Ein konstitutives Modell für dielektrische Elastomere
Werbung

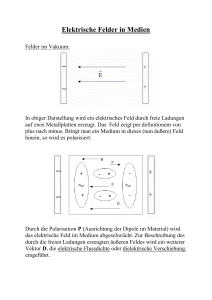
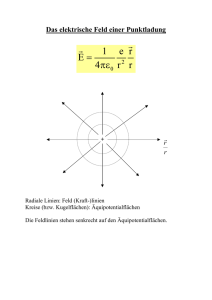
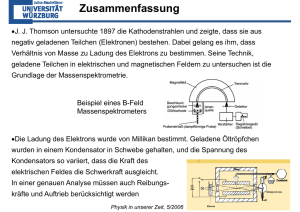
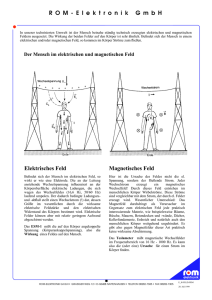
Diplomarbeit Ein konstitutives Modell für dielektrische Elastomere - theoretische Aufarbeitung und Finite-Element Implementierung J. Barth Dielektrische Elastomere Grundlagen Sie zählen zu den so genannten adaptiven Strukturen bzw. aktiven Funktionsmaterialien (eng. „smart materials“), genauer gesagt zu den Elektroaktiven Polymeren (EAP). Diese können mit Hilfe einer elektrischen Spannung zu einer Materialausdehnung gezwungen werden. Da sie dem natürlichen Muskelgewebe in Stellweg und Kraft sehr ähnlich sind, werden sie auch als künstliche Muskeln, englisch „artificial muscles“, bezeichnet. Es wird versucht, mit Hilfe von EAPs künstliche Muskeln herzustellen, die in Robotern eingesetzt werden können. Ein zurzeit noch futuristischer Gedanke ist der Einsatz solcher künstlich hergestellten Muskeln als Implantate im menschlichen Körper. [1] Da es sich um ein elektrostatisches Problem handelt, müssen die verschiedenen Theorien beachtet werden. Zu ihnen gehören die Newtonsche Mechanik, die MaxwellGleichungen und die Lorentz-Kraft. Daraus ergeben sich die wesentlichen Beziehungen eines Dielektrikums, welche durch die relevanten Feldgleichungen, Randbedingungen und konstitutiven Gleichungen beschrieben werden. Diese lauten © Yoseph Bar-Cohen. Bionic - bionic humans using eap as artificial muscles - reality and challenges. ARS-Journal Abb. 1: Eine große Herausforderung ist die Entwicklung von Robotern, die durch EAPs betrieben werden. Funktionsweise von EAP Dielektrika sind vom elektrischen Feld abhängig, da sie die Fähigkeit besitzen, unter Einwirkung eines elektrischen Feldes zu polarisieren. Dabei richten sich die im Material befindlichen Dipole unter Einfluss eines äußeren elektrischen Feldes so aus, dass sie entgegengesetzt parallel zu diesem Feld stehen, wie in Abbildung 2 zu sehen. a) b) Beispiel Eine eingespannte Schale wird durch ein elektrisches Potential belastet. Dabei besteht diese aus zwei Schichten, bei der jeweils nur die Ober- bzw. Unterseite einer Schicht belastet wird, während die andere geerdet ist. Die belastete Schicht will sich ausdehnen, wird aber von der geerdeten behindert. So entsteht eine Biegung in die jeweilige Richtung, wie in Abbildung 3 zu sehen. Abb. 2: a) Ausrichten der Dipole im elektrischen Feld b) Aufbau, Funktionsweise Plattenkondensator Durch den sich so einstellenden Verschiebungsstrom entsteht ein Druck in Richtung des elektrischen Feldes und das elastische Elastomer wird in Dickenrichtung zusammengepresst. Gleichzeitig dehnt es sich seitlich so weit aus, bis sich ein Gleichgewicht zwischen dem resultierenden elektrischen Druck und den Materialspannungen einstellt. Sobald die äußere elektrische Spannung ausgeschaltet wird, verschwinden auch die elektrostatischen Kräfte und das dielektrische Elastomer kehrt zurück in seine Ausgangslage bzw. -form. Statik und Dynamik der Tragwerke Prof. Dr.-Ing. S. Klinkel Abb. 3: Allgemeines Vorgehen, Verformung versch. Belastungsschritte Quelle: [1] Helmut Schlaak, Peter Lotz, Marc Matysek. Muskeln unter Hochspannung - Antriebe mit elektroaktiven Polymeren. thema FORSCHUNG, 2/2006:68-73