1. Funktionsweise - Institut für Leistungselektronik und Elektrische
Werbung

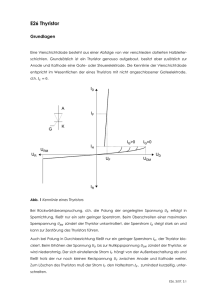
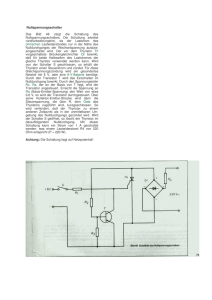
Institut für Leistungselektronik und Elektrische Antriebe Prof. Dr.-Ing. J. Roth-Stielow Übungen Leistungselektronik 2 Inhalt der Übungen: 1. Funktionsweise des Thyristors 2. Der Kommutierungsvorgang in fremdgeführten Stromrichteranordnungen 3. Resonant schaltentlastende (Gleich)-Spannungswandler 4. Der Dreipunkt Wechselrichter (NPC) Aufgaben zum Stoff der Vorlesung und der Übungen. Übungen Leistungselektronik 2 Umdruck 1 Blatt 1 Umdruck 1: 1.1 Funktionsweise des Thyristors Thyristor Der Thyristor war lange Zeit das vorherrschende Schaltelement in der Leistungselektronik. Auf Grund seiner einfachen Herstellung, er benötigt keine feinen Halbleiterstrukturen, wurde er in den 50er Jahren, noch vor dem Transistor eingeführt. Weit verbreitet ist der Thyristor in Anwendungen mit niedrigen Schaltfrequenzen, z. B.: als gesteuerter Eingangsgleichrichter bei einer Netzfrequenz von 50 Hz. In Bereichen sehr hoher Spannungen und Ströme, die von anderen Bauelementen noch nicht erreicht werden, findet sich ein weiterer Einsatzbereich des Thyristors (Bsp.: HGÜ). Ein einziger Thyristor kann Spannungen bis zu 13 kV sperren und Ströme bis 6 kA führen. Arbeitsbereiche leistungselektronischer Bauteile mit Sperrspannung über Durchlassstrom: Bild 1-1.1 Übungen Leistungselektronik 2 Umdruck 1 Blatt 2 Arbeitsbereiche leistungselektronischer Bauteile mit Schaltleistung über Schaltfrequenz: Bild 2-1.1 1.1.1 Aufbau und Funktionsweise Der Thyristor ist ein Vierschicht-Element mit folgender Schichtenfolge: Bild 3-1.1 Übungen Leistungselektronik 2 Umdruck 1 Blatt 3 1.1.1.1 Ungesteuerter Betrieb Auf Grund des Halbleiteraufbaus sperrt der Thyristor im ungesteuerten Zustand sowohl in Vorwärts- als auch Rückwärtsrichtung. Bild 4-1.1 Übungen Leistungselektronik 2 Umdruck 1 Blatt 4 Im gesperrten Zustand verhält sich der Thyristor wie eine Leistungsdiode, die Sperrkennlinie gleicht daher der einer Leistungsdiode. Bild 5-1.1 1. Sperrkennlinie: UBR (uAK < 0) URRM höchstzulässige periodische Spitzensperr- Durchbruchspannung spannung in Rückwärtsrichtung IR 2. Blockierkennlinie: UDRM höchstzulässige periodische Spitzensperr- (uAK > 0, nicht gezündet) spannung in Vorwärtsrichtung UB0 Übungen Leistungselektronik 2 Sperrstrom Nullkippspannung Umdruck 1 Blatt 5 1.1.1.2 Einschaltvorgang Der Thyristor „zündet“, wenn die Spannung uAK > 0 ist und am Gateanschluss ein Steuerimpuls genügender Amplitude und Dauer anliegt. Die bis dahin sperrende Raumladungszone des mittleren PN-Übergangs wird dann durch Mitkopplungseffekte von Ladungsträgern überschwemmt und der Thyristor geht in den leitenden Zustand über. Dieser Zusammenhang wird am besten durch ein Ersatzschaltbild mit 2 Transistoren verdeutlicht: Bild 6-1.1 Übungen Leistungselektronik 2 Umdruck 1 Blatt 6 Vorgänge im Thyristor: Bild 7-1.1 Ungewolltes Zünden eines Thyristors: a) Überkopfzünden: Überschreiten der Nullkippspannung UB0 bei iG = 0 (Ist im Allgemeinen unzulässig). Erreicht die Spannung uAK den Wert der Nullkippspannung, so wird die Durchbruchspannung der mittleren Sperrschicht überschritten und der Thyristor beginnt zu leiten. Dieser Vorgang ist sehr kritisch, da in Folge von Unebenheiten (Inhomogenitäten) im Halbleiter zunächst ein enger Kanal zuerst leitet. Der Kanal muss dann während des Einschaltens die gesamte Verlustenergie aufnehmen. b) Kritische Spannungssteilheit: Übersteigt die Spannungssteilheit duAK dt bei iG = 0 den kritischen Wert des Thyristors, krit so wirkt der Strom iC wie ein Zündstrom und der Thyristor wird leitend. Typischer Wert: duAK dt Übungen Leistungselektronik 2 = 1000 V/µs krit Umdruck 1 Blatt 7 Durchlasskennlinie: Im leitenden Betrieb besitzt der Thyristor die gleichen Eigenschaften wie eine leitende Diode. Bild 8-1.1 Ersatzschaltbild des realen Thyristors: Bild 9-1.1 Übungen Leistungselektronik 2 Umdruck 1 Blatt 8 1.1.2 Schalteigenschaften: 1.1.2.1 Dynamisches Verhalten beim Einschalten: Beispielhaft sei die Schaltung in Bild 10-1.1 angenommen. In Bild 11-1.1 sind die Verläufe der Spannung uAK und des Stromes iA während des Einschaltvorgangs zu sehen. Bild 10-1.1 Bild 11-1.1 iA = 0 ; Der Thyristor sei für t < t0 stromlos. Ausgangszustand: t = t0 : Thyristor erhält einen Gateimpuls. tgd Zündverzögerungszeit (abhängig von der Höhe und der Steilheit des Zündimpulses) Vom Beginn des Steuerimpulses bis uAK ↓ = 0,9 ⋅ u0 ; In der Basiszone ist eine Mindestladung erforderlich, bis der Thyristor in einem engen Kanal durchbricht. tgr Durchschaltzeit (abhängig von der Steilheit des Laststroms) Von uAK = 0,9 ⋅ u0 bis uAK = 0,1⋅ u0 ; Zeit bis sich leitfähige Kanäle ausbilden und uAK abgefallen ist. tgs Zündausbreitungszeit (abhängig vom Durchmesser der Halbleiterscheibe) Typ. Wert der Ausbreitungsgeschwindigkeit Bsp.: ∅ = 56 mm → t gs = 560μs v gs = 0,1 mm µs Zeit, bis die gesamte Halbleiterscheibe leitfähig geworden ist. Übungen Leistungselektronik 2 Umdruck 1 Blatt 9 1.1.2.2 Dynamisches Verhalten beim Abschalten: Thyristoren gehen in den sperrenden Zustand über, wenn der Anodenstrom unter den Haltestrom IH gesunken ist. Anhand der in Bild 12-1.1 gezeichneten Schaltung soll nun der Ausschaltvorgang näher betrachtet werden. Die Verläufe der Spannungen und Ströme sind in Bild 13-1.1 zu sehen. Bild 12-1.1 Bild 13-1.1 Zeitpunkt t = t0: Schalter S1 wird von Stellung 1 in Stellung 2 geschaltet. trr Sperrverzögerungszeit: In den beiden mittleren Schichten befinden sich noch Ladungsträger, welche durch langsame Rekombination abgebaut werden müssen. Beim Aufschalten einer Spannung in Sperrrichtung fließt kurzzeitig ein Strom in Rückwärtsrichtung (Rückstrom). Dieser Strom ruft beim Abklingen an den stets vorhandenen Induktivitäten eine Überspannung hervor. Diesen Vorgang nennt man Trägerspeichereffekt (TSE). Durch eine geeignete TSE-Schutzbeschaltung kann diese Überspannung am Thyristor auf zulässige Werte begrenzt werden. tq Freiwerdezeit (Bauteileigenschaft): Zeitdauer, die nach dem Zeitpunkt, bei dem der Anodenstrom null wird erforderlich ist, bis das Ventil frei von Ladungsträgern ist und seine volle Steuer- und Sperrfähigkeit wiedererlangt. Übungen Leistungselektronik 2 Umdruck 1 Blatt 10 tc Schonzeit (Schaltungseigenschaft): Zeitdauer von dem Zeitpunkt wenn der Anoden- strom zu null wird, bis zu dem Zeitpunkt an dem das Ventil wieder positive Sperrspannung erhält. Durch die Schaltung muss immer sichergestellt sein, dass gilt: t c > tq 1.1.3 Ansteuerung Mit Hilfe einer Steuerspannung zwischen dem Gate und der Kathode des Thyristors kann dieser gezündet werden. Die Steuerspannung, welche in Form eines Steuer- oder Zündimpulses angelegt wird, muss die im Datenblatt des Thyristors angegebenen Werte bezüglich der Impulsdauer und Impulshöhe einhalten. 1.1.3.1 Bemessung der Zündimpulse: a) Dauer: Die minimale Zündimpulsdauer tG muss überschritten werden. Dies muss durch das Gatesteuergerät sichergestellt werden. Der Anodenstrom muss den Einraststrom überschreiten. (iA > IL) Kann nur durch die Schaltung sichergestellt werden. b) Amplitude: Die Eingangskennlinien unterliegen einer starken Exemplarstreuung. Daher wird vom Hersteller ein Toleranzfeld für diese Kennlinien angegeben. Der Zündimpulsgenerator (siehe 1.1.3.2) muss nun genau auf dieses Kennlinienfeld abgestimmt werden. Damit die bei der Festlegung der zulässigen Strombelastung mit einbezogene Steuerverlustleistung PG nicht überschritten wird, müssen Zündspannung und Zündstrom unterhalb einer hyperbolischen Grenzlinie PG = uGK ⋅ iG = const. liegen. Auch die Temperaturabhängigkeit der Zündwerte spielt ein wichtige Rolle. Bei zunehmender Temperatur reichen kleinere Zündströme aus. Dies hat zur Folge, dass die Zündung bei tiefen Temperaturen erschwert wird. Deshalb muss der obere Zündwert für eine sichere Zündung bei der niedrigsten Temperatur die auftreten kann, überschritten werden. (Bsp. Bahnanwendung, HGÜ) Übungen Leistungselektronik 2 Umdruck 1 Blatt 11 Eingangskennlinienfeld: Bild 14-1.1 Bereiche: oberer Zündstrom oberhalb dieser Werte zündet der obere Zündspannung Thyristor sicher. unterer Zündstrom unterhalb dieser Werte zündet der untere Zündspannung Thyristor sicher nicht 1 keine Zündung 2 mögliche Zündung 3 sichere Zündung Übungen Leistungselektronik 2 Umdruck 1 Blatt 12 1.1.3.2 Zündimpulsgenerator: Bild 15-1.1 zeigt ein einfaches Ersatzschaltbild eines Zündimpulsgenerators: Bild 15-1.1 Die Kennlinie dieses Zündimpulsgenerators bestimmt nun, ob ein sicheres Zünden des Thyristors ermöglicht wird. Die technische Realisierung einer potenzialfreien Ansteuerschaltung kann wie folgt aussehen: A n o d e 1 5 V B Y S 2 1 -4 5 2 7 9 2 : 1 T h y r is t o r L 1 2 0 9 4 7 n F h 1 G a te 2 7 9 1 0 0 n F K a th o d e Z D 4 7 V A n s t e u e r s ig n a l f ü r d e n T h y r is t o r IR F D 1 1 0 G N D Bild 16-1.1 Funktionsweise: 1. Thyristor sperrt: iG=0, i1=0; M1 sperrt. 2. Zündimpuls: M1 leitet; i1 baut sich auf; iG stellt sich ein. 3. iA > IL: M1 sperrt; Dz wird leitend; an Lh1 liegt negative Spannung; i1 baut sich ab. Übungen Leistungselektronik 2 Umdruck 1 Blatt 13 1.1.4 Zusammenfassung der Eigenschaften von Thyristoren: 1 Thyristoren können nur in eine Richtung Strom führen (iA ≥ 0). 2 Der Thyristor kann sowohl positive als auch negative Spannungen uAK sperren, dabei fließt nur ein praktisch meist zu vernachlässigender Sperrstrom. 3 Thyristoren können durch einen Zündimpuls an der Steuerelektrode, dem Gate, vom sperrenden in den leitenden Zustand versetzt werden. 4 Der Thyristor bleibt auch ohne Zündimpuls eingeschaltet. Dabei muss aber der Anodenstrom einmalig größer als ein bauteilspezifischer Einraststrom sein und anschließend größer als der Haltestrom bleiben. 5 Im eingeschalteten Zustand ist die Spannung uAK sehr klein. 6 Der Thyristor kann über den Steueranschluss nicht mehr in den sperrenden Zustand versetzt werden. Der Thyristor sperrt erst, wenn der Anodenstrom unter den Haltestrom abgesunken ist und genügend lange unter diesem Wert bleibt. 7 Die Stromanstiegsgeschwindigkeit di/dt des Anodenstroms muss begrenzt werden. 8 Der Spannungsanstieg der Anoden-Kathodenspannung duAK/dt muss begrenzt werden. 9 Beim Abschalten des Thyristors fließt ein großer Anoden-Rückstrom. Übungen Leistungselektronik 2 Umdruck 1 Blatt 14 1.2 Verluste und Erwärmung in Halbleiterventilen 1.2.1 Verlustleistung in Halbleiterventilen Die auftretenden Verlustleistungen in Halbleiterventilen setzen sich aus folgenden Anteilen zusammen: Sperrverluste Psperr Steuerverluste Psteuer Schaltverluste Durchlassverluste Ps Pd Blockierverluste Pblock In Rückwärtsrichtung bei nicht leitenden Dioden und Thyristoren Werden über den Steueranschluss (Gate bzw. Basis) zugeführt Ein- und Ausschaltverluste Während das Ventil leitet Bei anliegender Vorwärtsspannung, deren Betrag unterhalb der Durchbruchspannung liegt Tabelle 1-1.2 Die gesamte Verlustleistung berechnet sich aus der Summe der einzelnen Verlustleistungen. Bei den Anwendungen in Leistungselektronik 2 überwiegen die Durchlassverluste. Berechnung der Schaltverluste: Während des Ein- und Ausschaltens von Leistungshalbleitern treten kurzzeitig sehr hohe Leistungen auf. Der auftretende Augenblickswert der Leistung berechnet sich aus: p(t) = u(t) ⋅ i(t) Während des Schaltens entstehen folgende Verlustenergien: Ws,on = p(t) dt Ws,off = ton p(t) dt toff Die mittlere Schaltverlustleistung ergibt sich somit zu: Ps = Ps,on + Ps,off = 1 1 p(t) dt + p(t) dt = fs ⋅ (Ws,on + Ws,off ) Tt Tt on off Hierbei ist ton die Zeitdauer des Einschaltvorgangs, toff die Zeitdauer des Ausschaltvorgangs, 1 T die Periodendauer und fs = die Schaltfrequenz. T Die Schaltverluste sind proportional zu der Schaltfrequenz. Deshalb müssen sie bei zunehmender Schaltfrequenz (ab ca. 5kHz) immer berücksichtigt werden. Die Schaltfrequenzen der Anwendungen in Leistungselektronik 2 sind jedoch meist so gering, dass die Schaltverluste vernachlässigt werden können. Übungen Leistungselektronik 2 Umdruck 1 Blatt 15 Berechnung der Durchlassverluste: Bei Thyristoren und Dioden kann zur Berechnung der Durchlassverluste die statische Durchlasskennlinie aus Abschnitt 1.1.3 herangezogen werden. Die Durchlasskennlinie wurde dort mit der folgenden Gerade angenähert: uAK = UT0 + iA ⋅ RD Die Leistung berechnet sich als zeitlicher Mittelwert aus dem Produkt der anliegenden Spannung und des fließenden Stroms: PT = 1 u(t) ⋅ i(t)dt T Die mittlere Durchlassverlustleistung, welche maßgebend für die thermische Beanspruchung ist, berechnet sich somit zu: PT = ( ) 1 1 u(t) ⋅ i(t)dt = UT0 ⋅ iA (t) + i2A (t) ⋅ RD dt TT TT 2 1 2 1 PT = UT0 ⋅ iA (t) dt + RD ⋅ i (t) dt T A TT T IA I2Aeff Wobei: IA = arithmetischer Mittelwert IAeff = Effektivwert Die mittlere Durchlassverlustleistung eines Thyristors berechnet sich somit aus: PT = UT0 ⋅ IA + RD ⋅ I2Aeff Übungen Leistungselektronik 2 Umdruck 1 Blatt 16 1.2.2 Stromberechnungen Um die mittlere Verlustleistung berechnen zu können, muss der arithmetische Mittelwert und der Effektivwert des Stromes bekannt sein. i(t) Augenblickswert des Spezifischer, zeitlicher Verlauf des Stromes i Stromes i, z. B. sinusförmig. Linearer zeitlicher Mittelwert (Gleich- I arithmetischer Mittelwert richtwert) des Stromes i. Der Gleich- 1 I = i(t) dt TT richtwert ist der lineare Mittelwert der Beträge der Augenblickswerte i(t), gebildet über eine Periodendauer. Der Effektivwert stellt den zeitlichen, Ieff IAeff = Effektivwert 1 2 iA (t) dt TT quadratischen Mittelwert von Wechselgrößen dar. Tabelle 2-1.2 Beispiele: Arithmetischer Zeitlicher Verlauf von i(t) Mittelwert 0 ≤ t ≤ t e : i(t) = ˆi i( t) te T + te T I = î ⋅ te T Ieff = î te T I = î ⋅ te 2⋅T Ieff = î ⋅ 1 t 0 ≤ t ≤ t e : i(t) = ˆi ⋅ sin π ⋅ 2 ⋅ te t e I = î ⋅ π⋅T t e ≤ t ≤ T : i(t) = 0 Ieff = î ⋅ 1 t e ≤ t ≤ T : i(t) = 0 t 0 ≤ t ≤ t e : i(t) = ˆi ⋅ i( t) te i( t) T + te T t e ≤ t ≤ T : i(t) = 0 t s in u s te T T + te t Effektivwert t te 3 2 te T te T Tabelle 3-1.2 Übungen Leistungselektronik 2 Umdruck 1 Blatt 17 1.2.3 Thermisches Ersatzschaltbild Elektrisches Strömungsfeld Größe Zeichen Einheit Potential ϕ V Spannung U Strom I Widerstand Kapazität R= U I C Wärmeströmungsfeld Größe Zeichen Einheit Temperatur ϑ °C V Temperaturdifferenz Δϑ °C A Wärmeleistung PV W Ω Wärmewiderstand Rth F Wärmekapazität Cth °C W Ws °C Tabelle 4-1.2 Bild 1-2.1 Übungen Leistungselektronik 2 Umdruck 1 Blatt 18 Im thermisch eingeschwungenen Zustand gilt folgender Zusammenhang zwischen den thermischen Größen: R thJC ⋅ PVges = ϑJ − ϑC R thCA ⋅ PVges = ϑC − ϑA RthCA = RthCK + RthKA Erklärung der auftretenden Größen: PVges Gesamte Verlustleistung die im Halbleiter entsteht RthJC Wärmewiderstand zwischen Sperrschicht und Gehäuse RthCK Wärmewiderstand zwischen Gehäuse und Kühlkörper RthKA Wärmewiderstand zwischen Kühlkörper und Kühlmedium RthCA Wärmewiderstand zwischen Gehäuse und Kühlmedium Das Wärmespeichervermögen der Komponenten wird durch die Wärmekapazität Cth beschrieben. Dadurch erhält man das Ersatzschaltbild für den Impulsbetrieb. Es ergeben sich folgende Wärmezeitkonstanten τ = Rth ⋅ Cth : Silizium ca. 2 ms Gehäuse ca. 2s Kühlkörper ca. 2…20 min 1.2.4 Kühlung Leistungshalbleiter werden meist mit Kühlkörpern gekühlt. Der Kühlkörper sollte möglichst dicht am Leistungshalbleiter angebracht sein, damit der Wärmeübergangswiderstand sehr gering wird. Durch Wärmeleitpaste oder ein Wärmeleitpad kann der Wärmeübergang verbessert werden. Man unterscheidet zwischen der natürlichen Kühlung und der verstärkten Kühlung. Bei der natürlichen Kühlung wird die entstehende Wärme über einen Kühlkörper direkt an die Umgebungsluft abgegeben. Verstärkte Kühlung bedeutet, dass der Kühlköper entweder mit Lüftern bestückt ist, oder selbst durch Wasser oder Öl gekühlt wird. Übungen Leistungselektronik 2 Umdruck 1 Blatt 19 Die Kühlleistung Pk eines Kühlkörpers berechnet sich wie folgt: Pk = ρ ⋅ c ⋅ Q ⋅ Δϑ = ρ ⋅ c ⋅ Q ⋅ R thKA ⋅ Pvges Hierbei bedeutet: ρ = Dichte Luft: ρ = 1,20 kg / m3 c spezifische Wärme Luft: c = 1,00 ⋅ 10−3 Ws /(kg ⋅ K) Q = Kühlstrom Luft: Q = 5...100 l / s Δϑ = Temperaturunterschied zw. Gehäuse und Umgebung = Um nun für den entsprechenden Anwendungsfall den richtigen Kühlkörper auswählen zu können, geben die Kühlerhersteller zu jedem Kühlkörper den Wärmeübergangswiderstand RthKA an. In dieser Widerstandsangabe ist bereits berücksichtigt, ob es sich um natürliche oder verstärkte Kühlung handelt. Übungen Leistungselektronik 2 Umdruck 1 Blatt 20