Haeslich: Positioniersystem mit Permanentmagnet Schrittmotoren;
Antriebstechnik (1988) 3 S.26-27
•
R. Weinke, G. Treffer: Moderne Positionierantriebe in der Bürogerätetechnik;
Feinwerk & Messtechnik 97 (1989)3 S.75-77
•
H.P.Kreuth: Schrittmotoren; Oldenburg, 1988
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MOT 23
Versuch Nr. 5: Motoren
•
G. Heine: Kleine PM-Schrittmotoren in der Datentechnik; Feinwerk &
Messtechnik 87 (1979) 4 S.146-151
•
H. Eissfeldt: Konzepte zur Erhöhung der Leistungsfähigkeit von
Schrittantrieben durch Ausnutzung der sensorischen Eigenschaften des
Motors; ETG-Fachbericht 27 (1989) S.17-26
•
H. Sax: Schrittmotorsteuerung mit monolithisch integrierten Bausteinen;
Elektronik (1980) 23 S.67-71
•
P. Dittrich: Näherungsweise Berechnung der zulässigen Steuerfrequenzen in
Start-Stop Betrieb von Schrittantrieben; Feingerätetechnik 30 (1981) 9 S. 401405
MOT 24
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 6: Mikrocontroller
Beschreibung zu Versuch Nr. 6:
Ansteuerung mit dem Mikrocontroller
Tobias Kraus, überarbeitet von Marcus Fischer
1. Einordnung
Beim Tintendrucker wird üblicherweise der Druckkopf mit konstanter Geschwindigkeit quer
über das zu bedruckende Papier bewegt, welches mit einer Walze in Längsrichtung
geschoben wird. Geht man von einer maximalen Tropfenerzeugungsfrequenz einer Düse
des Druckkopfes von 5 kHz aus, so wird maximal alle 200 µs ein Tropfen ausgestoßen. Wird
diese Zeit nicht exakt eingehalten, trifft der Tropfen nicht auf seine Sollposition. Dies macht
sich in einer Verschiebung einzelner Punkte des Druckes gegenüber den anderen
bemerkbar, was eine Minderung der Druckqualität darstellt. Aus diesem Grund hat die
Ansteuerung der Druckerachsen und der Düsen zeitlich aufeinander abgestimmt
stattzufinden. Dazu ist ein echtzeitfähiges System notwendig. Dies bedeutet, dass es auf ein
Ereignis innerhalb einer garantierten Zeit reagiert. Hier bedeutet dies beispielsweise, dass
der elektrische Impuls für den Tropfen spätestens 20 µs nach dem Erreichten der
Sollposition (Ereignis) gestartet werden muss.
Ein handelsüblicher PC ist für diese Aufgabe ungeeignet, da er für diese Aufgabe nicht
ausgelegt ist. Die üblichen Betriebssysteme (Windows, Linux) stellen keine Funktionen
bereit, die für die zeitkritische Prozesskontrolle notwendig sind. Ein schneller Hauptprozessor
ist kein Garant für die rechtzeitige Bearbeitung von Prozesssignalen. Hierzu muss die
Software auch entsprechend gestaltet sein.
Um Echtzeitfähigkeit zu erreichen wird in diesem Versuch eine Ansteuerung für den
Praktikumsdrucker mit einem Mikrocontroller programmiert1. Mikrocontroller sind vollständige
Rechner in einem (oder wenigen) Chip. Sie enthalten neben der arithmetischen-logischen
Einheit (ALU – arithmetic-logic unit), welche die eigentliche Datenverarbeitung durchführt,
auch die Adress-, Daten- und Steuerbusse sowie Programm- und Datenspeicher, Register
als Befehlsoperanden und zur Variablenspeicherung, Ein-/Ausgabeeinheiten (digitale Ein/Ausgabeports, Analog-Digital-Wandler, Schnittstellen zur digitalen Kommunikation (RS232,
I²C, USB, …)). Das Programm dieses Kleinstrechners wird in einem nichtflüchtigen Speicher
(z. B. EEPROM, Flash) abgelegt. Wird die Betriebsspannung an den Rechner angelegt,
beginnt die Programmabarbeitung an einer festgelegten Speicheradresse.
2. Theorie zu Mikrocontrollern
Mikrocontroller sind heute aus dem Alltag nicht mehr wegzudenken. Sie sind enthalten in
industrieller Steuerungstechnik (Fertigungsüberwachung, Robotersteuerungen, …), in
medizinischen Geräten (bildgebende medizinische Geräte, medizinischer Navigation, Geräte
zur Überwachung der Lebensfunktionen, …), Telekommunikation (Telefone, TK-Anlagen,
1
Weitere echtzeitfähige Alternativen sind beispielsweise anwendungsspezifische integrierte
Schaltkreise (Application Specific Integrated Circuit, ASIC), freiprogrammierbare Schaltkreise (Field
Programmable Gate Array, FPGA), digitale Signalprozessoren (Digital Signal Processor, DSP)
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MIK 1
Versuch Nr. 6: Mikrocontroller
Mobiltelefone, …), Unterhaltungselektronik (CD/DVD-Spieler, Fernseher, Spielekonsolen,
…), in der Fahrzeugtechnik (Einspritzregelung, elektronische Wegfahrsperre,
Navigationssystem, …) und noch vielen anderen Bereichen.
In diesem Praktikumsversuch soll ein besonderes Augenmerk auf die Steuerungstechnik von
elektromechanischen Systemen mit Hilfe von Mikrocontrollern geworfen werden.
2.1 Logischer Aufbau einer µC-Schaltung (Blockschaltbild)
Wird eine Steuerungsaufgabe von einem Mikrocontroller erfüllt, so sind immer mindestens
folgende Bestandteile enthalten:
CPU
E/A-Werk
Steuerwerk
Speicherwerk
Programmspeicher
Datenbus
Adressbus
Steuerbus
Rechenwerk
Umwelt
Digitale Eingänge
Taster, Schalter,
digitale
A äh
Digitale Ausgänge
Lampe, Schrittmotor,
Ventil, Relais, …
Analoge Eingänge
Potentiometer, Dehnmessstreifen,
Analoge Ausgänge
Digitale
Schnittstellen
Servomotor,
RS232, I2C, SPI, CANBus, USB, Ethernet,
Variablenspeicher
Bild 1: Hauptbestandteile einer µC-Schaltung
•
•
•
•
eine Zentraleinheit oder CPU bestehend aus Rechenwerk und Steuerwerk
ein Speicherwerk mit mindestens einem nichtflüchtigen Programmspeicher, meistens
zusätzlich auch ein flüchtiger Speicher
ein E/A-Werk, welches die Verbindung zwischen der CPU und der Umwelt herstellt
und die Umwelt in Form von elektrischen Sensoren und Aktoren im weitesten Sinne
(darunter fallen auch Bedien- und Anzeigeelemente für die Mensch-MaschineSchnittstelle wie Taster, Schalter, Potentiometer, Lampen, Alphanummerische
Anzeigen, …)
Das Rechenwerk wiederum setzt sich zusammen aus der Arithmetisch-Logischen-Einheit
(Arithmetic Logical Unit – ALU), welche die arithmetischen, logischen, binären und sonstigen
Funktionen berechnet, und aus einem Satz an Registern (Universal-, Adress-, Flag-), welche
zur Datenspeicherung dienen.
Das Speicherwerk enthält alle notwendigen Bestandteile zum Ansprechen von
Speicherzellen in den verschiedenen Speicherteilen. Es muss mindestens ein nichtflüchtiger2
2
Speicherinhalt bleibt auch bei abgeschalteter Versorgungsspannung erhalten
MIK 2
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 6: Mikrocontroller
Programmspeicher vorhanden sein. Schlagen Sie im Glossar die kurze Charakterisierung
der Speichertypen ROM, PROM, EPROM, EEPROM und Flash-EEPROM nach. Meistens ist
auch ein flüchtiger Speicher auf Basis von SRAM oder DRAM Technologie vorhanden, um
Daten während der Programmabarbeitung zwischenspeichern zu können. Ein zusätzlicher
EEPROM-Speicher kann zur dauerhaften Speicherung von Einstellungen (z. B. Betriebsparameter) vorhanden sein.
Das E/A-Werk stellt Ein- und Ausgabeschnittstellen zur Verbindung von Sensoren, Aktoren
und der Mensch-Maschine-Schnittstelle zur Verfügung. Hierbei unterscheidet man zwischen
digitalen und analogen Anschlüssen. Digitale Eingänge werden Beispielsweise durch Taster,
Schalter, (digitale) Annäherungssensoren, usw. bedient. Digitale Ausgänge können Lampen,
Schrittmotoren, Ventile, Relais und viele weiter Komponenten ansteuern. Analoge Signale
(Strom-, Spannung-) liefern zum Beispiel Potentiometer, Dehnmessstreifen oder
lichtabhängige Widerstände. Für die Drehzahlregelung von Gleichstrommotoren ist ein
analoger Ausgang notwendig. Digitale Schnittstellen dienen zur Kommunikation mit anderen
„intelligenten“ Geräten wie PCs, Sensoren, Aktoren oder Anzeigeeinheiten.
Diese Teile können in unterschiedlicher Technologie und Integrationsdichte vorhanden sein.
Dies reicht von einem hochintegrierten IC, der (ausgenommen der Umwelt, also Sensoren
und Aktoren) alle notwendigen Bestandteile enthält bis hin zu einem System, welches aus
Einzelteilen zusammengestellt wird: die CPU in Form eines Mikroprozessors, FlashEEPROM-Baustein(e) als nichtflüchtiger Programmspeicher, SRAM-ICs als flüchtiger
Datenspeicher, EEPROMs als nichtflüchtiger Datenspeicher und externen E/AErweiterungen, welche die Verbindung mit „intelligenten“3 Sensoren und Aktoren über ein
Bussystem herstellen. Ein Beispiel für solch ein System stellt ein handelsüblicher PC dar: die
CPU ist beispielsweise ein Intel Pentium 4 oder AMD Athlon Prozessor. Dieser wird über den
Frontside-Bus (Daten-/Adressbus) mit der Northbridge (E/A-Werk und Teile des
Speicherwerks) verbunden. Diese bindet die Speicher an den Prozessor an: den (flüchtigen)
Hauptspeicher in Form von DRAM-Technologie und das (nichtflüchtige) Flash-EEPROM das
den BIOS-Code enthält, der die Hardware initialisiert und das Betriebssystem lädt. Weitere
Beispiele für diese zusammengesetzten Mikrocontroller-Anwendungen stellt die
Fertigungsautomatisierung mittels SPS4 und Feldbussystemen (Profibus, …) oder die
vernetzten mikrocontrollerbasierten Steuergeräte in modernen PKWs dar.
Das Gegenteil dazu ist der vollständig integrierte Mikrocontroller mit wenigen zusätzlichen
Bauteilen: ein Mikrocontroller lässt eine Leuchtdiode mit einer Frequenz von 1 Hz blinken
wenn ein Taster gedrückt gehalten wird (siehe weiter unten als Beispielprojekt).
2.2 Die AVR-Mikrocontroller-Reihe von Atmel
An einem einfachen Beispiel sollen verschiedene Aspekte von Mikrocontrollern betrachtet
werden. Wird ein Taster gedrückt, soll eine Leuchtdiode mit einer Frequenz von 1 Hz
blinken. Dazu wird ein Atmel AVR ATtiny125 verwendet. Diese einfache Aufgabe muss dem
Mikrocontroller erst mit Hilfe des Maschinencodes beigebracht werden.
3
d. h. mit einem eigenen Mikrocontroller und Software ausgestattet, welcher eigenständig
Informationsverarbeitung durchführt
4
SPS: Speicherprogrammierbare Steuerung
5
dies ist eine kleinere Variante des im Versuch verwendeten Mikrocontrollers
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MIK 3
Versuch Nr. 6: Mikrocontroller
Ein Maschinenbefehl enthält die Informationen über die auszuführende Operation (z. B.
Addition, Vergleich, …) und deren Operanden. Bekanntlich will man so kein Programm
schreiben. Deshalb gibt es Compiler, welche Maschinencode erzeugen basierend auf einem
für den Menschen leichter verständlichen und vor allem übersichtlicheren Text, der
Programmiersprache. Wie für den PC gibt es auch für die AVR-Controller Compiler für
verschiedene Programmiersprachen, z. B. Pascal, C und natürlich Assembler. Dieses
einfache Beispiel ist in Assembler geschrieben, um einen kleinen Eindruck über die
Arbeitsweise eines Mikrocontrollers zu vermitteln. Assembler ist die dem Maschinencode
ähnlichste Programmiersprache. Tatsächlich wird jeder Assembler-Befehl eins zu eins in
Maschinencode überführt. Der Compiler hilft dem Programmierer, indem die Befehle ein
wenig für sich sprechen, oder können Sie sich etwas unter „0b0000 1111 0000 0001“6
vorstellen? Der Befehl „Add R16,R17“7 könnte zumindest etwas mit Addition zu tun haben.
Die Verwendung von selbstsprechenden Variablennamen im Gegensatz zu
Speicheradressen oder Registernamen wie R16 erhöht die Lesbarkeit des
Programmquelltextes. Außerdem nimmt er die Berechnung von Speicheradressen ab, so
dass sie nicht mit jedem eingefügten Befehl neu berechnet werden müssen.
Im Anschluss ist das Assembler-Programm für obige Aufgabe zweimal abgedruckt. Zuerst
ausführlich kommentiert (eingeleitet durch ein „;“) zur Erklärung was die einzelnen Befehle
bewirken und im Anschluss ohne Kommentare um eine Übersicht über die relevanten Zeilen
zu haben und um das Programm nachvollziehen zu können.
;
;
;
;
;
Controller: ATtiny12
PB3: Taster
PB4: LED
Die Leuchtdiode blinkt mit einer Frequenz von 1Hz
wenn der Taster PB3 gedrueckt ist.
; Definitionsdatei fuer ATtiny12 einbinden
.INCLUDE "tn12def.inc"
; sprechende Variablennamen verwenden
.DEF temp =
R16 ; Register 16
.DEF temp2 =
R17
.DEF zaehler =
R18
.EQU led =
.EQU taster =
PB4
PB3
; Der erste Befehl der nach dem Anlegen der Betriebsspannung bzw. nach einem
; Reset ausgefuehrt wird steht in der Speicherzelle mit der Adresse 0x00:
.ORG 0x00
; rjmp (relative jump): bedingungsloser Sprung zu einer bestimmten
;
Programmadresse, hier: main
rjmp main
; zum Hauptprogramm springen
; wird ein Interrupt ausgeloest, veranlasst der Interupt Controller den
; Controller, an einen bestimmten Speicherbereich zu springen und den an dieser
; stelle stehenden Befehl auszufuehren.
.ORG INT0addr
;External Interrupt0 Vector Address
; reti (return from interupt): bildet den Abschluss einer ISR (siehe Glossar)
6
Die Vorsilbe „0b“ zeigt an, dass der auf sie folgende Wert eine Binärdarstellung ist. Eine weitere
Vorsilbe stellt „0x“ dar, welcher eine Zahl in Hexadezimaldarstellung folgt.
7
„0b0000 1111 0000 0001“ ist tatsächlich der Maschinenbefehl für „Add R16,R17“!
MIK 4
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 6: Mikrocontroller
reti
.ORG PCINTaddr
reti
.ORG OVF0addr
rjmp OVF0isr
.ORG ERDYaddr
reti
.ORG ACIaddr
reti
;Pin change Interrupt Vector Address
;Overflow0 Interrupt Vector Address
;EEPROM Interrupt Vector Address
;Analog Comparator Interrupt Vector Address
; "<name>:" veranlasst den Compiler, die aktuelle Speicheradresse in der
; Konstante <name> zu speichern (sog. Label).
main:
; Der ATtiny 12 hat 5 frei verwendbare digitale Ein-/Ausgänge, die alle im
; Port B enthalten sind.
; Die logischen Bezeichnungen fuer die einzelnen Pins (Bits oder
; Ein-/Ausgaenge) haben folgende Namen: PB0...PB4
; Dabei korrespondiert PB0 mit dem Bit 0 in den entsprechenden Registern
; und PB4 mit Bit 4 (Nummerierung der Bits erfolgt aufsteigend von
; rechts nach links mit den Werten 0 bis 7).
; "P" steht fuer Port und "B" für den Port B. In groesseren Mikrocontrollern
; wie den ATmega32 gibt es neben dem Port B auch A, C und D.
; Dementsprechend auch PA0..PA7, PB0..PB7, PC0..PC7 und PD0..PD7
; Die Namen gestalten den Assembler-Code lesbarer.
;
; Register DDRB mit 0b00000000 initialisieren
; DDRB: Data Direction Register port B
; Das Data Direction Register legt fest, welche Pins als Ausgang
; (entsprechendes Bit = 1) und welche als Eingang (entsprechendes
; Bit = 0) dienen.
;
; zunaechst alle Pins als Eingang definieren
;ldi (load immediate): Register mit einem festen Wert laden
;out (Out Port): Registerinhalt in einen Port laden
ldi temp, 0
; Register temp mit 0 laden
out DDRB, temp ; Registerinhalt von temp dem DDRB zuweisen
; Die Funktion der Bitwerte im Port-Register ist abhaengig, ob der
; entsprechende Pin als Ein- oder Ausgang definiert ist.
; Ist er als Ausgang definiert, gibt das PORT-Register den Zustand am
; Beinchen des ICs an: 0 = 0V; 1 = 5V
; Ist der Pin als Eingang definiert, gibt er an ob der im Mikrocontroller
; eingebaute Pull-Up-Widerstand aktiviert ist oder nicht
;
; alle Pull-Up-Widerstaende einschalten (siehe Glossar)
ldi temp, 0b11111
out PORTB, temp
; PB3, an den der Taster angschlossen ist, ist bereits richtig konfiguriert.
; Jetzt muss nur noch PB4 als Ausgang geschalten werden.
;cbi (clear bit in I/O register): ein einzelnes Bit in einem E/A-Register löschen
cbi PORTB, led
; und jetzt erst als Ausgang schalten.
;sbi (set bit in I/O register): ein einzelnes Bit in einem E/A-Register setzen
sbi DDRB, led
;
;
;
;
;
Starten/konfigurieren des Timer/Counter 0 (kurz: TC0)
Mit jedem Taktsignal erhoeht der TC0 den Wert im
TCNT0 (Timer/Counter0)-Register. Tritt ein Ueberlauf ein (siehe Glossar)
wird ein Timer/Counter 0 Overflow Interrupt ausgeloest
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MIK 5
Versuch Nr. 6: Mikrocontroller
; Der Timer/Counter bezieht seinen Zaehltakt von einem sog. Prescaler.
; Dieser bezieht seine Taktfrequenz vom Mikrocontroller und kann sie
; durch feste Werte teilen (1, 8, 64, 256, 1024).
; In diesem Fall wird ein Divisor von 64 gewaehlt (siehe Datenblatt S. 34)
ldi temp, 0b011 ; Clk/64
; TCCR0: Timer/Counter 0 control Register; konfiguriert/startet den TC0
out TCCR0, temp
;
;
;
;
;
;
; TC0 Overflow Interrupt aktivieren
; TIMSK: Timer/counter Interrupt Mask register
; TOIE0: Timer/counter 0 Overflow Interrupt Enable
<< : Shift Left Operator: der Wert, der links davon steht (1) wird um so viele
Bit-Stellen nach links verschoben wie der rechte Operator angibt.
ldi temp, (1<<TOIE0)
out TIMSK, temp
; Interrupts einschalten:
sei (Set Interrupt Flag): setzt das "Global Interrupt Enable" Flag im
Statusregister SREG. Dadurch werden Interrupts
erlaubt. Ist es geloescht, werden keine Interrupts
ausgefuehrt.
sei
; noch Variablen initialisieren
ldi zaehler, 0
; Endlosschleife, eigentliche Aufgabe wird in der ISR von TC0 Overflow Interrupt
; durchgefuhrt. Zum Stromsparen kann hier ein passender Sleep-Modus eingestellt
; werden.
loop:
rjmp loop
OVF0isr:
; ISR des Timer/Counter 0 Overflow interrupts
; Diese ISR wird mit ca. 73 Hz aufgerufen: 1.2MHz/64/256= 73Hz
; 1.2MHz: Systemtakt
; 64:
TC0 Prescaler-Teiler
; 256:
Die Zaehlvariable TCNT0 wird solange hochgezaehlt bis ein
;
Ueberlauf stattfindet. Dann wird der Interrupt ausgeloest
; Um auf die Blinkfrequenz von 1 Hz zu kommen, muss der Takt noch durch
; 37 geteilt werden. Dies wird von Hand durchgefuehrt
;inc (INCrement): Register um 1 erhoehen
inc zaehler
;cpi (ComPare Immediate): Ein Register mit einem festen Wert vergleichen
cpi zaehler, 37
;brlo (BRanch if LOwer): Befehl verzweigt zu einer Speicheradresse wenn beim
;
vorhergehenden Vergleich der linke Operand kleiner
;
war als der rechte.
brlo ende_isr
ldi zaehler, 0
; in (In Port): Gegenstueck von out, Laedt Inhalt des E/A-Port in das Register
; PINB: enthaelt die Eingangswerte von PortB
in temp, PINB
ldi temp2, (1<<taster)
; nur das zu betrachtende Bit soll auf 1 gesetzt sein koennen, deshalb werden
; die uebrigen ueber ein binaeres UND ausgeblendet
;and (binaeres AND): and R1,R2: R1 = R1 AND R2
and temp, temp2
cpi temp, 0
; an das Ende der ISR springen wenn der Taster nicht gedrueckt ist
; Taster zieht Eingang auf GND -> Taster gedrueckt <-> PINB3 = 0
MIK 6
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 6: Mikrocontroller
;brne (BRanch if Not Equal): Verzweigen wenn beim vorhergehenden Vergleich der
;
linke und rechte Operaator nicht gleich gross waren
brne ende_isr
; Taster gedrueckt -> LED umschalten
in temp, PORTB
ldi temp2, (1<<led)
; LED umschalten mittels XOR
; eor (Exclusives OR): eor R1,R2: R1 = R1 XOR R2
eor temp, temp2
out PORTB, temp
ende_isr:
reti
.INCLUDE "tn12def.inc"
out TCCR0, temp
.DEF temp =
.DEF temp2 =
.DEF zaehler =
ldi temp, (1<<TOIE0)
out TIMSK, temp
sei
R16
R17
R18
.EQU led =
PB4
.EQU taster =
PB3
.ORG 0x00
rjmp main
.ORG INT0addr
reti
.ORG PCINTaddr
reti
.ORG OVF0addr
rjmp OVF0isr
.ORG ERDYaddr
reti
.ORG ACIaddr
reti
main:
ldi temp, 0
out DDRB, temp
ldi temp, 0b11111
out PORTB, temp
cbi PORTB, led
sbi DDRB, led
ldi temp, 0b011
ldi zaehler, 0
loop:
rjmp loop
OVF0isr:
inc zaehler
cpi zaehler, 37
brlo ende_isr
ldi zaehler, 0
in temp, PINB
ldi temp2, (1<<taster)
and temp, temp2
cpi temp, 0
brne ende_isr
in temp, PORTB
ldi temp2, (1<<led)
eor temp, temp2
out PORTB, temp
ende_isr:
reti
Im Unterschied zum PC, bei dem der eben erstellte Maschinencode direkt ausgeführt
werden kann, muss er dem Mikrocontroller noch zugänglich gemacht werden. Besteht der
Programmspeicher aus diskreten (Flash- oder (E)EP-)ROM Bausteinen, so kann er mit
einem für den jeweiligen Speichertyp geeigneten Programmieradapter direkt in den IC
geschrieben werden. Ist der Speicher, wie in diesem Fall, im Mikrocontroller selbst enthalten,
benötigt man ein Programmiergerät für den Mikrocontroller. Die AVR-Serie ist für die „InSystem“-Programmierung geeignet. Dabei kann der Mikrocontroller in der elektrischen
Schaltung verbleiben und das Programm kann durch Anstecken des Programmieradapters
übertragen werden.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MIK 7
Versuch Nr. 6: Mikrocontroller
In diesem Beispiel soll eine Leuchtdiode mit einer Frequenz von 1 Hz blinken, d.h. sich im
Abstand von 0,5 s ein- und ausschalten. Dazu muss der Mikrocontroller die vergangene Zeit
seit dem letzten Umschalten kennen. Dies erfolgt mittels der Zählung von elektrischen
Impulsen mit fester Frequenz durch den eingebauten Timer. Das Taktsignal wird in diesem
Beispiel (und auch im Praktikumsversuch) von dem eingebauten RC Schwingkreis erzeugt.
Dies hat den Vorteil, dass diskrete Bauteile eingespart werden, aber den Nachteil, dass die
Frequenz von der Temperatur und der Versorgungsspannung abhängt. Für zeitunkritische
Anwendungen stellt dies kein Problem dar. Es gibt weitere Frequenzgeneratoren welche die
nominelle Frequenz zu höheren Bauteilkosten besser einhalten: Keramik-Resonatoren,
Quarze und Oszillatoren. Zu diesem Thema sei hier nur soviel gesagt, dass die (primäre)
Taktfrequenz bei allen drei auf einer mechanischen Resonanz beruht. Die Oszillatoren
haben zusätzliche Teile, welche die Frequenzstabilität im Vergleich zu den Quarzen erhöht.
Die genaue Verwendung ist in einschlägiger Literatur zu finden. Diese Impulse sind es auch,
die den Takt (clkCPU) für die Befehlsabarbeitung vorgeben.
Im ersten Takt sendet das Steuerwerk die Adresse des nächsten auszuführenden Befehls an
das Speicherwerk und dieses antwortet mit dem Befehlswort. Das Steuerwerk stellt dieses
dann der ALU bereit, die es dann im darauf folgenden Takt verarbeitet und das Ergebnis in
einem Register abgelegt.
Ein Maschinenbefehl ist aus zwei Teilen aufgebaut:
• Operationscode oder Opcode enthält den eigentlichen Befehl und impliziert
Informationen über die
• Operanden die zu verarbeitenden Daten bzw. deren Speicheradresse oder das Ziel
eines Sprungbefehls.
Bild 2: Arbeitsdiagramm einer CPU
Der Befehlssatz eines Prozessors kann in verschiedene Gruppen eingeteilt werden:
• Arithmetische Befehle
führen mathematische Berechnungen durch
• Logische und Bitmanipulationen
logische Verknüpfung von Daten, setzen, löschen, invertieren, abfragen einzelner
Bits sowie deren Verschiebung und Rotation von Bitstellen
• Transportbefehle Datenübertragung zwischen Registern, Speicher und E/ASchnittstellen
• Programmsteuerbefehle ändern die lineare Abarbeitung der Programmverarbeitung,
z. B. Sprungbefehle, Aufruf und Beendigung von Unterprogrammen
MIK 8
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 6: Mikrocontroller
•
Prozessorsteuerbefehle
ändern die Arbeitsweise des Prozessors, z. B. in Stromsparmodus wechseln oder
gezielte Veränderung von Flags wie des Interrupt-Flags: ein- bzw. ausschalten von
Interrupts
Neben den „normalen“ Speichern – Flash-EEPROM und SRAM – haben die AVR-Controller
noch einige Bits welche nicht für die Maschinenbefehle erreichbar sind – die FUSE-Bits.
Diese können nur von dem Programmieradapter geändert werden und dienen zur
Konfiguration des Mikrocontrollers. Beispielsweise wird die Taktfrequenz-Quelle
(Schwingquarz, RC-Schwingkreis, …) und deren Frequenzbereich oder die
Ansprechspannung des eingebauten Brown-Out-Detektors8
2.3 Auswahl des „richtigen“ Mikrocontrollers
Mikrocontroller gibt es in einer riesigen Variantenvielfalt. Aus dieser muss man den für die
Anwendung geeignetsten finden. Jedes Projekt hat eine Vielzahl von Randbedingungen
welche die Auswahl einschränken. Darunter fallen:
• Datenbus-Breite: 4, 8, 16, 32, … Bit.
Die Datenbus-Breite beschreibt, wie viele Leitungen der Datenbus aufweist, d. h. wie
viele Datenbits gleichzeitig übertragen werden können. Dies ist eine charakteristische
Größe für Mikrocontroller. Sie gibt die Genauigkeit an, mit der der Controller rechnen
kann. Bei acht Bit kann jede Variable 28=256 unterschiedliche Werte annehmen (wird
eine größere Genauigkeit benötigt, muss dies mit mehreren einzelnen AssemblerBefehlen erreicht werden).
• Adressraum: z. B. 2 kByte … 8 Mbyte.
Der Adressraum gibt an, wie viel „Speicher“ der Mikrocontroller ansprechen kann.
Hierunter fällt neben dem Programm- und Datenspeicher auch die Peripherie. Diese
Größe ist abhängig von der Adress- und der Datenbusbreite. Der erwartete
Programm- und Datenumfang stellt die Vorgabe dar.
• Anbindung des Speichers
Ist der Speicher im Mikrocontroller integriert, kann er extern erweitert werden oder ist
er vollständig extern. Welche Speichertypen werden verwendet: Nur-Lese-Speicher:
ROM/PROM/EPROM/EEPROM/Flash-EEPROM Schreib-Lese-Speicher:
SRAM/DRAM
• Organisationsform: Harvard, von Neumann, …
von Neumann: wird in PCs verwendet. Aufgebaut aus Rechenwerk, Steuerwerk, E/AWerk und Speicherwerk. Der Programm- und Datenspeicher sind in einer Einheit
zusammengefasst – Programm und Daten können sich vermischen. Harvard: hier ist
der Programm- und der Datenspeicher voneinander getrennt und festen
Speicherbereichen zugeordnet
• Rechenleistung
u. a. abhängig von der möglichen Taktfrequenz (100 kHz … hunderte MHz),
8
Brown-out bezeichnet das langsame Sinken der Versorgungsspannung. Der Brown-Out-Detektor
erkennt dies und führt einen Reset des Mikrocontrollers durch, wenn die Versorgungsspannung unter
einen festgesetzten Wert sinkt und verhindert so Fehlberechnungen
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MIK 9
Versuch Nr. 6: Mikrocontroller
•
•
•
•
•
Befehlsabarbeitungsgeschwindigkeit (wie viele Taktzyklen benötigt ein
Prozessorbefehl bis er vollständig abgearbeitet ist), Parallelisierung von
Befehlsabarbeitung (holen des nächsten Befehls während der aktuelle Befehl
abgearbeitet wird)
• Komplexität der Prozessorbefehle
RISC: Reduced Instruction Set Computing Der Befehlssatz des Mikrocontrollers
besteht aus einfachen, schnell auszuführenden Befehle (meist ein oder wenige
Prozessortakte, z. B. Addition, Subtraktion, Vergleiche, …). Aufwendige
Berechnungen müssen durch mehrere einzelne Befehle durchgeführt werden.
CISC: Complex Instruction Set ComputingNeben den elementaren Befehlen wie bei
den RISC-Prozessoren verfügen diese über zusätzliche Befehle welche aufwendige
Aufgaben durchführen. Der Maschinencode wird kürzer, benötigt aber mehr oder
größere Befehlsworte. Mit dieser Komplexität steigt auch der Preis des
Mikrocontrollers. Oft benötigen auch die elementaren Maschinenbefehle mehr
Taktzyklen zur Abarbeitung als bei RISC-Prozessoren.
• Welche Zusatzeinheiten sind auf dem Mikrocontroller vorhanden:
• digitale Ein-/Ausgabeschnittstellen: Taster gedrückt/Lampe leuchtet
• Timer: Zähler zur Zeitablaufsteuerung
• serielle Datenschnittstellen (U(S)ART, I2C, CAN-Bus, …)
• Analog-Digital-Wandler
• Pulsweitenmodulatoren (einfacher Digital-Analog-Wandler)
• JTAG – Schnittstelle zum Auslesen von Speicher- und Registerinhalten u. a. zu
Debugging-Zwecken
• Stromsparmodi – Verminderung der Stromaufnahme bei niedriger
Rechenauslastung
• ISP-fähig: kann der Controller im Zielsystem programmiert werden
Preis
Stückzahlen
Verfügbarkeit
Hier ist nicht nur die Verfügbarkeit in den geforderten Stückzahlen wichtig, sondern auch
die Verfügbarkeit während der gesamten Produktionsdauer des Endproduktes, so dass
keine Anpassungsentwicklung stattfinden muss.
Verfügbare Entwicklungswerkzeuge:
• Compiler (welche Sprachen: Assembler, C, Pascal, BASIC, …)
• Emulatoren (in Software auf dem PC), Simulatoren (der Mikrocontroller wird im
Zielsystem emuliert, jedoch mit vollem Zugriff auf die Speicherstellen)
• Debugging
Kenntnisse/Erfahrungen/Vorlieben des Entwicklers sowie vorhandene Entwicklungswerkzeuge
Die Einarbeitung in eine neue Mikrocontrollerfamilie ist mit erheblichen Kosten und
Zeitaufwand verbunden. Wenn möglich sollen Erfahrungen aus vorhergehenden
Projekten genutzt werden. Auch Entwicklungswerkzeuge schlagen nicht unerheblich zu
Buche. Bei Umstieg auf eine neue Controllerfamilie ist dann neben neuer Software auch
teure Hardware (Simulatoren, Programmiergeräte, etc.) anzuschaffen.
MIK 10
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 6: Mikrocontroller
Beispiele für Mikrocontrollerfamilien (Hersteller in Klammern):
8 Bit:
• AVR (Atmel)
• COP8 (National Semiconductors)
• C500 (Infineon)
• 8051 (Intel, u.a.)
• PIC (Microchip)
• …
16 Bit:
• H8/300 (Hitachi)
• 68HC12/16 (Motorola)
• C166 (Infineon)
• ST9/ST10 (SGS Thomson)
• µPD78k (NEC)
• MCS96 (Intel)
Für den Praktikumsversuch wird der ATmega32 von Atmel verwendet. Atmel stellt kostenlos
die Entwicklungs-, Simulations- und Programmierumgebung „AVRStudio“ zur Programmierung der Mikrocontroller der ATmega und ATtiny-Reihe in Assembler zur Verfügung. Diese
kann mit der kostenlosen Distribution WinAVR des AVR-GCC Crosscompilers um die
Programmiersprache C ergänzt werden.
3 Ausprägungen im Versuch
3.1 Der Atmel ATmega32
Der ATmega32 von Atmel ist ein Acht-Bit-RISC-Mikrocontroller mit einem 32 kByte großen
Programmspeicher9 aus Flash-EEPROM-Technologie ausgestattet, programmierbar über
einen In-System-Programmieradapter. Weiterhin enthält er 2 kByte SRAM für
Programmvariablen und 1 kByte EEPROM10 zur dauerhaften Datenspeicherung. 32
Mehrzweckregister in acht Bit Breite sind zur freien Verwendung vorhanden.
Durch den eingebauten 1-MHz-RC-Schwingkreis kann man in nicht zeitkritischen
Anwendungsfällen auf einen externen Oszillator verzichten.
Der eingebaute Interrupt-Controller kann auf bis zu 21 verschiedene äußere (z. B. Taster
gedrückt) oder innere (das Datum wurde vollständig über die RS232-Schnittstelle
ausgegeben) reagieren (siehe auch Glossar und weiter unten).
Wie bei der ATmega-Reihe üblich, kann der Programmspeicher auch geschützt werden, so
dass ein Auslesen verhindert wird (zum Schutz des geistigen Eigentums).
Die JTAG-Schnittstelle ermöglicht mit einer entsprechenden Hard- und Software das
Auslesen von Speicherinhalten während der Programmausführung und erleichtert so das
Auffinden von Programmfehlern.
9
Entspricht ca. 16000 Maschinenbefehlen
Wird in diesem Versuch nicht verwendet
10
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MIK 11
Versuch Nr. 6: Mikrocontroller
Vier digitale E/A-Schnittstellen („Ports“) mit jeweils 8 Bit Breite ermöglichen den Anschluss
von Tastern, Schaltern, Leuchtdioden und andere digitale Ein-/Ausgänge. Jedes einzelne Bit
einer Schnittstelle kann unabhängig als Ein- oder Ausgang betrieben werden. Als Eingang
kann ein Pull-Up-Widerstand (siehe Glossar) hinzugeschalten werden, so dass dieser nicht
in der elektrischen Schaltung vorgesehen werden muss. Der Ausgang kann direkt bis zu
20 mA sowohl als Senke als auch als Quelle treiben. Damit können Leuchtdioden ohne
Treiberbaustein (z. B. Transistor) angeschlossen werden.
Jeder dieser 32 digitalen Ein-/Ausgänge kann alternativ als eine oder mehrere der
Zusatzfunktionen des Mikrocontrollers geschalten werden (in diesem Skript wird nur auf die
für den Versuch notwendigen Funktionen genauer eingegangen, die vollständige Belegung
ist im Datenblatt des Mikrocontrollers zu finden).
Mehrere Zeitzähler (Timer/Counter) in 8 und 16 Bit Auflösung ermöglichen Zeitmessung von
Vorgängen, zum Beispiel zur Frequenzmessung von Eingangssignalen oder auch das
Aufrufen einer Funktion in festen Zeitabständen.
Vier Pulsweitenmodulatoren (ergänzt mit einem elektrischen Tiefpassfilter) ermöglichen die
Erzeugung eines Analogsignals.
Unterstützung von drei verschiedenen seriellen Schnittstellen zur Kommunikation mit
anderen Komponenten: USART, SPI, TWI. Da sie in diesem Praktikum nicht benötigt
werden, werden sie hier nicht weiter ausgeführt. Eine kurze Charakterisierung der
Schnittstellen ist im Glossar zu finden.
Ein Analog-Komparator ermöglicht das Feststellen, ob eine analoge Spannung unterhalb
oder oberhalb einer Referenzspannung liegt.
3.2 Programmierumgebung AVR Studio und AVR GCC (WinAVR)
Als Programmierumgebung kommt das AVR Studio zum Einsatz, welches Atmel im Internet
kostenlos zur Verfügung stellt. Dies ist eine Entwicklungsumgebung zur Erstellung,
Fehlersuche und zum Hinaufladen von Programmen auf AVR-Mikrocontroller. Die
Programmverwaltung erfolgt projektbezogen, d. h. es wird zuerst ein neues Projekt erstellt,
Quelldateien erzeugt oder hinzugefügt, der Mikrocontroller entsprechend konfiguriert usw.
Die gesamten Einstellungen werden in einer Projektdatei gespeichert, so dass sich
unabhängige Projekte nicht untereinander beeinflussen. AVR Studio enthält einen Quellcode
Editor, eine Simulationsumgebung des projektierten Mikrocontrollers zum Auffinden von
Softwarefehlern, Programmiersoftware zum hinaufladen des Maschinencodes auf den
Controller und eine Umgebung um den Programmablauf auf dem Controller mittels eines
JTAG-Adapters verfolgen zu können (wird hier nicht verwendet). Von sich aus können mit
dem AVR Studio nur Assembler-Programme compiliert werden. Ist zum Installationszeitpunkt
von AVR Studio bereits die WinAVR-Distribution installiert, unterstützt das AVR Studio auch
das Erstellen von und die Fehlersuche in Maschinencode basierend auf C/C++-Quellcode.
Der Mikrocontroller wird in C programmiert.
MIK 12
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 6: Mikrocontroller
Als Einstieg in die AVR-Studio-Programmierumgebung mit C-Unterstützung dient das
Assembler-Beispiel aus dem vorhergehenden Kapitel11. Nach dem Start des AVR Studios
erscheint ein Dialogfeld Anlegen bzw. Öffnen von Projekten. Mit der Schaltfläche „New
Project“ wird ein neues Projekt angelegt:
Bild 3: Ein neues Projekt anlegen
Über die „Next >>“-Schaltfläche kommt man zur Auswahl des Projekttyps. Es stehen die
Projekttypen „Atmel AVR Assembler“ und „AVR GCC“ zur Verfügung. Letzteres erzeugt ein
C/C++-Projekt. Weiterhin muss ein Projektname angegeben werden.
Bild 4: Projekttyp auswählen
Mit „Next >>“ weiter zur Mikrocontrollerauswahl. „Debug platform“ muss auf der
Standardeinstellung „AVR Simulator“ verbleiben, unter „Device“ den Mikrocontroller
angeben, für den das Programm entwickelt wird, hier „ATtiny2313“. Diese Auswahl hat
Auswirkungen sowohl auf den Compiler der den exakten Controllertyp kennen muss damit er
nur solche Maschinenbefehle verwendet die das Zielsystem auch kennt12, sowie auch auf die
Debugger-Umgebung, die die Maschinenbefehle controllerspezifisch interpretieren muss.
Bild 5: Prozessortyp wählen
11
Im Gegensatz zum Assembler-Beispiel wird hier der ATtiny2313 verwendet. Die meisten ATtinys
haben kein SRAM und werden deshalb für die Programmierung in C nicht unterstützt.
12
Nicht alle AVR-Mikrocontroller haben den vollen Maschinenbefehlssatz implementiert
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MIK 13
Versuch Nr. 6: Mikrocontroller
Nach der Eingabebestätigung mit „Next >>“ wird das Projekt erstellt und es erscheint die
Entwicklungsumgebung. Diese ist aus einer Reihe von Ansichten aufgebaut. Im
Editorfenster c wird der Quellcode erstellt. Syntaxhervorhebung erhöht die
Übersichtlichkeit. Im Ausgabefenster d werden verschiedene Informationen dargestellt:
Build:
Ausgaben des Compilers (bzw. Assemblers)
Messages:
Ausgaben verschiedener Komponenten von AVR Studio
Find in Files:
Ergebnis der Suchfunktion
Breakpoints:
Liste von Breakpunkten
Die Arbeitsbereich-Reiter e enthalten Informationen zum leichteren Auffinden von
Programmfehlern:
Projektansicht:
Liste der Dateien, welche im Projekt verwendet werden, bei AVR GCC
aufgeteilt nach „Source Files“ (alle Dateien mit Quellcode), „Header Files“
(Header-Dateien, welche die Köpfe der in den Quelldateien definierten
Funktionen, Makros („#define“), globale Variablen usw. enthalten
können. Detaillierte Informationen zu Header-Dateien sind in der
einschlägigen Literatur zu finden.), „External Dependencies“ (Dateien,
welche in der WinAVR-Distribution oder anderen Quellen enthalten sind
und dem Projekt eingebunden sind; können wichtige Informationsquelle
sein!), sowie „Other Files“ (z. B. Textdateien mit Informationen zum
Programm)
I/O View:
Zeigt während der Simulation (Debugging) die aktuellen Werte an
Register: Werte der Universalregister
Processor: Prozessorregister wie Befehls- und Stackzeiger
I/O Register: Werte der E/A-Einheiten
Info:
Allgemeine
Informationen
zum
ausgewählten
Prozessor
wie
Interrupttabelle und Konfigurationsregister
Wird das Programm simuliert, stehen noch weitere Fenster zur Verfügung: im „Watch“Fenster f werden die Variablenwerte angezeigt, das „Memory“-Fenster g enthält die
Speicherinhalte sämtlicher verfügbarer Speicherbereiche (Programm-, Register-, SRAM-,
EEPROM-) und das „Register“-Fenster h enthält noch einmal die Werte der
Universalregister, wie auch in e. Zuletzt gibt es noch ein Fenster zum Hinaufladen i des
Maschinencodes auf den Mikrocontroller.
MIK 14
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 6: Mikrocontroller
e
e
c
f
g
g
h
f
i
h
d
Bild 6: Die Entwicklungsumgebung des AVR Studio
3.3 Grundlagen der Mikrocontroller-Programmierung in C
Werden in diesem Versuch auch grundlegende Kenntnisse in der C-Programmierung aus
dem Grundstudium als bekannt vorausgesetzt, wird hier kurz auf die Programmiersprache
und vor allem auf die Besonderheiten der hardwarenahen Programmierung von
Mikrocontrollern eingegangen. Im Anhang befindet sich eine kurze Übersicht über wichtige
C- und AVR-libc13-Befehle. Das Beispielprogramm ist in der nachfolgenden Abbildung zu
finden:
13
avr-libc ist eine Bibliothek mit Funktionen für AVR-Mikrocontroller, welche die ANSI-C-Befehle
ergänzt. Darunter fallen z. B. die Definition von Variablen (uint8_t als 8-Bit-vorzeichenlose-Ganzzahl)
über mikrocontrollerspezifische Funktionen (Stromsparmodi, Timer-Funktionen, zeitdauerbasierte
Wartefunktionen, Verwendung des TWI, EEPROM-Zugriff, …) bis hin zu mathematische Funktionen
(sin, cos, …)
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MIK 15
Versuch Nr. 6: Mikrocontroller
Bild 7: Screenshot mit Quellcode
Ein C-Programm ist nach folgendem Schema aufgebaut:
Direktiven für den Präprozessor
Globale Deklarationen
Typ funktion_1( . . . )
. . .
Typ funktion_n( . . . )
int main( . . . )
{
lokale Deklarationen
Anweisungsfolge
}
Typ funktion_1( . . . )
{
lokale Deklarationen
Anweisungsfolge
}
. . .
Typ funktion_n( . . . )
{
lokale Deklarationen
Anweisungsfolge
}
Nach dem Erzeugen des Quelltextes erfolgt dessen Umwandlung in Maschinensprache in
zwei Schritten:
MIK 16
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 6: Mikrocontroller
1. Übersetzen:
Dieses ist wiederum in vier Einzelschritte aufgeteilt:
• Verarbeitung durch den Präprozessor
in diesem Vorverarbeitungsschritt werden u. a. externe Dateien zu den
Quelldateien dazugebunden (#include) oder Makros (#define) ausgewertet,
d. h. wo immer das Makro vorkommt durch dessen Definition im #define ersetzt,
u.v.a.
• Compilieren
Umwandlung des vorverarbeiteten Quelltexts in Assembler
• Assemblieren
Umwandlung des entstandenen Assembler-Quelltextes in Maschinensprache
2. Binden (Linken)
Aus jeder Quelltextdatei (*.c) entsteht ein eigenes Maschinenbefehlsfragment. Diese
Einzelteile werden in diesem Schritt zu einem großen Ganzen zusammengefügt.
Außerdem werden Bibliotheksfunktionen, die bereits in Maschinencode vorliegen,
auch in das Gesamtprogramm eingebunden.
Die Programmierung in C und auch einige wenige Besonderheiten der
Mikrocontrollerprogrammierung sollen an dem kommentierten Beispiel dargestellt werden.
Dieses erfüllt die gleiche Aufgabe wie das Assembler-Beispiel, ist jedoch für den ATtiny2313
implementiert, da der ATtiny12 nicht mit C programmiert werden kann.
// Eine Leuchtdiode soll mit 1Hz blinken wenn ein Taster gedrueckt wird
// (siehe auch Assembler-Beispiel)
// stellt verschiedene Integer-Variablentypen, u.a. uint8_t zur Verfügung
#include <inttypes.h>
// definiert grundlegende Makros fuer die Ein-/Ausgabe, u.a. PORTA, DDRB, etc.
#include <avr/io.h>
// stellt die Interrupt-Behandlung zur Verfuegung (SIGNAL())
#include <avr/interrupt.h>
// wo ist der Taster und die LED angeschlossen
#define Taster PB3
#define LED
PB4
// Makros zum Setzen, Löschen, Umschalten eines Bits in einem Port
// sind auch im Praktikumsversuch so vorhanden
// _BV(n) berechnet 2^n; faktisch setzt es das n-te Bit auf 1
// |: binaeres ODER
// &: binaeres UND
// ^: binaeres EXKLUSIVES ODER (1^0=1; 0^1=1; 0^0=0; 1^1=0)
#define set_bit(port, bit)
( port |= _BV(bit) )
#define clear_bit(port, bit) ( port &= (unsigned char)~_BV(bit) )
#define toggle_bit(port, bit) ( port ^= _BV(bit) )
//
//
//
//
//
Definition der globalen Variable zaehler (nicht innerhalb einer Funktin)
kann in main() und SIGNAL(SIG_OVERFLOW0) gelesen und veraendert werden!
In der Regel werden globale Variablen in C nicht verwendet, da dann nicht
mehr gewaehrleistet ist dass nur Funktionen, die diese Variable aendern
muessen diese auch nur aendern koennen.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MIK 17
Versuch Nr. 6: Mikrocontroller
// Hier ist es notwendig, da die Variable nicht an eine Unterfunktion
// uebergeben werden kann - SIGNAL(SIG_OVERFLOW0) wird nicht in von einer
// Funktion aufgerufen, sondern bei einer Interruptanforderung direkt
// angesprungen.
uint8_t zaehler;
// ISR (Interrupt Service Routine - Behandlungsfunktion fuer einen Interrupt)
// fuer den Timer-Ueberlauf (siehe Assembler-Beispiel und Glossar) wird diese
// Funktion aufgerufen.
SIGNAL (SIG_OVERFLOW0)
{
// lokale Variable temp definieren. Kann nur innerhalb der ISR gelesen
// und geaendert werden.
uint8_t temp;
// Post-Increment einer Variable:
// Nach der Auswertung eines Ausdrucks wird die Variable um 1 erhoeht
zaehler++;
// Wenn-Dann-Bedingung
if (zaehler >= 37)
{
// zaehler zuruecksetzen
zaehler = 0;
// Eingangspins auslesen
temp = PINB;
// Wenn der Taster gedrueckt ist (siehe Assembler-Beispiel) ...
if ( (temp&(1<<Taster)) == 0 )
{
// ... soll die LED blinken (umgeschalten werden)
toggle_bit(PORTB, LED);
}
}
}
// Hauptprogramm wird nach einem Reset angesprungen.
// Muss immer so (int main(void)) deklariert werden
int main (void)
{
// Ports initialisieren: Eingang + PullUps (siehe Assembler-Beispiel)
PORTA = 0b111;
PORTB = 0xFF;
PORTD = 0b1111111;
DDRA = 0;
DDRB = 0;
DDRD = 0;
// LED konfigurieren: es wird jeweils nur ein Bit geaendert
clear_bit( PORTB, LED );
set_bit( DDRB, LED );
// Timer/Counter 0 konfigurieren: Prescaler auf Clk/64 setzen
// (siehe Assembler-Beispiel)
TCCR0B = 0b011;
// Overflow-Interrupt fuer TC0 einschalten
set_bit( TIMSK, TOIE0);
// Zaehler-Variable initialisieren
zaehler = 0;
// Interrupts global einschalten
sei();
MIK 18
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 6: Mikrocontroller
// Endlosschleife
for(;;);
}
#include <inttypes.h>
#include <avr/io.h>
#include <avr/interrupt.h>
#define Taster
#define LED
PB3
PB4
#define set_bit(port, bit)
( port |= _BV(bit) )
#define clear_bit(port, bit) ( port &= (unsigned char)~_BV(bit) )
#define toggle_bit(port, bit) ( port ^= _BV(bit) )
uint8_t zaehler;
SIGNAL (SIG_OVERFLOW0)
{
uint8_t temp;
zaehler++;
if (zaehler >= 37)
{
zaehler = 0;
temp = PINB;
if ( (temp&(1<<Taster)) == 0 )
{
toggle_bit(PORTB, LED);
}
}
}
int main (void)
{
PORTA = 0b111;
PORTB = 0xFF;
PORTD = 0b1111111;
DDRA = 0;
DDRB = 0;
DDRD = 0;
clear_bit( PORTB, LED );
set_bit( DDRB, LED );
TCCR0B = 0b011;
set_bit( TIMSK, TOIE0);
zaehler = 0;
sei();
for(;;);
}
Nachdem
der
Quelltext
in
das
Editorfenster c
eingegeben
wurde14,
Maschinencode erzeugt werden. Dies erfolgt mit der Build-Schaltfläche
kann
der
oder der F7-
14
Es ist empfehlenswert, nach relativ kurzen Programmierabschnitten das Programm zu kompilieren
um Syntaxfehler möglichst früh zu erkennen. Dies beschleunigt die Fehlersuche erheblich. Auch die
Suche von Fehlern im Algorithmus sollte aus selben Grund früh erfolgen.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MIK 19
Versuch Nr. 6: Mikrocontroller
Taste. War der Vorgang erfolgreich, steht in der letzten Zeile des Ausgabefensters d:
„Build succeeded with 0 Warnings...“
Bild 8: Erzeugen des Programms
3.4 Programmfehlerbereinigung
Die Schwierigkeit bei der Fehlersuche und deren Bereinigung (Debugging) in
Mikrocontrollerprogrammen besteht darin, dass an einem Mikrocontroller in der Regel kein
Monitor und keine Tastatur angeschlossen sind. Dies erschwert das Auffinden eines
Programmfehlers erheblich, da die Speicherinhalte nicht direkt beobachtet werden können.
Um diesem Problem zu begegnen, gibt es mehrere Möglichkeiten:
• Es wird eine Schnittstelle zu einem Eingabe- und Anzeigegerät verwendet, über die
eine gewisse Interaktion mit dem Controller möglich ist, z. B. eine RS232-Verbindung
mit einem PC. Dies erfordert Ergänzungen des Programms, welche die Interaktion
zulassen. Dabei werden nur solche Werte übertragen, die vom Programmierer
vorgesehen sind.
• Verfügt ein Controller über eine JTAG-Schnittstelle kann in der Regel der gesamte
Speicherinhalt ausgelesen werden, Breakpoints gesetzt werden, usw.
• Ein Emulator ersetzt den Mikrocontroller in der elektronischen Schaltung. Der
Befehlssatz und die Ausstattung des Emulators ist identisch mit der des
Mikrocontrollers und der PC hat mittels einer Schnittstellenkarte Vollzugriff auf den
MIK 20
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 6: Mikrocontroller
•
gesamten Speicher des Emulators. Das Mikrocontrollerprogramm läuft unverändert
auf dem Emulator.
Mit einem Simulator kann das Programm auf einem PC ausgeführt und der Speicher
des simulierten Controllers vollständig beobachtet werden. Dies ist normalerweise
der erste Schritt der Fehlersuche, da die Elektronik für den Mikrocontroller noch nicht
vorhanden sein muss. Dies hat aber den Nachteil, dass Fehler, welche auf zeitlicher
Abhängigkeit beruhen (Synchronität von Prozessen) nicht gefunden werden können,
da das Programm auf keinen Fall mit identischer Geschwindigkeit ausgeführt wird,
wie auf dem Mikrocontroller (dazu wäre zumindest ein Echtzeitbetriebssystem für
den Simulator erforderlich!). Außerdem gibt es Einschränkungen im Hinblick auf die
E/A-Schnittstellen. So ist es beispielsweise (abhängig vom Simulator) nicht möglich,
serielle Schnittstellen zu simulieren oder analoge Eingangswerte einzugeben.
Nachdem der Maschinencode wie im vorherigen Abschnitt beschrieben mit „Build“
erfolgreich
erstellt
wurde,
kann
der
Simulator
mit
„Start
Debugging“
(Strg+Alt+Umschalt+F5) gestartet werden. Alternativ kann auch mit „Build and Run“
(Strg+F7) der Debugger automatisch gestartet werden, nachdem der Erstellungsprozess des
Maschinencodes erfolgreich abgeschlossen wurde. Anschließend sieht das AVR Studio
folgendermaßen aus:
Bit=1
DebugSymbolleiste
Bit=0
Status der E/AEinheiten
Breakpoint
Aktueller
Zählerwert
von TC0
(Hex und binär)
Nächster auszuführender Befehl
Watch: Wert der
Variable „zaehler“
Bild 9: Der Debugger
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MIK 21
Versuch Nr. 6: Mikrocontroller
Die Debug-Symbolleiste bzw. deren Funktionen:
Strg+Umschalt+Alt+F5 Start Debugging
Simulation beginnen
Strg+Umschalt+F5
Stop Debugging
Simulation beenden
F5
Run
Ausführen (Variablen nicht aktualisieren!)
Strg+F5
Break
Ausführen pausieren
Umschalt+F5
Reset
Simulator zurücksetzen
Alt+(Zehnertastatur)
Show Next Statement
Anzeige des nächsten auszuführenden Befehls
F11
Step Into
In Funktion hineinspringen
F10
Step Over
Funktion als einen Schritt auführen
Umschalt+F11
Step Out
Aus Funktion herausspringen
Strg+F10
Run To Cursor
Bis zum Textcursor ausführen
Alt+F5
Auto Step
Ausführen (Variablen aktualisieren!)
F9
Toggle Breakpoint
Breakpoint ein-/ausschalten
Remove All Breakpoints Alle Breakpoints entfernen
Umschalt+F9
Quickwatch
Schnelle Watch-Ansicht
Mit diesen Funktionen ist es damit möglich, das Programm gezielt auszuführen und die
Veränderung der Variablen zu beobachten. Außerdem können die Inhalte der Variablen im
„Watch“-Fenster durch Doppelklicken auf deren Wert gezielt verändert werden. Ebenso ist
dies auch mit den Registerinhalten im „I/O View“-Fenster möglich: einzelne Bits können
durch Klicken auf die Quadrate, welche den Zustand des Bits darstellen, umgeschalten
werden oder per Doppelklick auf den Hexadezimalwert kann dem Register ein bestimmter
Wert zugewiesen werden.
3.5 Hinaufladen des Maschinencodes auf den Mikrocontroller
Nachdem der Quellcode soweit erstellt und auf Fehler überprüft worden ist, muss der
resultierende Maschinencode auf den Mikrocontroller hinaufgeladen werden. Dazu wird der
AVRISP von Atmel verwendet.
Bild 10: Der ISP-Programmer
Schließen Sie das ISP-Kabel (sechspoliges Flachbandkabel) an die „In System
Programmer“-Buchse des Mikrocontroller-Einschubes an und schalten, falls noch nicht
geschehen, den Netzschalter hinten rechts am 19“-Gehäuse ein. Nun sollte die Leuchtdiode
in der Nähe des ISP-Kabels grün leuchten. Diese zeigt folgende Zustände des AVRISP an:
MIK 22
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 6: Mikrocontroller
LED-Farbe
gelb
rot
grün
Beschreibung
Programmierung läuft
Programmierung ist fehlgeschlagen
Bereit
Durch Drücken der „Connect“-Schaltfläche
öffnet sich folgendes Dialogfeld:
Bild 11: Einstellungen für den Programmer
Wählen Sie, wie hier zu sehen, als Plattform den „STK500 or AVRISP“ als Port Auto aus und
drücken Sie „Connect…“. Konnte sich die Programmiersoftware mit dem AVRISP verbinden,
erscheint folgendes Dialogfeld:
Bild 12: Programmier Optionen
Unter „Device“ muss ATmega32 ausgewählt sein, bei „Flash“ wählen Sie
„C:\Praktikum\Kreuztisch\default\Kreuztisch.hex“ aus. Der EEPROM-Speicher wird hier nicht
verwendet. Im Dialogfeld-Reiter „Fuses“ sind die für den ATmega32 (bzw. für den in „Device“
ausgewählten Controller) verfügbaren Konfigurationsoptionen aufgeführt.
Bitte ändern Sie nichts in der „Fuses“-Ansicht, da der Mikrocontroller dann
möglicherweise nicht mehr funktioniert!
Im „LockBits“-Reiter kann man Optionen setzen, um die Speicherbereiche des
Mikrocontrollers zu schützen. Damit kann z. B. verhindert werden, dass der Flash-Speicher
nicht mehr lesbar ist (Schutz des geistigen Eigentums!) bevor er vollständig gelöscht wurde.
Jeder Mikrocontroller der AVR-Reihe hat sogenannte „Signature Bytes“ gespeichert. Mit
diesen kann der Controllertyp (z. B. ATmega32) erkannt werden. Die Programmiersoftware
verwendet diese Signature Bytes zum Erkennen, ob der gleiche Mikrocontroller ausgewählt
ist wie der mit dem ISP-Adapter verbundene.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MIK 23
Versuch Nr. 6: Mikrocontroller
Bild 13: Signature Bits
Gibt es beim Programmieren des Controllers Probleme obwohl die Status-LED grün leuchtet,
überprüfen Sie bitte die „ISP Freq“ im „Board“-Reiter. Diese muss kleiner als ¼ der
Taktfrequenz des ATmega32 sein, welcher mit 1 MHz betrieben wird.
Bild 14:Einstellen physikalischer Daten
Wählen Sie bitte im „Auto“-Reiter folgende Optionen:
• Erase Device
• Check signature
• Program FLASH
• Verify FLASH
und minimieren das Fenster (nicht mit X schließen!). Anschließend könne Sie nach dem
Kompilieren des Projektes den Mikrocontroller aus dem AVR Studio heraus mit der „Auto“Schaltfläche
programmieren. Dann werden die oben eingestellten Schritte nacheinander
ausgeführt. Sollen Änderungen an den Programmiereinstellungen vorgenommen werden
verwenden Sie die „AVR“-Schaltfläche
und nicht die „Connect“-Schaltfläche
. Dann
öffnet sich direkt die AVRISP-mkII-Programmieroberfläche mit den vorher vorgenommenen
Einstellungen.
MIK 24
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 6: Mikrocontroller
minimieren
Bild 15: Zu bearbeitende Prozesse
3.6 Beschreibung der Praktikums-Elektronik
Entprellung
Bedienfeld
Schutzbeschaltung
Mikrocontroller
Vcc
Pause
Programmstart
Die Elektronische Schaltung für diesen Versuch ist in drei Hauptkomponenten aufgeteilt. Die
Schrittmotoren sind für die eigentliche Bewegung verantwortlich, die von dem Mikrocontroller
gesteuert wird. Das Verbindungsglied zwischen beiden sind die Motortreiber, welche die
Anpassung zwischen den Logik-Signalen des Mikrocontrollers und der notwendigen
Ausgangsleistung für die Motoren durchführen. Zusätzlich ist noch eine Schutzschaltung
vorhanden, die für die Achseninitialisierung und die Endabschaltung zuständig ist. Das
Bedienfeld stellt die Verbindung zum Benutzer her.
CLKx Motortreiber X
DIRx
Schrittmotor
X
CLKy Motortreiber Y
DIRy
Schrittmotor
Y
Entprellung
End-/
HomeTaster
Bild 16: Die Elektronik zur Schrittmotorsteuerung
Wurde Versuch 5 noch nicht bearbeitet, lesen Sie bitte die grundlegende
Funktionsweise des Schrittmotors nach. Das Verständnis über dessen grundlegende
Theorie ist notwendig für diesen Versuch!
Der Mikrocontroller muss für jede Achse zwei Signale erzeugen, um sie zu bewegen. Einmal
ist dies das Richtungssignal (Drehung im oder entgegen dem Uhrzeigersinn bzw. Bewegung
in positiver oder negativer Achsenrichtung) und ein Taktsignal. Mit jedem Impuls wird der
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MIK 25
Versuch Nr. 6: Mikrocontroller
Motor um einen Schritt in die ausgewählte Richtung bewegt. Beide Achsen müssen
aufeinander abgestimmt werden, damit der Tisch die gewünschte Form abfährt. Die
Motortreiber setzten diese beiden leistungsfreien Signale in die leistungsbehaftete
Bestromung der jeweils zwei Motorwicklungen um.
Der Kreuztisch ist je Achse mit zwei End- und einem Hometaster, sowie weitere Taster als
Benutzerschnittstelle am Bedienfeld. Mechanische Taster prellen, d. h. der Kontakt wird nicht
mit einem Mal geschlossen, sondern wird mehrmals hintereinander geschlossen und wieder
geöffnet. Dies kann dazu führen, dass der Mikrocontroller mehr als einen Tastendruck
registriert. Aus diesem Grund müssen alle Taster entprellt werden. Dies kann durch Software
im Mikrocontroller geschehen, indem ein Tastendruck erst als solcher angenommen wird
wenn der Kontakt für eine vorgegebene Dauer geschlossen ist. Alternativ können sie auch
hardwaretechnisch entprellt werden. Hierbei wird ein Kondensator über Widerstände
aufgeladen und dessen Spannung mittels eines Schmitt-Triggers15 in ein Rechtecksignal
umgewandelt. Wird die Aufladung des Kondensators für kurze Zeit durch Prellen
unterbrochen, vergrößert sich nur die Verzögerung zum Schalten des SchmittTriggerausganges, es gibt aber ein definiertes, prellfreies Signal.
Die Endtaster sind als Öffner geschalten. Somit wird im normalen Betrieb immer Strom
fließen. Sollte ein Kabelbruch oder ähnliches stattfinden, wird fälschlicherweise ein
Tastendruck erkannt und der Kreuztisch in einen sicheren Zustand versetzt: der Antrieb wird
ausgeschalten. Wären die Taster als Schließer angeschlossen, würde ein Endtastzustand
bei Kabelbruch nicht erkannt werden und ein Hardwareschaden wäre nicht ausgeschlossen.
3.7 Allgemeine Informationen
Nach dem Einschalten der Betriebsspannung initialisiert der Hilfsmikrocontroller den
Kreuztisch und fährt ihn in die Ausgangsposition. Ist diese erreicht, kann der Mikrocontroller
mittels der Freigabe-Taste auf dem Bedienfeld freigegeben werden. Erreicht eine Achse
einen der beiden Endtaster, werden beide Achsen sofort angehalten und der Mikrocontroller
von den Motortreibern getrennt. Mittels der Initialisieren-Taste wird der Tisch neu initialisiert
und ist danach wieder einsatzbereit. Sollte die Gefahr eines Zusammenstoßes bestehen,
kann das System durch Drücken des Notaustasters angehalten werden. Zum Beenden des
Notauszustandes den Taster wieder herausziehen und den Tisch mit Initialisieren wieder
initialisieren. Entsprechende Leuchtdioden zeigen den Zustand des Systems an.
Der von Ihnen zu programmierende Mikrocontroller hat zwei Tasten zur Programmsteuerung
vorgesehen: Programmstart und Pause. Es ist Ihre Aufgabe, den Tastern ihre Aufgabe zu
geben.
3.8 Ziel des Versuchs
In diesem Versuch soll eine Ansteuerung programmiert werden, welche den Kreuztisch die
Kontur des „M“ des MiMed-Schriftzuges abfährt. Der Druckkopf muss so angesteuert
werden, dass eben dieses auf einem Papier sichtbar wird. Ihre Aufgabe ist es, eine Funktion
linie() zu schreiben, die den Tisch Linien mit beliebigen Längen und Winkeln bewegen lassen
15
Übersteigt der Eingang des Schmitt-Triggers eine obere Schwellspannung, wird der Ausgang auf
High geschalten, sinkt die Spannung untere Schwellspannung (die niedriger ist als die obere
Schwellspannung – Hysterese) fällt der Ausgang wieder auf Low ab.
MIK 26
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 6: Mikrocontroller
kann. Diese wird von der vorhandenen Funktion kreisbogen() genutzt, um Kreisbögen
zeichnen zu können. Weiterhin ist es Ihre Aufgabe, den Ansteuerimpuls für den Druckkopf zu
erzeugen.
Das Zeichnen der Schriftzuges wird durch Drücken der Taste Programmstart eingeleitet und
kann vorübergehend mit Pause angehalten werden. Eine Leuchtdiode zeigt diesen Zustand
an.
Die Hausaufgabe und die Teilversuche leiten Sie bis zum fertigen Programm.
3.9 Beschreibung des Programm-Grundgerüstes
Grundlage für Ihre Entwicklung ist ein Programmgerüst, welches Sie ergänzen müssen. Die
Hauptdatei ist Praktikum.c. Darin befindet sich die Hauptfunktion main(), reset() sowie die
Interrupt Service Routinen (ISR). main() wird nach einem Reset des Controllers
angesprungen. Diese ruft reset() auf, in der grundlegende Einstellungen vorgenommen
werden, welche für die korrekte Arbeitsweise des Programms in Zusammenarbeit mit der
Hardware notwendig sind, z. B. Einrichtung der E/A-Ports oder der Interruptfunktionen.
Vorhandene Einträge in dieser Funktion bitte nicht löschen oder ändern, ansonsten ist eine
korrekte Arbeitsweise des Programms nicht gewährleistet. Ergänzungen können an
geeigneter Stelle vorgenommen werden!
In der Hauptfunktion zwischen reset(); und return(0); fügen Sie Ihre Funktionsaufrufe ein,
welche den Kreuztisch (linie() und kreisbogen()), die Druckausgabe, etc. steuern.
Die Datei Praktikum.c enthält zwei projektspezifische #include-Anweisungen:
#include "globals.h"
#include "ports.h"
In globals.h sind einige globale Definitionen zu finden. Hierunter fallen insbesondere die
Makros set_bit(), clear_bit() und toggle_bit(), welche bereits bei dem C-Beispielprogramm
beschrieben sind. Weiterhin sind die Definitionen von TRUE und FALSE nützlich. ANSI-C
stellt keine boolsche Variablen (welche die Werte Wahr und Falsch annehmen können)
bereit. Mit diesen beiden Definitionen kann man eine Variable vom Typ uint8_t (und auch
andere Typen) verwenden, um einen Wahrheitswert zu speichern16. Durch Verwendung von
TRUE und FALSE statt 1 und 0 wird der Quellcode einfacher lesbar (damit sind Fehler auch
leichter erkennbar!).
In der Datei ports.h sind Namen für die E/A-Ports definiert, an die die Peripherie (Taster,
LED, Motortreiber und Druckkopf) angeschlossen sind:
#ifndef _PORTS_H
#define _PORTS_H
#define A_Pause_PORT
#define A_Pause
PORTD
PD0
#define E_Programmstart_PIN
PIND
16
Dies ist aus Speichersicht eine sehr ineffiziente Vorgehensweise. Der Variablentyp uint8_t hat 8 Bit
Breite und könnte somit acht boolsche Variablen speichern. Da Speicher bei Mikrocontrollern eine
begrenzte Resource ist, gibt es sparsamere Möglichkeiten, die hier nicht betrachtet werden. Der
geneigte Praktikant sei auf einschlägige Literatur verwiesen.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MIK 27
Versuch Nr. 6: Mikrocontroller
#define E_Programmstart
#define E_Pause_PIN
#define E_Pause
PD1
PIND
PD2
#define
#define
#define
#define
A_DIRx_PORT
A_DIRx
A_STEPCLKx_PORT
A_STEPCLKx
PORTC
PC0
PORTC
PC1
#define
#define
#define
#define
A_DIRy_PORT
A_DIRy
A_STEPCLKy_PORT
A_STEPCLKy
PORTC
PC2
PORTC
PC3
#define A_PenDown_PORT
#define A_PenDown
#endif
PORTD
PD7
Dabei wird folgende Konvention eingehalten: der erste Buchstabe (E bzw. A) gibt die
Signalrichtung an (Ein- bzw. Ausgang bezogen auf den Mikrocontroller). Der folgende Name
(z. B. Pause, DIRx, …) gibt die Funktion an. Wird der so entstandene Name noch mit _PIN
bzw. _PORT handelt es sich um die entsprechenden Register zum Zugriff auf die E/A-Ports
(siehe oben17). Ohne diese Erweiterung ist das eigentliche Bit gemeint (z. B. PD0 = Bit 0 des
E/A-Ports
D).
Somit
sind
beispielsweise
folgende
Befehle
möglich:
clear_bit(A_PenDown_PORT, A_PenDown); Ohne diese Definitionen würde der gleiche
Befehl lauten: PORTD &= (unsigned char)~_BV(PD7);. Beide Schreibweisen sind auf
Grund der getroffenen Definitionen identisch. Entscheiden Sie selber, welche Schreibweise
Sie bevorzugen!
Weiterhin ist die Datei linie.c vorhanden. In diese Datei (in die Funktion void
linie(int16_t Xschritte, int16_t Yschritte){};) fügen Sie Ihren Code zum Fahren
einer Linie ein. In der Datei kreisbogen.c ist die Funktion kreisbogen() definiert.
3.10 Begriffsglossar
Das Begriffsglossar soll zum Nachschlagen von Fachbegriffen dienen. Eine detaillierte
Kenntnis der Begriffe ist für den Versuch nicht notwendig.
•
•
Adressbus
Bus, über den die Adresse des zu lesenden oder schreibenden Datenwortes übertragen wird
Arithmetic Logical Unit (ALU)
Die ALU ist ein Schaltnetz, welches arithmetische (z.B. Addition, Subtraktion) und logische
(UND, ODER, NICHT, Vergleich, …), bitweise Verschiebungen/Rotationen, Bitoperationen, usw.
ausführt. Sogenannte Flags im Statusregister (Teil des Rechenwerks, in dem auch die ALU
beheimatet ist) charakterisieren das Rechenergebnis:
- Carry-Flag: ein Übertrag hat stattgefunden
- Overflow: ein Bereichsüberlauf ist aufgetreten
- Zero: das Ergebnis war null
-…
17
Zur Erinnerung: das PORT-Register legt den Ausgangspegel fest, oder ob der Pull-Up-Widerstand
(als Eingang geschalten) verwendet wird. Das PIN-Register enthält die Pegel der Eingänge.
MIK 28
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 6: Mikrocontroller
•
•
•
•
•
•
•
•
•
•
•
•
•
Application Specific Integrated Circuit (ASIC)
Anwendungsspezifische integrierte Schaltkreise sind ICs welche für einen bestimmten
Anwendungsfall entwickelt und hergestellt werden. Diese sind in der Regel nur in einem ganz
bestimmten Produkt oder Produktreihe verwendbar. Die Herstellung erfolgt über
maskenorientierte Prozesse.
AVR
Markenname für die Acht-Bit-Mikrocontroller von Atmel
AVR GCC
Crosscompiler (d. h. das Programm wird auf einem anderen Rechnersystem entwickelt und
compiliert (hier: PC) als es später ausgeführt wird/werden kann (hier: AVR-Mikrocontroller) für
C/C++-Programmen für AVR-Mikrocontroller basierend auf der GNU-Compiler-Collection (GCC),
lizenziert unter der GPL, d. h. der Quellcode und das das ausführbare Programm ist kostenlos
erhältlich
AVR libc
avr-libc ist eine Bibliothek mit Funktionen für AVR-Mikrocontroller, welche die ANSI-C-Befehle
ergänzt. Darunter fallen z. B. die Definition von Variablen (uint8_t als 8 Bit vorzeichenlose
Ganzzahl) über mikrocontrollerspezifische Funktionen (Stromsparmodi, Timer-Funktionen,
zeitdauerbasierte Wartefunktionen, Verwendung des TWI, EEPROM-Zugriff, …) bis hin zu
mathematische Funktionen (sin, cos, …).
Breakpoint
Markierung einer Quelltextzeile bzw. Maschinencodeadresse welche den Simulator oder
Prozessor anweist, den Programmablauf an dieser Stelle zu unterbrechen
Brown-Out-Detektor
Brown-Out bezeichnet das langsame Sinken der Versorgungsspannung. Der brown-out Detektor
erkennt dies und führt einen Reset des Mikrocontrollers durch wenn diese unter einen
festgesetzten Wert sinkt und verhindert so Fehlberechnungen durch zu niedrige
Versorgungsspannung
Bus
Datenverbindung, an der mehr als zwei Teilnehmer angeschlossen sind
Busbreite
Anzahl der Bit die gleichzeitig über einen Bus übertragen werden („parallele Leitungen“)
CISC (Complex Instruction Set Computing)
Neben den elementaren Befehlen wie bei den RISC-Prozessoren verfügen diese über
zusätzliche Befehle welche aufwendige Aufgaben durchführen. Der Maschinencode wird kürzer,
benötigt aber mehr oder größere Befehlsworte. Mit dieser Komplexität steigt auch der Preis des
Mikrocontrollers. Oft benötigen auch die elementaren Maschinenbefehle mehr Taktzyklen zur
Abarbeitung als bei RISC-Prozessoren.
CPU (Central Processing Unit)
besteht aus Rechenwerk und Steuerwerk
Datenbus
Bus, über den Daten, also Speicher-, Register oder Peripherieportinhalte übertragen werden
(Daten-)wort
Zusammenfassung mehrerer Bits zu einer logischen Einheit, z. B. 8 (Byte), 16, 32, … Bit. In der
Regel kann immer nur auf ein ganzes Datenwort zugegriffen werden. Sollen nur einzelne Bits
verändert werden muss dies über Bitoperationen (AND, OR, XOR, …) erfolgen.
Debuggen
Suche von Softwarefehlern und deren Beseitigung
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MIK 29
Versuch Nr. 6: Mikrocontroller
•
•
•
•
•
•
•
•
•
•
DRAM (Dynamic Random Access Memory)
flüchtiger, dynamischer Speicher mit wahlfreiem Zugriff
RAM verliert im Gegensatz zu ROM-Speichern den Speicherzelleninhalt wenn die
Versorgungsspannung abgeschaltet wird. Im Gegensatz zum SRAM verliert DRAM mit der Zeit
seinen Speicherinhalt durch Kriechströme. Ebenso beim Auslesen einer Speicherzelle. Deshalb
ist ein eigener DRAM-Controller notwendig, welcher in regelmäßigen Abständen den Speicher
ausliest und wieder neu beschreibt (auffrischt). Bei großen Speichergrößen ist dies trotzdem
noch wesentlich billiger als die Verwendung von SRAM, da die Speicherzelle wesentlich
einfacher aufgebaut ist.
E/A-Werk (Ein-/Ausgabe-Werk)
Das E/A-Werk enthält die Ein-/Ausgaberegister, welche die Schnittstelle zwischen der CPU und
den eigentlichen Ein-/Ausgabeeinheiten (z. B. Transistoren zum Treiben eines
leistungsbehafteten Stromes oder dem Analog-Digital-Wandler)
EEPROM (Electrically Eraseable Programmable Read-Only Memory)
nichtflüchtiger elektrisch löschbarer programmierbarer Nur-Lese-Speicher, Speicherinhalte
können mit einem Programmiergerät oder z. T. auch mit dem Mikrocontroller selber gelöscht und
wieder beschrieben werden. Dient bei Mikrocontrollern oft zur dauerhaften Speicherung von
Einstellungsdaten die aber auch wieder geändert werden können müssen.
EPROM (Eraseable Programmable Read-Only Memory)
nichtflüchtiger löschbarer programmierbarer Nur-Lese-Speicher, kann durch UV-Licht gelöscht
und mit Programmiergeräten wieder beschrieben werden.
Flash-EEPROM
wie gewöhnliches EEPROM ein nichtflüchtiger elektrisch löschbarer programmierbarer Nur-LeseSpeicher, wobei in der Regeln nicht einzelne Datenworte gelöscht werden können sondern nur
größere Blöcke
Field Programmable Gate Array (FPGA)
In freiprogrammierbaren Logikschaltkreisen können Logikoperationen wie AND, OR, NOT, XOR
beliebig miteinander verknüpft werden. Da FPGAs in der Regel mehrfach programmierbar sind,
können Programmfehler und -erweiterung auch während der laufenden Herstellung des
Endprodukts eingebracht werden. Die Aufgaben können bei entsprechender Programmstruktur
stark parallelisiert abgearbeitet werden.
IC (Integrated Circuit)
Integrierter Schaltkreis – ein Schaltkreis auf einem Bauteil, bestehend aus einigen wenigen
funktionalen Einheiten (Widerstand, Kondensator, Transistor, …) (Logikgatter: AND, OR, …) bis
hinauf zu vielen Millionen (Pentium 4: 42 Millionen)
Interrupt
Es wird ein Zustand erreicht, der dazu führt, dass der Mikrocontroller die Abarbeitung des
Programms anhält und vorübergehend eine Unterfunktion (Interrupt Service Routine, ISR)
bearbeitet. Ist deren Abarbeitung abgeschlossen, wird das Programm an der Stelle fortgesetzt,
an der es unterbrochen wurde. Die Ursache für einen Interrupt kann innerhalb (z. B. der Zähler
eines Timer/Counters erreicht einen bestimmten Wert) oder außerhalb (z. B. es wurde ein Taster
gedrückt) des Mikrocontrollers liegen.
Interrupt Service Routine, ISR
Wird ein Interrupt ausgelöst, hält der Mikrocontroller die Bearbeitung des Programms an und führt
vorübergehend eine Unterfunktion, die Interrupt Service Routine, aus. Nach deren Beendigung
wird das Programm an der Stelle fortgesetzt, an der es unterbrochen wurde.
ISP (In System Programmable)
Schreiben des Programmcodes auf den Mikrocontroller wenn er bereits auf der Platine verbaut ist
MIK 30
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 6: Mikrocontroller
•
•
•
•
•
•
– Ermöglicht auch das Aufspielen von fehlerkorrigierten oder funktionsergänzter Software beim
Kunden.
ISR
siehe Interrupt Service Routine
JTAG (Joint Test Action Group, IEEE-Standard 1149.1)
Schnittstelle u. a. zum Debuggen von Mikrocontroller-Software
Overflow
siehe Überlauf
Peripherie
Teile des Mikrocontrollers, die eine Verbindung mit der Umwelt herstellen, z. B. digitale E/ASchnittstellen, PWM, ADC, serielle Schnittstellen
PROM (Programmable Read-Only Memory)
nichtflüchtiger programmierbarer Nur-Lese-Speicher, der Speicherinhalt kann exakt einmal mit
einem speziellen Schreibgerät definiert werden.
Pull-up-/Pull-down-Widerstände
Digitale Eingänge von Mikrocontrollern oder auch Logik-Gatter brauchen stets ein eindeutiges
Eingangspotential. Ist dies nicht gegeben (obere Zeile in der Abbildung bei geöffnetem Schalter)
kann der Eingang durch äußere Störstrahlung (Mikrocontroller werden im MHz-Bereich
betrieben!) hochfrequent schwingen. Dies wird durch Pull-up- bzw. Pull-down-Widerstände
vermieden, die den Eingang bei geöffnetem Schalter auf ein eindeutiges Potential,
Betriebsspannung Vcc bzw. Masse GND, legen.
Vcc
DigitalEingang
Vcc
DigitalEingang
Rpulldown
•
•
•
•
•
Rechenwerk
Das Rechenwerk besteht aus der ALU sowie Hilfs- und Statusregistern.
Register
sind kleine Speicherbereiche, welche meist im Prozessor enthalten sind. Der Prozessor kann
extrem schnell auf deren Inhalt zugreifen, im Gegensatz zum vergleichsweise langsamen Cacheoder Hauptspeicher.
RISC (Reduced Instruction Set Computing)
Der Befehlssatz des Mikrocontrollers besteht aus einfachen, schnell auszuführenden (meist ein
oder wenige Prozessortakte) Befehle (z. B. Addition, Subtraktion, Vergleiche, …). Aufwendige
Berechnungen müssen durch mehrere einzelne Befehle durchgeführt werden.
ROM (Read-Only Memory)
nichtflüchtiger Nur-Lese-Speicher, Speicherinhalt wird bei der Herstellung definiert
(„Maskenprogrammiert“)
Schaltnetz
Ein Schaltnetz ist eine Gruppe von logischen Gattern (AND, OR, XOR), welches Eingangswerte
miteinander verknüpft und daraus Ausgangswerte ableitet. Ein Schaltnetz besitzt im Gegensatz
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MIK 31
Versuch Nr. 6: Mikrocontroller
•
•
•
•
•
•
•
•
•
zum Schaltwerk keinen Speicher, somit sind die Ergebnisse unabhängig von der Vorgeschichte
des Schaltnetzes.
Schaltwerk
Ein Schaltwerk ist eine Kombination aus einem Schaltnetz und Speicher. Das Ergebnis des
Schaltnetzes ist abhängig von den Eingangswerten, aber auch von der Vorgeschichte, welche im
Speicher abgelegt ist.
Speicherwerk
enthält die Programm- und Datenspeicher sowie Speicherregister. Das Auswahlregister enthält
die Speicherzelle auf die zugegriffen wird, das Speicherregister ist die Datenquelle bei
Schreibzugriff bzw. Datensenke bei Lesezugriff auf die ausgewählte Speicherzelle.
SRAM (Static Random Access Memory)
flüchtiger, statischer Speicher mit wahlfreiem Zugriff
RAM verliert im Gegensatz zu ROM-Speichern den Speicherzelleninhalt wenn die
Versorgungsspannung abgeschaltet wird. Da SRAM im Gegensatz zu DRAM keinerlei
Auffrischung benötigt ist der Zugriff schneller. Der aufwendigere Aufbau macht ihn jedoch um ein
vielfaches teurer.
Steuerbus
Über ihn werden die Busanforderung, Interrupts, das Handshaking usw. zwischen der CPU, den
Hardware-Komponenten und Peripheriegeräten gesteuert.
Steuerwerk
Das Steuerwerk (auch Leitwerk) ist der Kern des Mikroprozessors. Im Steuerwerk befinden sich
Befehlsregister und Befehlsdecoder. Seine Aufgabe ist die Abarbeitung des Programms, d. h.
Befehl für Befehl eines Programmes werden durch das Steuerwerk des Mikroprozessors
ausgeführt.
Taktfrequenz
periodisches Signal welches dem Prozessor oder andere Verarbeitungseinheiten dazu
veranlasst, den nächsten Schritt auszuführen (bei einer seriellen Datenübertragung wird
beispielsweise veranlasst, dass das nächste Bit übertragen wird)
Überlauf
Wird einem Register ein größerer Wert zugewiesen als es auf Grund seiner Bitbreite speichern
kann, tritt ein Überlauf auf. Nur die niederwertigen Bits, die der Registerbreite entsprechen,
werden übernommen und die höherwertigen werden verworfen (Datenverlust!).
Enthält beispielsweise ein 8-Bit Register seinen Maximalwert von 255 (28-1) und wird es um 1
erhöht, benötigt der neue Wert 256 (0b1 0000 0000) 9 Bitstellen. Das Ergebnis der Operation ist
dann „0“ (sic!) bei Auftritt eines Überlaufs.
WinAVR
ist eine Zusammenstellung von Programmen von quelloffenen Programmen zur Programmierung
von AVR Mikrocontrollern unter Microsoft-Windows-Betriebssystemen. Enthält auch den AVR
GCC C/C++ Crosscompiler
Zielsystem
elektronische Schaltung, in der der Mikrocontroller betrieben wird
MIK 32
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 6: Mikrocontroller
3.11 Glossar C-Programmierung
Unter einem Ausdruck versteht man die Verknüpfung von Operanden (Werte, z. B.
Variable, Konstante) mittels Operatoren zu einem neuen Wert.
Operatoren
Konventionelle arithmetische Operatoren
+
Addition
-
Subtraktion
*
Multiplikation
/
Division (Ganzzahl- und Gleitkomma-)
%
Modulo (Divisionsrest)
=
Zuweisung
Inkrement-/Dekrement-Operatoren
++
Inkrement (+1)
--
Dekrement (-1)
Beide Operatoren können als Pre- und als Postfix verwendet werden.
Prefix sind der Variable vorangestellt, diese wird vor dem lesen um eins erhöht
bzw. erniedrigt. Als Postfix sind sie der Variable nachgestellt und diese wird nach
dem Lesen um eins erhöht/erniedrigt.
x=++n; entspricht n=n+1; x=n;
x=n--; entspricht x=n; n=n-1;
Vergleichsoperatoren
>
Größer
>=
Größer gleich
<
Kleiner
>=
Kleiner gleich
==
Gleich
!=
ungleich
Logische Operatoren
&&
Und ((x==1) && (y==2)) Æ x muss 1 sein und y muss 2 sein
||
Oder ((x==1) || (y==2)) Æ x muss 1 sein oder y muss 2 sein
!
Negierung (vorangestellt)
(!(x==1) && (y==2)) Æ x darf nicht 1 sein und y muss 2 sein
Logische Ausdrücke mit && und || werden von links nach rechts ausgewertet bis
das Ergebnis feststeht
Bitmanipulation
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MIK 33
Versuch Nr. 6: Mikrocontroller
&
Bitweises UND (1001 & 1010 = 1000)
|
Bitweises ODER (1001 | 1010 = 1011)
^
Bitweises exklusives ODER (XOR; EOR) (1001 ^ 1010 = 0011)
~
Bitweise Negation (1-Komplement) (~1001 = 0110)
Schiebeoperatoren
<<
Linksschieben ( 0110 << 2 = 011000 (entspricht Multiplikation mit 4))
>>
Rechtsschieben ( 0110 >> 2 = 01 (entspricht Division durch 4))
Anweisungen
while( Ausdruck ) { Anweisung }
Abweisende Schleife – Überprüfung des Ausdrucks vor Ausführen der Anweisung.
Diese wird so oft ausgeführt bis Ausdruck wahr wird. Ist dieser bereits vor dem whileAufruf wahr, wird Anweisung nicht ausgeführt.
i=1; while (i<10) { i++; }
do { Anweisung } while ( Ausdruck );
Nichtabweisende Schleife (siehe while)
Anweisung wird so lange ausgeführt wie Ausdruck wahr ist, mindestens jedoch 1x.
i=1; do { i++, } while ( i<100 );
if( Ausdruck ) { Anweisung1 } <else { Anweisung2 }>
Auswahl einer Alternative. Wenn Ausdruck wahr ist wird Anweisung1 ausgeführt
ansonsten Anweisung2 (optional).
i=1; if (i==2) { PORTB=0x7f } else { PORTB=0x6f }
switch ( Ausdruck ) {
case konst.Ausdruck1: Anweisungen1; break;
case konst.Ausdruck2: Anweisungen2; break;
default: Anweisungen3;}
Realisierung der Auswahl zwischen mehr als zwei Möglichkeiten
Der
hinter
switch
stehende
Ausdruck
(Verzweigungsausdruck)
muss
ein
ganzzahliges Ergebnis liefern (int oder char).
Der jeweils hinter "case" stehende Ausdruck darf nur konstante Operanden enthalten
(konstanter Ausdruck) und muss ebenfalls ein ganzzahliges Ergebnis (Fallwert) liefern.
Alle Fallwerte müssen unterschiedlich sein, ihre Reihenfolge ist beliebig. Auch die
Stellung der Default-Marke ist beliebig.
Der Verzweigungsausdruck wird ausgewertet und mit allen Fallwerten verglichen. Bei
Übereinstimmung wird das Programm mit der hinter dem entsprechenden Fallwert
stehenden Anweisung fortgesetzt. --> Die Fallwerte dienen als Marken für die
MIK 34
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 6: Mikrocontroller
Programmfortsetzung.
Stimmt der Wert des Verzweigungsausdrucks mit keinem Fallwert überein, ist aber die
Default-Marke vorhanden, wird das Programm mit der hinter dieser Marke stehenden
Anweisung fortgesetzt. Ist die Default-Marke nicht vorhanden, mit der auf die SwitchAnweisung folgenden Anweisung fortgesetzt.
Eine echte Mehrfachauswahl wird durch die Switch-Anweisung erst zusammen mit der
Break-Anweisung realisiert.
for ( Ausdruck1; Ausdruck2; Ausdruck3 ) { Anweisung }
Ausdruck1: Anfangsausdruck wird einmal zu Beginn der for-Schleife ausgeführt
Ausdruck2: Bedingungsausdruck wird auf Wahrheit überprüft vor jedem Ausführen von
Anweisung
Ausdruck3: Veränderungsausdruck wird nach Überprüfung des Bedingungsausdrucks
ausgeführt.
for (i=1; i<100; i++) {PORTB = PORTB ^ 0x10}
„Setze i=1; wenn i<100, dann schalte 4. Bit in PORTB um und erhöhe i um 1.“
for (;;) {PORTB = PORTB ^ 0x10}
„Schalte 4. Bit in PORTB um, bis der Strom weg ist.“
3.12 AVR libc Funktionen
Die AVR libc ist eine Bibliothek mit Funktionen für AVR-Mikrocontroller. Sie stellt neben
Variablentypen und controllerspezifischen Definitionen Funktionen zum Nutzen einiger der
Funktionen (z. B. Interruptbehandlung, Powermanagement, EEPROM) der Mikrocontroller
bereit, allgemein nützliche Funktionen (z. B. Parity-Bit-Berechnung, Warteschleifen) sowie
allgemeine Funktionen wie Berechnung von sin, cos. Hier werden die für die Versuche
wichtigen Teile vorgestellt. Weitergehende Informationen sind in der Dokumentation zur AVR
libc zu finden. In Klammern hinter dem Gruppennamen wird die Header-Datei angegeben,
welche eingebunden werden muss, um die Funktionen nutzen zu können.
Variablentypen (#include <inttypes.h>)
int8_t
8 Bit vorzeichenbehaftete Ganzzahl
uint8_t
8 Bit vorzeichenlose Ganzzahl
int16_t
16 Bit vorzeichenbehaftete Ganzzahl
uint16_t
16 Bit vorzeichenlose Ganzzahl
Wartefunktionen (#include <avr/delay.h>)
_delay_ms(double __ms)
Verzögert die Programmausführung um bis zu
260 ms
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MIK 35
Versuch Nr. 6: Mikrocontroller
_delay_us(double __us)
Verzögert die Programmausführung um bis zu
768 µs
Interrupt-Behandlung (#include <interrupt.h>)
SIGNAL(Interruptname) {}
Ein Makro zur Definition von ISRs. Zusätzlich muss
noch der Interrupt aktiviert werden. Siehe Datenblatt
zum jeweiligen Mikrocontroller
sei()
Erlaubt global Interrupts
cli()
Verbietet global Interrupts
Funktionen zur Manipulation von Registern (#include <avr/io.h>)
_BV(bit)
Setzt nur das Bit mit der Nummer bit. Ist definiert
als „1<<bit“
bit_is_clear(sfr, bit)
Überprüft, ob das Bit Nummer bit im Register sfr
gelöscht (0) ist
bit_is_set(sfr, bit)
Überprüft, ob das Bit Nummer bit im Register sfr
gesetzt (1) ist
loop_until_bit_is_clear (sfr,bit)
Wartet bis Bit Nummer bit im Register sfr gelöscht
(0) ist
loop_until_bit_is_set (sfr,bit)
Wartet bis Bit Nummer bit im Register sfr gesetzt
(1) ist
Praktikumsspezifische Funktionen zur Bitmanipulation
clear_bit(sfr, bit)
Setzt (1) das Bit Nummer bit im Register sfr
set_bit (sfr, bit)
Löscht (0) das Bit Nummer bit im Register sfr
toggle_bit(sfr, bit)
Schaltet das Bit Nummer bit im Register sfr um
(0 Æ 1 oder 1 Æ 0)
4 Hausaufgaben
Bearbeiten Sie die Hausaufgaben sorgfältig und vollständig, da deren Ergebnisse in den
Praktikumsaufgaben benötigt werden! Zum erfolgreichen Ablegen des Versuchs kommen
Sie somit nicht umhin, sie gewissenhaft zu erledigen. Geschieht dies erst beim Versuch,
verlängert sich dessen Dauer unnötigerweise. Die Hausaufgaben sind vollständig mit den
Informationen zu bearbeiten, die Ihnen mit diesem Skript zur Verfügung gestellt werden.
Arbeiten Sie aus diesem Grund auch die vorherigen Kapitel dieses Versuchs auf! Die
Kommentare in den Beispielprogrammen enthalten wichtige Informationen zum Bearbeiten
der Hausaufgaben und Praktikumsaufgaben!
MIK 36
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 6: Mikrocontroller
1. Stellen Sie die Vorgehensweise zum Verfahren der X-Achse (in positiver und negativer
Richtung) um n Schritte graphisch dar (z. B. Nassi-Shneidermann- oder Flussdiagramm; n sei eine ganze Zahl)! Der Schrittmotor wird über einen Schrittmotortreiber
angesteuert, wie er auch in Versuch 5 verwendet wird. Dieser benötigt ein Richtungsund ein Taktsignal zum Bewegen der Achse. Verwenden Sie hierzu die in ports.h
verwendeten Definitionen: A_DIRx legt die Drehrichtung fest, A_STEPCLKx ist für die
Erzeugung des Taktsignals (Schrittbewegung) verantwortlich! Die Takt- bzw.
Schrittfrequenz von 5 Hz soll eingestellt werden durch Einfügen einer Pause. Der Motor
wird bei der steigenden Flanke (Übergang von 0 nach 1) entsprechend der gewählten
Richtung weiterbewegt.
2. Zeigen Sie auf, wie dieses Struktogramm ergänzt werden muss, damit der Tisch eine
Gerade fährt, welche durch n Schritte in X und m Schritte in Y-Richtung definiert ist (es
ist nicht erforderlich, ein Struktogramm zu zeichnen)!
3. Machen Sie sich nun Gedanken, wie Sie das Hauptprogramm gestalten, insbesondere
im Hinblick wie die Erkennung des Druckes auf die Programmstart-Taste erkannt wird
(was soll der Mikrocontroller machen wenn die Taste nicht gedrückt ist? Siehe auch
Befehlsglossar)!
4. Um Drucken zu können, muss der Druckkopf bzw. dessen Ansteuerung mit einem
Signal mit einer Frequenz von 1 kHz versorgt werden, d. h. es soll an einem Pin des
Mikrocontrollers ein symmetrisches Rechtecksignal mit 1 kHz erzeugt werden (welche
Puls- und Pausedauern hat das Signal?)! Dies soll mit dem Timer/Counter2 erfolgen.
Wie ist der Timer/Counter2 zu konfigurieren (im Non-PWM-Modus bzw. „Normal
Operation“)? Ziehen Sie dazu den Anhang mit dem Auszug aus dem Datenblatt des
Atmel ATmega32 zu Rate!
5. Schließlich ist noch dem Pause-Taster eine Funktion zu geben. Dies erfolgt mit dem
externen Interrupt 0 (INT0). Schlagen Sie hierzu auch im Datenblatt unter „External
Interrupts“ nach! Der Interrupt soll bei der fallenden Flanke („falling edge“ = drücken des
Tasters, siehe auch „Pull-up-/Pull-down-Widerstände“ im Glossar) ausgelöst werden.
5 Praktikumsaufgaben:
Für die Bearbeitung der Aufgaben wird empfohlen, neben den ANSI-C-Befehlen Funktionen
der AVR libc zu verwenden. Es ist nicht notwendig, aber erlaubt, eigene Funktionen zu
schreiben. Wenn Sie sich dazu entschließen, beachten Sie bitte, dass Sie dann
möglicherweise mit Header-Dateien arbeiten müssen, da das Projekt auf mehrere
Quelldateien aufgeteilt ist. Sind Sie nicht in der C-Programmierung versiert, kann dies zu
unnötigen Schwierigkeiten führen (falls Sie sich dennoch dazu entscheiden, dürfen Sie
natürlich die vorhandenen Header- und Quelldateien als Vorlage nehmen!).
Die Verwendung des Simulators/Debuggers wird nicht explizit gefordert und ist in dem Sinn
auch nicht Teil der Aufgaben. Seine Verwendung erleichtert aber die Fehlersuche erheblich!
Die einzelnen Programmteile sollten in kleineren Teilen erstellt und simuliert werden, um so
möglichst früh Programmfehler zu finden.
1. Melden Sie sich am Praktikumsrechner mit dem Benutzername Praktikum und leerem
Passwort an und starten Sie das AVR Studio. Laden Sie nun das Beispielprojekt unter
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MIK 37
Versuch Nr. 6: Mikrocontroller
C:\Praktikum\Beispiel\Beispiel.aps und kompilieren es. Machen Sie sich nun mit dem
Debugger vertraut indem Sie das Programm schrittweise ausführen. Beobachten Sie im
„Watch“-Fenster, wie sich die Variablen verändern und „I/O View“ wie sich PORTB
ändert bzw. „drücken“ Sie den Taster (PB3) indem Sie auf das vierte Quadrat von rechts
in PINB klicken. Nutzen Sie dazu auch gezielt Breakpoints, Auto-Step, usw.
Schließen Sie nun die Achsen des Kreuztisches an die jeweiligen Buchsen der Motortreiber
und das ISP-Kabel des AVRISP an den „In System Programmer“-Anschluss des
Mikrocontroller-Moduls im 19“-Gehäuse an und schalten dieses am Netzschalter rechts
hinten ein. Wenn der Kreuztisch initialisiert ist, stecken Sie die Achsen wieder ab. Öffnen Sie
nun
mit
„Open
Project“
aus
dem
Menüpunkt
„Project“
das
Projekt
C:\Praktikum\Kreuztisch\Kreuztisch.aps.
2. Nach Drücken des Tasters Programmstart (E_Programmstart) soll die Takt-Leuchtdiode
(A_STEPCLKx) der X-Achse für eine bestimmte Anzahl mit 5 Hz blinken. Fragen Sie den
Taster im Hauptprogramm zwischen reset(); und return(0); ab! Eine
Endlosschleife soll ein mehrfaches Aufrufen der Funktion nacheinander ermöglichen.
Implementieren Sie das Blinken in der Funktion linie()! Der Funktionsparameter
Xschritte gibt die Anzahl vor, wie oft die LED blinken soll. Hinweis: Verwenden Sie
eine Funktion, die eine vorzugebende Zeit wartet (siehe AVR libc)!
3. Implementieren Sie eine Interrupt Service Routine (ISR), welche aufgerufen wird, wenn
der Pause-Taster (E_Pause; INT0) gedrückt wird! Konfigurieren Sie den Interrupt so,
dass er bei der fallenden Flanke des Signals ausgelöst wird (siehe Hausaufgabe)!
Fügen Sie die Befehle dazu in die Funktion reset(); unmittelbar vor sei(); ein! Die
eigentliche ISR ist SIGNAL(SIG_INTERRUPT0){}. Schalten Sie die Pause-LED
(A_Pause) mit jedem Tasterdruck um!
4. Implementieren Sie die Pause-Funktion in linie()! Fragen Sie dazu den Zustand der
Pause-LED ab! Leuchtet sie, soll die Takt-LED nicht mehr blinken bis die Pause-LED
ausgeschaltet ist.
5. Passen Sie die Funktion linie() so an, dass Sie die X-Achse mit einer Schrittfrequenz
von 500 Hz in positiver oder negativer Richtung (A_DIRx) um eine bestimmte
Schrittanzahl (Xschritte) bewegen können! Hinweis: Belassen Sie zunächst die
Frequenz bei 5 Hz und testen Sie die Funktion! Denken Sie an die Pause-Funktion!
6. Ergänzen Sie linie() so, dass auch die Y-Achse angesteuert wird und so Linien mit
folgenden Winkeln gefahren werden können: 45°, 135°, 225° und 315°! Stellen Sie dazu
die Fahrrichtung der Achsen über die Vorzeichen der Funktionsparameter (Xschritte,
Yschritte) ein und verwenden den Betrag von Xschritte als zu fahrende Schritte
sowohl für die X- als auch für die Y-Achse! Beachten Sie, dass es nicht erlaubt ist,
zuerst die X- und danach die Y-Achse zu verfahren! Es soll später möglich sein, den
Tisch unter dem (feststehenden) Druckkopf zu bewegen und mit diesem Linien mit
beliebiger Länge und beliebigen Winkel zu zeichnen. Denken Sie an die PauseFunktion!
7. Erzeugen Sie mit dem Timer/Counter2 (TC2) ein Taktsignal (A_PenDown) von 1 kHz für
den Druckkopf. Fügen Sie die Befehle zum Konfigurieren des TC2 in die Funktion
reset();
unmittelbar
vor
sei();
ein!
Die
eigentliche
ISR
ist
SIGNAL(SIG_OUTPUT_COMPARE2){}. Definieren und verwenden Sie eine globale
MIK 38
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 6: Mikrocontroller
Variable mit der das Taktsignal ein- und ausgeschaltet werden kann! Denken Sie auch
an die Pause-Funktion!
8. Testen
Sie
die
Kreisbogenfunktion,
die
folgendermaßen
definiert
ist:
void kreisbogen(int16_t Xmittelpunkt, int16_t Ymittelpunkt, double PHIra
d);!
Diese Funktion fährt einen Kreisbogen mit dem vorzeichenbehafteten Winkel
(Bogenmaß) PHIrad um den Mittelpunkt (Xmittelpunkt, Ymittelpunkt) relativ zur aktuellen
Position.
9. Setzen Sie nun aus linie(), kreisbogen() und der globalen Variable für die
Druckkopfansteuerung ein Programm zusammen, das den Umriss des „M“ des MiMedLogos zeichnet!
(251/419)
(136/352)
(366/352)
2,5rad
2,5rad
(162/326)
(342/326)
(180/0)
(0/0)
(142/0)
(322/0)
(360/0)
(502/0)
10. Machen Sie nun den Druckkopf betriebsbereit und zeichnen Sie das „M“ auf ein Papier!
6 Auszug aus dem Datenblatt des Atmel ATmega32
Zentraler Bestandteil eines AVR-Datenblattes ist die Beschreibung der Register, welche die
Funktionen des Controller steuern. Vor jeder Register-Beschreibung ist das Register mit
Name, Bitnamen, Zugriffsart (lesen, schreiben) dargestellt:
Registername
Bit-Nummer (0: niederwertigstes Bit; 7: höhöchstwertigstes Bit)
Bitname (nur weiße Bitnamen werden in diesem
Abschnitt betrachtet, nicht aber graue)
Angabe ob das Bit gelesen, geschrieben oder beides werden darf
Im Anschluss daran werden die Funktionen der einzelnen Bits in Abhängigkeit deren Wert
(0, 1) erklärt.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
MIK 39
Versuch Nr. 7: Mikroskopie
Beschreibung zu Versuch Nr. 7:
Mikroskopie
Markus Vogl
1 Einordnung
In der Mikrotechnik spielt die Bauteilkontrolle eine besondere Rolle. Deshalb werden hier
zahlreiche Verfahren eingesetzt, um Objekte vergrößert darzustellen. Zu diesen Verfahren
zählen: Die Lichtmikroskopie, Rasterelektronmikroskopie und allgemeine Topometrieverfahren wie Weisslichtinterferometrie und Streifenlichtprojektion. Zu diesen Methoden kommen
noch taktile Messverfahren, die mit Rasterabtastung 3D-Profile erzeugen. Hierzu zählen die
Profilmessgeräte wie Rauheitsmessgeräte und Rasterkraft- oder Tunnelmikroskope.
Für die Dimensionen der Mikrotechnik spielt die Lichtmikroskopie eine herausragende Rolle.
Es können hier Strukturen bis herunter zu einem Mikrometer noch sicher aufgelöst werden.
Genauere Auflösungen sind meist nicht erforderlich.
Die hohe Tiefenschärfe eines Rasterelektronenmikroskops (REM) kann mit manuellen
Lichtmikroskopen nicht erreicht werden. Bei der sogenannten Digitalmikroskopie werden
aber durch automatische Fokusverstellung und digitale Bildverarbeitung ähnliche Bilder
erzielt. Hier macht sich aber dann ein wesentlicher Vorteil von Lichtmikroskopen bemerkbar:
Die Darstellung ist in Farbe und besitzt damit eine weitere Dimension mit deren Hilfe
Aussagen abgeleitet werden können.
Ein weiterer Vorteil von Lichtmikroskopen liegt in der einfachen Handhabung. Die Probe
kann ohne weitere Vorbehandlung unter normaler Atmosphäre betrachtet werden. Dadurch
können auch Verschmutzungen und Flüssigkeiten betrachtet werden. Beim REM dagegen
müssen die Proben entfettet und getrocknet werden, da Rückstände in der
Hochvakuumkammer verdampfen würden und das REM verschmutzen würden. Des
Weiteren müssen nicht elektrisch leitende Materialien zum betrachten im REM vergoldet
werden. Die Beobachtung erlaubt zudem das Arbeiten unter dem Mikroskop.
Für den Praktikumsdrucker ermöglicht das Mikroskop zwei Methoden zur Beurteilung der
erzeugten Ergebnisse. Zum einen können die Tropfen auf dem Papier vermessen werden.
Bild 1: Druckbild eines länglich ausgebrachten Tropfens auf gestrichenem Papier
Dabei kann beurteilt werden, wie der Tropfen verläuft, wie saugfähig der Untergrund ist oder
ob der 3D-Aufbau mit Wachs funktioniert und wie die Parameter eingestellt werden müssen.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
OPT 1
Versuch Nr. 7: Mikroskopie
Zum anderen können die Tropfen bei ihrem Flug beobachtet werden. Dazu werden sie mit
einem Stroboskop beleuchtet. Die so entstehenden Bilder geben wertvolle Einblicke in die
Tropfenentstehung. Dies ist eine weitere Möglichkeit die Parameter zu optimieren.
Bild 2: Tropfen im Stroboskoplicht
2 Theorie
2.1 Einführung in die Optik - Strahlengang
Wie gut sich Einzelheiten an einem Gegenstand erkennen lassen, hängt davon ab, unter
welchem Sehwinkel α 0 sie dem Auge erscheinen.
α0
Bild 3: Definition des Sehwinkels.
Gegenstände werden somit primär dadurch vergrößert, dass man sie näher an das Auge
heranführt. Als minimalen Abstand zwischen Auge und Gegenstand wurde a0 = 25 cm
festgelegt. Unterhalb dieses Abstandes kann das Auge den Gegenstand nicht mehr
entspannt und scharf betrachten. Aus diesem Grund benutzt man für eine weitere
Vergrößerung von Gegenständen optische Instrumente, wie zum Beispiel Lupen oder
Mikroskope. Eine weitere Möglichkeit Gegenstände fürs Auge Vergrößert darzustellen ist ein
Fernrohr. Dabei wird wie beim Mikroskop der Winkel unter dem ein Objekt dem Auge
erscheint vergrößert.
OPT 2
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 7: Mikroskopie
y’’
(virt. Bild)
y
αm
α0
Bild 4: Sehwinkel mit einer Linse.
Die Vergrößerung eines optischen Instruments ist definiert als das Verhältnis
Γ=
tan α m
tan α 0
wobei αm der Sehwinkel mit dem optischen Instrument und α0 der Sehwinkel mit
unbewaffnetem Auge ist.
Optische Instrumente sind aus Linsensystemen aufgebaut. Das Brechungsgesetz erklärt die
Eigenschaften von Linsen:
• Für Sammellinsen (konvex) gilt: Zur Achse parallele Strahlen werden nach der
Brechung im Brennpunkt F vereinigt. Umgekehrt werden Strahlen durch den
Brennpunkt F nach der Brechung achsparallel.
• Für Zerstreuungslinsen (konkav) gilt: Zur Achse parallele Strahlen verlaufen nach der
Brechung so, als ob sie vom Brennpunkt her kämen.
Bei der Abbildung mit einer Zerstreuungslinse entsteht nur ein virtuelles Bild. Eine
Sammellinse dagegen kann reelle und virtuelle Bilder erzeugen. Ein reelles Bild kann auf
einem Bildschirm sichtbar gemacht werden, während ein virtuelles Bild nur durch eine
zusätzliche Linse (z. B. Augenlinse) scharf abgebildet werden kann.
Das virtuelle Bild liegt auf der gleichen Seite der Linse wie der Gegenstand. Das reelle Bild
liegt auf der anderen Seite der Linse.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
OPT 3
Versuch Nr. 7: Mikroskopie
Gegenstand
Linse
Bild
bildseitiger
Brennpunkt
y
f’
f
gegenstandsseitiger
Brennpunkt
a
y’
a’
Bild 5: Abbildung durch eine Linse.
Die Abbildung mit einer dünnen Linse lässt sich nach folgender Formel berechnen:
1 1 1
+ =
a a' f
mit
a … Gegenstandsweite
a’ … Bildweite
f … Brennweite (f = | f | = |f’|)
Der Abbildungsmaßstab β ist das lineare Größenverhältnis zwischen dem Gegenstand und
seinem Bild. Es berechnet sich aus dem Zusammenhang:
β=
a' y'
=
a y
Bei der Abbildung lassen sich fünf einfache Fälle unterscheiden, deren Zusammenhang aus
obiger Formel leicht ersichtlich ist:
• a > 2f: Das Bild, welches die Linse entwirft, ist reell und der Gegenstand erscheint
verkleinert.
• a = 2f: Das Bild des Gegenstandes ist reell und gleich groß wie der Gegenstand
selbst. (|y| = |y’|)
• f < a < 2f:
Das Bild ist reell und der Gegenstand erscheint vergrößert.
• a = f: Das Bild liegt nun im Unendlichen, da die Strahlen vom Brennpunkt ausgehen
und auf der Bildseite der Linse parallel verlaufen. Das menschliche Auge kann ein
solches (virtuelles) Bild sehen. Auf einem Bildschirm ist keine Abbildung möglich.
• a < f: Das Bild ist virtuell und erscheint vergrößert.
OPT 4
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 7: Mikroskopie
2.2 Aufbau eines Mikroskops
Objektiv
Okular
f’Ok
f Ok
f’Ob
y
f Ob
y’
Aperturblende
Feldblende
Bild 6: Schematischer Aufbau eines Mikroskops
Ein einfaches Mikroskop besteht aus zwei Linsen, dem Objektiv und dem Okular. Diese
Linsen werden für den Praktikumsversuch als dünne Linsen betrachtet. Die Besonderheit
des Mikroskops ist, dass vom Objektiv ein Zwischenbild y’ erzeugt wird, das größer ist als
der Gegenstand y. Das Zwischenbild liegt in der gegenstandsseitigen Brennebene des
Okulars und die austretenden Lichtstrahlen sind parallel. Dadurch kann das Bild mit völlig
entspannten, d. h. auf unendliche Entfernung akkomodiertem Auge, betrachtet werden.
Die Aperturblende liegt in der bildseitigen Brennebene des Objektivs. Von der Aperturblende
hängen die Helligkeit der Abbildung, die Schärfentiefe, das Auflösungsvermögen und der
Abbildungsfehler ab.
Die Feldblende liegt in der gegenstandsseitigen Brennebene des Okulars. Die Feldblende
begrenzt die Größe des abzubildenden Feldes.
Für die Vergrößerung des Mikroskops gilt:
ΓM = β Ob ⋅ ΓOk
2.3 Auflösungsvermögen
Die Auflösung wird von der Beugung begrenzt. Jede Linsenfassung ebenso wie jede
Begrenzung der Prismen, Spiegel, usw. stellt eine beugende Öffnung dar. Das hat zur Folge,
dass unabhängig von den sonstigen optischen Eigenschaften, ein Lichtpunkt unscharf
abgebildet wird.
Wenn ebene Wellenfronten auf eine kreisrunde Öffnung treffen, dann überlagern sich die
Elementarwellen, die von der kreisrunden Öffnung ausgehen, je nach Richtung in
unterschiedliche Phasenlagen. Es tritt positive Überlagerung aber auch Auslöschung auf, je
nach Betrachtungsrichtung. Bildet man die Wellenfronten in einer Bildebene ab, so entstehen
um einen hellen Fleck in der Mitte dunkle und helle konzentrische Kreise.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
OPT 5
Versuch Nr. 7: Mikroskopie
Bild 7: Beugungsmuster zweier Punkte, die durch eine Linse abgebildet werden
Von jedem Punkt wird auf dem Schirm ein Beugungsmuster entworfen. Zwei solcher Muster
sind dann noch zu unterscheiden, wenn ihre Maxima mindestens um den Radius R des
ersten Maximums voneinander entfernt sind. Der Winkelabstand der beiden Lichtpunkte P1
und P2 muss mindestens so groß sein, dass das Hauptmaximum des ersten
Beugungsscheibchens beim ersten Minimum des zweiten liegt.
Der Winkel Δα muss nach dem Rayleigh-Kriterium die Mindestgröße Δα = 1,22 λd besitzen,
wenn beide Punkte noch getrennt erkannt werden sollen. Der Kehrwert des minimalen
Winkels Δα heißt Auflösevermögen. Damit der Abstand zweier erkennbarer Punkte klein
genug bleibt, muss man also die begrenzende Öffnung d groß wählen.
Der sichtbare Bereich des Lichts liegt in einem Farbspektrum von 380 nm < λ < 750 nm. Da
im Mikroskop üblicherweise mit Weißlicht (mit einem Bandspektrum) arbeitet, nimmt man
eine mittlere Wellenlänge von 550 nm an.
Betrachtet man ein Objekt durch ein Mikroskop, so liegt der Gegenstand mit der Ausdehnung
y annähernd in der Brennebene des Objektivs, so dass der Winkel Δα =
y
f
gilt (Abstand
Objekt – Objektiv ≈ Brennweite f). Für den Abstand y zweier noch zu trennender Punkte gilt
damit:
y = 1,22
f
λ
d
und für das Auflösevermögen A:
A=
Hierbei ist
d
f
d
1
= 0,82
y
λf
nichts anderes als die Apertur N des Objektivs, so dass man schreibt:
A = 0,82
N
λ
Die numerische Apertur ist festgelegt durch
OPT 6
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 7: Mikroskopie
N = n sin u
wobei n der Brechungsindex des Mediums zwischen Objekt und Objektiv und u der
Aperturwinkel ist. In Luft ist n = 1 .
Das Auflösungsvermögen des Mikroskops ist durch den Abstand zweier noch zu trennender
Punkte definiert. Das Objektiv entwirft in der Brennebene des Okulars ein Bild, das mit dem
Okular betrachtet wird. Das Okular spielt nun für die Beugung keine Rolle, da zwei Punkte,
deren Beugungsmuster sich schon in der Brennebene des Objektivs überlagern, auch nicht
durch das Okular entzerrt werden können.
2.4 Stoboskopische Vermessung periodischer Vorgänge
Die Tropfenerzeugung bei einem Druckkopf ist ein periodischer Vorgang. Eine Analyse der
Vorgänge bei der Tropfenentstehung mit einer Hochgeschwindigkeitskamera würde einen
enormen technischen Aufwand bedeuten: Es müsste eine Kamera mit sehr hoher
Lichtempfindlichkeit eingesetzt werden, damit eine kurze Belichtungszeit verwendet werden
kann, und die zum Teil 20 m/s schnellen Tropfen nicht verschmiert wirken. Zudem wäre noch
eine leistungsfähige Bildverarbeitung notwendig um eine Beobachtung und Vermessung zu
ermöglichen.
Um die Vorgänge trotzdem als Standbild oder verlangsamt bewegt darstellen zu können,
wird im Praktikumsversuch eine stroboskopische Beleuchtung einsetzen. Eine ruckfreie
Bewegung kann hier schon mit 25 Bildern pro Sekunde erreicht werden. Dazu wird das
Geschehen an der Düsenplatte des Druckkopfes stroboskopisch beleuchtet und mit einem
Mikroskop betrachtet. Für ein Standbild wird zwischen dem Impuls, der die Spannung für die
Tropfenerzeugung am Druckkopf liefert, und dem Stoboskopimpuls ein fester Zeitversatz
eingehalten. Da die Tropfen sehr gleichmäßig erzeugt werden, erscheint der Tropfen im
Mikroskop als stehendes Bild. Wird diese Zeitdifferenz verändert, kann man den Tropfen zu
unterschiedlichen Zeitpunkten nach dem Ausstoß aus der Düse, also an unterschiedlichen
Positionen beobachten.
Wird die Zeitdifferenz beider Signale kontinuierlich vergrößert so wirkt der Vorgang für den
Beobachter wie ein Film. Der Tropfen Wandert langsam durch das Bild. Hierbei wird die
Tropfenbildung besonders anschaulich abgebildet. Auf Bild 8 ist eine zeitliche Folge von
Tropfen zu sehen, die mit dem Praktikumsdruckkopf erzeugt wurden.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
OPT 7
Versuch Nr. 7: Mikroskopie
40µs
200µs
60µs
220µs
80µs
240µs
260µs
100µs
120µs
280µs
140µs
300µs
160µs
320µs
180µs
340µs
Bild 8: Tropfenfolge durch stroboskopische Aufnahme mit veränderlicher Phasenlage bei
100-facher Vergrößerung.
Aus der hohen Geschwindigkeit des Tropfens im Vergleich zu der geringe Größe ergibt sich
eine besondere Anforderungen an das Stroboskop: Die Belichtungszeit muss extrem kurz
sein. Fliegt ein Tropfen mit 50 µm Durchmesser mit ca. 10 m/s legt er in der Zeit von 1 µs
bereits 10 µm (20 % seines Durchmessers) zurück. Er würde damit für den Betrachter schon
leicht verschmiert wirken. Deshalb ist eine kurze Belichtungszeit, und ein schnelles
Aufleuchten und erlöschen der Lichtquelle notwendig.
OPT 8
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 7: Mikroskopie
Bei einer Belichtungszeit von 1 µs und einer Druckfrequenz von ca. 1 kHz würden pro
Sekunde 1000 Lichtblitze mit einer Dauer von 1 µs die Szene beleuchten. Daraus ergibt sich
ein Verhältnis von Helligkeit zur Dunkelheit von 1/1000. Die Lampe muss also sehr lichtstark
sein, damit der Tropfen ausreichend hell erscheint. Im Praktikumsversuch wird der Tropfen
mit einer Frequenz von 1 kHz erzeugt und mit einer Geschwindigkeit von etwa 1 m/s
ausgestoßen.
3 Ausprägung im Versuch
Der Versuch im Praktikum gliedert sich in zwei Teilversuche. Zuerst werden die wichtigsten
Methoden gezeigt, um Mikrostrukturen quantitativ zu vermessen. Der zweite Versuchsaufbau
dient der Vermessung von Wachstropfen mit stoboskopischer Beleuchtung.
3.1 Statische Vermessung von Bauteilen
Mikroskop
Fokuslage
Wegmessuhr
x-y-Tisch
Objekt
Grundplatte
Bild 9: Versuchsaufbau für die Strukturvermessung
Das Mikroskop befindet sich über einem Objekt, das untersucht werden soll. Um den Fokus
auf das Objekt richtig einzustellen, kann das Mikroskop in vertikaler Richtung verstellt
werden.
Zur Vermessung des horizontalen Abstands zweier Punkte auf dem Objekt wird eine
Wegmessuhr angebracht. Betrachtet man einen Punkt auf dem Objekt und verfährt den
x-y-Tisch zum Betrachten eines anderen Punktes, so zeigt die Wegmessuhr den Abstand in
einer Achse an. Für das exakte Vermessen des Abstandes ist es somit erforderlich, den
Winkel des Objekts entsprechend zur Achse einzurichten. Dazu wird die Lage ebenfalls mit
dem Mikroskop kontrolliert. Die zu messende Strecke wird mit dem Tisch abgefahren. Wenn
das Fadenkreuz beide Messpunkte anvisieren kann, ohne dass die zweite Achse bewegt
werden muss, liegt das Messobjekt richtig.
Um die Messpunkte genau erfassen zu können, wird bei dieser Messung auf die größte
Vergrößerung am Objekt gestellt.
Zur Vermessung des vertikalen Abstands zweier Punkte wird mit einer Wegmessuhr das
Mikroskop in vertikaler Richtung angetastet. Der Fokus wird auf Höhe des ersten Punkts
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
OPT 9
Versuch Nr. 7: Mikroskopie
scharf eingestellt und die Messuhr auf Null gesetzt. Anschließend wird der Fokus auf Höhe
des zweiten Punkts scharf gestellt. Die Messuhr zeigt den vertikalen Abstand der beiden
Punkte. Auch bei dieser Messung sollte mit der größten Vergrößerung gearbeitet werden.
Die Schärfentiefe nimmt dadurch stark ab. Die Blende wird so weit wie möglich geöffnet, um
die Schärfentiefe der Abbildung nochmals zu minimieren.
Beachte: Messuhren verfügen meistens über ein deutliches Umkehrspiel. Man sollte deshalb
bei jeder Messung immer nur in einer Richtung, d. h. ohne Richtungsumkehr, messen!
3.2 Tropfenbeobachtungsstand
x,y- Tisch
y
Druckkopf
Mikroskop
z
x
Tropfen
Stroboskop
Optische Achse
Bild 10: Tropfenbeobachtungsstand
Das Mikroskop wird nun zur Beobachtung von Tropfen verwendet. Um den Fokus auf die
Tropfen richtig einzustellen, kann das Mikroskop in Blickrichtung verstellt werden. Die
Tropfen werden von einem Druckkopf senkrecht in einen Auffangbehälter ausgestoßen. Der
Druckkopf kann in der Bildebene bewegt werden. Die Tropfen werden mit einem Stroboskop
von hinten synchron zur Ausstoßfrequenz belichtet. Dadurch erscheint im Mikroskop ein
stehender Tropfen, der durch einen einstellbaren Zeitversatz (Verzögerung zwischen
OPT 10
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 7: Mikroskopie
Tropfenausstoß und Belichtung), in unterschiedlicher Entfernung vom Druckkopf betrachtet
werden kann. Dies ermöglicht eine qualitative Beurteilung der Tropfenentstehung und des
Tropfens. Mit dem x-y-Tisch kann der unter dem Mikroskop anvisierte Tropfen scheinbar im
Bild verschoben werden. Dieses Vorgehen ermöglicht quantitative Messungen.
4 Hausaufgaben
1. Zeichnen Sie die Strahlengänge zu den 5 in 2.1 genannten Fällen! (Gegeben:
Gegenstandsgröße y = 2 cm, Brennweite f = 1,5 cm) Zeichnen Sie auch das virtuelle Bild für
a < f ein!
2. Zur Vermessung von Objekten soll an geeigneter Stelle eine Platte mit Skala eingebaut
werden. Welche Stelle eignet sich besonders zum Einbau der Skala? Welche Auswirkungen
hat die Verkleinerung der Aperturblende auf die Helligkeit und Schärfentiefe? Betrachten Sie
dazu den Gegenstand als einen diffusen Strahler. Begründen Sie Ihre Aussage anhand des
Strahlengangs von Objekten, die axial verschoben liegen.
3. Wie groß ist der kleinste, auflösbare Punktabstand für stärkste Objektive (numerische
Apertur N = 1,4)?
Gehen Sie davon aus, dass die Abbildung auf einem Schirm erfolgt und ein Abstand
benachbarter Punkte größer als 1 mm nicht sinnvoll ist. Wie groß ist in diesem Fall die
erreichbare Vergrößerung?
4. Das Mikroskop des Praktikums hat eine numerische Apertur von 0,44. Welchen
Punktabstand können Sie bestenfalls noch unterscheiden?
Wie muss die Farbe (Wellenlänge) der Beleuchtung
Auflösevermögen zu steigern?
gewählt
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
werden,
um
das
OPT 11
Versuch Nr. 7: Mikroskopie
5 Praktikumsaufgaben:
1 Bauteilvermessung
a)
Betrachten Sie unterschiedliche Objekte mit unterschiedlichen Vergrößerungen am
Mikroskop. Skizzieren Sie je Person ein Objekt ihrer Wahl und tragen Sie eine
Maßlinie ein.
b)
Skizzieren Sie eine Pumpenkammer des Druckkopfes. Stellen Sie in einer
Schrägansicht den Übergang von der Pumpenkammer zum Düsenkanal so dar, dass
Sie für die Tiefe t und die Breite b des Düsenkanals eine Bemaßung eintragen
können.
c)
Erstellen Sie für die beiden folgenden Teilaufgaben jeweils eine Tabelle mit
Spaltenbeschriftung und Nummerierung der Messwerte. Benötigt werden sechs
Spalten für die unterschiedlichen Messungen mit Auswertungen und zehn
Messwerten untereinander!
d)
Vermessen Sie die Tiefe des Düsenkanals am Übergang zur Pumpenkammer unter
Verwendung eines Mikrometertasters bei unterschiedlichen Vergrößerungen.
Ermitteln Sie jeweils 10 Messwerte für die Tiefe unter Verwendung des Objektivs mit
10-facher und 50-facher Vergrößerung. Notieren Sie die möglichen Fehlerquellen
stichpunktartig.
e)
Vermessen Sie die Breite des Düsenkanals unter Verwendung eines
Mikrometertasters bei unterschiedlichen Vergrößerungen. Ermitteln Sie jeweils 10
Messwerte für die Breite des Düsenkanals unter Verwendung des Objektivs mit
5-facher und 50-facher Vergrößerung. Notieren Sie die möglichen Fehlerquellen
stichpunktartig.
f)
Ermitteln Sie für die Messreihen der beiden vorhergehenden Teilaufgaben den
Mittelwert und die Standardabweichung. Interpretieren Sie das Ergebnis.
Hinweis zur Berechnung des Mittelwertes und der Standardabweichung:
g)
Ermitteln Sie eine Formel zur Berechnung der wahren Größe von y aus dem
abgelesenen Skalenwert im Okular. Verwenden Sie hierzu die zuvor ermittelte Breite
des Düsenkanals. Runden Sie ihr Ergebnis sinnvoll.
OPT 12
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 7: Mikroskopie
2 Tropfenbeobachtung
a)
Bringen Sie den stehenden Tropfen in das Gesichtsfeld des Mikroskops. Sorgen Sie
dafür, dass das Gesichtsfeld gut ausgeleuchtet ist. Stellen Sie die Impulsbreite für die
Tropfenerzeugung am Verstärker so ein, dass sie ein ähnliches Tropfenbild wie in
Bild 8 erhalten.
b)
Vermessen Sie den größten Einzeltropfen im Bild. Geben Sie sein Volumen in Litern
an. Ermitteln sie das Gewicht des Tropfens (Dichte 0,9 g/cm³).
c)
Ermitteln Sie die Geschwindigkeit des größten Tropfens, indem Sie den Tropfen zu
zwei unterschiedlichen Zeitpunkten nach dem Ausstoß betrachten und den Abstand
zwischen den zwei unterschiedlichen Positionen dieses Tropfens messen. Die zwei
unterschiedlichen
Zeitpunkte
können
entweder
durch
Einstellen
einer
unterschiedlichen Verzögerung (delay) zwischen Tropfenausstoß und Beleuchtung,
wie in Bild 8 gezeigt, eingestellt werden oder bei beibehalten der Verzögerung durch
die Beleuchtungsfrequenz festgelegt sein.
d)
Ermitteln Sie die kinetische Energie des Tropfens!
e)
Skizzieren Sie den Tropfen mit seinem Schweif und den Satelliten. Überlegen Sie
sich was für ein Bild bei hoher Verfahrgeschwindigkeit des Drucktisches erfolgen
würde?
f)
Vermessen Sie die Länge des Tropfenstrahls, kurz nachdem der Tropfen die Düse
vollständig verlassen hat! Welche Länge würde er auf einem mit 1 m/s bewegten
Tisch mit Wachs benetzen?
6 Literatur
•
•
•
•
Schröder, „Technische Optik – Grundlagen und Anwendungen“, 9., veränd. u. erw.
Aufl, Vogel, Juli 2002
Czichos, „Hütte – Die Grundlagen der Ingenieurwissenschaften“, 31. Auflage,
Springer, 2002
Muth, „Ausgewählte Grundlagen des Feingerätebaus“, 1. Auflage, TU München, 2002
Heinzl, „Feingerätebau“, TU München, 2001
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
OPT 13
Versuch Nr. 8: AD Wandler
Beschreibung zu Versuch Nr. 8:
Analog-Digital-Wandlung
Daniel Günther, überarbeitet von Christian Richter
1. Einordnung
Die Verwendung von Computern in der Regelungs- und Messtechnik ermöglicht neue Methoden der Signalverarbeitung und -analyse. Beispielweise könnte die Regelung der Temperatur unseres Drucksystems auch durch eine Digitalregelung realisiert werden. Es würde sich
dadurch beispielweise die Möglichkeit ergeben, mit vom Rechner vorgegebenen Viskositäten
zu drucken. Dies könnte neue Möglichkeiten bzgl. der Formfreiheit des Ausdrucks mit sich
bringen.
Digitale Systeme erweisen sich durch Preisgünstigkeit, Genauigkeit und leichte Implementierbarkeit (Entwicklung und Anpassung nur durch Veränderung der Software) als universell
einsetzbar.
Der Einsatz digitaler Rechneranlagen bringt zahlreiche Vorteile mit sich. Besonders hervorzuheben ist hierbei, dass sie die Weiterverarbeitung und Speicherung von Messdaten erheblich vereinfachen. Zur Speicherung von Daten, in diesem Fall Messwerten, stehen verschiedene Prinzipien zur Verfügung. RAM, Diskette bzw. Festplatte beispielsweise können jederzeit neu beschrieben werden. Gerade im Prüffeld werden zunehmend auch Flash-Speicher
in Form von Speicherkarten oder USB-Sticks eingesetzt, die einen unkomplizierten „Transport" der Daten von Messwertaufnehmern (z. B. Speicheroszilloskop) zu einem weiterverarbeitenden Rechner erlauben. Besonders in der Steuerungstechnik bieten digitale Systeme
den Vorteil, dass Parameter mit hoher und dauerhafter Genauigkeit eingestellt werden können. Korrelationsmesstechnik, digitale Filter und diskrete Fourieranalyse sind Beispiele dafür, welche Analysemöglichkeiten man sich mit dem Einsatz digitaler Systeme erschließt.
Um jedoch zeit- und wertkontinuierliche physikalische Größen, wie Druck, Beschleunigung
oder Temperatur, digital verarbeiten zu können, müssen diese zunächst von Sensoren in
elektrische Signale gewandelt und dann mit Hilfe von Analog-Digital-Wandlern in einzelne
diskrete Werte umgesetzt werden.
In einem zeitdiskreten System ist der kontinuierliche Verlauf eines der physikalischen Größe
entsprechenden Signals durch einen Wert innerhalb eines Intervalls von der Länge des
Stützstellenabstandes (Abtastintervall) vollständig beschrieben. Die Darstellung eines Wertes in einem digitalen System erfolgt mit endlicher Stellenzahl, im Allgemeinen binär codiert.
Problematisch ist allerdings, dass nur zu leicht den digitalen Messergebnissen zu viel Glauben geschenkt wird. In diesem Praktikumsversuch sollen deshalb die Voraussetzungen für
einen sinnvollen Einsatz von Datenwandlern aufgezeigt werden.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
AD 1
Versuch Nr. 8: AD Wandler
2. Theorie
Komponenten eines Datenerfassungssystems
Ein Sensor erfasst die physikalische Größe und liefert ein elektrisches Signal, das von einem
Verstärker aufbereitet und anschließend zur Unterdrückung hochfrequenter Anteile einem
aktiven Tiefpassfilter (Anti-Aliasing-Filter, s. u.) zugeführt wird. Das vom Abtast- und Halteglied (engl. sample and hold, S&H) abgetastete und gehaltene Signal kann sodann durch
den A/D-Wandler in digitale Form umgesetzt werden. Die so entstandenen digitalen Werte
werden auf den Datenbus geführt und stehen so dem digitalen System zur Weiterverarbeitung zur Verfügung.
Bild 1: Komponenten zur digitalen Erfassung analoger Größen
Umgekehrt wird jedes digitale Wort durch einen D/A-Wandler in einen entsprechenden Analogwert umgesetzt. Die analoge Ausgangsspannung wird durch einen Tiefpassfilter geglättet
und dann verstärkt. Von digitaler Seite kann auf die Umgebung Einfluss genommen werden,
wenn das Ausgangssignal beispielsweise durch einen Lautsprecher, einen Motor oder ein
Piezoelement in eine physikalische Größe umgeformt wird.
Bild 2: Komponenten zur analogen Ausgabe digitaler Daten
Tabelle 1 zeigt die verschiedenen Analogspannungen, die im Wandlungsprozess bei idealen
Bedingungen auftreten:
a) Das ursprüngliche, zu digitalisierende Signal;
b) Die äquidistanten Abtastimpulse, die dem S&H-Glied den Zeitpunkt der Abtastung angeben;
c) Das Signal nach dem S&H-Glied;
d) Das durch Rückwandlung und Glättung rekonstruierte Signal.
AD 2
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 8: AD Wandler
a) Signal
b) Äquidistante Abtastimpulse
c) Abgetastetes und gehaltenes Signal
d) Rekonstruiertes Signal
Tabelle 1: Analoge Spannungen im Wandlungsprozess
Quantisierung
Der gesamte Aussteuerungsbereich wird bei der Diskretisierung in n Quantisierungsstufen
unterteilt. Zur Kodierung von n Stufen sind N = Id(n) (N ganzzahlig) Binärstellen notwendig.
Das niederwertigste Bit (meist Bit 0) wird, entsprechend der englischen Übersetzung "least
significant bit", als „LSB" bezeichnet.
Der Spannungsunterschied zwischen zwei Stufen ULSB errechnet sich aus Aussteuerungsbereich Umax (FSR: full scale range) und Quantisierungsstufenzahl n bzw. Binärstellenzahl N
wie folgt:
U LSB =
U MAX U MAX FSR
= N = N
n
2
2
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
AD 3
Versuch Nr. 8: AD Wandler
Bild 3: Der Quantisierungsfehler als Differenz zwischen Ausgangs- und Eingangssignal eines
idealen Wandlungssystems
Tabelle 1 veranschaulicht den Zusammenhang zwischen Ausgangs- und Eingangssignal
eines Datenwandlungssystems. Mit rampenförmigen Eingangssignalen lässt sich auf die
dargestellte Weise der Quantisierungsfehler eines realen Wandlungssystems messtechnisch
erfassen. Die sägezahnförmige Differenzspannung ist eine Folge der gestuften Übertragungskennlinie (s. Bild 3).
Die Differenz zwischen Ausgangs- und Eingangssignal bei einem beliebigen Eingangssignal
ist ein statistisches Signal, der Quantisierungsfehler wird deshalb auch als Quantisierungsrauschen bezeichnet. Der Effektivwert UReff dieses Rauschsignals errechnet sich aus:
U Re ff =
U LSB
.
12
Um ein nichtlineares System zu beurteilen, wird in der Nachrichtentechnik oft der SignalRausch-Abstand (signal-to-noise-ratio) herangezogen [DAT].
Bei einem idealen AD-Umsetzer mit 12 Bit Auflösung beträgt er
SNR = 20 dB ⋅ log
U Seff
U Re ff
= 1,8 dB + N ⋅ 6 dB ≈ N ⋅ 6 dB = 72 dB
wobei USeff der Effektivwert eines Sinus-Signals bei Ausnutzung des vollen Aussteuerungsbereichs ist:
U Seff =
1
2 2
⋅ 2 N ⋅ U LSB
Die Übertragung eines Signals durch ein digitales System verursacht also, bedingt durch die
Quantisierung, einen Fehler, der durch Erhöhen der Bitzahl verringert, jedoch nicht vermieden werden kann.
AD 4
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 8: AD Wandler
Codierung
Bild 4 zeigt die Übertragungskennlinie eines idealen A/D-Wandlers. Einem Intervall der Breite ULSB wird ein Binärcode zugeordnet.
Für Datenwandler sind verschiedene Arten der Codierung verbreitet, die entsprechend der
Applikation ausgewählt werden. Nachstehende Tabelle beschreibt die gängigsten Codierungsarten für Unipolar- und Bipolarbetrieb.
Bild 4: Übertragungskennlinie eines idealen A/D-Wandlers
Tabelle 2: Codierungsarten für Unipolar- und Bipolarbetrieb
Unipolar
Bipolar
2er-
Offset-Binär Vorz. + Be-
Komplement
trag
FS-1LSB
111...111
+FS-1LSB
011...111
111...111
011...111
FS-2LSB
111...110
+FS-2LSB
011...110
111...110
011...110
+1LSB
000...001
100...001
000...001
0
000...000
100...000
(1/0)00...00
0
-1LSB
111...111
011...111
100...001
1LSB
000...001
-FS+1LSB
100...001
000...001
111...110
0
000...000
-FS
100...000
000...000
111...111
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
AD 5
Versuch Nr. 8: AD Wandler
Auflösung und Genauigkeit
Ein realer A/D-Wandler liefert zwar die angegebene Anzahl an Binärstellen, die Frage ist
jedoch, ob auch die niederwertigsten Bits (LSBs) korrekt sind. Einfluss darauf haben sowohl
statische als auch dynamische Fehler, von denen hier einige betrachtet werden sollen.
Nach der Darstellung der Übertragungskennlinie eines idealen A/D-Wandlers gemäß Bild 4
ergibt die Verbindung der Stufenmitten eine Winkelhalbierende. Bei unterschiedlicher Breite
der Quantisierungsstufen ist diese Verbindung keine Gerade, hier spricht man deshalb von
einem Nichtlinearitätsfehler oder von differentieller Nichtlinearität (DNL) [SS].
Eine Verschiebung der Kennlinie nach oben oder unten wird als Offsetfehler bezeichnet.
Dieser Fehler kann durch Kalibrierung beseitigt werden. Genauso kann eine verfälschte
„Steilheit" der Übertragungskennlinie (Verstärkungsfehler) durch entsprechende Skalierung
korrigiert werden. Offset und Skalierung werden üblicherweise am Wandler und im Verstärkungsteil durch Abgleich eingestellt, können aber auch auf der Digitalseite berücksichtigt
werden.
Verringert sich bei Erhöhung der Eingangsspannung der Wert des Binärcodes oder umgekehrt, so ist das monotone Verhalten der Kennlinie und somit die eindeutige Zuordnung von
Eingangs- und Ausgangswert nicht mehr möglich. Monotoniefehler lassen daher ein Wandlungssystem praktisch unbrauchbar werden.
Für die Wahl der Auflösung ist entscheidend, mit welcher Genauigkeit die physikalische
Größe gemessen werden kann. Eine höhere Auflösung des A/D-Wandlers kann die Messgenauigkeit nicht erhöhen, sondern verleitet dazu, dem digitalisierten Wert zuviel Glauben zu
schenken.
Die relative Genauigkeit eines als ideal angenommenen A/D-Wandlers beträgt
r=
1
2N
Kann eine physikalische Größe auf 1 % genau gemessen werden, ist ein 7-Bit-Wandler vollkommen ausreichend. Da die relative Genauigkeit des Wandlers mit 1/(27) = 0,024 % größer
ist als die der Messgröße, „wackelt" das niederwertigste Bit, nur die oberen 6 Bit liefern zuverlässige Ergebnisse.
Abtastung
Zunächst sollen der Vorgang des Abtastens und die daraus resultierenden Probleme an einem physikalischen Analogon veranschaulicht werden.
Betrachtet man ein schwingendes Pendel, so ist zu jedem Zeitpunkt die momentane Auslenkung erkennbar. Die Pendelbewegung soll nun aber nicht mehr kontinuierlich belichtet, sondern mit einem Stroboskop-Blitz „abgetastet" werden. Es ist einleuchtend, dass durch diese
AD 6
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 8: AD Wandler
Abtastung Information verloren geht. Bei ausreichend hoher Blitzfrequenz lässt sich diese
Information wiedergewinnen, indem man zwischen den Positionspunkten interpoliert (das
menschliche Sehsystem Auge/Sehzentrum macht dies aufgrund seiner eingeschränkten zeitlichen Auflösung: bei einer Blitzfrequenz ab ca. 50 Hz erscheint uns die Bewegung kontinuierlich).
Bei dieser Interpolation ist jedoch nicht sichergestellt, ob genügend oft belichtet wurde. Man
weiß nicht, ob das Pendel zwischen den Belichtungspositionen nicht ein- oder mehrmals
gewendet hat. Bild 5 beschreibt graphisch die Rekonstruktion einer unterabgetasteten Pendelschwingung.
Welche Beziehung bei der Abtastung von Signalen im Allgemeinen gelten müssen, um Unterabtastung zu vermeiden, wird im Folgenden behandelt.
Aliasing/Abtasttheorem
Will man das ursprüngliche Signal aus dem abgetasteten Signal rekonstruieren, so ist die
Erfüllung des Abtasttheorems
fS ≤
1
⋅ f abt
2
notwendig, d. h. die Frequenz der periodischen Schwingung darf maximal die Hälfte der Abtastfrequenz betragen bzw. in jeder Periode der Schwingung müssen mindestens zwei
Messwerte vorliegen. Ist diese Bedingung verletzt, kommt es zum AIiasing-Effekt. Die abgetasteten Werte entsprechen bei der Rekonstruktion einer Schwingung mit niederer Frequenz,
man erhält also ein Signal, das nicht mit dem ursprünglichen Signal übereinstimmt.
Bild 5: Aliasing durch zu hohe Eingangs- bzw. zu niedrige Abtastfrequenz
Aliasing kann in manchen Bereichen auch beabsichtigt sein. Will man einen schnellen, periodischen Vorgang sichtbar machen, bedient man sich eines Stroboskopblitzes. Bei geeigneter Wahl der Blitzfrequenz (= „Abtastfrequenz") erscheint der Vorgang deutlich langsamer.
Dieses Vorgehen wird hier im Praktikum beim Versuch Mikroskop gewählt. Hier werden beispielweise die Tropfen eines Druckkopfes als Standbild dargestellt (Extremfall!).
Bei der Fernsehübertragung wird nicht nur zeitlich, sondern auch zweidimensional örtlich
abgetastet, wodurch Aliasing auftreten kann. So erscheint beispielsweise bei der Übertragung eines feinen Nadelstreifenanzugs ein Flimmern am Bildschirm, also (örtliche) Aliasfrequenzen, die im ursprünglichen Bildsignal (dem realen Anzug) nicht enthalten waren.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
AD 7
Versuch Nr. 8: AD Wandler
Anti-AIiasing-FiIter
Bei der bisherigen Betrachtung haben wir uns auf sinusförmige Signale beschränkt. Dies ist
zulässig und vorteilhaft, da ein beliebig geformtes analoges Signal nach der Idee der FourierAnalyse als die Summe (Superposition) einzelner Sinusschwingungen mit verschiedener
Amplitude und Frequenz/Phase aufgefasst werden kann. Man muss also bei einem beliebig
geformten Signal Frequenzen berücksichtigen, die weit oberhalb der Grundschwingung liegen.
Bei einem realen, messtechnisch erhaltenen Signal sind immer hochfrequente Anteile vorhanden, wenn auch ihre Amplituden gegenüber der des Nutzsignals meist relativ gering sind.
Die Frequenzanteile, die über der halben Abtastfrequenz liegen, werden nach der Abtastung
als Signalanteile niederer Frequenz fehlinterpretiert.
Um dieses AIiasing und den daraus resultierenden Messfehler zu unterbinden, müssen alle
Frequenzen über der halben Abtastfrequenz ausgefiltert werden. Dazu ist ein Tiefpass notwendig (Anti-Aliasing-Filter).
Bild 6: Übertragungsfunktion eines idealen und eines realen Tiefpassfilters
Im Idealfall soll ein solcher Tiefpass die niedrigen Frequenzanteile ungehindert passieren
lassen und alles über der halben Abtastfrequenz herausfiltern. Ein idealer Tiefpass (Küpfmüller-TP) ist jedoch nicht zu realisieren. Ein realer Tiefpass dämpft zum einen auch Frequenzen im Durchlassbereich, zum anderen unterdrückt er unerwünschte Anteile nicht vollständig
(Bild 6). Die Auswirkung des Aliasing lässt sich mit einem realen TP zwar vermindern, aber
nicht völlig ausschalten.
Mit steigender Ordnung des Filters nähert sich seine Filtercharakteristik der des idealen Tiefpasses, jedoch machen sich dann auch negative Eigenschaften (Überschwingen, Phasenverschiebung, Gruppenlaufzeit) bemerkbar, wodurch sich wieder neue Verfälschungen ergeben können. Außerdem vergrößert sich der Aufwand des Filteraufbaus erheblich. Deshalb ist
es notwendig, immer im Hinblick auf die spezifische Anwendung Abtastfrequenz und Filter-
AD 8
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 8: AD Wandler
auswahl aufeinander abzustimmen und die Messergebnisse käuflicher A/D-Wandler-Karten
kritisch zu betrachten.
Sample-and-Hold-Verstärker
Die Bandbreite des Wandlungssystems wird durch die Tatsache beschränkt, dass sich das
Eingangssignal während des Umsetzungsvorgangs nur innerhalb bestimmter Grenzen ändern darf, um die Ungenauigkeit innerhalb des Auflösungsvermögens zu belassen. Dieses
Problem kann man umgehen, indem man einen S&H-Verstärker als analogen Informationsspeicher einsetzt. Der S&H-Schaltkreis übernimmt die Abtastung des Signals und speichert
den Wert für die Dauer einer Abtastperiode.
Bild 8 zeigt das Prinzipschaltbild eines gebräuchlichen S&H-Schaltkreises. Ist der Schalter S
geschlossen, liegt am Kondensator C die Eingangsspannung an. Zum Abtastzeitpunkt öffnet
die Samplesteuerung den Schalter, der Spannungswert bleibt am Kondensator erhalten und
steht somit am Ausgang weiterhin zur Verfügung. Nach Beendigung der Wandlung kann der
Schalter wieder geschlossen werden, um den nächsten Spannungswert aufzunehmen.
Bild 7: Prinzipschaltbild eines gebräuchlichen S&H- Schaltkreises
Multiplexing
Um mehrere Analog-Kanäle an ein digitales System anzukoppeln, gibt es prinzipiell zwei
Möglichkeiten:
Bild 8: Anschluss mehrerer Kanäle durch Analog- Multiplexing
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
AD 9
Versuch Nr. 8: AD Wandler
1) An einen AD- Wandler werden mehrere Analog-Kanäle angeschlossen. Dabei wählt der
µ-Prozessor über adresscodierte Analogschalter jeweils einen Kanal aus. Zu einem bestimmten Zeitpunkt kann also nur einer der Analog-Kanäle abgetastet werden.
Vorteil: Niedrige Kosten durch Verwendung von lediglich einem ADC. Es gibt fertig integrierte Multiplexing-ADCs, die alle benötigten Baugruppen enthalten und zusätzlich zu den
Anschlüssen des ADCs die Adressleitungen zum Auswahl des Kanals herausgeführt haben.
Nachteil: Messung mehrerer Größen ist bei dieser Art des Multiplexings nur für langsame
Vorgänge geeignet. Ein Beispiel dafür wäre eine Raumtemperaturmessung an verschiedenen Stellen.
Müssen die Werte aller Kanäle zum gleichen Zeitpunkt (synchron) gemessen werden, so
wird für jeden Kanal eine separate S&H-Stufe benötigt. Alle Schalter werden zum Abtastzeitpunkt geöffnet, die Spannungen an den Kapazitäten werden dann nacheinander über
den Multiplexschalter an den A/D-Wandler geführt.
2) Für jeden Kanal steht ein A/D-Wandler zur Verfügung. Die digitalisierten Werte der einzelnen Kanäle werden zwischengespeichert (D-Latch, RAM) und anschließend vom µProzessor nacheinander ausgelesen.
Bild 9: Parallele Erfassung mehrerer Kanäle durch digitales Multiplexing
Nachteil: Sehr kostenintensiv, da für jeden Kanal ein Wandler benötigt wird. Vorteil: Die
Analog-Kanäle können gleichzeitig erfasst werden, wobei die volle Geschwindigkeit der
Wandler erhalten bleibt, was insbesondere bei schnellen Prozessen von Bedeutung ist.
AD 10
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 8: AD Wandler
Außerdem bietet sich die Möglichkeit, die Wandler direkt an den Messplätzen zu platzieren, wodurch Störeinflüsse, die sich auf das Analog-Signal stärker auswirken als auf das
digitalisierte Signal, vermieden werden. Auf dem Markt gibt es bereits eine Reihe von
A/D-Wandlern mit sehr geringen Ausmaßen (8-pol. SMD-Gehäuse) und serieller Übertragung der Digitalwerte.
3 Ausprägung im Versuch
Beschreibung des Hardware-Aufbaus
Als A/D-Wandler findet der Baustein ADS574 von Burr-Brown Verwendung. Dieser Wandler
hat eine integrierte Sample-&-Hold-Stufe und besitzt eine Auflösung von 12 Bit. Im Versuch
wird er im Bipolar-Modus betrieben. Die zwölf Ausgangs-Datenleitungen sind „Offset-Binär"
codiert.
Der Aufbau der Versuchsschaltung ist auf zwei Platinen im Europa-Format aufgeteilt.
1) AD-Wandler-Karte
Zur Pufferung des Eingangssignals dient ein Operationsverstärker, der als Spannungsfolger
mit Verstärkungsfaktor 1 beschaltet ist. Die Amplitude kann am Potentiometer P reduziert
werden. Das so aufbereitete Signal wird zwei Tiefpassfiltern zugeführt.
Über einen Umschalter kann man nun auswählen, ob das Signal mit einem Tiefpass zweiter
Ordnung, einem Tiefpass vierter Ordnung oder ungefiltert an den Eingang des A/DUmsetzers gelangt.
Analog In
P
LF350
+
-
Bild 10: Der Eingangsverstärker
Der Tiefpass vierter Ordnung ist aus zwei hintereinandergeschalteten Tiefpassfiltern zweiter
Ordnung aufgebaut. Die Grenzfrequenz dieser aktiven Filter wird bestimmt durch die Werte
der Widerstände und Kondensatoren, welche anhand der Koeffizienten, die entsprechend
der gewünschten Filtercharakteristik einer Filtertabelle ([TS]) zu entnehmen sind, dimensioniert werden. Im Versuch werden Butterworth-Filter zweiter bzw. vierter Ordnung verwendet.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
AD 11
Versuch Nr. 8: AD Wandler
Bild 11: Tiefpass 2. Ordnung
Die A/D-Umsetzung wird durch die steigende Flanke des vom Taktgenerator gelieferten
Clock-Signals gestartet. Die Beendigung des Wandlungsvorgangs und die Gültigkeit der Daten am Digitalausgang zeigt der A/D-Umsetzer mit dem Signal READY an. Mit der steigenden Flanke dieses Signals wird das Datenwort in die Daten-Register IC2I/C3 übernommen.
Durch die Zwischenspeicherung der Daten erreicht man, dass das Datenwort am Ausgang
immer gültig ist. Mit Hilfe des Schalter JP1 werden die niederwertigen vier Bits zum Vergleich
verschiedener Auflösungen ausgeblendet.
Bild 12: Taktgenerator
Zusätzlich steuern die Datenpuffer zwölf Leuchtdioden an, an denen man im Versuch das
Datenwort ablesen kann. Am 40-poligen Pfostenstecker ST1 schließlich wird das Datenwort
an die D/A-Wandler-Karte weitergegeben.
Bild 13: Der A/D-Umsetzer ADS574 mit externer Beschaltung und paralleler Schnittstelle
AD 12
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 8: AD Wandler
Weiter sei noch auf die getrennte analoge und digitale Spannungsversorgung hingewiesen.
Digitale Schaltungen mit hohen Taktfrequenzen „verunreinigen“ die Versorgungsspannungen, außerdem ist eine getrennte Masseführung aus elektrischer Sicht notwendig. Die analoge Masse AGND und die digitale Masse werden so nahe wie möglich am A/D-Umsetzer
zusammengeführt. Gerade bei höheren Taktfrequenzen sind diese elektrischen Maßnahmen
notwendig, um die im Datenblatt des A/D-Umsetzers zugesicherten Werte bei der Realisierung erreichen zu können.
2) D/A-Wandler-Karte
Über die Steckerleiste ST1 werden die Versorgungsspannungen und die Datenleitungen
D0.D11 eingespeist. Beide letztgenannten werden nicht benötigt, da der D/A-Wandler
DAC 813 bei dieser Methode der Beschaltung stetig das anliegende Datenwort in den äquivalenten Analogwert Vout umsetzt und auf keinen Startimpuls wartet.
Bild 14: Der DA-Umsetzer mit externer Beschaltung
Über den Schalter SW1 kann man auswählen, ob das Analogsignal Vout nur verstärkt oder
zusätzlich mit einem Butterworth-Filter 4. Ordnung geglättet wird. Die Ausgangsspannung ist
über eine BNC-Buchse herausgeführt.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
AD 13
Versuch Nr. 8: AD Wandler
Bild 15: Das Ausgangssignal lässt sich wahlweise mit einem Tiefpass 4. Ordnung
(Grenzfrequenz 20 kHz) glätten
AD 14
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 8: AD Wandler
4 Hausaufgaben
1. a) Wie groß ist die Auflösung ULSB eines 4-Bit-A/D-Wandlers im Bipolarbetrieb, wenn er
auf eine maximale positive Spannung von Umax = +FSR = +5 V ausgelegt ist?
b) Bestimmen Sie für „Binär-Offset"- Codierung alle binär-codierten Werte (N=4) und ihre entsprechenden Analogwerte.
2. Der im Praktikum verwendete 12-bit-A/D-Wandler ADS574 ist auf einen Aussteuerungsbereich von: +-5 V eingestellt. Berechnen Sie ULSB und vervollständigen Sie die Codierungstabelle.
Binär-Offset
1111 1111 1111
1000 0000 0000
0111 1111 1111
Analogwert
Binär-Offset
0010 1000 0001
0000 0000 0001
0000 0000 0000
Analogwert
3. Ein A/D-Wandler arbeitet mit einer Auflösung von 12 Bit und einer Taktfrequenz von
1 kHz, jedoch ohne S&H-Baustein. Wie hoch darf die Frequenz eines voll ausgesteuerten
Sinussignals maximal sein, wenn der Fehler bei der Wandlung unter 1 LSB bleiben soll?
4. Ein Audio-Signal besitzt eine Bandbreite von ca. 20 kHz. Berechnen sie die minimale
Abtastrate.
5. Ein A/D-Wandler benötigt zur vollständigen Wandlung 100 µs. Mit diesem Wandler sollen
nacheinander sechs Kanäle erfasst werden. Die Übertragung jedes Messwerts dauert
5 µs. Wie hoch ist die maximal erreichbare Abtastrate pro Kanal?
6. Über ein Thermoelement und einen nachgeschalteten Messverstärker lässt sich die Temperatur zwischen 20°C und 70°C auf 0,2 K genau messen. Welchen A/D-Wandler wählen
Sie aus? Was ist über den Informationsgehalt des niederwertigsten Bits zu sagen?
7. Welche Verbesserung erreicht man mit dem Einsatz eines Wandlers, dessen Auflösung
besser ist als die absolute Messgenauigkeit?
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
AD 15
Versuch Nr. 8: AD Wandler
5 Praktikumsaufgaben
Das Eingangssignal der A/D-Karte wird von einem Funktionsgenerator erzeugt und ist am
Kanal A (Ch1) eines Oszilloskops angeschlossen. A/D-Karte und D/A-Karte sind miteinander
über ein 40-poliges Flachbandkabel verbunden. Der Ausgang der D/A-Karte ist auf Kanal B
(Ch2) des Oszilloskops geführt.
Nehmen Sie vor jedem Versuch die zu Beginn jeder Aufgabe angegebenen Einstellungen an
Oszilloskop (OSZ) und Funktionsgenerator (FG) vor. Diese Grundeinsteilungen sollen Ihnen
helfen, die einzelnen Effekte beobachten zu können.
1. Quantisierung:
1.
FG: Dreieck, f=300 Hz
OSZ: 2 V/div (DC) (beide Kanäle); Zeitbasis 1 ms/div
Zunächst soll bei einer Auflösung von 12 Bit die Eingangsspannung an die Eingangsempfindlichkeit der AD-Wandler-Karte angepasst werden.
Schließen Sie dazu den Eingang des Verstärkers kurz, indem Sie das Amplitudenpotentiometer auf Linksanschlag drehen!
a) Welchem Binärwert entspricht die Spannung 0 V?
Drehen Sie das Einganspotentiometer auf Vollausschlag und regeln Sie Offset und
Amplitude des Signals („DC-OFFSET“ und „AMP“ am Funktionsgenerator) so aus,
dass der gesamte Aussteuerungsbereich ausgenutzt wird! Beobachten Sie dazu das
Ausgangssignal des D/A-Wandlers.
b) Wie lassen sich die Grenzen der Aussteuerbarkeit erkennen?
c) Bestimmen Sie Uss und berechnen sie daraus ULSB, 12bit und ULSB,.8bit!
2. Beobachten Sie die Leuchtdioden bei einer Frequenz von 0,1 Hz (Dreieck)! Beschreiben
Sie den Verlauf des Binärwerts bei Wandlung einer Dreieckspannung!
3. Schließen Sie an den Eingang eine Gleichspannungsquelle an!
a) Berechnen Sie den Gleichspannungswert anhand des LED-Anzeigewerts!
b) Versuchen sie, die LED zum Bit 0 gezielt mit Potentiometer zum Leuchten zu bringen.
4.
AD 16
FG: Dreieck,. f=300 Hz, Amplitude auf Minimum (-300 mVss)
OSZ: 50 mV/div (DC) (beide Kanäle), Zeitbasis 50 µs/div
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 8: AD Wandler
Es soll nun der Unterschied zwischen 8 Bit und 12 Bit Auflösung beobachtet werden.
a) Bestimmen Sie anhand des Oszillogramms ULSB,12bit und ULSB,8bit und vergleichen Sie
diese mit den berechnetem Wert!
b) Erhöhen Sie nun Amplitude und Frequenz! Die Interpolationswirkung des Ausgangsfilters auf der D/A-Wandler-Karte kann nun durch Zuschalten des Filters bei verschiedenen Amplituden und verschiedenen Auflösungen (8/12 Bit) beobachtet werden.
5. Messung des Quantisierungsrauschens.
FG: Sinus, f=300 Hz, Amplitude auf Minimum (-300 mV )
OSZ: 50 mV/div (AC), „ADD" (beide Kanäle addieren), Kanal A (CH1) invertiert, Zeitbasis 1 ms/div
a) Vergleichen Sie das Quantisierungsrauschen bei 8 Bit bzw. 12 Bit Auflösung!
b) Messen Sie das Quantisierungsrauschen bei einer Dreiecks-Eingangskurve!
2. Aliasing:
1.
FG: Sinus, f:>=10 kHz, Amplitude auf max. Aussteuerung (s. V1.1.)
OSZ: 2 V/div (AC) (beide Kanäle), Zeitbasis 50 µs/div
Schalten Sie die Filter auf beiden Wandlerkarten aus!
Beobachten Sie das Ausgangssignal, während Sie die Frequenz erhöhen (Verstärkung
und Zeitbasis am Oszilloskop nachstellen)!
a) Wie erklären Sie sich dieses Frequenzverhalten?
b) Was kann man anhand des Oszillogramms über die Frequenz des ungefilterten Eingangssignals aussagen?
c) Mit welcher Abtastfrequenz arbeitet das System?
d) Wählen Sie den Anti-Aliasing-Filter zweiter bzw. vierter Ordnung aus, bestimmen Sie
die Amplitude des Ausgangssignals bei folgenden Frequenzen und übertragen Sie
diese Werte in ein f-V-Diagramm!
f/kHz
1
5
10
12
14
15
17
18
20
2. Ordnung
4. Ordnung
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
AD 17
Versuch Nr. 8: AD Wandler
1
Uss/Umax
0,75
0,5
0,25
0
0
2
4
6
8
10
12
14
16
18
f/kHz
Erhöhen Sie nun die Frequenz über die Grenzfrequenz hinaus.
e) Sind die Aliasing-Erscheinungen nun verschwunden?
Vergleichen Sie die Wirkung der Filter 2./4. Ordnung!
6 Literatur
•
•
•
•
AD 18
[TS]: Tietze/Schenk: Halbleiter-Schaltungstechnik, Springer-Verlag
[SS]: Schrüfer: Signalverarbeitung, Hansa-Verlag
[SM]: Schrüfer: Elektrische Meßtechnik, Hansa-Verlag
[DAT]: DATEL: Handbuch der Datenwandlung
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
20
Versuch Nr. 9: Optik
Beschreibung zu Versuch Nr. 9:
Projektoren
Daniel Günther, Helmar Liess, überarbeitet von Marcus Fischer
1. Einordnung
Die im vorliegenden Versuch behandelten Grundlagen der Optik spielen in zahlreichen
technischen Anwendungen eine wichtige Rolle. Eine, aus dem Bereich der Mikrotechnik
stammende Anwendung stellen Videoprojektoren mit DLP („Digital Light Processing“) dar.
Diese sind aus so genannten DMD-Elementen („Digital Micromirror Devices“) aufgebaut.
Durch diese mikroskopisch kleinen Spiegel wird die Helligkeit der Lichtquelle nach dem
bereits in Versuch 3 genannten Prinzip der Pulsweitenmodulation für jedes Pixel des
sichtbaren Bildes verstellt.
Eine weitere Anwendung ist die Streifenlichtprojektion. Hier wird durch Verwendung von
Kondensoren (Linsen- oder Spiegelanordnung) aus einer Punktförmigen Lichtquelle ein
streifenförmiges Beleuchtungsmuster auf ein Messobjekt projiziert. Dieses Muster wird dann
von einer Kamera unter einem bestimmten Winkel zum Projektor aufgenommen. Die
Verzerrung der Streifen unter diesem Winkel gibt die Topologie des Messobjektes wieder.
Die Kameraaufnahme kann dann mit einem Rechner ausgewertet werden, um 3D-Bilder zu
erhalten. Bild 1 zeigt einen in einem industriellen Messgerät eingesetzten Projektor.
Bild 1: Streifenlichtprojektor des ABIS-Systems der Firma Steinbichler Optotechnik
Für die Beleuchtungstechnik ist es, nicht zuletzt aufgrund der mit steigender Leistung der
Lichtquelle steigenden Abwärme (Verlustleistung Glühbirne: ca. 95%) notwendig, die
Leuchtstärke der Lichtquelle möglichst vollständig auszunutzen.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
FD 1
Versuch Nr. 9: Optik
In Versuch 7 dieses Skriptes wurde eine Möglichkeit aufgezeigt, Tropfen mit Hilfe eines
Mikroskops zu vermessen. Hierbei spielt auf Grund der kurzen Belichtungszeiten die Stärke
der Beleuchtung eine entscheidende Rolle, weshalb eine besondere Optik zum Einsatz
kommt. Im vorliegenden Versuch 9 werden mit Hilfe eines Konsdensor sowie Linsensystems
die Grundlagen für die Projektion untersucht.
2. Theorie zu Beleuchtungsmethoden bei Film- und Diaprojektoren
2.1 Messung grundlegender Parameter
a) Lichtstärke I
Einheit: Candela (cd), auch Neukerze (NK), (früher Hefnerkerze)
Ein Candela ist die Lichtstärke, die ein schwarzer Körper bei der Temperatur von
schmelzendem Platin mit einer Oberfläche von 1/60 cm² senkrecht zu dieser Oberfläche
F besitzt.
I = B ⋅F =
dφ
;
dϕ r
1cd =
1/ m
1sterad
b) Lichtstrom φ
Einheit: Lumen (lm)
Ein Lumen ist der Lichtstrom φ , den eine Lichtquelle von der Lichtstärke I = 1 cd in den
Raumwinkel ϕ r = 1 sterad (4 π ) strahlt (Lumen ist eine Leistungseinheit).
φ = I ⋅ ϕr ;
1
= 1cd ⋅ 1sterad
m
c) Beleuchtungsstärke E
Einheit: Lux (lx)
Eine Fläche FP wird mit der Beleuchtungsstärke E = 1lx beleuchtet, wenn der Lichtstrom
φ = 1lm bei gleichmäßiger Verteilung auf 1 m² der Fläche senkrecht auftrifft.
E=
I ⋅ dϕ r
dφ
I
1lm 1cd
=
= 2 ; 1lx = 2 = 2
dFP
dFP
r
m
m
Aus obiger Umformung folgt eine andere Definition:
Eine Lichtquelle der Lichtstärke I = 1cd hat im Abstand r = 1m die Beleuchtungsstärke
E = 1lx .
FD 2
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 9: Optik
d) Leuchtdichte B
a. einer Lichtquelle
Einheit: Stilb (sb)
Eine Lichtquelle hat die Leuchtdichte B = 1sb , wenn jeder cm² der leuchtenden
Fläche die Lichtstärke I = 1cd hat.
B=
1cd
dI
; 1 sb =
dF
cm2
Leuchtdichte einiger Lichtquellen:
Mond 1 HK Glühlampe (100 W)
0,3 sb 0,7 sb
250 sb
Beck-Licht
10-100 ⋅ 10³ sb
Sonne
180 ⋅ 10³ sb
b. Leuchtdichte B einer angestrahlten Fläche
Einheit: Apostilb (asb)
Wird eine Fläche mit der Albedo (Weißheit) a = 1 mit der Beleuchtungsstärke E = 1lx
beleuchtet, so weist sie eine Leuchtdichte B = 1 asb auf.
B = E ⋅ a ; 1asb =
1cd
m2 ⋅ π
Es gilt außerdem: 1sb = 10 4 ⋅ π asb = 31415 asb
Albedo a einiger angestrahlter Flächen:
Titanweiß Weißes, gutes Schwarze Tusche Schwarzer Körper
Schreibpapier
0,99
0,70
0,015
0,001
e) Mechanisches Lichtäquivalent
Die Strahlung von Lichtquellen besteht zu einem großen Teil in Abhängigkeit von der
Wellenlänge λ aus nicht sichtbarer Wärmestrahlung. Das Verhältnis von ausgesandter
energetischer Strahlung zu umgesetzter Lichtempfindung bezeichnet man als mechanisches Lichtäquivalent M. Im Gelb-Grün-Bereich des Lichtspektrums ( λ = 0,555 µm) ist
das Verhältnis am günstigsten.
W
lm
M λ =0,555 = 0,016
; bzw. 1/ M = 625
lm
W
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
FD 3
Versuch Nr. 9: Optik
3 Ausprägungen im Versuch
3.1 Durchlicht-Projektoren
Bild 2: Abbildung großer Flächen: Dia-Projektor.
Bild 3: Abbildung kleiner Flächen: Kino-Projektion
3.2 Wirkungsweise von Kondensor und Spiegel
Kondensor und Spiegel vergrößern den Lichtstrom φ durch Bündelung des Lichts. Hierbei
wird das Licht eines großen Raumwinkels ϕ r um die Lampe zusammengefasst und auf
einen kleineren Raumwinkel nach dem Kondensor/Spiegel projiziert. Hierdurch wird die
Leuchtdichte B der Lampe erhöht.
Bild 4: Abbildung kleiner Flächen: Kino-Projektion
FD 4
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 9: Optik
Lichtstrom ohne Kondensor: Φ = B ⋅ F ⋅
Φ = B ⋅F ⋅
Lichtstrom mit Kondensor:
Abbildungsgesetz:
F ⎛g⎞
=
FW ⎜⎝ b ⎟⎠
FW
(g + b)
π D2
⋅
4 g
2
2
B ⋅F ⋅
=B⋅
π
4
Fw
für g b
b2
⋅ D2 ⋅
Fw
b2
2
Durch den Kondensor wird die Leuchtfläche von F auf D 2 ⋅
Erhöhung der Lichtstärke von BF auf BD 2 ⋅
π
4
π
4
vergrößert. Daraus folgt eine
.
4 Hausaufgaben
1. Welche Bedingungen muss der Schirm erfüllen, wenn man ein Bildobjekt, das nicht
parallel zur Linsenebene liegt scharf abbilden möchte? Siehe dazu auch Versuch Nr. 7!
2. Ein Objekt mit regelmäßigen Streifen wird wie in 1. beschrieben abgebildet. Welche
Auswirkungen ergeben sich auf das Streifenmotiv?
3. Warum schädigt die extreme Leuchtstärke der LED mit Kondensorlinse aus dem Versuch
7 das Auge nicht?
4. Der Filmprojektor in alten Kinos verursacht oft ein lautes ratterndes Geräusch. Welchen
technischen Grund könnte es dafür geben?
5. Welche messtechnische Besonderheit weist das Fotoelement zur Messung der Lichtstärke
auf? Was muss also im Messinstrument geschehen?
6. Sie wollen Tropfen aus einem Druckkopf mit dem Computer automatisch erfassen (siehe
Versuch 7). Welche Kennwerte des Grauwertbildes könnten für diese Automatisierung
genutzt werden?
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
FD 5
Versuch Nr. 9: Optik
5 Praktikumsaufgaben:
a)
Man ermittle die Größe des Lichtstromes φ der Lampe bei U = 12,6 V durch
Messung der mittleren Beleuchtungsstärke in 1 m Entfernung.
b)
Ordnen Sie auf der optischen Bank eine Lampe, Spiegel, Kondensor und Objektiv so
an, dass im Prinzip ein Kleinbildprojektor mit optimaler Lichtausnutzung entsteht. Wie
groß ist der Wirkungsgrad η der Lichtausbeute?
c)
Ermitteln Sie quantitativ den Einfluss von Kondensor und Spiegel! Wie groß ist der
Wirkungsgrad η ohne Spiegel bzw. ohne Kondensor?
Bild 5: Versuchsanordnung.
1 Hohlspiegel
2 Projektionslampe mit Höhenund Seitenverstellung
3 Kondensorlinse
4 Fenster für Bildbegrenzung
5 Objektiv
6 Photoelement mit Verdunklungsrohr
7 Projektionsschirm
8 Messinstrument (lx)
9 Optische Bank
Anmerkungen zur Praktikumsbearbeitung:
1. Berechnung der mittleren Beleuchtungsstärke und des Lichtstroms der Lampe:
Hierzu wird ohne den Spiegel (1), den Kondensor (3) sowie das Fenster (4) und das Objektiv
(5) mit dem Photoelement (6) die Beleuchtungsstärke gemessen. Dies soll in 1 m Entfernung
(Lampe zu Sensor) zunächst senkrecht zur Wendel sowie nach einer Drehung der Lampe (2)
90° geschehen. Die Lampenspannung UL,max soll dabei 12,6 V betragen (Hinweis: während
des Versuchs nicht in die Lampe schauen!).
Welche Werte ergeben sich für die Beleuchtungsstärke senkrecht zur Wendel E1 (lx) sowie
in Richtung der Wendel
E2 (lx)?
FD 6
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 9: Optik
Welchen Wert nimmt die mittlere Beleuchtungsstärke an?
2E1 + E2
Em ≈
(lx)
3
Wie hoch ist der Lichtstrom der Lampe φ (lm)?
2. Berechnung der Beleuchtungsstärke, des Lichtstroms etc.
Zunächst muss hierzu Spiegel (1) so hinter die Lampe gestellt werden, dass das Bild der
Wendel direkt unter oder über der Wendel erscheint. Dazu wird zunächst die Lampe
schwach erleuchtet (UL = 4 bis 6 V) und die Wendel mit dem Objektiv (5) auf dem
Projektionsschirm (7) abgebildet. Sodann wird mit Hilfe der Kondensorlinse ein Bild der
Wendel sowie dessen Spiegelbildes erzeugt, welches gerade groß genug sein soll, um das
Fenster (4) gut auszuleuchten. Das Fenster (4) wird daraufhin durch das Objektiv (5) auf
dem Projektionsschirm abgebildet. Mit Hilfe des Beleuchtungsstärke- Messgerätes (6,8) soll
die Beleuchtungsstärke E in der Mitte der beleuchteten Fläche auf dem Projektionsschirm
gemessen werden. Hieraus soll, unter der Annahme einer über die gesamte Fläche Fp
konstanten Beleuchtungsstärke der auffallende Lichtstrom berechnet werden.
3. Nach Entfernen des Spiegels (1), des Kondensors (3), bzw. beider Bauteile wird ebenfalls
die Beleuchtungsstärke E gemessen und der Lichtstrom ermittelt.
Tragen Sie die ermittelten Werte in nachfolgende Tabelle ein.
E (lx)
Projektor
FP (m2 )
φ (lm)
η (%)
Komplett mit Spiegel und Kondensor
Ohne Spiegel
Ohne Kondensor
Ohne Spiegel und Kondensor
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
FD 7
Versuch Nr. 9: Optik
6 Literatur
•
Vorlesungsskriptum „Mikrotechnische Sensoren und Aktoren“, Lehrstuhl für
Mikrotechnik und Medizingerätetechnik, Prof. T. Lüth, 2006, TUM München
•
Vorlesungsskriptum „Feingerätebau“, Lehrstuhl für Mikrotechnik und
Medizingerätetechnik, Prof. T. Lüth, 2006, TUM München
•
Vorlesungsskriptum „Feinmesstechnik 2“, Lehrstuhl für Mikrotechnik und
Medizingerätetechnik, Prof. T. Lüth, 2006, TUM München
FD 8
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 10: Längenmessung
Beschreibung zu Versuch Nr. 10:
Analoge Längenmessung mit Fotosensor
überarbeitet von Daniel Günther, Helmar Liess, Marcus Fischer
1. Einordnung
Messungen mit Interferometern erreichen hohe Auflösungen und sind für Kalibrier-,
Einrichtaufga-ben und Qualitätskontrolle gut geeignet. Die Abhängigkeit von den
Umgebungsbedingung bzw. der hohe Apparateaufwand für eine stabile Laser-Wellenlänge
(Laser: Light Amplification by Stimulated Emmision of Radiation) sind jedoch für den Einsatz
in Alltagsprodukten hinderlich.
Für das Drucksystem wäre eine solche Messmethode wenig praktikabel, wenn eine
geregelte Bewegung der Schlitten für hohe Genauigkeit und Dynamik angestrebt würde. Hier
eignen sich besonders Glasmaßstäbe oder Streifen aus transparentem Kunststoff
(Officedrucker!), auf welche die eine kodierte Weginformation aufgebracht ist. Diese
Systeme sind auch im Werkzeugmaschinenbau weit verbreitet.
Das Verfahren basiert darauf, dass eine Lampe mit einer Blende eine strukturierte (z. B. ein
Gitter) Beleuchtung auf den Maßstab wirft. Dieses weist das gleiche Muster über seine
gesamte Länge auf. Hinter dem Maßstab ist ein fotoempfindliche Diode angeordnet. Trifft ein
heller Streifen aus der Lampe einen Spalt im Gitter des Maßstabes wird die Diode
beleuchtet. Das Auftreffen der Photonen verursacht eine Diffussionsspannung zwischen den
entgegen gesetzt dotierten Zonen der Diode. Der hierdurch verursachte Stromfluss kann
daraufhin als Messgröße ausgewertet werden.
Bild 1: Schema eines Glasmaßstabes
Hier im Praktikumsversuch sollen die Grundlagen der in diesen Systemen verwendeten
Messmethode gezeigt werden.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
LM 1
Versuch Nr. 10: Längenmessung
2. Theorie zur analogen Längenmessung mit einem Fotosensor
Allgemeines
Fotodioden sind fotoelektrische Halbleiter mit einer lichtempfindlichen Sperrschicht: Der
Betrieb des pn-Übergangs erfolgt bei fast allen Anwendungen in Sperrrichtung:
Bild 2: K = Kathode, A = Anode. Darstellung des fotoelektrischen Halbleiters mit
lichtempfindlicher Sperrschicht. *Die Aufgabe des Lastwiderstandes ist einerseits die
Vermeidung großer Ströme, wenn der Widerstand der Diode sehr klein wird, andererseits
dient diese Schaltung als Spannungsteiler.
Ohne Beleuchtung zeigt die Fotodiode normale Diodensperrcharakteristik. In diesem
Zustand fließt ein, wenn auch sehr geringer Sperrstrom. Wird die Beleuchtungsintensität
erhöht, so steigt der Sperrstrom proportional. Daraus ergeben sich zwei
Hauptanwendungsfälle:
Fall 1
Fall 2
Bild 3: Darstellung der zwei Hauptanwendungsfälle 1 und 2.
Im Fall 1 wird stets die ganze lichtempfindliche Fläche der Diode mittels einer Lampe
beleuchtet, deren Leuchtintensität z. B. durch die Spannung US ( t ) variiert wird. An der
Fotodiode kann die Spannung UD ( t ) gemessen werden, wobei U D (t ) ~ U S (t ) ist.
Hauptanwendung: Nachrichtentechnik, Empfang modulierter Signale.
LM 2
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 10: Längenmessung
Im Fall 2 wird die Sendeleistung konstant gehalten. Der Fotodiodenstrom wird dadurch
variiert, dass die lichtempfindliche Diodenfläche durch eine verschiebliche Blende teilweise
oder ganz abgedeckt wird.
Der (durch den Lichteinfall) abfallenden Spannung UD ( x ) kann jeweils einer bestimmten
Verschiebung der Blende zugeordnet werden. Hierdurch können unterschiedliche
Verschiebungen von zwei Objekten zueinander gemessen werden. Diese Zuordnung ist
Grundlage der folgenden Versuche:
Bild 4: Schaltbild 1 - Brückenschaltung mit Differenzverstärker.
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
LM 3
Versuch Nr. 10: Längenmessung
3. Ausprägung im Versuch
Die Infrarotdiode OP 130 dient als Beleuchtung (Fotodioden sind stark IR-lichtempfindlich).
Ihr Strom wird durch die Widerstände R4 und R5 begrenzt. Der Widerstand R5 kann durch
den Schalter S kurz geschlossen werden: hierdurch erhöht sich der Stromfluss und somit die
Leuchtstärke der Diode. Die Infrarotstrahlen gelangen auf den Empfänger, die Fotodiode
BPX 48. Diese Diode besteht aus zwei lichtempfindlichen Flächen, deren geometrischer
Aufbau aus der Skizze hervorgeht.
Bild 5: Versuchsanordnung.
Der physikalische Aufbau der BPX 48 setzt sich aus zwei Anoden, aber nur einer
gemeinsamen Kathode zusammen. Die Einsatzmöglichkeiten
entsprechen denen von zwei getrennten Fotodioden, jedoch besitzt
die BPX 48 zusätzliche Vorteile: Durch die Herstellung auf einem
Chip unterscheidet sich die Lichtempfindlichkeit der Dioden nur
wenig. Die lichtempfindlichen Flächen sind durch einen
gleichmäßigen Steg von nur 0,086 mm Breite getrennt. Dies erweist
sich beim Einsatz in Brückenschaltungen von Vorteil.
Den Empfängerdioden wird ein Operationsverstärker nachgeschaltet. Die externe
Beschaltung lässt sich auf den Experimentiertafeln gemäß den Anforderungen realisieren.
Genaueres über Operationsverstärker kann Versuch Nr. 3 (OP) entnommen werden. Hier
sind auch die Formeln für die Verstärkung als Differenz- und Summationsverstärker zu
entnehmen. Im Schaltbild ist der OP als Differenzverstärker ausgelegt. Seine
Ausgangsspannung wird am Anzeigegerät (Digitalvoltmeter) gemessen.
LM 4
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 10: Längenmessung
Ist am vorhandenen Wegmesssystem keine Blende im Strahlengang, so werden beide
Fotodiodenflächen gleich bestrahlt (Blendenanordnung siehe Bild 6). Dadurch fließt durch
die Dioden und ihre Lastwiderstände R1, R2 annähernd gleicher Strom: I1 ≈ I2. Auch für die
Spannungsabfälle an R1 und R2 gilt in diesem Fall U1 ≈ U2. Die Ausgangsspannung am
Differenzverstärker beträgt somit UA ≈ 0 V.
Bild 6: Blenden (Maßstab 1:1).
Dieses Brückengleichgewicht wird gestört, sobald das Verhältnis der bestrahlten Flächen ≠ 1
wird. Wie anfangs erwähnt, kann dies durch Ausblenden von Lichtstrahlen bewirkt werden.
Die hierzu verwendete Blendenanordnung und Verstellung ist aus der Zeichnung des
elektromechanischen Aufbaues (Bild 8) ersichtlich! Entsprechend gilt I1 ≠ I2 und damit auch
UA ≠ 0. Genaueres über die Brückenschaltung ist in Versuch Nr. 2 (TRA) nachzulesen.
Bild 7: Elektromechanische Versuchsanordnung (Maßstab verkleinert).
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
LM 5
Versuch Nr. 10: Längenmessung
Bild 8: Blockdarstellung des Versuchsaufbaues.
LM 6
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 10: Längenmessung
4. Hausaufgaben
1. Wie sieht die Anordnung der Diode, der Blenden und der Lampe in einem Glasmaßstab
aus?
2. Wie könnte bei einem Glasmaßstab eine Vorwärts- und Rückwärtserkennung der
Bewegungsrichtung realisiert werden?
3. Was könnte der Ausdruck inkrementeller Maßstab bedeuten? Welche Alternative ist
prinzipiell vorstellbar?
4. Die Diode mit dem Lastwiderstand stellt einen Spannungsteiler dar. Leiten sie die
Gleichung her, die die Spannung zwischen den Bauelementen beschreibt, wenn die
Schaltung mit der Batteriespannung UB betrieben wird!
5. Welche Folgen hat die folgende Störung der Messanordnung? Der Sensor ist gegenüber
der Blende verdreht.
6. Berechnen Sie unter Zuhilfenahme der Formeln aus Versuch Nr. 3 den Verstärkungsfaktor
der Differenzverstärkerschaltung in Schaltbild 1 (Bild 4)!
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
LM 7
Versuch Nr. 10: Längenmessung
5. Praktikumsaufgaben:
1. Aufbau der Schaltung
Stecken Sie die Schaltung unter Zuhilfenahme der Blockdarstellung des Versuchsaufbaues
und des Schaltbildes. Um Fehlschaltungen zu vermeiden, wurde die Zwei-Stufenschaltung
der Beleuchtung in der Frontplatte des Netzgerätes untergebracht.
Der elektromechanische Messaufbau geht über Diodenstecker ebenfalls in die Frontplatte.
Alle Verbindungen von der Frontplatte zu den Experimentiersteckplatten erfolgen über
Laborkabel.
Wichtig! Das Netzgerät erst dann einschalten, wenn die Schaltung durch den zuständigen
Betreuer geprüft wurde!
2. Abnahme der Empfängerhalterung
Nehmen Sie vorsichtig die Empfängerhalterung vom Gestell (Lösen von zwei
Rändelschrauben). Durch die freie Bohrung können Sie die Blenden erkennen. Verschieben
Sie den Schlitten, bis der durchsichtige Bereich „E“ über der Sendediode liegt. Halten Sie
den Infrarot-Wandlerschirm möglichst nah darüber. Sie können ein schwaches Leuchten
feststellen (Die Intensität nimmt mit Stufe II der Beleuchtung zu).
3. Zusammenbau der Empfängerhalterung
Passen Sie die Empfängerhalterung wieder ein! Drehen Sie die Halterung langsam um 360°
und ermitteln Sie hierbei den Höchst- sowie den Tiefstwert von U A : U A,max , U A,min !
Welche Aussagekraft hat diese Messung?
4. Symetrieren
Klemmen Sie die Empfängerhalterung, wobei die Markierungen an der Halterung und am
Gestell übereinstimmen müssen (Fotodiodenspalt parallel zu Blendenkanten)!
4.1 Drehen Sie die Mikrometerschraube (abnehmender Wert), so dass Blende 5 in den
Strahlengang gelangt!
Erstellen Sie ein Diagramm U A ( x ) in der Umgebung der Symmetrielage der Blende für
beide Beleuchtungsstufen!
Maßstäbe:
x
0,01 mm
UA
0,1 V
entspr.
entspr.
1 mm (Abszisse)
50 mm (Ordinate)
Empfohlenes Messintervall ≈ 0,05 mm
4.2 Drehen Sie die Mikrometerschraube (abnehmender Wert), so dass Spalt C in den
Strahlengang gelangt!
Erstellen Sie wieder Diagramme für U A ( x ) , entsprechend Aufgabe 4.1!
4.3 Bringen Sie den Spalt C in die Symmetrielage U A = 0 !
LM 8
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 10: Längenmessung
Lösen Sie die Klemmung der Empfängerhalterung.
Drehen Sie die Empfängerhalterung durch! Messen Sie U A,min und U A,max !
Warum weichen diese Werte nur wenig von 0 V ab?
4.4 Bestimmen Sie den Abstand CB durch Symmetrisieren der Spalte!
5. Analoge Längenmessung
Hierbei wird der Differenzverstärker (Schaltbild 1, s. Bild 4) durch einen
Summationsverstärker (Schaltbild 2, siehe Bild 9) ersetzt. Es werden also die
Spannungsabfälle an R1 und R2 aufsummiert.
Bild 9: Schaltbild 2 - Brückenschaltung mit Summationsverstärker.
5.1 Berechnen Sie den notwendigen Wert des Widerstandes R , um eine Verstärkung von ≈
-4,55 zu erhalten! Stecken Sie diese Schaltung!
5.2 Verstellen Sie die Mikrometerschraube so, dass der Spalt E über dem Sender liegt!
Drehen Sie die Empfängerhalterung um 90° (Fotodiodenspalt ≈ Blendenkanten)! Stellen Sie
Diagramme U A ( x )
für beide Beleuchtungsstärken auf, indem Sie schrittweise die
Diodenflächen durch die Blende 6 abdecken! Schrittweite am Mikrometer: 0,2 mm
Maßstäbe:
x
0,02 mm
entspr.
1 mm (Abszisse)
UA
0,1 V
entspr.
20 mm (Ordinate)
Bestimmen Sie die feinste Auflösung für beide Fälle in µm/mV.
5.3 Warum geht die Beleuchtungsstärke stark in das Messresultat ein?
5.4 Welche Einflüsse bewirken, dass die Werte für U A ( x ) nicht ganz linear verlaufen?
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
LM 9
Versuch Nr. 10: Längenmessung
5.5 Woran kann es liegen, dass das Diagramm an den Enden des analogen Messbereiches
gekrümmt ist und nicht kantig einmündet?
6. Analoge Längenmessung mit Strom-Spannungsumsetzer
Während beim Summationsverstärker unter Punkt 5 der Strom durch die Fotodioden in
Spannungen an den Widerständen R1 und R2 umgesetzt wurde, soll nun diese Aufgabe
durch den Operationsverstärker direkt vorgenommen werden.
Bild 10: Prinzipschaltbild.
Sieht man von den Strömen ab, die in den Verstärker fließen, gilt:
I1 + I0 = 0 ; I1 = −I0
U A = I ⋅ R0 = −I1 ⋅ R1
Diese Anordnung hat den Vorteil, dass der Lastwiderstand entfällt (geringere Abhängigkeit
von Temperaturdrift) und dass die Signalleitung niederohmig ist. Der Spannungsabfall über
der Diode beträgt dann ≈ 0 V, unabhängig von der Beleuchtungsstärke (Genaueres über
Strom-Spannungsumsetzer siehe Literaturliste).
6.1 Stecken Sie die Schaltung des folgenden Schaltbildes:
Bild 11: Schaltbild 3 – Sensor mit Strom-Spannungsumsetzer.
LM 10
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
Versuch Nr. 10: Längenmessung
Wichtig! Das Netzgerät erst dann einschalten, wenn die Schaltung durch den zuständigen
Betreuer geprüft wurde!
6.2 Führen Sie den Versuch mit der Schaltung entsprechend 5.2 durch, jedoch nur mit der
schwachen Beleuchtungsstufe!
Maßstäbe:
x
0,02 mm
entspr.
1 mm (Abszisse)
UA
0,1 V
entspr.
20 mm (Ordinate)
6.3 Bestimmen Sie U A als Funktion von I A , R0 und R3 !
6. Literatur
•
Vorlesungsskriptum „Mikrotechnische Sensoren und Aktoren“, Lehrstuhl für
Mikrotechnik und Medizingerätetechnik, Prof. T. Lüth, 2006, TUM München
•
Vorlesungsskriptum „Feingerätebau“, Lehrstuhl für Mikrotechnik und
Medizingerätetechnik, Prof. T. Lüth, 2006, TUM München
•
Vorlesungsskriptum „Feinmesstechnik 2“, Lehrstuhl für Mikrotechnik und
Medizingerätetechnik, Prof. T. Lüth, 2006, TUM München
Praktikum Mikrotechnik 2011
Lehrstuhl für Mikrotechnik und Medizingerätetechnik
LM 11