Frequenzstabilisierung eines Lasers mittels - IAP TU
Werbung

Frequenzstabilisierung eines Lasers
mittels akustooptischer Modulation
Laser frequency stabilisation by means of acousto-optic modulation
Bachelor-Thesis von Nikolaus Lorenz
Juli 2012
Fachbereich Physik
Institut für Angewandte Physik
Nichtlineare Optik und
Quantenoptik
Frequenzstabilisierung eines Lasers mittels akustooptischer Modulation
Laser frequency stabilisation by means of acousto-optic modulation
vorgelegte Bachelor-Thesis von Nikolaus Lorenz
1. Gutachten: Prof. Dr. Thomas Halfmann
2. Gutachten: M. Sc. Simon Mieth
Tag der Einreichung: 23. Juli 2012
Inhaltsverzeichnis
Inhaltsverzeichnis
1 Einleitung
2 Theoretische Grundlagen
2.1 Linienbreite eines Lasers . . . . . . . . . . . . . . . . . . . . . .
2.2 Frequenzstabilisierung . . . . . . . . . . . . . . . . . . . . . . .
2.2.1 Heterodyne Messmethode . . . . . . . . . . . . . . . .
2.2.2 Phasenregelschleife . . . . . . . . . . . . . . . . . . . . .
2.2.3 Laserstabilisierung mittels einer Phasenregelschleife
1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
3
5
5
7
9
3 Experimenteller Aufbau
10
3.1 Optischer Aufbau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.2 Elektronischer Aufbau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4 Experimentelle Ergebnisse
4.1 Charakterisierung des experimentellen Aufbaus . . . . . . . . . . . . .
4.2 Stabilisierung durch Frequenzmischung . . . . . . . . . . . . . . . . . .
4.3 Stabilisierung mit einem digitalen Phasendetektor . . . . . . . . . . . .
14
14
17
21
5 Zusammenfassung und Ausblick
24
i
Kapitel 1. Einleitung
Kapitel 1
Einleitung
Laser werden heutzutage in der Industrie und vielen Bereichen des täglichen Lebens eingesetzt und haben seit ihrer ersten Entwicklung im Jahr 1960 viele neue
Forschungsgebiete erschlossen [1]. Je nach Anwendungsbereich werden verschiedene Lasertypen, wie z.B. Festkörper-, Gas- oder Farbstofflaser, verwendet. Das
Grundprinzip ist jedoch bei allen Lasern gleich. In einem aktiven Lasermedium
werden Besetzungsinversionen zwischen verschiedenen Energieniveaus erzeugt.
Durch stimulierte Emission kann dann einfallende Strahlung kohärent und gerichtet verstärkt werden. Durch diese kohärente Verstärkung ist sowohl die Frequenz
als auch die Phase der emittierten Laserstrahlung über große Zeiträume konstant.
Das aktive Medium befindet sich meist in einem optischen Resonator, welcher
dafür sorgt, dass die erzeugten Photonen wiederholt das Lasermedium durchlaufen, wobei ein Teil der erzeugten Strahlung aus dem Resonator ausgekoppelt wird.
Die in dieser Arbeit verwendeten Laser werden für die Erforschung und Untersuchung von quantenoptischen Prozessen in Festkörpern verwendet, welche
z.B. für die optische Datenspeicherung genutzt werden können [2]. Die benötigte
Wellenlänge hängt dabei von den physikalischen Effekten ab, welche untersucht
werden sollen. Wichtig ist hierbei neben der emittierten Wellenlänge auch die
Linienbreite des Lasers. Die Linienbreite ist ein Maß für die Breite des Frequenzspektrums, welches vom Laser emittiert wird. Eine Ursache von Linienverbreiterungen sind beispielsweise kleine Schwankungen der Laserfrequenz. Je kleiner die
Linienbreite des Lasers, umso besser können z.B. gezielt bestimmte Übergänge in
einem Medium angesprochen werden. Da die Linienbreite im Allgemeinen einen
großen Einfluss auf Präzision und Resultate physikalischer Untersuchungen hat,
beschäftigt sich ein großer Teil der Forschung damit, Frequenzschwankungen und
Linienbreiten von Lasern zu minimieren.
Es existieren verschiedene Verfahren, um die Frequenz eines Lasers zu stabilisieren. Meist wird der Laserstrahl mit einer externen stabilen Referenz verglichen,
um so Änderungen der Frequenz detektieren und korrigieren zu können.
Eine oft verwendete Methode, welche einen externen Resonator als Referenz
verwendet, ist das Pound-Drever-Hall Verfahren [3]. Mit diesem ist es möglich,
Abweichungen der Laserfrequenz von der Resonanzfrequenz des Resonators zu
detektieren und dann die Frequenz des Lasers über verschiedene Regelelemente
zu korrigieren. Wie dies geschieht, hängt von der Art des Lasers ab.
Als weitere Möglichkeit kann man das Absorptionsverhalten des Lasers in einem
geeigneten Medium detektieren. Mit Hilfe der Sättigungsspektroskopie ist es dann
1
Kapitel 1. Einleitung
möglich, den Laser auf einen bestimmten Übergang des verwendeten Mediums zu
stabilisieren [4].
In dieser Arbeit soll ein Verfahren untersucht werden, welches im Gegensatz
zu den oben erwähnten Beispielen keine externe Referenz verwendet. Stattdessen
nutzt man ein zeitlich verzögertes Signal des Lasers selbst als Referenz, um relative Frequenzänderungen zu detektieren.
Diese Änderungen werden anschließend durch einen elektronischen Regelkreis
verarbeitet und mit Hilfe eines Akustooptischen Modulators (AOM) wird die Frequenz des Laserstrahls angepasst. Da keine externe Referenz verwendet wird, ist
eine absolute Frequenzstabilisierung nicht möglich. Kleine Schwankungen der
Frequenz und Phase, sogenannte Jitter, können allerdings sehr schnell korrigiert
werden.
Dieses Verfahren zur Detektion von Frequenz- und Phasenschwankungen wird
mittels einer optischen Faser zur Erzeugung eines zeitlich verzögerten Signals
realisiert. Es kann dabei sowohl zur Korrektur von Frequenzsprüngen im Bereich
von einigen Megaherz [5] als auch zur Stabilisierung hochpräziser Lasersysteme
verwendet werden [6] [7] [8]. Bei kleinen Linienbreiten der verwendeten Laser
spielen jedoch weitere Faktoren wie ein durch die Verzögerungsfaser verursachtes Rauschen der Laserfrequenz und -phase eine Rolle [6]. Das hier vorgestellte
Prinzip der Laserstabilisierung kann in einer abgewandelten Form auch gezielt zur
Korrektur von durch optischen Fasern verursachtes Rauschen verwendet werden
[9].
Ziel dieser Arbeit ist einerseits, einen solchen optischen Aufbau zur Detektion
und Korrektur von Frequenz- und Phasensprüngen zu realisieren und zu charakterisieren, als auch verschiedene Möglichkeiten der elektronischen Regelung zu
untersuchen.
2
Kapitel 2. Theoretische Grundlagen
Kapitel 2
Theoretische Grundlagen
In diesem Kapitel soll genauer auf die Ursachen von Linienbreiten eingangen werden, insbesondere den Einfluss von Frequenzschwankungen des Lasers auf die
Linienbreite. Außerdem wird der optische Aufbau zur Detektion und Korrektur
von Frequenzänderungen vorgestellt sowie anschließend mehrere Möglichkeiten
zur Realisierung einer elektronischen Regelstrecke sowie deren Vor- und Nachteile
erläutert.
2.1
Linienbreite eines Lasers
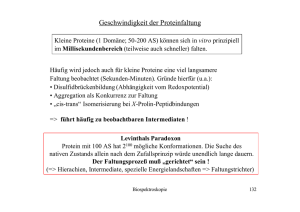
Da die Linienbreite eines Lasers eine wichtige Kenngröße bei der Untersuchung
physikalischer Prozesse ist, soll zunächst auf einige Effekte eingegangen werden,
welche bei den hier verwendeten Lasern zu Linienverbreiterungen führen. Auch
die Ursachen der bereits erwähnten Frequenz- und Phasenschwankungen werden
erklärt.
Natürliche Linienbreite
Das Grundprinzip eines Lasers beruht auf der stimulierten Emission. Durch einen
Pumpvorgang, der z.B. optisch geschehen kann, wird eine Besetzungsinversion
zwischen Energieniveaus erreicht. Nun kann ein einfallendes Photon durch stimulierte Emission ein weiteres Photon gleicher Energie und somit gleicher Wellenlänge erzeugen. Da die gepumpten Niveaus nur eine endliche Lebensdauer besitzen
ist durch die Energie-Zeit-Unschärferelation der Quantenmechanik auch die Energie und somit auch die Frequenz der emittierten Strahlung nicht unendlich scharf
definiert. Man spricht von der natürlichen Linienbreite.
Linienbreiten von Lasermedien
Je nach verwendetem Lasermedium tragen jedoch andere Effekte deutlich stärker
zur Linienbreite bei. Bei Farbstofflasern können die Energieniveaus der Atome
durch Wechselwirkung mit benachbarten Atomen verändert werden. Bei Festkörperlasern werden die Atome durch das Feld der umliegenden Atome beeinflusst.
Bei einem kristallinen Festkörper variiert dieses Feld aufgrund von Gitterschwingungen und ändert somit die Energieniveaus der Atome. Bei gasförmigen Lasermedien unterscheiden sich die Relativgeschwindigkeiten der Atome bzw. Moleküle
3
Kapitel 2. Theoretische Grundlagen
stark. Aufgrund des optischen Dopplereffekts ergibt sich somit eine Breite des gemessenen Emissionsspektrums.
Die durch solche Effekte verursachten Linienbreiten liegen je nach verwendetem
Lasermedium in der Größenordnung von GHz bis THz. [10].
Linienbreite des Laserresonators
Neben dem eigentlichen Lasermedium ist der Resonator ein zentrales Element des
Lasers. Zur Vereinfachung wird im Folgenden ein Resonator aus zwei parallelen
Spiegeln betrachtet, wobei ein Spiegel teildurchlässig ist. Damit eine bestimmte
erfüllen,
Wellenlänge λ verstärkt wird, muss diese die Resonatorbedingung L = n·λ
2
wobei L die Länge des Resonators und n eine natürliche Zahl ist. Somit wird die
Intensität des Lasers in wenigen Resonatormoden gebündelt. Der Abstand zweier
Moden ∆ν = 2Lc wird als freier Spektralbereich des Resonators bezeichnet. Die
p
Linienbreite δν der Moden wird durch die sogenannte Finesse F = π1−RR bestimmt,
welche in guter Näherung nur von der Reflektivität R der Spiegel abhängt. Die
.[1]
Linienbreite der Moden ergibt sich somit zu δν = ∆ν
F
Frequenzjitter und Phasensprünge
Die verwendeten Lasermedien geben durch ihre Linienbreiten somit einen maximal nutzbaren Wellenlängenbereich vor, die eigentliche Linienbreite des Lasers
wird jedoch durch den Resonator bestimmt. In modernen Lasern befinden sich im
Resonator eine Vielzahl zusätzlicher optischer Elemente, welche der weiteren Frequenzselektion dienen. Wie gezeigt wurde, hängt die emittierte Wellenlänge sowie
die Linienbreite eines Lasers von der Länge des Resonators ab. Durch mechanische Vibrationen oder Temperaturschwankungen und den daraus resultierenden
Dichteschwankungen der Luft kann sich die Resonatorlänge jedoch geringfügig
ändern, sodass es zu kleinen Frequenzänderungen des Lasers kommt. Andererseits können Frequenzschwankungen aber auch durch eine geeignete Regelung,
welche die Resonatorlänge ständig korrigiert, minimiert werden.
Da bei Messungen nicht die instantane Linienbreite des Lasers von Bedeutung
ist, sondern die über den Messzeitraum integrierte Linienbreite, wird diese üblicherweise in Kombination mit einem Zeitintervall angegeben. Mit steigender Zeit
nimmt somit auch die Linienbreite zu, wobei je nach betrachtetem Zeitintervall
unterschiedliche Mechanismen für die Linienverbreiterung verantwortlich sind.
Temperaturschwankungen spielen beispielsweise erst auf großen Zeitskalen eine
Rolle wohingegen Vibrationen auf kleinen Zeitskalen von Bedeutung sind.
Da mehrere kleine Frequenzsprünge nach der Integration über ein bestimmtes
Zeitintervall zu einer größeren Linienbreite führen, ist es mit der in dieser Arbeit
vorgestellten Frequenzstabilisierung auch möglich, die Linienbreite des Lasers zu
verkleinern.
4
Kapitel 2. Theoretische Grundlagen
2.2
Frequenzstabilisierung
Im Folgenden soll zunächst der grundlegende optische Aufbau zur Detektion und
Korrektur von Frequenzänderungen des Lasers vorgestellt werden. Anschließend
wird eine Methode zur Frequenz- und Phasenstabilisierung eines regelbaren Oszillators auf ein Referenzsignal vorgestellt und erläutert, wie diese zur Frequenzstabilisierung des Lasers adaptiert werden kann.
2.2.1
Heterodyne Messmethode
Der optische Aufbau zur Detektion von Phasen- und Frequenzänderungen des
Lasers ist in Abbildung 2.1 dargestellt. Dieser ist analog zu einem Mach-ZehnderInterferometer. Der Laserstrahl wird zunächst durch einen Beamsampler in zwei
Strahlen aufgeteilt. Ein Teilstrahl wird mittels einer optischen Faser um die Zeit τ D
verzögert, die Frequenz des zweiten Teilstrahls wird durch einen AOM um νAOM
verschoben. Anschließend werden beide Strahlen wieder überlagert. Da die Frequenz des Lasers zeitlich nicht konstant ist entsteht eine Schwebung der beiden
überlagerten elektrischen Felder. Mit einer schnellen Photodiode wird nun dieses
Schwebungssignal gemessen. Diese Messmethode wird als verzögerte heterodyne
Detektion (engl: delayed self heterodyne method, kurz: DSHM) bezeichnet.
Abbildung 2.1: Schematische Darstellung des optischen Aufbaus der verzögerten heterodynen Messmethode.
Das Schwebungssignal enthält Informationen der Frequenz- und Phasenänderung
des Lasers über den Zeitraum τ D . Somit ist es möglich, die optischen Informationen über Frequenz- und Phasenänderung in ein Radiofrequenzsignal (RF-Signal)
zu übertragen, welches durch eine elektronische Regelstrecke verarbeitet werden
kann. Das Signal dieser Regelstrecke kann dazu genutzt werden, Frequenz- und
Phasensprünge des Lasers wieder zu korrigieren. Hier wird diese Korrektur mit
Hilfe eines Akustooptischen Modulators (AOM) durchgeführt.
5
Kapitel 2. Theoretische Grundlagen
Die elektrischen Felder der beiden Teilstrahlen EAOM und E Faser lassen sich wie folgt
beschreiben:
E Faser ∼ sin ω L (t − τ D ) · t + ϕ(t)
(2.1)
EAOM ∼ sin (ω L (t) + 2πνAOM ) · t
(2.2)
Hierbei ist ω L (t) die zeitabhängige Frequenz des Lasers und ϕ(t) der Phasenunterschied beider Strahlen.
Das Schwebungssignal der Photodiode I P D ist proportional zur optischen Leistung der beiden Strahlen, wobei konstante Terme ignoriert wurden, da diese von
der Messelektronik nicht verarbeitet werden. Ebenfalls wurden Terme großer Frequenz vernachlässigt, da diese entweder nicht von der Photodiode detektiert werden können oder durch die nachfolgende Elektronik herausgefiltert werden.
2
I P D ∼ EAOM + E Faser
(2.3)
∼ cos((ω L (t − τ D ) − ω L (t) −2πνAOM ) · t + ϕ(t))
{z
}
|
:=∆ω(t)
∼ cos (∆ω(t) − 2πνAOM ) · t + ϕ(t)
(2.4)
Die Größe ∆ω(t) ist dabei die Frequenzänderung des Lasers im Zeitintervall
τ D , welche zusammen mit dem Phasenunterschied ϕ (t) für die Korrektur von
Frequenz- und Phasensprüngen von zentraler Bedeutung ist.
Akustooptischer Modulator
Der AOM ist bei der oben beschriebenen DSHM-Messung ein zentrales Bauteil.
Auch bei dem in dieser Arbeit vorgestellten Aufbau zur Stabilisierung des Lasers
werden Frequenzänderungen mit Hilfe eines AOM korrigiert, weshalb im Folgenden die Funktionsweise sowie wichtige Eigenschaften dieses Bauteils vorgestellt
werden.
Der Aufbau eines AOM ist in Abbildung 2.1 skizziert: Innerhalb des AOM durchläuft der Laserstrahl einen Kristall. An einer Seite des Kristalls befindet sich ein
Piezoelement, welches mit einem Hochfrequenzsignal (HF-Signal) der Frequenz
νAOM betrieben wird. Das Piezoelement erzeugt dadurch eine akustische Welle mit
der Frequenz des HF-Signals in dem Kristall. An der gegenüberliegenden Seite
befindet sich ein Absorber, um Reflexionen zu verhindern. Durch die im Kristall
propagierende akustische Welle ändert sich der Brechungsindex periodisch. Diese
periodischen Modulationen des Brechungsindexes entsprechen einem optischen
Gitter, an dem der Laserstrahl gebeugt wird. Es entstehen mehrere Beugungsordnungen n ∈ Z, deren Frequenz um n · νAOM verschoben ist. Somit können die Frequenz und der Ablenkwinkel des Laserstrahls variiert werden. Eine wichtige Kenngröße des AOM ist hierbei die Ansprechzeit (engl. rise time). Bei einem Strahldurchmesser von 1 mm und einer Schallgeschwindigkeit des Kristalls von 4200 ms
braucht die Schallwelle ca. 240 ns bis die Gitterkonstante im kompletten Bereich
des Strahldurchmessers geändert wurde. Durch den Einsatz von Linsen kann der
Strahldurchmesser im AOM verkleinert werden, was die Anstiegszeit deutlich reduzieren kann.
6
Kapitel 2. Theoretische Grundlagen
Die Intensität der Beugungsordnungen kann durch Justieren des AOM variiert
werden, jedoch wird meist nur die erste beziehungsweise die minus erste Beugungsordnung verwendet, da die Intensität hier am größten ist.
2.2.2
Phasenregelschleife
Im Folgenden soll die Idee einer Phasenregelschleife (engl. phase locked loop,
kurz: PLL) vorgestellt werden. Es handelt sich hierbei um eine Schaltung, mit der
die Frequenz und Phase eines spannungsgesteuerten Oszillators (engl. voltage
controlled oscillator, kurz: VCO) auf ein externes Referenzsignal stabilisiert werden können. Dieses Prinzip kann auf ein optisches System übertragen werden, um
dort die Frequenz des Lasers zu stabilisieren.
Abbildung 2.2: Schematischer Aufbau einer Phasenregelschleife.
Der grundlegende Aufbau einer Phasenregelschleife ist in Abbildung 2.2 dargestellt: Ein Phasen-Frequenz-Detektor (kurz: PFD) erkennt einen Phasen- bzw.
einen Frequenzunterschied zwischen dem Ausgangssignal des Spannungsgesteuerten Oszillators und dem Referenzsignal. Bei einer solchen Abweichung gibt
der Detektor ein Ausgangssignal aus, welches durch einen Filter aufbereitet wird
und anschließend als Eingangssignal für den VCO dient. Der Filter hat dabei die
Funktion eines Integrators. Das Ausgangssignal des VCO wird erneut mit dem
Referenzsignal verglichen und der VCO bei Abweichungen der Phase oder Frequenz sofort nachgeregelt. Dieses Verfahren ist in technischen Anwendungen weit
verbreitet und wird beispielsweise bei Mikroprozessorschaltungen genutzt. Als
Referenz wird meist ein sehr frequenz- und phasenstabiler Oszillator verwendet.
Durch eine Phasenregelschleife ist es so in Kombination mit weiteren Bauelementen wie Frequenzteilern möglich, Taktsignale verschiedener Frequenz zu erzeugen,
welche alle stabil zum Referenzsignal sind.
Da die Information über Frequenz- und Phasenabweichungen des Lasers, wie in
Kapitel 2.1 beschrieben, in ein RF-Signal übertragen werden können, kann eine Phasenregelschleife auch zur Frequenzstabilisierung eines Lasers verwendet
werden.
Frequenz- und Phasendetektor
Da die Detektion von Phasen- und Frequenzunterschieden große Bedeutung bei
einer Phasenregelschleife hat, soll im Folgenden die Funktionsweise eines digitalen Detektors vorgestellt werden. Im darauf folgenden Abschnitt wird auf eine
weitere Möglichkeit zur Detektion von Phasen- und Frequenzunterschieden eingegangen.
7
Kapitel 2. Theoretische Grundlagen
Die beiden Signale werden im Detektor, wie in Abbildung 2.3 schematisch gezeigt, verarbeitet: Eine logische Schaltung steuert einen Ausgang abhängig von
der Reihenfolge, mit welcher die Anstiegsflanken der Signale am PFD eintreffen.
Bei einem reinen Phasenunterschied besteht das Ausgangssignal des PFD aus
gleichen Pulsen, die Pulsbreite ist dabei proportional zur Phasendifferenz. Bei
unterschiedlichen Frequenzen dominieren die positiven bzw. negativen Signale.
Durch einen Filter, welcher durch einen Tiefpass realisiert werden kann, werden diese Signalpulse nun integriert. Das Ausgangssignal des PFD zeigt somit
einen Frequenz- bzw. Phasenunterschied beider Eingangssignale an. Der Filter
bestimmt dabei das Regelverhalten der Phasenregelschleife maßgeblich. Es werden beispielsweise die Zeiten zwischen einer Phasen- oder Frequenzänderung
und der Korrektur durch die Regelschleife sowie das Überschwingverhalten des
Regelsignals durch den Filter bestimmt.
Abbildung 2.3: Schematische Darstellung der Ausgangssignale des Phasendetektors vor
dem Filter bei Phasen- (links) oder Frequenzunterschied (rechts).
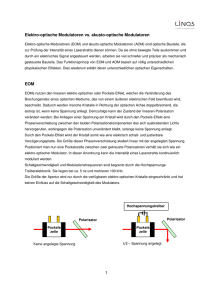
Phasendetektion durch Frequenzmischung
Eine weitere Methode zur Detektion von Phasenunterschieden lässt sich durch
einen elektronischen Mischer realisieren. Bei zwei Eingangssignalen mit den Frequenzen f1 und f2 erzeugt ein Mischer durch Multiplikation beider Signale ein
Frequenzgemisch, welches die Summenfrequenz f1 + f2 sowie die Differenzfrequenz f1 − f2 enthält.
Das Schwebungssignal I P D der Photodiode aus Kapitel 2.1 kann mit Hilfe eines
Mischers mit der AOM-Frequenz νAOM gemischt werden. Man spricht von Demodulation des Signals.
Die Eingangssignale des Mischers sind:
I P D ∼ cos (∆ω(t) − 2πνAOM ) · t + ϕ(t)
IAOM ∼ sin 2πνAOM · t
(2.5)
(2.6)
Das Fehlersignal φer r or am Ausgang des Mischers ergibt sich nun wie folgt:
φer r or = I P D · IAOM
(2.7)
∼ cos(∆ω(t) · t + ϕ(t)) − cos((∆ω(t) − 2 · (2πνAOM )) · t + ϕ(t))
{z
} |
|
{z
}
Summenfrequenz
8
Differenzfrequenz
Kapitel 2. Theoretische Grundlagen
Mit der Annahme, dass die Änderung der Frequenz des Lasers ∆ω(t) im Zeitraum
τ D deutlich kleiner als die Frequenz des AOM νAOM ist, ist die Differenzfrequenz
deutlich größer als die Summenfrequenz. Über einen geeigneten Tiefpass lässt sich
der hochfrequente Term eliminieren, wodurch sich das Fehlersignal zu
φer r or ∼ cos ∆ω(t) · t + ϕ(t)
(2.8)
ergibt. Das Fehlersignal ist somit nur von Frequenz- und Phasenänderungen des
Lasers abhängig. Somit können in Kombination mit einer weiteren Regelelektronik
diese Änderungen detektiert und anschließend korrigiert werden [6] [7].
2.2.3
Laserstabilisierung mittels einer Phasenregelschleife
Mit Hilfe des in Kapitel 2.2.1 beschriebenen interferometrischen Aufbaus ist es
möglich, Phasen- und Frequenzabweichungen eines Lasers zu detektieren. Das
Prinzip einer Phasenregelschleife soll nun, wie in Abbildung 2.4 gezeigt, in diesen
Aufbau adaptiert werden, um die Frequenz des Lasers zu stabilisieren.
Das Signal der Photodiode enthält, wie bereits beschrieben, die optischen Informationen über Phasen- und Frequenzänderung des Lasers, ist jedoch zusätzlich
mit der Frequenz des AOM moduliert. Durch Vergleichen des Photodiodensignals
mit einem zeitlich frequenz- und phasenstabilen Oszillator können nun Sprünge
in der Laserfrequenz detektiert werden. Der VCO, der wie bereits beschrieben
vom gefilterten Eingangssignal des PFD bzw. des Mischers gesteuert wird, ist nun
nicht direkt mit dem Eingang des PFD verbunden, sondern dient als Quelle für den
AOM. Ändert sich nun die Frequenz oder Phase des Lasers, so wird diese Änderung
vom Phasendetektor oder Mischer erkannt. Das Fehlersignal wird anschließend
mit Hilfe eines Filters integriert. Dieser Filter kann als Tiefpass realisiert werden.
Mit diesem Signal kann nun die Frequenz des VCO und somit über den AOM
auch die Frequenz des Lasers korrigiert werden. Auch ungewollte Phasen- und
Frequenzänderungen des VCO werden so über den Regelkreis korrigiert.
Abbildung 2.4: Schematische Darstellung der Laserstabilisierung.
9
Kapitel 3. Experimenteller Aufbau
Kapitel 3
Experimenteller Aufbau
Im folgenden Kapitel soll erläutert werden, wie die im bisherigen Teil der Arbeit
gezeigten Methoden experimentell zum Aufbau einer Laserstabilisierung umgesetzt wurden. Zuerst wird dabei auf den optischen Aufbau, anschließend auf die
elektronische Regelstrecke eingegangen.
3.1
Optischer Aufbau
Der optische Aufbau ist in Abbildung 3.1 schematisch dargestellt. Der Laserstrahl
gelangt von einem der verwendeten Lasersysteme über eine Faser zu dem beschriebenen Aufbau. Es stehen zwei verschiedene Lasersysteme zur Verfügung,
welche beide Strahlung der Wellenlänge λ = 606 nm emittieren:
• Ein Farbstofflaser (Sirah Matisse DX), welcher von einem Festkörperlaser (Coherent Verdi V10) gepumpt wird. Der Laser ist bereits duch eine
Pound Drever Hall Stabilisierung vorstabilisiert. Die Linienbreite liegt bei ca.
100 kHz auf einer Zeitskala von 100 ms.
• Ein Optisch Parametrischer Ozillator (OPO) mit Summenfrequenzmischung
zur Erzeugung der benötigten Wellenlänge, welcher von einem Faserlasersystem gepumpt wird. Da sich das System teilweise noch im Aufbau befindet,
ist noch keine Vorstabilisierung implementiert. Die Linienbreite liegt deshalb
zur Zeit deutlich über der des Farbstofflasers.
Im Aufbau wird der Strahl zunächst durch den AOM (AA-Optoelectronics MT80B30A1-VIS) gebeugt. Die nullte Beugungsordnung wird anschließend in die Verzögerungsfaser (Thorlab 630 HP) eingekoppelt. Im Vergleich zu dem in Kapitel 2.2.1
beschriebenen Aufbau hat dies den Vorteil, dass mehr Leistung in der 1. Beugungsordnung zur Verfügung steht. Die Verzögerungsfaser hat eine Länge von 300 m,
was einer Verzögerungszeit von τ D = 1, 5 µs entspricht. Sowohl der Strahl der
Faserstrecke, als auch die erste Beugungsordnung des AOM durchlaufen eine λ/2Platte. Durch einen Beamsampler wird ein kleiner Teil der erste Beugungsordnung
ausgekoppelt und mit dem Strahl der Faserstrecke überlagert. Die erste Beugungsordnung wird anschließend durch eine weitere Faser zum eigentlichen Experiment geleitet. Die beiden überlagerten Strahlen durchlaufen einen polarisierenden Strahlteiler (engl. polarising beamsplitter, kurz: PBS), um zu gewährleisten,
dass nur Licht der gleichen Polarisation zur Photodiode gelangt. Dies ist wichtig, da nur Strahlung gleicher Polarisation ein Schwebungssignal erzeugen kann.
10
Kapitel 3. Experimenteller Aufbau
Der vom PBS reflektierte Anteil beider Strahlen wird durch eine Faser zu einem
Wellenlängemessgerät geleitet, was zur Überwachung der emittierten Wellenlänge
des Lasers dient. Mit Hilfe der beiden λ/2-Platten kann die Polarisation der beiden überlagerten Strahlen separat verändert und so das Schwebungssignal gezielt
maximiert werden.
Abbildung 3.1: Schematische Darstellung des optischen Aufbaus.
3.2
Elektronischer Aufbau
Wie bereits in Kapitel 2.2 erwähnt, können mehrere Realisierungsmöglichkeiten
der elektronischen Regelstrecke verwendet werden. Im Weiteren wird zunächst ein
elektronischer Aufbau mit einem Mischer zur Detektion von Phasenabweichungen
und anschließend ein Aufbau mit einem digitalen Phasen- und Frequenzdetektor
vorgestellt.
Stabilisierung mittels Frequenzmischung
Der elektronische Aufbau zur Stabilisierung eines VCO auf eine Referenzfrequenz
ist in Abbildung 3.2 dargestellt. Das Ausgangssignal des zu regelnden Oszillators
wird durch den Mischer mit dem Referenzsignal demoduliert. Als VCO wird dabei ein AOM-Treiber (Brimrose VFA-80-60-VCO) mit einem nutzbaren Frequenzbereich von ca. 60 bis 100 MHz und einer Zentralfrequenz von 80 MHz verwendet.
Zur Detektion von Phasen- und Frequenzunterschieden wird ein Frequenzmischer
11
Kapitel 3. Experimenteller Aufbau
(Minicircuits ZLW-3) mit einem Frequenzbereich von 0.025 bis 200 MHz verwendet. Als Referenz dient ebenfalls ein VCO (Brimrose VFA-80-60-VCO), um durch
Änderungen der Referenzfrequenz das Regelverhalten untersuchen zu können.
Das Ausgangssignal des Mischers wird anschließend in einem digitalen Regelmodul (Toptica DigiLock 110) zuerst durch einen Tiefpass gefiltert und anschließend
von einem Proportional-Integral Regler (PI-Regler) verarbeitet. Dieses Regelmodul
bietet die Möglichkeit, Signale entweder durch eine digitale Schaltung oder durch
analoge Elemente zu verarbeiten. Das Ausgangssignal des Regelmoduls wird dabei
zur Steuerung des VCO verwendet.
Abbildung 3.2: Schematischer Aufbau zur Untersuchung der elektronischen Regelstrecke.
Zur Detektion von Unterschieden zwischen VCO und Referenzsignal wird ein analoger Mischer verwendet.
Zur Stabilisierung des Lasers wird das Ausgangssignal des VCO, wie in Abbildung
3.3 zu sehen, nicht direkt durch den Mischer demoduliert, sondern zur Modulation
der Laserfrequenz durch den AOM genutzt. Das Signal der Photodiode wird durch
einen Verstärker (Femto Voltage Amplifier DHPVA) mit einer maximalen Frequenz
von 100 MHz sowie einer einstellbaren Verstärkung von 10 bis 60 dB verstärkt
und als Eingangssignal für den Mischer verwendet.
Abbildung 3.3: Schematischer Aufbau der elektronischen Regelstrecke zur Stabilisierung
des Lasers. Zur Detektion von Unterschieden zwischen VCO und Referenzsignal wird ein
analoger Mischer verwendet.
12
Kapitel 3. Experimenteller Aufbau
Stabilisierung mittels eines Frequenz- und Phasendetektors
Zur Stabilisierung eines VCO mittels eines digitalen Phasen- und Frequenzdetektors wird der in Abbildung 3.4 schematisch gezeigte Aufbau verwendet. Der verwendete Detektor (RF Bay PDF-100) mit einem Frequenzbereich von 3 bis 300
MHz besitzt bereits einen integrierten Filter. Der Detektor vergleicht dabei den
Frequenz- und Phasenunterschied zwischen dem Referenzoszillator und dem VCO.
Über das Ausgangssignal des Detektors wird der VCO angesteuert, sodass dieser
bei Abweichungen von der Referenzfrequenz nachgeregelt wird.
Abbildung 3.4: Schematischer Aufbau zur Untersuchung der elektronischen Regelstrecke.
Zur Detektion von Unterschieden zwischen VCO und Referenzsignal wird ein digitaler
Phasen-Frequenz-Detektor verwendet.
In Abbildung 3.5 ist der Aufbau zur Stabilisierung des Lasers schematisch dargestellt. Das Ausgangssignal des VCO wird dabei als Quelle für den AOM genutzt.
Das Ausgangssignal der Photodiode wird verstärkt (Femto Voltage Amplifier DHPVA) und als Eingangssignal des Detektors verwendet.
Abbildung 3.5: Schematischer Aufbau der elektronischen Regelstrecke zur Stabilisierung
des Lasers. Zur Detektion von Unterschieden zwischen VCO und Referenzsignal wird ein
digitaler Phasen-Frequenz-Detektor verwendet.
13
Kapitel 4. Experimentelle Ergebnisse
Kapitel 4
Experimentelle Ergebnisse
4.1
Charakterisierung des experimentellen Aufbaus
Um zu überprüfen, ob der in Kapitel 3 vorgestellte optische Aufbau in den bereits bestehenden experimentellen Aufbau integriert werden kann, sind mehrere
Kenngrößen zu untersuchen:
• Das Verhältnis der optischen Leistung vor und nach dem gesamten optischen
Aufbau zur Stabilisierung. Hierbei dürfen keine zu großen Leistungsverluste
auftreten, um für die Experimente, für die der Laser verwendet wird, ausreichend Leistung zur Verfügung zu haben.
• Die Leistung am Experiment muss bei Variation der AOM-Frequenz in einem zur Stabilisierung ausreichend großen Bereich konstant bleiben, um
anschließende Experimente nicht zu beeinflussen.
Die Intensität des zur Detektion von Abweichungen verwendeten Schwebungssignals darf in diesem ermittelten Bereich nur in einem für die nachfolgende Messelektronik akzeptablen Bereich schwanken.
In diesem Kapitel sollen diese Kenngrößen untersucht sowie Optimierungsmöglichkeiten genannt werden.
Leistungsverluste durch den optischen Aufbau
In diesem Abschnitt soll nun auf die Verluste einzelner Komponenten des optischen
Aufbaus eingegangen werden, insbesondere auf das Verhältnis zwischen der am
Experiment nutzbaren und der vom Laser zur Verfügung gestellten Leistung. Für
diese Messungen wurde der Farbstofflaser (Sirah Matisse DX) verwendet.
Die optische Leistung nach der Faser mit welcher der Laserstrahl zum optischen
Aufbau geleitet wird, betrug Pin = 350 mW, was auch der Eingangsleistung am
AOM entspricht. Die Leistung der ersten Beugungsordnung des AOM betrug
295 mW (84 % der Eingangsleistung). Am Beamsampler wurden 8 mW der ersten
Beugungsordnung ausgekoppelt (2,7 %). Die am Ende der Stabilisierungsstrecke
vor dem Faserkoppler zum Experiment verfügbare Leistung betrug 266 mW, was
76 % der Eingangsleistung enstpricht.
Neben den Verlusten der ersten Beugungsordnung sind die Leistungen der Strahlen für das Schwebungssignal für die eigentliche Stabilisierung wichtig.
14
Kapitel 4. Experimentelle Ergebnisse
Die Leistung der nullten Beugungsordnung, welche auch in die Verzögerungsfaser
eingekoppelt wurde, betrug 21 mW (6 % der Leistung vor dem AOM). Nach der
Faser betrug die Leistung 1 mW, was einer Dämpfung von 95 % entspricht. Die
dB
vom Hersteller angegebene Dämpfung durch die Faser beträgt 12 km
, was bei 300
Metern Faserlänge einer Dämpfung von 3,6 dB (ca. 57 %) entspricht. Die größten
Verluste treten somit durch die Faserkoppler auf.
Die optische Leistung vor der Photodiode betrug 1,4 mW (0,4 % der Leistung des
Lasers) vom frequenzverschobenen Strahl (1. Beugungsordnung) und 0,25 mW
(0,07 % der Laserleistung) vom Strahl der Verzögerungsstrecke. Die Stärke des
Schwebungssignals bei einer Frequenz von 80 MHz betrug -50 dBm.
Nach dem gesamten Aufbau zur Stabilisierung stehen somit noch ca. 75 % der
Laserleistung zur Verfügung. Nicht berücksichtigt wurden Verluste durch optische
Fasern, um den Strahl zum Experiment zu leiten. Die Verluste des Aufbaus werden
hauptsächlich durch die Beugungsordnungen des AOM verursacht, wobei die gemessenen Werte mit dem maximal erreichbaren Wirkungsgrad übereinstimmen,
welcher vom Hersteller angegeben wird.
Das Schwebungssignal der Photodiode ist mit -50dBm bei einem Verstärker mit
einer maximalen Verstärkung von 60dB und einer durchschnittlich benötigten
Eingangsleistung der elektronischen Bauteile von 0 dBm ausreichend stark.
Einkoppeleffizienzen
Bei einer Frequenzänderung am AOM ändert sich auch der Ablenkwinkel der Beugungsordnungen und somit auch die Position des Strahls vor dem Faserkoppler
und der Photodiode. Dies stellt zum einen ein Problem bei der Einkopplung des
Hauptstrahls in den Faserkoppler zum Experiment dar, zum anderen verringert
sich der Strahlüberlapp auf der Photodiode und somit auch die Stärke des Schwebungssignals. Um die durch den optischen Aufbau limitierte Frequenz des AOM zu
ermitteln, wurden mehrere Messungen durchgeführt, bei denen für verschiedene
AOM-Frequenzen die optische Leistung am Experimentiertisch bzw. die Leistung
des Schwebungssignals der Photodiode aufgezeichnet wurde. In Abbildung 4.1 ist
die Leistung des Lasers am Experiment (rot) und des Schwebungssignals der Photodiode (schwarz) über der Frequenz des AOM aufgetragen. In Abbildung 4.2 sind
beide Kennlinien in einem kleineren Frequenzbereich um 80 MHz zu sehen. Zu beachten ist, dass die Stärke des Schwebungssignals der Photodiode um ca. 1 dBm
(ca. 20 %) schwankt. Diese Schwankungen sind jedoch messtechnisch bedingt und
nicht auf ein Schwanken der Leistung der Photodiode zurückzuführen.
15
Kapitel 4. Experimentelle Ergebnisse
Abbildung 4.1: Einkoppeleffizienz (rot) und Stärke des Schwebungssginals (schwarz) in
Abhängigkeit der AOM Frequenz in dem durch die optische Leistung am Experiment limitierten Bereich.
Abbildung 4.2: Einkoppeleffizienz (rot) und Stärke des Schwebungssginals (schwarz) in
Abhängigkeit der AOM Frequenz mit konstantem Bereich der optischen Leistung.
16
Kapitel 4. Experimentelle Ergebnisse
In Abbildung 4.1 ist deutlich zu erkennen, dass die Einkoppeleffizienz der Faser
die maximale Frequenzbreite des AOM beschränkt. In Abbildung 4.2 ist ein kleinerer Frequenzbereich um 80 MHz aufgetragen. In einem Bereich von 100 kHz um
80,05 MHz kann die Einkoppeleffizienz als konstant angenommen werden, was
bei einer Linienbreite des Lasers von 100 kHz über einen Zeitraum von 100 ms für
die Stabilisierung ausreichend ist.
Wie oben erwähnt, hängen die Einkoppeleffizienzen von der Winkeländerung und
somit von der Weglänge zwischen AOM und Faserkoppler bzw. Photodiode ab.
Diese Wege sind im hier verwendeten Aufbau mit jeweils ca. 60 cm sehr groß.
Die Abstände wurden gezielt so groß gewählt, um den Aufbau flexibel für Änderungen der optischen Strahlführung zu halten. Bei einem späteren Aufbau wird
die Strahlführung deutlich kürzer ausfallen, was die Einkoppeleffizienzen deutlich verbessern wird. Die Einkoppeleffizienz der Faser ist jedoch bereits bei diesem
Aufbau groß genug.
Wie in Kapitel 3.2 erklärt wurde, sollte die Stärke des Schwebungssignals bei dem
hier verwendeten Verstärker über -60 dBm liegen, was der Fall ist. Somit ist dieser
Aufbau zur Stabilisierung der Laserfrequenz geeignet.
4.2
Stabilisierung durch Frequenzmischung
Im Weiteren soll auf die Stabilisierung mit einem elektronischen Mischer eingegangen werden. Eine Kenngröße der Elektronik stellt die Laufzeit von Signalen,
auch Latenzzeit genannt, dar. Je kleiner die Latenzzeit der gesamten elektronischen Regelstrecke ist, desto schneller können Änderungen des Lasers detektiert
und korrigiert werden. Diese Latenzzeit stellt somit eine wichtige Kenngröße des
Aufbaus dar, weshalb sie im Folgenden näher diskutiert wird.
Anschließend wird erläutert, wie mit diesem Verfahren ein VCO in einem rein elektronischen Regelkreis auf einen Referenzoszillator stabilisiert wurde.
Schließlich wird darauf eingegangen, wie dieser rein elektronische Aufbau zur
Regelung der Frequenz des Lasers adaptiert wurde.
Latenzzeiten der elektronischen Komponenten
Um die Latenzzeit des Mischers zu bestimmen, wurde dieser mit zwei Oszillatoren
verbunden, wobei der Ausgang eines Oszillators periodisch an und aus geschaltet
wurde. In Abbildung 4.3 ist das Triggersignal, durch das der Oszillator geschaltet
wurde, sowie das Ausgangssignal des Mischers zu sehen.
Die Latenzzeit beträgt, wie in Abbildung 4.3 zu erkennen, ca. 60 ns. Da der Frequenzunterschied zwischen beiden Oszillatoren im Bereich von mehreren Megahertz lag, ist das in Abbildung 4.3 gezeigte Ausgangssignal des Mischers ebenfalls
sehr hochfrequent.
17
Kapitel 4. Experimentelle Ergebnisse
Abbildung 4.3: Triggersignal zum Schalten des Oszillators und Ausgangssignal des Mischers zur Bestimmung der Latenzzeit des Mischers.
Es ist zu beachten, dass die Länge der verwendeten Kabel bei diesen Zeiten einen
nicht zu vernachlässigenden Einfluss hat. Die Signallaufzeit der verwendeten
BNC-Kalbel kann mit 5 ns
abgeschätzt werden. Da die verwendeten Kabellängen
m
im Bereich von einigen Metern liegen, ist der angegebene Wert von 60 ns für die
Latenzzeit des Mischers somit als obere Grenze anzusehen. Zusätzlich ist in dieser
Zeit die Reaktionszeit des VCO enthalten. Da der Mischer jedoch bei den folgenden Messungen in Kombination mit dem gleichen VCO verwendet wurde und die
Kabellängen von mehreren Metern bedingt durch den experimentellen Aufbau
nicht reduziert werden konnten, ist es sinnvoll, die Latenzzeit des Mischers in
Kombination mit dem VCO anzugeben.
Die Latenzzeit des zur Regelung verwendeten Regelmoduls (Digilock 110) wird
vom Hersteller mit 200 ns angegeben, wobei der digitale Teil des Regelmoduls
genutzt wurde. Die Latenzzeit dieses digitalen Teils ist zwar deutlich größer als die
des analogen Teils, dieser bietet jedoch einen deutlich gößeren Funktionsumfang.
Inklusive der verwendeten Kabel liegt die Latenzzeit der kompletten Regelelektronik somit im Bereich von 300 ns.
Die Anstiegszeit des AOM wird vom Hersteller mit maximal 160 ns angegeben. Eine Fokussierung des Laserstrahls zur Verringerung der Anstiegszeit war
aufgrund der vom Hersteller angegebenen maximalen Leistungsdichte im AOM
nicht möglich.
Die Latenzzeit des Verstärkers liegt dem Hersteller zufolge im Bereich von wenigen
18
Kapitel 4. Experimentelle Ergebnisse
Nanosekunden, weshalb die gesamte Latenzzeit der Regelstrecke zur Stabilisierung des Lasers mit 450 ns abgeschätzt werden kann.
Durch die verwendete Verzögerungsfaser wird der Laserstrahl um τ D = 1,5 µs
verzögert. Die Latenzzeit der Regelstrecke muss deutlich unter dieser Verzögerungszeit liegen, was der Fall ist.
Untersuchung der elektronischen Regelstrecke
Zur Untersuchung des rein elektronischen Regelkreises wurde der in Kapitel 3.2
beschriebene Aufbau verwendet. Das Ausgangssignal des Mischers wurde dabei
als Eingangssignal des Regelmoduls DigiLock 110 verwendet. Durch einen integrierten Tiefpass wurde das Signal zunächst gefiltert und anschließend von dem
digitalen PI-Regler verarbeitet. Anschließend wurde eine konstante Spannung von
4,6 V zu dem Regelsignal addiert und dieses als Steuersignal für den VCO verwendet.
Durch den Integralteil des Reglers ist es möglich, den VCO auf die Frequenz des
Referenzsignals zu stabilisieren. In Abbildung 4.4 ist das Eingangssignal des Regelmoduls vom Mischer (schwarz) sowie das Ausgangssignal des Moduls, welches
zur Steuerung des VCO dient (rot), zu sehen. Die Ausgangsspannung von ca. 4,9 V
entspricht dabei einer VCO-Frequenz von ca. 80 MHz. Wie zu erkennen ist, oszilliert das Eingangssignal mit einer Periode von ca. 20 µs, was bei dieser Momentaufnahme einer Abweichung des VCO vom Referenzoszillator von ca. 50 kHz
entspricht.
Abbildung 4.4: Eingangssignal und Ausgangssignal des Regelmoduls DigiLock 110.
19
Kapitel 4. Experimentelle Ergebnisse
Um das Regelverhalten dieses Systems zu untersuchen, wurden Frequenzabweichungen durch eine Änderung des Referenzsignals simuliert. Hierzu wurde die
Frequenz des Referenzsignals in unterschiedlich großen Schritten um die Frequenz
von 80 MHz variiert. Bei Frequenzsprüngen im Bereich von ca. 20 kHz konnte die
Frequenz des VCO auf das Referenzsignal nachgeregelt werden. Dies zeigt, dass
bei Frequenzsprüngen im Bereich von 20 kHz eine Detektion der Richtung der
Frequenzabweichung möglich ist. Auch große Frequenzänderungen des Referenzsignals von einigen MHz können nachgeregelt werden, solange die Änderung der
Frequenz langsam genug stattfindet. Bei größeren Sprüngen der Referenzfrequenz
arbeitet die Regelung jedoch nicht mehr stabil und kann den VCO nicht auf die
Referenzfrequenz regeln. Dies ist damit zu begründen, dass bei großen Frequenzabweichungen beider Eingangssignale des Mischers die Richtung der Frequenzabweichung nicht mehr detektiert werden kann (vgl. 2.2.2).
Stabilisierung des Lasers
Zur Stabilisierung des Lasers wurde das Ausgangssignal des VCO als Quelle für
den AOM verwendet. Das Signal der Photodiode wurde um 50 dB verstärkt und
als Eingangssignal des Mischers benutzt.
In Abbildung 4.5 ist das Schwebungssignal der Photodiode bei einer zeitlich konstanten Frequenz des AOM von 80 MHz gezeigt. Die Stärke des Signals beträgt
-53 dBm, die Halbwertsbreite bei -56 dBm beträgt 5 kHz bei einem Auflösungsvermögen des Spektrumanalysators von 1kHz.
Abbildung 4.5: Schwebungssignal der Photodiode mit zeitlich konstanter AOM-Frequenz
von νAOM = 80 MHz
20
Kapitel 4. Experimentelle Ergebnisse
Wie bereits bei der rein elektronischen Regelstrecke war es auch hier möglich, die
Frequenz des AOM mit dem PI-Regler zu stabilisieren. Um Frequenzänderungen
zu simulieren, wurde erneut die Frequenz des Referenzsignals verändert, wobei
die Frequenz des AOM bei kleinen Frequenzsprüngen von ca. 20 kHz nachgeregelt
werden konnte.
Die in Kapitel 2.2 beschriebene Methode zur Stabilisierung des Lasers mittels
eines elektrischen Mischers kann, wie gezeigt wurde, zur Stabilisierung des Lasers auf eine Referenzfrequenz verwendet werden. Auch kleine Frequenzsprünge
von einigen kHz können geregelt werden. Bei großen Frequenzsprüngen ist eine
Regelung der Frequenz jedoch nicht mehr möglich.
4.3
Stabilisierung mit einem digitalen Phasendetektor
Als weitere Methode zur Frequenzstabilisierung wurde ein digitaler Phasen- und
Frequenzdetektor untersucht. Analog zu Kapitel 4.2 wurde zunächst ein rein elektronischer Aufbau zur Stabilisierung eines VCO auf ein Referenzsignal untersucht
und dieser anschließend zur Stabilisierung der Laserfrequenz auf ein Referenzsignal adaptiert.
Untersuchung der elektronischen Regelstrecke
Zur Untersuchung der elektronischen Komponenten wurde der in Kapitel 3.2 beschriebene Aufbau verwendet. Die Eingänge des Phasendetektors wurden dabei
mit dem zu regelnden VCO sowie dem Referenzoszillator verbunden.
Der Detektor kann unabhängig von der Größe der Frequenzunterschiede beider
Eingangssignale die Richtung der Frequenzabweichung detektieren. Bei Sprüngen
der Referenzfrequenz ist somit immer eine stabile Regelung des VCO auf die Referenzfrequenz möglich.
Von großer Bedeutung ist jedoch das Verhalten des Ausgangssignals des Detektors
bei Frequenzsprüngen. Dieses wird durch die Reaktionszeit zwischen Frequenzänderung und Beginn des Nachregelns, der Anstiegszeit des Regelsignals sowie der
Zeit bis das System eingeschwungenen ist, bestimmt. Diese Größen werden maßgeblich durch den bereits integrierten Filter beeinflusst, sodass keine Änderungen
an diesen Charakteristika vorgenommen werden konnten.
In Abbildung 4.6 ist die Anstiegsflanke des Regelsignals des Detektors bei einem
Frequenzsprung des Referenzoszillators aufgetragen. Die Anstiegszeit ist dabei definiert als die Zeit, in der das Regelsignal des Detektors von 10 % auf 90 % der
Spannung (im eingeschwungenen Zustand) angestiegen ist. Zusätzlich sind in der
Abbildung die Spannungen vor und nach der Frequenzänderung als Geraden aufgetragen, welche durch Mittelwertbildung über einen Bereich von ca. 60 µs bei
noch nicht veränderter Referenzfrequenz bzw. in einem eingeschwungenen Bereich berechnet wurden. Nicht berücksichtigt wird bei der Anstiegszeit das Überschwingverhalten des Regelkreises.
21
Kapitel 4. Experimentelle Ergebnisse
Abbildung 4.6: Triggersignal zur Steuerung der Frequenz des Referenzoszillators und Regelsignal des Detektors.
Die Anstiegszeiten unterscheiden sich bei verschieden großen Frequenzsprüngen
des Referenzoszillators nur geringfügig und liegen in einem Bereich von (5 ± 1)µs.
Die Zeitspanne zwischen Änderung der Frequenz des Referenzoszillators (Triggersignal) und einem Nachregeln des Detektors liegt im Bereich von (4 ± 1)µs.
Stabilisierung des Lasers
Zum Stabilisieren der Laserfrequenz wurde der Ausgang des VCO mit dem AOM
verbunden und das verstärkte Schwebungssignal der Photodiode als Eingangssignal des Detektors verwendet, wie in Kapitel 3.2 beschrieben wurde. In Abbildung
4.7 ist das Regelsignal der Regelstrecke abgebildet. Es ist zu erkennen, dass die
Einschwingzeit der Regelstrecke deutlich über 40 µs liegt.
Zusätzlich ist in Abbildung 4.8 das Schwebungssignal der Photodiode gezeigt, wobei das Referenzsignal des Detektors 80 MHz betrug. Die Halbwertsbreite des
Signals beträgt ca. 1,5 MHz. Dies ist durch das um einige mV variierende Ausgangssignal des Detektors zu erklären. Diese Schwankungen bei einem konstanten
Referenzsignal sind auch in Abbildung 4.7 für negative Zeiten zu erkennen.
Das Prinzip der Frequenzstabilisierung durch einen digitalen Phasen- und Frequenzdetektor ist zur Stabilisierung eines VCO auf ein Referenzsignal geeignet.
Da die Richtung der Frequenzabweichung detektiert werden kann, ist eine stabile
Regelung möglich. Die Genauigkeit der Regelung sowie das Verhalten bei Frequenzänderungen hängen jedoch stark von dem verwendeten Filter ab. Die Anstiegsund Einschwingzeiten des hier verwendeten Detektors sind mit über 50 µs sehr
22
Kapitel 4. Experimentelle Ergebnisse
groß, was jedoch auf den bereits integrierten Filter zurückzuführen ist. Durch
Wahl eines besser geeigneten Filters können diese Zeiten deutlich reduziert werden.
Abbildung 4.7: Anstiegsflanke des Regelsignals bei der Stabilisierung der Laserfrequenz.
Abbildung 4.8: Schwebungssignal der Photodiode bei Regelung des AOM mit dem Phasendetektor und konstanter Referenzfrequenz von 80 MHz.
23
Kapitel 5. Zusammenfassung und Ausblick
Kapitel 5
Zusammenfassung und Ausblick
In dieser Arbeit wurde eine Methode zur Übertragung der optischen Information von Phasen- und Frequenzänderungen eines Lasers in ein elektrisches Signal
vorgestellt. Weiterhin wurden verschiedene Methoden zur elektronischen Verarbeitung dieses Signals erläutert und gezeigt, wie dieses Signal zur Regelung von
Laserfrequenz und -phase mit Hilfe eines Akustooptischen Modulators verwendet
werden kann.
Zunächst wurde ein optischer Aufbau zur Detektion von Sprüngen der Laserfrequenz und -phase sowie deren Korrektur realisiert. Durch die anschließende
Untersuchung des Aufbaus konnte gezeigt werden, dass dieser hierfür geeignet
ist. Aufgrund der geringen Leistungsverluste ist eine spätere Implementierung des
Aufbaus in das bereits bestehende Lasersystem möglich.
Um die Laserfrequenz auf ein externes Referenzsignal zu stabilisieren, wurden
zwei verschiedene Realisierungsmöglichkeiten der elektronischen Regelstrecke
vorgestellt. Zunächst wurde ein analoger Mischer zur Detektion von Frequenzund Phasenänderungen verwendet. Es konnte gezeigt werden, dass dieser zusammen mit einem digitalen Proportional- und Integralregler sowohl zur Stabilisierung eines spannungsgesteuerten Oszillators als auch der Laserfrequenz
auf ein externes Referenzsignal verwendet werden kann, solange die Frequenzänderungen nicht zu schnell stattfinden. Als weitere Möglichkeit zur Detektion
von Frequenz- und Phasenunterschieden wurde ein digitaler Detektor verwendet.
Auch hier konnte gezeigt werden, dass mit diesen sowohl eine Stabilisierung eines spannungsgesteuerten Oszillators als auch der Laserfrequenz auf ein externes
Referenzsignal realisiert werden kann.
Bei diesen Untersuchungen des optischen Aufbaus zeigten sich verschiedene Optimierungsmöglichkeiten:
• Die Wegstrecken des hier verwendeten optischen Aufbaus wurden zu Testzwecken sehr groß gehalten. Ein späterer Aufbau würde deutlich kompakter
ausfallen, was vor allem die untersuchten Einkoppeleffizienzen verbessern
würde.
• Die Anstiegszeit eines AOM kann durch den Einsatz von Linsen zur Fokussierung deutlich gesteigert werden. Aufgrund der vom Hersteller angegebenen
maximalen Leistungsdichte war eine Fokussierung des Laserstrahls bei dem
verwendeten Bauteil jedoch nicht möglich.
24
Kapitel 5. Zusammenfassung und Ausblick
• Da die Länge der zur Verzögerung genutzten optischen Faser einen wesentlichen Einfluss auf die Stabilisierung des Lasers hat [7], sind hier weitere
Untersuchungen notwendig.
Um eine gute Stabilisierung der Frequenz zu erreichen, ist es notwendig, dass die
Signallaufzeiten (Latenzzeiten) der elektronischen Komponenten kurz sind. Diese
könnten wie folgt verbessert werden:
• Zur Stabilisierung mittels Frequenzmischung wurde ein digitaler Regler verwendet, weshalb die Latenzzeiten mit mehreren hundert Nanosekunden
sehr hoch sind. Durch den Einsatz von rein analogen Bauelementen, welche
Schaltzeiten von deutlich unter hundert Nanosekunden erreichen, ließe sich
die Latenzzeit stark reduzieren und die Ergebnisse somit verbessern.
• Die Regelzeiten des verwendeten digitalen Detektors sind aufgrund des integrierten Filters sehr groß. Die mit diesem Bauteil erzielten Ergebnisse bei
der Stabilisierung des Lasers auf eine externe Referenz waren nicht ausreichend. Weitere Untersuchungen eines solchen Bauteils mit einem variablen
Filter sind notwendig.
Für beide Methoden zur Detektion und Korrektur von Frequenzänderungen des
Lasers konnte experimentell gezeigt werden, dass diese prinzipiell hierfür geeignet sind. Weiterführend ist nun eine Verbesserung der Elektronik sowie eine abschließende Untersuchung der mit diesem Aufbau erreichbaren Verbesserung der
Linienbreite erforderlich.
25
Literaturverzeichnis
Literaturverzeichnis
[1] W. Demtröder Experimentalphysik 3: Atome, Moleküle und Festkörper Springer
(2005)
[2] G. Heinze, A. Rudolf, F. Beil, T. Halfmann Storage of images in atomic coherences in a rare-earth-ion-doped solid Phys. Rev. A 81 (2010)
[3] R. Drever, J. Hall, F. Kowalski, J. Hough, G. M. Ford, A. Munely, und H. Ward
Laser Phase and Frequency Stabilization Using an Optical Resonator Appl. Phys.
B 31, 97 (1983)
[4] W. Demtröder Laser Spectroscopy, Vol. 2 : Experimental Techniques Springer
(2008)
[5] C. Greiner, B. Boggs, T. Wang, und T. W. Mossberg Laser frequency stabilization by means of optical self-heterodyne beat-frequency control Opt. Lett. 23 (16)
(1998)
[6] F. Kéfélian, H. Jiang, P. Lemonde und G. Santarelli Ultralow-frequency-noise
stabilization of a laser by locking to an optical fiber-delay line Opt. Lett. 34 (7)
(2009)
[7] H. Jiang, F. Kéfélian, P. Lemonde, A. Clairon und G. Santarelli An agile laser with ultra-low frequency noise and high sweep linearity Opt. Express 18 (4)
(2010)
[8] V. Crozatier, G. Gorju, F. Bretenaker, J. Gouët und I. Lorgeréb Phase locking of
a frequency agile laser Appl. Phys. 89, 261115 (2006)
[9] I. Ernsting Entwicklung und Anwendung eines Frequenzkamm-basierten Lasersystems für die Präzisions-Spektroskopie an ultrakalten Molekülen und Atomen
Dissertation, Universität Düsseldorf (2009)
[10] Eichler: Laser: Bauformen, Strahlführung, Anwendungen Springer (2006)
[11] H. Tsuchida Simple technique for improving the resolution of the delayed selfheterodyne method Opt. Lett. 15 (11), 640 (1990)
26
Erklärung zur Bachelor-Thesis
Hiermit versichere ich, die vorliegende Bachelor-Thesis ohne Hilfe Dritter nur mit
den angegebenen Quellen und Hilfsmitteln angefertigt zu haben. Alle Stellen, die
aus Quellen entnommen wurden, sind als solche kenntlich gemacht. Diese Arbeit
hat in gleicher oder ähnlicher Form noch keiner Prüfungsbehörde vorgelegen.
Darmstadt, den 23. Juli 2012
(Nikolaus Lorenz)