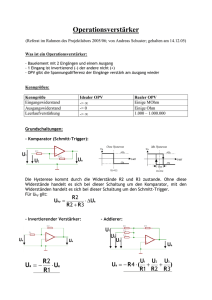
Dokumentation Mechatronik
Werbung

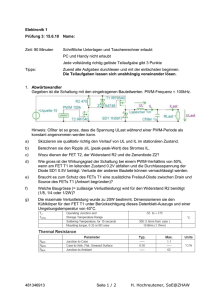
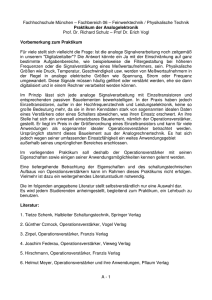
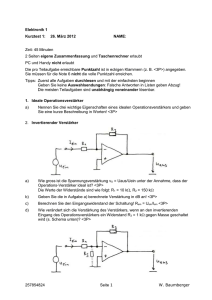
Mechatronik Barbara Zimmermann Wir befinden uns irgendwo in der fernen Zukunft. Die Rebellen kämpfen gegen die böse Macht des Empires. Die Lage scheint aussichtslos. Doch es gibt Hoffnung: R2D2. Denn der Roboter trägt eine geheime Nachricht von Prinzessin Leia an den Rebellenführer. Doch was hat das alles mit unserem Mechatronik-Kurs zu tun? Ganz einfach: Der zwölfköpfige Kurs mit unseren Kursleitern Friederike und Wolfhard hat sich StarWars-begeistert ein hohes Ziel gesetzt: Wir beschlossen, R2D2 nicht in der Zukunft zu lassen, sondern ihn hier im Jahre 2008 zwar nicht durch eine Zeitreise, aber dafür durch Mechatronik „zum Leben“ zu erwecken. Aber wahrscheinlich werden die wenigsten mit dem Begriff Mechatronik etwas anfangen können. Also hier eine kurze Erklärung: Mechatronik zeichnet sich besonders durch Interdisziplinarität aus. Hier werden Elemente aus Mechanik, Elektronik und System- und Informationstechnik miteinander verknüpft. Beispiele für Anwendungsbereiche sind unter anderem automatisierte Getriebe, Computer- Festplattenlaufwerke, Digitalkameras oder eben auch Roboter-Systeme. Somit ist Mechatronik der ideale Ansatz für unser Vorhaben, den berühmten Roboter R2D2 zu bauen. Der große Vorteil der Mechatronik liegt darin, dass Ingenieure nicht nur auf einem Gebiet ausgebildet werden, sondern einen Überblick über verschiedene an der Produktion von elektrischen Geräten beteiligte Teilbereiche haben. Natürlich fehlte uns das erforderliche Hintergrundwissen und so verbrachten wir die ersten zweieinhalb Tage mit einer Auffrischung oder wohl eher Erweiterung unserer physikalischen Kenntnisse. Der erste Teilbereich, dem wir uns widmeten, war die Elektronik. Dabei lernten wir unter anderem wie ein Kondensator, eine Spule oder ein Transistor aufgebaut sind und wirken. Außerdem wurden uns Grundkenntnisse im Programmieren mit der Programmiersprache LabVIEW vermittelt. Am zweiten Tag wurden wir vertraut mit den Newtonschen Gesetzen und bemühten uns, die Drehmomente und sonstigen Kräfte auszurechnen, die auf einen Körper wirken. Am dritten Tag erfolgte die Einteilung in die Gruppen, die sich mit den unterschiedlichen Teilbereichen beschäftigen sollten, die zur Aktivierung von R2D2 nötig waren. Eine Gruppe widmete sich dem Fahrwerk, um dafür zu sorgen, dass R2D2 in der Lage ist sich zu bewegen. Natürlich wollten wir R2D2 auch mit der Umwelt interagieren lassen. Daher übernahm eine andere Gruppe die Aufgabe einen Greifarm zu konstruieren, der den Roboter unter anderem dazu befähigte, zu winken oder beliebigen Leuten die Kaffeetasse aus der Hand zu schlagen… Um mit R2D2 kommunizieren zu können, war es selbstverständlich auch nötig, ihm das Sprechen „beizubringen“ und an seinem Kopf eine Kamera und verschiedene aus Leuchtdioden bestehende Lampen anzubringen. Die dritte Gruppe übernahm diesen Aufgabenbereich. Inzwischen ist R2D2 fertig und er ist ein wirklich liebenswerter Kerl geworden, den keiner der Mechatroniker mehr missen möchte. In fast allen Punkten ist er unseren Ansprüchen und Zielen gerecht geworden. Aber bis dahin war es ein langer Weg mit einigen Problemstellungen. Dieser Weg und die Ergebnisse sollen im Folgenden präsentiert werden. Viel Spaß beim Verstehen von R2D2!!! Quellen http://de.wikipedia.org/wiki/Mechatronik http://news.cad.de/index.php?option=com_content&task=view&id=177&Itemid=143 Der ohmsche Widerstand Johannes Thewes Der elektrische Widerstand ist ein Maß dafür, welche elektrische Spannung nötig ist um einen bestimmten elektrischen Strom durch einen Leiter fließen zu lassen. Das Zeichen ist „R“ und der Widerstand hat die Einheit „Ohm“ mit dem Einheitenzeichen Ω. Ein ohmscher Widerstand ist ein spezieller elektrischer Widerstand, dessen Widerstandswert unabhängig von der Spannung, der Stromstärke und der Frequenz ist, wobei der Quotient aus der über dem Widerstand abfallenden Spannung und dem durch ihn fließenden Strom konstant den Widerstandswert ergibt. Daher gilt an einem ohmschen Widerstand das Ohmsche Gesetz für beliebige Spannungen, Ströme und Frequenzen. Das Ohmsche Gesetz wird beschrieben durch die Formel R = U , I wobei R der Widerstandswert, U die angelegte Spannung und I der durch den Widerstand fließende Strom ist. An Widerständen fällt die Spannung in Richtung des Stromflusses ab, wobei die elektrische Energie in Wärmeenergie umgewandelt wird. Die Widerstände werden normalerweise dazu benutzt den Stromfluss zu begrenzen oder Spannungen anzupassen, da viele Bauelemente nur mit spezifischen Spannungen oder Strömen arbeiten. Spannungsteiler Abbildung 1.1: Schaltplan eines Spannungsteilers Ein Spannungsteiler (Abb. 1.1) ist eine Reihenschaltung zweier Widerstände, bei der die Teilspannung an einem der Widerstände als Ausgangsspannung betrachtet wird. Da durch beide Widerstände der gleiche Strom fließt gilt nach dem Ohmschen Gesetz: U = (R 1 + R 2 ) ⋅ I U 1 = R1 ⋅ I U 2 = R2 ⋅ I Eingesetzt: U 2 = R 2 ⋅ U R1 + R 2 =U ⋅( R2 R1 + R 2 ) Stromteiler Auf der anderen Seite gibt es aber auch die Möglichkeit mithilfe zweier parallel geschalteter Widerstände einen Stromteiler (Abb. 1.2) zu bauen, in dem die Spannung konstant ist. I I1 U I2 R1 R2 I Abbildung 1.2: Schaltplan eines Stromteilers Nach dem Ohmschen Gesetz gilt: U R1 U I2 = R2 I1 = I = I1 + I2 = U ⋅ R2 U ⋅ R1 R + R2 U U + = + =U ⋅( 1 ) R1 R 2 R1 ⋅ R 2 R1 ⋅ R 2 R1 ⋅ R 2 Der Gesamtwiderstand beträgt dabei R = R ⋅R U = 1 2 I R1 + R 2 Der Kondensator Mareike Lauer Der Kondensator ist ein passives elektronisches Bauelement. Er wird dazu genutzt elektrische Ladung und die damit verbundene Energie zu speichern. Abbildung 1.3: Unterschiedliche Kondensatoren Wie in Abbildung 1.4 dargestellt, besteht ein Kondensator aus zwei elektrisch leitenden Flächen, den Elektroden, die meist nur einen geringen Abstand zueinander haben. In diesem Zwischenraum befindet sich ein Isolierstoff, den man als Dielektrikum bezeichnet. Im einfachsten Fall besteht das Dielektrikum aus Luft. Abbildung 1.4: Prinzipdarstellung eines Kondensators Die einfachste Bauform des Kondensators besteht aus zwei glatten, elektrisch leitfähigen, parallelen Platten mit elektrischen Anschlüssen. Wird nun eine Spannung an die Anschlüsse gelegt, entsteht zwischen den Elektroden ein elektrisches Feld. Dabei nimmt eine Platte positive und die andere negative Ladungen auf, die Ladungsmenge auf beiden Flächen ist identisch. Man unterscheidet zwischen gepolten und ungepolten Kondensatoren, wobei gepolte Kondensatoren zerstört werden, wenn die Spannung falsch herum angelegt wird. Das rührt vom inneren Aufbau dieser Kondensatoren her und macht sie nur für Gleichspannungen geeignet. Neben dem Kondensator zeigt jedes reale elektrische Bauelement ebenfalls kapazitive Effekte. Kapazität Die elektrische Kapazität ist die physikalische Größe, die die Fähigkeit des Kondensators definiert, elektrische Ladung zu speichern. Die elektrische Kapazität wird als Verhältnis der zugeführten Ladungsmenge Q zur entstandenen Spannung U bestimmt. Formelzeichen der Kapazität ist das C (lat. capacitas = Fassungsvermögen), sie wird in der Einheit Farad (kurz: F) gemessen, wobei sich die gebräuchlichsten Kapazitäten um die Größenordnungen µF (10-6 F), nF (10-9 F) oder pF (10-12 F) bewegen. Die Kapazität eines Kondensators wird durch seine baulichen Größen bestimmt. Die Kapazität C ist umso größer • je größer die Elektrodenoberfläche (A) • je kleiner der Elektrodenabstand (d) • je besser die Dipolbildung im Dielektrikum (je größer die relative Dielektrizitätszahl εr) ist. Allgemein gilt: Dielektrikum Das Dielektrikum besteht im einfachsten Fall aus Luft. Wenn andere Stoffe verwendet werden ändert sich die Dielektrizitätszahl. Je höher die Dielektrizitätszahl ist, desto höher die Kapazität oder kleiner die Kondensatorbauform. Dielektrikum εr Papier 2 Glimmer 5 Porzellan 6 Kondensatorkeramik 60-3000 Tabelle 1.1: Relative Dielektrizitätszahlen einiger Werkstoffe Kondensatoren im Gleichstromkreis Wenn ein ungeladener Kondensator über einen Widerstand an eine Gleichspannung angeschlossen wird, steigt die Spannung gemäß Abbildung 1.5 von Null auf ihren Maximalwert, die Stromstärke jedoch sinkt. Abbildung 1.5: Spannung und Stromstärke beim Aufladen des Kondensators Hat die Kondensatorspannung UC die Ladespannung Uges erreicht, fließt kein Strom mehr und der Kondensatorwiderstand ist unendlich groß. Der Kondensator wirkt wie eine Sperre für den Gleichstrom. Er ist jetzt aufgeladen. Beim Entladen sinkt die Spannung vom Maximum auf den Nullpunkt. Der Strom wechselt seine Flussrichtung (Polarität) und sinkt vom Maximalwert auf Null ab. Er fließt also in entgegengesetzter Richtung zum Ladestrom. Abbildung 1.6: Spannungskurve beim Laden und Entladen Kondensatoren im Wechselstromkreis Wenn man den Kondensator an eine Wechselspannung anlegt, kann man ihn als Filter für hohe oder niedrige Frequenzen nutzen. Weil nämlich bei anliegender Wechselspannung die Polarität ständig wechselt wird der Kondensator immer wieder geladen und entladen und es fließt Strom. Der Kondensator blockiert somit Gleichstrom und lässt nur Wechselstrom durch. Quellen http://de.wikipedia.org/wiki/Elektrische_Kapazit%C3%A4t 10.07.2008 http://de.wikipedia.org/wiki/Kondensator_(Elektrotechnik) 11.07.2008 http://www.elektronik-kompendium.de/sites/bau/0205141.html 11.07.2008 Schnabel, Patrick: „Elektronik-Fibel“, Ludwigsburg, 2006 Halbleiter Tobias Tebbi Halbleiter sind eine Stoffgruppe, die für die moderne Elektronik von absolut fundamentaler Bedeutung sind. Es sind Stoffe, die sowohl als Leiter als auch als Nichtleiter angesehen werden können. Im reinen Zustand sind sie bei geringer Temperatur Nichtleiter und werden mit steigender Temperatur zu Leitern. Diese Eigenschaft resultiert aus einem Kristallgitter, in dem alle Elektronen für die kovalente Bindung gebraucht werden und deshalb fest gebunden sind. Mit steigender Temperatur werden Elektronen freigesetzt, die dann als Ladungsträger dienen können. Eine weitere Möglichkeit zur Leitfähigkeitssteigerung besteht darin, andere Stoffe in das Kristallgitter einzubringen. Man spricht dabei ja nach Stoff von n- bzw. pDotierung. n-Dotierung Bei der n-Dotierung werden dem Halbleiter freibewegliche negative Ladungsträger hinzugefügt, indem Atome mit einem zusätzlichen Valenzelektron implantiert werden. Diese zusätzlichen Außenelektronen stehen nun als freie Elektronen für einen Stomfluss zur Verfügung. In Abbildung 1.7 wurde dem Halbleiter Silizium mit vier Valenzelektronen Phosphor mit fünf freien Elektronen zugesetzt, sodass ein Abbildung 1.7: n-dotiertes Si-Gitter ungebundenes Elektron vorhanden ist. p-Dotierung Hierbei werden Atome mit einem fehlenden Valenzelektron implantiert. In Abbildung 1.8 ist das Aluminium. Das benachbarte Si-Atom muss deshalb ein zusätzliches Elektron an sich binden, um Edelgaskonfiguration zu erreichen. Es fehlt also ein Elektron im Gitter. Diese Stellen werden als Abbildung 1.8: p-dotiertes Si-Gitter Löcher bezeichnet. Durch schrittweises Überspringen einzelner Elektronen von Loch zu Loch fungiert das Loch sozusagen als positiver Ladungsträger und bewegt sich mit der technischen Stromrichtung. Dieser Vorgang wird als Löcherleitung bezeichnet. Die Diode Eine Diode besteht aus zwei benachbarten Gebieten eines Halbleiters, die unterschiedlich dotiert sind. Dabei folgt auf eine n-dotierte Schicht eine pdotierte Schicht. Dieses Bauteil hat die besondere Eigenschaft, dass es Strom nur in einer Richtung Abbildung 1.9: Aufbau einer Diode leitet, was folgendermaßen zustande kommt: Im Grenzbereich zwischen n- und p-dotierter Schicht füllen sich die Löcher der p-dotierten Schicht mit den freien Elektronen der ndotierten Schicht. Diesen Vorgang nennt man Rekombination (Abb. 1.10). Es entsteht ein nichtleitender Abschnitt, in dem keine freien Abbildung 1.10: Diode mit Rekombination Ladungsträger vorhanden sind. Dieser Bereich wird als Raumladungszone bezeichnet, da die außerhalb verbleibenden elektrischen Ladungen ein elektrisches Feld bilden. Liegt nun an der p-dotierten Seite eine negative Spannung an und an der n-dotierten Seite eine positive Spannung, so verstärkt das entstehende elektrische Feld diesen Effekt, da noch mehr Elektronen in die Löcher des p-dotierten Ab- Abbildung 1.11: Sperrende Diode schnittes gelangen. Liegt die Spannung dagegen umgekehrt an, so hebt das elektrische Feld die Raumladungszone auf und die Diode wird leitend. Deshalb wird eine minimale Spannung von 0,6 V (bei einer Abbildung 1.12: Leitende Diode (physikalische Stromrichtung) Silizium-Diode) benötigt, damit überhaupt ein Strom fließt. Oberhalb dieser Spannung verhält sich die Diode nicht wie ein ohmscher Widerstand, denn der Strom steigt mit der Spannung nicht linear, sondern exponentiell. Der Verlauf einer solchen Kennlinie ist in Abbildung 1.13 dargestellt. Dioden dienen dazu, einen Strom richtungsabhängig zu leiten und können zum Beispiel benutzt werden, um einen Gleichrichter zu bauen. Dies ist ein Bauteil, das Wechsel- Abbildung 1.13: Kennlinie einer Diode bei verschiedenen Temperaturen spannung in Gleichspannung umwandelt. Das Schaltzeichen der Diode ist in Abbildung 1.14 dargestellt. Der Transistor Abbildung 1.14: Schaltbild einer Diode Der Transistor ist ein Halbleiterbauelement, das in Abhängigkeit eines geringen Eingangsstromes einen größeren Strom steuern kann. Dabei kann dieser Strom sowohl analog variiert als auch digital an- und ausgeschaltet werden. Ein Transistor besteht ähnlich wie die Diode aus n- und p- dotierten Bereichen eines Halbleiters, allerdings aus drei Schichten. Im Folgenden soll ein soge- Abbildung 1.15: Schema eines npn-Transistors nannter npn-Transistor behandelt werden. Ein Transistor besteht aus drei benachbarten Schichten mit den Anschlüssen Emitter, Basis und Kollektor. Bei einem npnTransistor bestehen diese dementsprechend aus n-, p- und n-dotierten Halbleiterschichten. Liegt an der Basis keine Spannung an, so wirkt der Transistor wie zwei entgegengesetzte Dioden und sperrt in beide Richtungen. Abbildung 1.16: Stromverhältnisse im Transistor (phys. Stromrichtung) Liegt die Basis auf dem Spannungsniveau des Emitters, so bildet der erste pnÜbergang (vom Emitter zur Basis) eine Raumladungszone aus und der Transistor sperrt. Liegt die Basis dagegen auf einem positiveren Niveau als der Emitter, so fließt ein Strom in die Basis und die die Elektronen können den ersten pn-Übergang passieren. Aufgrund ihrer Geschwindigkeit und der geringen Ausdehnung der Basis-Schicht passieren die meisten Elektronen die Basis ohne zu rekombinieren und gelangen in die n-leitende Kollektorschicht. So entsteht ein Kollektorstrom, wobei nach der techn. Stromrichtung der Strom vom Kollektor zum Emitter fließt. Es gibt auch pnp-Transistoren. Diese haben eine entgegengesetzte Schichtreihenfolge, wodurch die Vorzeichen umgekehrt werden. Die Schaltbilder des npn- bzw. pnp-Transistors sind rechts dargestellt. Dabei markiert der Pfeil immer den Emitter und die Basis ist seitlich an die vertikale Linie angeschlossen. Mit einem Transistor können Verstärker und Leitungsschalter aufgebaut werden. Darüber hinaus lassen sich logische Schaltungen realisieren, die die Grundlage für digitale Rechen- Abbildung 1.17: Schaltbilder von npn- und pnpTransistor maschinen darstellen. Quellen http://de.wikipedia.org/w/index.php?title=Halbleiter&oldid=48010013 12.07.2008 http://de.wikipedia.org/w/index.php?title=Diode&oldid=48259569 12.07.2008 http://de.wikipedia.org/w/index.php?title=Bild:Silizium-n-Dotiert.png&oldid=46667247 12.07.2008 http://de.wikipedia.org/w/index.php?title=Bild:Silizium-p-Dotiert.png&oldid=46667251 12.07.2008 http://de.wikipedia.org/w/index.php?title=Bild:Diode-Kennlinie_1N4001.gif&oldid=47452608 12.07.2008 http://commons.wikimedia.org/w/index.php?title=Image:Diode_Schaltzeichen.svg &oldid=10105208 12.07.2008 http://commons.wikimedia.org/w/index.php?title=Image:Bipolartransistor_Symbole.svg &oldid=10629993 12.7.08 Der Operationsverstärker Battull Safieddine Der Operationsverstärker ist ein wichtiges Bauteil der Elektronik und geht historisch weit in die Röhrentechnik zurück. Der Begriff Operationsverstärker stammt aus der Zeit, als man mathematische Operationen noch mit Analogtechnik durchführte. Er ist ein galvanisch gekoppelter Differenzverstärker, der sowohl Gleichspannung als auch Wechselspannung verstärken kann. Er wird mit OP, OV, OPV und OpAmp abgekürzt. Abbildung 1.18: Abbildung 1.19: Gehäuse eines OPs Schaltsymbol & Beschriftung Er besitzt einen invertierenden Minus- und einen nichtinvertierenden Plus-Eingang. Die Differenzspannung zwischen den Eingängen wird verstärkt und auf den Ausgang ausgegeben. Aufbau Abbildung 2.20: Aufbau eines Operationsverstärkers Als Eingangsstufe besitzen Operationsverstärker immer einen Differenzverstärker. Daraufhin folgt eine zweite Verstärkerstufe, die eine integrierte Frequenzgangkompensation enthält. Diese Kompensationsschaltung ist für die verstärkende Funktion eines OPs wichtig, denn sonst wäre er instabil. Nach der Verstärkerstufe folgt die Kurzschlusssicherung und am Ausgang dann ein Gegentaktverstärker. Schaltzeichen veraltet aktuell Abbildung 1.21: Schaltzeichen eines OPs Ansteuerung Abbildung 1.22: innerer Aufbau eines OPs Der Operationsverstärker wird oft symmetrisch mit 2 identischen Gleichspannungen betrieben. Häufige Betriebsspannungen liegen bei ±5V, ±12V und ±15V aber manchmal auch bei ±18V. Wenn der nichtinvertierende Eingang des Operationsver- stärkers gesteuert wird, so ist die Ausgangsspannung gleichpolig. Wird sein invertierender Eingang gesteuert, so ist die Ausgangsspannung zur Eingangsspannung gegenpolig. Da viele Operationsverstärker am Eingang keine höhere Spannung vertragen können als die Betriebsspannung beträgt, müssen bei Versuchszwecken zuerst die Eingangssignale entfernt werden, bevor die Betriebsspannung abgeschaltet wird. Idealer Operationsverstärker Der ideale Operationsverstärker ist ein stark vereinfachtes Modell, in dem alle parasitären Eigenschaften realer Operationsverstärker nicht in Betracht gezogen werden. Daher wird er vor allem bei einfachen Schaltungsberechnungen und Überschlagsrechnungen verwendet. Für komplexere Schaltungsberechnungen ist der ideale Operationsverstärker allerdings meistens ein zu stark vereinfachtes Bild. Ein idealer Operationsverstärker verfügt über folgende Eigenschaften: • unendlich große Spannungsverstärkung • unendlich hoher Eingangswiderstand • kein Eingangsstrom • Ausgangswiderstand gleich Null • Gleichspannungsverstärkung ohne Offsetspannung • kein Rückwirkung vom Ausgang auf den Eingang Realer Operationsverstärker Ideale OPs sind nicht herstellbar. Aufgrund dessen wird beim realen Bauteil versucht sich den idealen Eigenschaften weitgehend anzunähern. Jedoch sind in vielen Anwendungen ideale Eigenschaften gar nicht nötig. In solchen Situationen kann man von idealen Eigenschaften ausgehen: • Spannungsverstärkung liegt zwischen 160 000 und 1000 000 • der Eingangswiderstand beträgt ca. 1MΩ – 1GΩ • geringe Rückwirkung vom Ausgang auf den Eingang Grundschaltungen des Operationsverstärkers invertierender Operationsverstärker Man kann einen Operationsverstärker auch als invertierenden Verstärker beschalten. Dies geschieht folgendermaßen: Abbildung 1.23: Schaltbild eines invertierenden Operationsverstärkers Der Operationsverstärker erhöht seine Ausgangsspannung, solange eine Eingangsdifferenzspannung Ued nicht Null ist. Koppelt man den Ausgang auf den Eingang zurück, so ist der Operationsverstärker bestrebt die Differenzspannung zwischen Plus- und Minuseingang so gering wie möglich zu halten. Der Pluseingang liegt fest an Masse. Da der Minuseingang wegen U ed = 0 den gleichen Spannungspegel besitzen soll, wird am Minuseingang eine virtuelle Masse erzeugt. Der durch die Eingangsspannung hervorgerufene Strom durch R1 kann nicht einfach verschwinden, sondern muss irgendwohin fließen. Der Minuseingang ist dazu viel zu hochohmig, also muss er weiter zum Ausgang durch R2 hindurch fließen. Bei einer positiven Eingangsspannung muss daher die Ausgangsspannung negativ sein, denn von Masse (d.h. vom Minuseingang, der ja den gleichen Pegel führt wie der Pluseingang) kann der Strom nur zu einer Spannungsquelle (hier: OP-Ausgang) fließen, wenn diese eine negative Spannung besitzt. Der OP stellt daher die Ausgangsspannung genau auf den Wert, der erforderlich ist, damit an den beiden Eingängen keine Differenzspannung auftritt. Über die Spannungsteilerformel ergibt sich somit: vu = Ua R =− 1 Ue R2 Nichtinvertierender Operationsverstärker Der nicht invertierende Verstärker ist so beschaltet, dass das Ausgangssignal aus dem Eingangssignal durch Multiplikation mit einem konstanten positiven Faktor erzeugt wird. Abbildung 1.24: Schaltbild eines nichtinvertierenden Operationsverstärkers Am Pluseingang liegt die Eingangsspannung Ue, die wegen der Gegenkopplung auch am Minuseingang auftritt und damit am Knotenpunkt zwischen R1 und R2. Diese Spannung verursacht durch R1 einen Stromfluss I = Ue , der auch durch R2 fließen R muss. Es tritt also eine Ausgangsspannung von U a = I (R 1 + R 2 ) auf. Die Spannungsverstärkung beträgt daher: vu = U a I (R 1 + R 2 ) (R 1 + R 2 ) R = = =1+ 2 Ue I R2 R1 R1 Der Eingangswiderstand ist unendlich. Man sieht an der Formel, dass bei dieser Schaltung die Verstärkung nie kleiner eins werden kann. Quellen http://www.vias.org 11.07.2008 http://www.elektronik-kompendium.de 10.07.2008 http://www.spicelab.de 11.07.2008 http://de.wikipedia.org 10.07.2008 Der Schrittmotor Lena Marie Funke Der Rotor, der bei jedem Motor den sich bewegenden Teil bezeichnet, besteht beim Schrittmotor aus vielen Permanentmagneten, die kreisförmig angeordnet sind. Diese werden durch das Magnetfeld des Stators zu einer Drehbewegung angeregt. Der Stator selbst ist aus mehreren Spulen aufgebaut, die durch Stromfluss ein Magnetfeld im Motorinneren hervorrufen. Durch die entgegengesetzte Wicklungs- Abbildung 3.25: richtung der hintereinander geschalteten Spulen liegen un- Schrittmotor außen terschiedliche, steuerbare „Magnete“ nebeneinander. Sie sind mit ihrem potentiellen Polende zum Motormittelpunkt ausgerichtet. Gegenüberlegende gleichnamige Pole von Motor und Stator stoßen sich jetzt gegenseitig ab, wobei sich ungleichnamige entsprechend anziehen. Da sich nach einer Bewegung ein Ruhezustand mit sich gegenüberliegenden ungleichnamigen Polen einstellt, muss dafür gesorgt werden, dass aus den Abbildung 1.26: einstweiligen Südpolen Nordpole werden und umgekehrt, Schrittmotor innen um eine Abstoßung hervorzurufen. Abbildung 1.28: Zerlegung Schrittmotor Abbildung 1.27: Innerer Aufbau eines Schrittmotors Durch eine Anordnung weiterer solcher Systeme mit einem um die Drehachse leicht versetzten Rotorring ist gewährleistet, dass der Rotor den toten Punkt überwinden kann. Somit hat der Motor zwei oder drei Anschlüsse pro Schicht, was durch die Vielfalt der Schrittmotor-Modelle auf eine Anzahl von vier, sechs, acht oder mehr Anschlüsse hinausläuft, wodurch er sich von anderen Motoren unterscheidet. Elektronische Schaltung zur Ansteuerung des Schrittmotors Durch eine geeignete Elektronik soll es jetzt möglich sein eine Schaltung zu entwickeln, in der die Stromrichtung in den Spulen beider Schichten beliebig schnell und im gewünschten Verhältnis geändert werden kann, um die Geschwindigkeit und die Bewegungsrichtung einstellen zu können. Dies kann durch die im Folgenden beschriebene Schaltung bewerkstelligt werden. Abbildung 1.29: Schaltplan für Schrittmotor In der Schaltung sind zwei Anschlüsse an ein Data Acquisition Module (DAQ) vorgesehen. Der DAQ stellt die Verbindung zwischen PC und Schaltung dar. Durch ein geeignetes Programm, z. B. in der Programmiersprache LabVIEW, können sowohl digitale als auch analoge Ausgänge des DAQs Abbildung 1.30: (E1, E2) gezielt angesteuert und somit eine Ausgangsspan- DAQ von National In- nung erzeugt werden. Diese dient im Schaltkreis zum An- struments steuern der Leistungstransistoren (BD 139, BD 140). Dazwischen geschaltete Operationsverstärker, die über die nichtinvertierenden Eingänge am DAQ angeschlossen sind, dienen dazu, den Transistoren genügend Strom zur Verfügung zu stellen (Grundlagen siehe Abschnitt „Transistor“). Dieser hohe Steuerstrom durch die Basis wird benötigt, damit die Stromstärke im Motor ausreichend groß ist. Liegt an einem der Ausgänge des DAQs (E1 oder E2) eine Spannung an (Highpegel am DAQ) führt dies zum Sperren des pnp-Transistors (jeweils Modell BD140) da die Basis-Emitterspannung Null wird. Der npn-Transistor (Modell BD139) hingegen ist durchgeschaltet, so dass dieser Anschluss der Spule mit Masse verbunden ist. Abbildung 1.31: möglicher Stromfluss Durch das Anlegen einer Spannung von 5 V am anderen Output des DAQs und das Entfernen der Spannung am ersten Ausgang, werden jeweils die entgegengesetzten Transistoren durchgeschaltet. Beim Wechseln der Signale ist die Stromrichtung gerade umgekehrt, alle Spulen im Stator ändern die Orientierung ihres Magnetfelds und gleichnamig geladene Pole stehen sich wieder gegenüber. Bei ständiger Umpolung kann sich der Rotor durch die Änderung der Stromrichtung drehen. Mehrere Schichten fordern natürlich die mehrfache Anfertigung dieser Schaltung. Ansteuerung durch Signale des Benutzers Die Geschwindigkeit der wechselnden Signale bestimmt die Geschwindigkeit des Motors, also die Umdrehungen pro Zeiteinheit. Ein Ablauf dieser Struktur in umgekehrter Richtung führt entsprechend zu einer Umkehrung der Drehbewegung, da der Motor den vorangegangenen Zustand annimmt. Quellen http://www.omniray.ch/images/database/mailing/all/schrittmotor_ka60_web.gif 11.07.2008 http://upload.wikimedia.org/wikipedia/de/thumb/9/93/Schrittmotorfoto.jpg/300pxSchrittmotorfoto.jpg 11.07.2008 http://www.htw-aalen.de/extern/dti/doku_stp/hybr_mot.gif 11.07.2008 http://www.roboternetz.de/wissen/index.php/Transistor 11.07.2008 http://www.elektronik-kompendium.de/sites/bau/0201291.htm 11.07.2008 http://sine.ni.com/images/products/us/040716_usb6008_l.jpg 12.07.2008 Grundlagen der Mechanik Philipp Bechtel, Julian Puhl Beschäftigt man sich mit dem Bau eines Roboters, so sind natürlich auch mechanische Überlegungen zur Konstruktion wichtig. Kraft Grundlegend in der Mechanik ist der Begriff der Kraft. Eine Kraft besteht immer aus einem Kraftbetrag und der dazugehörigen Wirkungslinie. Diese gibt die Richtung an, in die die Kraft wirkt. Der Angriffspunkt der Kraft ist auf ihrer Wirkungslinie frei verschiebbar. Dieses Verschieben wird als Translation bezeichnet. Einheit der Kraft ist 1 Newton = 1 N = 1 m · kg · s-2. Wirkt auf einen Körper mehr als eine Kraft, ist F1 Fres die Summe dieser Kräfte die resultierende Kraft. Abbildung 1.32 zeigt die resultierende Kraft Fres aus den Kräften F1 und F2. Sie wird mit einem Kräfteparallelogramm konstruiert. Körper F2 Abbildung 1.32: Kräfteparallelogramm Eine Kraft, die auf einen Körper wirkt, kann auch so angenommen werden, als ob sie nur auf einen Punkt am Körper wirkt (s. Abb. 1.32). Dieser Punkt eines Körpers heißt Schwerpunkt. Newtonsche Axiome Die drei Newtonschen Axiome sind Grundgesetze der klassischen Mechanik. Erstes Newtonsche Axiom (Trägheitsprinzip): Körper, die sich in Ruhe befinden oder sich mit konstanter Geschwindigkeit fortbewegen bleiben in diesem Zustand, wenn keine Kräfte auf sie wirken. Zweites Newtonsches Axiom (Beschleunigungsprinzip): Wirkt eine Kraft F auf einen Körper, so erfährt dieser eine Beschleunigung a, die proportional zur Masse m des Körpers ist. Dieser Zusammenhang wird durch die Formel F = m · a beschrieben. Drittes Newtonsches Axiom (Prinzip von actio und reactio): Übt ein Körper A eine Kraft auf einen Körper B aus (actio), so übt der Körper B eine betragsgleiche Kraft in entgegengesetzter Richtung auf den Körper A aus (reactio). Drehmoment Wirkt eine Kraft F auf einen an einer Achse fixierten Körper im Abstand r zur Achse, verursacht diese Kraft eine Drehbewegung. Diese Drehwirkung wird als Moment M bezeichnet und ist definiert als das Produkt aus der Kraft F und dem Drehradius r, sofern die Kraft senkrecht zum Drehradius wirkt. Es gilt also: M = F · r. Wirkt die Kraft nicht senkrecht zum Drehradius, sondern im Winkel φ dazu, so ist nur der zum Drehradius senk- φ F rechte Anteil der Kraft beim Moment zu berücksichtigen und es gilt: M = F⊥ · r = F · sin φ · r (s. Abb. 1.33). F · sin φ φ r Abbildung 1.33: M = F · sin φ · r Freiheitsgrade Die möglichen Translationen und Rotationen eines Körpers bezeichnet man als Freiheitsgrade. Im zweidimensionalen Raum hat ein freier Körper 3 Freiheitsgrade: Zwei Translationen und eine Rotation sind möglich (s. Abb. 1.34). Im dreidimensionalen Raum gibt es drei mögliche Translationen und drei mögliche Rotationen, also 6 Freiheitsgrade (s. Abb. 1.35). y z 2.: Translation 3.: Rotation 6.: Rotation 1.: Translation 3.: Translation 2.: Translation x y 5.: Rotation 1.: Translation x 4.: Rotation Abbildung 1.34: Freiheitsgrade im zweidimensionalen System Abbildung 1.35: Freiheitsgrade im dreidimensionalen System Durch Lager können Freiheitsgrade eingeschränkt werden. Ein Loslager (s. Abb. 1.36) schränkt zum Beispiel einen Freiheitsgrad ein, nämlich die Verschiebung in yRichtung, während eine Verschiebung in x-Richtung und Abbildung 1.36: Loslager eine Rotation immer noch möglich sind. Ein Loslager ist also ein einwertiges Lager. Beim zweiwertigen Festlager wird neben der Bewegung in y-Richtung auch die Bewegung in x-Richtung fixiert (s. Abbildung 1.37: Festlager Abb. 1.37). Die dreiwertige Einspannung (s. Abb. 1.38) fixiert alle drei Freiheitsgrade. Abbildung 1.38: Einspannung Ruhelage Ein ruhender Körper bleibt in Ruhelage, wenn für ihn gilt: 1. Die Summe aller Kräfte ist gleich null. 2. Die Summe aller Drehmomente ist gleich null. Ist eine der obigen Summe nicht gleich null, so wird der Körper beschleunigt. Quellen Prof. Dr.-Ing. Diebels, Stefan: Vorlesungsskript zur Technischen Mechanik I. Saarbrücken, 2003 http://www.bio-chart.com/mm/newton.html 11.07.2008 Entwicklung Roboterkopf Lena Marie Funke Unabdingbar schien uns zunächst das Anschauen der „Star-Wars“-Filme, besonders der Ausschnitte, in denen R2D2 eine große Rolle einnimmt. So konnten wir uns einen Überblick über die Originalfunktionen insbesondere am Kopf verschaffen. Daraufhin gestalteten wir eine Skizze und einen Arbeitsplan. Schon jetzt war klar, dass die Arbeit angesichts des hohen Pensums an festgelegten Wunschfunktionen wohl hauptsächlich in zwei kleinen Gruppen mit je zwei Personen ablaufen würde. In unterschiedlichen Konstellationen wagten wir vier uns dann je nach Interesse an die Umsetzung heran. Ohne Frage waren sowohl blinkende LEDs, Lautsprecher zur Ausgabe der charakteristischen Piepstöne, die Integration der Kamera und die Drehung des Kopfes erste Priorität. Weiter sollten in direktem Bezug zum Film eine Wasserspritze und eine ausfahrbare Teleskopstange integriert werden. Hauptbestandteil des Kopfes ist die Hälfte eines Globus mit 50 cm Durchmesser, bereits farblich gestaltet und dem Original verblüffend ähnlich. Diese Halbkugel ruht auf einer Holzscheibe desselben Durchmessers, welche drehbar auf dem Rumpf des Roboters gelagert ist. Durch eine Öffnung in der Mitte der Scheibe können später die Kabel zur Steuerung und Stromversorgung geführt werden. Nach dem Einbau der kopfinternen Abbildung 4.39: R2-D2 Übersicht Funktionen Schaltungen wird die Schale mit Holzklötzen auf der Platte verschraubt. Auf eine überschaubare Verkabelung und Befestigung der Kabelstränge ist zu achten, um die freie Drehbarkeit des Kopfes ohne Komplikationen durch sich verheddernde Kabel zu gewährleisten. Die Kopfplatte wird auf einer weiteren Scheibe gelagert, in die Plastikrollen eingesetzt sind. Begrenzungen auf der Innenseite sorgen dafür, dass die obere Platte über der unteren kongruent verläuft – auf die eigentliche Realisierung der Drehbewegung wird im Kapitel „Drehung des Kopfes“ näher eingegangen. Klappe für Wasserspritze Teleskopstange LED Binäruhr Kamera Taschenlampe helle LEDs LED rot-blau Abbildung 1.40: Frontansicht Kopf LED gelb-grün LED-Panel Blau-grün Plattenzwischenraum untere Platte Abbildung 1.41: Rückansicht Kopf Quellen http://starwars.wikia.com/wiki/Image:R2parts_CVD.jpg 12.07.2008 Drehung der Kopfplatte Lena Marie Funke Am Beispiel der zu realisierenden Drehbewegung des Kopfes lässt sich die Vielfältigkeit der Mechatronik gut nachvollziehen. Ziel der Überlegungen ist es, die Bewegung eines Schrittmotors, den man sehr gut per LabVIEW-Programm ansteuern kann, in die Drehung des Kopfes umzusetzen. Die Umpolung der Felder im zur Verfügung stehenden 2-Phasen-Schrittmotor muss vom Benutzer über Befehle am PC möglich sein, da sie unmittelbar mit der Drehrichtung des Kopfes und der Geschwindigkeit dieser Bewegung in Verbindung steht. Zur Ansteuerung nutzen wir die Schaltung, die im Kapitel „Der Schrittmotor“ beschrieben wurde. Praktische Voraussetzungen/ Vorversuche Die Versorgung der Spulen soll über einen 12 V - Akku bewerkstelligt werden. Spannungen von 5 V, die als Versorgungsspannung der Operationsverstärker nötig sind, werden durch einen Spannungswandler zur Verfügung gestellt. Ein vorangegangener Versuch, die Schaltung ohne Operationsverstärker, aber mit zwei zusätzlichen Transistoren zu betreiben zeigte, dass die Stromstärke an den Spulen viel geringer als der Wert von 0,75 A war, die nötig sind um den Motor mit voller Leistung betreiben zu können. Mechanische Umsetzung Die Rotation der Motorwelle wird über einen Antriebsriemen auf ein Plastikrad übertragen, das in die untere Holzscheibe der Kopfkonstruktion eingelassen ist. Das bei eingeschaltetem Motor rotierende Rad treibt die obere Platte mit der Kopfschale an. Als Stütze dienen drei weitere Plastikräder unter der Drehscheibe. LEDs im Kopf: R2D2 kann leuchten und blinken Julian Puhl LED ist die Abkürzung für LEuchtDiode (eigentlich engl.: Light Emitting Diode). Eine Leuchtdiode ist eine Sonderform der Diode, die leuchtet, wenn ein Strom durch sie fließt. Alle Lichter am Kopf des Roboters sind mit LEDs konstruiert. Insgesamt gibt es sechs Lichtsysteme: Vorne am Kopf gibt es eine weiße, gerichtete „Taschenlampe“ mit sehr hellen, weißen LEDs, eine weitere LED-Konstruktion, die sich von blau nach rot und umgekehrt dimmen lässt und ein Binärzähler mit grünen und blauen LEDs. An der Hinterseite des Kopfes befinden sich eine Lampe mit grünen und gelben LEDs, eine blau-grüne LED-Leiste und weiter oben am Kopf eine blaue Lampe. Für die weiße „Taschenlampe“ und die blau-rote Lampe wurde eine Dimmschaltung verwendet, mit der man die LEDs mit einer Steuerspannung zwischen 0 und 5 Volt dimmen kann. Eine solche Schaltung ist nötig, da sich die Helligkeit von LEDs nicht einfach über die zugeführte Spannung regulieren lässt: Die LED leuchtet überhaupt nur in einem relativ begrenzten Spannungsintervall. Abbildung 1.42 zeigt die verwendete Schaltung. Am Eingang links wird eine Spannung angelegt – bei 0 Volt sind die blauen LEDs (rechts oben) aus, bei 5 Volt leuchten sie in voller Helligkeit. Die angelegte Spannung wird durch den Operationsverstärker LMC6482 verstärkt und liegt dann als Steuerspannung am Control-Eingang CRTL des IC NE555 an. Dieser IC bewirkt nun, dass der Kondensator, der links an die Anschlüsse Trigger und Treshold angeschlossen ist, sich auflädt bis die Steuerspannung erreicht ist und sich anschließend wieder entlädt bis die durch einen Spannungsteiler abgegriffene halbe Steuerspannung erreicht ist. Durch dieses periodische Laden und Entladen des Kondensators entsteht am OUTAnschluss des IC rechteckförmige Spannung. Dabei fließt in einem bestimmten Zeitintervall tein ein Strom und während der restlichen Periode nicht. Folglich wird der Transistor, an dessen Kollektor die LEDs angeschlossen sind, nur während tein geschaltet. Die LEDs werden somit nur einen Teil der Zeit mit Strom versorgt. Dieses rhythmische Aufleuchten wird jedoch vom menschlichen Auge nicht als Flackern Abbildung 1.42: Dimmschaltung empfunden wenn die Periodendauer hinreichend kurz ist. Als Gesamteindruck wird so ein gedimmtes Leuchten wahrgenommen. Also kann man mit der Eingangsspannung die Helligkeit der LEDs steuern. Dieser Anschluss wird über einen analogen Ausgang des DAQ gesteuert. Eine zweite verwendete Art der Lampensteuerung sind solche LEDs, die nicht gedimmt werden sollen, sondern entweder an- oder ausgeschaltet sind. Zur Steuerung solcher LED-Systeme mit dem DAQ muss den LEDs eine kleine Schaltung vorgeschaltet werden (Abb. 1.43). Eine besondere Anwendung so angesteuerter LEDs ist ein Binärzähler. Er wurde mit den LED-Felder an der vorderen Kopfseite verwirklicht. In diesem LEDKomplex gibt es sechs Mal jeweils fünf LEDs, die zusammen angesteuert werden. Versteht man eine angeschaltete LED-Fünfergruppe als 1 und eine ausgeschaltete als 0, so kann man binär 26 = 64 Zahlen darstellen. Davon können 60 Zahlen genutzt werden um einen Sekundenzähler zu generieren. Mit einem Programmteil des LabVIEW- Programms, das den gesamten Roboter steuert, wird nun mit diesen sechs LED-Fünfergruppen die Sekundenzahl angezeigt. Abbildung 1.43: Steuerungsschaltung für LEDs mit an/ausFunktion Motion-Tracking-Kamera mit integriertem Mikrofon Tim Ruffing Um den Roboter aus der Ferne, z. B. aus einem anderen Raum, steuern zu können, ist es notwendig, dass er seine Umgebung optisch und akustisch wahrnehmen kann. Dazu besitzt unser R2D2 eine Roboterkamera mit integriertem Mikrofon, die „Motion Tracking Robocam“ von „7Links“. Sie wird an einen USB-Anschluss und an die Soundkarte des Computers im Roboter angeschlossen. Mikrofon Abbildung 1.44: Kamera im Roboter verbaut Es ist möglich, die Kamera mit Hilfe von insgesamt zwei eingebauten Motoren um die vertikale Achse um 180° und um die horizontale Achse um 60° zu drehen. Die Steuerung der Motoren kann manuell oder automatisch erfolgen; bei automatischer Steuerung versucht die Treibersoftware bewegte Objekte selbstständig zu verfolgen (Motion Tracking). Da die Drehung um die Hochachse bereits durch die Drehung des Roboterkopfes realisiert wird, ist es nicht nötig, den entsprechenden Motor der Kamera zu benutzen. Stattdessen bietet es sich an, ihn mechanisch mit einem Potentiometer, einem veränderlichen ohmschen Widerstand, so zu verbinden, dass sich der Widerstandswert mit dem Drehwinkel des Motors verändert. Mit Hilfe eines DAQ lässt sich die Spannung messen, die über dem Potentiometer abfällt. Diese ist proportional zum Winkel, um den die die automatische Steuerung die Kamera drehen würde. Wird dieser Win- kel für die Drehung des Kopfes verwendet, ist es möglich, dass R2D2 mit seinem Kopf Bewegungen in der Umgebung verfolgt. Potentiometer Motor Abbildung 1.45: Potentiometer mit Motor der Kamera Das Kamerabild und das Audiosignal, das durch das Mikrofon aufgenommen wird, wird über Wireless-LAN an einen Laptop übertragen, mit dem sich der Roboter steuern lässt. Die Farbtemperatur des Bildes wird dabei durch die Kamera selbstständig den Lichtverhältnissen angepasst. Abbildung 1.46: Anzeige des Kamerabildes und Bedienoberfläche (links) am Steuerungslaptop Die Teleskopstange Johannes Thewes Eine weitere typische Funktion unseres R2-D2 ist die ausfahrbare Teleskopstange an der man noch eine zusätzliche Kamera installieren könnte. Das Herzstück ist ein Teleskoprohr, welches aus zwei ineinander verschiebbaren Aluminiumröhren besteht. Die Röhre mit dem geringeren Durchmesser wird mithilfe eines Holzklotzes an der Bodenplatte des Kopfes befestigt. Kurz vor der Öffnung für die Klappe werden die Stangen durch einen Holzwinkel geführt. Auf derselben Höhe befindet sich auch eine Schraube, die als Umlenkrolle für die am Boden der dickeren Röhre befestigten Angelschnur fungiert. Am oberen Ende der äußeren Stange ist die Abdeckung für die Öffnung so angebracht, dass sie im eingefahrenen Zustand exakt in den Kopf eingepasst ist. Das Ganze wird durch einen Servomotor angetrieben, dessen Drehwinkel 180° durch eine 7 cm lange Holzleiste so übersetzt wurde, dass er die Stange um 15 cm ausfahren kann. Er wird durch unseren am Computer angeschlossenen ServoControl durch die Software gesteuert. Deckklappe Äußeres Teleskoprohr Servomotor Inneres Teleskoprohr Verlängerung des Servomotors Abbildung 1.47: Ausfahrbare Teleskopstange Die Wasserspritze Julian Puhl Wer die Star-Wars-Filme geschaut hat, weiß, dass R2D2 Feuer löschen kann. Entsprechend sollte in den Kopf auch eine Wasserspritze eingebaut werden. Zur Konstruktion der Spritze wurde die Pumpe der Scheibenwaschanlage eines Golf IV verwendet. Eine solche Pumpe hat drei Anschlüsse: Einen um das Wasser anzusaugen, einen zum Spritzen und einen Überlauf-Anschluss zum Druckausgleich. Der Anschluss, der das Wasser ansaugt, wurde an eine Plastiktrinkflasche angeschlossen, die einen halben Liter fasst und oberhalb der Pumpe angebracht sein muss. Der Überlauf-Anschluss wurde zurück in den oberen Teil der Plastikflasche geführt. Der Schlauch des dritten Anschlusses ist folglich der, aus dem das Wasser spritzen soll. Die Spritze wird mit 12 Volt betrieben und über ein Relais geschaltet (Abb. 1.48), da die Pumpe mehr Strom benötigt als unsere Transistoren vertragen. Problematisch war bei der Wasserspritze vor allem die Abdichtung der Konstruktion. Abbildung 1.48: Steuerungsschaltung für die Wasserspritze Die Anschlüsse der Pumpe konnten mit einer Heißklebepistole recht gut an der Flasche befestigt werden. Insgesamt schien die Anlage jedoch zu unsicher, um in den Roboterkopf eingebaut zu werden, auch wenn sie funktionstüchtig und eigentlich dicht war, doch wäre bei einem kleinen Fehler die gesamte Elektronik des Kopfes unbrauchbar gewesen, so dass das Risiko zu groß war. Bei einer sicheren Dichtung wäre es jedoch durchaus noch möglich, die Spritze in den Kopf einzubauen. R2D2 wäre dann in der Lage, einige Meter weit einen dünnen Wasserstrahl zu spritzen. Zum geplanten Platz im Kopf, an dem die Spritze eingebaut werden soll, sei noch gesagt, dass es eine Klappe gibt, hinter der die Spritze zum Vorschein kommen würde. Diese Klappe wird mit einem Servo und einer Drahtkonstruktion geöffnet und geschlossen und über den DAQ gesteuert. Software für den Kopf des R2D2 Tim Ruffing Für die Steuerung des Roboters wird ein Laptop verwendet, der über Wireless-LAN mit dem Computer im R2D2 verbunden ist. Über eine Remote-Desktop-Verbindung ist es möglich, die Software des Roboters zu bedienen. Zur Programmierung wurde LabVIEW verwendet, ein grafisches Programmiersystem, mit dem sich kleine Softwareprojekte schnell realisieren lassen. Im Hinblick auf den Kopf des R2D2 ist es Aufgabe der Software, seine Drehung zu steuern, die LEDs an- und abzuschalten bzw. zu dimmen. Darüber hinaus sollen der Teleskopstab und die Klappe mit der Spritze zu bedienen sein. Sounds dimmbare LEDs LEDs Abbildung 1.49: Bedienelemente für den Kopf des R2D2 Intern durchläuft die Software ständig eine Schleife, die durch die „STOP“Schaltfläche abgebrochen werden kann. Bei jedem Durchlauf werden die Werte, die der Benutzer an der Bedienoberfläche eingestellt hat, eingelesen und verarbeitet. Steuerung der LEDs Die grünen und die gelben LEDs im hinteren Teil des Kopfes werden separat über Schaltflächen bedient, genauso auch die blaue Leuchte am Kopf und die Seitenleiste, die aus grünen und blauen LEDs besteht. Alle diese Leuchtdioden haben gemeinsam, dass sie digital angesteuert werden, es ist also lediglich möglich, sie an- und auszuschalten. Bei jedem Schleifendurchlauf wird der Zustand der Schaltfläche, also „an“ oder „aus“, durch die Software an den DAQ übertragen, der dann dementsprechend eine hohe oder eine niedrige Spannung an der Steuerleitung der zugehörigen LEDSchaltung erzeugt. In den rechteckigen Feldern am vorderen Teil des Kopfes befinden sich weitere sechs Gruppen von LEDs, die den Sekundenwert der aktuellen Uhrzeit binär darstellen, also nicht vom Benutzer selbst gesteuert werden. Die Software wandelt dazu den Sekundenwert in eine Binärzahl um. Jedes Bit repräsentiert dabei den Zustand einer Gruppe aus Leuchtdioden. 12:20:37 1 0 0 1 0 1 LEDGruppen ausgeschaltet angeschaltet Abbildung 1.50: Binäruhr (schematisch) Eine blaue und eine rote LED-Gruppe im vorderen Bereich des Kopfes sowie die Lampe, deren Bedienung wir aus zeitlichen Gründen jedoch nicht mehr in die Software implementieren konnten, lassen sich durch eine Dimmschaltung regulieren. Auf der Benutzeroberfläche befinden sich zwei Regler, mit denen die Helligkeit der roten bzw. blauen LEDs reguliert werden kann. Ein größerer Wert erzeugt im DAQ eine größere Spannung, die wiederum einer größeren Helligkeit entspricht. Sound-Ausgabe R2D2 fällt im Original durch eine Vielzahl verschiedener Pieplaute auf. Deshalb ist es notwendig, dass unser Roboter über Lautsprecher ebenfalls Töne ausgibt. May the force be with you. Hash 34720698735174 Modulo 100 Anzahl R2D2Sounds 74 Sounddatei 74 Abbildung 1.51: Auswahl einer Sounddatei (beispielhaft) Unsere Software bietet zwei Möglichkeiten zur Steuerung. Zum einen kann der Benutzer eine der beiden vorbereiteten Schaltflächen „Hallo“ oder „STAR WARS“ anklicken, wodurch eine kurze Sounddatei bzw. das Hauptthema der Filmmusik ausgegeben wird. Die andere Möglichkeit zur Steuerung besteht darin, Text auf der Benutzeroberfläche einzugeben, den die Software automatisch in Sounds „übersetzt“. Jedes einzelne Wort wird dabei nacheinander einer Hash-Funktion übergeben, die aus dem Text eine Zahl errechnet. Anhand dieser Zahl kann nun durch eine Modulo-Teilung aus einer Datenbank von Originalsounds aus den Filmen eine Datei ausgewählt und abgespielt werden. Dabei wird der Hash-Wert durch die Anzahl der zu Verfügung stehenden Dateien geteilt. Der Rest, der dabei übrig bleibt, gibt die fortlaufende Nummer der Datei an. Verschiedene Wörter entsprechen so verschiedenen Sounds, Großund Kleinschreibung spielt dabei keine Rolle. Insgesamt lassen sich so beliebige Sätze aus R2D2-Sounds zusammenstellen. Steuerung der Klappe und des Teleskopstabes Die beiden Platten am Kopf, die durch Servomotoren geöffnet werden können, lassen sich ähnlich wie die LEDs über einfache Schaltflächen bedienen. Im Programm werden jeweils zwei Drehwinkel gespeichert, zwischen denen gewechselt werden kann. Die Steuerung der Motoren erfolgt über einen „ServoControl“-Chip, der mit dem USBAnschluss des Computers im R2D2 verbunden werden kann. Steuerung der Drehung des Kopfes Die Schaltung des Schrittmotors im Kopf besitzt vier digitale Steuerleitungen, die an einem DAQ angeschlossen sind. Um den Motor zu drehen, muss eine periodische Folge von Signalen erzeugt werden. Dabei gibt es vier Zustände; je eine Zustandsänderung entspricht einem Schritt. Zwischen jedem Schritt muss eine gewisse Zeit, bei unserem Motor mindestens 8 ms, gewartet werden, da sich die mechanischen Teile träge verhalten. Wird die Reihenfolge umgekehrt, lässt sich der Motor in die entgegengesetzte Richtung drehen. Im Programmfluss wird dies durch eine verzögerte Schleife ermöglicht, bei der über eine Schaltfläche eingestellt werden kann, ob der Schleifenzähler inkrementiert oder dekrementiert wird. Abbildung 5.52: Bedienelemente für die Steuerung des Schrittmotors Letztendlich hat die Zeit nicht gereicht, Bedienelemente für die Drehung in die Hauptsoftware zu integrieren, obwohl der Motor korrekt angesteuert werden kann. Spracherkennung Durch das integrierte Mikrofon der Kamera lässt sich alternativ zur Bedienoberfläche eine Sprachsteuerung realisieren, die mit einer Schaltfläche angeschaltet werden kann. Das Programm nutzt dabei das Spracherkennungsmodul der „Microsoft Agent“Software1. Es lassen sich beliebige Kommandos definieren, die dann beispielsweise 1 http://www.microsoft.com/msagent (engl.) Mausklicks ersetzen können. In der Praxis erweist sich die Erkennung allerdings als schwierig, da das Mikrofon stark rauscht und in der Regel auch relativ weit vom Sprecher entfernt ist. Ein weiteres Problem war das fehlende Training der Software auf unsere Stimmen. Dennoch ist es in einer ruhigen Umgebung möglich, dass R2D2 auf Kommandos wie „Hey R2“ oder „Play music“ korrekt reagiert. Ausblick Ein weiteres Feature, das die Software besitzen könnte, wäre eine Datenbank verschiedener Emotionen, die auf Knopfdruck ausgeführt werden können. Eine Emotion in diesem Sinne ist das Zusammenspiel von mehreren Funktionen wie z. B. Drehen des Kopfes, Leuchten von LEDs und Abspielen von Sound, so dass „Sprache“ und Gestik vereint werden: Der Roboter könnte durch einen einzelnen Klick den Kopf zur Seite drehen, einen dunklen Sound abspielen und die LEDs ausschalten, um Trauer auszudrücken. Der Roboterarm Tobias Tebbi, Frederik Wienke, Sabrina Hoppe, Tobias Theobald Von Anfang an stand fest, dass der Roboter im Endstadium in der Lage sein sollte aktiv auf seine Umwelt einwirken zu können. Nur ein Roboterarm konnte diese Anforderung erfüllen. Aufgrund der hohen Komplexität der Materie wurde eine komplette Projektgruppe mit der Konstruktion eines solchen Armes betraut. Das Vorbild, der R2D2 aus der Filmvorlage verfügte über eine Vielzahl von Roboterarmen In unserem Fall musste jedoch von der Filmvorlage abgewichen werden, da die Arme des eigentlichen R2D2 zu filmspezifische Funktionen hatten. Die Projektgruppe war an keinerlei Vorgaben gebunden, was einerseits eine Vielzahl an Möglichkeit offen ließ, andererseits aber auch den Einstieg in die für alle Beteiligten völlig fremde Materie erschwerte. Die Verwirklichung des Projektes lässt sich grob in drei Teile unterteilen, zu Beginn stand die Planung, verbunden mit einer Ideensammlung und der Ausarbeitung eines groben Konzeptes, gefolgt von der Konstruktionsphase. Die dritte Phase des Projektes war der Programmierung des fertig konstruierten Armes gewidmet. Anwendungen in allen drei Teilbereichen der Mechatronik waren bei der Konstruktion des Armes nötig, der Schwerpunkt lag jedoch aufgrund der Natur des Armes bei der Mechanik. Abbildung 1.53 Vorgefertigter Roboterarm Zu Beginn der Planungsphase einigte sich die Gruppe über die Grundidee des Armes. Dabei half ein schon vorher aus einem Bausatz hergestellter Roboterarm. Zu- nächst stand zur Debatte, ob dieser in den Roboter eingebaut werden sollte, die damit eingesparte Arbeitszeit hätte man in eine ausführlichere Programmierungs- und Testphase investieren können. Die Gruppe entschloss sich jedoch gegen den vorgefertigten Arm, da die angegebene Nutzlast von 130 g nicht ausreichte und es nicht möglich war seine Bewegungen ohne Sichtkontakt nachzuvollziehen. Dies war jedoch eine wichtige Anforderung an den Arm, da er letztendlich mit Hilfe eines kabellosen Netzwerkes angesteuert werden sollte. Der vorgefertigte Arm half jedoch bei der Aufstellung eines Grundkonzeptes, welches sich zudem am Gelenksystem des menschlichen Armes orientierte. Um eine ausreichende Beweglichkeit und damit Funktionstüchtigkeit zu erreichen, musste er in allen Richtungen dreh und kippbar sein, was nur durch eine relativ große Anzahl an Gelenken ermöglicht werden konnte. Schließlich wurde eine weitere Anforderung an den Arm gestellt, er sollte komplett im Gehäuse versenkbar sein. Es stellte sich nun das Problem einen geeigneten Gelenkantrieb zu finden, der all diesen Anforderungen genügte. Die Gruppe entschied sich für Servomotoren, da diese über eine eingebaute Messeinrichtung verfügen, die es möglich macht, dem Motor eine Position anzugeben, die dieser dann anfährt. Ein Nachteil der Servomotoren war die Tatsache, dass sie nur über einen Bewegungsspielraum von 180° verfügen; dieses Problem stellte sich jedoch als wenig gravierend heraus, da kein Gelenk über einen Bewegungsspielraum verfügten sollte, der diese Grenze überschritt. Als Hauptwerkstoff wurde Holz aufgrund seiner guten Verarbeitbarkeit festgelegt. Mit diesen Informationen war es nun möglich eine Liste mit allen geplanten Bauteilen aufzustellen, die helfen sollte das Endgewicht des Armes zu berechnen, um dieses mit dem Stellmoment abzugleichen. Dabei stellte sich heraus, dass es bei einer vorgesehenen Armlänge von 50cm praktisch unmöglich war den Arm mit den vorgesehenen Servomotoren zu konstruieren, da diese nur über ein Stellmoment von 31,4 Ncm bei 4,8 V verfügten. Dieses Stellmoment unterschritt die Anforderungen so stark, dass auch bei starker Gewichtsreduzierung, wie z.B. Skelettierung der Holzbauteile, eine Konstruktion unmöglich blieb. Es war daher unumgänglich neue Servomotoren mit einem höheren Stellmoment zu besorgen. Die Projektgruppe entschied sich für drei Servomotoren mit einem Stellmoment von 103 Ncm bei einer Versorgungsspannung von 4,8 V. Nun wurde ein ausführlicher Bauplan ausgearbeitet, der alle Bauteile in Originalgröße zeigte. Der Arm sollte über fünf Gelenke verfügen: Ein „Schultergelenk“, bestehend aus einem Drehgelenk am Armansatz und einem anschließenden Kippgelenk, gefolgt Abbildung 1.54 Endgültiger Bauplan von einem weiteren Kippgelenk in der Mitte des Armes, dem „Ellenbogengelenk“, sowie zwei Gelenken die dazu dienen sollten, die Kralle zu steuern; eines zum Drehen des „Handgelenkes“, das letzte schließlich zum Zusammenziehen der Greifer. Um die Krallengreifer zurück in die Ausgangsposition zu bewegen, sollte eine Zugfeder auf die Kralle montiert werden. Die nun abgeschlossene Planungsphase sah die Konstruktion eines 600 g schweren, 50 cm langen Armes vor, bestehend aus fünf Gelenken, die durch sechs Servomotoren angetrieben werden sollten. Der Roboterarm Sabrina Hoppe Die Konstruktion Nach der ersten Planungsphase ging es nun an die konkrete Umsetzung, also an die Konstruktion und Fertigung. Dabei diente der menschliche Arm als Orientierung. Man kann Folgendes festhalten: 1 1 1 3 Abbildung 1.55: die Freiheitsgrade des menschlichen Arms Die Schulter ist ein Kugelgelenk mit 3 Freiheitsgraden - oben/unten, rechts/links und einer Drehung. Um die Konstruktion zu ermöglichen, muss das vereinfacht werden: Wenn man ein Gelenk für die Drehung einbaut, kann man mit selbigem auch die Freiheitsgrade oben/unten und rechts/links verwirklichen. Daher besteht die Schulter des Roboterarms aus zwei dicht hintereinander gebauten Gelenken. Das erste ist ein Drehgelenk, darauf folgt ein Kippgelenk. Einfacher gestaltete sich die Umsetzung des Ellenbogens (ein Kippgelenk mit einem Freiheitsgrad) und die des Handgelenks, das man als einfaches Drehgelenk annehmen kann. Die menschliche Hand ist natürlich schwer genau nachzubauen und außerdem nicht notwendig für einen Roboter, der nicht feinmechanisch arbeiten, sondern nur einfache Gegenstände aufheben soll. Daher reichte für den R2D2 eine einfache Zange mit zwei Greifern vollkommen aus. Abbildung 1. 56 zeigt die Baupläne des Roboterarms: Abbildung 1.56 : Baupläne des Roboterarms Die Gelenke werden im Folgenden detailliert erklärt: Die Schulter Hier wird ein quadratischer Holzblock fest im Roboter verankert. In der Mitte dieses Blocks befindet sich eine Achse, mit deren Hilfe vorne und hinten zwei kleine, frei drehbare Holzstücke befestigt sind. Diese können mit einem Servomotor problemlos gedreht werden. Um den Arm zu modellieren, wurden an einen der beiden kleinen Holzklötze Seitenteile angeschraubt. Abbildung 1.57: Das Drehgelenk der Schulter In diese Seitenteile ist jeweils ein Servomotor eingelassen, so dass in der Mitte ein weiteres Armteil angebracht und von den Motoren um 180° gekippt werden kann (Abb.1.57). Dies ist das Kippgelenk, das in seiner Anfangsstellung den Freiheitsgrad hoch/runter abdecken kann. Wenn man allerdings das erste Gelenk um 90° dreht, so kann dieses Kippgelenk auch den Freiheitsgrad rechts/links abdecken. Abbildung 1.58 : Das gesamte Schultergelenk Insgesamt werden also durch diese Schulterkonstruktion alle 3 Freiheitsgrade der menschlichen Schulter abgedeckt. Der Ellenbogen Der Ellenbogen entpuppte sich als eines der einfachsten Gelenke. Es handelt sich um ein sehr einfaches Kippgelenk: Es wurde auf dem Oberarm ein Servomotor angebracht, der den Unterarm um 180° drehen kann (Abb. 1.59). Abbildung 1.59: Der Ellenbogen Das Handgelenk Das Handgelenk wurde auf die Funktion eines einfachen Drehgelenks reduziert und stellte an sich zunächst kein Problem dar. Es sollte ein Servo auf das vordere Ende des Unterarms geschraubt werden, der – ähnlich wie bei der Schulter – eine Platte dreht, auf der wiederum die Zange befestigt werden kann. Allerdings stellte sich heraus, dass diese Konstruktion zu schwer gewesen wäre. Deshalb musste der Motor weiter nach hinten versetzt werden. Dazu war eine leichte Holzachse notwendig, mit der ein weiterer Servomotor nahe am Ellenbogen das Handgelenk drehen kann. Abbildung 1.60: Der Unterarm mit Zange Die Zange Die Zange ist das komplexeste Teil der gesamten Konstruktion. Sie besteht aus einer T-förmigen Grundplatte und natürlich den beiden Krallen, die mit Schrauben befestigt werden, so dass sie drehbar sind. Die Drehung selbst wird wieder durch einen am Ellenbogen angebrachten Servomotor hervorgerufen, indem der Motor eine Schnur, die sich kurz vor den Krallen teilt, aufwickelt. Löst der Motor die Spannung auf, so sorgt eine Feder dafür, dass die Zange wieder geöffnet wird. Die Schnur wird an der Achse vorbei durch eigens gebohrte Löcher geführt, sodass die Drehung des Handgelenks keinerlei Auswirkung auf die Krallen hat. Abbildung 1.61: vom Ellenbogen zur Zange Programmierung des Roboterarmes Tobias Theobald Servomotoren Servomotoren sind elektrische Motoren, die im Gegensatz zu normalen Motoren zur absoluten Positionierung benutzt werden können. Dazu sind in einem Gehäuse ein Motor mit Getriebe, eine Winkelmessvorrichtung und eine elektronische Regelung integriert. Die Regelung steuert den Motor so an, dass er sich auf einen vorgegebenen Winkel einstellt. Der Sollwert wird durch ein pulsweitenmoduliertes Signal vorgegeben. Dabei kann der Winkel um ±90° um eine Mittelstellung variiert werden. Im pulsweitenmodulierten Signal entspricht das einer Änderung der Einstelldauer um ±900µs um einen Mittelwert von 1,5ms. Die Periodendauer beträgt 20ms. Abbildung 1.62 zeigt das Signal über der Zeit für den Mittelwert und die Endpositionen. Abbildung 1.62: Pulsweitenmoduliertes Signal für Servos Hier stellt sich auch einer der Nachteile heraus. Der Motor kann sich immer nur in einem bestimmten Bereich drehen. Komplette Drehungen sind nicht möglich. Im Modellbaubereich, z. B. zur Steuerung der Lenkung eines Modellautos, oder in unserem Fall, in dem wir die Servomotoren brauchen um die Gelenke darzustellen, die auch beim Menschen nur einen eingeschränkten Bewegungsbereich haben, sind sie ideal. Ansteuerung der Servomotoren Die Servomotoren am Roboterarm werden über eine Platine angesteuert, die im Folgenden ServoControl genannt wird. Diese Platine kann per USB an einen Computer angeschlossen werden und ermöglicht diesem dann die Kommunikation mit einem angeschlossenen Mikrocontroller. Diese Platine enthält einen Mikrocontroller ATmega8 der Firma Atmel, der die PWM-Signale für acht Servos generieren kann. Ein Interfacechip von FTDI ermöglicht die serielle Kommunikation über USB, um die Sollwerte vom PC aus vorgeben zu können. Das Protokoll dieser Kommunikation besteht aus der ID des anzusteuernden Motors (0-7) gefolgt von Werten von 600 bis 2400, welche die Einschaltdauer in µs und so die Stellung des Motors angeben. Diese Werte erhält der Mikrocontroller von einem FTDI-Chip, der für die Kommunikation zwischen PC und dem ATmega sorgt. Da sich der FTDI 232 RL als virtueller COM-Port betreiben lässt, ist ServoControl universell einsetzbar. In unserem Fall verwenden wir die Programmierumgebung LabVIEW von National Instruments. Abbildung 1.63: Schaltplan des ServoControl Programmierung der Servomotoren in LabVIEW LabVIEW unterstützt die direkte Kommunikation über COM-Ports von Haus aus. Dadurch gestaltet sich ein großer Teil der Programmierung relativ einfach. Zuerst muss die Verbindung mit dem ServoControl hergestellt werden. Zu diesem Zweck wurde uns eine bereits erstellte Funktion, ein sogenanntes virtuelles Instrument von Wolfhard zur Verfügung gestellt. Dieses initialisiert zunächst die serielle Kommunikation. Dies muss nur am Start des Programmes durchgeführt werden. Daher folgt nun eine Schleife, in der die Benutzereingaben abgefragt und die Werte an ServoControl gesendet werden. Eine Wertänderung kann entweder vom Benutzer hervorgerufen oder per Variable übergeben werden. Soll nun ein Wert gesendet werden, so wird zuerst die ID des Servomotors und dann die Position übergeben. Wenn die Schleife abgebrochen wird, wird die Verbindung beendet. Dabei muss sich das Programm am Ende von der Schnittstelle abmelden, damit diese für weiteren Datenaustausch zur Verfügung steht. Benutzeroberfläche der Armsteuerung An Abbildung 1.64 ist eine beispielhafte Benutzeroberfläche zu sehen. Abbildung 1.64: Benutzeroberfläche der Armsteuerung: 1.: Auswahl des virtuellen COM-Ports des ServoControls 2.: Button zur Unterbrechung der Schleife 3.: Schieberegler für die einzelnen Gelenke Hier sind die einstellbaren Werte auf Winkel von -90° bis 90° bezogen. Diese werden intern umgerechnet und dann jeweils an den ServoControl geschickt. Das Fahrwerk Battull Safieddine, Mareike Lauer, Philipp Bechtel Wie im “Star Wars“ Film fährt unser R2D2 auf drei Beinen, wovon zwei feststehend sind und eines einziehbar ist. Die beiden äußeren Beine werden zur Fortbewegung von Getriebemotoren angetrieben. Das dritte Bein wird als Stütze benutzt um das Gewicht des Roboters zu halten und ihn vor dem Umkippen beim Anfahren und Bremsen zu bewahren. Wenn R2D2 steht wird das Stützbein eingezogen. Abbildung 1.65: R2D2 im Ruhemodus und während der Fahrt Abbildung 1.66: Bildausschnitt Schrittmotor zum Bewegen des Stützbeins So viel zur Theorie… Doch als wir den Schrittmotor für das Bein ausprobierten, mussten wir feststellen, dass er niemals genug Kraft aufbringen würde das Bein schnell genug einzuziehen, da wir nicht genügend Leistung zur Verfügung hatten. Um mit großer Kraft schnell laufen zu können, muss der Schrittmotor mit hoher Spannung betrieben werden, sonst gehen Schritte verloren. Das setzt eine wesentlich aufwendigere Ansteuerung voraus als wir sie aufbauen konnten. Die Ansteuerung der Getriebemotoren Die Getriebemotoren des R2D2 werden über die Schaltung in Abbildung 1.67 angesteuert. Die Laststromkreise der Schaltung werden direkt an die beiden 12 V Akkus angeschlossen, die jeweils mit einer 30 A - Sicherung vor Überlastströmen geschützt werden. Die Stromversorgung der beiden Fahrtregler kann durch jeweils ein Relais unterbrochen werden. Die Fahrtregler stammen aus dem Modellbau und versorgen die auf jeder Seite paarweise angeordneten Getriebemotoren mit Strom. Die Fahrtregler werden über eine Steuerplatine angesteuert, welche durch einen USB Anschluss an den Computer angeschlossen ist. Die Fahrtregler ermöglichen die stufenlose Regelung der Getriebemotoren, indem sie die Spannung an den Motoren verändern. Die Relaisspulen liegen in einem gemeinsamen Steuerstrompfad, in dem außerdem ein Hauptschalter und ein Transistor enthalten sind. Der Transistor ermöglicht die Ansteuerung der Relais über ein Computerinterface. Wir verwenden ein USB 6008 Data Acquisition Modul (DAQ) von National Instruments. Der Hauptschalter dient zum manuellen Abschalten beider Antriebseinheiten und kann so eine Not-Aus-Funktion erfüllen. Das oben angesprochene DAQ wird mit einer von uns in LabVIEW entwickelten Software bedient. Die 5 V Versorgungsspannung, die über einen 680 Ω Widerstand an die Basis des Transistors angeschlossen ist, garantiert, dass der Transistor genügend Strom erhält und somit schaltet, wenn am hochohmigen Ausgang des Data Acquisition Modul ein High-Pegel anliegt. Die Diode, die parallel zu den beiden Relais geschaltet ist, schützt den Transistor vor Gegenspannungen, die beim Abschalten der Spulen induziert werden. Abbildung 1.67: Schaltplan eines Getriebemotors Die Software Die Software, die R2D2 das Fahren beigebracht hat, stellt dem Benutzer im Frontpanel zwei stufenlos verstellbare Schieberegler zur Verfügung. Der erste Schieberegler (1), der in Abbildung 1.68 gekennzeichnet ist, ist für die Geschwindigkeit verantwortlich, mit der sich R2D2 bewegt. Wird der Regler in den positiven Bereich verschoben, bewegt sich R2D2 nach vorne, wird er in den negativen Bereich geschoben fährt R2D2 rückwärts. Mit dem zweiten Schieberegler (2), der ebenfalls in Abbildung 1.68 gekennzeichnet ist, lässt sich das Geschwindigkeitsverhältnis der beiden Motoren einstellen. R2D2 fährt dementsprechend nach links, wenn der Regler nach links in den negativen Bereich verschoben und nach rechts, wenn er in den positiven Bereich verschoben wird. Der Schalter (3) dient dem Abschalten der beiden Motoren unabhängig von den beiden Schiebereglern. In Abbildung 1.67 bewirkt dieser Schalter ob der Transistor schaltet oder sperrt, bzw. ob die Fahrtregler mit Spannung versorgt werden. 1 3 2 Abbildung 1.68: Oberfläche des Ansteuerprogramms