kapitel 1-4 - Fakult at f ur Physik
Werbung

Notizen zur Vorlesung
Einführung in die Physik I
WS 2012/13
Prof. Dr. Hanspeter Helm
Physikalisches Institut,
Universität Freiburg
http://frhewww.physik.uni-freiburg.de
14. November 2012
Inhaltsverzeichnis
1 Einführung
1
2 Impulserhaltung
2.1 Wechselwirkung und Bewegung . . . . . . . . . . . . .
2.1.1 Betrag der Geschwindigkeit . . . . . . . . . . .
2.1.2 Impulserhaltung in Stoßexperimenten . . . . .
2.1.3 Masse und Gewicht . . . . . . . . . . . . . . . .
2.1.4 Richtung des Impulses . . . . . . . . . . . . . .
2.1.5 Transfer von Impuls bei einer Wechselwirkung
2.2 Kinematik von Teilchen und Systemen aus Teilchen . .
2.2.1 Position, Geschwindigkeit und Impuls . . . . .
2.2.2 Systeme von Teilchen . . . . . . . . . . . . . .
2.2.3 Schwerpunkt eines Systems von Teilchen . . . .
2.2.4 Bewegung des Schwerpunktes . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
. 3
. 4
. 4
. 5
. 5
. 6
. 7
. 7
. 8
. 9
. 10
3 Energieerhaltung
3.1 Definitionen zur Energie . . . . . . . . . . . . . . . . . . . .
3.1.1 Wechselwirkung und Energie . . . . . . . . . . . . .
3.1.2 Beobachtungen zur potentiellen Energie . . . . . . .
3.2 Funktionen potentieller Energie . . . . . . . . . . . . . . . .
3.2.1 Coulomb Wechselwirkung . . . . . . . . . . . . . . .
3.2.2 Gravitationswechselwirkung . . . . . . . . . . . . . .
3.2.3 Gravitation in Erdnähe . . . . . . . . . . . . . . . .
3.2.4 Potentielle Energie einer Feder . . . . . . . . . . . .
3.2.5 Molekulare Potentialfunktion . . . . . . . . . . . . .
3.2.6 Anwendungsbeispiele . . . . . . . . . . . . . . . . . .
3.3 Energietransfer . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.1 Impuls und kinetische Energie . . . . . . . . . . . . .
3.3.2 Kontaktwechselwirkung . . . . . . . . . . . . . . . .
3.3.3 Impuls, Kraft und Energie . . . . . . . . . . . . . . .
3.4 Rotationsenergie . . . . . . . . . . . . . . . . . . . . . . . .
3.4.1 Winkel und ihre Messung . . . . . . . . . . . . . . .
3.4.2 Winkelgeschwindigkeit . . . . . . . . . . . . . . . . .
3.4.3 Trägheitsmoment . . . . . . . . . . . . . . . . . . . .
3.4.4 Rollbewegung ohne Schlupf . . . . . . . . . . . . . .
3.4.5 Impuls- und Energieerhaltung beim elastischen Stoß
3.5 Thermische Energie . . . . . . . . . . . . . . . . . . . . . .
3.5.1 Definitionen zur thermischen Energie . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
I
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
11
11
12
13
14
14
14
15
15
16
16
17
17
18
18
19
19
19
20
22
23
24
24
II
INHALTSVERZEICHNIS
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
25
26
27
27
28
28
29
29
29
30
30
4 Erhaltung des Drehimpulses
4.1 Einführung zum Drehimpuls . . . . . . . . . . . . .
4.2 Drehimpuls eines Teilchens . . . . . . . . . . . . .
4.2.1 Einheit des Drehimpulses . . . . . . . . . .
4.2.2 Mechanischer Ursprung eines Drehimpulses
4.2.3 Erhaltung des Drehimpulses . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
31
31
31
32
32
33
. . . .
. . . .
. . . .
. . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
35
35
36
36
37
40
42
42
42
43
44
44
45
45
46
48
49
49
50
50
51
52
53
55
55
56
57
57
58
58
59
3.6
3.7
3.5.2 Wärme und Arbeit . . . . . . . . . .
3.5.3 Spezifische Wärmekapazität . . . . .
Energie in Bindungen . . . . . . . . . . . .
3.6.1 Potentielle Energiefunktion . . . . .
3.6.2 Molekulare Bindung . . . . . . . . .
3.6.3 Latente Wärmekapazität . . . . . . .
3.6.4 Chemische Energie und Kernenergie
Andere Energieformen . . . . . . . . . . . .
3.7.1 Leistung . . . . . . . . . . . . . . . .
3.7.2 Elektrische Energie . . . . . . . . . .
3.7.3 Energie in Schall und Licht . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
5 Modell von Newton
5.1 Entfernung als Integral . . . . . . . . . . . . . . . . . . . .
5.2 Beschleunigung . . . . . . . . . . . . . . . . . . . . . . . .
5.2.1 Definition der Beschleunigung . . . . . . . . . . . .
5.2.2 Bewegungsgleichung bei konstanter Beschleunigung
5.2.3 Beschleunigung bei gleichförmiger Kreisbewegung .
5.3 Newton’sche Axiome . . . . . . . . . . . . . . . . . . . . .
5.3.1 Newton’s Erstes Axiom . . . . . . . . . . . . . . .
5.3.2 Newton’s Zweites Axiom . . . . . . . . . . . . . . .
5.3.3 Newton’s Drittes Axiom . . . . . . . . . . . . . . .
5.3.4 Kräftevergleich mit Federwaage . . . . . . . . . . .
5.3.5 Träge und schwere Masse . . . . . . . . . . . . . .
5.3.6 Gewicht und Projektilbewegung . . . . . . . . . .
5.3.7 Energie und Kraft . . . . . . . . . . . . . . . . . .
5.4 Kraftfelder . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4.1 Vektoraddition und Vektorzerlegung von Kräften .
5.4.2 Klassifizierung von Kräften . . . . . . . . . . . . .
5.5 Kraftwirkung bei Drehungen . . . . . . . . . . . . . . . .
5.5.1 Drehmoment und Gleichgewichtsbedingung . . . .
5.5.2 Kinetische Energie der Drehbewegung . . . . . . .
5.5.3 Trägheitsachsen . . . . . . . . . . . . . . . . . . . .
5.5.4 Rollende Körper . . . . . . . . . . . . . . . . . . .
5.5.5 Kreiselbewegungen . . . . . . . . . . . . . . . . . .
5.6 Kontaktkräfte und Reibung . . . . . . . . . . . . . . . . .
5.6.1 Haft-, Gleit-, und Rollreibung . . . . . . . . . . . .
5.6.2 Strömungswiderstand . . . . . . . . . . . . . . . .
5.7 Kreisbewegung . . . . . . . . . . . . . . . . . . . . . . . .
5.7.1 Gleichförmige Kreisbewegung . . . . . . . . . . . .
5.7.2 Ungleichförmige Kreisbewegung . . . . . . . . . . .
5.7.3 Fliehkräfte ? . . . . . . . . . . . . . . . . . . . . .
5.7.4 Überhöhte Kurven . . . . . . . . . . . . . . . . . .
INHALTSVERZEICHNIS
5.8
5.9
III
5.7.5 Charakteristika der Bewegung und Form
5.7.6 Geoid der Erde . . . . . . . . . . . . . .
Planetenbahnen, Keplersche Gesetze . . . . . .
5.8.1 Schwarze Löcher . . . . . . . . . . . . .
Nicht-Inertialsysteme . . . . . . . . . . . . . . .
5.9.1 Galilei Transformation . . . . . . . . . .
5.9.2 Detektor für Inertialsysteme . . . . . . .
5.9.3 Linear beschleunigte Systeme . . . . . .
5.9.4 Zirkular beschleunigte Systeme . . . . .
6 Harmonische Schwingungen
6.1 Mathematisches Pendel . . . . . . . .
6.2 Harmonische Schwingung einer Feder .
6.3 Drehschwingung . . . . . . . . . . . .
6.4 Komplexe Darstellung eines Oszillators
der Erde
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
61
62
63
64
64
64
66
66
67
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
71
71
73
74
74
7 Deformierbare Körper
7.1 Atomares Modell der Aggregatzustände
7.2 Deformierbare feste Körper . . . . . . .
7.3 Hydrostatik - Ruhende Flüssigkeiten . .
7.4 Grenzflächen an Flüssigkeiten . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
77
77
78
80
81
.
.
.
.
.
.
85
85
86
87
91
93
94
.
.
.
.
.
.
.
.
.
.
.
.
99
100
101
102
104
104
105
.
.
.
.
.
.
.
107
. 107
. 108
. 109
. 110
. 110
. 111
. 113
8
Gase
8.1 Makroskopische Betrachtung . . . . . . .
8.2 Luftdruck und barometrische Höhenformel
8.3 Kinetische Gastheorie . . . . . . . . . . .
8.4 Transportprozesse in Gasen . . . . . . . .
8.5 Vakuumphysik . . . . . . . . . . . . . . .
8.6 Erdatmosphäre . . . . . . . . . . . . . . .
9 Strömungen
9.1 Massenerhaltung, Kontinuitätsgleichung
9.2 Reibungsfreie Strömungen . . . . . . . .
9.3 Innere Reibung, Zähigkeit . . . . . . . .
9.4 Strömung um Hindernisse . . . . . . . .
9.5 Dynamischer Auftrieb, Zirkulation . . .
9.6 Reynolds’sche Zahl . . . . . . . . . . . .
10 Mechanische Schwingungen
10.1 Freier ungedämpfter Oszillator .
10.2 Freier gedämpter Oszillator . . .
10.3 Erzwungene Schwingungen . . .
10.4 Parametrischer Oszillator . . . .
10.5 Gekoppelte Oszillatoren . . . . .
10.6 Überlagerung von Schwingungen
10.7 Fourier-Analyse . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0
11 Mechanische Wellen
11.1 Ausbreitung von Wellen in
11.2 Überlagerung von Wellen
11.3 Ausbreitung von Wellen .
11.4 Stehende Wellen . . . . .
11.5 Doppler Effekt . . . . . .
11.6 Akustik . . . . . . . . . .
INHALTSVERZEICHNIS
Medien
. . . . .
. . . . .
. . . . .
. . . . .
. . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
115
118
120
120
122
122
123
12 Thermodynamik
12.1 Temperaturmessung . . . . . . .
12.2 Wärmemenge, Wärmekapazität .
12.3 Innere Energie . . . . . . . . . .
12.4 Wärmetransport . . . . . . . . .
12.5 Hauptsätze der Thermodynamik
12.6 Der erste Hauptsatz . . . . . . .
12.7 Zweiter Hauptsatz . . . . . . . .
12.8 Entropie . . . . . . . . . . . . . .
12.9 Reale Gase und Flüssigkeiten . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
125
125
129
131
134
138
140
143
145
148
A Maßeinheiten und SI System
A.1 Längeneinheiten . . . . . .
A.2 Zeiteinheiten . . . . . . . .
A.3 Masseneinheiten . . . . . .
A.4 Stromstärke . . . . . . . . .
A.5 Temperatureinheit . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
151
151
152
153
154
154
.
.
.
.
.
.
.
.
.
.
B Koordinatensysteme
.
.
.
.
.
155
C Vektoren
157
C.1 Verschiebungsvektor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
C.2 Vektoroperationen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
D Messgenauigkeit und Messfehler
161
Kapitel 1
Einführung
Die Physik entstammt aus dem Verlangen zu verstehen, was unsere komplexe Welt zusammenhält und welche Gesetzmäßigkeiten die Entwicklung der Welt bestimmen. Physik befasst
sich mit der
• Struktur der Materie und dem
• Verhalten von Materie und Strahlung.
Da alles um uns Materie und Strahlung zugeordnet werden kann, könnte man auch argumentieren, dass Physik die grundlegendste aller Wissenschaften ist.
Geprägt ist die Physik durch die der Einbindung der Mathematik in die wissenschaftliche Argumentation. Diese Einbindung wird möglich durch die quantitative Beobachtung
von Ereignissen und die mathematische Beschreibung der Beobachtung in Modellen. Diese
Methodik ist Grundlage für jede Wissenschaft.
- Modellbildung, mathematischer Rahmen und Konsistenz mit Beobachtungen
Vorlesung: Modellbildung und gängige Modelle, mit Vorzeige Experimenten.
Praktika: Sie experimentieren selbst und prüfen Modelle auf ihre quantitative Richtigkeit.
Bachelor-, Master-, Doktorarbeit : Sie entwickeln Modelle oder Sie entwickeln neue experimentelle Ansätze zu deren Prüfung.
- Beobachtung, Hinterfragen, dazu drei Versuche.
Experimente : (A13, A14, A15)
Fehlinterpretation ist häufiger als man denkt, man ist ja überzeugt.
In dieser ersten Vorlesung versuchen wir, unsere Begriffswelt mit physikalischen Gesetzen
in Einklang zu bringen. Als Kinder lernten wir Bewegung zu verstehen: Objekte reagieren
wenn sie angeschoben oder gezogen werden. Kraft ist notwendig, Kraft wird ausgeübt, oder
man spürt sie. Aus dieser Erfahrung haben wir Bilder zu Kraft, Geschwindigkeit, Trägheit,
Gravitation, Impuls entwickelt.
1687 zeigte NEWTON dass zwischen Bewegung und Kraft (und zwischen Kraft und Bewegung) ein universeller Zusammenhang gilt. Newtons Gesetze habe große Vorhersagekraft.
1
2
KAPITEL 1. EINFÜHRUNG
Die Physik ist durch Axiome begründet (z.B. Newtonsche Axiome). Diese Axiome müssen experimentell nachprüfbar sein. Sie vermitteln anschauliche Bilder von Teilchen, Wellen,
Feldern, wie wir sie in unserer makroskopischen Umgebung erleben und beobachten. Die
Axiome fügen diese Beobachtungen in einen mathematischen Rahmen, eine logisch konsistente Struktur, mit dem deterministische Vorhersagen über die Zukunft und Vergangenheit
möglich sind.
- Struktur der heutigen Physik
Die mikroskopische Struktur der Materie und die Komplexität der Natur bringt es mit sich,
dass deterministische Aussagen über jeden einzelnen Baustein der Materie aus mangelnder
Information nicht möglich sind. Neben den Axiomen muss ein Wahrscheinlichkeitsbegriff
(Thermodynamik) eingeführt werden.
Die Quantenmechanik birgt Widersprüche mit klassischen Vorstellungen zur präzisen Ortsund Impulsbestimmung. Welle Teilchen Dualismus...
Die Relativitätstheorie revolutioniert unser alltägliches Verständnis von Raum und Zeit und
deckt Zusammenhänge zwischen Raum, Zeit und Masse auf, die sich unserer alltäglichen
Erfahrung der Welt entziehen.
- Erhaltungssätze und grundsätzliche Ideen begleiten uns durch die gesamte Physik :
• Erhaltungssätze bestimmen jede Art von Wechselwirkung.
• Alle Objekte gehorchen Bewegungsgleichungen.1
• Elektromagnetische Felder haben eine Eigendynamik und gehorchen
Bewegungsgleichungen.2
• Dieselben physikalischen Gesetze sollen für alle Beobachter gelten, auch wenn sie sich
zueinander gleichförmig bewegen.3
• Ort und Impuls sind nicht gleichzeitig scharpf bestimmbar, Energie und Drehimpuls
sind quantisiert, Teilchen und Photonen verhalten sich gleich, sie sind weder Materie
noch Wellen.4
• Die Komplexität der Natur und die damit verbundene Vielfalt von Freiheitsgraden
bringen es mit sich, dass mancher Fluss von Energie irreversibel ist.5
Wir beginnen diese Vorlesung mit drei Erhaltungssätzen aus der klassischen Physik,
Impuls-, Energie- und Drehimpuls-Erhaltung.
1 Klassische
Mechanik, Isaac Newton 1687 Philosophiae Naturalis Principia Mathematica
James Clerk Maxwell 1865 A Dynamical Theory of the Electromagnetic Field
3 Spezielle Relativitätstheorie, Albert Einstein 1907 Über das Relativitätsprinzip und Folgerungen
4 Quantenmechanik, Louis de-Broglie, Werner Heisenberg, Paul Dirac, Erwin Schrödinger 1924-26
5 Statistische Mechanik, Ludwig Boltzmann, Josiah Willard Gibbs 1872-80
2 Elektrodynamik,
Kapitel 2
Impulserhaltung
2.1
Wechselwirkung und Bewegung
Aus unserem täglichen Verständnis ist Bewegung eine Konsequenz von Kräften und Kräfte
sind verbunden mit Schub oder Zug. Diese Einschätzung genügt, da im täglichen Leben
immer Reibung auftritt und früher oder später alles Bewegte zur Ruhe kommt. Fragen
stellen sich bei kleiner Reibung, ein Kind auf einem fast reibungsfreien Skateboard oder auf
Schlittschuhen: Wenn Bewegung durch Kraft entsteht, welche Kraft bewegt es immer noch
nachdem es einmal angeschoben wurde? Eine Kraft, die gewissermaßen eine Erinnerung an
die anfängliche Kraft darstellt?
Das Modell von Newton liefert dazu einfache und logische Antworten.
Die folgenden qualitativen Antworten sind immer richtig:
1. Jede Kraftwirkung (Schub oder Zug) auf ein Objekt ist immer Ausdruck, dass unser
Objekt im Moment der Kraftwirkung mit einem anderen Objekt in Wechselwirkung
tritt.
2. Mit Wechselwirkung beschreiben wir den
interaction
a) direkten physikalischen Kontakt zweier Körper, z.B. Schub oder Zug,
b) eine langreichweitige Wechselwirkung (elektromagnetische Wechselwirkung, Gravitation).
Magnete
! Bei genauerem Hinsehen stellt sich heraus, dass direkter physikalischer Kontakt
zweier Körper Ausdruck der elektromagnetischen Wechselwirkung ist - gepaart
mit quantenmechanischen Effekten, welche die Stabilität der Materie begründen.
3. Wenn ein Objekt abgeschlossen (isoliert) ist, dann unterliegt es keiner Wechselwirkung
mit der Außenwelt und sein Bewegungszustand ändert sich nicht. (Erstes Axiom von
Newton)
4. Wenn ein Objekt eine einzelne Wechselwirkung mit einem anderen Objekt macht dann
führt dies immer zu einer Änderung seines Bewegungszustandes. Mehrere Wechselwirkungen können gleichzeitig wirken, dann könnten sie sich auch aufheben.
Der Bewegungszustand ändert sich, wenn sich der Impuls des Objektes ändert.
3
state of motion
4
KAPITEL 2. IMPULSERHALTUNG
2.1.1
speed
Betrag der Geschwindigkeit
Um Newtons Modell quantitativ zu fassen bedarf es mehrerer Definitionen zum Bewegungszustand, z.B der Definition des Geschwindigkeitsbetrages
v⌘
|d~r |
dt
(2.1)
Zur Interpretation von (2.1): ⌘ steht für "definiert als".
dt ist ein kurzes Zeitintervall, so kurz, dass sich der Bewegungszustand (im Sinne wie es sich bewegt) in dieser Zeit nicht ändert.
|d~r | ist der Betrag der in dieser Zeit zurückgelegte Strecke. Die
Bedeutung von d ist "winzig klein, infinitesimal".
Maßeinheiten sind notwendig für eine quantitative Angabe, wir verwenden SI Einheiten,
siehe Appendix A. Die Dimension der Geschwindigkeit ist [v] =Länge/Zeit.
Die SI-Einheit für die Geschwindigkeit ist [v] = m/s.
2.1.2
Impulserhaltung in Stoßexperimenten
Wir versuchen ein Verständnis für die Impulserhaltung zu entwickeln. Dazu betrachten wir
Experimente mit Schlitten, die auf nahezu reibungsfreien Zugschienen laufen und einem elastischen Stoss unterliegen. Wir messen die Geschwindigkeiten vor und nach dem Stoß.1
1) Elastischer Stoß zweier Schlitten gleicher Masse
Masse m mit
Geschwindigkeit v
Masse m
in Ruhe
Experimente (A42.2)
Masse m
in Ruhe
VORHER
Masse m mit
Geschwindigkeit v
NACHHER
2) Elastischer Stoß zweier Schlitten mit den Massen m1 = 2m2 .
Masse 2m mit
Geschwindigkeit v
Masse m in
Ruhe
VORHER
Masse 2m mit
Geschwindigkeit vê3
Masse m mit
Geschwindigkeit 4vê3
NACHHER
Mit der Hypothese, dass der Betrag des Impulses
(2.2)
p ⌘ mv
ist, ergibt unsere Analyse der Stoßexperimente : Die Wechselwirkung zwischen den Schlitten
erfolgt so, dass der Gesamtimpuls erhalten bleibt.
Verallgemeinerung des Modells:
Jede Wechselwirkung zwischen zwei Objekten erfolgt
immer so, dass der Gesamtimpuls erhalten bleibt.
1 Erst
später berechnen wir das Ergebnis in dem wir Impuls- und Energieerhaltung berücksichtigen.
2.1. WECHSELWIRKUNG UND BEWEGUNG
2.1.3
5
Masse und Gewicht
Wenn die Schlitten nach dem Stoß fest zueinander koppeln gilt :
Masse m0 mit
Geschwindigkeit v0
Masse m0 +M mit
Geschwindigkeit v f
Masse M in
Ruhe
VORHER
NACHHER
)
m0 v0 = (m0 + M )vf
M = m0 (
v0
vf
(2.3)
1)
Die Bedeutung von ) ist "impliziert dass".2 Mit Hilfe der Gleichung (2.3) können wir
im Prinzip die Größe einer Masse M relativ zu einer Standardmasse m0 bestimmen. Die SI
Einheit für Masse ist das Kilogramm, abgekürzt kg , siehe Appendix A.
In der Physik wird die Masse über den Impuls definiert.
f = final
Frage: Warum sollten wir die Masse nicht mit einer Waage bestimmen?
! Gewicht ist nicht gleich Masse. Masse ist eine intrinsische (spezifische) Eigenschaft eines
Objektes, eines Teilchens. Gewicht ist ein Maß für die Stärke des Gravitationsfeldes an dem
Ort an dem sich die Masse befindet. Gewicht ist die Stärke der Kraft die durch Gravitation
auf eine Masse ausgeübt wird.
Gewicht und Masse sind unterschiedliche Ideen in der Physik. Es gibt keinen Grund von
vornherein zu vermuten, dass die beiden Größen miteinander zu tun haben. Es stellt sich
allerdings heraus, dass an einem bestimmten Ort (im Gravitationsfeld) das Gewicht immer
streng proportional zur Masse ist. Deshalb entspricht ein Vergleich zweier Gewichte am
gleichen Ort auch einem Vergleich der beiden Massen (Balkenwaage).
2.1.4
Richtung des Impulses
In unseren Experimenten verwendeten wir den Impuls bisher als skalaren Betrag. Im folgenden Experiment ist Richtung des Impulses (das Vorzeichen des Impulsvektors) des kleineren
Wagens zu beachten.
Masse m mit
Geschwindigkeit v
Masse 2m in
Ruhe
Masse m mit
Geschwindigkeit -vê3
VORHER
Masse 2m mit
Geschwindigkeit 2vê3
NACHHER
Wir schließen daraus, dass ein Vektormodell für die Erhaltung des Impulses notwendig ist.
Vor dem Stoß hat der linke Schlitten den Impuls p~1 = m~v , der rechte hat p~2 = 0. Nach
dem Stoß hat der linke Schlitten den Impuls p~1 0 = m~v /3 und der rechte Schlitten hat den
Impuls p~2 0 = +4 m~v /3.
Diese Impulse tragen wir im Bild explizit ein:
2 Um
die rechte Gleichung in (2.3) zu erhalten dividieren wir durch vf .
absolute value
6
KAPITEL 2. IMPULSERHALTUNG
Masse m mit
Impuls mv
Masse 2m mit
Impuls 0
Masse m mit
Impuls -mvê3
p1
Masse 2m mit
Impuls +4mvê3
p1'
VORHER
p2'
NACHHER
Es gilt also
p~1 + p~2
m~v + 0
=
=
p~1 0 + p~2 0
m~v /3 + 4m~v /3
(2.4)
p1
p1'
p2'
Die Impulsänderung des ersten Schlittens ist
gleich 4m~v /3, des zweiten Schlittens +4m~v /3.
! Bei einer Wechselwirkung ist die Änderung der Impulse der
beiden wechselwirkenden Objekte entgegengesetzt gleich groß.
2.1.5
Transfer von Impuls bei einer Wechselwirkung
Eine physikalische Wechselwirkung beschreibt den Vorgang, dass zwei Objekte aufeinandertreffen und sich gegenseitig ihren Impuls verändern. Das Wort aufeinandertreffen kann hier
den umgangssprachlichen Fall eines physischen Kontaktes beschreiben, z.B. den Stoß zweier Billardkugeln. Das Wort kann aber auch eine Fernwechselwirkung beschreiben, z. B. ein
Raumschiff gelangt in das Gravitationsfeld eines Planeten oder ein Teilchen mit elektrischer
Ladung tritt in ein magnetisches (elektrischen) Feld ein.3
Im Beispiel Oben beobachten wir, dass die Wechselwirkung beim elastischen Stoß zum
ursprünglichen Impuls jedes Schlittens den Betrag 43 mv0 addiert, aber in jeweils unterschiedlicher Richtung. Die Wechselwirkung gibt jedem Schlitten einen zusätzlichen aber jeweils
gegenläufigen Impuls. ! Damit bleibt der Gesamtimpuls erhalten.
Masse m mit
Impuls mv
Masse 2m mit
Impuls 0
linker
Schlitten
rechter
Schlitten
p1
Impuls
VORHER
VORHER
Masse m mit
Impuls -mvê3
Masse 2m mit
Impuls +4mvê3
p1'
p2'
NACHHER
Impulsübertrag durch
WECHSELWIRKUNG
Impuls
NACHHER
Geschwindigkeit
NACHHER
3 In diesen Fällen ist das gegenseitig nicht unbedingt einsichtig, da die Partner, also der Planet bzw. der
Magnet so große Masse besitzen, dass sich deren Impulsänderung nicht in eine namhafte Geschwindigkeitsänderung übersetzt.
2.2. KINEMATIK VON TEILCHEN UND SYSTEMEN AUS TEILCHEN
2.2
7
Kinematik von Teilchen und Systemen aus Teilchen
Kinematik befasst sich mit der Beschreibung der Bewegung eines Teilchens oder eines Körpers in Raum und Zeit, ohne die Ursachen der Bewegung (Kräfte) zu betrachten.
2.2.1
Position, Geschwindigkeit und Impuls
Im einfachsten Fall nehmen wir als Objekt eine punktförmige Masse.
Ihr Ortsvektor ~r = {x, y, z} gibt die Position des Massepunktes in einem rechtshändigen
Koordinatensystem an. Der Abstand des Objektes vom Ursprung ist
r = |~r| =
p
(2.5)
x2 + y 2 + z 2 .
Die Bahnkurve beschreibt die Bewegung des Objektes in
Raum und Zeit (t)
(2.6)
~r(t) = {x(t), y(t), z(t)} .
Z
t+Dt
”rHtL
t
t-Dt
zHtL
Y
xHtL
yHtL
X
Der Geschwindigkeitsvektor des Objektes zu einer bestimmten Zeit sei ~v = ~v (t).
Zur einfacheren Schreibweise lassen wir die explizite Zeitabhängigkeit (t) in der Folge weg.
Die Definition des Geschwindigkeitsvektors ist
2
3
2
3 2
3
vx
dx
dx/dt
d~r
1
4 vy 5 ⌘
4 dy 5 = 4 dy/dt 5
~v ⌘
also
(2.7)
dt
dt
v
dz
dz/dt
velocity
z
Der Betrag der Geschwindigkeit ist
v = |~v | =
q
vx2 + vy2 + vz2 .
Die Definition des Impulses ist
2
p~ ⌘ m ~v
oder
px
(2.8)
3
2
m vx
3
4 p y 5 ⌘ 4 m vy 5 .
pz
Der Betrag des Impulses ist p = |~
p| =
q
m vz
momentum
(2.9)
p2x + p2y + p2z = m v.
Beispiele:
1. Rechenbeispiel Ein Objekt der Masse m =2 kg bewegt sich in einer Zeitspanne von
0.25 s um 4 m nach Osten, 1 m nach Süden und 0.1 m nach Oben relativ zur Erdoberfläche.
a) Wie groß sind die Komponenten der Geschwindigkeit des Körpers ?
b) Wie groß ist der Betrag seiner Geschwindigkeit, seines Impulses ?
2. Geradlinige Bewegung in der x y - Ebene
vx und vy hängen nicht von der Zeit ab. Damit sind die Geschwindigkeit und der Impuls des
Teilchens konstant
~r(t) = {vx t, vy t, 0} .
(2.10)
8
KAPITEL 2. IMPULSERHALTUNG
4s
3s
2s
5
1s
0
0s
0
2s
5
0
1
2
3
Zeit HsL
3s
10
4
4s
Weg yHtL HmL
10
Weg yHtL HmL
Weg xHtL HmL
4s
5s
1s
0
2
3
Zeit HsL
1
vy =3mês
2s
5
0s
0
3s
10
4
1s
vx =2mês
0s
5
10
Weg xHtL HmL
0
3. Überlegung zur gleichförmigen Kreisbewegung
Ein Objekt bewegt sich mit konstantem Geschwindigkeitsbetrag auf einer kreisförmigen
Bahn. Das Zentrum des Kreises liegt fest auf der Erde.
a) Ist der Geschwindigkeitsvektor des Objektes konstant?
b) Ist sein Impulsvektor konstant?
Mit gleichförmiger Kreisbewegung bezeichnen wir den Fall konstanter Winkelgeschwindigkeit ! und konstantem Radius R. Formal schreiben wir
(2.11)
~r(t) = R {cos (! t), sin (! t), 0} .
mechanischer Sinus
Das Argument einer trigonometrischen Funktion, hier ! t, ist immer dimensionslos und gleich
der Bedeutung Radian, dem Verhältnis der Sehnenlänge s zum Radius R. Gleichung (2.11)
beschreibt eine Bahnkurve in der x y Ebene.
1.0
1.0
0.5
0.5
xHtL, yHtL
yHtL
yHtL
0.0
-0.5
-0.5
-1.0
-1.0
-1.0 -0.5
!
0.0
0.0
xHtL
0.5
1.0
xHtL
0
1
2
3 4
time
5
6
7
Wie schreibt sich Gleichung (2.11)
a) für eine Kreisbahn in der x-z Ebene ?
b) für eine Bahn die zur x- und z-Achse um 450 geneigt ist?
5. Komplizierte Bahnkurve:
Mondbewegung aus der Sicht der Sonne
(nicht maßstabsgetreu gezeichnet).
Experimente zur Messung der Geschwindigkeit:
2.2.2
rigid body
(A22, A24.6)
Systeme von Teilchen
Einen starren4 Körper dürfen wir uns als eine Ansammlung von Teilchen vorstellen, jedes
4 starr bedeutet hier, dass Wechselwirkungen des Körpers mit seinem Umfeld die geometrische Form des
Körpers nicht verändern.
2.2. KINEMATIK VON TEILCHEN UND SYSTEMEN AUS TEILCHEN
9
mit seiner bestimmten Masse, angeordnet an festen Raumpositionen. Damit beschreiben wir
das Volumen V des Körpers als Summe kleiner Volumenelemente Vi mit der Masse mi
und die Gesamtmasse M als Summe dieser Masseelemente,
X
X
V =
Vi
M=
mi
(2.12)
i
i
Die Dichte eines Volumenelementes ( Dimension: kg/m3 ) ist der Quotient
m
=
V
⇢=
m
x y z
(2.13)
Damit ist die Gesamtmasse des Körpers
X
⇢i Vi
M=
z
(2.14)
i
Für
Vi ! 0 erhalten wir die Integraldarstellung
Z
V =
dV
(2.15)
V
Z
M =
⇢ dV
(2.16)
!y
!z
!x
V
x
In kartesischen Koordinaten ist das Volumenelement dV = dx dy dz.
Im Fall homogener Dichte gilt M = ⇢ V .
2.2.3
Schwerpunkt eines Systems von Teilchen
Die Koordinaten des Schwerpunktes eines Körpers, den wir uns aus kleinen Masseelementen
aufgebaut vorstellen, ermitteln wir aus
P
~ri mi
1 X
~rS = Pi
=
~ri mi
(2.17)
mi
M i
i
oder
2
3
0 2
3
2
3
2
3
1
xS
x1
x2
x3
1
4 yS 5 =
@m1 4 y1 5 + m2 4 y2 5 + m3 4 y3 5 + ...A
M
zS
z1
z2
z3
(2.18)
Beispiele zur Berechnung des Schwerpunktes:
1) Zwei Massen (m1 und m2 ), sind durch einen gewichtslosen Balken der Länge ` verbunden. Der Balken liegt entlang der x-Achse, die Masse m1 bei {0, 0, 0}, die zweite Masse bei
{`, 0, 0}. Der Schwerpunkt des Objektes liegt bei
z
m1
2
y
~rS = 4
!
S
m2
x
m2 `
m1 +m2
0
0
3
5
Experiment mit Besen
center-of-mass
CM
10
KAPITEL 2. IMPULSERHALTUNG
2) Schwerpunkt des Wassermoleküls. Das Sauerstoffatom hat die atomare Masse 16 amu, das Wasserstoffatom die atomare Masse 1 amu. Der Schwerpunkt
liegt auf der Symmetrieachse nahe dem Sauerstoffkern.
+
104.450
4) Schwerpunkt einer homogen gefüllten Halbkugel mit dem Radius R. Der Ursprung der Kugel liegt
bei {0, 0, 0}. In diesem Fall muss der Schwerpunkt auf
der z-Achse liegen. Zur Integration verwenden wir Kugelkoordinaten, siehe Appendix B. Wir erhalten
zS
=
3
R.
8
96 pm
z
S
x
y
5) Schwerpunkt bei inhomogener Dichte In diesem Fall müssen wir die Dichtevariation
im Raum bei der Integration berücksichtigen
Z
1
~r ⇢(~r) dV .
(2.19)
~rS =
M V
Experiment zum Schwerpunkt :
2.2.4
(A72.2)
Bewegung des Schwerpunktes
Die Geschwindigkeit des Schwerpunkts ist
d~rS
1 X
= ~vS =
~vi
dt
M i
mi =
1 X
1 ~
p~i =
P.
M i
M
(2.20)
Der Gesamtimpuls aller Teilchen ist die Summe der linearen Impulse aller Teilchen,
X
P~ =
p~i = M~vS .
(2.21)
i
In einem abgeschlossenen System (keine Wechselwirkung) ist der Gesamtimpuls P~ konstant.
) In einem abgeschlossenen System ist die Schwerpunktsgeschwindigkeit zeitlich konstant.
Die Bewegung des Schwerpunktes beschreibt nur eine der möglichen Bewegungsformen eines
Körpers. Später behandeln wir Drehungen der Masselemente um den Schwerpunkt.
Experiment zur Schwerpunktsbewegung zweier Luftkissenfahrzeuge :
(A71.3)
Rechenbeispiel zur Impulserhaltung bei Wechselwirkung mit der Erde :
Wenn ein 70 kg schwerer Mensch von einem Stuhl aus 1 m Höhe auf die Erde springt, dann trifft er
mit dem Impuls 310 kg m/s auf die Erde. Wir nehmen an, dass sich Erde und Mensch gemeinsam
weiterbewegen, wie die starren Schlitten im Bild rechts oben auf Seite 5. Die Masse der Erde ist
M = 6 ⇥ 1024 kg.
- Wie groß ist die Geschwindigkeit der Erde nach dem Aufprall?
- Wie lange braucht es bis sich die Erde in der Folge um einen mm bewegt hat ?
- Welche Gründe gibt es dafür, dass sich die Erde noch langsamer bewegt?
Kapitel 3
Energieerhaltung
Die Bedeutung der Erhaltung der Energie wurde erst Mitte des 18. Jhdt erkannt. Zu dieser
Zeit wurde der Zusammenhang zwischen dem Wärmeinhalt eines Objektes und der Reibung
ersichtlich und der Begriff Thermodynamik (Wärmelehre) entstand.
Energie erscheint in vielen Formen, kinetische Energie, chemische Energie, elektrische
Energie, magnetische Energie, thermische Energie, nukleare Energie, Ruheenergie, potentielle Energie. Streng genommen kann man alle diese Energieformen zwei Darstellungen zuordnen: Bewegungsenergie und potentielle Energie. Bewegungsenergie stellen wir als kinetische
Energie dar. Die potentielle Energie eines Körpers (eines Teilchens) stellt die Möglichkeit
dar auf Grund einer bestehenden Wechselwirkung den Bewegungszustand zu ändern oder
umgekehrt: die Unmöglichkeit den Bewegungszustand zu ändern, ebenfalls auf Grund einer
Wechselwirkung. Streng gilt, dass sich die Summe aller Energien nicht ändert.
Die Definitionen für kinetische und potentielle Energie entstanden aus der Beobachtung
der Umwandlung von kinetischer in potentielle Energie (und umgekehrt) bei einer Pendelschwingung.
3.1
Definitionen zur Energie
Differenz der potentiellen Energie
an zwei unterschiedlichen Positionen einer schweren Masse im Gravitationsfeld der Erde
V (z1 )
V (z2 ) = mg(z1
(3.1)
z2 ) .
Eine Differenz der potentiellen Energie kann für alle Kraftfelder definiert werden.
Kinetische Energie
Energieform, die in der Bewegung einer trägen Masse steckt:
K = m v 2 /2 .
(3.2)
Energiesatz Wir vergleichen ein Teilchen, das sich an zwei Positionen, z1 oder z2 befinden
kann und finden
K(z1 ) + V (z1 ) = K(z2 ) + V (z2 ) = const .
(3.3)
Bei Abwesenheit von Reibung (in einem konservativen Kraftfeld) ist die Summe aus potentieller und kinetischer Energie wie sie in (3.1) und (3.2) definiert wurden konstant.
11
12
KAPITEL 3. ENERGIEERHALTUNG
Mit diesen Definitionen können wir Beobachtungen zur Fallgeschwindigkeit nach verschiedenen Fallhöhen in einer Anordnung in der eine Stahlkugel über kleine Strecken fällt
erklären. Wir bestimmen die Endgeschwindigkeit für verschiedene Fallhöhen mit zwei Lichtschranken. Das Ergebnis tragen wir einmal linear und einmal quadratisch auf:
Endgeschwindigkeit gegen Fallhöhe
Quadrat der Endgeschwindigkeit
4
4
2
x
10
2
x
5
1
0
0.0
x2
3
fHxL
3
v2 Hm2ês2L
v HmêsL
15
1
0.2
0.4
0.6
Fallhöhe HmL
0.8
1.0
0
0.0
0.2
0.4
0.6
Fallhöhe HmL
0.8
1.0
0
0
1
2
x
3
4
Die Messpunkte können wir mathematisch analysieren. Zum Beispiel um den Zusammenhang (3.1) in Frage zu stellen. Warum nicht (z1 z2 )2 ? Wenn wir das Experiment mit
unterschiedlichen trägen Massen durchführen: Warum nicht m2 ? Warum überhaupt v n ?
Experimente: Kugel fällt, Kugel auf schiefer Ebene, Fallseil (A33.3, A33.4 A33.6)
3.1.1
Wechselwirkung und Energie
Vier Wechselwirkungen sind bekannt. Sie sind Ausdruck für den Impulsaustausch zwischen
Teilchen, die in einem gewissen Abstand liegen.
- Gravitation (langreichweitig, kann nicht abgeschirmt werden)
- Coulomb Wechselwirkung (langreichweitig, Ladungen können sich abschirmen)
- schwache + starke Wechselwirkung (auf Bereiche r 10
15
m beschränkt)
Jede der vier fundamentalen Wechselwirkungen können wir im Sinne einer Brücke mit Boten auffassen, die den Impulstransfer zwischen den Teilchen vermitteln. Veranschaulichen
können wir uns eine Wechselwirkung im folgenden Bild:
Wir beobachten aus großer Höhe zwei Eisläufer die sich abstoßen. In Wirklichkeit
werfen sie sich gegenseitig einen Medizinball zu. Diesen sehen wir aus großer Höhe aber nicht. Der Medizinball ist der Bote
der Wechselwirkung. Hier sinnbildlich für
einen abstoßende Kraftwirkung. Bei größerem Abstand können sie sich nur mehr kleinere Bälle zuwerfen - ein grobes Bild für die
Abstandsabhängigkeit.
Im rechten Bild tauschen zwei Elektronen
ein Photon aus, auch ein Bild für eine
abstoßende Wechselwirkung.
! "# $
$
$
!
$
$
% & ' ( $
3.1. DEFINITIONEN ZUR ENERGIE
13
Kontakt-Wechselwirkung : Der physikalische Kontakt und der mechanische Halt zwischen makroskopischen Objekten haben ihren Ursprung in der elektromagnetischen Wechselwirkung.1 Der Möglichkeit der Ladungsabschirmung und der Ausbildung von Ladungsdipolen kommt dabei eine ausgezeichnete Rolle zu. So ergeben sich für die Wechselwirkung zwischen zwei Atomen oder zwischen zwei Molekülen kompliziertere Ausdrücke für das
Wechselwirkungspotential. Deren Ursprung liegt immer in elektromagnetischen Effekten und
Quanteneffekten. Der klassisch logischen Auffassung, dass zwei massebehaftete Objekte nicht
am gleichen Ort sein können, wird durch die Kontaktwechselwirkung Rechnung getragen.
Gesamtenergie: Für die Gesamtenergie zweier wechselwirkender Teilchen im Abstand r12
schreiben wir allgemein :
(3.4)
E = K(1) + K(2) + V (r12 ) .
Für die Gesamtenergie mehrerer wechselwirkender Teilchen :
E = K(1) + K(2) + K(3) + .... + V (r12 ) + V (r13 ) + V (r23 ) + .... ,
(3.5)
müssen wir im einfachsten Falle mindestens mehrere Potentialterme der Form V (rij ) berücksichtigen. Der Ansatz (3.5) basiert auf der Annahme, dass nur Zweiteilchen-Wechselwirkungen
vorliegen.
Auf einer fundamentalen Ebene gibt es nur zwei Formen der Energie, die potentielle Energie
der Wechselwirkung und die kinetische Energie der miteinander wechselwirkenden Teilchen.
Damit dürfen wir argumentieren, dass die Gesamtenergie E immer erhalten ist. Es gibt keinen experimentellen Befund der eine Abweichung von diesem Befund anzeigt.
Der inneren Energie eines massebehafteten Objekts wird z.B. durch im Objekt enthaltene
thermische Energie Rechnung getragen. Die innere Energie findet sich in den potentiellen
und kinetischen Energien der Teilchen des Objektes und ihrer Anordnung zueinander. Bei
makroskopischen Objekten läuft die Summe in (3.5) über sehr viele Teilchen und deren im
Detail unbekannten (auch unbeobachtbare) Positionen.
Die physikalischen Einheiten für potentielle und kinetische Energie sind identisch. Aus der
Definition der kinetischen Energie haben wir:
K=
1
m v2
2
)
[K] = kg
m2
= J = Joule .
s2
(3.6)
Die Energieeinheit im SI System ist nach James Joule benannt. Joule hat wesentlich den
modernen Begriff der Energieerhaltung geprägt.
3.1.2
Beobachtungen zur potentiellen Energie
Dazu stellen wir Überlegungen zur Bestimmung der Gesamtenergie an. Obwohl die kinetische Energie in einem Inertialsystem fest bestimmbar ist, können wir nur Differenzen der
potentiellen Energie festlegen. Damit sind nur Differenzen der Gesamtenergie beobachtbar.
Der Nullpunkt der potentiellen Energie kann willkürlich festgelegt werden. Den Ausdruck
V (z1 )
V (z2 ) = mg(z1
z2 )
(3.7)
kann man über die Gleichung
V (z) = mgz + C
1 Im
(3.8)
Zusammenhang mit der räumlichen Stabilität von Objekten, die quantenmechanisch begründet ist.
14
KAPITEL 3. ENERGIEERHALTUNG
erfüllen, unabhängig davon welche Größe wir für die Konstante C wählen. Zum Beispiel
dürfen wir C = 0 definieren, dann wird Vz für negative Werte von z auch negativ. Damit
kann auch die Gesamtenergie negativ sein. Die kinetische Energie kann nur positive Werte
annehmen.
3.2
3.2.1
Funktionen potentieller Energie
Coulomb Wechselwirkung
Wir betrachten unbewegte Ladungen, q1 und q2 . Die Ladungseinheit geben wir in Coulomb
(C) an. Wenn sich diese beiden Ladungen im Abstand r befinden ist ihre potentielle Energie
V (r) = k
q1 q2
.
r
(3.9)
zwei Protonen
q1q2>0
VHrL=k
q1 q2
r
0
0
3.2.2
potentielle Energie VHrL
potentielle Energie VHrL
Die Coulomb-Konstante ist k = 8.99 ⇥ 109 J m C 2 . Da Ladungen Vorzeichen tragen ergibt
sich eine abstoßende Wechselwirkung für q1 q2 > 0, eine anziehende für q1 q2 < 0. In den
beiden folgenden Darstellungen zur potentiellen Energie zwischen zwei Ladungen haben wir
den Nullpunkt der potentiellen Energie bei unendlicher Entfernung zwischen den beiden Ladungen festgelegt. Für bewegte Ladungen tritt auch eine magnetische Wechselwirkung auf.
Diese beeinflusst aber die kinetische Energie nicht.
2
4
6
Abstand r
8
10
0
VHrL=k
q1 q2
r
Elektron und Proton
q1q2<0
0
2
4
6
Abstand r
8
10
Gravitationswechselwirkung
Obwohl die Graviationswechselwirkung, die bei weitem schwächste der vier fundamentalen
Wechselwirkungen ist, erscheint sie im alltäglichen Leben an vorderster Stelle. Grund dafür
ist, dass die Gravitation zwischen allen massebehafteten Teilchen wirkt und es keine negative
Masse gibt. Damit addieren sich die Effekte der Gravitation. Die Form der GravitationsWechselwirkung ist formal ähnlich dem Coulomb Gesetz (das Minus Zeichen beachten!)
V (r) =
G
m1 m2
r
(3.10)
wobei G die Gravitationskonstante ist. G ist die am wenigsten genau bekannte Naturkonstante, G = 6.67 ⇥ 10 11 J m kg 2 .
Eine wesentliche Vereinfachung in der Anwendung von (3.10) ergibt sich für sphärische
Objekte homogener Masseverteilung. Diese dürfen als punktförmige Teilchen mit der Gesamtmasse des Objektes behandelt werden, wenn der Abstand mit dem wechselwirkenden
Objekt größer ist als der Summe der Radien beider Objekte. Die Gravitation bestimmt ganz
wesentlich die Form aller Objekte, die größer sind als ein typischer Asteroid (Durchmesser
etwa 1000 km).
3.2. FUNKTIONEN POTENTIELLER ENERGIE
3.2.3
15
Gravitation in Erdnähe
Auf den ersten Blick erscheint Gleichung (3.10) völlig anders als der Ansatz potentieller
Energie in Gleichung (3.8) den wir empirisch gefunden haben. Ein Grund dafür ist der
Unterschied in der Definition der Potentialreferenz ein zweiter im Gültigkeitsbereich der
beiden Gleichungen. In (3.10) ist V (r) = 0 für r ! 1. Mit der Erdoberfläche als Bezugspunkt, r = rE = 6400 km haben wir für das Potential einer Masse m im Gravitationsfeld
der Erdmasse ME
V (r)
V (rE ) = V (r
rE ) =
G
mME
mME
+G
.
r
rE
(3.11)
Mit dieser Definition ist V (r = rE ) = 0. Jetzt führen wir die z Koordinate ein als Maß für
die Höhe über dem Erdboden, z = r rE , und schreiben
◆
✓
GME
GME
1
z/rE
=m
V (z) = m
1
(3.12)
rE
1 + (z/rE )
rE 1 + (z/rE )
Wenn z ⌧ rE ist dürfen wir im Nenner 1 + (z/rE ) ⇡ 1 setzen und erhalten
✓
◆
GME
V (z)bei r⇡rE = m
z = mgz .
2
rE
(3.13)
potentielle Energie VHrL
Gleichung (3.8) ist also die lineare Näherung zu (3.10). Eine graphische Erklärung der linearen Näherung zeigt die beiden Bilder. In unmittelbarer Umgebung von r = rE kann
der Potentialverlauf als lineare Funktion (3.13) genähert werden.2 Diese Näherung kann bei
jedem Abstand gemacht werden. Entsprechend ändert sich der Wert g in Gleichung (3.13).
VHzL = m g z
0
0
3.2.4
VHr-rE L = - G
bei
homogener
Dichte
2
Mm
Abstand r H 103 km L
4
6
8
10
r
12
+G
Mm
z
rE
r = rE
z=0
14
Potentielle Energie einer Feder
Experiment: quadratische Abhängigkeit der Federkraft (A....)
Die lineare Antwort der Dehnung einer Feder auf die
ausgeübte Kraft führt zur quadratischen Abhängigkeit der potentiellen Energie der Feder
Energie
1
VHzL = kS Hz-z0 L2
2
V (x) =
0
-2
2 Die
-1
0
z - z0
1
2
1
ks (z
2
zo ) 2
(3.14)
wobei ks die Federkonstante ist. Dieser Ausdruck
entspricht der linearen Näherung, er gilt für kleine
Auslenkungen.
graue Kurve zeigt den Potentialverlauf im Erdinneren unter Annahme homogener Dichte.
16
KAPITEL 3. ENERGIEERHALTUNG
3.2.5
Molekulare Potentialfunktion
potentielle Energie
1.0
UB
0.0
De
-0.5
-1.0
Diese Darstellung der potentiellen Energie zwischen
zwei Teilchen als Funktion des Abstandes R gilt stellvertretend für viele Fälle. Die Teilchen könnten Atome, Moleküle oder Oberfläche eines Festkörpers sein.
Der Gleichgewichtsabstand ist Re , die Bindungsenergie ist De , die Höhe der Potentialbarriere UB .
VHrL
0.5
Re
1
Abstand R H Å L
2
3
4
5
Im atomaren und molekularen Bereich verwendet man häufig als Energieeinheit das Elektronenvolt, 1 eV = 1.6 ⇥ 10 19 J . Als Anhaltspunkt nehmen wir die Bindungsenergie von
H2 ! H + H. Diese beträgt De = 4.5 eV. Für H2 ist Re = 1.1 Å, im tiefsten Energiezustand
ist UB für H2 gleich Null.
3.2.6
Anwendungsbeispiele
1) Fusion: Zwei Deuteronen nähern sich bis auf einen Abstand von r = 1.5 fm und verschmelzen zu einem Helium Atomkern. Wie groß muss die Geschwindigkeit der beiden Atome
sein, damit sie sich auf diese Distanz nähern können? Ein Deuterion besteht aus einem Proton
das mit einem Neutron gebunden ist. Seine Masse ist m ⇡ 2mp , wobei mp = 1.67 ⇥ 10 27 kg
die Masse des Protons ist. Die Elementarladung des Protons beträgt q = 1.6 ⇥ 10 19 C.
1
1
qq
m v2 + m v2 = k
2
2
r
)
v = 6.7 ⇥ 106 m/s = 0.023 c
c = 3 ⇥ 108 m/s ist die Lichtgeschwindigkeit. Bei einem zentralen Stoß mit Geschwindigkeiten > 2.3 % von c könnten die Deuteronen fusionieren.
2) Fluchtgeschwindigkeit: Welche Startgeschwindigkeit braucht eine reibungsfreie Rakete
um das Gravitationsfeld der Erde zu verlassen? Wir verwenden als Erdradius RE = 6400 km,
als Erdmasse ME = 6 ⇥ 1024 kg.
1
2
m vflucht
2
G
ME m
rE
)
0
vflucht
11.2 km/s .
3) Feder: Ein Kind sitzt auf einer gespannten Feder. Die Feder ist um 50 cm kürzer als ihre
Länge im entspannten Zustand. Läßt man die Feder los, fliegt das Kind bis zu einer Höhe
von zf = 4 m. Die Masse des Kindes ist m = 20 kg. Wie groß ist die Federkonstante? Wir
nehmen an, dass die gesamte potentielle Energie der Feder in kinetische Energie des Kindes
umgesetzt wird.
1
ks (z
2
z0 ) 2 ⇡ m g z f
)
2
ks ⇡ 3139 J/m .
3.3. ENERGIETRANSFER
3.3
17
Energietransfer
3.3.1
Impuls und kinetische Energie
Wichtigster Aspekt einer Wechselwirkung zwischen zwei Teilchen ist die Möglichkeit ihre
Bewegung durch Impulstransfer zu beeinflussen. Die Newtonschen Definitionen von Impuls
und kinetischer Energie sind
p~ = m~v
und
K=
1
m v2 .
2
(3.15)
Mit p = |~
p| ist der Zusammenhang zwischen kinetischer Energie und Impuls
K=
p2
.
2m
(3.16)
Jetzt untersuchen wir den Einfluss einer Impulsänderung des anfänglichen Vektors p~ um einen kleinen Wert
d~
p. Diese Änderung erfolgt in einem kurzen Zeitabschnitt dt. Der neue Wert des Impulses ist dann p~f =
p~ + d~
p mit dem Betragsquadrat
p2f
2
2
= | p~ + d~
p | = p + 2p dp cos ✓ + dp
p f =p+dp
wobei wir den Cosinussatz verwendet haben.
✓ ist der Winkel zwischen den Vektoren p~ und d~
p.
Damit ergibt sich eine Änderung in der Energie des Teilchens um
dK = Kf
K=
p2f
2m
dp
2
p2
2p dp cos ✓ + dp2
=
.
2m
2m
q
p
(3.17)
Wenn das Zeitintervall dt sehr kurz ist dann ist auch dp sehr klein, sodass der quadratische
Ausdruck dp2 in (3.17) vernachlässigt werden darf3 und wir erhalten
dK =
p
dp cos ✓ = v dp cos ✓ .
m
(3.18)
Dieser Ausdruck entspricht dem Skalarprodukt
dK = ~v · d~
p.
dot product
(3.19)
Wenn die Impulsänderung d~
p parallel (anti-parallel) zum Geschwindigkeitsvektor liegt,
dann erhöht (erniedrigt) sich die kinetische Energie.
Liegt die Impulsänderung d~
p senkrecht zum Geschwindigkeitsvektor,
dann ändert sich die kinetische Energie nicht.
dK ist ein Energietransfer auf Grund einer Wechselwirkung, die mit dem Impulstransfer
d~
p verbunden ist. Der Ausdruck (3.19) wird oft mit Arbeit bezeichnet. Die Energieänderung
dK erfolgt immer zu Kosten einer Änderung der potentiellen Energie der Wechselwirkung.
3 Dies
gilt nur wenn dp2 ⌧ p dp ist, also nicht in unmittelbarer Umgebung von p = 0.
18
KAPITEL 3. ENERGIEERHALTUNG
3.3.2
Kontaktwechselwirkung
Normalkomponente
kt WW
lift drag
Reibungsterm
Konta
Wir zerlegen die Kontaktwechselwirkung unseres Schlittens
in eine Kraftkomponente senkrecht zum Tisch (Normalkomponente, die verhindert, dass der Schlitten im Tisch einsinkt)
und einen Reibungsterm parallel zur Tischoberfläche, der
sich der Bewegung des Schlittens widersetzt (~v parallel zur
Tischoberfläche). Für die Komponente senkrecht zum Tisch
gilt dK = ~v · d~
p = 0, der Schlitten wird getragen, seine
kinetische Energie ändert sich nicht. Ohne den Reibungsterm
ist unser Schlitten als ein isoliertes (abgeschlossenes) System.
Übertragen auf ein Flugzeugprofil gilt eine analoge Aufteilung der Kontaktwechselwirkung
mit der Luft. Man unterscheidet die beiden Anteile Auftrieb und Strömungswiderstand.
3.3.3
Impuls, Kraft und Energie
Zu Beginn haben wir die Kraft etwas informell als Zug oder Schub eingeführt. Jetzt geben
wir eine physikalische Definition:
Die Kraft ist die Rate mit der eine Wechselwirkung Impuls überträgt,
d~
p
F~ ⌘
.
dt
(3.20)
Hier ist d~
p der kleine Impulsübertrag der in der kurzen Zeit dt stattfindet.4
Gleichung (3.20) definiert auch die SI-Einheit für Kraft
[F ] = 1 kg m s
2
(3.21)
= 1 Newton = 1 N .
Mit (3.20) können wir den Energieübertrag (3.19) umschreiben5 ,
d~r
d~
p
· d~
p = d~r ·
= d~r · F~ = F~ · d~r
(3.22)
dt
dt
Wiederum haben wir das Skalarprodukt zweier Vektoren. Mit Hilfe von (3.22) können wir
das Kraftgesetz für die Gravitation in Erdnähe herleiten: Hier gilt für die Änderung der
potentiellen Energie
dK
= ~v · d~
p=
(3.23)
dV = m g dz ,
und für die Änderung der kinetischen Energie einer Masse m,
dK = F~ · d~r = Fx dx + Fy dy + Fz dz = Fz dz .
(3.24)
Fz =
(3.25)
Energieerhaltung bedeutet, dass die Summe der beiden Änderungen gleich Null ist, also
dK + dV = 0. Daraus folgt
mg.
Gleichung (3.20) läßt sich auch schreiben als
d~
p = F~ dt
oder
p~ = F~
Wenn eine Kraft F~ über eine Zeit
4
(3.26)
t.
t wirkt ändert sich der Impuls um
p~.
Was bedeutet hier klein und kurz : In der kurzen Zeit dt ändert sich die Richtung und Größe des kleinen
Impulses d~
p nicht.
5 Warum dürfen wir den Schritt vom schwarzen zum roten Ausdruck in (3.22) machen? Weil wir im
p d~
p
p
r
r d~
Skalarprodukt, d~
· d~
p = d~
· dtp dt = d~
· dtr dt = d~
· d~
r = d~
r · d~
, die Reihenfolge vertauschen dürfen.
dt
dt
dt
dt
dt
3.4. ROTATIONSENERGIE
3.4
19
Rotationsenergie
Wir betrachten zwei gleich schwere Massen, ein Quader gleitet, ein Zylinder rollt auf einer
schiefen Ebene. Welches Objekt kommt schneller an, welches hat am Ende die höhere Geschwindigkeit ?
Zylinder mit Masse m
Objekt mit Masse m
h
h
v
v
Wenn die Unterlage als fast 6 reibungsfrei angenommen wird, kommt der Quader zuerst an.
Ursache dafür ist die partielle Umwandlung der potentiellen Energie V = m g h in Rotationsenergie des Zylinders. Diese Energie fehlt der kinetischen Energie des Zylinders.
Um diesen Umstand näher zu betrachten müssen wir Größen für die Drehbewegung des
Körpers definieren. Dazu dient das Winkelmaß und als Maß für die Rate der Drehung die
Winkelgeschwindigkeit.
3.4.1
Winkel und ihre Messung
Zur Beschreibung einer Drehung um einen Punkt P verwenden wir das Bogenmaß als Winkeleinheit. Das Bogenmaß ist definiert als das Verhältnis von Länge des Kreisbogens (s)
zu seinem Radius (r).
r
q
P
P
q
s
|✓| =
s
r
Der Winkel für den s = r ist definiert die Einheit 1 Radiant= 1 rad.
Der Kreisumfang ist 2r⇡. Also gehört zum Winkel 360o das Bogenmaß 2⇡,
1 Rad =
3.4.2
360
= 57o 170 34“ .
2⇡
radian
(3.27)
Winkelgeschwindigkeit
Bei der Definition der linearen Geschwindigkeit verwenden wir die Strecke ds die in der in
der Zeiteinheit dt zurückgelegt wird. Analog zur Geschwindigkeit gilt für die Teilchengeschwindigkeit auf einer Kreisbahn,
v=
ds
d✓
=r
= r!.
dt
dt
(3.28)
Die skalare Definition ! = v/r gibt den Betrag der Winkelgeschwindigkeit. Die Anzahl der
!
Umdrehungen pro Sekunde finden wir über die Definition einer Frequenz f = 2⇡v r = 2⇡
.
Um auch die Drehrichtung in die Winkelgeschwindigkeit einzubeziehen definiert man mit
der "Rechten Hand Regel" das Kreuzprodukt
6 Wenn
die Unterlage wirklich reibungsfrei wäre, dann käme der Zylinder nicht ins Rollen!
cross product
20
KAPITEL 3. ENERGIEERHALTUNG
~v =
~r ⇥ !
~
bzw. ~v = !
~ ⇥ ~r
bzw. ~r ⇥ ~v = r2 !
~.
(3.29)
Der Ausdruck rechts folgt aus der Beziehung ~c ⇥ ( ~a ⇥ ~b ) = ( ~c · ~b ) ~a
( ~c · ~a ) ~b .
ds=r dq
dq
r
w
v
r
qHtL
qHtL
Die Definition der Winkelgeschwindigkeit folgt auch aus einer Betrachtung der Bewegung
des starren Körpers. Wir hatten auf Seite 8 eingeführt, dass die Schwerpunktgeschwindigkeit
eines Körpers in einem abgeschlossenen System zeitlich konstant ist. Die Masseelemente mi
des Körpers haben die Ortsvektoren ~riS = ~ri ~rS . Für den starren Körper gilt |~riS | = const.,
2
also auch ~riS
= const. Damit ist die zeitliche Ableitung dieser Größe gleich Null,
2
d~riS
/dt = 2 ~riS ·
d~riS
= 2 ~riS · ~viS = 0 .
dt
(3.30)
Wenn dieses Skalarprodukt gleich Null ist, liegt die Relativgeschwindigkeit ~viS immer senkrecht zu ~riS . Daher ist im
Schwerpunktsystem eines starren Körpers die einzig mögliche Bewegung eines Elementes eine Drehung mit der Winkelgeschwindigkeit !
~viS = !
~ ⇥ ~riS .
w
S
”r
S
”r
iS
”r
i
v”iS
mi
(3.31)
Relativ zum Koordinatenursprung bewegt sich das Masseelement mit
~vi = ~vS + ~viS = ~vS + (~
! ⇥ ~riS ) .
degrees of
freedom
(3.32)
! Die Bewegung eines starren Körpers lässt sich immer zusammensetzen als
Translation des Schwerpunktes und Rotation des Körpers um den Schwerpunkt.
Ein freier starrer Körper hat 6 Freiheitsgrade: drei in der Translation des Schwerpunktes
und drei der Rotation um den Schwerpunkt.
3.4.3
Trägheitsmoment
Mit (3.32) können wir die kinetische Energie eines sich drehenden starren Objekts angeben.
Zuerst halten wir den Schwerpunkt des Körpers im Raum fest, damit steckt die gesamte
kinetische Energie in der Drehbewegung um die raumfeste Achse. Die Rotationsenergie ist
die Summe der kinetischen Energien der an der Rotation beteiligten Massen mi ,
"N
#
N
N
1X
1X
1 X
rot
2
2 2
2
K =
mi viS =
mi ri ! =
mi r i ! 2 .
(3.33)
2 i=1
2 i=1
2 i=1
moment of
inertia
Der Klammerausdruck ist das Trägheitsmoment bezüglich dieser Drehachse,
3.4. ROTATIONSENERGIE
I=
N
X
mi ri2 =
i=1
Z
r2 ⇢ dV ,
21
(3.34)
wobei ri den Normalabstand des Masseelementes zu dieser Achse angibt. Damit gilt für die
kinetische Energie der Rotation
K rot =
1
I !2 .
2
(3.35)
Zur Rotationsenergie addieren wir die kinetische Energie die in der Translation des Schwerpunktes steckt, K S = 12 M |~vS |2 . Für die gesamte Bewegungsenergie eines starren Körpers
(Energie in Translation und Rotation) gilt also
K = K S + K rot =
1
1
M vS2 + I! 2 .
2
2
(3.36)
Beispiele zur Berechnung des Trägheitsmomentes:
1) Vier gleiche Massen an den Eckpunkten eines Rechtecks mit den Seitenlängen 2a und
2b. Für die drei orthogonalen Achsen gilt
Ix
=
4ma2
=
4mb2
Iz
=
4m(a2 + b2 )
Iy
Allgemein gilt für flache Objekte,
die in der x-y Ebene liegen: Iz = Ix + Iy .
2) Hohlzylinder der Höhe h mit Radius R und der
Masse M . Ein einfacher Ausdruck ergibt sich nur für
das Trägheitsmoment bezüglich der Zylinderachse,
I3 = M R 2 .
3) Vollzylinder der Höhe h mit Radius R und der Masse M . Auch hier ergibt sich ein einfacher Ausdruck nur
für das Trägheitsmoment bezüglich der Zylinderachse,
I3 = M R2 /2 .
4) Vollkugel mit Radius R und der Masse M . Für jede beliebige Achse durch das Kugelzentrum gilt7
I = 2M R2 /5 .
7 Herleitung: Der Abstand eines Volumenelementes von der Achse beträgt a = r sin ✓, die Masse der
Kugel ist M = ⇢ 4⇡R3 /3.
Z
Z
Z R
Z ⇡
I =
a2 ⇢ dV = ⇢ r 4 sin3 ✓ dr d✓ d' = ⇢ 2⇡
r4 dr
sin3 ✓ d✓
r=0
✓=0
Z ⇡
1
1
4
2
= ⇢ 2⇡ R5
sin3 ✓ d✓ = ⇢ 2⇡ R5 = M R2
5
5
3
5
✓=0
22
KAPITEL 3. ENERGIEERHALTUNG
5) Zweiatomiges Molekül: Zwei Atommassen m1 und m2 befinden sich im Abstand R.
Der Abstand der Masse m1 vom Schwerpunkt beträgt m2 R/(m1 + m2 ), der Abstand der
Masse m2 vom Schwerpunkt beträgt R m2 R/(m1 + m2 ). Das Trägheitsmoment ist damit
I = m1 (
reduced mass
m2 R 2
) + m2 (R
m1 + m2
m2 R 2
m1 m2
) =
R2 = µ R2
m1 + m2
m1 + m2
(3.37)
wobei µ die reduzierte Masse ist. Aus einer experimentellen Beobachtung8 von I lernt man
aus dieser Beziehung den Molekülabstand (typisch ist R ⇡ 0.1 nm).
6) Steinerscher Satz: Wenn sich ein Körper um die Achse A
dreht, die nicht durch den Schwerpunkt geht, ist das Trägheitsmoment um diese Achse IA gleich dem Trägheitsmoment um
die durch den Schwerpunkt parallele Achse IS , plus dem Trägheitsmoment der im Schwerpunkt vereinigten Gesamtmasse M
bezüglich A (a ist der Abstand der Achsen).
IA = IS + a2 M .
(3.38)
Experimente zum Trägheitsmoment und Rollbewegung (A56.1, A56.2 A56.3 A52.1)
Haupträgheitsachsen (oder Trägheitshauptachsen) : Hauptachsen stehen immer senkrecht
aufeinander und verlaufen immer durch den Schwerpunkt eines Körpers. Wenn ein Körper
nicht rotationssymmetrisch ist gibt es nur eine einzige Kombination der drei Hauptachsen.
Das Trägheitsmoment eines Körpers um eine beliebige Achsenkombination {~ex , ~ey , ~ez } ist
durch den Trägheitstensor (hier geschrieben für eine Ansammlung von Massepunkten mi )
I=
X
i
0
yi2 + zi2
@
yi x i
mi
zi x i
x i yi
x2i + zi2
zi y i
1
x i zi
y i zi A
2
xi + yi2
IHA =
X
i
0
yi2 + zi2
@
0
mi
0
0
x2i + zi2
0
1
0
A
0
2
2
x i + yi
definiert. Für Hauptachsen (HA) ist der Tensor diagonal. Dreht sich der Körper nicht um
eine Hauptträgheitsachse, so zeigt der Drehimpuls nicht in Richtung der Drehachse. Daher
bleibt die momentane Drehachse nicht fest im Raum, sondern läuft auf der Oberfläche des
sog. Rastpolkegels um die Drehimpulsachse herum.
3.4.4
Rollbewegung ohne Schlupf
Ein starrer Körper rollt ohne Schlupf auf einer festen Unterlage.
Seine Schwerpunktsgeschwindigkeit ist ~vS . Ein Masseteilchen
A am Umfang der Rolle am Aufpunkt bewegt sich mit der Row
tationsgeschwindigkeit ~uA . Gemäß (3.33) ist diese GeschwinuB
digkeit dem Betrag nach gleich |~uA | = R !. Wenn kein Schlupf
R
vorliegt, wechselt der Punkt an dem die Unterlage berührt wird
vS
mit der Geschwindigkeit des Schwerpunktes, sodass
uA
friction
|~vS | = R ! .
(3.39)
Bei Anwendung auf eine Kugel auf einer schiefen Ebene stellt sich die Frage: Würde die Kugel in Abwesenheit von Reibung zu Rollen beginnen?
8 Mit
Hilfe der Rotationsspektroskopie, oder rotationsaufgelöster Spektroskopie.
3.4. ROTATIONSENERGIE
23
Beispiel: Ein Zylinder der Masse M mit Radius R rollt praktisch reibungsfrei über den rechts gezeichneten Weg. Zu Beginn
ist der Zylinder im labilen Gleichgewicht, eine infinitesimale
Kraftübertragung bringt ihn zum Rollen nach rechts. Am Ende des Weges kommt er 10 Meter tiefer an und rollt horizontal
weiter. Wir suchen vS und !. Wegen Energierhaltung gilt
z HmL
10
1
1
M vS2 + I! 2
2
2
M gh =
0
0
wobei I = 12 M R2 . Gemäß (3.39) gilt ! = vS /R, damit sind vS
und ! berechenbar.
3.4.5
5
2
4
x HmL
6
8
Impuls- und Energieerhaltung beim elastischen Stoß
Jetzt können wir Energie und Impulserhaltungssatz kombinieren, um jeden beliebigen elastischen Stoß unserer Schlitten zu behandeln. Wir nehmen wieder das Beispiel von Seite 6.
Masse m mit
Impuls mv
Masse 2m mit
Impuls 0
Masse m mit
Impuls -mvê3
p1
Masse 2m mit
Impuls +4mvê3
p1'
VORHER
p2'
NACHHER
Es gilt der Impulserhaltungssatz,
p~1 + p~2
p~1 0 + p~2 0 .
=
(3.40)
Da wir nur eine Ortskoordinate haben verwenden wir die skalaren Größen
mv + 0
=
m v10 + 2m v20 .
(3.41)
Ebenso gilt der Energieerhaltungssatz (potentielle Energie ändert sich nicht)
K1 + K2
=
für den wir
1
m v2 + 0
2
v2
K10 + K20 ,
=
=
(3.42)
1
2
m v10 2 + m v20 2
2
2
v10 2 + 2v20 2 .
bzw.
(3.43)
schreiben. Aus (3.41) finden wir
v10 = v
2v20 .
(3.44)
Diesen Wert setzen wir in (3.43) ein und erhalten
2v20 2
=
v2
v10 2 = v 2
(v
2v20 )2 = 4v v20
4v20 2
beziehungsweise nach Kürzen durch v20 die Gleichung
3v20 = 2v .
(3.45)
mit der Lösung v20 =
Aus (3.44) erhalten wir damit v10 =
Der Impuls des zweiten Schlittens nach dem Stoß ist + 43 mv, der des Ersten
Die Impulsänderung des zweiten Schlittens ist gleich + 43 mv, die des Ersten
2
3 v.
1
3 v.
1
3 mv.
4
3 mv.
24
KAPITEL 3. ENERGIEERHALTUNG
3.5
Thermische Energie
Im 18. Jhdt hatte man nur ein diffuses Verständnis für die Bedeutung von Wärme und hatte
die Wärmeeinheit Kalorie definiert. Mit ihr konnte man 1 g H2 O um 1 C erwärmen. 1843
zeigte Joule in Experimenten, dass Energie, die über Reibung an das Wasser übertragen wird,
zu einem Temperaturanstieg des Wassers führt und Wärme gleichbedeutend mit Energie ist.
In diesen Experimenten definierte er das mechanische Wärmeequivalent,
1 Kalorie = 4.186 Joule = 4.186 kg m2 /s2 .
(3.46)
T
1 kg
3.5.1
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
T+DT
1 kg
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
Definitionen zur thermischen Energie
Die mittlere9 kinetische Energie eines freien Atoms in einem Gas der Temperatur T ist
hKi =
3
kB T ,
2
(3.47)
wobei die Zahl 3 für die Anzahl der (translatorischen) Freiheitsgrade des Atoms steht und
kB die Boltzmann Konstante ist,
kB = 1.38 ⇥ 10
23
J/K .
(3.48)
Über die Beziehung (3.47) und einen Bezugspunkt werden der absolute Nullpunkt und die
Kelvin Skala definiert. 273.15 K entsprechen 0 C. Die Temperaturdifferenz von 1 K entspricht einer Temperaturdifferenz von 1 C. Die mittlere innere Energie (= die mittlere thermische Energie) eines atomaren Gases, z.B. Edelgas bei Zimmertemperatur, kennt nur den
Translationsbeitrag hKi aus (3.47).
Beispiel:
Ein m3 Argon bei Atmosphärendruck enthält bei Zimmertemperatur, 295 K
etwa N = 2 ⇥ 1025 Atome. Die mittlere innere Energie im Gasvolumen ist
3
hU i = N kB T ⇡ 92 kJ .
2
(3.49)
Die mittlere Energie eines einzelnen Argon Atoms ist hui = 32 kB T ⇡ 38 meV.
Die mittlere innere Energie eines Moleküls ist im Allgemeinen größer als der Ausdruck
(3.47), da neben Translation auch innere Freiheitsgrade (Rotation und Schwingungen) angeregt werden, Bei einem molekularen zweiatomigen Gas wie Stickstoff oder Sauerstoff ist
der Wert der inneren Energie größer, da die Freiheitsgrade der Rotation (+ 22 kB T ) und der
Schwingung (+ 12 kB T ) zusätzliche Wärmeenergie speichern. So definiert sich in Gasen die
mittlere innere Energie = hU i = hKi + hK intern i
(3.50)
9 Zum Verständnis des Ausdruckes mittlere müssen wir uns mit dem Begriff einer Verteilungsfunktion und
der Bedeutung statistischer Aussagen auseinandersetzen. Mehr dazu in Kapitel 12.
3.5. THERMISCHE ENERGIE
25
als Summe von translatorischen und internen Energiebeiträgen. Die Möglichkeit des Speicherns von Energie in interner Bewegung gilt auch für die Bausteine eines festen Körpers. Sie
sitzen an Gleichgewichtspositionen um die sie gewisse beschränkte Bewegungen ausführen
können. Diese Bewegungen können sowohl durch direkten physikalischen Kontakt als auch
über langreichweitige Wechselwirkungen angeregt werden.
Daraus ergibt sich auch eine anschauliche Erklärung des Zusammenhangs zwischen Reibung und der damit verbundenen Übertragung von geordneter Bewegungsenergie in ungeordnete thermische Energieformen (die letztlich immer Bewegung-s bzw. potentielle Energie
darstellen). Die Wechselwirkung zweier sich berührender Objekte, die sich relativ zueinander bewegen führt zur Anregung der thermische Bewegung der Bausteine der Objekte.
Ebenso ergibt sich so bei Berührung zweier Objekte mit unterschiedlicher thermischer Bewegungsenergie die Möglichkeit der Übertragung thermischer Energie.
Die mittlere kinetische Energie der Gasmoleküle ist ursächlich mit dem Gasdruck verbunden. Druck
ist Ausdruck für den mittleren Impulstransfer pro Sekunde, ausgeübt durch Moleküle, die auf die
Wand treffen und dort elastisch reflektiert werden,
p = nkB T .
Dabei ist n die Atomdichte, kB die Boltzmann Konstante und T die absolute Temperatur. Hier
überlegen wir uns auch die Impulserhaltung bei der elastischen Reflektion eines Atoms von einer
festen Wand. Diese Gleichung entspricht der idealen Gasgleichung (siehe Kapitel 12).
3.5.2
Wärme und Arbeit
Der gesamte thermische Energieinhalt eines Objektes ist zumeist nur sehr schwierig zu bestimmen. Experimentell leichter zugänglich ist die Beobachtung der Änderung der inneren
Energie. Dabei kontrolliert man, wie viel Energie durch die Oberfläche des Objektes ausgetauscht wird und beobachtet die Temperatur des Objektes bzw. die seiner Umgebung.
Die Ausdrücke Wärme und Arbeit sind thermodynamisch definiert, um den Energietransfer
durch die Grenzen des Systems zu beschreiben.
Wärme bezeichnet jede Form von Energie, die die Grenzen des Systems auf Grund einer
Temperaturdifferenz überquert.
Arbeit hingegen bezeichnet jede Form von Energie, die auf Grund anderer physikalischer
Vorgänge in das System eingebracht werden.10 Zum Beispiel führt das Umrühren von Wasser
(mit einem Löffel bei der Wassertemperatur) über Reibung zur Erwärmung des Wassers. Damit haben wir Arbeit am System geleistet, nicht aber dem System Wärme zugeführt. Wenn
wir hingegen mit einem heißen Löffel umrühren, werden sowohl Wärme als auch Arbeit
zugeführt.
Auf Grund der Energieerhaltung gilt, dass eine Änderung der inneren Energie des Systems U mit dem Energietransfer durch die Grenzen des Systems in Beziehung stehen
muss,
U =Q+W .
(3.51)
Hier bezeichnet Q die Wärmeenergie, die in das System eingebracht wurde und W die
Energie, die über Arbeit in das System eingebracht wurde. Q und W zählen negativ wenn
Wärme aus dem System fließt oder das System Arbeit verrichtet.
10 oder
vom System geleistet werden.
26
3.5.3
Spezifische Wärmekapazität
Nur in atomaren Gasen kann die interne Energie U in einem einfachen Bild veranschaulicht
und in einem einfachen Ansatz (siehe Gleichung 3.49) berechnet werden. In flüssigen oder
festen Körpern liegt typischerweise eine Mannigfaltigeit von Bindungs- und Bewegungszuständen vor. Diese stehen in keinem einfachen Zusammenhang mit makroskopischen Eigenschaften des Körpers wie z.B. der Dichte. So ergibt sich auch keine einfache Beziehung
zwischen der inneren Energie U und der Temperatur eines Objektes. Es gibt aber einen experimentell beobachtbaren Zusammenhang zwischen der Änderung der inneren Energie dU
eines Objektes und der Änderung seiner Temperatur dT . Diesen Zusammenhang beschreibt
das Produkt aus Masse des Körpers und seiner spezifischen Wärmekapazität .
Mit spezifischer Wärmekapazität bezeichnet man den Koeffizienten in der Beziehung
zwischen der Änderung der inneren Energie dU des Objektes der Masse m und der Änderung
der Temperatur des Objektes dT ,
(3.52)
dU = m c dT .
Die Größe c ist spezifisch für jede Substanz und unterschiedlich für verschiedene Phasen
derselben Substanz. Die Größe c ist selbst von der Temperatur abhängig aber über gewisse
Temperaturbereiche kann c als konstant angenommen werden. Dann besteht der in (3.52)
suggerierte lineare Zusammenhang zwischen dU und dT . Die Größe c ist keine Form von
Wärme, sie ist ein Maß für die Änderung der inneren Energie pro Masseeinheit pro Grad
Temperaturänderung.
lineare Näherung
Thermische Energie
specific heat
capacity
KAPITEL 3. ENERGIEERHALTUNG
Steigung = mc
dU ~ dT
dU
dT
Temperatur
Experiment: Heisse Kugeln aus Alu Blei, Messing auf Paraffin.
Tabelle zu spezifischen Wärmekapazitäten:
Substanz
Wasser
Alkohol
Eis
Holz
Aluminium
c
J kg 1 K
4186
2400
2100
1700
900
1
Substanz
Luft
Eisen
Kupfer
Gold
Blei
c
J kg 1 K
740
450
387
129
128
1
Buchführung zur internen Energie :
1) Wir lassen einen Sack voller Bleikugeln aus dem 20 Stock (zi = 60 m Höhe) auf die Erde fallen.
Die Kugeln verformen sich und bleiben im Sack am Boden liegen. Um wieviel Grad erwärmen sich
die Bleikugeln? Die spezifische Wärme von Blei ist 128 J kg 1 K 1 .
Wir untersuchen die Energiebilanz
K i + V i + Ui = K f + V f + Uf .
(3.53)
3.6. ENERGIE IN BINDUNGEN
27
Wir setzen die kinetische Energie der Bleikugeln zu Beginn Ki = 0 und ihre potentielle Energie am
Ende Vf = 0 und definieren dU = Uf Ui und erhalten
g zi
m g zi = m c dT
also
dT =
= +4.6 K .
(3.54)
c
Experiment: Kugel fällt auf ein Thermoelement in eine Stück Blei
2) Wir geben zu 250 ml Wasser bei 22o C einen 50 g schweren Aluminium Quader bei der Temperatur
von 100o C. Was ist die Endtemperatur von Wasser und Aluminium. Wir nehmen an, dass kein
Energietransfer an die Wände desWasserbehälters oder durch die Wasseroberfläche erfolgt.
mH2 O cH2 O (TfH2 O
Mit
TfH2 O
3.6
TiH2 O ) + mAl cAl (TfAl
TiAl ) = 0
(3.55)
= TfAl = Tf erhalten wir Tf = 24.5o C.
Energie in Bindungen
Die thermische Energie (die Energie die sich an einem Thermometer zeigt) ist nur eine der Formen
von innerer Energie, die in einem Objekt stecken kann. Energie findet sich zum Beispiel auch
in den chemischen Bindungen des Objektes, in der latenten Form der Molekülanordnung, in der
Spinausrichtung magnetischer Komponenten des Objektes und in der Kernenergie seiner Bausteine.
Bei einer Betrachtung der Bilanz der inneren Energie eines Systems müssen auch diese Formen
explizit berücksichtigt werden, sobald wir es mit einer chemische Umwandlung, einer Phasenänderung, einer Änderung des magnetischen Zustandes oder einer Kernumwandlung im Objekt zu tun
haben.
3.6.1
Potentielle Energiefunktion
Abstand x H106 mL
0.5 1.0 1.5 2.0 2.5 3.0
1.0
0.8
0.6
0.4
0.2
0.0
1.0
VHxL
-1.0 -0.5 0.0 0.5 1.0
Abstand x HcmL
pot. Energie
0.0
-0.2
-0.4
-0.6
-0.8
-1.0
pot. Energie
pot. Energie
Zur Veranschaulichung der Bedeutung einer potentiellen Energie hilft ein Diagramm der potentiellen Energie zweier isolierter Objekte als Funktion des Abstandes zwischen beiden. Vereinfacht
geht das wenn nur eine Ortskoordinate die Energieabhängigkeit beschreibt. Besonders einfach ist
es, wenn eines der beiden Objekte als unendlich groß und damit als unbeweglich angesehen werden
kann, z.B. eine Masse hängt über eine Feder von der Wand, ein Satellit kreist um die Erde, oder
ein Atom in der Nähe einer Oberfläche, die das Atom binden (adsorbieren) kann. Die folgenden
Potentialbilder gelten aber auch für zwei freie Objekte vergleichbarer Masse.
0.5
VHxL
0.0
-0.5
Abstand x H Å L
1.0 1.5 2.0 2.5 3.0 3.5 4.0
Wir gehen davon aus, dass unser System isoliert ist, die Gesamtenergie E besitzt und unser leichtes
Objekt sich an einem festen Ort x (angedeutet durch die mit bezeichnete Position) befindet. Im
Fall des Federpendels befinde sich also unser leichtes Objekt an der Position x = ±8 mm, im Fall
des Satelliten an der Position x = 2500 km.
Bei bekannter Gesamtenergie E können wir die kinetische Energie unseres leichten Objektes
aus der Position im Diagramm (bei beliebiger Position x) ablesen (die kinetische Energie kann aber
nicht negativ sein)
E = K(x) + V (x) .
(3.56)
Aus dem Diagramm der potentiellen Energie können wir auch die Kraft auf das leichte Objekt
bestimmen
~ · d~r = Fx dx .
dK = F
(3.57)
28
KAPITEL 3. ENERGIEERHALTUNG
In Worten: wenn Kraftrichtung und Ortsänderung in dieselbe Richtung zeigen (das Skalarprodukt
ist positiv), dann nimmt die kinetische Energie zu, dK > 0. Wir schliessen auch, dass diese Änderung
der kinetischen Energie auf Kosten der potentiellen Energie erfolgt,
dV = dK = Fx dx
woraus folgt
Fx =
dV
.
dx
(3.58)
Allgemein schreibt man für den Kraftvektor
~ =
F
~
rV
(3.59)
~ der Nabla-Operator, ein sogenannter Vektoroperator ist. Die Komponenten des Nablawobei r
Operators sind die partiellen Ableitungen nach den Ortskoordinaten,
~ = { @ , @ , @ } = ~ex @ + ~ey @ + ~ez @ ,
r
@x @y @z
@x
@y
@z
(3.60)
wobei die ~ex , ~ey , ~ez die Einheitsvektoren des kartesischen Koordinatensystems sind. Das Zeichen
@/@x deutet an, dass die Differenziation partiell nach der Variablen x durchgeführt wird. Partiell
bedeutet, dass die Ableitung nur nach der Variablen x (bzw. y oder z) durchgeführt wird, während
die anderen Variablen y, z (bzw x, z oder x, y) als konstant angesehen werden.
Beispiel : Die Funktion der potentiellen Energie (das Potential) sei V (x, y, z) = x2 y
Dann ist der Kraftvektor
0
1
0
1
@/@x
2xy
~ = @ @/@y A V (x, y, z) = @ x2 + 2yz 2 A .
F
@/@z
+2y 2 z
3.6.2
y2 z2 .
(3.61)
Molekulare Bindung
Das rechte Bild auf Seite 27 ist typisch für eine molekulare Bindung. Diese Darstellung veranschaulicht die Energie, die bei der Bindung des Moleküls frei wird oder die zum Aufbrechen einer Bindung
eingebracht werden muss.11 Ausgezeichnete Bereiche im Energiediagramm sind Umkehrpunkt(e),
verbotene und erlaubte Bereiche, Gleichgewichtsposition und stabile und instabile Punkte. Auch
Phasenänderungen können in solchen Potential-Landschaften diskutiert werden. Der gebundene
Bereich bei x ⇡ 1 würde einer festen Konfiguration entsprechen, der Bereich bei x > 2.5 zwei freien
Teilchen.
3.6.3
Latente Wärmekapazität
Phasenumwandlungen brauchen Energie um stattzufinden oder setzen Energiemengen frei. Diese
Energiemengen werden mit Namen wie Schmelzwärme, Verdampfungswärme, Kondensationskälte
etc. bezeichnet.
Wenn wir mit qL die latente Wärmekapazität bezeichLatente Wärmekapazitäten
nen, dann gilt für die Änderung der inneren Energie
Substanz und
qL
bei der Phasenumwandlung der Masse m
Phasenumwandlung kJ kg 1
Schmelzen von festen O2
14
dU = ± m qL .
(3.62)
Schmelzen von festen H2
59
Das Plus Zeichen gilt für Kondensation bzw. EinSchmelzen von Eis
333
frieren. Das Minuszeichen gilt bei Verdampfung und
Schmelzen von Kupfer
205
Schmelzen und zeigt an, dass bei diesen Prozessen dem
Verdampfen von Wasser
2256
Objekt innere Energie verloren geht.
Verdampfen von Kupfer
4730
11 Ein
Beispiel für die Energiebarriere wäre die Aktivierungsenergie beim Verbrennen von H2 und O2 .
3.7. ANDERE ENERGIEFORMEN
29
Beispiele:
Temperatur H o C L
1) Erhitzen von m = 1 kg Eis, zu Beginn bei T =
20
10
0
-10
-20
0
100
200 300 400
Zeit HSekundenL
500
25 C mit einer Leistung P = 1 kW.
Steigung zu Beginn ist P/mce = 0.48 0 C/s.
Die latente Phase dauert m qL /P = 333 s.
Im flüssigen Bereich steigt die Temperatur
langsamer als im gefrorenen (siehe Tabelle der
spez. Wärmekapazitäten auf Seite 26),
die Steigung ist P/mcw = 0.24 0 C/s.
Exp. mit Woodschem Metall (D21.3)
2) Wieviel Gramm Eis braucht man um 500 g Wasser bei 20o C auf 0o C abzukühlen?
Zum Schmelzen von m Gramm Eis verbrauchen wir U = mqL /1000 J. Die innere Energie des
Wassers müssen wir um U = 500 cw 20/1000 J erniedrigen. Daraus finden wir, dass mindestens
m = 500cw 20/qL = 125.7 Gramm Eis notwendig sind.
3) Energieverbrauch beim Klettern.
Ein Bergsteiger mit M = 70 kg klettert auf einen h = 1500 m hohen Berg. Durch Haut und Lunge
verdampft er dabei m = 2 kg Wasser. Wieviel Nahrungsenergie verbrennt er beim Aufstieg?
Die kinetische Energie des Bergsteigers ändert sich nicht. Seine potentielle Energie steigt um
V = M gh ⇡ 1 MJ wobei wir vernachlässigen, dass sich das Gewicht des Bergsteigers durch
Essen und Schwitzen verändern. Wir vernachlässigen Reibungskräfte durch den Kontakt mit dem
Boden und nehmen an, dass sich die Körpertemperatur des Bergsteigers nicht ändert. Die latente
Energie des verdampften Wassers benötigt UL = m qL = 4.5 MJ, wobei qL = 2256 kJ/kg ist. Die
Verbrennungsenergie, die aufgebracht werden muss nennen wir UB . Auf Grund der Energieerhaltung haben wir UB + V + UL = 0. Wir erhalten UB = 5.5 MJ. Das entspricht 5.5 MJ /
4186 (J/cal) =1324 Kalorien.
3.6.4
Chemische Energie und Kernenergie
Der Einfluss der Temperatur auf die Ablaufgeschwindigkeit chemischer Reaktionen kann oft im
Sinne einer Energiebarriere erklärt werden, wie sie im Potentialbild auf Seite 27 erscheint. Um
eine Energiebilanz bei chemischen Reaktionen im Energiebild zu zeichnen bedient man sich typisch
zweier Potentialminima und einer Reaktionsbarriere zwischen beiden. Exotherm ist eine Reaktion,
wenn sich die Produkte bei tieferer potentieller Energie finden als die Reaktanden. Im anderen Fall
ist die Reaktion endotherm. Als Beispiel : Verbrennung von Benzin setzt 40 MJ pro kg Benzin frei.
Dieses Bild kann auch für Kernreaktionen verwendet werden. Zum Beispiel binden Protonen
und Neutronen im Atomkern mit typisch 8 MJ/Nukleon, allerdings abhängig von der Massenzahl.
Auf Grund dieser Abhängigkeit ergeben sich die exothermen Wege der Fusion von Wasserstoff zu
Helium bzw. der Kernspaltung von Uran in zwei Elemente mittlerer Masse.
3.7
3.7.1
Andere Energieformen
Leistung
Leistung ist ein technischer Begriff, der die Rate angibt mit der Energie E übertragen wird.
P =
dE
dt
P =
dE
~ · d~r = F
~ · ~v = Fx dx + Fy dy + Fz dz
=F
dt
dt
[P ] = 1 Watt = 1 W = 1 J/s
power
(3.63)
(3.64)
30
3.7.2
KAPITEL 3. ENERGIEERHALTUNG
Elektrische Energie
Die elektromotorische Kraft (EMK) ist die Fähigkeit eines Systems, eine Spannung zu erzeugen.
Der Begriff EMK beschreibt trotz seiner Bezeichnung keine Kraft im physikalischen Sinn sondern
die Ursache für eine elektrische Potentialdifferenz U el wie sie in einer galvanischen Zelle oder einer
Induktionsspannung besteht. Mit Hilfe einer elektrischen Potentialdifferenz ist es z. B. möglich,
einen elektrischen Strom durch ein leitendes Medium zu treiben. So ist elektrische Energie in einer
mikroskopischen Form der Bewegung und der Position von Ladungsträgern (z. B. Elektronen) zu
finden.
Elektrische Energie wird typischerweise in Kilowatt-Stunden (kW.h) angegeben. 1 kW.h ist die
elektrische Energie, die in einer Stunde bei einer Leistung von 1000 Watt umgesetzt wird. Damit
entspricht
1 kW.h = 1000
3.7.3
J
⇥ 3600 s = 3.6 MJ .
s
(3.65)
Energie in Schall und Licht
Mechanische Störungen die regelmäßig erfolgen werden von uns als Ton wahrgenommen, bei einmaliger Erscheinung als Knall, wenn unregelmäßig als Geräusch. Verantwortlich dafür sind Schallwellen.
Diese entstehen z.B. auf Grund des Impulsübertrags der Bewegung eines Objektes auf die umgebenden Luft. Die dadurch verursachte Dichteänderung breitet sich in der Folge im Raum als Welle
aus.
Analog führen Änderungen in der relativen Position von elektrischen Ladungen zu elektromagnetischen Wellen. In einem kleinen Bereich des Spektrums werden diese als Lichtwellen wahrgenommen.
Schallwellen und Lichtwellen tragen Energie mit, die man in Einheiten der Größe der Intensität
I misst. Intensität beschreibt den Transport von Leistung pro Flächeneinheit, also Energie pro Sekunde pro Flächeneinheit mit der Einheit Watt/m2 .
Beispiele:
1) 100 Watt Glühbirne wandelt 100 J elektrischer Energie pro Sekunde in Licht und Wärme um.
2) Wir berechnen die Lichtintensität, die Lichtleistung und die Photonenzahl, die in 100 m Entfernung von einer 100 Watt Glühbirne durch die Pupille eines Menschen trifft:
Eine Kugel mit Radius 100 m hat die Oberfläche von A = 4⇡R2 ⇡ 1.25 ⇥ 105 m2 . Die Lichtintensität in 100 m Entfernung von der Glühbirne ist also etwa I = 100/A ⇡ 800 µW/m2 .
Die menschliche Pupille ist etwa Ap = 5 mm2 groß. Durch sie passieren in 100 m Entfernung
also 100Ap /A ⇡ 4 ⇥ 10 9 Watt (4nW). Dies entspricht der Energiemenge von 4 ⇥ 10 9 J/s.
Ein Photon im gelben Bereich hat eine Energie von etwa 2 eV, also 2 ⇥ 1.6 ⇥ 10 19 J. Damit
treten etwa 1.2 ⇥ 1010 Photonen pro Sekunde durch die Pupille.
Schallwelle
3) Energie einer Schallwelle die auf eine Membran trifft.
Kapitel 4
Erhaltung des Drehimpulses
4.1
Einführung zum Drehimpuls
Experimente am Drehstuhl zeigen, dass sich die Winkelgeschwindigkeit des Drehstuhls ändert, wenn wir das Trägheitsmoment verändern, zum Beispiel durch Verändern der Position
der schweren Hanteln. Dabei bleibt der Drehimpuls
~ =I!
L
~
(4.1)
erhalten, nicht aber die Rotationsenergie
1
K rot = I! 2 .
(4.2)
2
Woher kommt / wohin geht die Rotationsenergie? ) Arbeit ist notwendig um den Abstand
der Hanteln von der Drehachse zu ändern.
4.2
Drehimpuls eines Teilchens
Ein Massepunkt mit dem Impuls p~ = m ~v bewegt sich auf der Bahnkurve ~r(t).
Sein Drehimpuls in Bezug auf den Koordinatenursprung ist
~ = ~r ⇥ p~ = m(~r ⇥ ~v )
L
(4.3)
In kartesischen Koordinaten sind die Komponenten des Drehimpulses
0
1 0
1
Lx
y pz z py
@ Ly A = @ z px x pz A .
Lz
x py y px
L = ”r ¥ p
Bei Bewegung in einer Ebene steht der Drehimpuls senkrecht zur Ebene. Bei gleichförmiger Kreisbewegung zeigt
~ in Richtung der Achse senkrecht zur Kreisfläche. Für
L
~ = const.
|~r| = const, |~v | = const ergibt sich L
Mit dem Vektor der Winkelgeschwindigkeit !
~ und der Beziehung ~r ⇥~v = r2 !
~ erhalten wir für ein einzelnes Teilchen
~ = mr2 !
das im Abstand r um die Achse rotiert L
~.
31
(4.4)
”r
m
p
angular
momentum
32
KAPITEL 4. ERHALTUNG DES DREHIMPULSES
Zur Definition des Drehimpulses eines ausgedehnten Objekts summieren wir die Drehimpulsbeiträge der einzelnen Teilchen
X
X
~ =
~i =
L
L
mi ri2 !
~ =I!
~.
(4.5)
i
i
Die Angabe des Drehimpulses bezieht sich immer auf einen vorgegebenen Punkt. Dieser
liegt auf der Achse des Drehimpulses. Bei einem frei rotierenden Körper nimmt man zumeist
den Schwerpunkt. Bei einem Körper, der sich um eine Achse dreht, bezieht man sich meist
auf einen Punkt auf der Achse ohne diesen Punkt explizit zu kennzeichnen, der Punkt wird
durch den Normalabstand der Masse zur Achse definiert.
Auch ein Körper, der sich auf einer geradlinigen Bahn bewegt hat einen Drehimpuls in
Bezug auf irgendeinen Punkt außerhalb der Bahn.
4.2.1
Einheit des Drehimpulses
In SI-Einheiten ist der Drehimpuls
2
2
h i
~ = [ ~r ⇥ p~ ] = kg m = kg m s = J s .
L
s
s2
action
(4.6)
Die Einheit des Drehimpulses, Energie⇥Zeit findet sich mehrmals in der Physik. Sie bezeichnet eine Größe mit dem Namen Wirkung. Neben dem Produkt von Ort mal Impuls
ist auch das Produkt Energie mal Zeit eine Wirkungsvariable.1
4.2.2
Mechanischer Ursprung eines Drehimpulses
Einem Objekt der Masse m in diesem Bild ordnen wir
den Drehimpuls
~ = ~r ⇥ p~
L
L = ”r ¥ p
(4.7)
r”
zu. Mögliche Ursachen für eine zeitliche Änderung des
Drehimpulses können sein:
• eine zeitliche Änderung des Impulses des Objektes
• eine zeitliche Änderung der Position des Objektes
m
p
Wenn wir die Kettenregel anwenden und beachten, dass das Kreuzprodukt nicht kommutativ
ist, die Reihung von ~r und p~ erhalten bleiben muss erhalten wir für die zeitliche Änderung
des Drehimpulses
~
dL
d~r
d~
p
=
⇥ p~ + ~r ⇥
dt
dt
dt
torque
(4.8)
~
~
Diesen Ausdruck nennt man Drehmoment , dL/dt
= D.
Ein Drehmoment ist Ursache für eine zeitliche Änderung des Drehimpulses.
1 Aus der Quantenphysik: Die kleinste in der Natur vorkommende Wirkungsänderung ist durch das Planksche Wirkungsquantum gegeben, h = 6.626 ⇥ 10 34 Js.
4.2. DREHIMPULS EINES TEILCHENS
33
Drehimpuls und Drehmoment sind über die Definition des Ortsvektors ~r
immer auf einen Punkt definiert (z.B. den Koordinatenursprung).
4.2.3
Erhaltung des Drehimpulses
Experimente am Drehstuhl
(A55.2, A55.3)
Alle Experimente zeigen darauf hin, dass in einem abgeschlossenen System der Drehimpulsvektor nach Größe und Richtung erhalten bleibt. Dazu betrachten wir drei Beispiele:
1) Am Drehstuhl verändert wir die Position der Hanteln (Masse m) ohne Wechselwirkung
mit der Außenwelt um einen Wert r.
~
Der Drehimpuls sollte erhalten sein, dL/dt
= 0. Offensichtlich ist aber ~r/ t 6= 0. Da ~r
und p~ immer senkrecht zueinander stehen können, schreiben wir (4.8) in der Form
r
p+r
t
p
=0
t
oder
r
=
r
p
.
p
Wenn wir den Abstand um 10 % verlängern (gleichbedeutend mit r/r = 0.1), verringern wir
den Impuls um 10%, p/p = 0.1. Bei der Abstandsänderung hat sich das Trägheitsmoment
der Masse m um 20 % erhöht.2 Also muss sich auf Grund von (4.1) die Kreisfrequenz um
~ =I!
20 % erniedrigen. Damit ist (4.1) erfüllt, L
~ bleibt konstant. Die kinetische Energie der
Rotation hingegen erniedrigt sich um 20 %, da K rot = 12 I! 2 .
2) Person mit Schwungrad auf dem Drehstuhl.
Eine Person mit Trägheitsmoment IP = 1 kg m2 um seine vertikale Achse sitzt auf einem
Stuhl, der sich frei um diese Achse drehen kann. In ihrer Hand hält sie an den Naben ein Rad
eines Fahrrades mit der Masse m = 1 kg. Dieses dreht sich mit ⌫P = 2 Umdrehungen pro
Sekunde um die Nabe. Das Trägheitsmoment des Rades um die Nabe ist IR = 0.1 kg m2 . Zu
Beginn hält die Person die Nabe parallel zur vertikalen Drehachse des Stuhls, aber r = 40 cm
von der Achse entfernt. In dieser Situation ist der Drehstuhl in Ruhe.
Jetzt dreht sie das Rad an seiner Nabe um eine horizontale Achse um 180 Grad. Mit
welcher Drehzahl rotiert in der Folge der Drehstuhl mit der Person und in welche Richtung?
Das System Person, Drehstuhl und Rad bilden ein abgeschlossenes System das frei um
die Drehachse des Stuhls rotieren kann. Zu Beginn ist der einzige Beitrag zum Drehimpuls
der des Rades das sich mit !R,i = 2⇡ ⇥ 2 rad/s um seine Nabe dreht. !
~ R,i zeige vertikal nach oben. Nach dem Umklappen zeigt !
~ R,f = !
~ R,i nach unten. Da sich jetzt der
Drehstuhl samt Inhalt bewegt, haben wir für den Gesamtdrehimpuls drei Beiträge, die dem
Anfangsdrehimpuls gleich sein müssen,
~ f = (IP + mr2 ) !
L
~ P,f + IR !
~ R,f = IR !
~ R,i
(4.9)
Daraus erhalten wir
|~
!P,f | =
2 IR |~
!R,i |
= 2.16 rad/s = 0.34 U/s.
IP + mr2
(4.10)
Zudem sehen wir, dass sich die Person in die Richtung dreht um die sich das Rad ursprünglich gedreht hat.
2 Warum 20 %? Wenn sich eine Größe r sich um
r ändert, dann ändert sich eine Größe x die quadratisch
von r abhängt, x / r2 , um x / 2r r. Also ändert sich x um den Wert xx / 2rr r .
34
KAPITEL 4. ERHALTUNG DES DREHIMPULSES
3) Maus auf einem Schallplattenteller.
Eine Maus der Masse m sitzt auf einem Schallplattenteller, der sich um die vertikale Achse
A drehen kann. Die Achse steht senkrecht zur Erde. Zu Beginn sind Teller und Maus in
Ruhe. Dann läuft die Maus entlang dem Tellerrand, im Abstand R vom Zentrum, mit einer
Geschwindigkeit von v = 0.6 m/s relativ zur Erde. Die Masse des Tellers ist 4m. Wie groß
ist die Geschwindigkeit der Maus relativ zum Teller? Diese bezeichnen wir mit vM . Mit vR
bezeichnen wir die Geschwindigkeit des Tellerrands relativ zur Erde.
v
A
A
R
w
R
2
Maus+Teller bilden ein abgeschlossenes
System, das frei um die Achse A rotieren
kann. Die Maus simulieren wir als Punktteilchen am Tellerrand. Das Trägheitsmoment des Tellers ist IT = 2mR2 . Der
Gesamtdrehimpuls ist immer gleich Null.
3 2
3
0
0
~ =L
~M + L
~T = 4
5=0
0 5+4
0
L
2
mRv
2m R !
(4.11)
Daraus folgt 2R ! = v. Das Minus Zeichens bedeutet, dass sich der Teller gegen den Uhrzeiger bewegt. Da vR = R ! gilt vR = v/2 = 0.3 m/s. Da die Maus mit v = 0.6 m/s
relativ zur Erde läuft und der Tellerrand mit vR = 0.3 m/s relativ zur Erde, läuft die Maus
mit vM = 0.9 m/s relativ zum Teller.3
3 Ein (masseloser) Beobachter der fest mit der sich drehenden Achse (=dem Teller) verbunden ist und
zum Tellerrand schaut, sieht dass die Maus alle T = 2R⇡/vM Sekunden einmal um den Teller herumläuft.
Ein Beobachter auf der Erde, nahe dem Tellerrand hingegen sieht die Maus alle T = 2R⇡/v Sekunden bei
ihm vorbeilaufen.

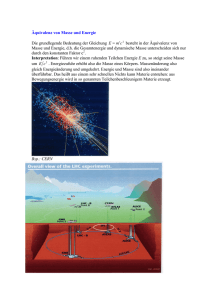





![228 Impuls [tra]](http://s1.studylibde.com/store/data/002209833_1-78fff0f04eecfca554443edbe3773399-300x300.png)